
A Novel Hardware-in-the-Loop Approach to Investigate the Impact of Low System Inertia on RoCoF Relay Settings


Abstract
:1. Introduction
1.1. Decreasing Inertia in the Great Britain Electrical Power System
1.2. Approaches to Minimize the Risk of Loss of Mains Relay Mal-Operation
1.3. Observations and Investigation of Frequency Phenomena in the GB Transmission System
2. The Reduced Model of the GB Transmission System
2.1. Origins of the Reduced Model
2.2. Original Design of Reduced Model—Version 2012
2.3. PowerFactory Compatibility with ePHASORSIM
2.4. Updates to the Reduced Model for Real Time Simulation—Version 2020
- (1)
- Nodes and switches: The zone models were reduced to single busses and only essential switches were left in the model, in order to reduce the number of nodes and increase the speed of computation.
- (2)
- Controllers: The original non-standard controllers for the synchronous generators in the reduced model were substituted with standard IEEE controllers (IEEE—Institute of Electrical and Electronics Engineers) in order to achieve compatibility with ePHASORSIM: AVRs were replaced with the standard IEEE EXST1 model, governors with TGOV1 and stabilisers with STAB1. The standard IEEE controllers had their settings modified in a two-stage process:
- (a)
- The step response of each IEEE model type (EXST1, TGOV1, and STAB1) was separately tuned to match the step response of the corresponding user-defined controller in the reduced model;
- (b)
- Using PMU measurement data from an actual system event, the TGOV1 parameters were then further adjusted so that the frequency response in the model matched the observed event response.
- (3)
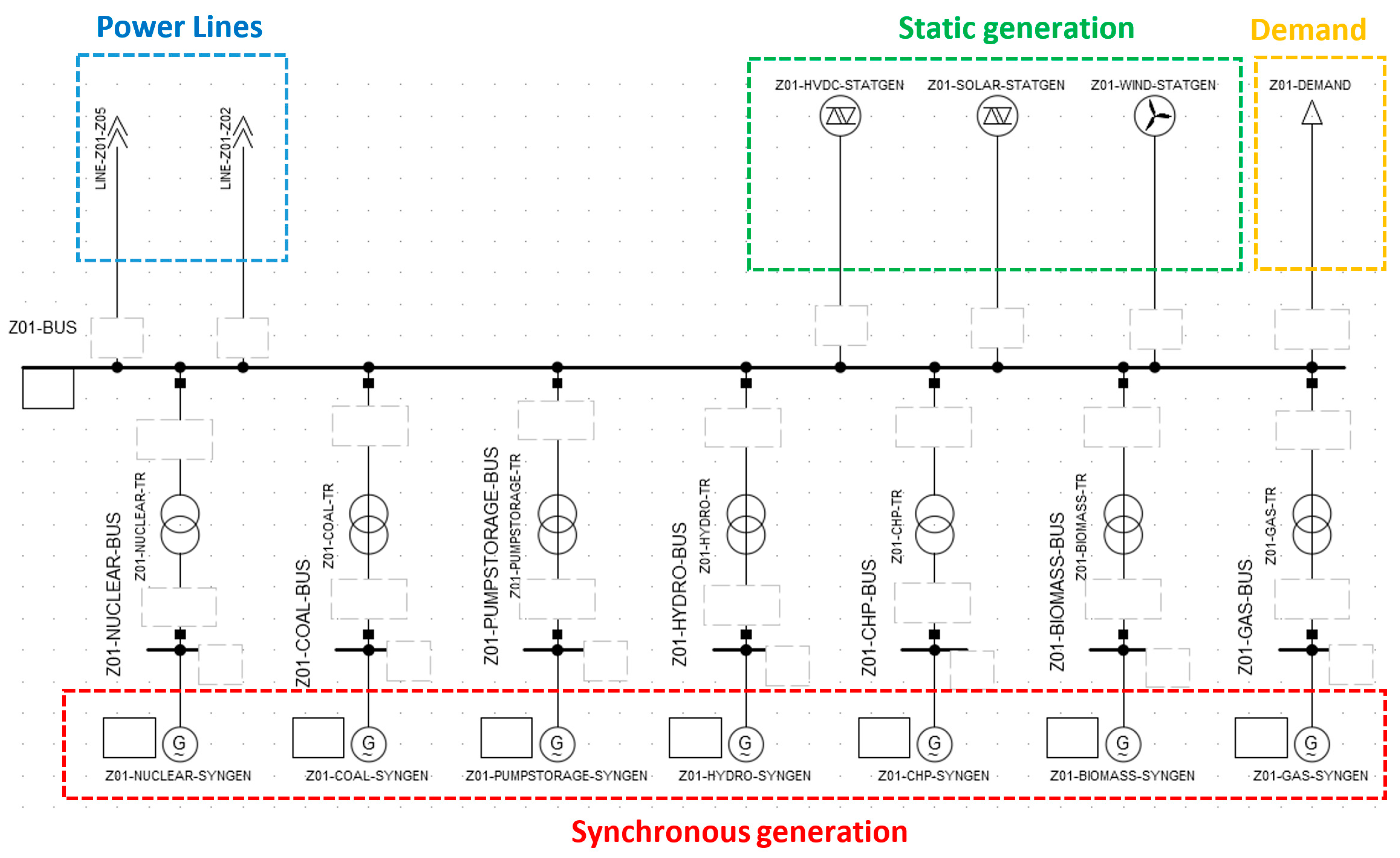
- Synchronous generation: Synchronous generators were updated to represent the following types of generation: nuclear, coal, pumped storage, hydro, combined heat and power (CHP), biomass and gas. Oil generation was removed from the model because this generation type is no longer in service in GB. “Other” generation was also removed because all the significant generation types were included.
- (4)
- Static generation: The complex HVDC LCC model was replaced by a simple static generator/load. Solar generation was added to the model in static form, so that static load/generation is used to represent HVDC links, solar and wind generation.
- (5)
- Substation module vs. grouped symbol: The original PowerFactory model contains zones represented as a substation type. For compatibility with OPAL-RT, the zones were not used as a substation module, but as grouped graphical objects.
3. Reduced Model Implementation for HIL Simulations
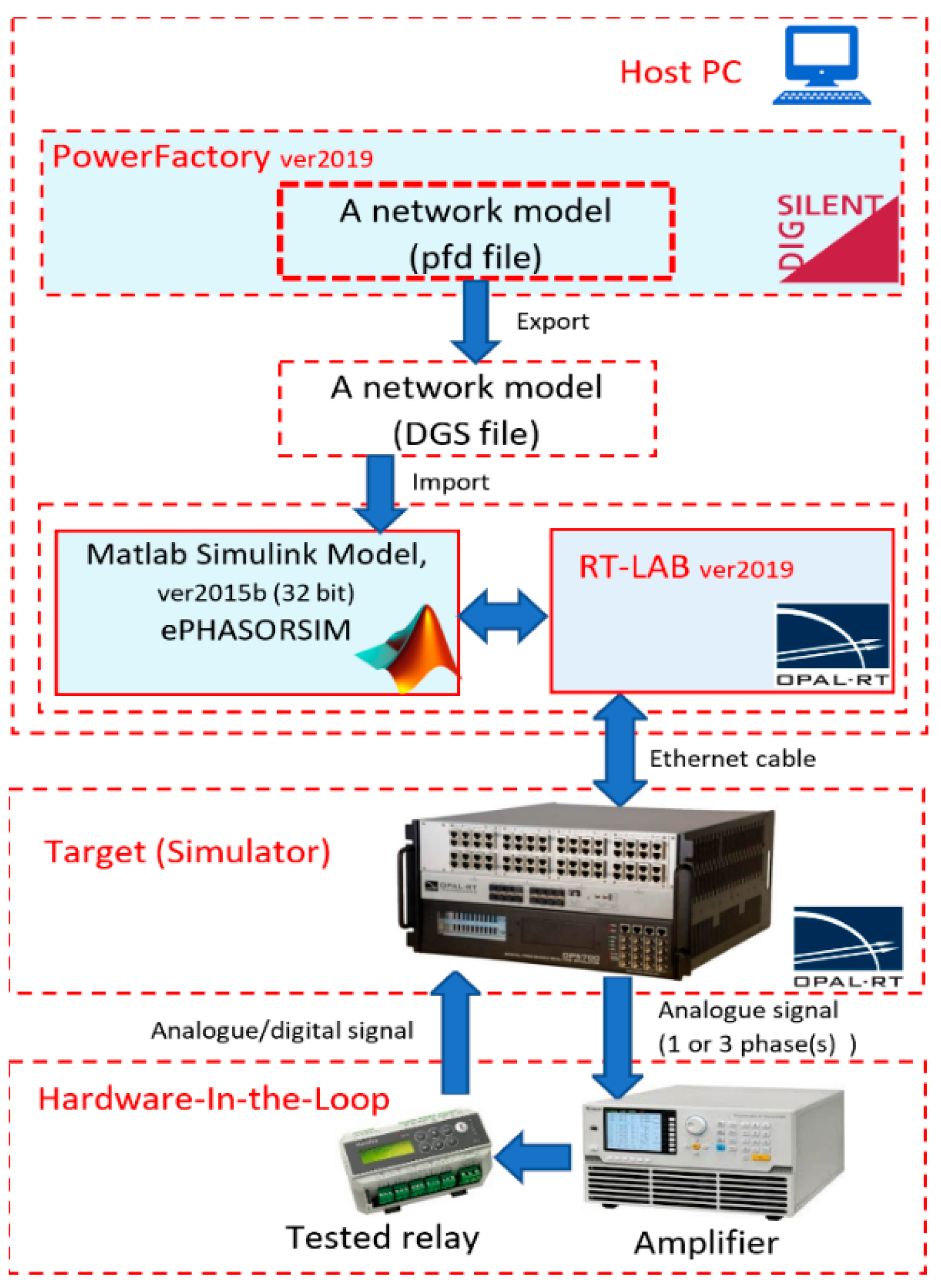
3.1. An Overview of the Model Conversion and Implementation
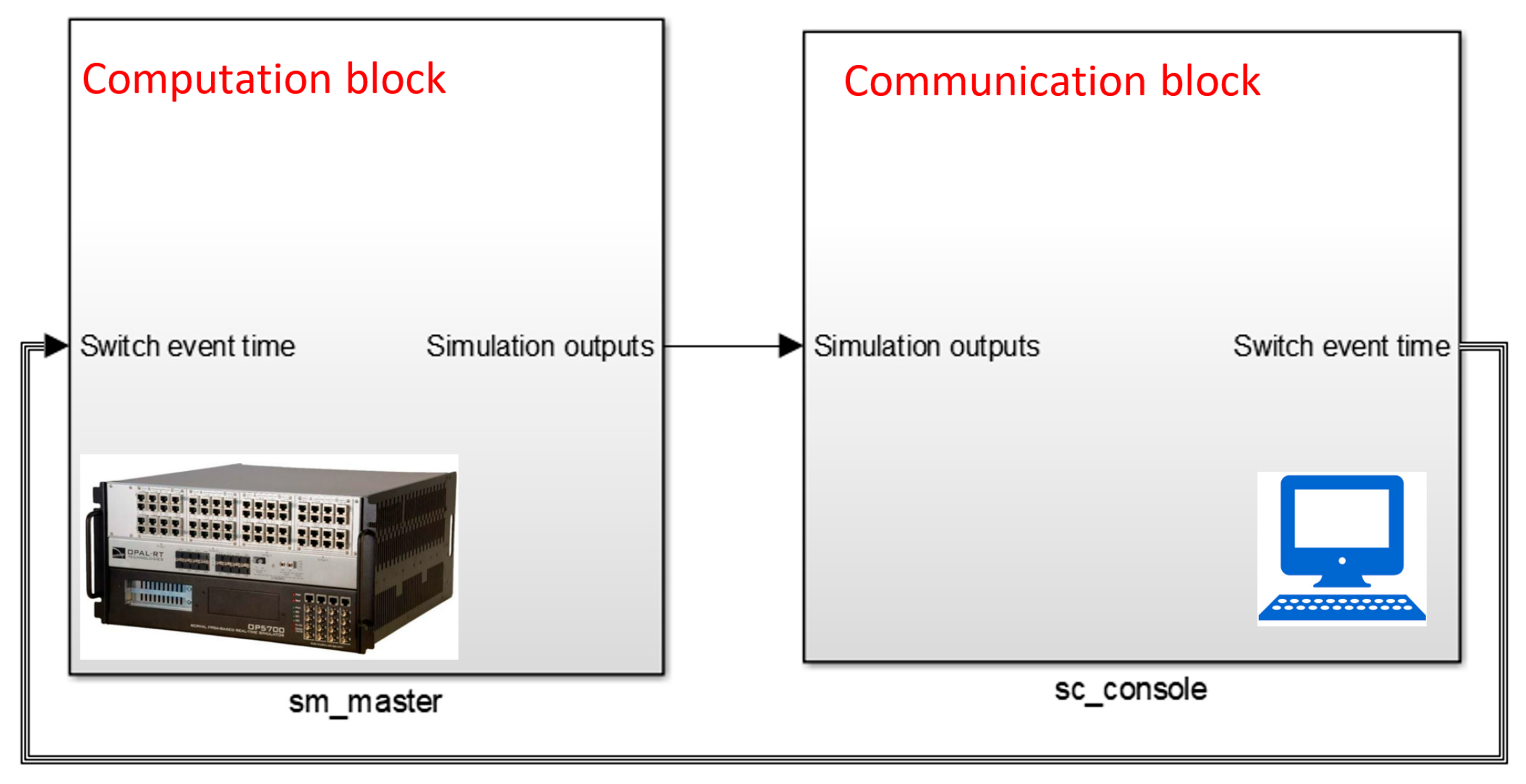
3.2. Simulink Model Definition
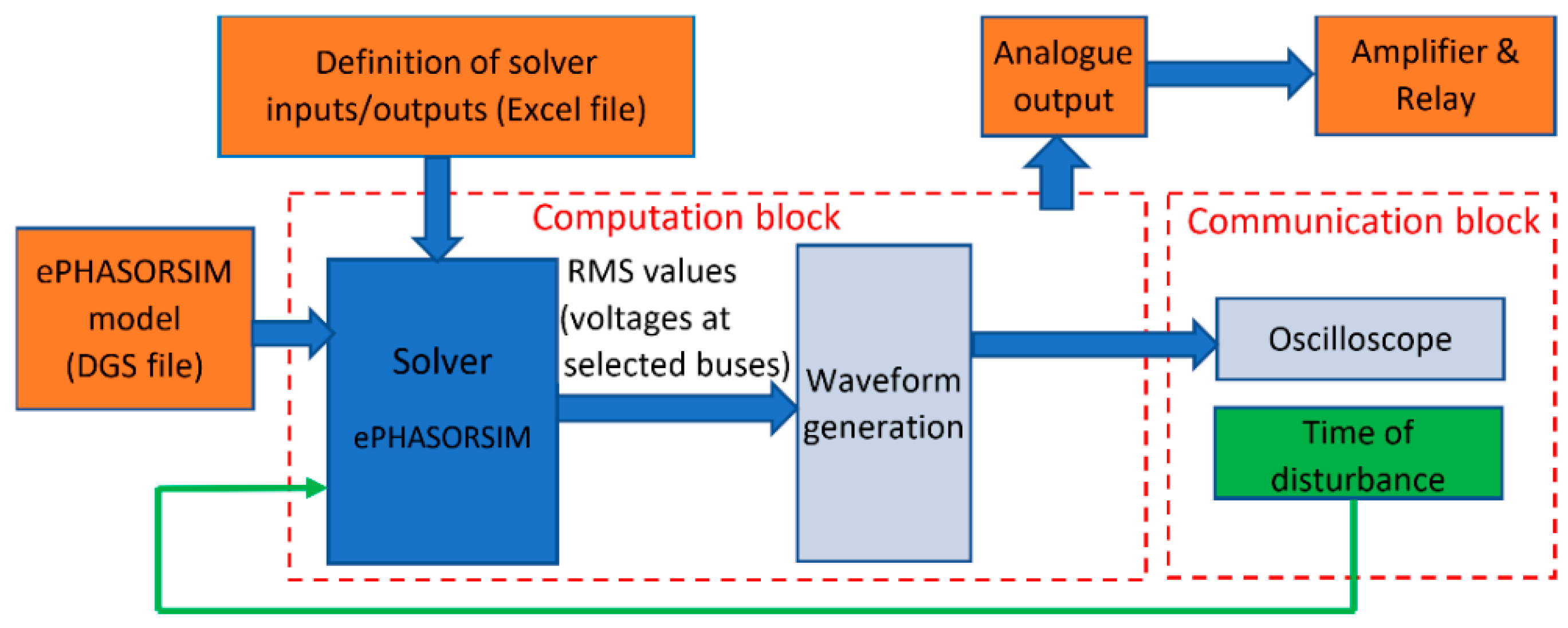
3.3. Physical Output of the Simulator
4. Reduced Model Validation against PMU Data
4.1. The GB System Case Study
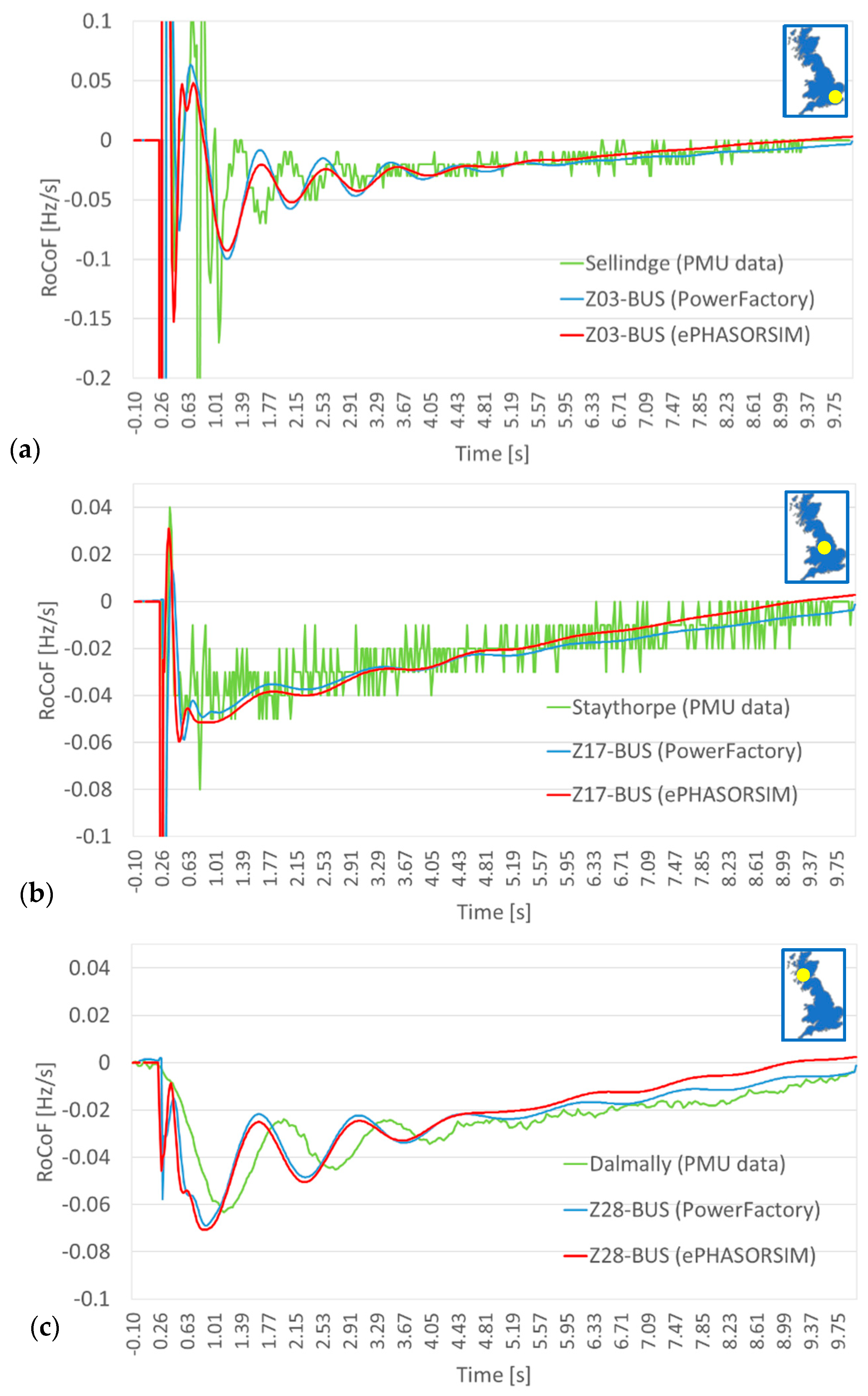
4.2. The PMU Recordings at Selected Locations
4.3. Reduced Model Update with Event Conditions
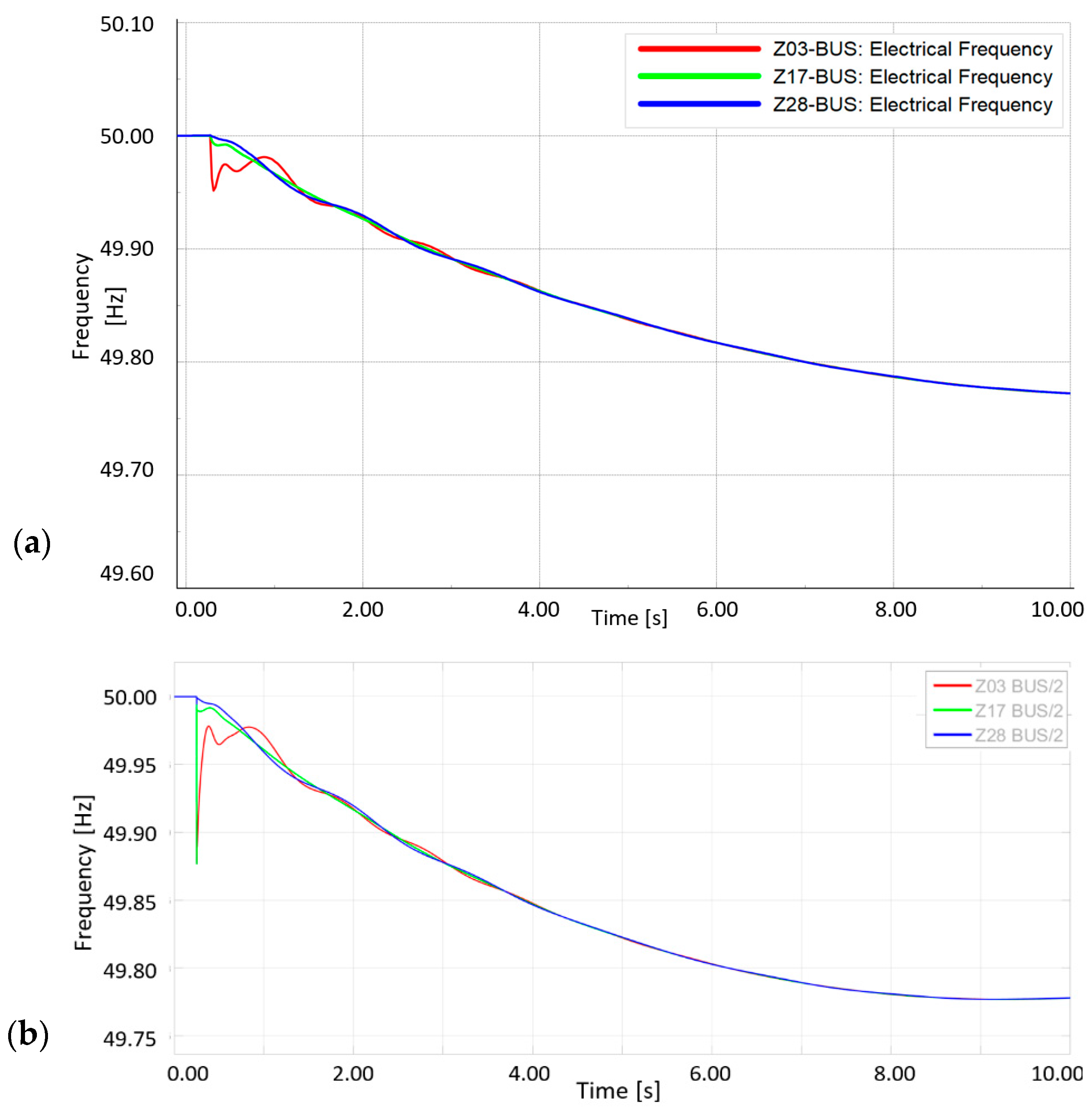
4.4. PowerFactory and ePHASORSIM Simulations
5. HIL Case Studies
5.1. ComAp MainsPro Relay Specification
5.2. Mechanical Frequency Response Behaviour (The “System-Wide” Component of RoCoF)
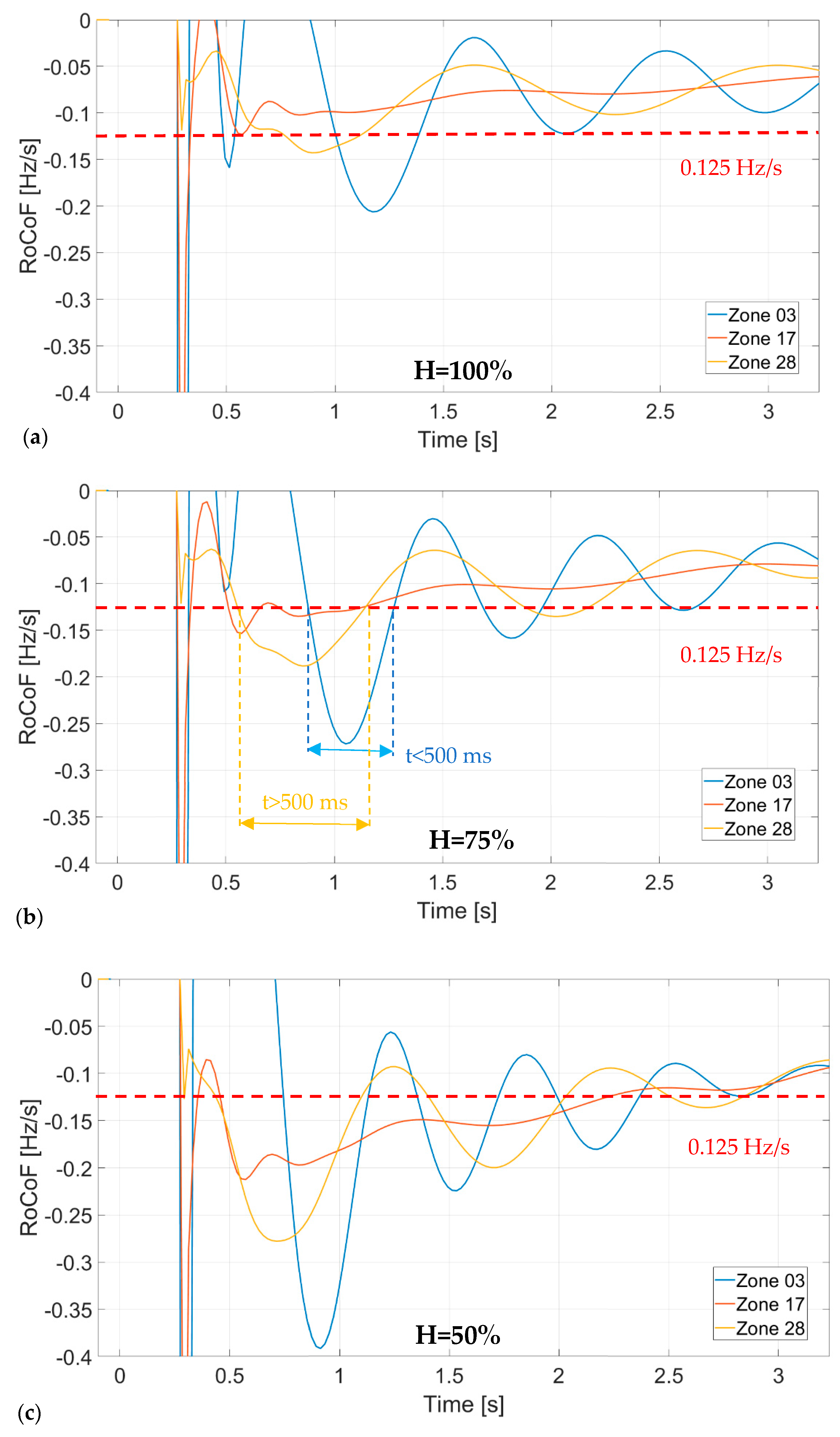
5.3. Impact of Electro-Mechanical Frequency Modes on Locational RoCoF
5.4. Verification of Results with HIL Studies
6. Conclusions and Future Research
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- National Grid Electricity System Operator. Operating a Low Inertia System. 2020. Available online: www.nationalgrideso.com/document/164586/download (accessed on 1 May 2020).
- Hewes, D.; Boiarchuk, I.; Witzmann, R.; Altschaeffl, S. Impacts of Reduced Rotational Inertia on Frequency Stability in the European Transmission System. In Proceedings of the CIGRE Symposium 2017, Dubllin, Ireland, 29 May–2 June 2017. [Google Scholar]
- Imris, P.; Taylor, G.A.; Pisica, I. Investigation & Modelling of Fast Frequency Phenomena—WP1; Brunel University London: London, UK, 2019. [Google Scholar]
- Energy Networks Association. Loss of Mains Protection Settings for All Small Generators, Stakeholder Workshop; Energy Networks Association: London, UK, 2018. [Google Scholar]
- Laverty, D.M.; Best, R.J.; Morrow, D.J. Loss-of-mains protection system by application of phasor measurement unit technology with experimentally assessed threshold settings. IET Gener. Transm. Distrib. 2015, 9, 146–153. [Google Scholar] [CrossRef]
- National Grid Electricity System Operator. Technical Report on the Events of 9 August 2019; NGESO: Warwick, UK, 2019. [Google Scholar]
- National Grid Electricity System Operator. Monthly Balancing Services Summary (MBSS). 2022. Available online: https://data.nationalgrideso.com/balancing/mbss (accessed on 1 July 2022).
- Energy Networks Association. Engineering Recommendation G59, Issue 3 Amendment 7, Recommendations for the Connection of Generating Plant to the Distribution Systems of Licensed Distribution Network Operators; Energy Networks Association: London, UK, 2019. [Google Scholar]
- Energy Networks Association. Engineering Recommendation G99, Issue 1—Amendment 1. 2018. Available online: www.dcode.org.uk/assets/uploads/ENA_EREC_G99_Issue_1_Ammendment_1_2018_1.pdf (accessed on 1 November 2020).
- Energy Networks Association. Accelerated Loss of Mains Change Programme. Available online: www.energynetworks.org/electricity/engineering/accelerated-loss-of-mains-change-programme.html (accessed on 1 November 2020).
- Ashton, P.M.; Saunders, C.S.; Taylor, G.A.; Carter, A.M.; Bradley, M.E. Inertia Estimation of the GB Power System Using Synchrophasor Measurements. IEEE Trans. Power Syst. 2015, 30, 701–709. [Google Scholar] [CrossRef]
- Adrees, A.; Milanović, J.V.; Mancarella, P. Effect of inertia heterogeneity on frequency dynamics of low-inertia power systems. IET Gener. Transm. Distrib. 2019, 13, 2951–2958. [Google Scholar] [CrossRef]
- Osbouei, B.A.; Taylor, G.A.; Bronckart, O.; Maricq, J.; Bradley, M. Impact of Inertia Distribution on Power System Stability and Operation. In Proceedings of the IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019. [Google Scholar]
- Gonzalez-Longatt, F.; Chikuni, E.; Rashayi, E. Effects of the Synthetic Inertia from wind power on the total system inertia after a frequency disturbance. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013. [Google Scholar]
- Junyent-Ferr, A.; Pipelzadeh, Y.; Green, T.C. Blending HVDC-Link Energy Storage and Offshore Wind Turbine Inertia for Fast Frequency Response. IEEE Trans. Sustain. Energy 2015, 6, 1059–1066. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Yang, G.; Nielsen, A.H.; Jensen, P.H. Combination of Synchronous Condenser and Synthetic Inertia for Frequency Stability Enhancement in Low-Inertia Systems. IEEE Trans. Sustain. Energy 2019, 10, 997–1005. [Google Scholar] [CrossRef] [Green Version]
- Beck, H.P.; Hesse, R. Virtual synchronous machine. In Proceedings of the 9th International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007. [Google Scholar]
- Qoria, T.; Gruson, F.; Colas, F.; Guillaud, X.; Debry, M.S.; Prevost, T. Tuning of Cascaded Controllers for Robust Grid-Forming Voltage Source Converter. In Proceedings of the Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018. [Google Scholar]
- National Grid Electricity System Operator. National Grid ESO Outline New Approach to Stability Services in Significant Step Forwards towards a Zero-Carbon Electricity System. Available online: www.nationalgrideso.com/media/national-grid-eso-outline-new-approach-stability-services-significant-step-forwards-towards (accessed on 1 April 2020).
- Imris, P.; Bradley, M.; Taylor, G.; Gordon, M.; Li, Y. Enhanced visualisation of Fast Frequency Phenomena as exhibited in the GB transmission system. In Proceedings of the 54th International Universities Power Engineering Conference, Bucharest, Romania, 3–6 September 2019. [Google Scholar]
- SP Energy Networks. Visualisation of Real Time System Dynamics using Enhanced Monitoring (VISOR)—Close Down Report. 2018. Available online: www.spenergynetworks.co.uk/pages/visor.aspx (accessed on 1 May 2020).
- National Grid. Electricity Ten Year Statement 2018; National Grid Plc.: Warwick, UK, 2018. [Google Scholar]
- Rostom, D. Creation of a Reduced Model for the GB Network; National Grid: Warwick, UK, 2013. [Google Scholar]
- Imris, P.; Bradley, M.; Taylor, G.; Li, Y. Validation of dynamic GB transmission system models with PMU data for hardware-in-the-loop studies. In Proceedings of the 15th International Conference on Developments in Power System Protection, Liverpool, UK, 9–12 March 2020. [Google Scholar]
- NGESO Electricity Ten Year Statement 2020, Appendix A, Figure A5. Available online: https://www.nationalgrideso.com/document/181716/download (accessed on 1 July 2022).
- Jalili-Marandi, V.; Ayres, F.J.; Ghahremani, E.; Bélanger, J.; Lapointe, V. A real-time dynamic simulation tool for transmission and distribution power systems. In Proceedings of the IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar]
- OPAL-RT. ePHASORSIM User Guide. Available online: www.opal-rt.com/systems-ephasorsim/ (accessed on 1 October 2019).
- ComAp. ComAp-MainsPRO. ComAp. Available online: www.comap-control.com/products/detail/mainspro (accessed on 1 April 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AVR PARAMETERS-EXST1 | |
| Parameter Name | Value |
| Tr Measurement Delay [s] | 0.02 |
| Tb Filter Delay Time [s] | 100 |
| Tc Filter Derivative Time Constant [s] | 5 |
| Ka Controller Gain [p.u.] | 50 |
| Ta Controller Time Constant [s] | 0.02 |
| Kc Exciter Current Compensation Factor [p.u.] | 0.04 |
| Kf Stabilisation Path Gain [p.u.] | 0.02 |
| Tf Stabilisation Path Delay time [s] | 0.7 |
| Vimin Controller Minimum Input [p.u.] | −0.1 |
| Vrmin Controller Minimum Output [p.u.] | −7 |
| Vimax Controller Maximum Input [p.u.] | 0.1 |
| Vrmax Controller Maximum Output [p.u.] | 7 |
| GOVERNOR PARAMETERS-TGOV1 | |
| Parameter name | Value |
| T3 Turbine Delay Time Constant [s] | 300 |
| T2 Turbine Derivative Time Constant [s] | 0.1 |
| At Turbine Power Coefficient [p.u.] | 0.1 |
| Dt Frictional Losses Factor [p.u.] | −0.1 |
| R Controller Droop [p.u.] | 0.1 |
| T1 Governor Time Constant [s] | 150 |
| PN Turbine Rated Power (=0->PN = Pgnn) [MW] | 0 |
| Vmin Minimum Gate Limit [p.u.] | 0 |
| Vmax Maximum Gate Limit [p.u.] | 10 |
| PSS PARAMETERS-STAB1 | |
| Parameter name | Value |
| K Stabilizer Gain [p.u.] | 150 |
| T Washout integrate time constant [s] | 20 |
| T2 Second Lead/Lag derivative time constant [s] | 0.5 |
| T4 Second Lead/Lag delay time constant [s] | 0.1 |
| T1 First Lead/Lag derivative time constant [s] | 0.5 |
| T3 First Lead/Lag delay time constant [s] | 10 |
| HLIM Signal pss maximum [p.u.] | 0.03 |
| Location of PMU Recorder in the GB Transmission System | Reduced Model Equivalent Location |
|---|---|
| Sellindge substation | Zone 03 |
| Staythorpe substation | Zone 17 |
| Dalmally substation | Zone 28 |
| H [%] | Zone 03 | Zone 17 | Zone 28 |
|---|---|---|---|
| 100 | NO | NO | NO |
| 80 | NO | NO | YES |
| 70 | NO | YES | YES |
| 50 | YES | YES | YES |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Imris, P.; Taylor, G.A.; Bradley, M.E.; Li, Y. A Novel Hardware-in-the-Loop Approach to Investigate the Impact of Low System Inertia on RoCoF Relay Settings. Energies 2022, 15, 6386. https://doi.org/10.3390/en15176386
Imris P, Taylor GA, Bradley ME, Li Y. A Novel Hardware-in-the-Loop Approach to Investigate the Impact of Low System Inertia on RoCoF Relay Settings. Energies. 2022; 15(17):6386. https://doi.org/10.3390/en15176386
Chicago/Turabian StyleImris, Peter, Gareth A. Taylor, Martin E. Bradley, and Yun Li. 2022. "A Novel Hardware-in-the-Loop Approach to Investigate the Impact of Low System Inertia on RoCoF Relay Settings" Energies 15, no. 17: 6386. https://doi.org/10.3390/en15176386