
A Novel Model-Free Predictive Control for T-Type Three-Level Grid-Tied Inverters

 ,
,  ,
, 
Abstract
:1. Introduction
- (1)
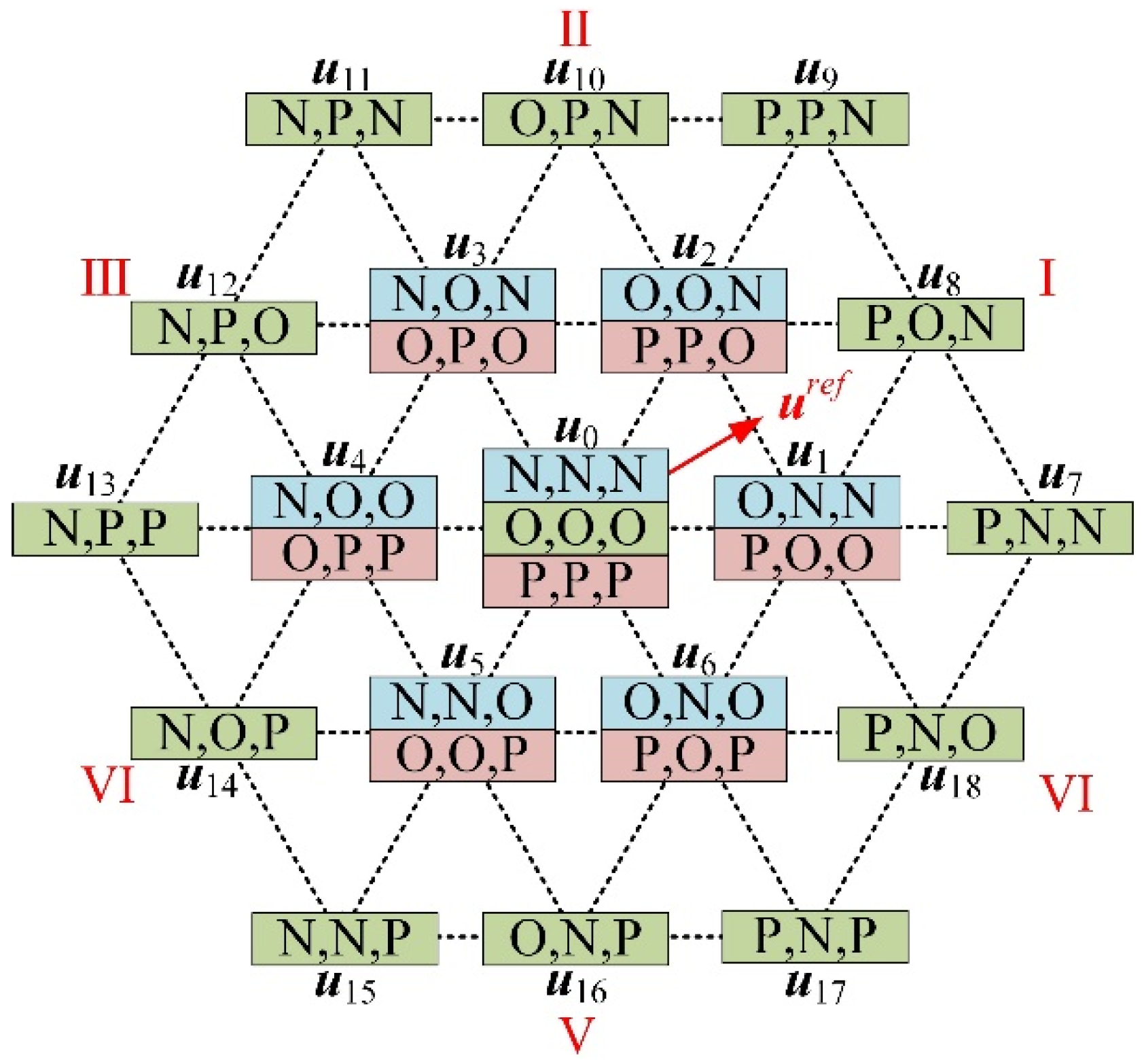
- A simplified look-up table (LUT) is designed. The redundant vector formed by two or three voltage vectors is considered as one corresponding current gradient. Hence, the number of LUTs decreased from 27 to 19.
- (2)
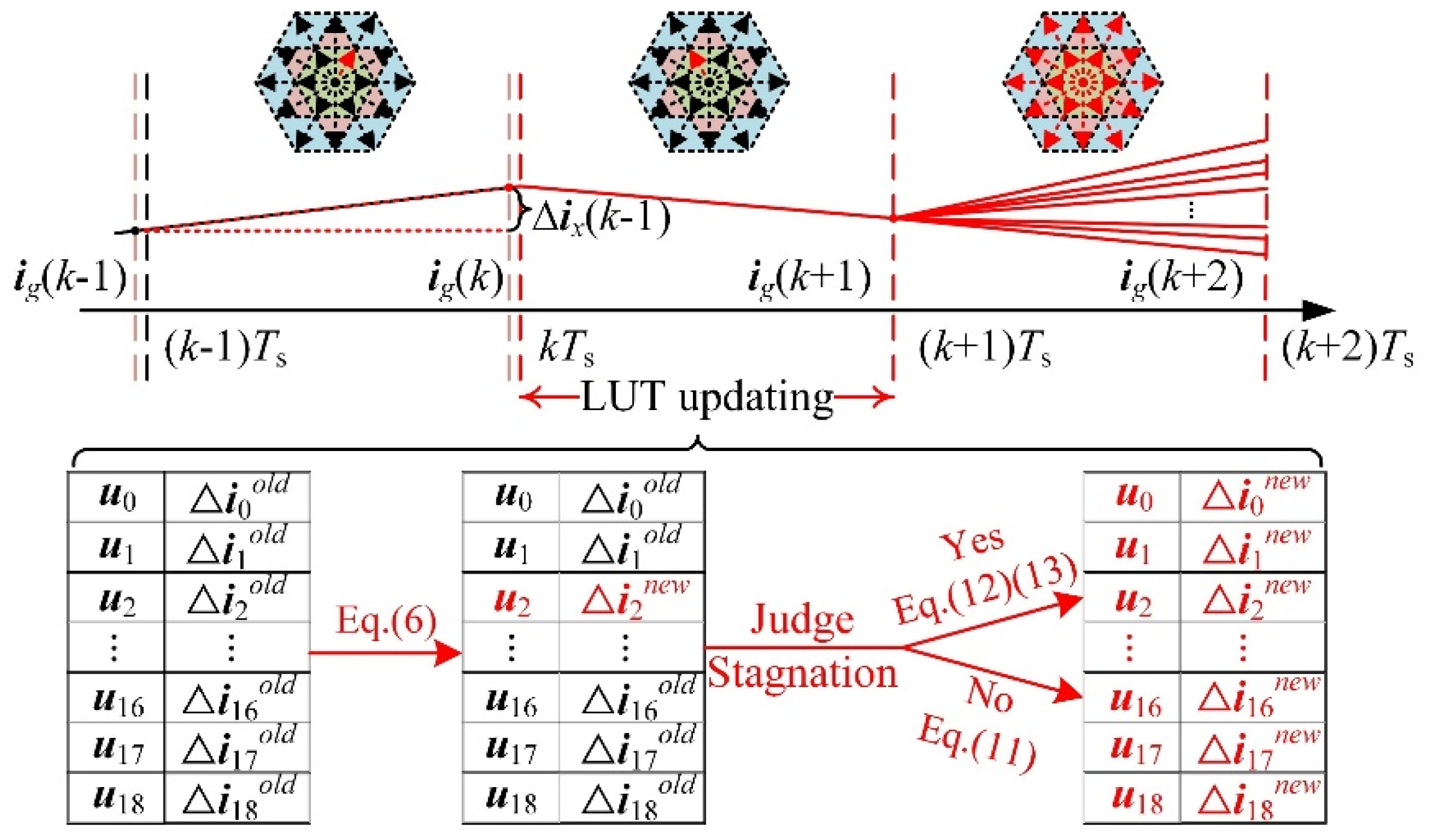
- A novel current gradient updating method is proposed to eliminate the stagnation effect caused by the conventional updating method. The current gradient relationship between different voltage vectors is derived, so all the current gradients can be estimated in each period.
- (3)
- A sector judgment method based on the current gradient is proposed. The proposed judgment method avoids using mathematical models to calculate the reference voltage. Hence, the number of candidate voltage vectors is reduced from 27 to 3, and the calculation speed is greatly improved.
2. Conventional MPC Scheme
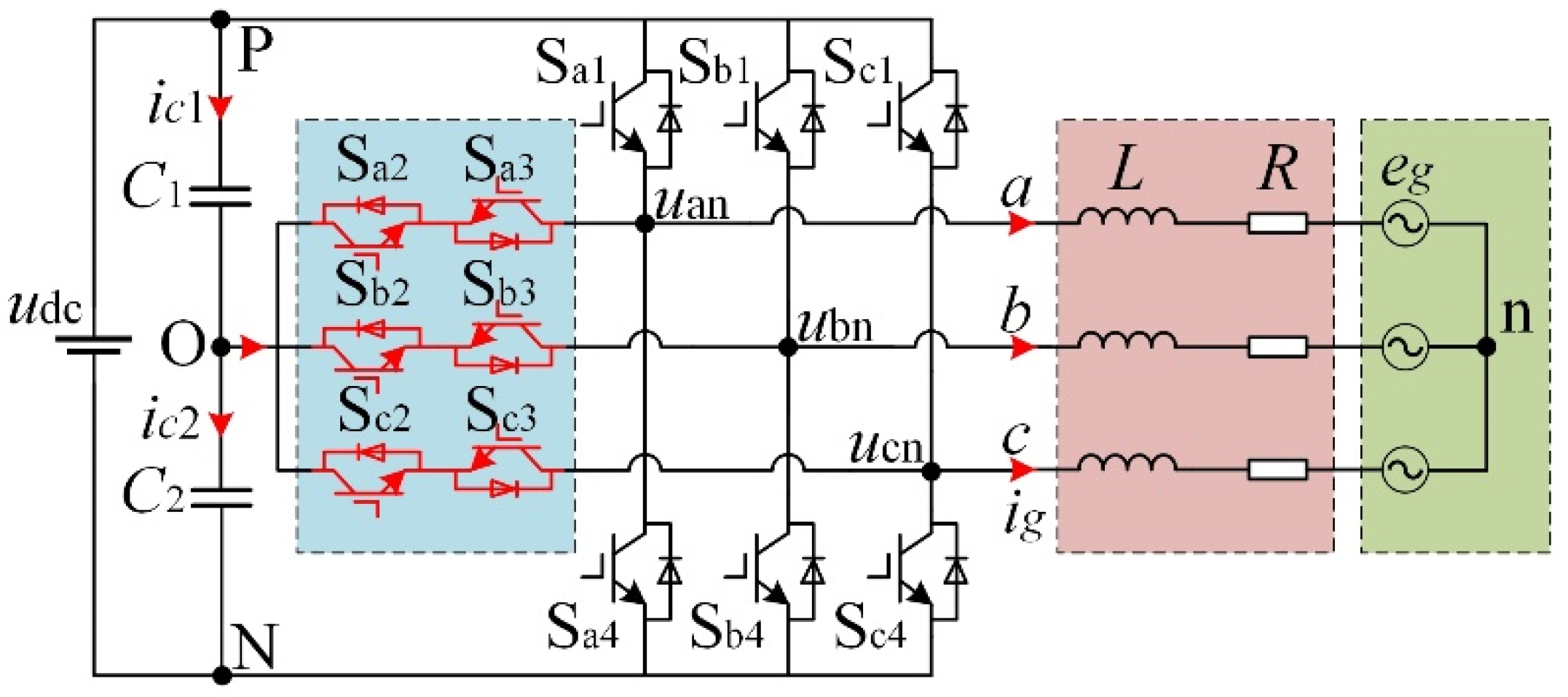
2.1. Topology and Voltage Vectors
2.2. Conventional Predictive Model
3. The Proposed MFPC Scheme
3.1. Basic Principle of MFPC
3.2. Current Gradient Updating Stagnation Effect Analysis
3.3. The Proposed Current Gradient Updating Method
3.4. Proposed Sector Judgment Method
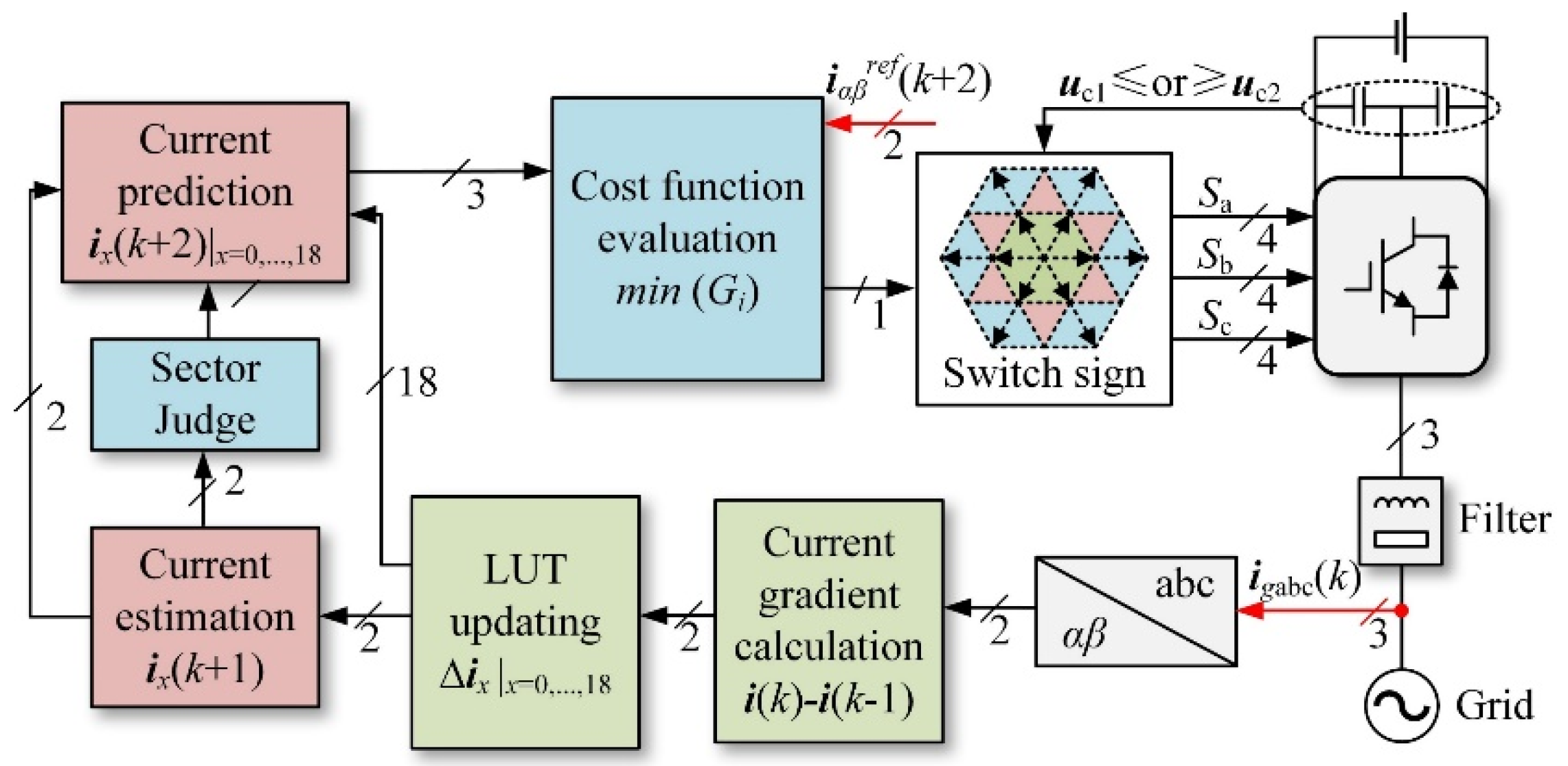
3.5. Implementation Steps
- Step I: Sample the dc-link capacitor voltage uc1(k) and uc2(k), select P-type basic voltage vectors or N-type basic voltage vectors based on uc1(k) − uc2(k) ≤ or >0.
- Step II: Sample the output current ig(k) and calculate current gradient ∆ix(k − 1) by (6).
- Step III: Update the remaining current gradients without stagnation effect by (11), and update the remaining current gradients with stagnation effect by (12) and (13).
- Step IV: Calculate prediction current igx(k + 1) and igx(k + 2) by (7) and (8), respectively.
- Step V: Judge large sectors by (4), and judge small sectors by (14).
- Step VI: Evaluate the cost of the three voltage vectors by (4) and select the optimal vector.
4. Simulation and Experimental Evaluation
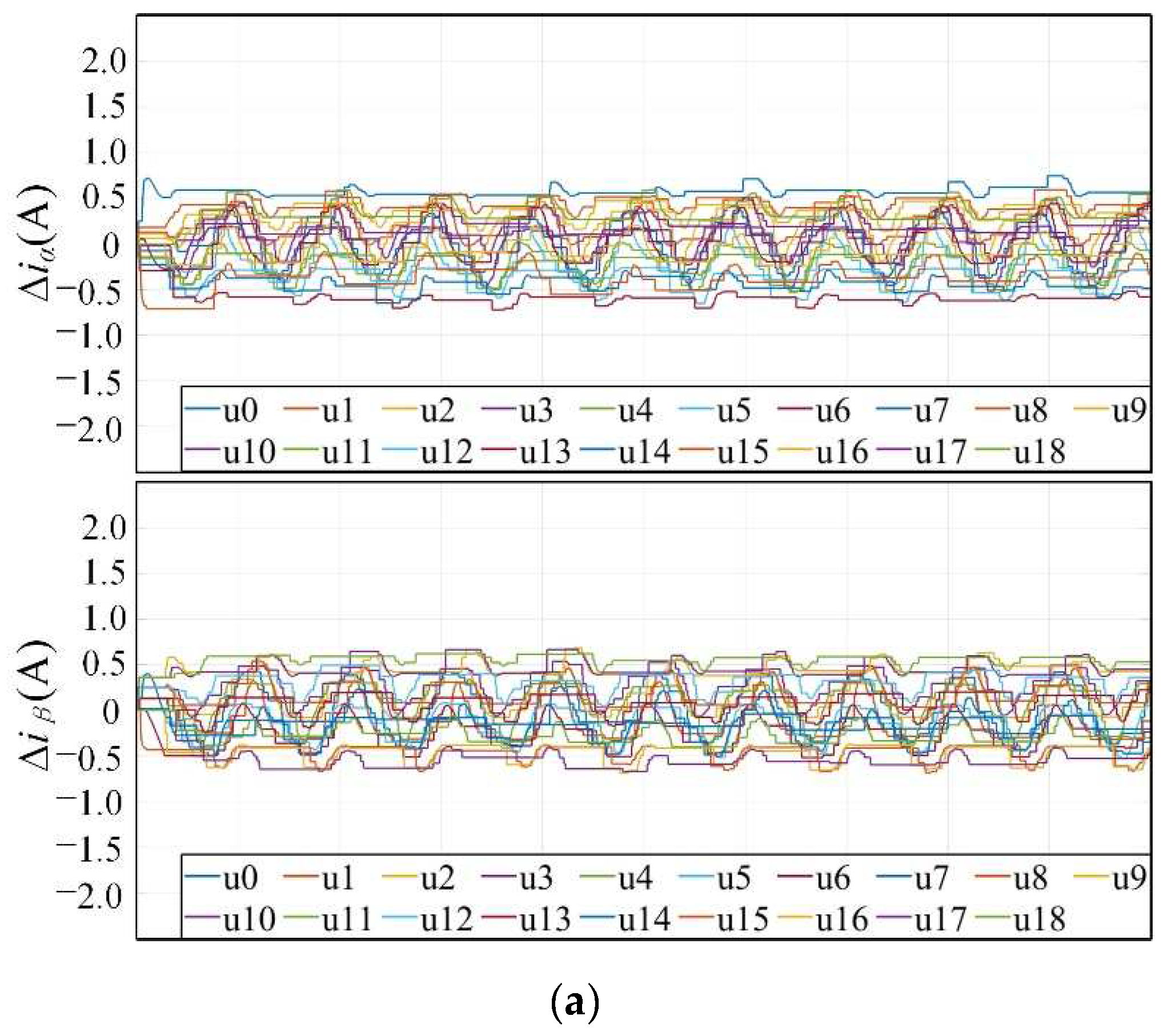
4.1. Impact of Current Gradient Updating Stagnation
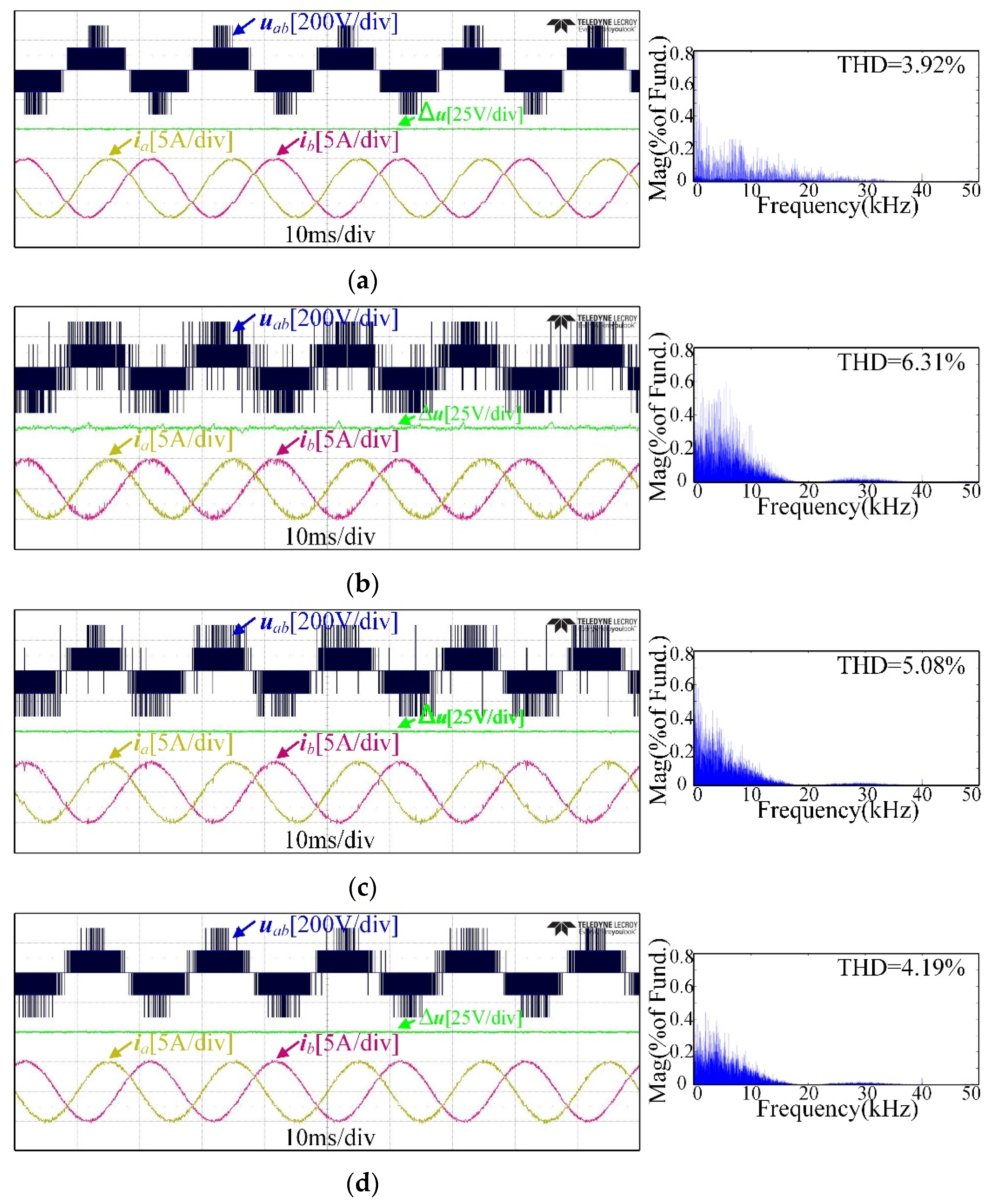
4.2. Steady-State Experimental Evaluation
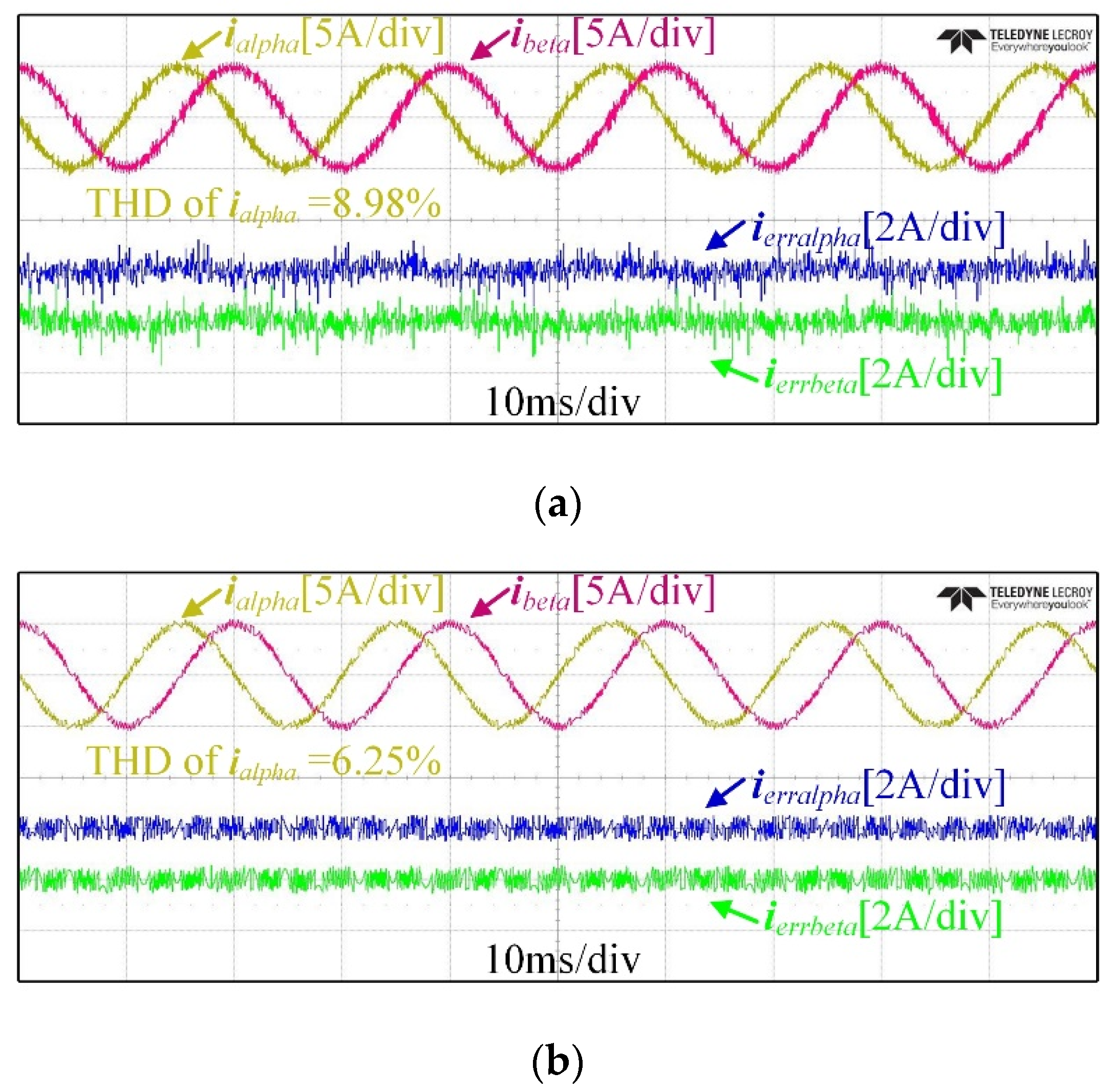
4.3. Experimental Evaluation under Mismatched Model Parameters
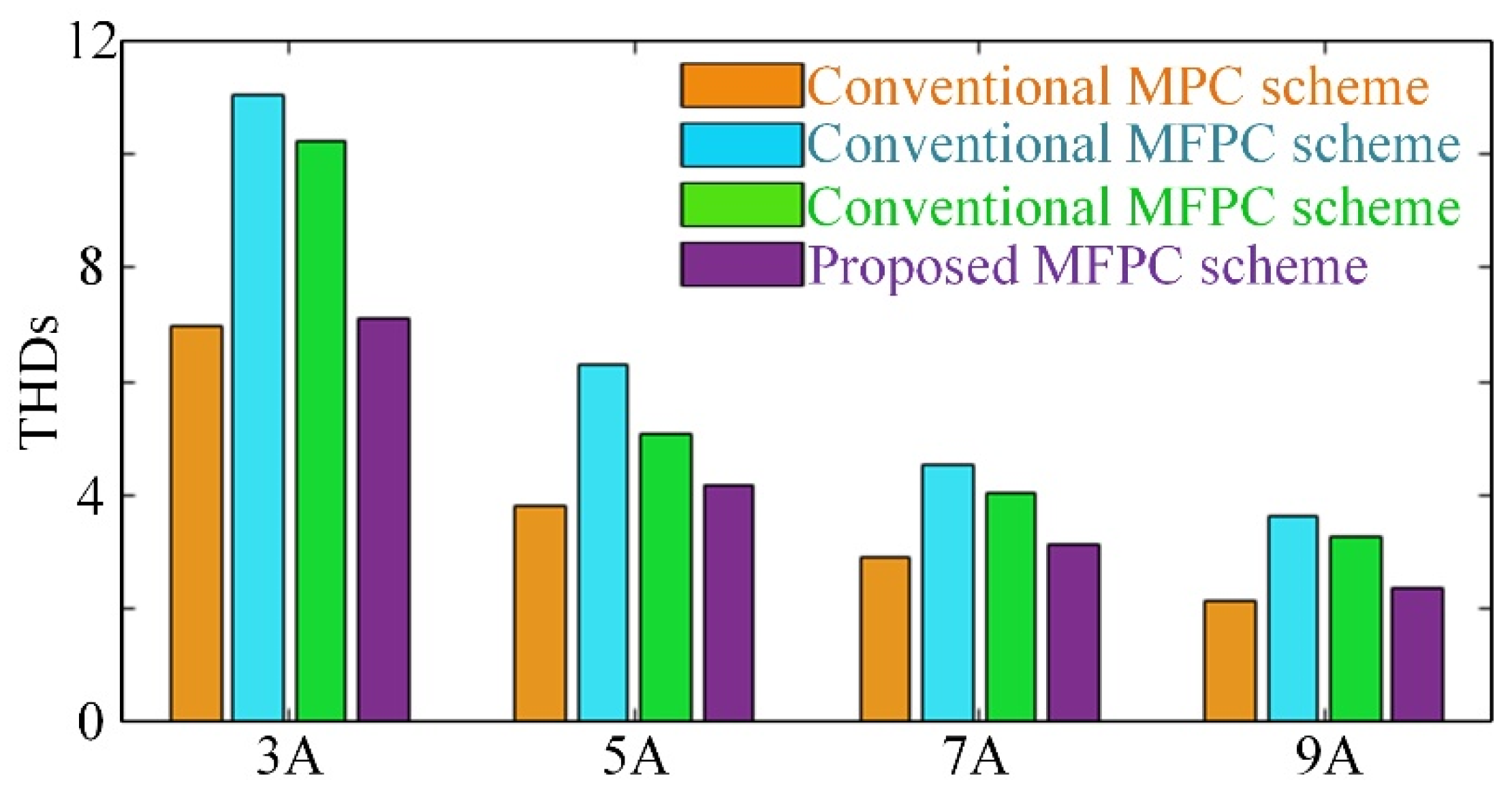
4.4. Performance Comparison of All Schemes
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Z.; Xu, H.; Xue, M.; Chen, Z.; Sun, T.; Kennel, R.; Hackl, C.M. Predictive control with novel virtual-flux estimation for back-to-back power converters. IEEE Trans. Ind. Electron. 2015, 62, 2823–2834. [Google Scholar] [CrossRef]
- Zhao, T.; Chen, D. A power adaptive control strategy for further extending the operation range of single-phase cascaded H-bridge multilevel PV inverter. IEEE Trans. Ind. Electron. 2022, 69, 1509–1520. [Google Scholar] [CrossRef]
- Adefarati, T.; Bansal, R.C. Integration of renewable distributed generators into the distribution system: A review. IET Renew. Power Gener. 2016, 10, 873–884. [Google Scholar] [CrossRef]
- Freddy, T.K.S.; Rahim, N.A.; Hew, W.P.; Che, H.S. Comparison and analysis of single-phase transformerless grid-connected PV inverters. IEEE Trans. Power Electron. 2014, 29, 5358–5369. [Google Scholar] [CrossRef]
- Schweizer, M.; Kolar, J.W. Design and implementation of a highly efficient three-level t-type converter for low-voltage application. IEEE Trans. Power Electron. 2013, 28, 1504–1511. [Google Scholar] [CrossRef]
- Schweizer, M.; Lizama, I.; Friedli, T.; Kolar, J.W. Comparison of the chip area usage of 2-level and 3-level voltage source converter topologies. In Proceedings of the IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 391–396. [Google Scholar]
- Karamanakos, P.; Geyer, T. Model Predictive Torque and Flux Control Minimizing Current Distortions. IEEE Trans. Power Electron. 2019, 34, 2007–2012. [Google Scholar] [CrossRef]
- Yan, L.; Wang, F.; Dou, M.; Zhang, Z.; Kennel, R.; Rodríguez, J. Active Disturbance-Rejection-Based Speed Control in Model Predictive Control for Induction Machines. IEEE Trans. Ind. Electron. 2020, 67, 2574–2584. [Google Scholar] [CrossRef]
- Guo, L.; Jin, N.; Gan, C.; Luo, K. Hybrid Voltage Vector Preselection-Based Model Predictive Control for Two-Level Voltage Source Inverters to Reduce the Common-Mode Voltage. IEEE Trans. Ind. Electron. 2020, 67, 4680–4691. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J. Analysis of Finite-Control-Set Model Predictive Current Control with Model Parameter Mismatch in a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2016, 63, 3100–3107. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, L.; Zhang, Y. Model Predictive Current Control for PMSM Drives with Parameter Robustness Improvement. IEEE Trans. Power Electron. 2019, 34, 1645–1657. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, B.; Liu, J. Online Inductance Identification of a PWM Rectifier under Unbalanced and Distorted Grid Voltages. IEEE Trans. Ind. Appl. 2020, 56, 3879–3888. [Google Scholar] [CrossRef]
- Niu, S.; Luo, Y.; Fu, W.; Zhang, X. Robust Model Predictive Control for a Three-Phase PMSM Motor with Improved Control Precision. IEEE Trans. Ind. Electron. 2021, 68, 838–849. [Google Scholar] [CrossRef]
- Yan, L.; Dou, M.; Hua, Z. Disturbance Compensation-Based Model Predictive Flux Control of SPMSM with Optimal Duty Cycle. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 1872–1882. [Google Scholar] [CrossRef]
- Wang, J.; Wang, F.; Wang, G.; Li, S.; Yu, L. Generalized Proportional Integral Observer Based Robust Finite Control Set Predictive Current Control for Induction Motor Systems with Time-Varying Disturbances. IEEE Trans. Ind. Inf. 2018, 14, 4159–4168. [Google Scholar] [CrossRef]
- Zoghdar-Moghadam-Shahrekohne, B.; Pozzi, A.; Raimondo, D.M. SOS-based Stability Region Enlargement of Bilinear Power Converters through Model Predictive Control. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (MED), Bari, Italy, 22–25 June 2021; pp. 847–854. [Google Scholar]
- Zhang, Y.; Jiang, T.; Jiao, J. Model-Free Predictive Current Control of a DFIG Using an Ultra-Local Model for Grid Synchronization and Power Regulation. IEEE Tran. Energy Convers. 2020, 35, 2269–2280. [Google Scholar] [CrossRef]
- Jin, N.; Chen, M.; Guo, L.; Li, Y.; Chen, Y. Double-Vector Model-Free Predictive Control Method for Voltage Source Inverter With Visualization Analysis. IEEE Trans. Ind. Electron. 2022, 69, 10066–10078. [Google Scholar] [CrossRef]
- Rodríguez, J.; Heydari, R.; Rafiee, Z.; Young, H.A.; Flores-Bahamonde, F.; Shahparasti, M. Model-Free Predictive Current Control of a Voltage Source Inverter. IEEE Access 2020, 8, 211104–211114. [Google Scholar] [CrossRef]
- Lin, C.; Liu, T.; Yu, J.; Fu, L.; Hsiao, C. Model-Free Predictive Current Control for Interior Permanent-Magnet Synchronous Motor Drives Based on Current Difference Detection Technique. IEEE Trans. Ind. Electron. 2014, 61, 667–681. [Google Scholar] [CrossRef]
- Lin, C.; Yu, J.; Lai, Y.; Yu, H. Improved Model-Free Predictive Current Control for Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Electron. 2016, 63, 3942–3953. [Google Scholar] [CrossRef]
- da Rù, D.; Polato, M.; Bolognani, S. Model-free predictive current control for a SynRM drive based on an effective update of measured current responses. In Proceedings of the 2017 IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Pilsen, Czech Republic, 4–6 September 2017; pp. 119–124. [Google Scholar]
- Carlet, P.G.; Tinazzi, F.; Bolognani, S.; Zigliotto, M. An Effective Model-Free Predictive Current Control for Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Appl. 2019, 55, 3781–3790. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Li, H.; Yao, X.; Zhang, Z.; de Belie, F. An Improved Model-Free Predictive Current Control with Advanced Current Gradient Updating Mechanism. IEEE Trans. Ind. Electron. 2021, 68, 11968–11979. [Google Scholar] [CrossRef]
- Agustin, C.A.; Yu, J.-T.; Lin, C.-K.; Jai, J.; Lai, Y.-S. Triple-Voltage-Vector Model-Free Predictive Current Control for Four-Switch Three-Phase Inverter-Fed SPMSM Based on Discrete-Space-Vector Modulation. IEEE Access 2021, 9, 60352–60363. [Google Scholar] [CrossRef]
- Agustin, C.A.; Yu, J.-T.; Cheng, Y.-S.; Lin, C.-K.; Huang, H.-Q.; Lai, Y.-S. Model-Free Predictive Current Control for SynRM Drives Based on Optimized Modulation of Triple-Voltage-Vector. IEEE Access 2021, 9, 130472–130483. [Google Scholar] [CrossRef]
- Lin, C.-K.; Yu, J.-T.; Agustin, C.A.; Li, N.-Y. A Two-Staged Optimization Approach to Modulated Model-Free Predictive Current Control for RL-Connected Three-Phase Two-Level Four-Leg Inverters. IEEE Access 2021, 9, 147537–147548. [Google Scholar] [CrossRef]
- Lin, C.-K.; Agustin, C.A.; Yu, J.-T.; Cheng, Y.-S.; Chen, F.-M.; Lai, Y.-S. A Modulated Model-Free Predictive Current Control for Four-Switch Three-Phase Inverter-Fed SynRM Drive Systems. IEEE Access 2021, 9, 162984–162995. [Google Scholar] [CrossRef]
- Agustin, C.A.; Yu, J.-T.; Cheng, Y.-S.; Lin, C.-K.; Yi, Y.-W. A Synchronized Current Difference Updating Technique for Model-Free Predictive Current Control of PMSM Drives. IEEE Access 2021, 9, 63306–63318. [Google Scholar] [CrossRef]
- Yu, F.; Zhou, C.; Liu, X.; Zhu, C. Model-Free Predictive Current Control for Three-Level Inverter-Fed IPMSM With an Improved Current Difference Updating Technique. IEEE Trans. Energy Convers. 2021, 36, 3334–3343. [Google Scholar] [CrossRef]
- Ipoum-Ngome, P.G.; Mon-Nzongo, D.L.; Flesch, R.C.C.; Song-Manguelle, J.; Wang, M.; Jin, T. Model-Free Predictive Current Control for Multilevel Voltage Source Inverters. IEEE Trans. Ind. Electron. 2021, 68, 9984–9997. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Vector | u0 | u1 | u2 | u3 | u4 | u5 | u6 | u7 | u8 | u9 | u10 | u11 | u12 | u13 | u14 | u15 | u16 | u17 | u18 |
| Current Gradient | ∆i0 | ∆i1 | ∆i2 | ∆i3 | ∆i4 | ∆i5 | ∆i6 | ∆i7 | ∆i8 | ∆i9 | ∆i10 | ∆i11 | ∆i12 | ∆i13 | ∆i14 | ∆i15 | ∆i16 | ∆i17 | ∆i18 |
| Parameters | Symbol | Values |
|---|---|---|
| DC-link voltage | udc | 300 V |
| Peak of grid phase voltage | e | 150 V |
| Grid angular frequency | ωg | 314.16 rad/s |
| Control time | Ts | 50 μs |
| Parasitic resistance | R | 0.05 Ω |
| Filter inductance | L0 | 10 mH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Z.; Hu, C.; Luo, K.; Rui, T.; Feng, Z.; Lu, G.; Zhang, P. A Novel Model-Free Predictive Control for T-Type Three-Level Grid-Tied Inverters. Energies 2022, 15, 6557. https://doi.org/10.3390/en15186557
Yin Z, Hu C, Luo K, Rui T, Feng Z, Lu G, Zhang P. A Novel Model-Free Predictive Control for T-Type Three-Level Grid-Tied Inverters. Energies. 2022; 15(18):6557. https://doi.org/10.3390/en15186557
Chicago/Turabian StyleYin, Zheng, Cungang Hu, Kui Luo, Tao Rui, Zhuangzhuang Feng, Geye Lu, and Pinjia Zhang. 2022. "A Novel Model-Free Predictive Control for T-Type Three-Level Grid-Tied Inverters" Energies 15, no. 18: 6557. https://doi.org/10.3390/en15186557
APA StyleYin, Z., Hu, C., Luo, K., Rui, T., Feng, Z., Lu, G., & Zhang, P. (2022). A Novel Model-Free Predictive Control for T-Type Three-Level Grid-Tied Inverters. Energies, 15(18), 6557. https://doi.org/10.3390/en15186557