
Fuzzy Logic–Based Decentralized Voltage–Frequency Control and Inertia Control of a VSG-Based Isolated Microgrid System

Abstract
:1. Introduction
- The development of a fuzzy logic control system that combines VFC with inertial control to regulate the frequency of isolated microgrids that face considerable frequency excursions due to a lack of inertia and reduce the effect of disturbances on the systems.
- The proposed control strategy employs artificial neural networks (ANNs) to estimate the microgrid load exponent that fuzzy-logic-based controllers use to alter the system voltage and the inertia constants of VSGs. This alteration improves isolated microgrids’ frequency response and regulation by sharing load power between VFC and active power control loop according to the sensitivity of the system’s voltage-dependent loads. Conversely, conventional VFC control techniques depend heavily on the system’s load characteristics, limiting their ability to regulate the frequency of the system.
- A genetic algorithm (GA) optimization approach is proposed to properly tune the parameters of the proposed fuzzy logic controllers, considering several performance indices, such as deviations in the system’s frequency and VSG’s DC-link voltage to minimize the impact of disturbances on the system.
2. Overview of VSG and Modeling of Microgrid Components
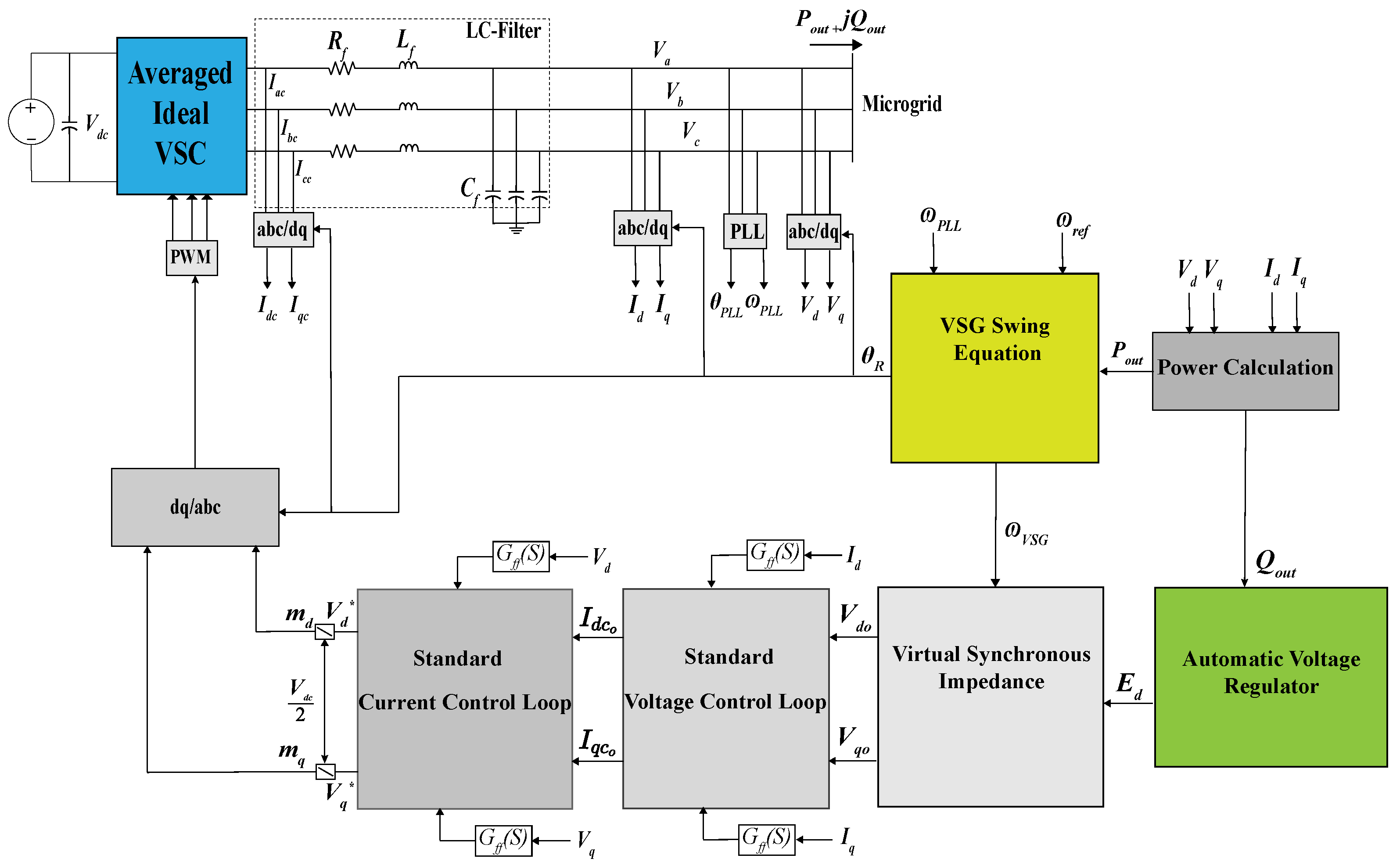
2.1. Virtual Synchronous Generators Modeling
2.2. VSG Swing Equation and Automatic Voltage Regulator
2.3. VSG Voltage Control Loops
2.4. Current Control Loop
2.5. VSG Output Power Calculation Block
2.6. PLL Block*
2.7. Wind Generator Model
2.8. Voltage-Dependent Load Modeling
Load Response to Microgrid Voltage Deviation
3. Proposed Fuzzy-Logic-Based Decentralized Frequency Control Scheme
3.1. Proposed Fuzzy-Logic-Based VFC
3.2. Decentralized Fuzzy-Logic-Based Adaptive Inertia
3.3. Optimization-Based Tuning of the Proposed Fuzzy Logic Controller
4. Simulation Results and Scenarios
4.1. Validation and Comparison
4.2. Impact of Microgrid Load Exponent Changes
4.3. Impact of WGs Output Power and Load Exponent Changes
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| VFC | Voltage–Frequency Control |
| VSC | Voltage Source Converter |
| VSG | Virtual Synchronous Generator |
| SG | Synchronous Generator |
| RES | Renewable Energy Source |
| DER | Distributed Energy Resources |
| GA | Genetic Algorithm |
| ANN | Artificial Neural Network |
References
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Ghafouri, A.; Milimonfared, J.; Gharehpetian, G.B. Coordinated Control of Distributed Energy Resources and Conventional Power Plants for Frequency Control of Power Systems. IEEE Trans. Smart Grid 2015, 6, 104–114. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power System Stabilization Using Virtual Synchronous Generator with Alternating Moment of Inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Jiawei, D.; Jiangbin, Z.; Zihan, M. VSG Inertia and Damping Coefficient Adaptive Control. In Proceedings of the 2020 Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 29–31 May 2020; pp. 431–435. [Google Scholar] [CrossRef]
- Alghamdi, B.; Cañizares, C. Frequency and voltage coordinated control of a grid of AC/DC microgrids. Appl. Energy 2022, 310, 118427. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. A Virtual Synchronous Machine implementation for distributed control of power converters in SmartGrids. Electr. Power Syst. Res. 2015, 122, 180–197. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A. Virtual synchronous machines—Classification of implementations and analysis of equivalence to droop controllers for microgrids. In Proceedings of the 2013 IEEE Grenoble Conference, Grenoble, France, 16–20 June 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Mo, O.; D’Arco, S.; Suul, J.A. Evaluation of Virtual Synchronous Machines With Dynamic or Quasi-Stationary Machine Models. IEEE Trans. Ind. Electron. 2017, 64, 5952–5962. [Google Scholar] [CrossRef] [Green Version]
- Shintai, T.; Miura, Y.; Ise, T. Oscillation Damping of a Distributed Generator Using a Virtual Synchronous Generator. IEEE Trans. Power Deliv. 2014, 29, 668–676. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Bevrani, H.; Ise, T. Enhanced Virtual Synchronous Generator Control for Parallel Inverters in Microgrids. IEEE Trans. Smart Grid 2017, 8, 2268–2277. [Google Scholar] [CrossRef]
- Banjo, Y.; Miura, Y.; Ise, T.; Shintai, T. Enhanced stand-alone operating characteristics of an engine generator interconnected through the inverter using virtual synchronous generator control. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 1003–1010. [Google Scholar] [CrossRef]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: A survey and new perspectives. Int. J. Electr. Power Energy Syst. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- Sakimoto, K.; Miura, Y.; Ise, T. Stabilization of a power system with a distributed generator by a Virtual Synchronous Generator function. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 1498–1505. [Google Scholar] [CrossRef]
- Bevrani, H. Microgrid Dynamics and Control; John Wiley & Sons, Inc: Hoboken, NJ, USA, 2017. [Google Scholar]
- Farrokhabadi, M.; Cañizares, C.A.; Bhattacharya, K. Frequency Control in Isolated/Islanded Microgrids through Voltage Regulation. IEEE Trans. Smart Grid 2017, 8, 1185–1194. [Google Scholar] [CrossRef]
- Farrokhabadi, M.; Cañizares, C.; Bhattacharya, K. A voltage-based frequency controller for inverter-based systems in microgrids. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Farrokhabadi, M.; Simpson-Porco, J.W.; Cañizares, C.A. Optimal Design of Voltage-Frequency Controllers for Microgrids. In Proceedings of the 2021 IEEE Madrid PowerTech, Madrid, Spain, 27 June–2 July 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Alghamdi, B.; Cañizares, C.A. Frequency Regulation in Isolated Microgrids through Optimal Droop Gain and Voltage Control. IEEE Trans. Smart Grid 2021, 12, 988–998. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. Small-signal modelling and parametric sensitivity of a Virtual Synchronous Machine. In Proceedings of the 2014 Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014; pp. 1–9. [Google Scholar]
- Yazdani, A. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; IEEE Press: Piscataway, NJ, USA; John Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Farrokhabadi, M.; König, S.; Cañizares, C.A.; Bhattacharya, K.; Leibfried, T. Battery Energy Storage System Models for Microgrid Stability Analysis and Dynamic Simulation. IEEE Trans. Power Syst. 2018, 33, 2301–2312. [Google Scholar] [CrossRef]
- Ouammi, A.; Dagdougui, H.; Sacile, R. Optimal Control of Power Flows and Energy Local Storages in a Network of Microgrids Modeled as a System of Systems. IEEE Trans. Control Syst. Technol. 2015, 23, 128–138. [Google Scholar] [CrossRef]
- Mondal, D.; Chakrabarti, A.; Sengupta, A. Power System Small Signal Stability Analysis and Control; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Abdel-Magid, Y.; Dawoud, M. Tuning of power system stabilizers using genetic algorithms. Electr. Power Syst. Res. 1996, 39, 137–143. [Google Scholar] [CrossRef]
- Solanki, B.V.; Bhattacharya, K.; Cañizares, C.A. A Sustainable Energy Management System for Isolated Microgrids. IEEE Trans. Sustain. Energy 2017, 8, 1507–1517. [Google Scholar] [CrossRef]
- Solanki, B.V.; Cañizares, C.A.; Bhattacharya, K. Practical Energy Management Systems for Isolated Microgrids. IEEE Trans. Smart Grid 2019, 10, 4762–4775. [Google Scholar] [CrossRef]
- Arriaga, M.; Cañizares, C.A. Overview and Analysis of Data for Microgrid at Kasabonika Lake First Nation (KLFN); Technical Report, Hatch Project; University of Waterloo: Waterloo, ON, Canada, 2015. [Google Scholar]
- Distributed Generation Technical Interconnection Requirements: Interconnections at Voltages 50 kV and Below; Technical Report DT-10-015 R3; Hydro One Networks Inc.: Toronto, ON, Canada, 2013.









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Input Layer Neurons | Hidden Layer Neurons | Output Layer Neurons |
|---|---|---|---|
| No. of neurons | 2 | 6 | 1 |
| Activation function | Log-sigmoid | Tan-sigmoid | Pure linear |
| Training algorithm | Levenberg-Marquardt Algorithm | ||
| No. of epochs | 1000 | ||
| GA Optimization Parameters | Percentage of Population to Be Deviated | |
|---|---|---|
| Pairing method | Tournament | 0.1% |
| Initial population size | 200 | |
| Maximum deviation rate | 10 | |
| Mutation rate | 5 | |
| Maximum No. of iterations | 1000 | |
| 3 | 2 | 1 | 3 |
| Parameter | Value |
|---|---|
| 1.7 MVA | |
| 12.45 kV | |
| 2.5 kVdc | |
| H | 4.31 s |
| 0.0001 s2 | |
| 1 s | |
| 376.992 rad/s | |
| AVR PI controller | 5 |
| AVR PI controller | 10 |
| Voltage loop PI controller | 6 |
| Voltage loop PI controller | 7.6923 |
| Current loop PI controller | 3 |
| Current loop PI controller | 15 |
| DC voltage loop PI controller | 20 |
| DC voltage loop PI controller | 10 |
| 1.65 mH | |
| 20 mΩ | |
| 220 μF |
| INPUT 1 | INPUT 2 | INPUT 3 | OUTPUT |
|---|---|---|---|
| L | L | L | MF1 |
| L | L | M | MF2 |
| L | L | H | MF3 |
| L | M | L | MF4 |
| L | M | M | MF5 |
| L | M | H | MF6 |
| L | H | L | MF7 |
| L | H | M | MF8 |
| L | H | H | MF9 |
| M | L | L | MF10 |
| M | L | M | MF11 |
| M | L | H | MF12 |
| M | M | L | MF13 |
| M | M | M | MF14 |
| M | M | H | MF15 |
| M | H | L | MF16 |
| M | H | M | MF17 |
| M | H | H | MF18 |
| H | L | L | MF19 |
| H | L | M | MF20 |
| H | L | H | MF21 |
| H | M | L | MF22 |
| H | M | M | MF23 |
| H | M | H | MF24 |
| H | H | L | MF25 |
| H | H | M | MF26 |
| H | H | H | MF27 |
| INPUT 1 | INPUT 2 | OUTPUT |
|---|---|---|
| L | L | MF1 |
| L | M | MF2 |
| L | H | MF3 |
| M | L | MF4 |
| M | M | MF5 |
| M | H | MF6 |
| H | L | MF7 |
| H | M | MF8 |
| H | H | MF9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alghamdi, B. Fuzzy Logic–Based Decentralized Voltage–Frequency Control and Inertia Control of a VSG-Based Isolated Microgrid System. Energies 2022, 15, 8401. https://doi.org/10.3390/en15228401
Alghamdi B. Fuzzy Logic–Based Decentralized Voltage–Frequency Control and Inertia Control of a VSG-Based Isolated Microgrid System. Energies. 2022; 15(22):8401. https://doi.org/10.3390/en15228401
Chicago/Turabian StyleAlghamdi, Baheej. 2022. "Fuzzy Logic–Based Decentralized Voltage–Frequency Control and Inertia Control of a VSG-Based Isolated Microgrid System" Energies 15, no. 22: 8401. https://doi.org/10.3390/en15228401