
Aerodynamic Analysis of a Low-Speed Tandem-Channel Wing for eVTOL Aircraft Considering Propeller–Wing Interaction



Abstract
:1. Introduction
2. Numerical Simulation Approaches
2.1. Governing Equations
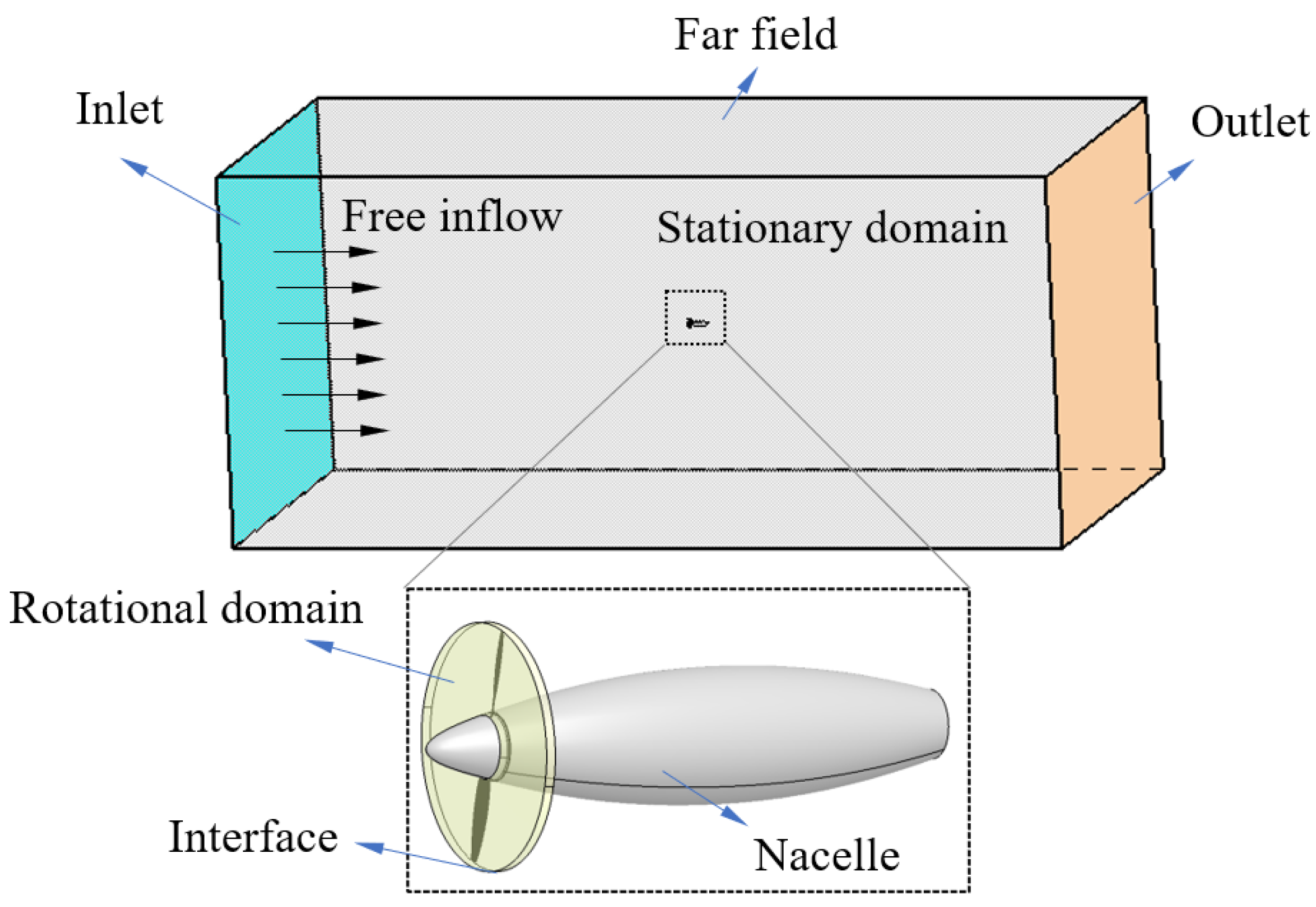
2.2. The Multiple Reference Frame Method and Boundary Condition
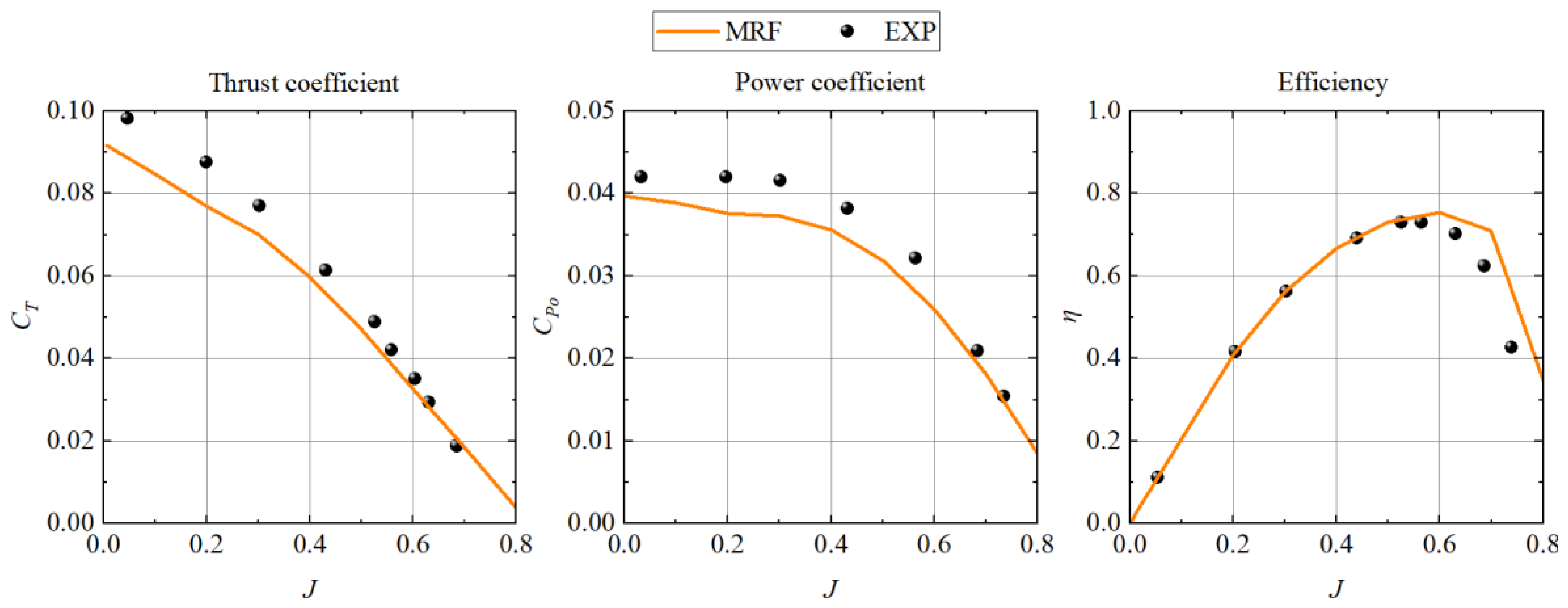
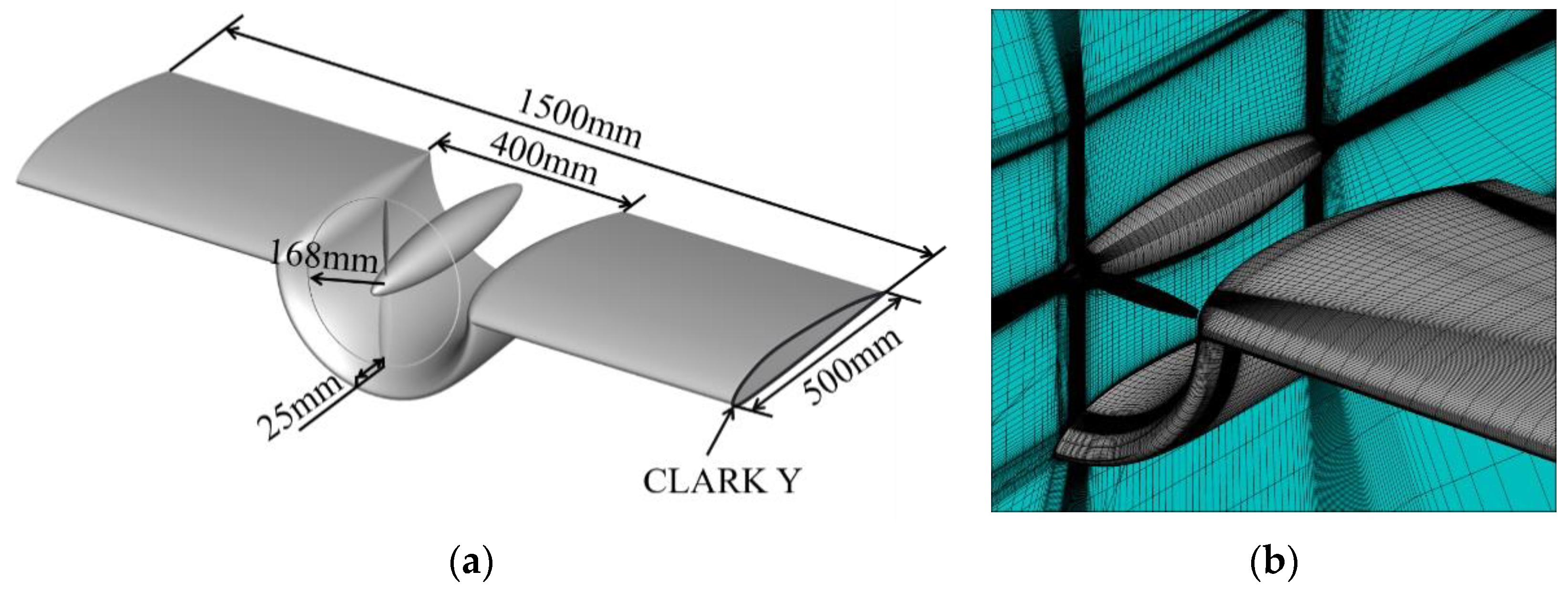
2.3. Methodology Validation
3. Results and Discussion
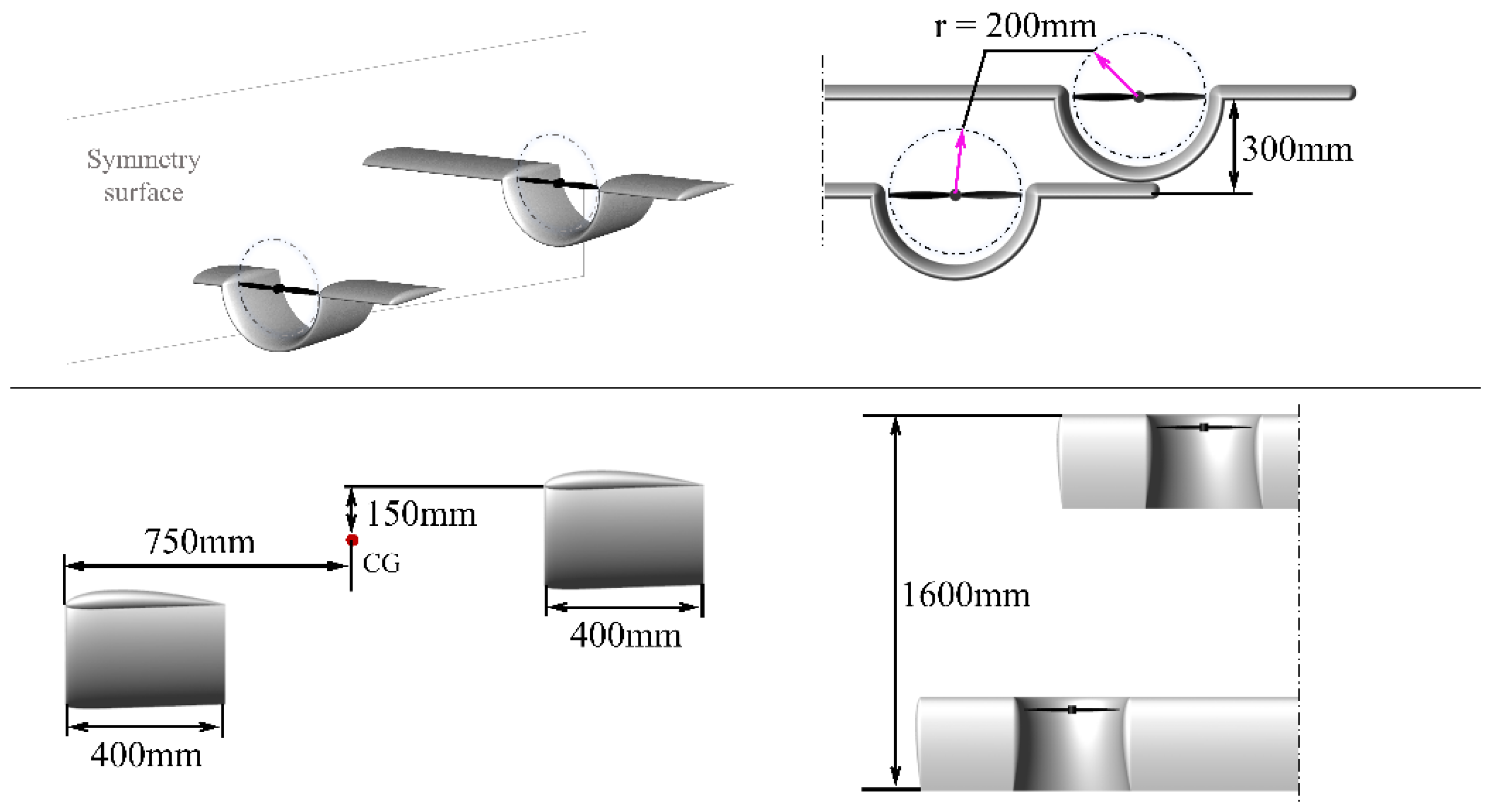
3.1. Tandem-Channel Wing Layout
3.2. Aerodynamic Characteristics of the FLR Configuration
3.3. Aerodynamic Characteristics of the FUR Configuration
4. Conclusions
- 1.
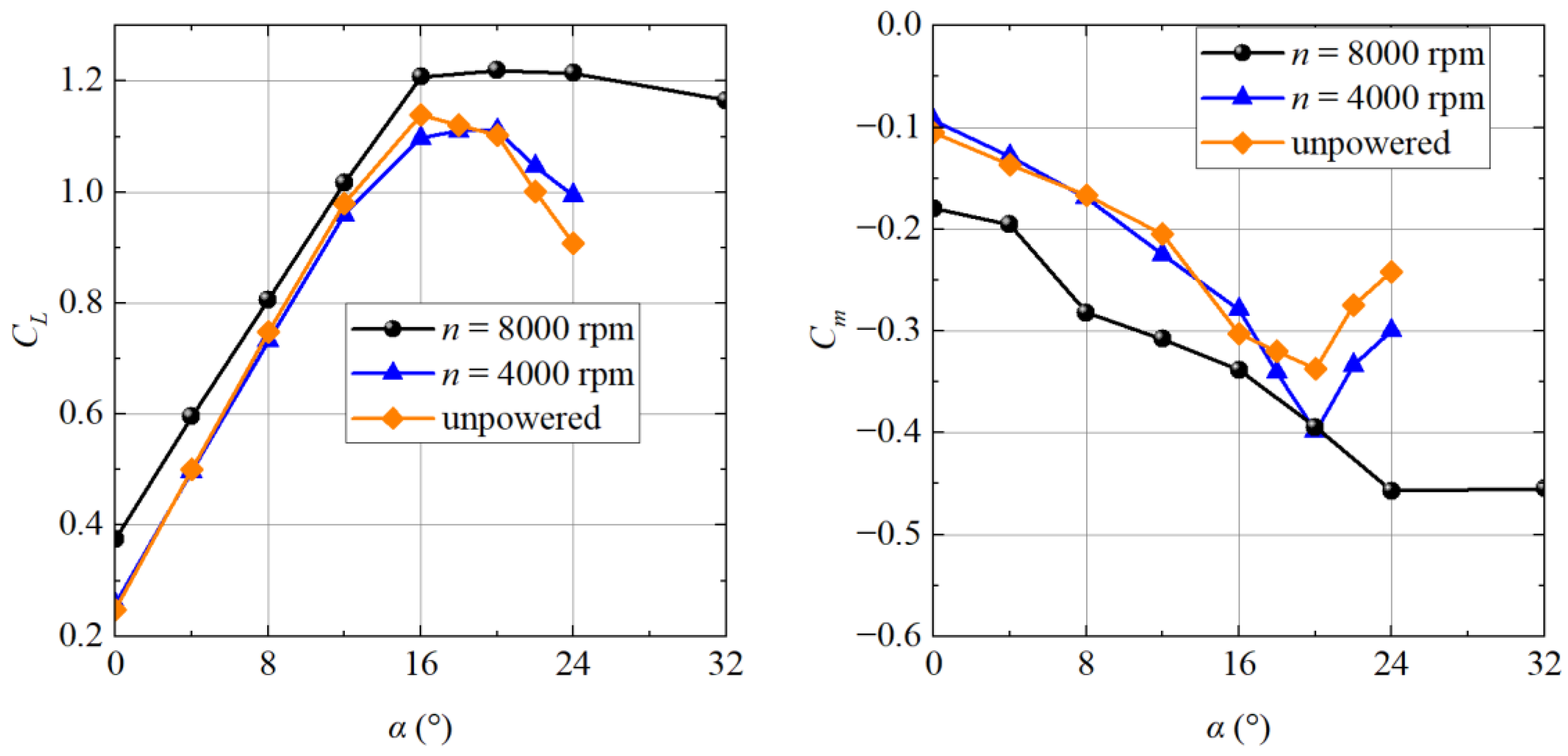
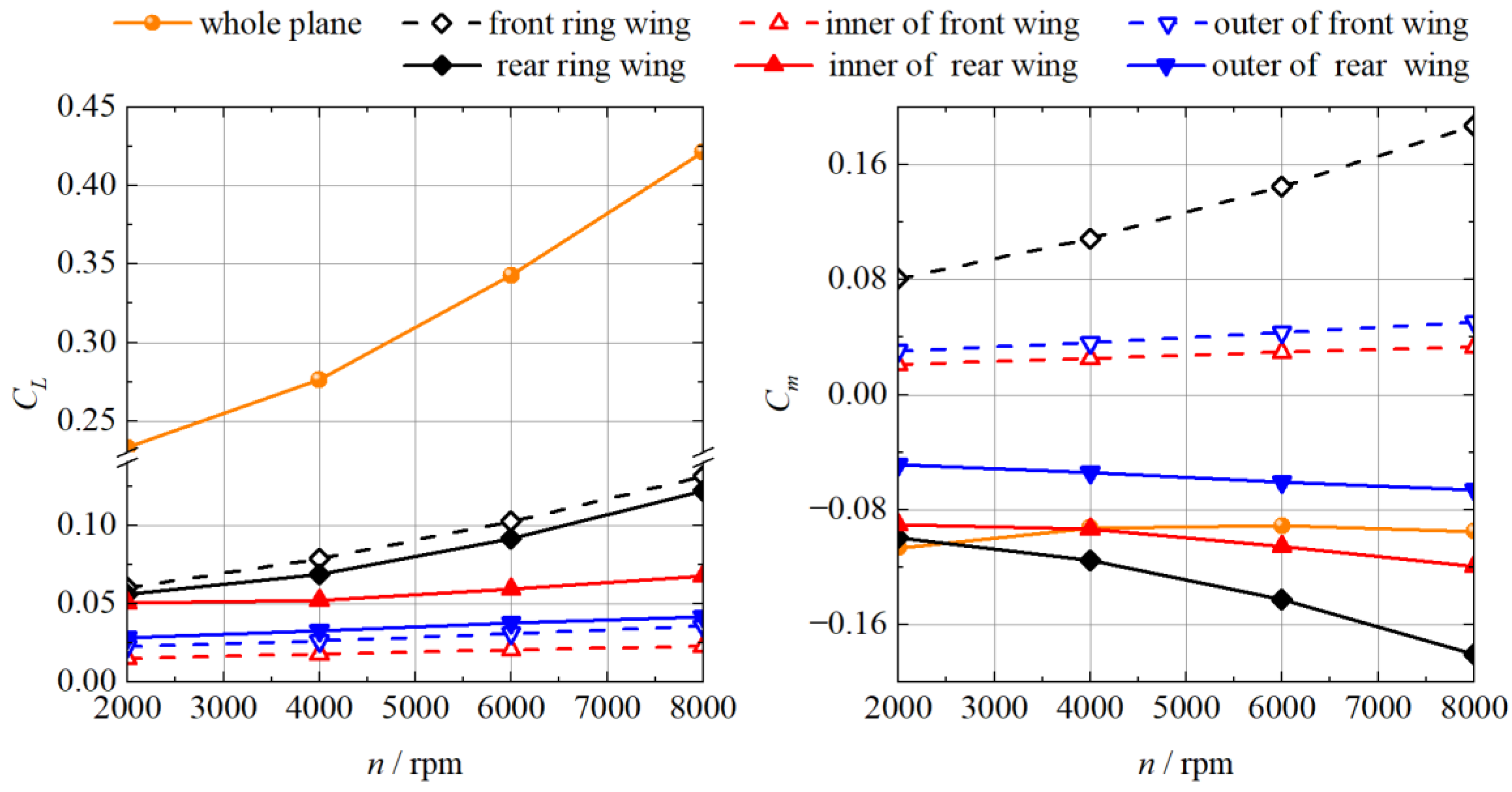
- At a high propeller rotational speed, the tandem-channel wing configuration lift greatly increases. At a 0° angle of attack, the lift rises by more than 50 percent. At a stall angle of attack, the lift increases by approximately 10 percent; and at a maximum angle of attack for stalling, the lift increases by more than 10 degrees.
- 2.
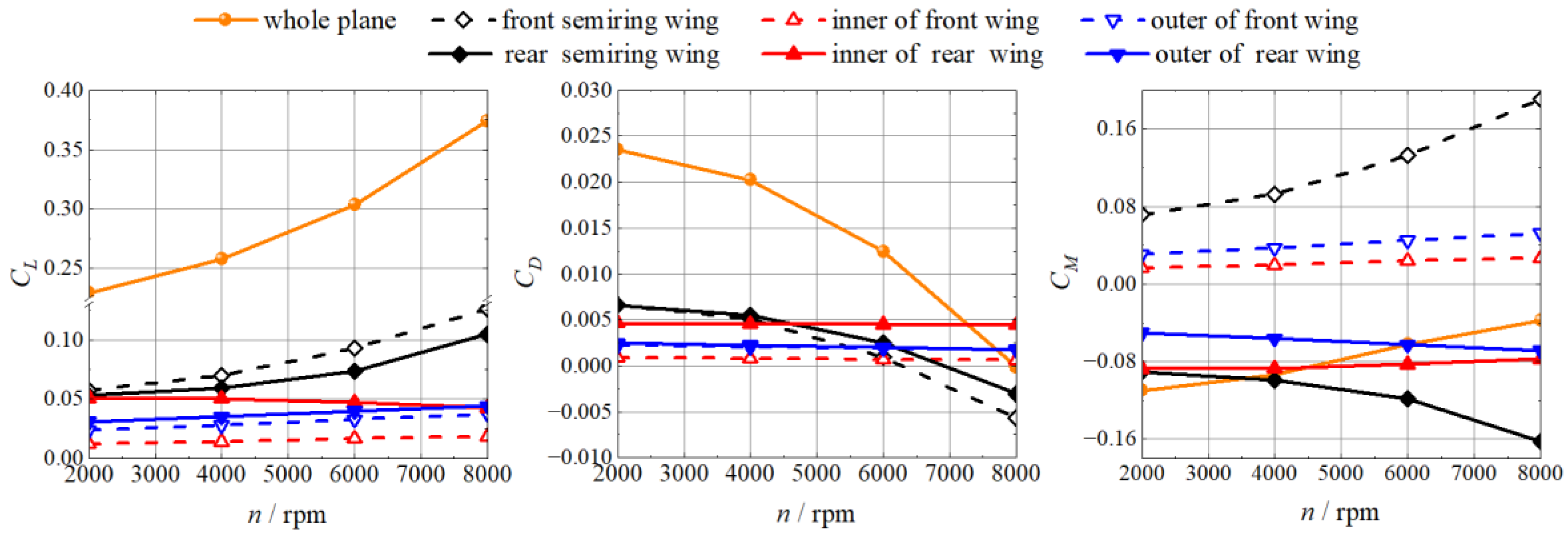
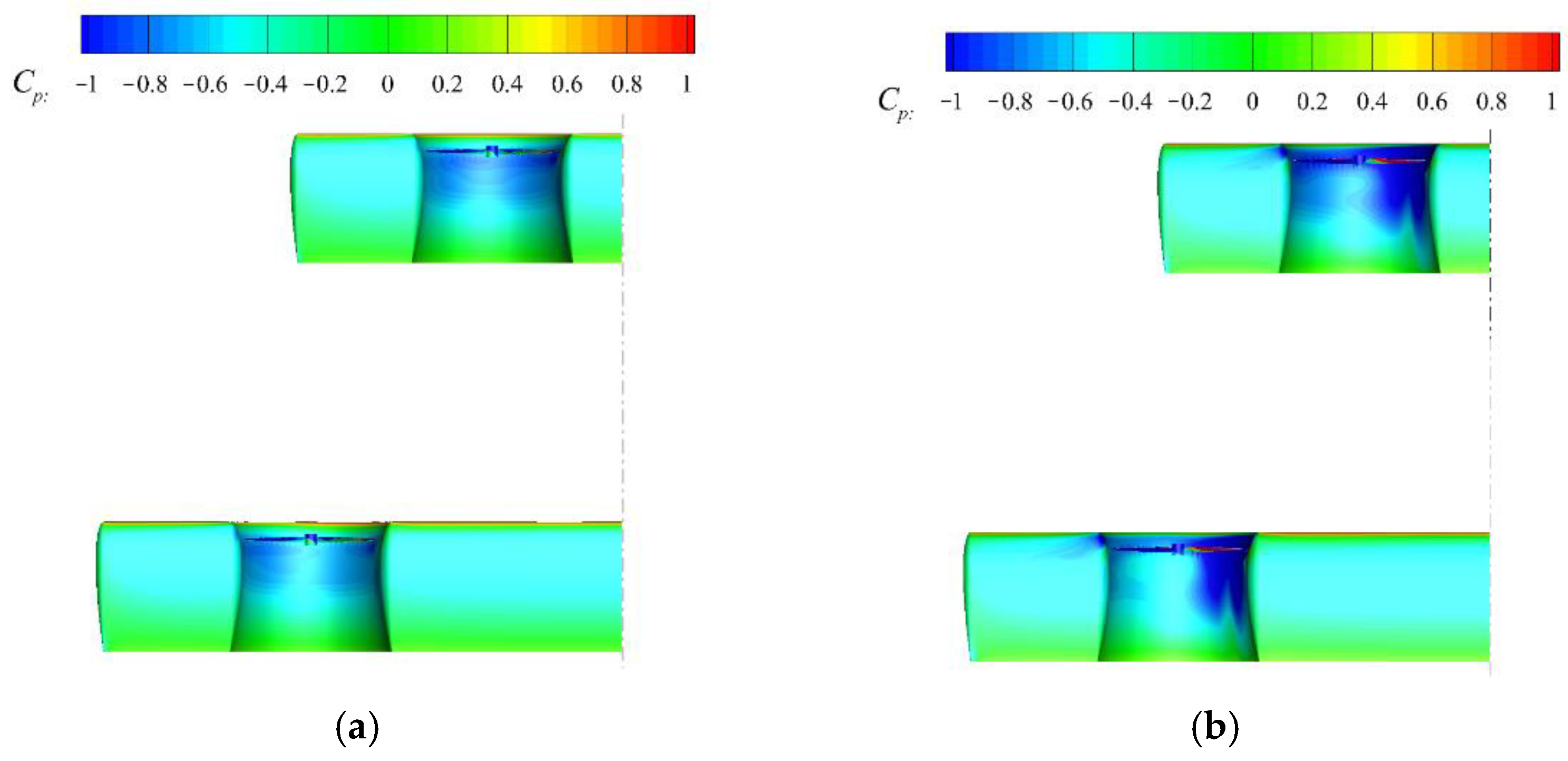
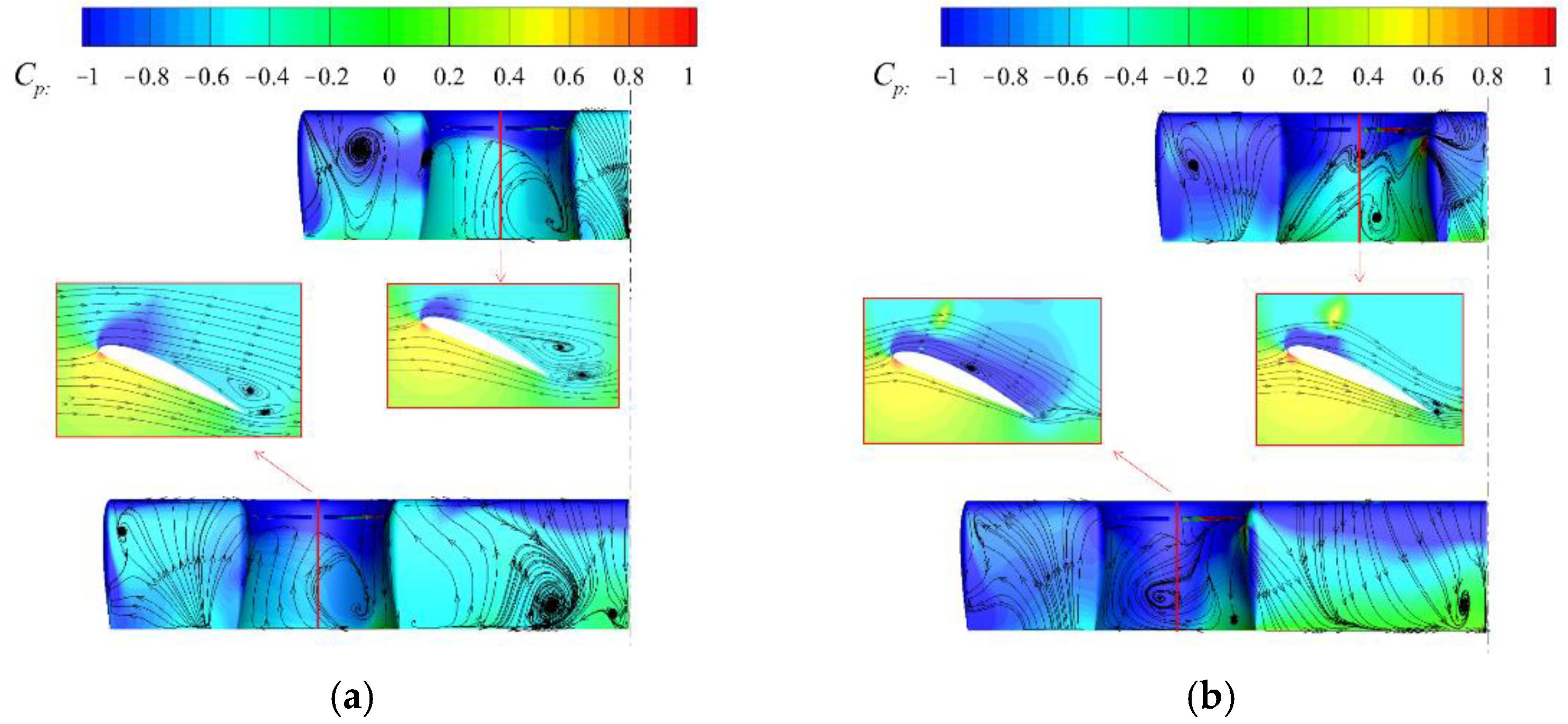
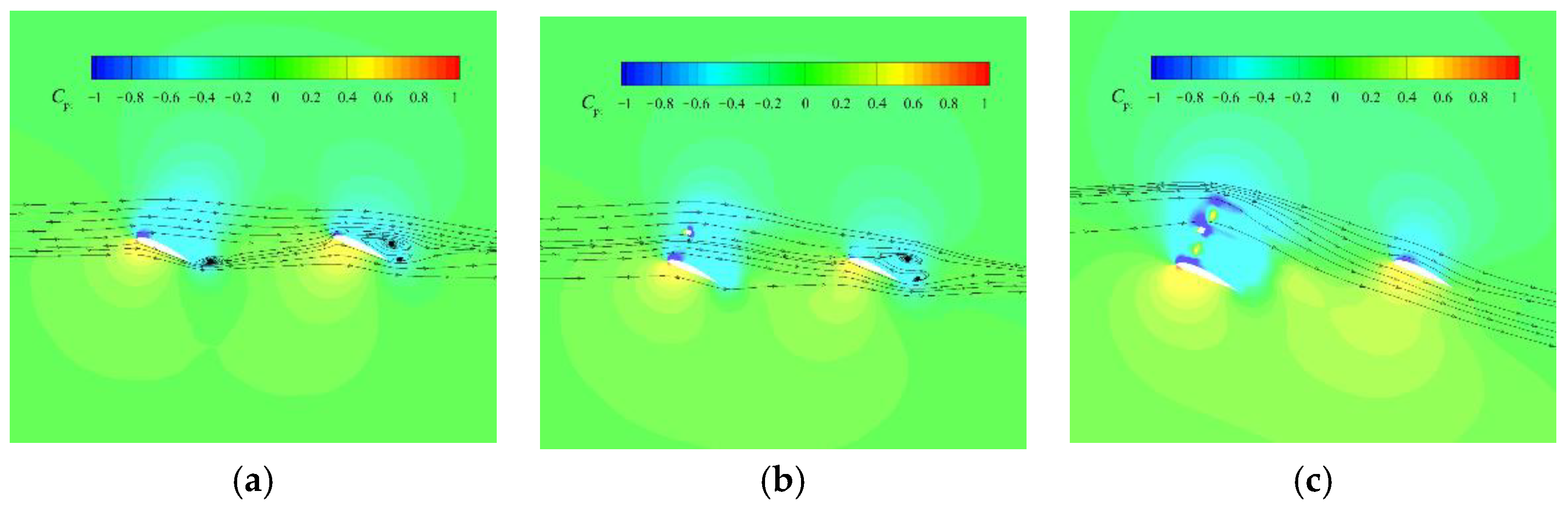
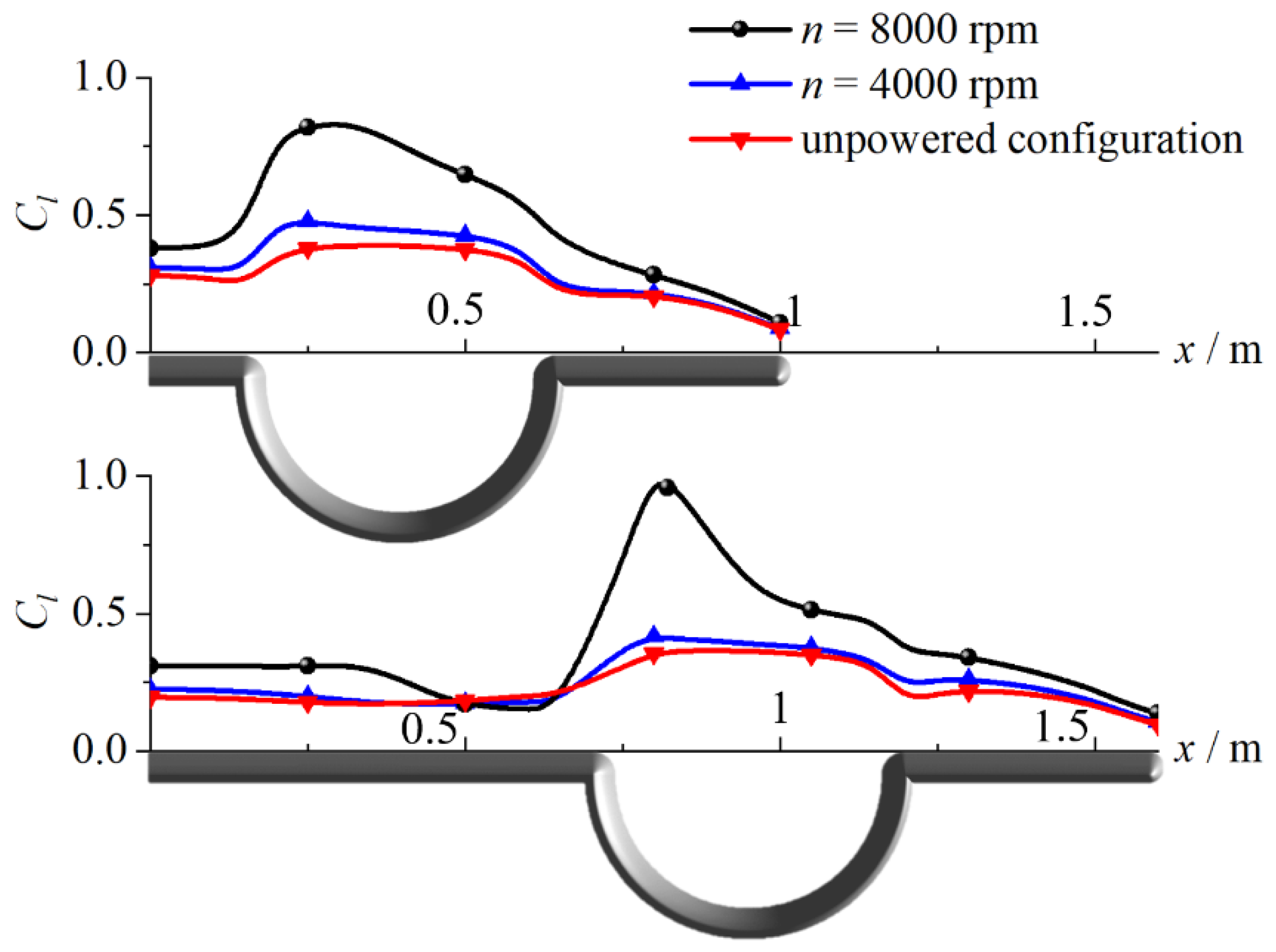
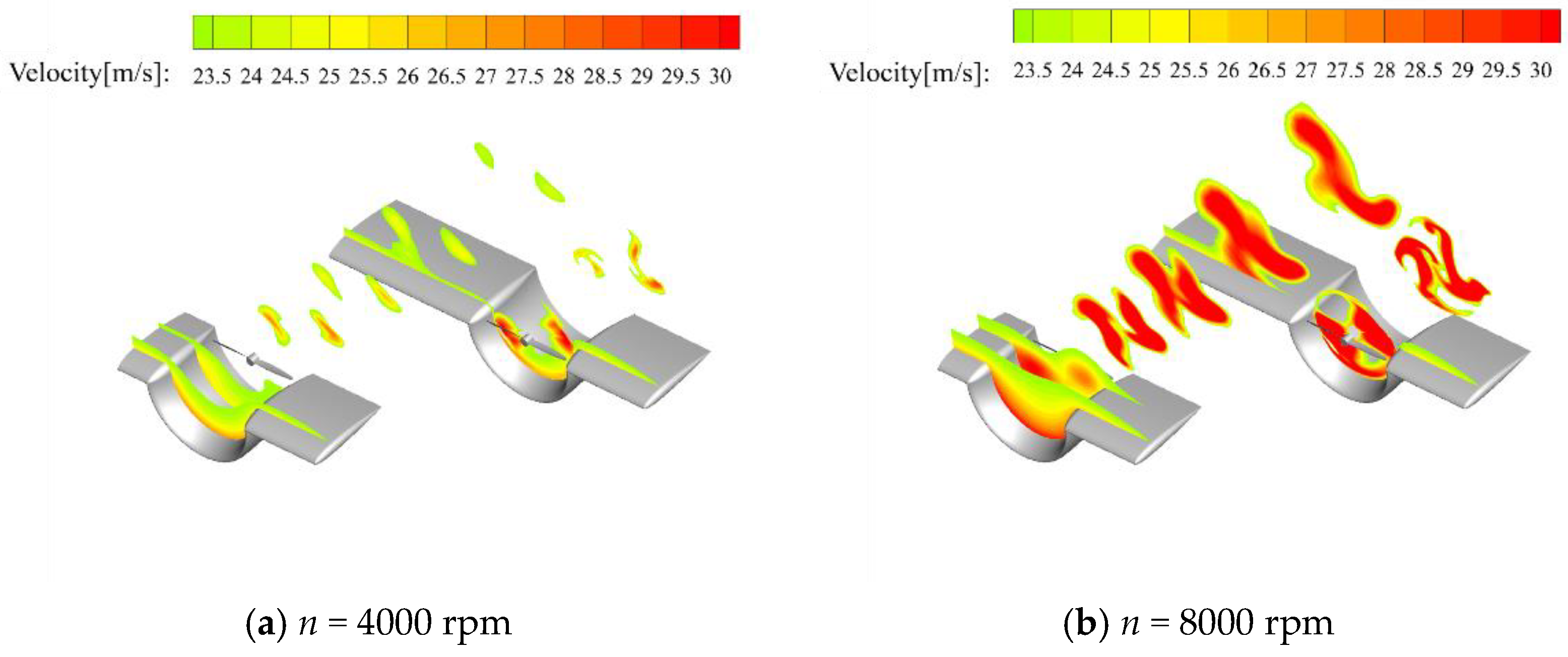
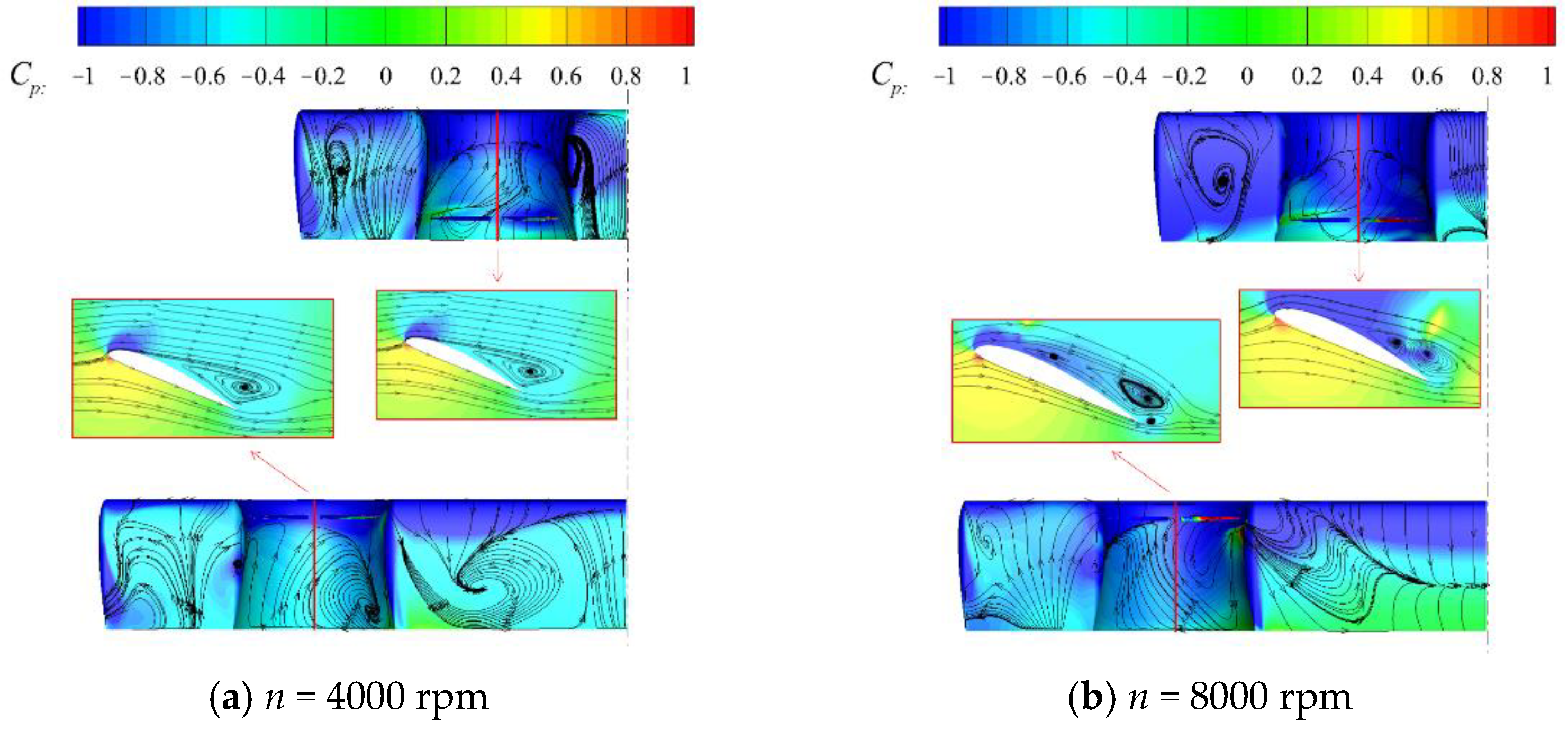
- The tandem-channel wing’s increased lift is caused by the propeller’s acceleration of the air flow on the top surface of the semiring wing, which enlarges the region of low pressure on the upper surface. Simultaneously, the propeller also generates a small increase in lift on the neighboring straight wing section to the ring wing. The rear propeller is more effective than the front propeller in inducing lift rise.
- 3.
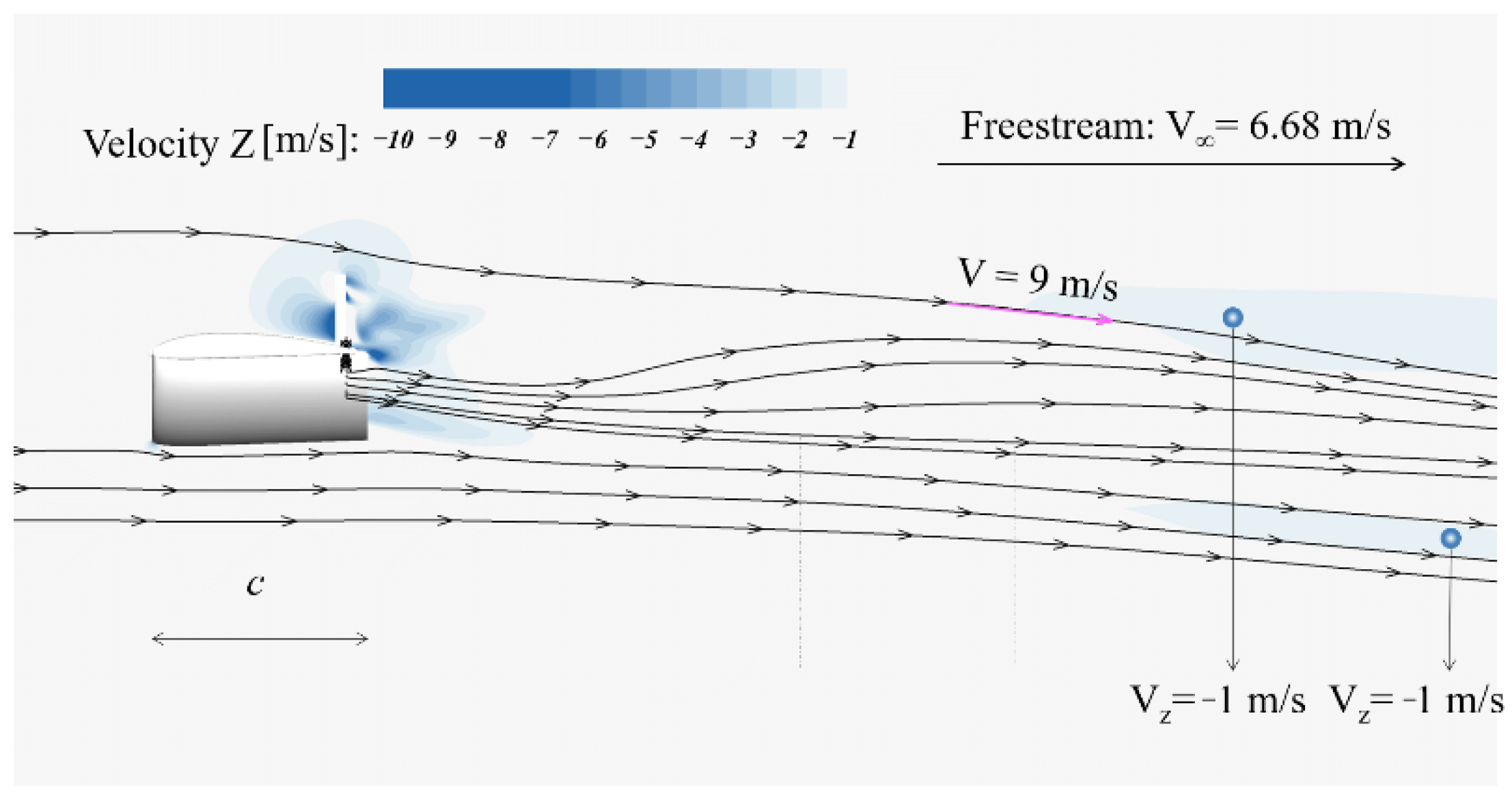
- Under the FLR configuration, the rear wing is impacted by the downwash effect of the front wing, which decreases the local angle of attack and delays airflow separation on the top surface. In the FUR configuration, the rear wing top surface is induced by the wake flow of the front wing propeller at a high speed, which increases the lift force, the total lift force, and the stall angle of attack; however, the aircraft tends to be statically unstable at this moment.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Holden, J.; Goel, N. Fast-Forwarding to a Future of On-Demand Urban Air Transportation; Uber Elevate: San Francisco, CA, USA, 2016. [Google Scholar]
- Thipphavong, P.; Apaza, R.; Barmore, B.; Battiste, V.; Burian, B.; Dao, Q.; Feary, M.; Go, S.; Goodrich, K.H.; Homola, J.; et al. Urban air mobility airspace integration concepts and considerations. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; AIAA: Reston, VA, USA, 2018; pp. 3676–3681. [Google Scholar]
- Balakrishnan, K.; Polastre, J.; Mooberry, J.; Golding, R.; Sachs, P. Blueprint for the Sky. The Roadmap for the Safe Integration of Autonomous Aircraft; Airbus A3: Santa Clara Valley, NC, USA, 2018. [Google Scholar]
- Embraer, X. Flight Plan 2030: An Air Traffic Management Concept for Urban Air Mobility; Duskamp; EmbraerX: Sao Jose Dos Campos, Brazil, 2019. [Google Scholar]
- Lascara, B.; Spencer, T.; DeGarmo, M.; Lacher, A.; Maroney, D.; Guterres, M. Urban Air Mobility Landscape Report; MITRE: McLean, VA, USA, 2018. [Google Scholar]
- Xu, H.X. The Future of Transportation: White Paper on Urban Air Mobility Systems; EHang: Guangzhou, China, 2020. [Google Scholar]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-enabled intelligent transportation systems for the smart city: Applications and challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Gokce, Z.O.; Camci, C. Channel wing as a potential VTOL/STOL aero-vehicle concept. Recent Pat. Mech. Eng. 2010, 3, 18–31. [Google Scholar]
- Pasamanick, J. Langley Full-Scale-Tunnel Tests of the Custer Channel Wing Airplane; National Advisory Committee for Aeronautics: Washington, DC, USA, 1953.
- Edgington, W. A Lifting Line Analysis of Nonplanar Wings (Numerical Relationship of Spanwise Circulation Distribution to Induced Velocity at Specific Spanwise Station). Ph.D. Thesis, Xerox University Microfilms, Ann Arbor, MI, USA, 1973. [Google Scholar]
- Nangia, R.; Palmer, M. “Channel” and “arc” wing aerodynamics with propeller effects for STOL application. In Proceedings of the 39th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2001. [Google Scholar]
- Englar, R.J.; Campbell, B.A. Development of pneumatic channel wing powered-lift advanced superSTOL aircraft. In Proceedings of the 1st Flow Control Conference, St. Louis, MO, USA, 24–26 June 2002; p. 3275. [Google Scholar]
- Englar, R.J.; Campbell, B.A. Experimental development and evaluation of pneumatic powered-lift super-STOL aircraft. In Proceedings of the 2004 NASA/ONR Circulation Control Workshop, Part 1; NASA: Hampton, VA, USA, 2005. [Google Scholar]
- Müller, L.; Kozulovic, D.; Hepperle, M.; Radespiel, R. Installation Effects of a Propeller Over a Wing with Internally Blown Flap. In Proceedings of the 30th AIAA Applied Aerodynamics Conference, New Orleans, LA, USA, 25–28 June 2012; p. 3335. [Google Scholar]
- Müller, L.; Kozulovic, D.; Hepperle, M.; Radespiel, R. The Influence of the propeller position on the aerodynamics of a channel wing. AIAA J. 2012, 38, 784–792. [Google Scholar]
- Müller, L.; Heinze, W.; Kožulović, D.; Hepperle, M.; Radespiel, R. Aerodynamic installation effects of an over-the-wing propeller on a high-lift configuration. J. Aircr. 2014, 51, 249–258. [Google Scholar] [CrossRef]
- Keane, P.; Keane, A.J. Use of Custer Channel Wings–Wing Ducts on Small UAVs. J. Aerosp. Eng. 2016, 29, 04015059. [Google Scholar] [CrossRef]
- Shafie, M.A.M.; Hamid, M.F.A.; Rafie, A.S.M. Circulation Control Aircraft Design: Assessment on the Channel-Wing Lift-Thrust Performance Characteristics. J. Adv. Res. Fluid Mech. Therm. Sci. 2019, 64, 143–151. [Google Scholar]
- Cravero, C.; Marsano, D. Computational Investigation of the Aerodynamics of a Wheel Installed on a Race Car with a Multi-Element Front Wing. Fluids 2022, 7, 182. [Google Scholar] [CrossRef]
- Fernandez-Gamiz, U.; Gomez-Mármol, M.; Chacón-Rebollo, T. Computational Modeling of Gurney Flaps and Microtabs by POD Method. Energies 2018, 11, 2091. [Google Scholar] [CrossRef] [Green Version]
- Basso, M.; Cravero, C.; Marsano, D. Aerodynamic Effect of the Gurney Flap on the Front Wing of a F1 Car and Flow Interactions with Car Components. Energies 2021, 14, 2059. [Google Scholar] [CrossRef]
- Menter, F.R. Two-Equation Eddy-Viscosity Turbulence Models for Engineering Applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Luo, J.; Gosman, A. Prediction of Impeller-Induced Flow in Mixing Vessels Using Multiple Frames of Reference. Inst. Chem. Eng. Symp. Ser. 1994, 136, 549–556. [Google Scholar]
- Ghoddoussi, A.; Miller, L.S. A More Comprehensive Database for Low Reynolds Number Propeller Performance Validations; American Institute of Aeronautics and Astronautics, Inc.: Washington, DC, USA, 2016; p. 3422. [Google Scholar]
- Droandi, G.; Syal, M.; Bower, G. Tiltwing Multi-Rotor Aerodynamic Modeling in Hover, Transition and Cruise Flight Conditions. In Proceedings of the 74th Annual Forum, Phoenix, AZ, USA, 14–17 May 2018. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | Δy1 | y1+ | Grid Cells |
|---|---|---|---|
| A | 3 × 10−6 | 1 | 1,000,000 |
| B | 1 × 10−6 | 0.4 | 4,000,000 |
| C | 3 × 10−7 | 0.11 | 32,000,000 |
| Parameter | FLR Configuration | FUR Configuration |
|---|---|---|
| Span of front wing | 2000 mm | 2000 mm |
| Span of rear wing | 3200 mm | 3200 mm |
| Radius of propeller | 200 mm | 200 mm |
| Distance along chordwise | 1600 mm | 1600 mm |
| Distance along vertical | −300 mm | 300 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, M.; Zheng, Z.; Meng, X.; Bai, J.; Wang, B. Aerodynamic Analysis of a Low-Speed Tandem-Channel Wing for eVTOL Aircraft Considering Propeller–Wing Interaction. Energies 2022, 15, 8616. https://doi.org/10.3390/en15228616
Chang M, Zheng Z, Meng X, Bai J, Wang B. Aerodynamic Analysis of a Low-Speed Tandem-Channel Wing for eVTOL Aircraft Considering Propeller–Wing Interaction. Energies. 2022; 15(22):8616. https://doi.org/10.3390/en15228616
Chicago/Turabian StyleChang, Min, Zhongyuan Zheng, Xiaoxuan Meng, Junqiang Bai, and Bo Wang. 2022. "Aerodynamic Analysis of a Low-Speed Tandem-Channel Wing for eVTOL Aircraft Considering Propeller–Wing Interaction" Energies 15, no. 22: 8616. https://doi.org/10.3390/en15228616