
Research on Size Optimization of Wave Energy Converters Based on a Floating Wind-Wave Combined Power Generation Platform

Abstract
:1. Introduction
2. Mathematical Model
2.1. Frequency-Domain Model
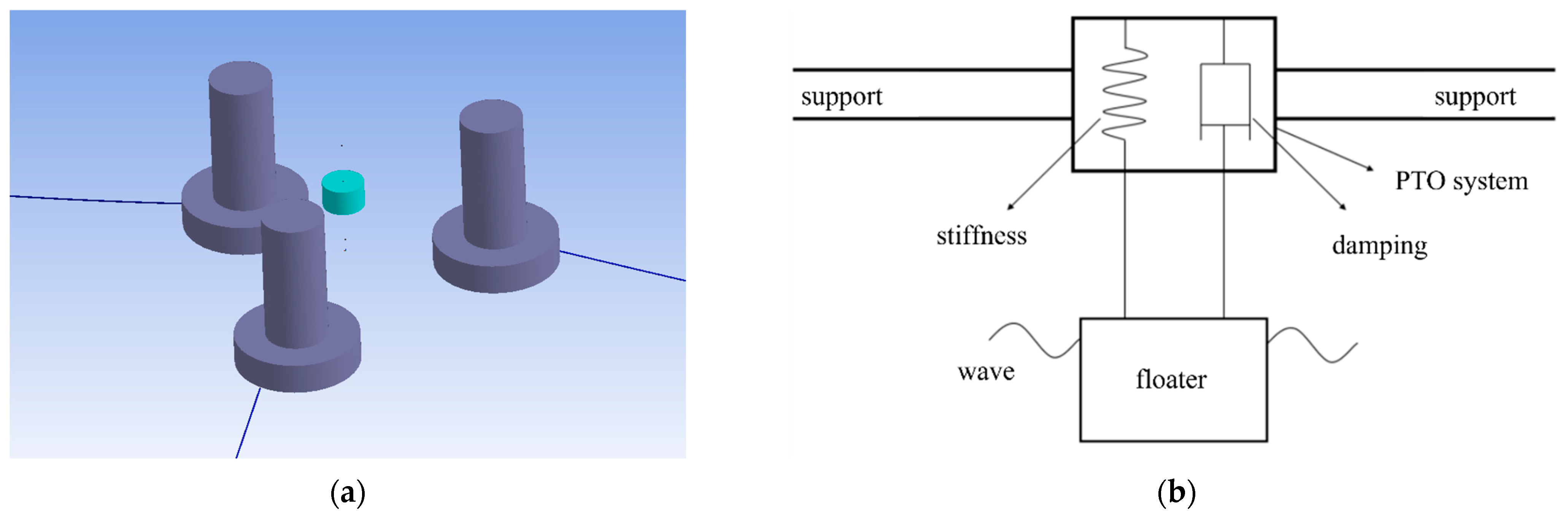
2.2. Time-Domain Model
3. Hydrodynamic Analysis in Frequency-Domain
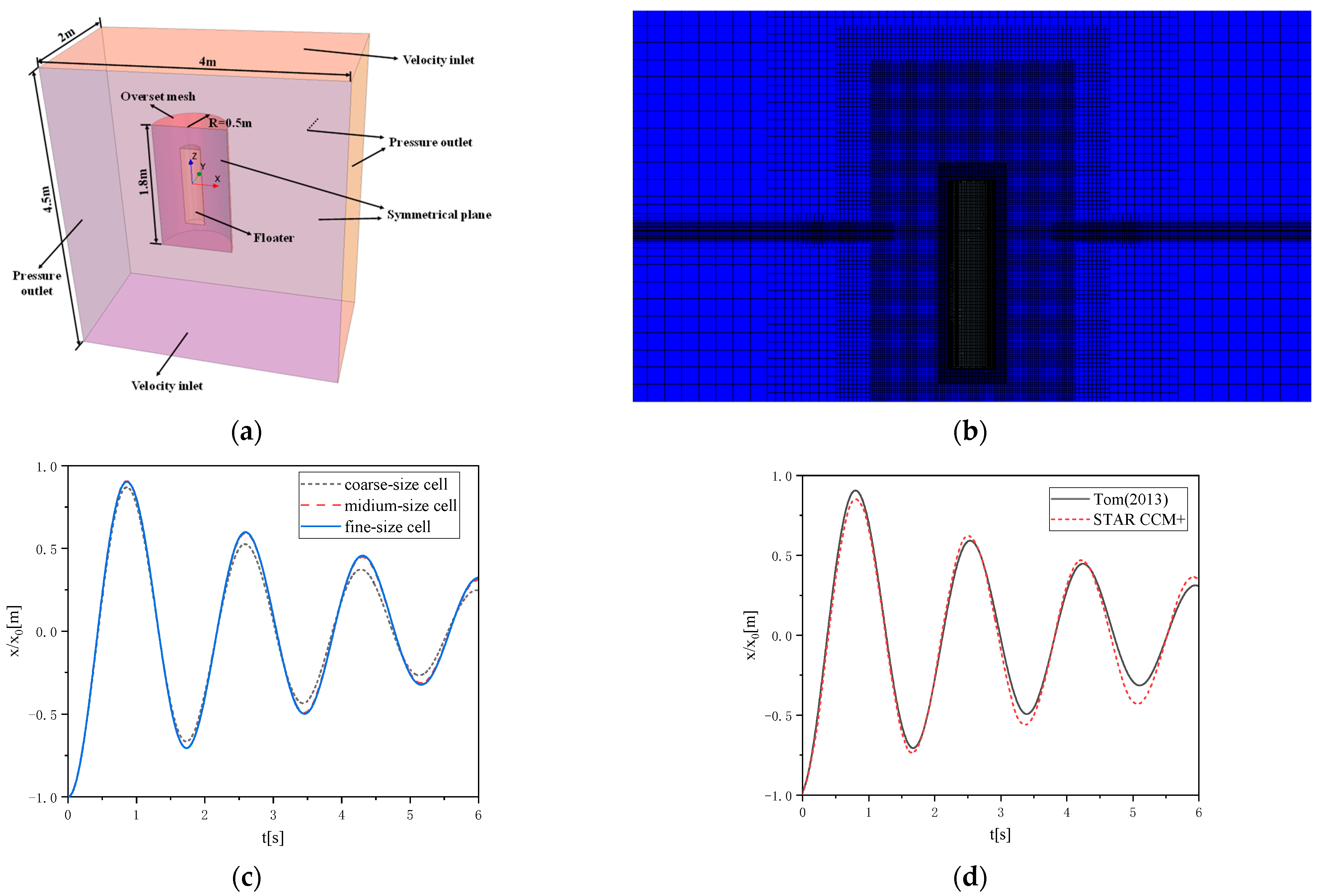
3.1. Viscosity Correction for Hydrodynamic Calculation
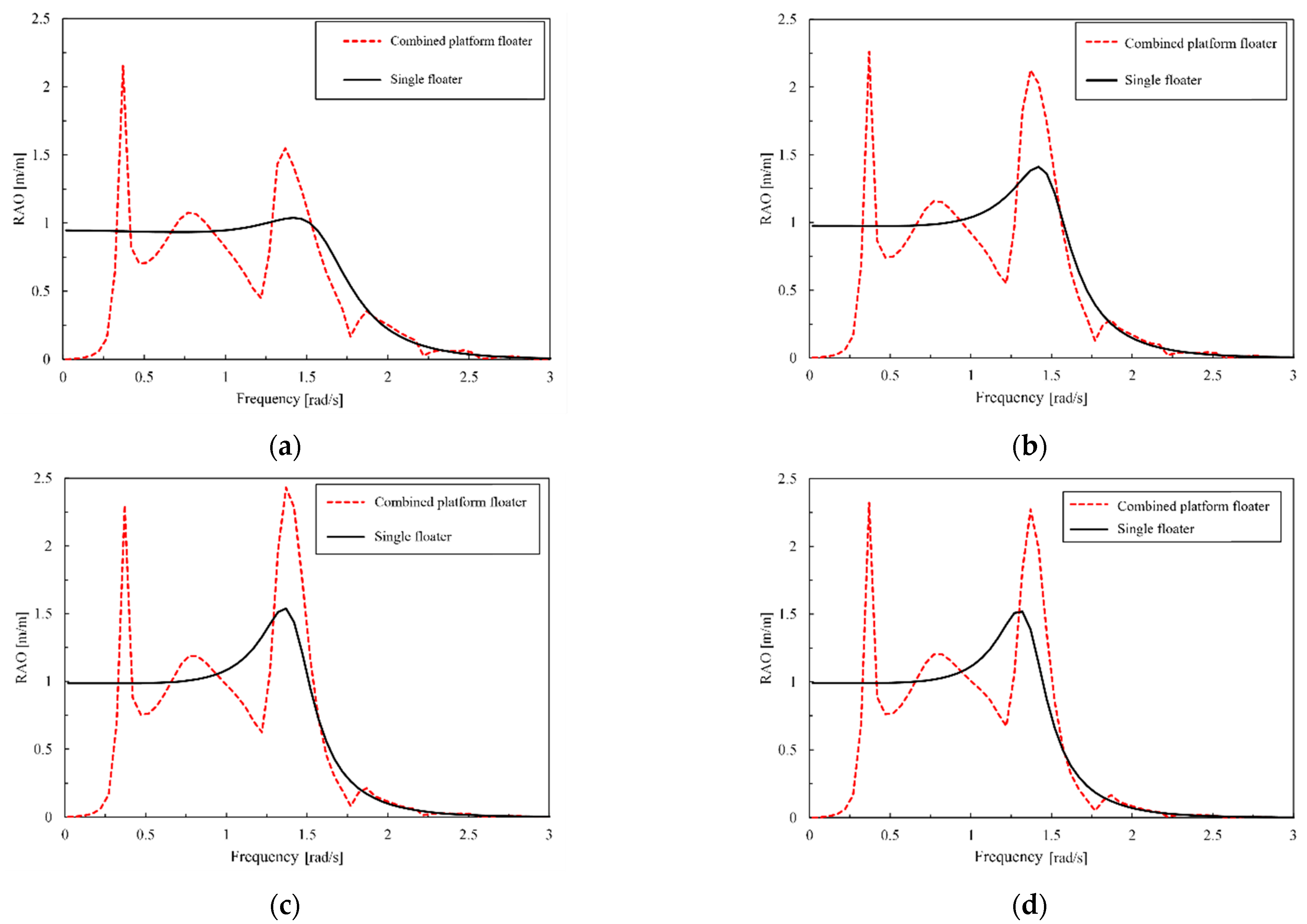
3.2. Floater RAO in Free-Floating State
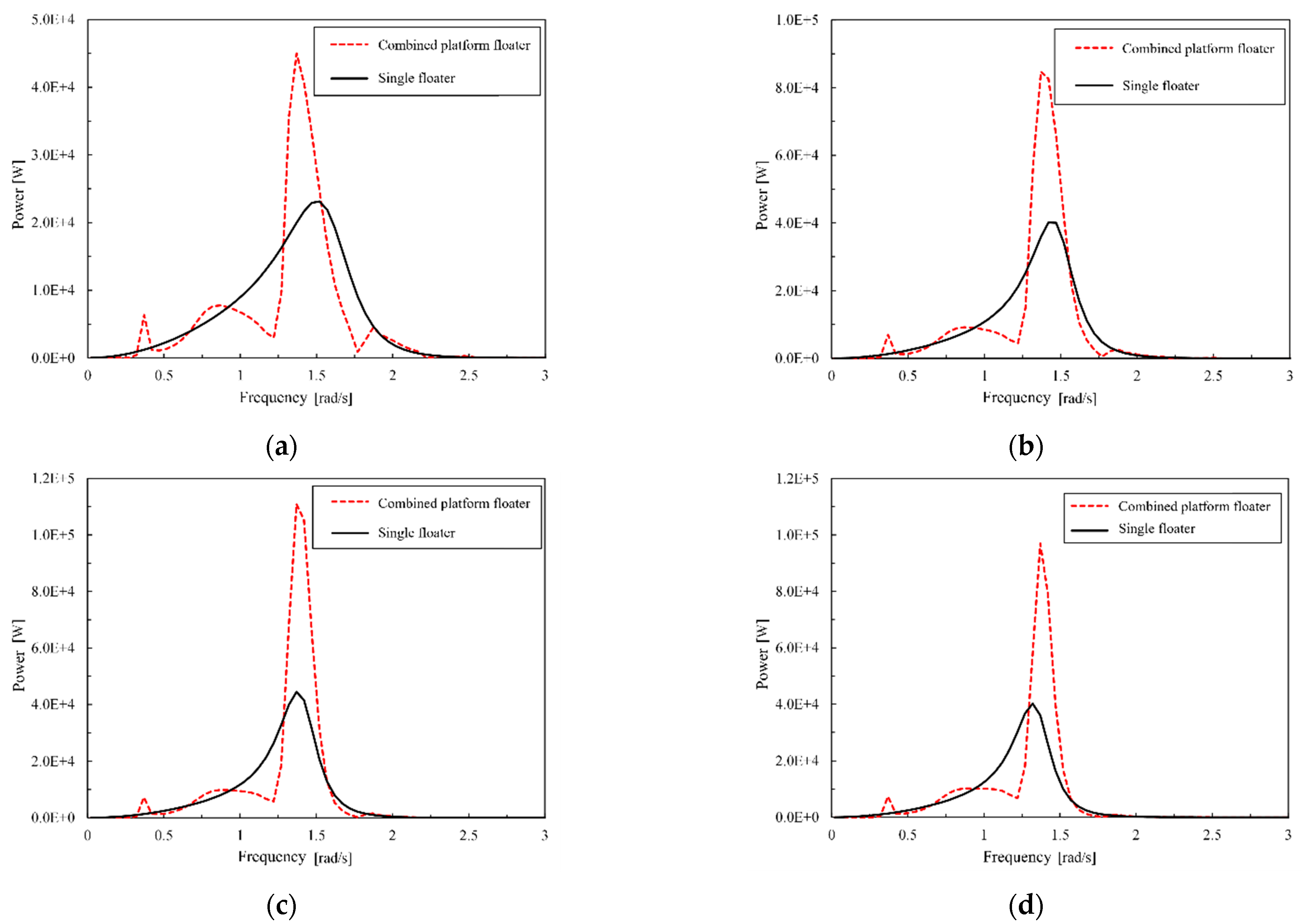
3.3. RAO and Average Power of the Floater in Free-Floating State
4. Response Analysis in Time-Domain
4.1. Analysis of Dynamic Response and Wave Energy Conversion Efficiency of Combined Platform under Regular Waves
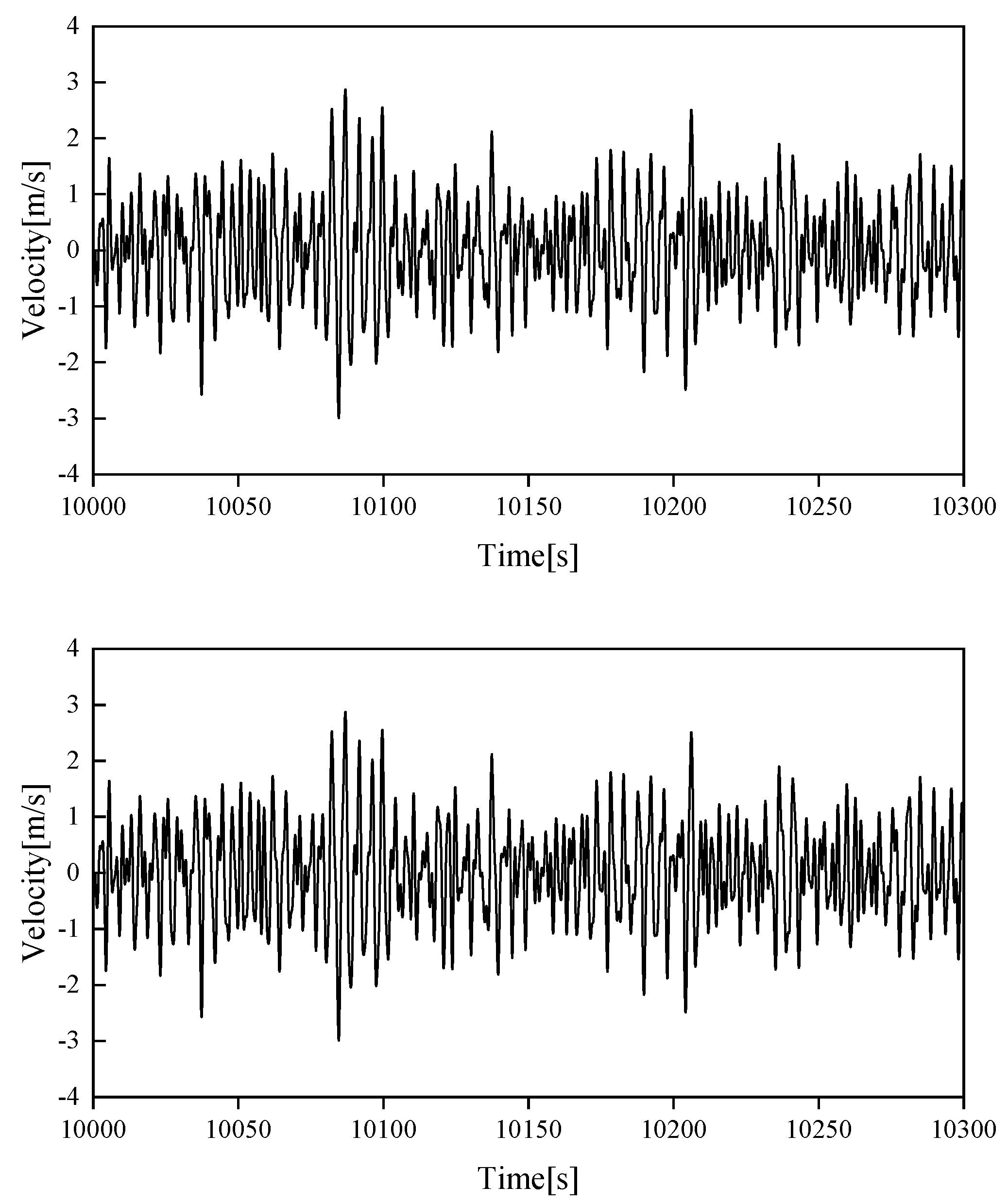
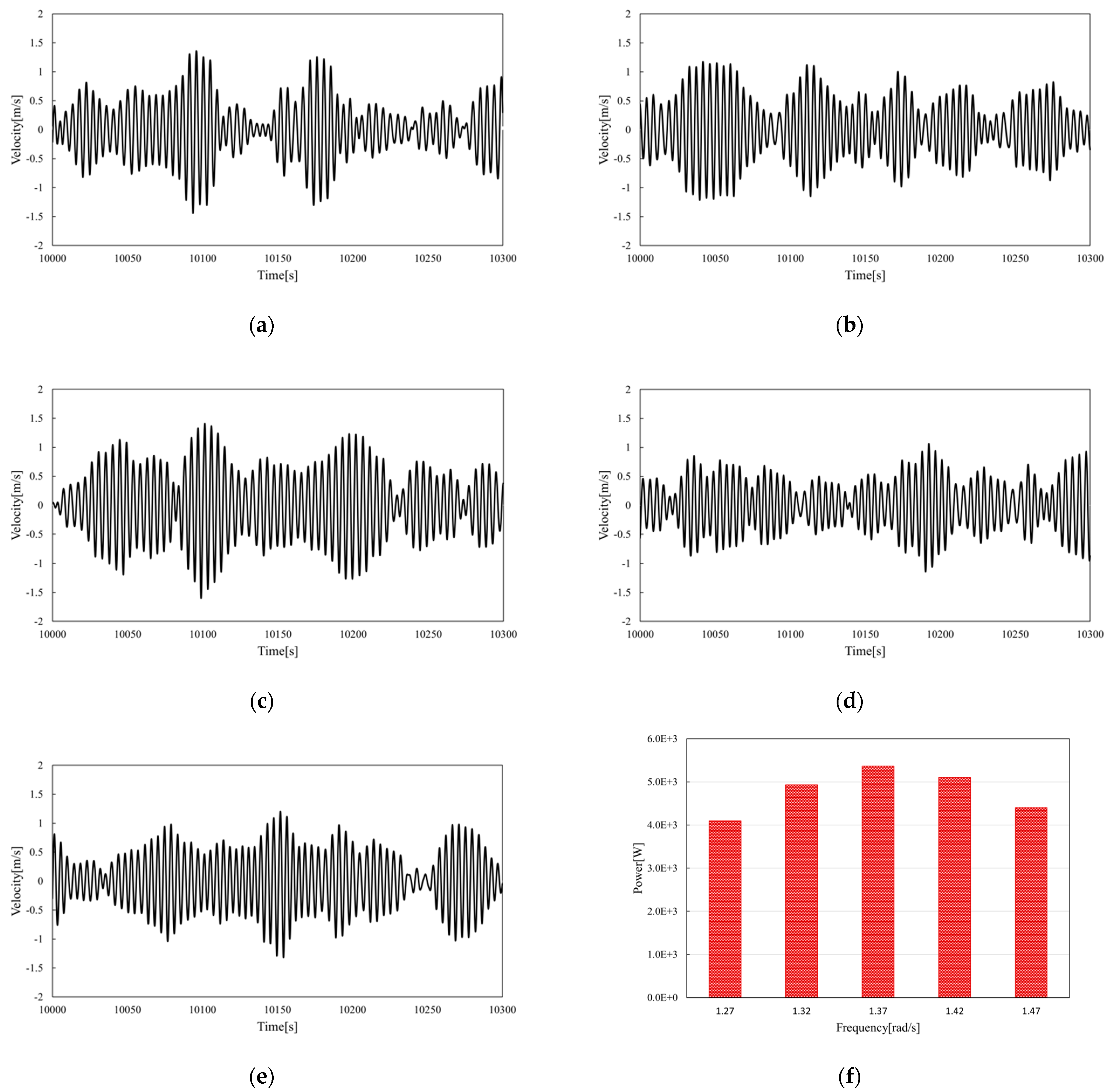
4.2. Analysis of Dynamic Response and Wave Energy Conversion Efficiency of Combined Platform under Irregular Waves
5. Conclusions
- The viscous damping of the point absorber has a great influence on the response of the floater itself. The viscous correction method adopted in this study provides linear damping, which makes up for the ignorance of the viscous effect of fluid in ANSYS-AQWA.
- When the wave direction is 0°, and the wave frequency is 1.37 rad/s, the floating wind-wave combined platform achieves the highest power generation efficiency among the sea-stated considered in this study.
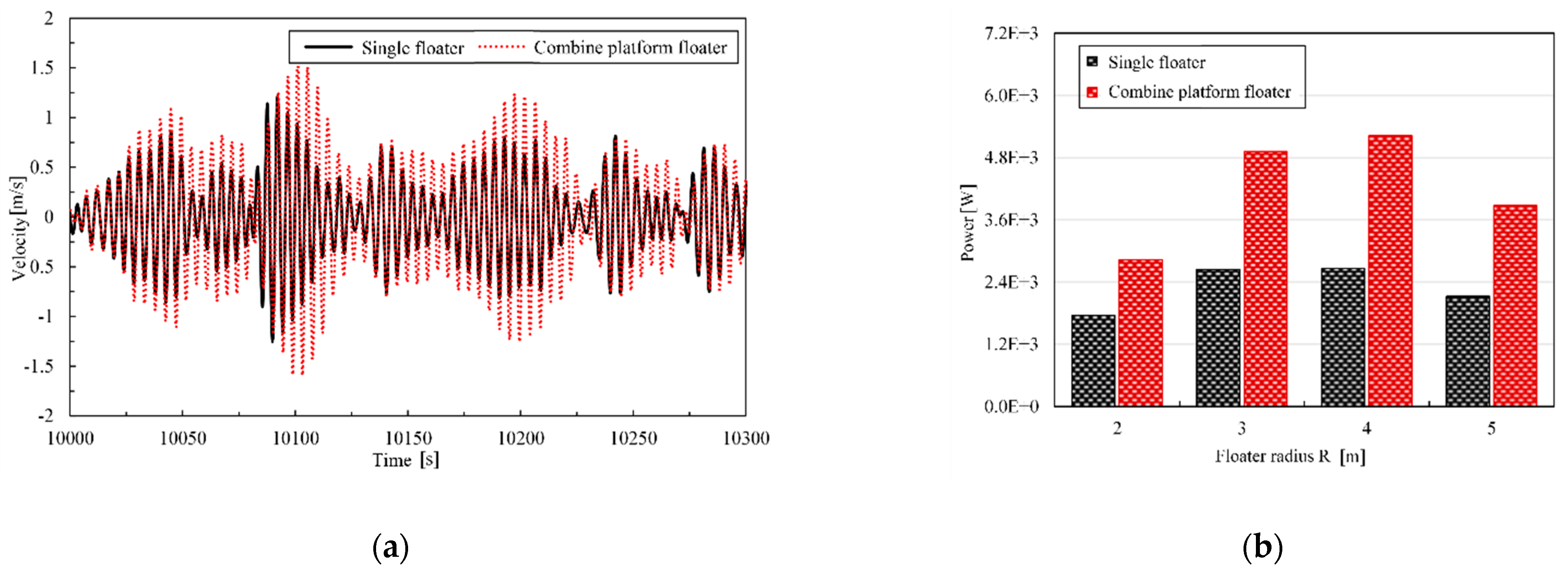
- Under the configuration of PTO stiffness and damping in this research, the point absorber with a radius of 4 m has the most obvious effect on improving the WEC efficiency of the combined plant.
- Compared with the single point absorber, the floating wind-wave combined platform proposed in this study has a significant increase in power generation, and the foundation response of the semi-submersible platform is not affected by the point absorber, which is of great significance for improving the overall power generation efficiency and reducing the combined power generation cost.
Author Contributions
Funding
Conflicts of Interest
References
- Peiffer, A.; Roddier, D.; Aubault, A. Design of a point absorber inside the WindFloat structure. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; Volume 44373, pp. 247–255. [Google Scholar]
- Aubault, A.; Alves, M.; Sarmento, A.; Roddier, D.; Peiffer, A. Modeling of an oscillating water column on the floating foundation WindFloat. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; Volume 44373, pp. 235–246. [Google Scholar]
- Soulard, T.; Babarit, A. Numerical assessment of the mean power production of a combined wind and wave energy platform. In Proceedings of the International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Rio de Janeiro, Brazil, 1–6 July 2012; Volume 44946, pp. 413–423. [Google Scholar]
- Muliawan, M.J.; Karimirad, M.; Moan, T.; Gao, G. STC (Spar-Torus Combination): A combined spar-type floating wind turbine and large point absorber floating wave energy convertor—Promising and challenging. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 44946, pp. 667–676. [Google Scholar]
- Luan, C.; Michailides, C.; Gao, Z.; Moan, T. Modeling and analysis of a 5 MW semi-submersible wind turbine combined with three flap-type wave energy convertors. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; American Society of Mechanical Engineers: New York, NY, USA; Volume 45547, p. V09BT09A028. [Google Scholar]
- Gaspar, J.F.; Kamarlouei, M.; Thiebaut, F.; Guedes Soares, C. Compensation of a hybrid platform dynamics using wave energy converters in different sea state conditions. Renew. Energy 2021, 177, 871–883. [Google Scholar] [CrossRef]
- Michailides, C.; Luan, C.; Gao, Z.; Moan, T. Effect of flap type wave energy converters on the response of a semi-submersible wind turbine in operational conditions. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; Volume 45547, p. V09BT09A014. [Google Scholar]
- Wan, L.; Gao, Z.; Moan, T.; Lugni, C. Comparative experimental study of the survivability of a combined wind and wave energy converter in two testing facilities. Ocean. Eng. 2016, 111, 82–94. [Google Scholar] [CrossRef] [Green Version]
- Muliawan, M.J.; Karimirad, M.; Gao, Z.; Moan, T. Extreme responses of a combined spar-type floating wind turbine and floating wave energy converter (STC) system with survival modes. Ocean. Eng. 2013, 65, 71–82. [Google Scholar] [CrossRef]
- Hallak, T.S.; Karmakar, D.; Guedes Soares, C. Hydrodynamic performance of semi-submersible FOWT combined with point-absorber WECs. In Developments in Maritime Technology and Engineering; CRC Press: London, UK, 2021; pp. 577–585. [Google Scholar]
- Wang, Y.; Zhang, L.; Michailides, C.; Wan, L.; Shi, W. Hydrodynamic Response of a Combined Wind–Wave Marine Energy Structure. J. Mar. Sci. Eng. 2020, 8, 253. [Google Scholar] [CrossRef] [Green Version]
- González, I.T.; Ricci, P.; Lara, M.J.S.; Morán, G.P.; Papo, F.B. Design, modelling and analysis of a combined semi-submersible floating wind turbine and wave energy point-absorber. In Proceedings of the ASME 2013 32st International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–15 June 2013; pp. 1–11. [Google Scholar]
- Sun, K.; Yi, Y.; Zheng, X.; Cui, L.; Zhao, C.; Liu, M.; Rao, X. Experimental investigation of semi-submersible platform combined with point-absorber array. Energy Convers. Manag. 2021, 245, 114623. [Google Scholar] [CrossRef]
- Hu, J.; Zhou, B.; Vogel, C.; Liu, P.; Willden, R.; Sun, K.; Zang, J.; Geng, J.; Jin, P.; Cui, L.; et al. Optimal design and performance analysis of a hybrid system combing a floating wind platform and wave energy convertors. Appl. Energy 2020, 269, 114998. [Google Scholar] [CrossRef]
- Lee, H.; Poguluri, S.K.; Bae, Y.H. Performance analysis of multiple wave energy convertors placed on a floating platform in the frequency-domain. Energies 2018, 11, 406. [Google Scholar] [CrossRef] [Green Version]
- Hantoro, R.; Septyaningrum, E.; Hudaya, Y.R.; Utama, I.K.A.P. Stability analysis for trimaran pontoon array in wave energy converter–pendulum system (WEC-PS). Brodogr. Teor. I Praksa Brodogr. I Pomor. Teh. 2022, 73, 59–68. [Google Scholar] [CrossRef]
- Chen, M.; Wang, R.; Xiao, P.; Zhu, L.; Li, F.; Sun, L. Numerical analysis of a floating semi-submersible wind turbine integrated with a point absorber wave energy convertor. In Proceedings of the The 30th International Ocean and Polar Engineering Conference, Virtual, 12 October 2020. [Google Scholar]
- Chen, M.; Xiao, P.; Zhou, H.; Li, C.B.; Zhang, X. Fully Coupled Analysis of an Integrated Floating Wind-Wave Power Generation Platform in Operational Sea-states. Front. Energy Res. 2022, 10, 931057. [Google Scholar] [CrossRef]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; NREL/TP-5000-60601; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014. [Google Scholar]
- Cheng, P.; Huang, Y.; Wan, D. A numerical model for fully coupled aero-hydrodynamic analysis of floating offshore wind turbine. Ocean. Eng. 2019, 173, 183–196. [Google Scholar] [CrossRef]
- Tom, N.M. Design and Control of a Floating Wave-Energy Convertor Utilizing a Permanent Magnet Linear Generator; UC Berkeley: Berkeley, CA, USA, 2013. [Google Scholar]
- Sun, K.; Xie, G.; Zhou, B. Type selection and hydrodynamic performance analysis of wave energy convertors. J. Harbin Eng. Univ. 2021, 42, 8–14. [Google Scholar]
- Cummins, W.E. The Impulse Response Function and Ship Motions; David Taylor Model Basin Washington DC: Washington, DC, USA, 1962. [Google Scholar]
- Ogilvie, T.F. Recent progress toward the understanding and prediction of ship motions. In Proceedings of the 5th ONR Symp. on Naval Hydrodynamics, Bergen, Norway, 10–12 September 1964. [Google Scholar]
- Folley, M. Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Academic Press: London, UK, 2016; Volume 23. [Google Scholar]
- Chen, M.; Xiao, P.; Zhang, Z.; Sun, L.; Li, F. Effects of the end-stop mechanism on the nonlinear dynamics and power generation of a point absorber in regular waves. Ocean. Eng. 2021, 242, 110123. [Google Scholar] [CrossRef]
- Chen, M.; Guo, H.; Wang, R.; Tao, R.; Cheng, N. Effects of gap resonance on the hydrodynamics and dynamics of a multi-module floating system with narrow gaps. J. Mar. Sci. Eng. 2021, 9, 1256. [Google Scholar] [CrossRef]
- Liu, H.; Chen, M.; Han, Z.; Zhou, H.; Li, L. Feasibility Study of a Novel Open Ocean Aquaculture Ship Integrating with a Wind Turbine and an Internal Turret Mooring System. J. Mar. Sci. Eng. 2022, 10, 1729. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometric Parameter | Value |
|---|---|
| Draft of platform SWL (m) | 20 |
| Elevation of upper columns above SWL (m) | 12 |
| Spacing between offset columns (m) | 50 |
| Length of upper columns (m) | 26 |
| Length of base columns (m) | 6 |
| Diameter of base column (m) | 6.5 |
| Diameter of upper columns (m) | 12 |
| Radius (m) | Quality (Kg) | Hydrostatic Stiffness (N/m) | Viscous Damping (Ns/m) | Damping Correction Coefficient |
|---|---|---|---|---|
| 2 | 3.76 × 104 | 1.26 × 105 | 0.38 × 104 | 0.0229 |
| 3 | 8.46 × 104 | 2.83 × 105 | 1.15 × 104 | 0.0291 |
| 4 | 1.50 × 105 | 5.05 × 105 | 2.02 × 104 | 0.0272 |
| 5 | 2.35 × 105 | 7.89 × 105 | 2.97 × 104 | 0.0244 |
| Geometric Parameter | Value |
|---|---|
| Number of Mooring Lines | 3 |
| Angle Between Adjacent Lines | 120° |
| Depth to Anchors Below SWL | 200 m |
| Depth to Fairleads Below SWL | 14 m |
| Radius to Anchors from Platform Centerline | 837.6 m |
| Radius to Fairleads from Platform Centerline | 40.868 m |
| Unstretched Mooring Line Length | 835.5 |
| Mooring Line Diameter | 0.0766 m |
| Equivalent Mooring Line Mass Density | 113.35 kg/m |
| Equivalent Mooring Line Mass in Water | 108.63 kg/m |
| Equivalent Mooring Line Extensional Stiffness | 753.6 MN |
| Hydrodynamic Drag Coefficient for Mooring Lines | 1.1 |
| Hydrodynamic Added-Mass Coefficient for Mooring Lines | 1.0 |
| Seabed Drag Coefficient for Mooring Lines | 1.0 |
| Structural Damping of Mooring Lines | 2.0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Li, B.; Hu, Z.; Deng, J.; Xiao, P.; Chen, M. Research on Size Optimization of Wave Energy Converters Based on a Floating Wind-Wave Combined Power Generation Platform. Energies 2022, 15, 8681. https://doi.org/10.3390/en15228681
Zhang X, Li B, Hu Z, Deng J, Xiao P, Chen M. Research on Size Optimization of Wave Energy Converters Based on a Floating Wind-Wave Combined Power Generation Platform. Energies. 2022; 15(22):8681. https://doi.org/10.3390/en15228681
Chicago/Turabian StyleZhang, Xianxiong, Bin Li, Zhenwei Hu, Jiang Deng, Panpan Xiao, and Mingsheng Chen. 2022. "Research on Size Optimization of Wave Energy Converters Based on a Floating Wind-Wave Combined Power Generation Platform" Energies 15, no. 22: 8681. https://doi.org/10.3390/en15228681