
Magnet Slotting Design to Reduce High Order Electromagnetic Force and Vibration of Permanent Magnet Motor


Abstract
:1. Introduction
2. Modulated Vibration Source Analysis
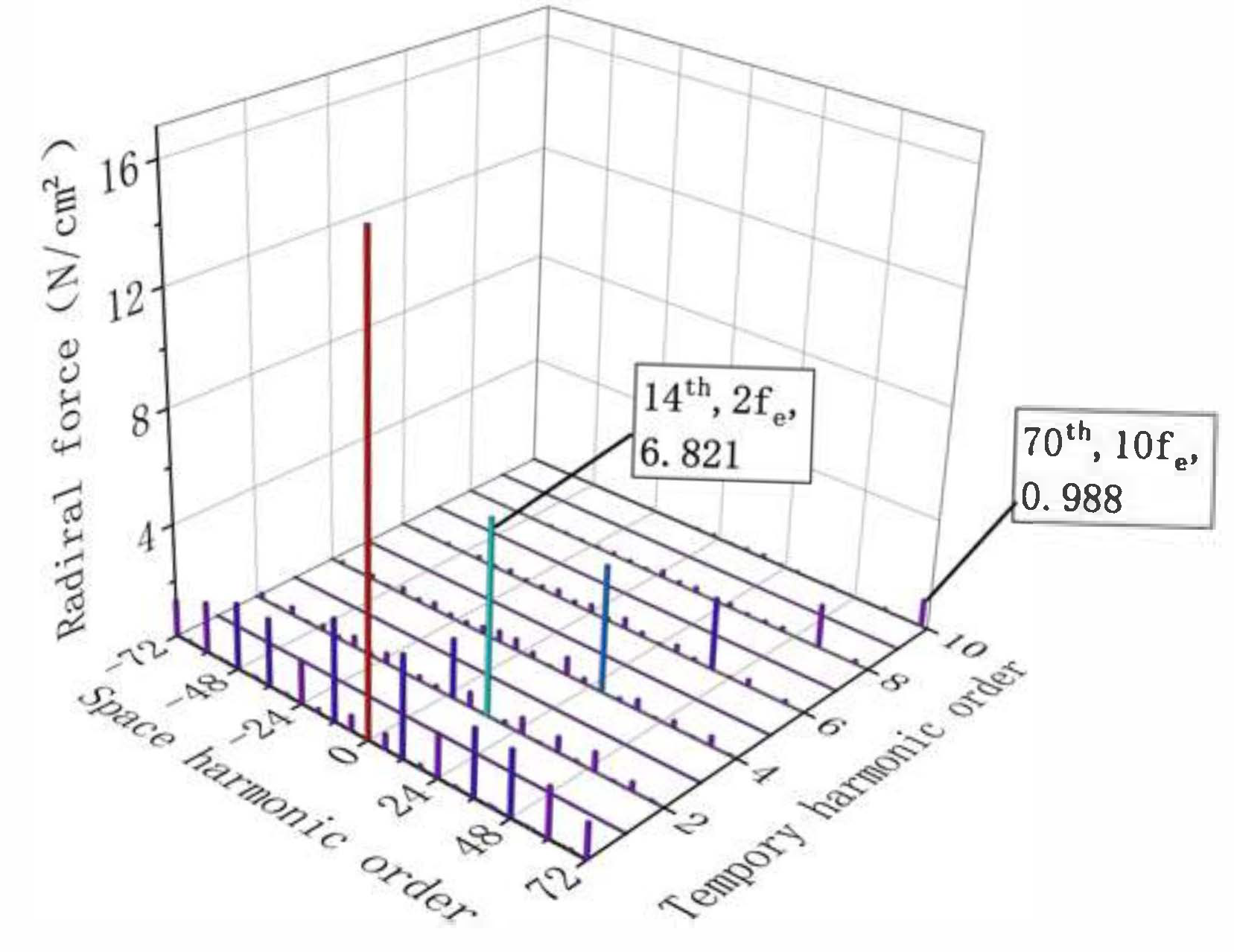
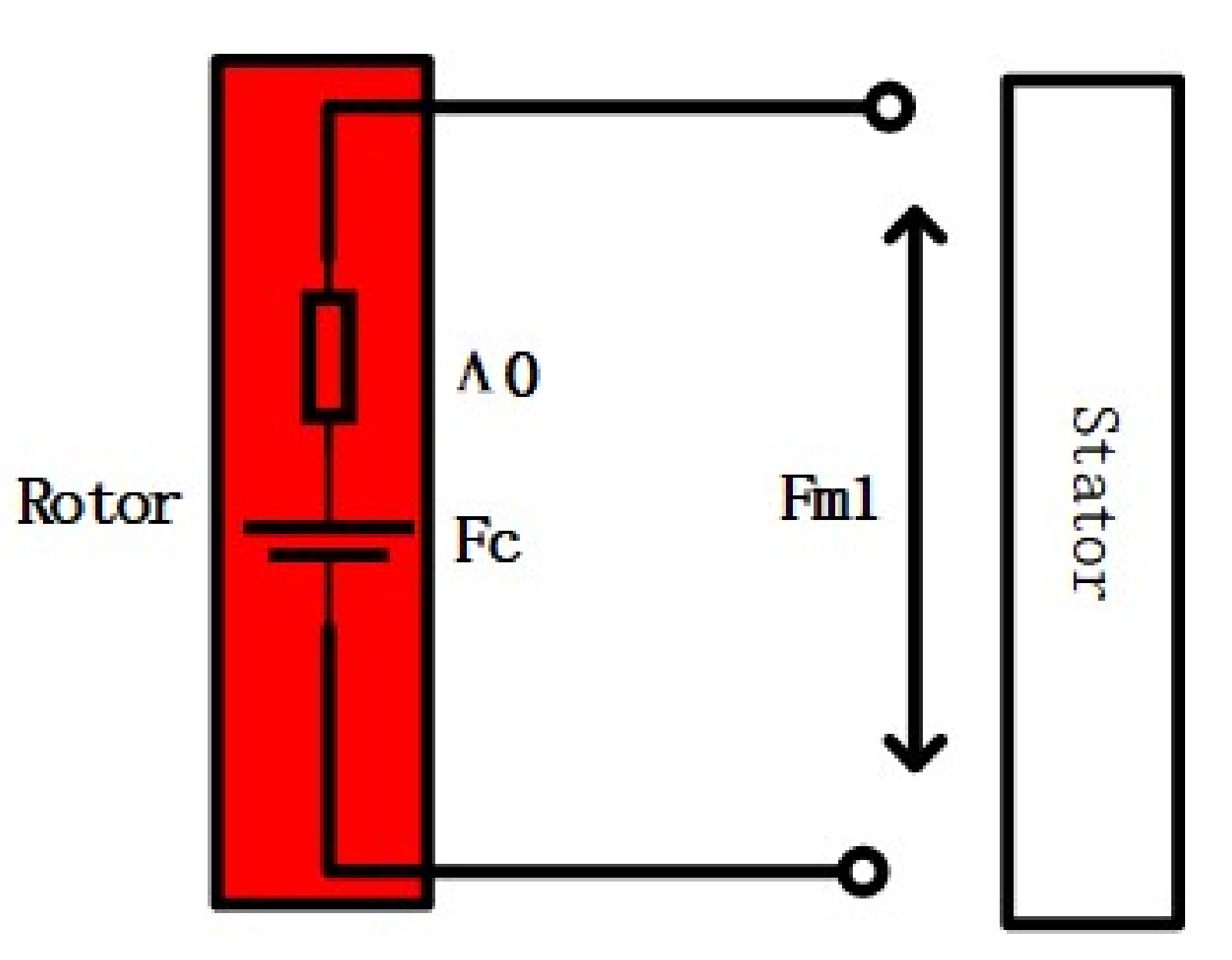
2.1. Analysis of Radial Electromagnetic Force
2.2. Generation of Modulation Vibrations
3. Research on Modulation Vibration Optimization Method
3.1. Principle of Analysis
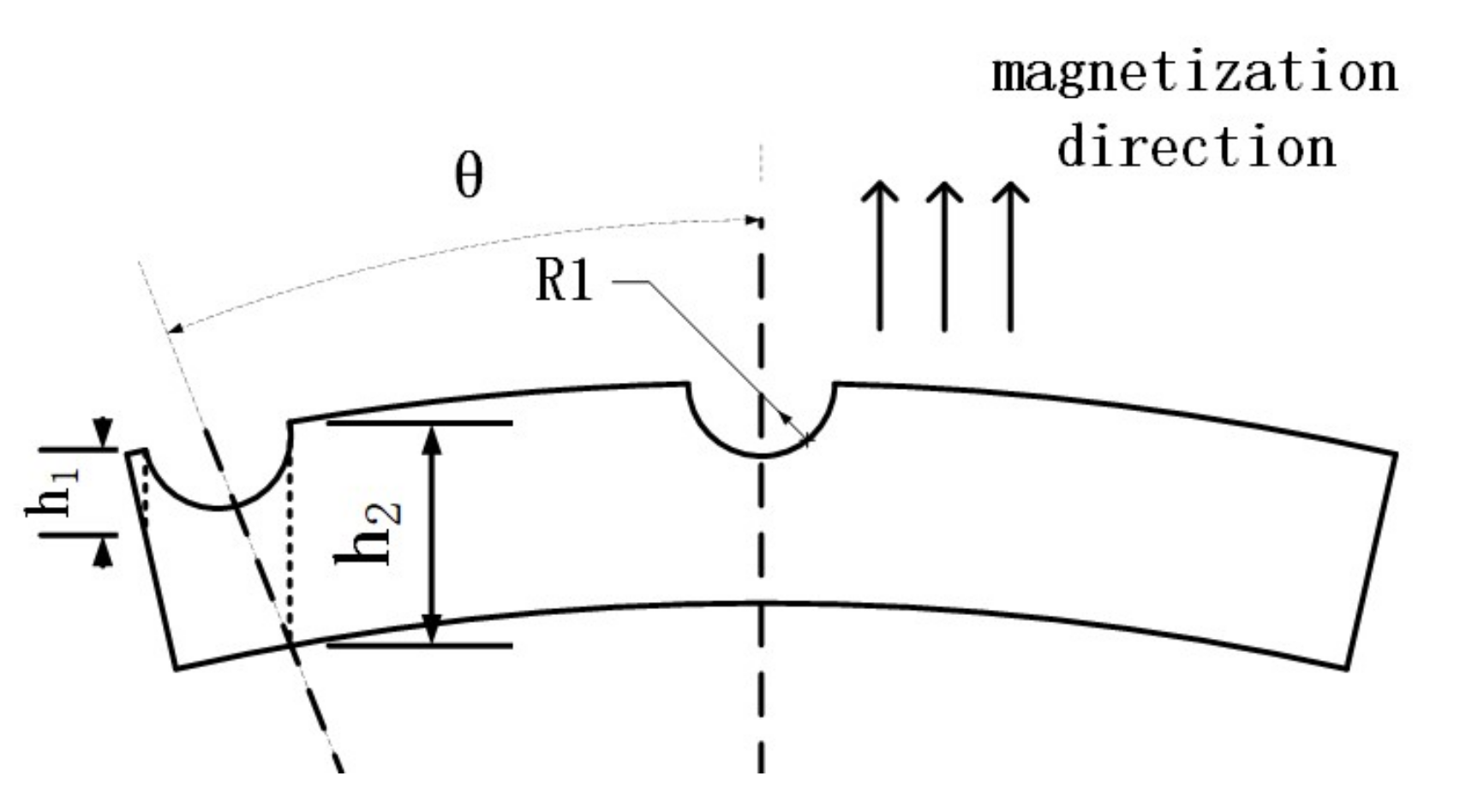
3.2. Auxiliary Slot Shape Optimization
3.3. Results Analysis
3.4. Comparison of the Proposed and Traditional Methods
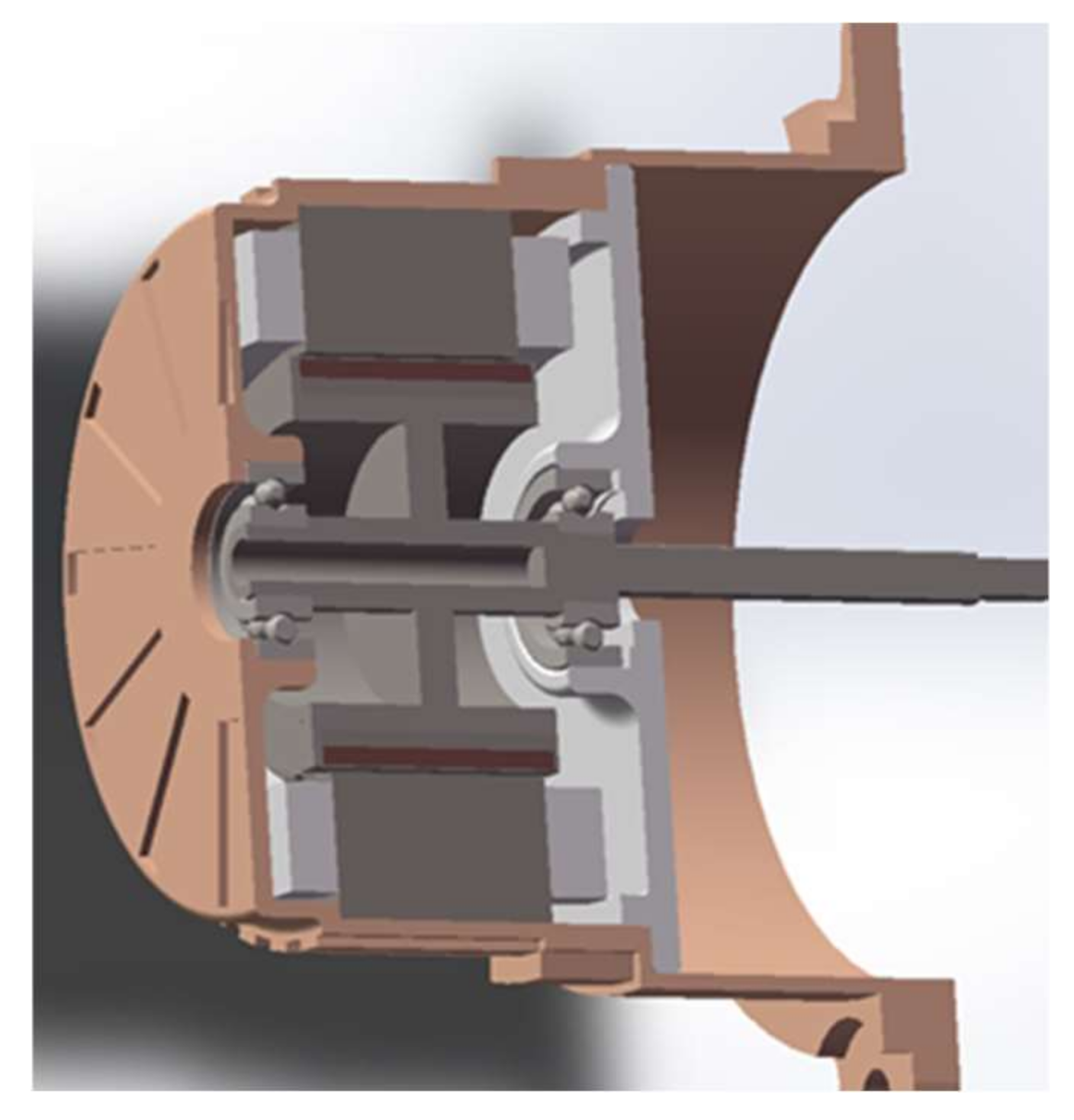
4. Experimental Verification
5. Conclusions
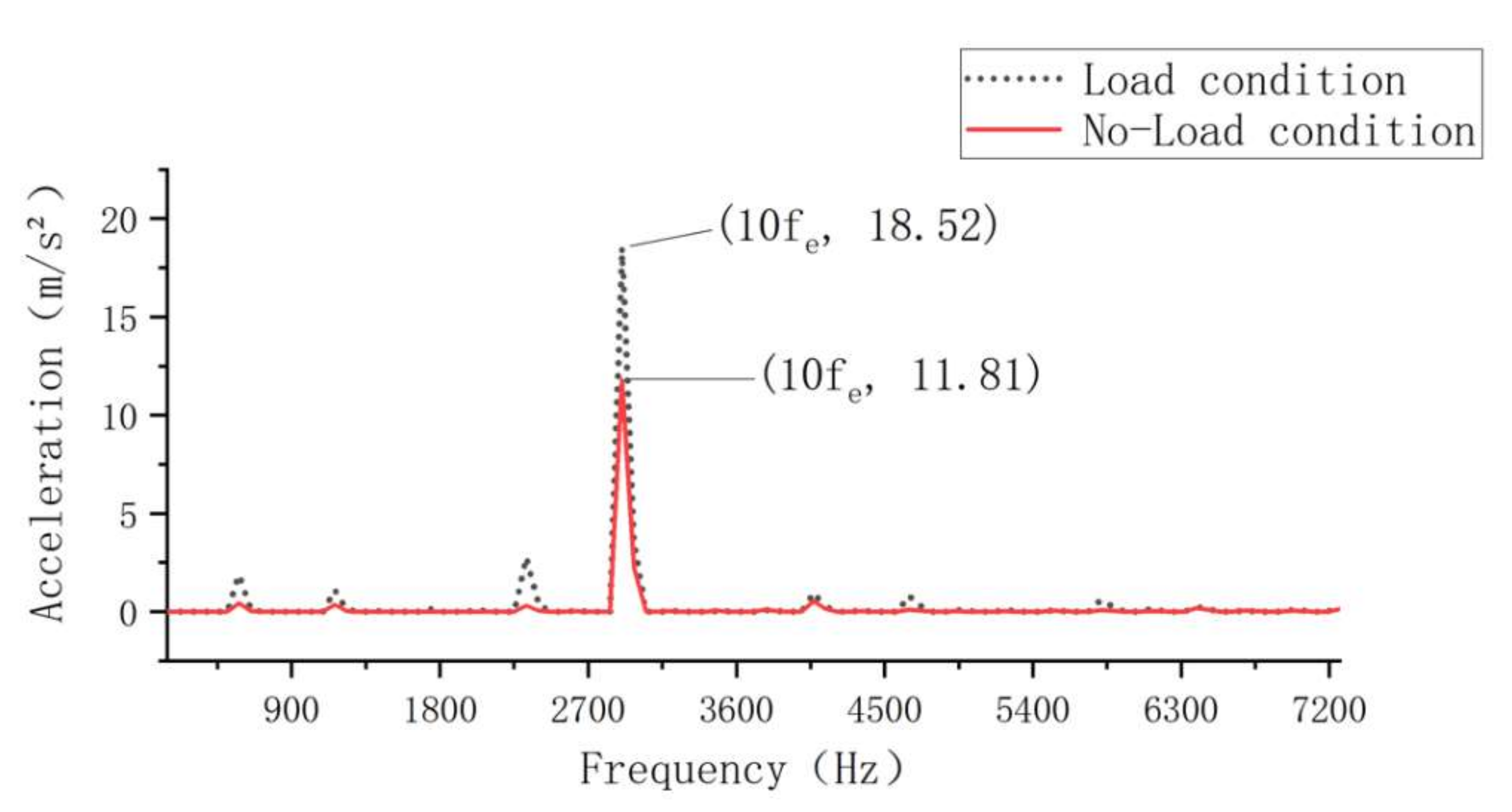
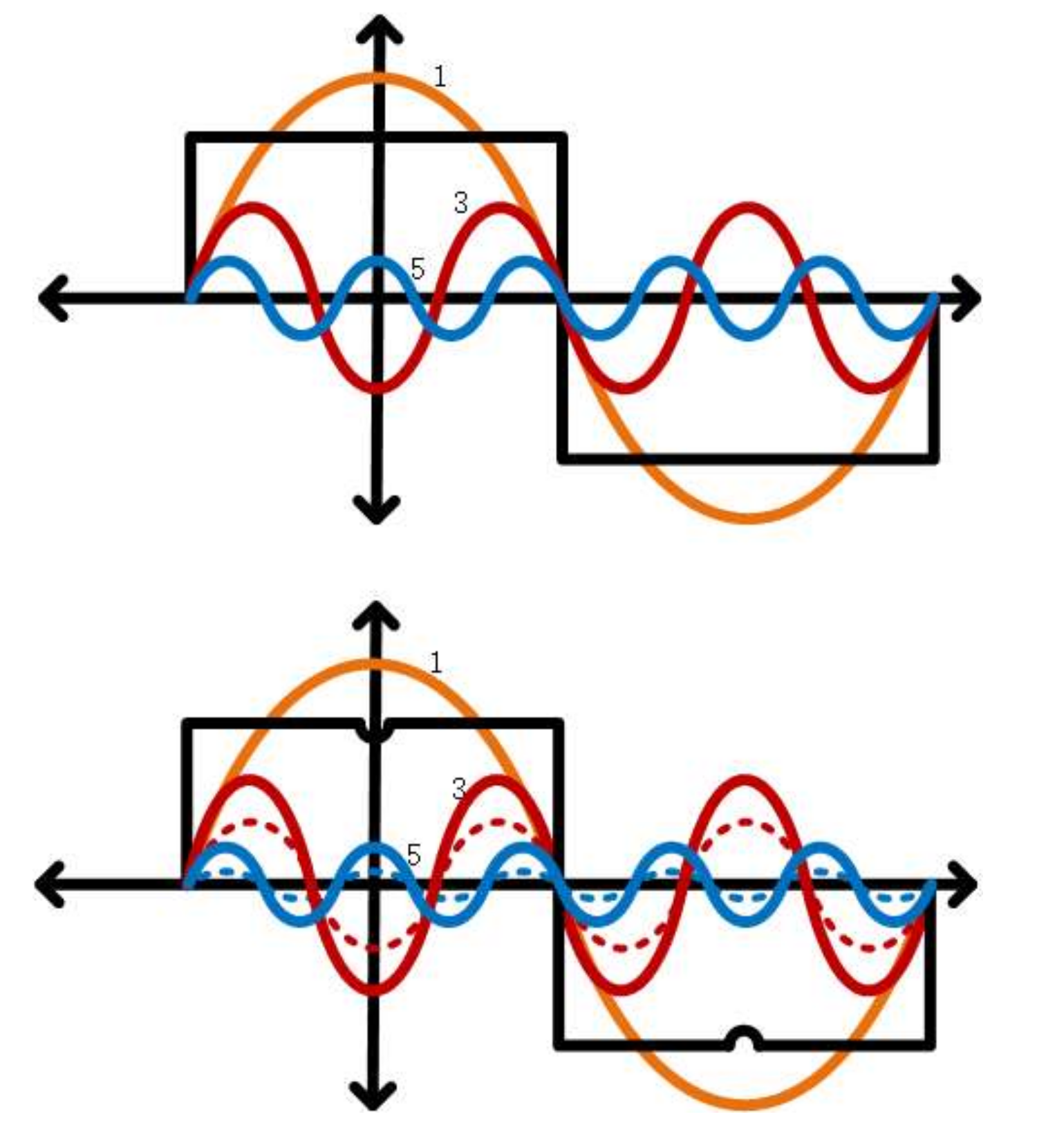
- The source of the electromagnetic force may be classified into three parts: the self-interaction of the permanent magnetic field, the self-interaction of the armature magnetic field, and the interaction between the armature magnetic field and the permanent magnetic field.The modulation effect of the electromagnetic force was investigated and the results showed that after adding slots to the motor stator, the higher-order electromagnetic force modulated to a lower-order vibration response, leading to significant vibrations.
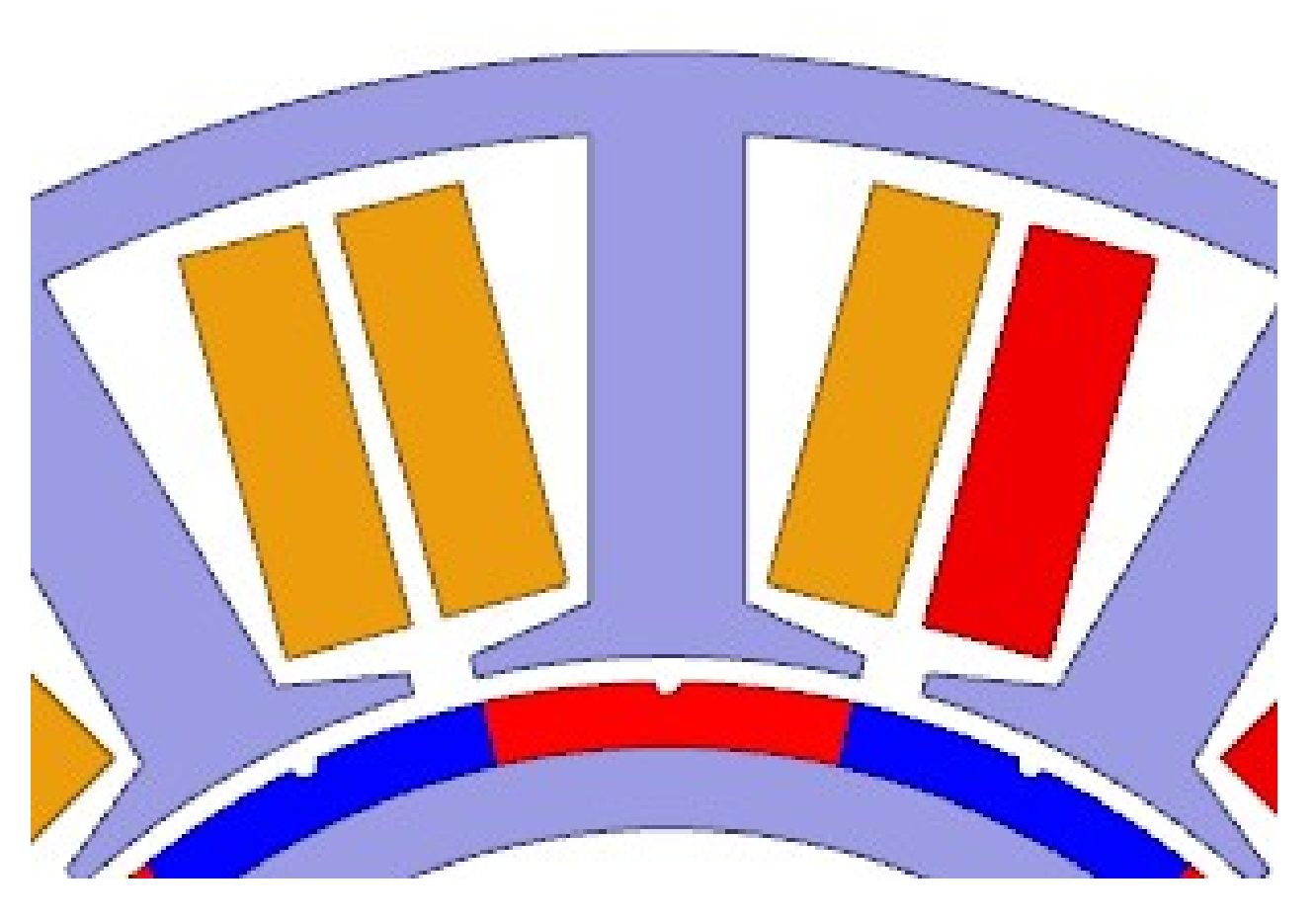
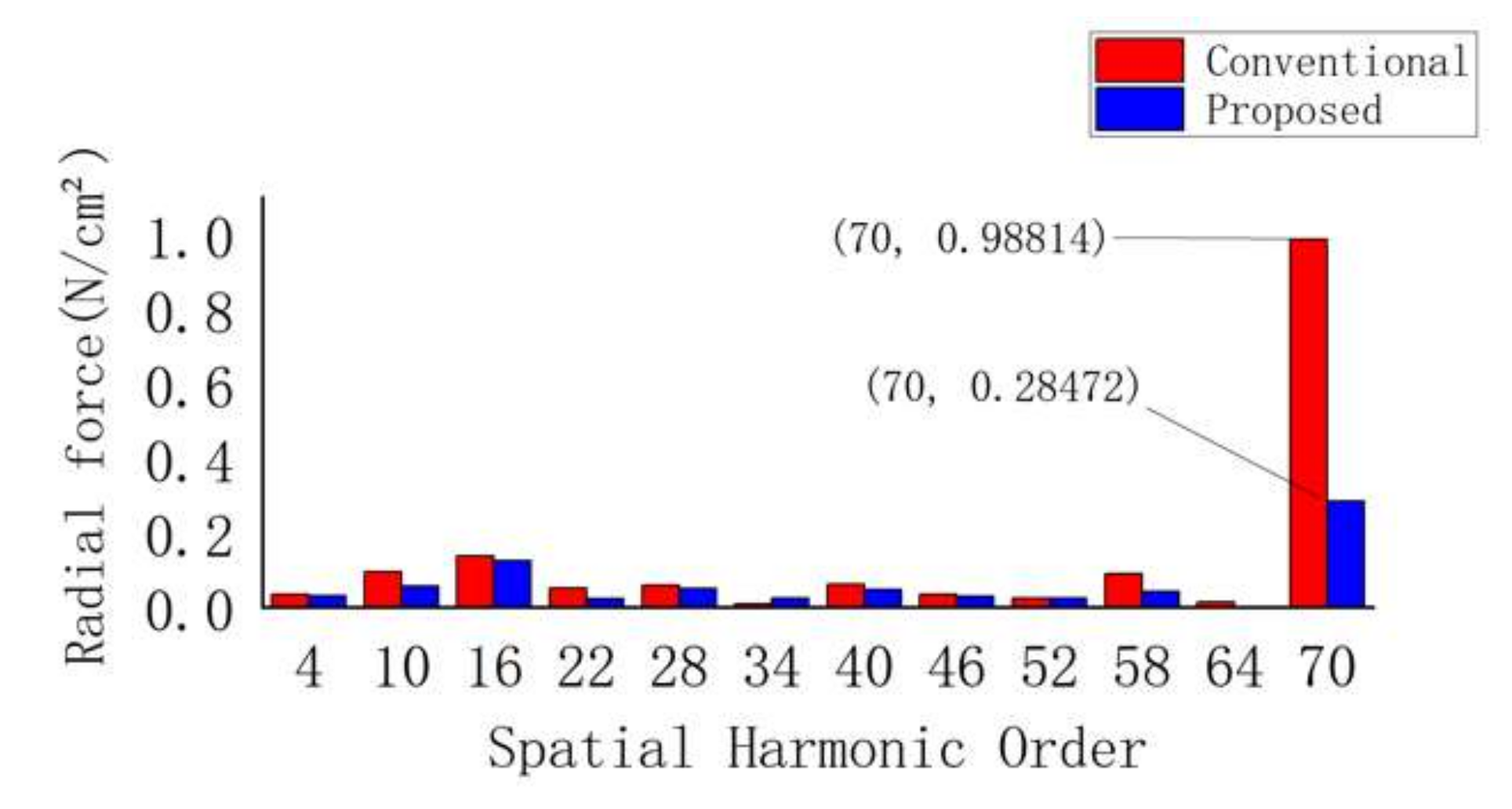
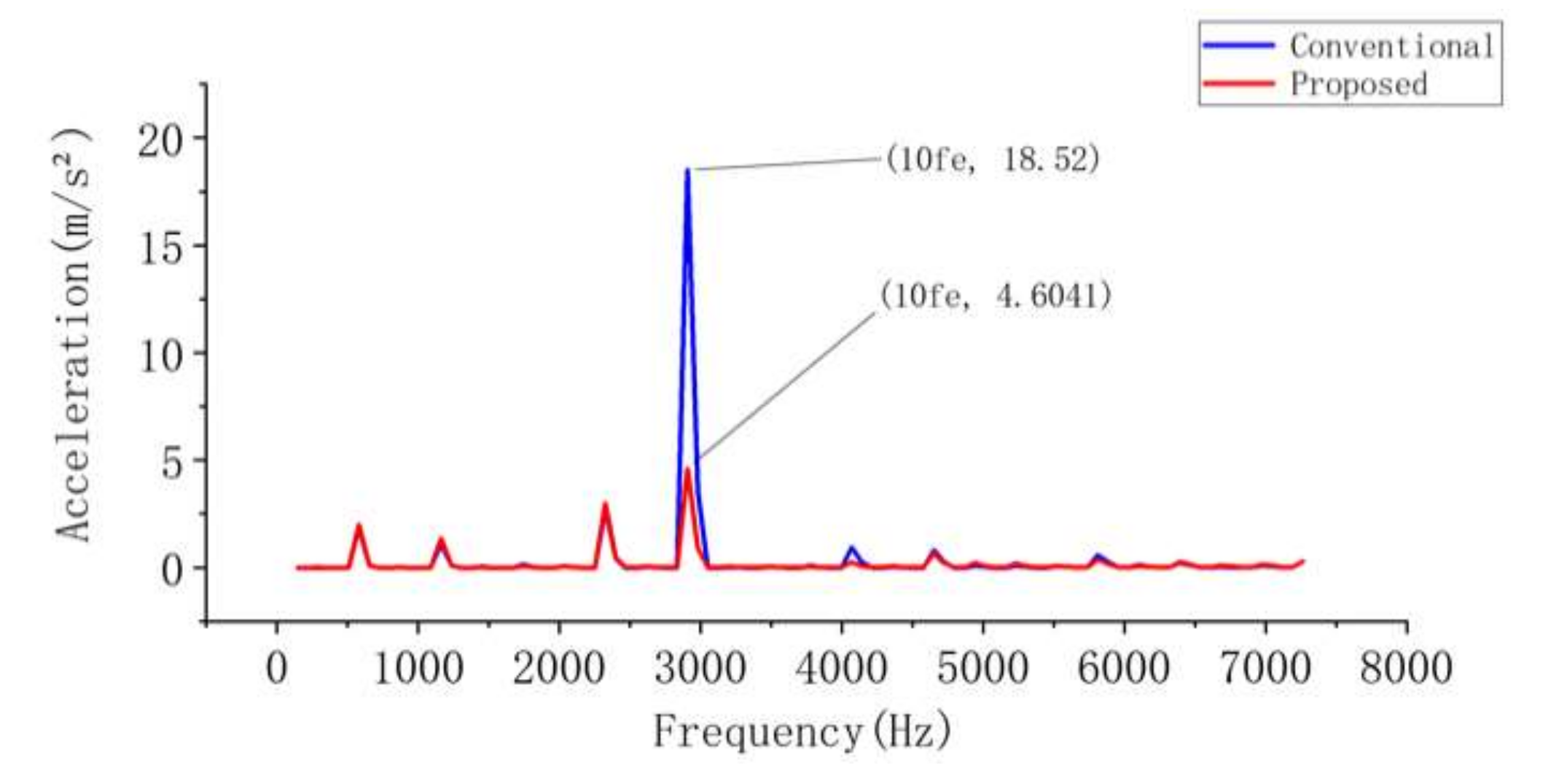
- A new method of slotting on the surface of permanent magnets was proposed to reduce the higher order electromagnetic force of PM motors. Further, the principle of permanent magnet slotting to reduce flux density harmonics was qualitatively analyzed. It was found that varying the auxiliary slotting parameters leads to variations of each order of flux density harmonics. Finally, the optimal slotting noise reduction method was found by optimizing the slotting parameters. After slotting, the 70th-order electromagnetic force wave at 10fe was greatly reduced, thus reducing the vibration acceleration at 10fe, which has the greatest influence on the motor noise. In addition, this method ensures that the output torque is not significantly decreased.
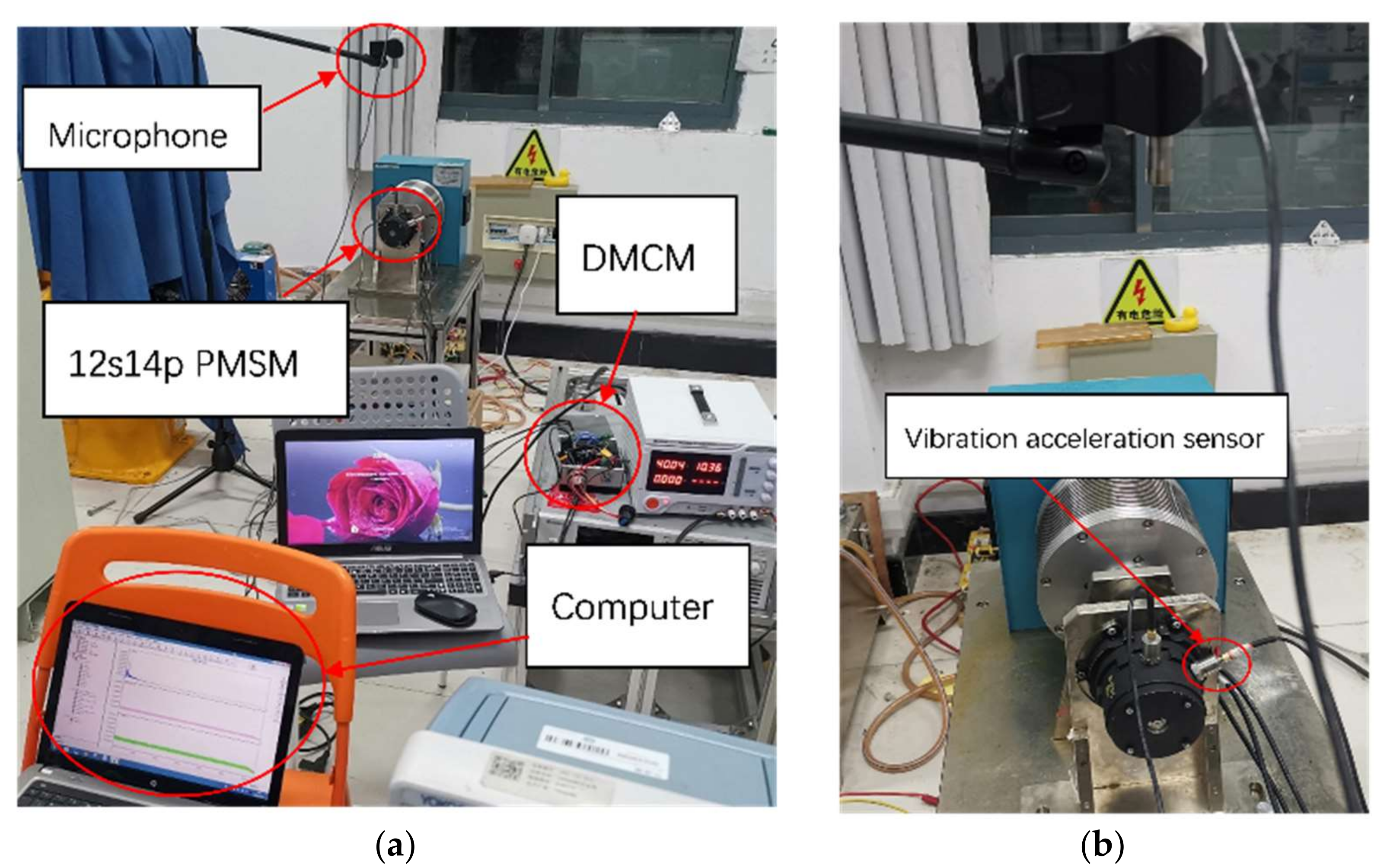
- The accuracy of our finite element analysis and the correctness of the noise reduction method were empirically verified.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Song, C.; Liu, R.; Zheng, W.; Liu, Y. Research on the stealth technology of foreign underwater unmanned mobile vehicle. Ship Sci. Technol. 2021, 43, 186–189. [Google Scholar]
- Mohamed, A.T. Emerging Nanotechnology Applications in Electrical Engineering; IGI Global, Publisher of Timely Knowledge: Hershey, PA, USA, 2021. [Google Scholar]
- Zhang, P.; Niu, J.; Zhang, X.; Mao, S.; Liu, J.; Yang, B. Thick Film Ultrasonic Micromotor Based on Chemical Mechanical Thinning and Polishing Process. IEEE Electron. Device Lett. 2022, 43, 1547–1550. [Google Scholar] [CrossRef]
- Mohamed, A.T. Design and Investment of High Voltage NanoDielectrics; IGI Global, Publisher of Timely Knowledge: Hershey, PA, USA, 2020. [Google Scholar]
- Mohamed, A.T. Theoretical analysis for effects of nanoparticles on dielectric characterization of electrical industrial materials. Electr. Eng. ELEN 2017, 99, 487–493. [Google Scholar] [CrossRef]
- Dziechciarz, A.; Popp, A.; Marțiș, C.; Sułowicz, M. Analysis of NVH Behavior of Synchronous Reluctance Machine for EV Applications. Energies 2022, 15, 2785. [Google Scholar] [CrossRef]
- Cheng, M.; Han, P.; Hua, W. General Airgap Field Modulation Theory for Electrical Machines. IEEE Trans. Ind. Electron. 2018, 64, 6063–6074. [Google Scholar] [CrossRef]
- Fang, H.; Li, D.; Qu, R.; Yan, P. Modulation Effect of Slotted Structure on Vibration Response in Electrical Machines. IEEE Trans. Transp. Electron. 2019, 66, 2998–3007. [Google Scholar] [CrossRef]
- Zhu, S.; Zhao, W.; Ji, J.; Liu, G.; Mao, Y.; Liu, T. Investigation of Bread-Loaf Magnet on Vibration Performance in FSCW PMSM Considering Force Modulation Effect. IEEE Trans. Transp. Electron. 2021, 7, 1379–1389. [Google Scholar] [CrossRef]
- Yang, I.; Lee, S.; Lee, K.; Lee, J.; Kim, W.; Jang, I. A Process to Reduce the Electromagnetic Vibration by Reducing the Spatial Harmonics of Air Gap Magnetic Flux Density. IEEE Trans. Mag. 2021, 57, 1–6. [Google Scholar] [CrossRef]
- Hong, J.; Wang, S.; Sun, Y.; Sun, X.; Cao, H. Piecewise Stagger Poles with Continuous Skew Edge for Vibration Reduction in Surface-Mounted PM Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 8498–8506. [Google Scholar] [CrossRef]
- Kim, D.; Park, M.; Sim, J.; Hong, J. Advanced Method of Selecting Number of Poles and Slots for Low-Frequency Vibration Reduction of Traction Motor for Elevator. IEEE/ASME Trans. Mech. 2017, 22, 1554–1562. [Google Scholar] [CrossRef]
- Zuo, S.; Lin, F.; Wu, X. Noise Analysis, Calculation, and Reduction of External Rotor Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2015, 62, 6204–6212. [Google Scholar] [CrossRef]
- Zhu, S.; Zhao, W.; Liu, G.; Mao, Y.; Sun, Y. Effect of Phase Shift Angle on Radial Force and Vibration Behavior in Dual Three-Phase PMSM. IEEE Trans. Ind. Electron. 2021, 68, 2988–2998. [Google Scholar] [CrossRef]
- Wu, Z.; Fan, Y.; Lee, C.H.T.; Gao, D.; Yu, K. Vibration Optimization of FSCW-IPM Motor Based on Iron-Core Modification for Electric Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 14834–14845. [Google Scholar] [CrossRef]
- Dong, T.; Wang, R.; Zhang, J.; Liu, K. Influence of auxiliary slot on electromagnetic vibration in PMSM with similar slot and pole number. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017; pp. 1–5. [Google Scholar]
- Wang, K.; Sun, H.; Zhang, L.; Liu, C.; Zhu, Z. An Overview of Rotor Pole Optimization Techniques for Permanent Magnet Synchronous Machines. Proc. CSEE 2017, 37, 7304–7317+7445. [Google Scholar]
- Chi, F.; Wu, L.; Yang, X. Optimum design of voice coil motor using for nano-stage in lithographic equipment. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 27–30 June 2014; pp. 2540–2543. [Google Scholar]
- Yu, H.; Yu, B.; Yu, J.; Lin, C. A Dual Notched Design of Radial-Flux Permanent Magnet Motors with Low Cogging Torque and Rare Earth Material. IEEE Trans. Mag. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Zhou, Y.; Ji, J.; Zhao, W.; Zhu, S.; Liu, H. Modulated Vibration Reduction Design for Integral-Slot Interior Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2022, 69, 12249–12260. [Google Scholar] [CrossRef]
- Tang, R. Modern Permanent Magnet Machines: Theory and Design; China Machine Press: Beijing, China, 2016. [Google Scholar]
- Wang, Q.; Zhao, P.; Du, X.; Lin, F.; Li, X. Electromagnetic Vibration Analysis and Slot–Pole Structural Optimization for a Novel Integrated Permanent Magnet in-Wheel Motor. Energies 2020, 13, 3488. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items (Unit) | Value |
|---|---|
| Number of pole-pairs | 7 |
| Number of slots | 12 |
| Stator outer diameter (mm) | 68 |
| Stator inner diameter (mm) | 10 |
| Air-gap length (mm) | 1.2 |
| PM thickness (mm) | 3.4 |
| Core length (mm) | 22 |
| PM length(mm) | 24 |
| PM | Armature Winding | PM& Armature Winding | |||
|---|---|---|---|---|---|
| Spatial Order | Frequency | Spatial Order | Frequency | Spatial Order | Frequency |
| (vR1 − vR2) p | (vR1 − vR2) fe | (vS1 − vS2) p | 0 | (vR − vS) p | (vR − 1) fe |
| (vR1 + vR2) p | (vR1 + vR2) fe | (vS1 + vS2) p | 2fe | (vR + vS) p | (vR + 1) fe |
| (vR1 − vR2) p ± 2z | (vR1 − vR2) fe | (vS1 − vS2) p ± 2Z | 0 | (vR − vS) p ± Z | (vR − 1) fe |
| (vR1 + vR2) p ± 2z | (vR1 + vR2) fe | (vS1 + vS2) p ± 2Z | 2fe | (vR + vS) p ± Z | (vR + 1) fe |
| (vR1 − vR2) p ± z | (vR1 − vR2) fe | (vS1 − vS2) p ± Z | 0 | (vR − vS) p ± 2Z | (vR − 1) fe |
| (vR1 + vR2) p ± z | (vR1 + vR2) fe | (vS1 + vS2) p ± Z | 2fe | (vR + vS) p ± 2Z | (vR + 1) fe |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Tian, W.; Zhao, W. Magnet Slotting Design to Reduce High Order Electromagnetic Force and Vibration of Permanent Magnet Motor. Energies 2022, 15, 8684. https://doi.org/10.3390/en15228684
Wang Z, Tian W, Zhao W. Magnet Slotting Design to Reduce High Order Electromagnetic Force and Vibration of Permanent Magnet Motor. Energies. 2022; 15(22):8684. https://doi.org/10.3390/en15228684
Chicago/Turabian StyleWang, Zifei, Wei Tian, and Wenxiang Zhao. 2022. "Magnet Slotting Design to Reduce High Order Electromagnetic Force and Vibration of Permanent Magnet Motor" Energies 15, no. 22: 8684. https://doi.org/10.3390/en15228684
APA StyleWang, Z., Tian, W., & Zhao, W. (2022). Magnet Slotting Design to Reduce High Order Electromagnetic Force and Vibration of Permanent Magnet Motor. Energies, 15(22), 8684. https://doi.org/10.3390/en15228684