
Modeling and Experimental Analysis of Overvoltage and Inrush Current Characteristics of the Electric Rail Traction Power Supply System

Abstract
:1. Introduction
2. Transient Process and Model of SCES of High-Speed Rail Ways
2.1. Model Description of the Overvoltage of SCES
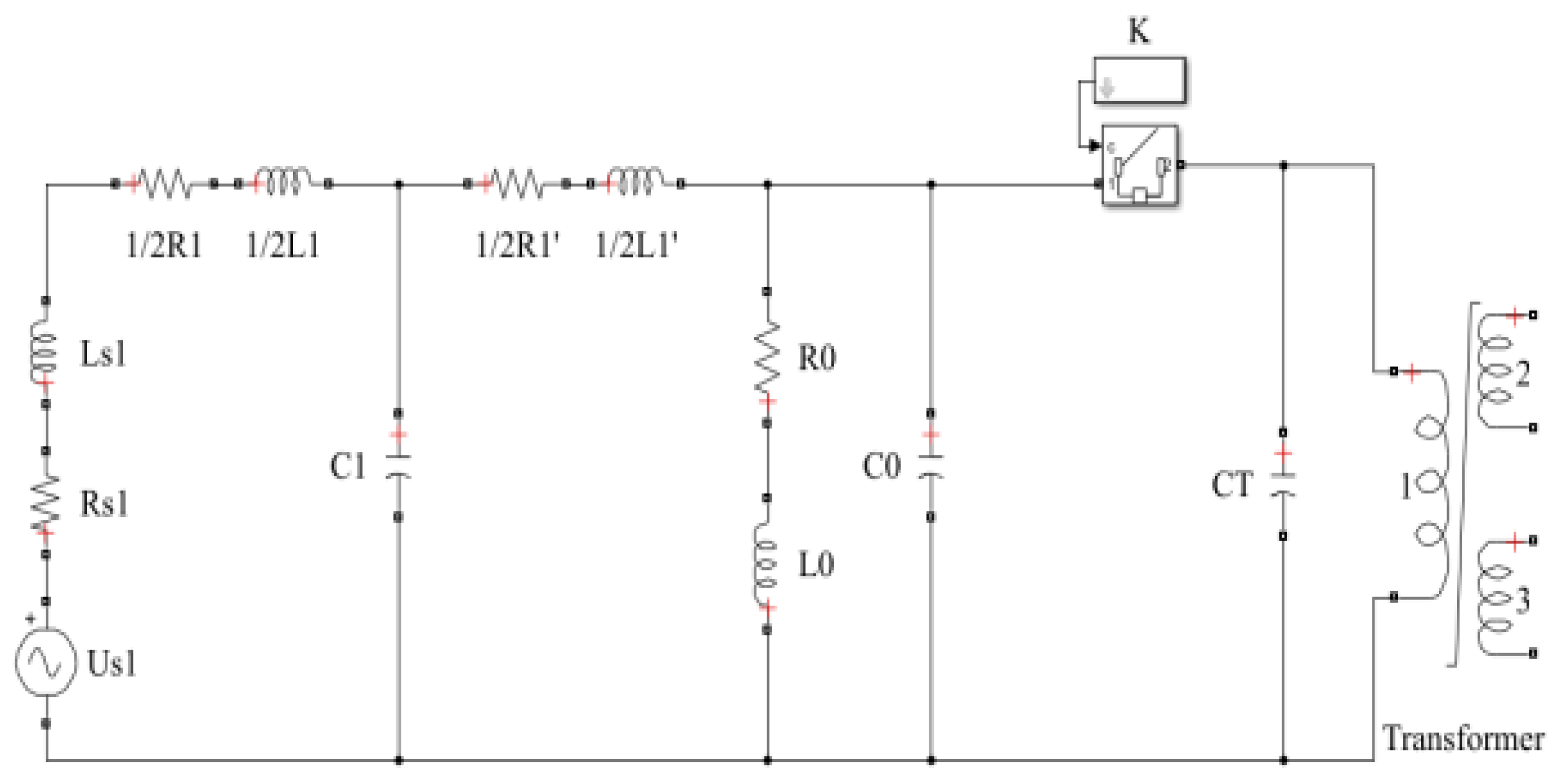
2.2. Simulation Model of SCES
2.2.1. Main Technical Parameters of the System
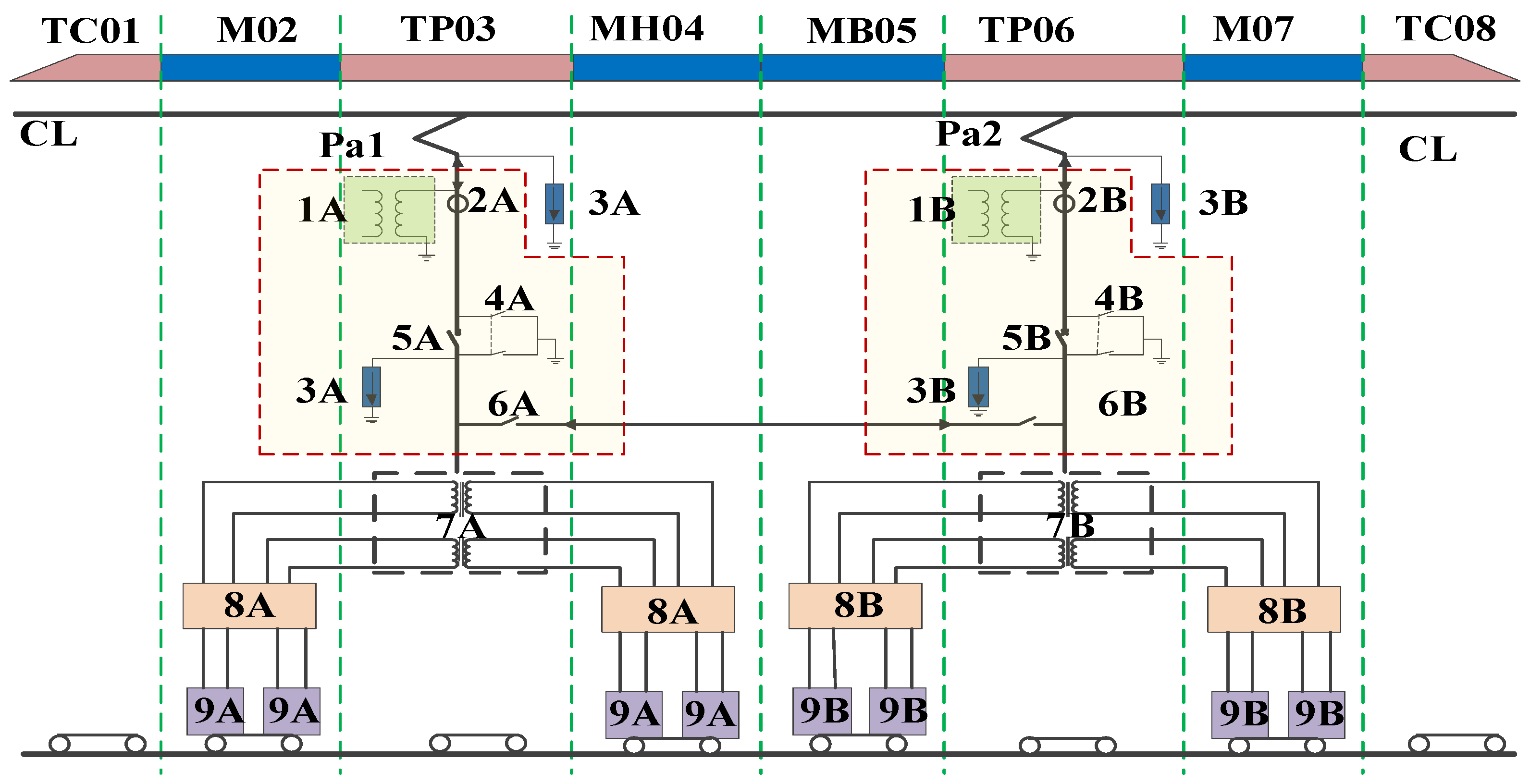
2.2.2. Catenary Module
2.2.3. Neutral-Zone Module
2.2.4. EMU Model
3. Simulation Analysis of Operating Overvoltage and Inrush Current of SCES
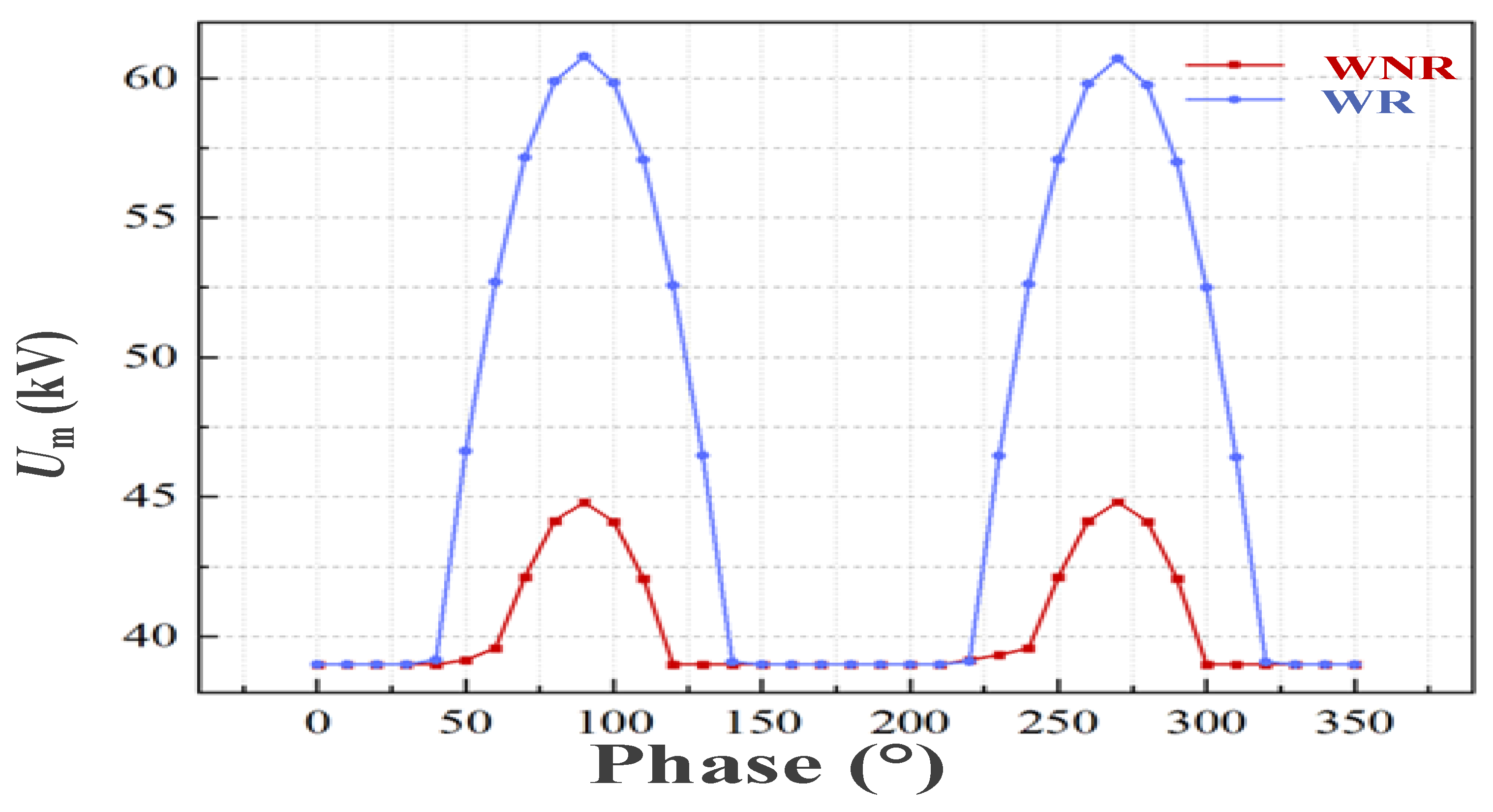
3.1. Overvoltage Characteristics
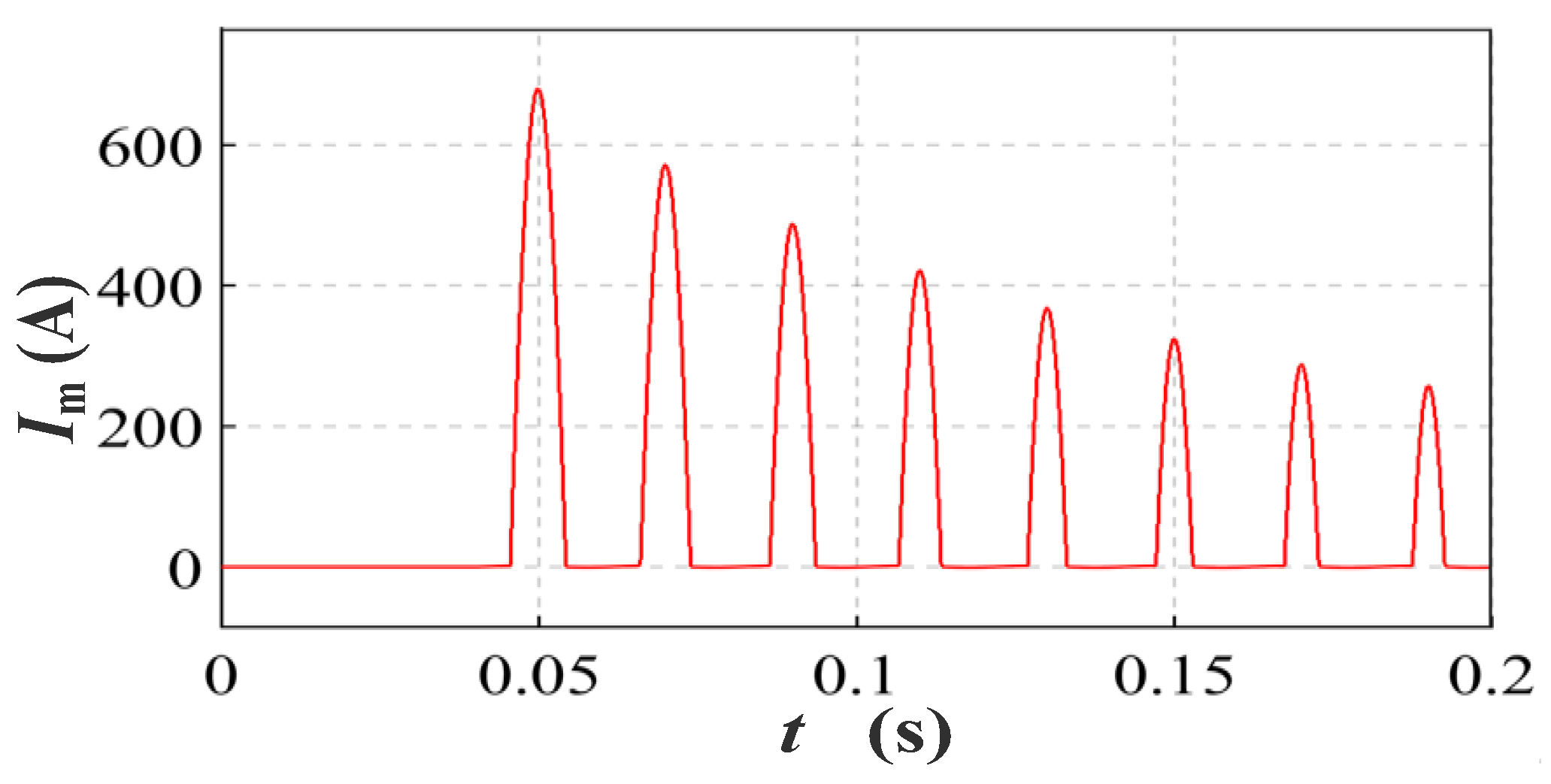
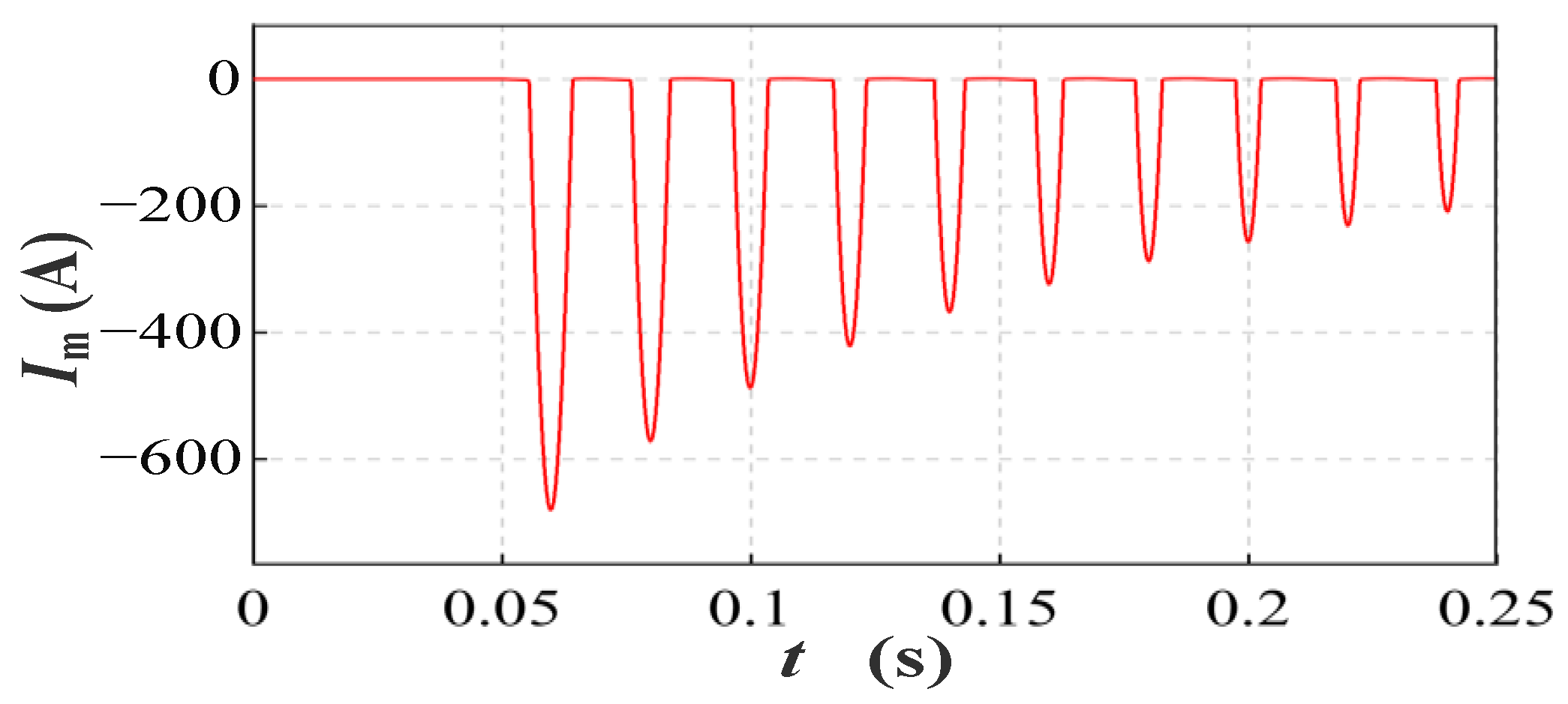
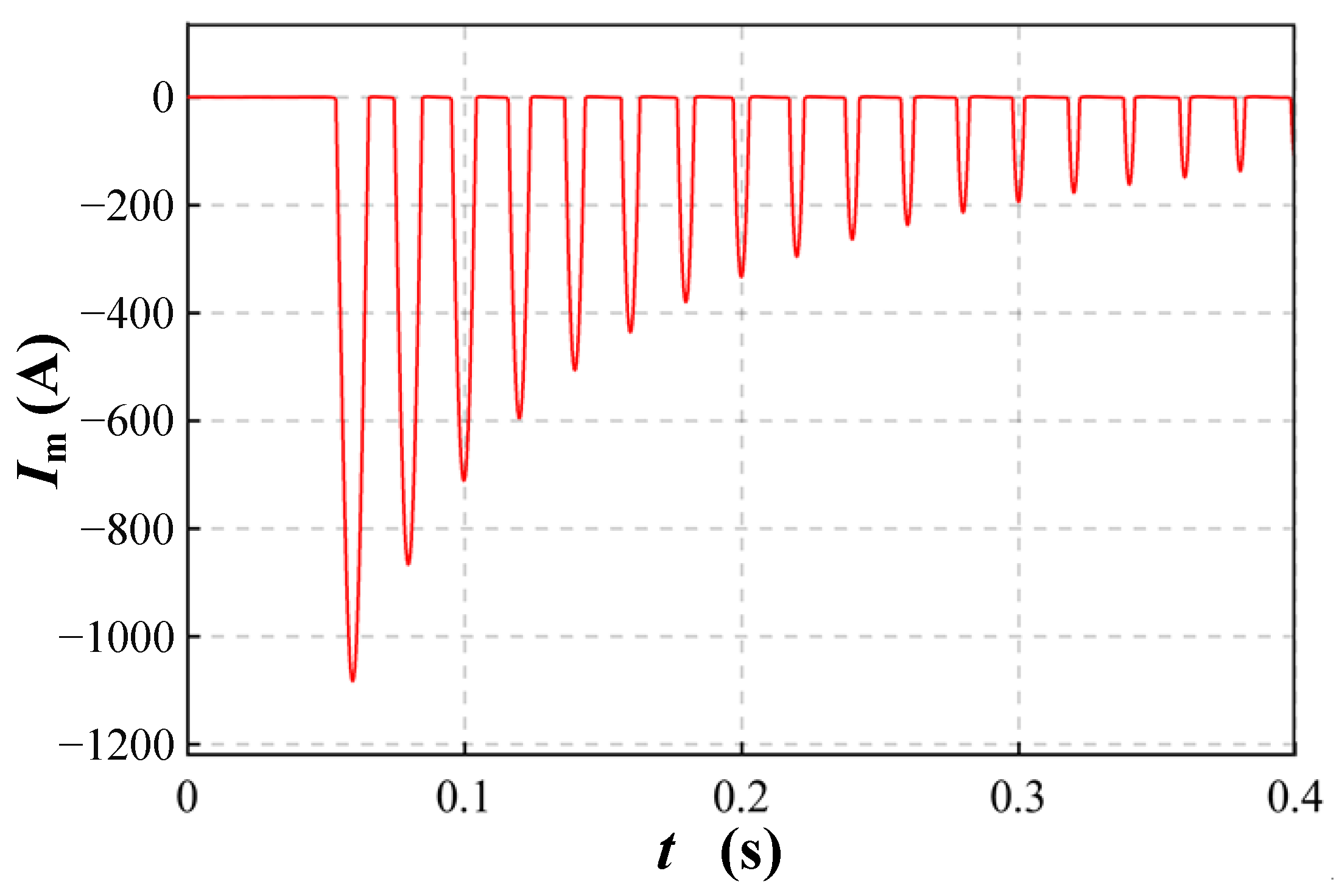
3.2. Inrush Current Characteristics of SCES
4. Operational Overvoltage Test of SCES
4.1. Test System
4.2. Test Process
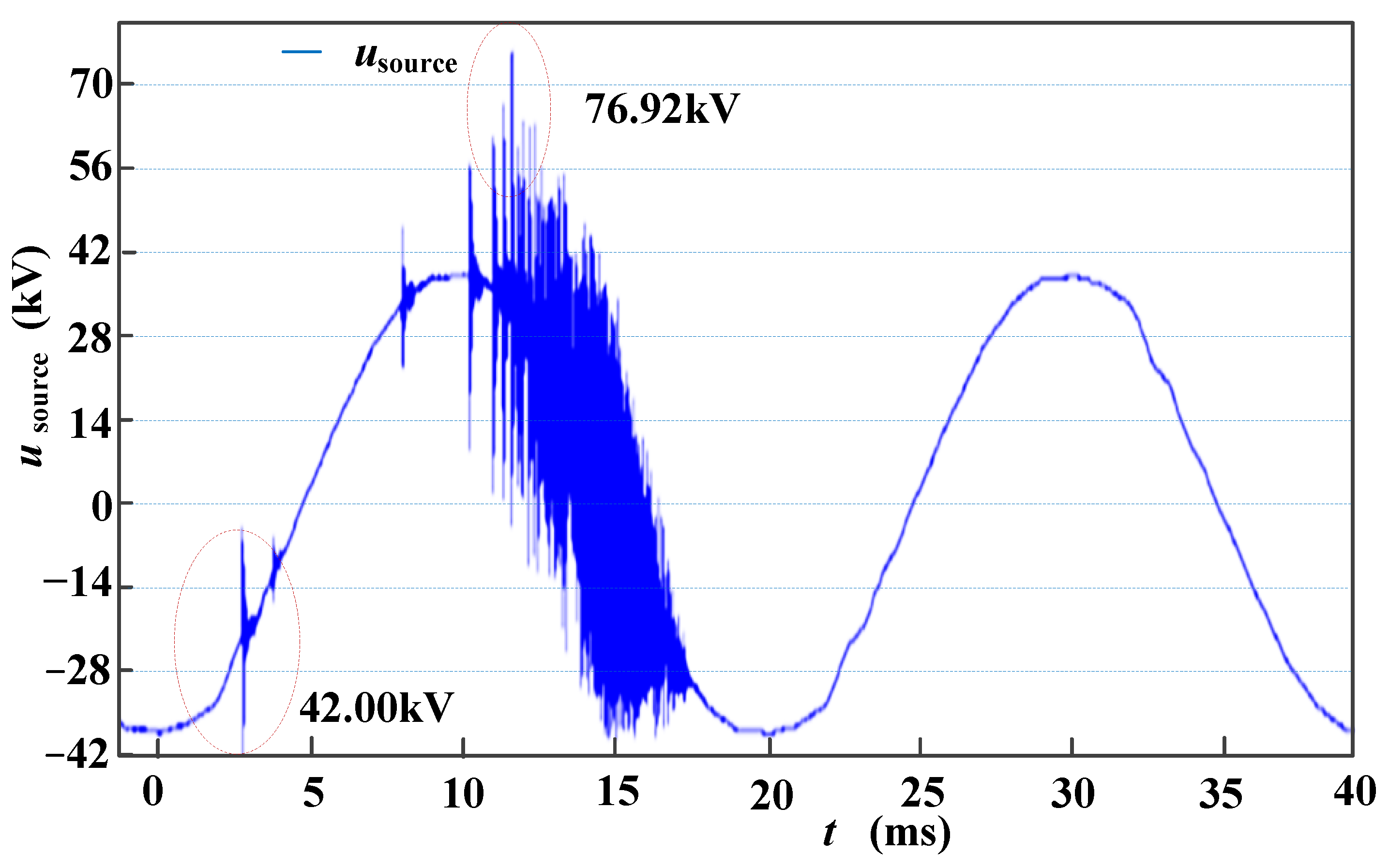
4.3. Overvoltage Characteristics
4.3.1. Closing Process
4.3.2. Opening Process
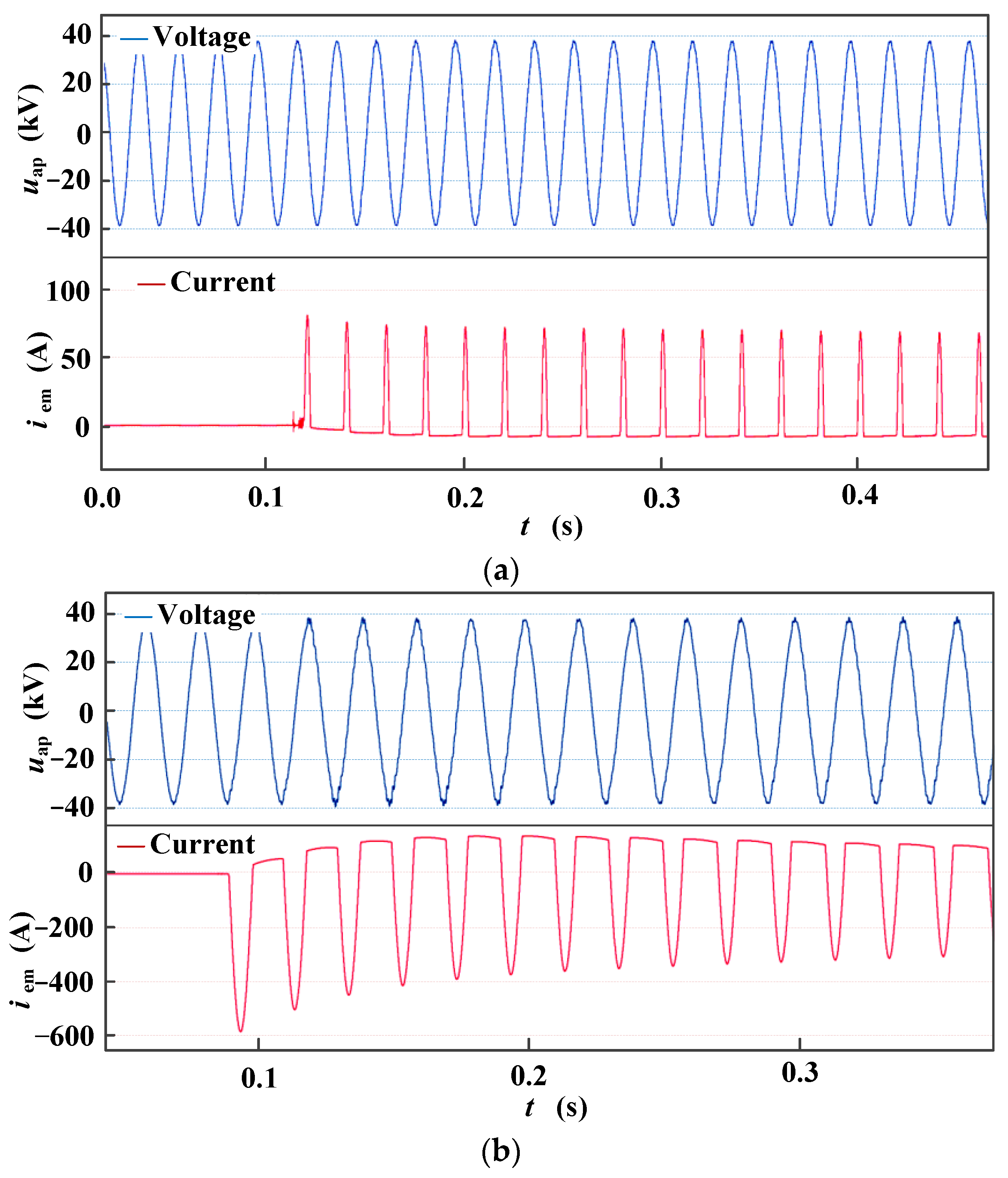
4.4. Inrush Current Characteristics
5. Discussion
6. Conclusions
- (1)
- The SCES generated overvoltage during the closing and opening process of the vehicle-mounted circuit breaker had large overvoltage amplitude. When the switch was closed at a phase angle of 90°, the overvoltage multiple was maximum. The overvoltage obtained in the test was approximately 65 kV, which caused the vehicle-mounted lightning arrester to operate. Meanwhile, overvoltage was in the steep amplitude, approximately 1.35 MV/s;
- (2)
- Under operating overvoltage conditions, the SCES generated magnetizing inrush currents. The inrush current value could reach 623 A with an inrush current steepness of approximately 174 kA/s, which endangered the operation safety of the vehicle-mounted winding electrical equipment;
- (3)
- Meanwhile, the residual magnetic characteristics of the vehicle-mounted transformer significantly affected the overvoltage analysis of SCES. The SCES produced multiple breakdowns due to the insulation between the contact surface and the internal circuit breaker, which affected the effectiveness of phase-controlled closing.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, J.; Ding, F.; Lv, Y.; Ren, J.; Song, S.; Li, T.; Zhi, Q.; Guo, C. Leakage current characteristics and ageing assessment technology of roof arrester under ultra harmonics overvoltage. High Volt. 2021, 7, 346–356. [Google Scholar] [CrossRef]
- IEC 60071-1 IEC; Insulation Co-Ordination Part 1: Definitions, Principles and Rules. IEC: Geneva, Switzerland, 2011.
- Alatawneh, N. Effects of cable insulations’ physical and geometrical parameters on sheath transients and insulation losses. Electr. Power Energy Syst. 2019, 110, 95–106. [Google Scholar] [CrossRef]
- Lafaia, I.; Mahseredjian, J.; Ametani, A.; de Barros, M.T.C.; Kocar, I.; Fillion, Y. Frequency and time domain responses of cross-bonded cables. IEEE Trans. Power Deliv. 2017, 33, 640–648. [Google Scholar] [CrossRef]
- Hosseini, S.H.; Baravati, P.R. New high frequency multi-conductor transmission line detailed model of transformer winding for PD study. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 316–323. [Google Scholar] [CrossRef]
- Theocharis, A.; Popov, M.; Seibold, R.; Voss, S.; Eiselt, M. Analysis of Switching Effects of Vacuum Circuit Breaker on Dry-Type Foil-Winding Transformers Validated by Experiments. IEEE Trans. Power Deliv. 2014, 30, 351–359. [Google Scholar] [CrossRef]
- Han, Z.; Liu, S.; Gao, S. An automatic system for China high-speed multiple unit train running through neutral section with electric load. In Proceedings of the Asia-Pacific Power and Energy Engineering Conference, Chengdu, China, 28–31 March 2010; pp. 1–3. [Google Scholar]
- Goertz, M.; Wenig, S.; Beckler, S.; Hirsching, C.; Suriyah, M.; Leibfried, T. Analysis of Cable Overvoltages in Symmetrical Monopolar and Rigid Bipolar HVDC Configuration. IEEE Trans. Power Deliv. 2019, 35, 2097–2107. [Google Scholar] [CrossRef]
- Yu, Y.; Li, G.; Geng, Y.; Wang, J.; Liu, Z. Prestrike Inrush Current Arc Behaviors in Vacuum Interrupters Subjected to a Transverse Magnetic Field and an Axial Magnetic Field. IEEE Trans. Plasma Sci. 2018, 46, 3075–3082. [Google Scholar] [CrossRef]
- Yang, H.; Geng, Y.; Liu, Z.; Zhang, Y.; Wang, J. Capacitive Switching of Vacuum Interrupters and Inrush Currents. IEEE Trans. Dielectr. Electr. Insul. 2014, 21, 159–170. [Google Scholar] [CrossRef]
- Budzisz, J.; Pierz, P. Transient Current and Voltage Waveforms When Switching on a Capacitive Circuit with a Vacuum Circuit Breaker. In Proceedings of the 2018 Progress in Applied Electrical Engineering (PAEE), Koscielisko, Poland, 18–22 June 2018. [Google Scholar]
- Khamlichi, A.; Donoso, G.; Garnacho, F.; Denche, G.; Valero, A.; Álvarez, F. Improved Cable Connection to Mitigate Transient Enclosure Voltages in 220-kV Gas-Insulated Substations. IEEE Trans. Ind. Appl. 2015, 52, 562–569. [Google Scholar] [CrossRef]
- Szewczyk, M.; Piasecki, W.; Wroński, M.; Kutorasiński, K. New Concept for VFTO Attenuation in GIS with Modified Disconnector Contact System. IEEE Trans. Power Deliv. 2015, 30, 2138–2145. [Google Scholar] [CrossRef]
- Guan, Y.; Yue, G.; Chen, W.; Li, Z.; Liu, W. Experimental Research on Suppressing VFTO in GIS by Magnetic Rings. IEEE Trans. Power Deliv. 2013, 28, 2558–2565. [Google Scholar] [CrossRef]
- Ferdinand, R.; Monti, A. Export Transformer Switching Transient Mitigation in HVDC Connected Offshore Wind Farms. IEEE Trans. Power Deliv. 2019, 35, 37–46. [Google Scholar] [CrossRef]
- Ghafourian, S.M.; Arana, I.; Holboll, J.; Sorensen, T.; Popov, M.; Terzija, V. General Analysis of Vacuum Circuit Breaker Switching Overvoltages in Offshore Wind Farms. IEEE Trans. Power Deliv. 2016, 31, 2351–2359. [Google Scholar] [CrossRef]
- Cardelli, E.; Faba, A.; Tissi, F. Prediction and Control of Transformer Inrush Currents. IEEE Trans. Magn. 2015, 51, 8400304. [Google Scholar] [CrossRef]
- Elizondo, M.A.; Tuffner, F.K.; Schneider, K.P. Simulation of Inrush Dynamics for Unbalanced Distribution Systems Using Dynamic-Phasor Models. IEEE Trans. Power Syst. 2016, 32, 633–642. [Google Scholar] [CrossRef]
- Abdulahović, T.; Thiringer, T. Voltage stress in a transformer winding during very fast transients caused by breaker closing event. IEEE Trans. Power Deliv. 2014, 29, 1946–1954. [Google Scholar] [CrossRef]
- Kuczek, T.; Florkowski, M.; Piasecki, W. Transformer Switching with Vacuum Circuit Breaker: Case Study of PV Inverter LC Filters Impact on Transient Overvoltages. IEEE Trans. Power Deliv. 2016, 31, 44–49. [Google Scholar] [CrossRef]
- Moradnouri, A.; Vakilian, M.; Hekmati, A.; Fardmanesh, M. Multi-segment Winding Application for Axial Short Circuit Force Reduction under Tap Changer Operation in HTS Transformers. J. Supercond. Nov. Magn. 2019, 32, 3171–3182. [Google Scholar] [CrossRef]
- Moradnouri, A.; Vakilian, M.; Hekmati, A.; Fardmanesh, M. HTS transformers leakage flux and short circuit force mitigation through optimal design of auxiliary windings. Cryogenics 2020, 110, 103148. [Google Scholar] [CrossRef]
- Shipp, D.D.; Dionise, T.J.; Lorch, V.; MacFarlane, W.G. Vacuum circuit breaker transients during switching of an LMF transformer. IEEE Trans. Ind. Appl. 2012, 48, 37–44. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, S.; Sun, L.; Mao, C.; Pu, L.; Zhang, Q. Prediction model of voltage–time characteristics for SF6 long gap under VFTO and lightning impulse voltage. IET Gener. Transm. Distrib. 2018, 12, 880–885. [Google Scholar] [CrossRef]
- Berger, M.; Grave, J.-P.M.; Lavertu, C.; Kocar, I.; Mahseredjian, J.; Ferrara, D. Modeling, Simulation, and Testing of Switching Surge Transients in Rapid Transit Vehicles DC Power Systems. IEEE Trans. Ind. Appl. 2017, 54, 822–831. [Google Scholar] [CrossRef]
- Yu, L. Quick Evaluation of Voltage Surge in Electrical Power Systems. IEEE Trans. Ind. Appl. 1995, 31, 379–383. [Google Scholar]
- Sun, J.; Sun, L.; Chen, W.; Li, Z.; Yan, X.; Xu, Y. Metal particle movement and distribution characteristics under AC voltage and ball-plane electrodes. High Volt. 2019, 4, 138–143. [Google Scholar] [CrossRef]
- Szewczyk, M.; Kutorasinski, K.; Wronski, M.; Florkowski, M. Full-Maxwell simulations of very fast transients in GIS: Case study to compare 3-D and 2-D-axisymmetric models of 1 100 kV test setup. IEEE Trans. Power Deliv. 2016, 32, 733–739. [Google Scholar] [CrossRef]
- Saathoff, E.K.; Green, D.H.; Agustin, R.A.; O’Connell, J.W.; Leeb, S.B. Inrush Current Measurement for Transient Space Characterization and Fault Detection. IEEE Trans. Instrum. Meas. 2021, 70, 3520410–3520419. [Google Scholar] [CrossRef]
- Cervantes, M.; Ametani, A.; Martin, C.; Kocar, I.; Montenegro, A.; Goldsworthy, D.; Tobin, T.; Mahseredjian, J.; Ramos, R.; Marti, J.R.; et al. Simulation of Switching Overvoltages and Validation with Field Tests. IEEE Trans. Power Deliv. 2018, 33, 2884–2893. [Google Scholar] [CrossRef]
- Yang, Q.; Chen, S.; Zeng, X.; Wei, G.; Liu, H.; Chen, T. Suppression Measures for Overvoltage Caused by Vacuum Circuit Breaker Switching Off 10-kV Shunt Reactor. IEEE Trans. Power Deliv. 2019, 35, 540–548. [Google Scholar] [CrossRef]
- Jacobson, D.A.N. Examples of ferromagnetic resonance in a high voltage power system. In Proceedings of the Power Engineering Society General Meeting, Toronto, ON, Canada, 13–17 July 2003; IEEE: Manhattan, NY, USA, 2003; pp. 37–40. [Google Scholar]
- Sun, J.; Song, S.; Zheng, J.; Li, Z.; Huo, J.; Wang, Y.; Xiao, P.; Akram, S.; Qin, D. Review on Surface Flashover Phenomena at DC Voltage in Vacuum and Compressed Gas. IEEE Trans. Dielectr. Electr. Insul. 2022, 29, 1–14. [Google Scholar] [CrossRef]
- Sun, J.; Lv, Y.; Ding, F.; Liu, J.; Zhi, Q.; Song, S.; Wen, H. A testing method with steep impact voltage inspecting the internal defects in EMU roof cable termination. IET Sci. Meas. Technol. 2022, 16, 149–159. [Google Scholar] [CrossRef]
- Smith, K.; Ran, L.; Leyman, B. Analysis of transformer inrush transients in offshore electrical systems. IEE Proc. Gener. Transm. Distrib. 1999, 146, 89–95. [Google Scholar] [CrossRef]
- Brunke, J.H.; Frohlich, K.J. Elimination of Transformer Inrush Currents by Controlled Switching, part I: Theoretical Considerations. IEEE Trans. Power Deliv. 2001, 16, 276–290. [Google Scholar] [CrossRef]
- Gray, E.; Uhrig, T. Voltage Brealkdon Testing of Relays in the 1000-V Range. IEEE Trans. Compon. Hybrids Manuf. Technol. 1980, 3, 442–448. [Google Scholar] [CrossRef]
- Gray, E.W.; Harrington, D.J. Surface Topography of Printed Wiring Boards and Its Effect on Flashover. IEEE Trans. Compon. Hybrids Manuf. Technol. 1982, 5, 142–146. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated voltage (kV) | Rated capacity (MVA) | No-load current (%) |
| 110/27.5 | 50 | 2 |
| Loss with no-load (kW) | Short circuit loss (kW) | Short circuit voltage (%) |
| 25 | 132 | 8.4 |
| Designation | Quantity | Remark |
|---|---|---|
| Overvoltage recorder | 1 | Um100 kV, 1 MHz, 1%, |
| Capacitive voltage divider | 2 | 0–35 kV, 1 247.2/1, ±1% |
| Voltage probe | 4 | 100 V/2 V, 1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Hu, K.; Fan, Y.; Liu, J.; Yan, S.; Zhang, Y. Modeling and Experimental Analysis of Overvoltage and Inrush Current Characteristics of the Electric Rail Traction Power Supply System. Energies 2022, 15, 9308. https://doi.org/10.3390/en15249308
Sun J, Hu K, Fan Y, Liu J, Yan S, Zhang Y. Modeling and Experimental Analysis of Overvoltage and Inrush Current Characteristics of the Electric Rail Traction Power Supply System. Energies. 2022; 15(24):9308. https://doi.org/10.3390/en15249308
Chicago/Turabian StyleSun, Jixing, Kaixuan Hu, Yongzhi Fan, Jiyong Liu, Shengchun Yan, and Yan Zhang. 2022. "Modeling and Experimental Analysis of Overvoltage and Inrush Current Characteristics of the Electric Rail Traction Power Supply System" Energies 15, no. 24: 9308. https://doi.org/10.3390/en15249308