
Thermal Analysis of Dual-Axis-Direction Hybrid Excitation Generator for Electric Vehicles



Abstract
:1. Introduction
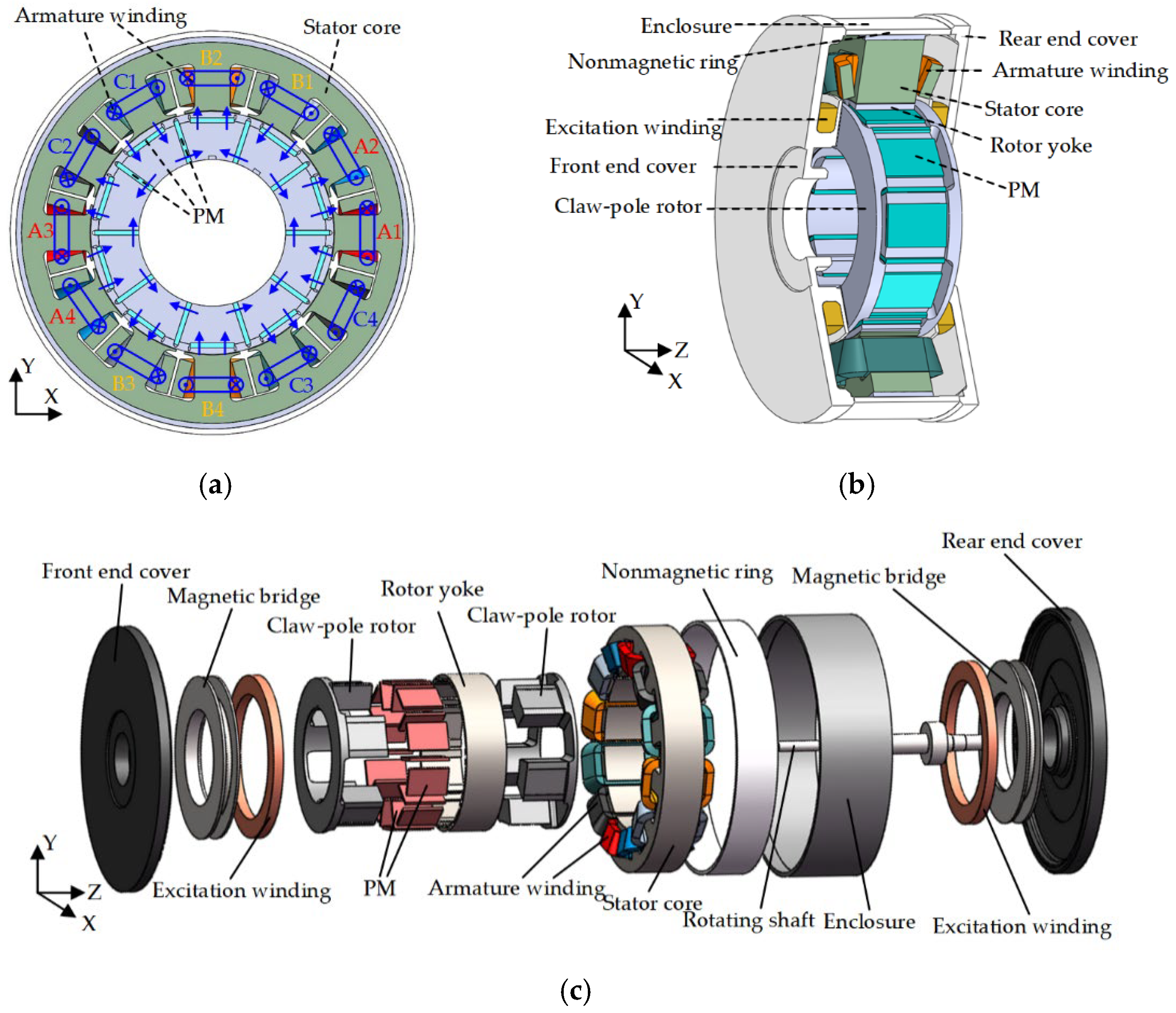
2. Machine Configuration and Parameters
3. Thermal Analysis Modeling
3.1. Basic Law of Heat Transfer
3.1.1. Heat Conduction
3.1.2. Heat Convection
3.2. Establishment of 3D Equivalent Thermal Network Model
- The heat source loss of each component in DHEG is evenly distributed;
- Ignoring the skin effect in DHEG;
- The DHEG is symmetrical along the center line of the rotating shaft, and the calculation area of the internal temperature field is also symmetrical;
- The heat conduction coefficient and temperature of the air inside DHEG are the same;
- For the components of hollow cylinder in DHEG, only axial and radial heat transfer is considered, the circumferential heat transfer is not considered.
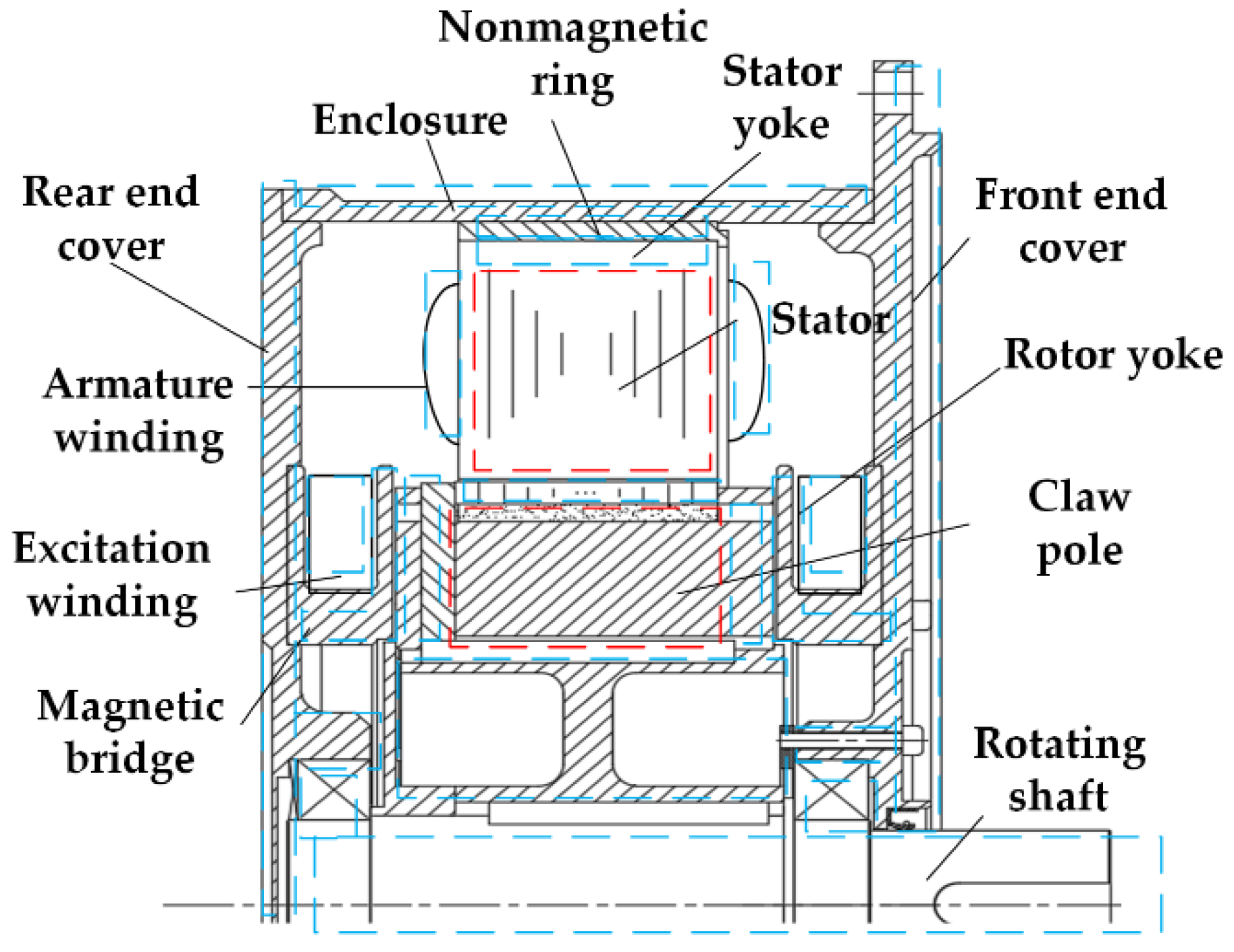
3.2.1. Solving Region Division
3.2.2. Calculation of Thermal Resistance in Solving Region
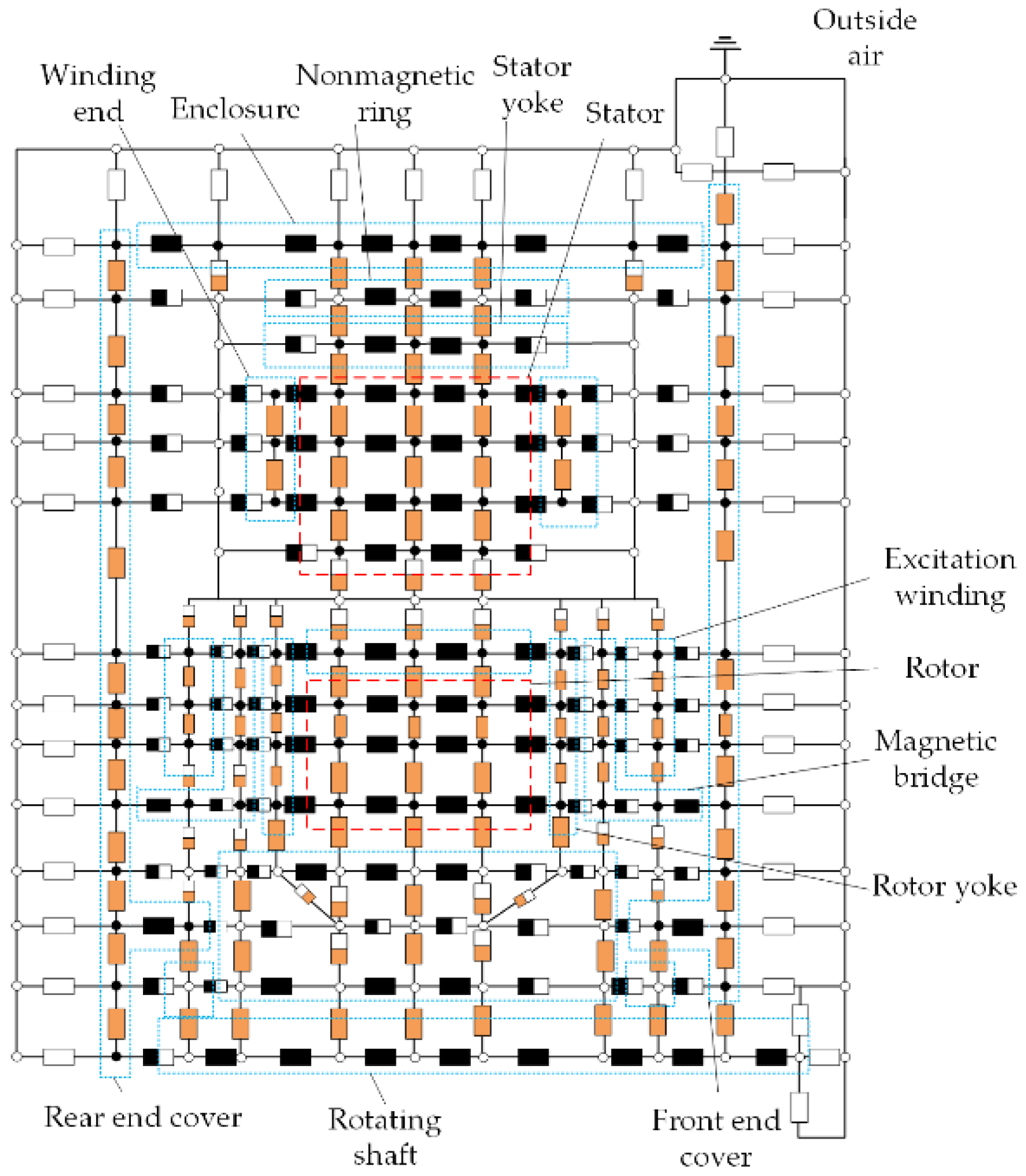
3.2.3. Establishment of Thermal Network Model
3.3. Solution of 3D Equivalent Thermal Network Model
3.3.1. Calculation of Thermal Conductivity and Heat Dissipation Coefficient
- (1)
- Thermal conductivity of stator and rotor cores
- (2)
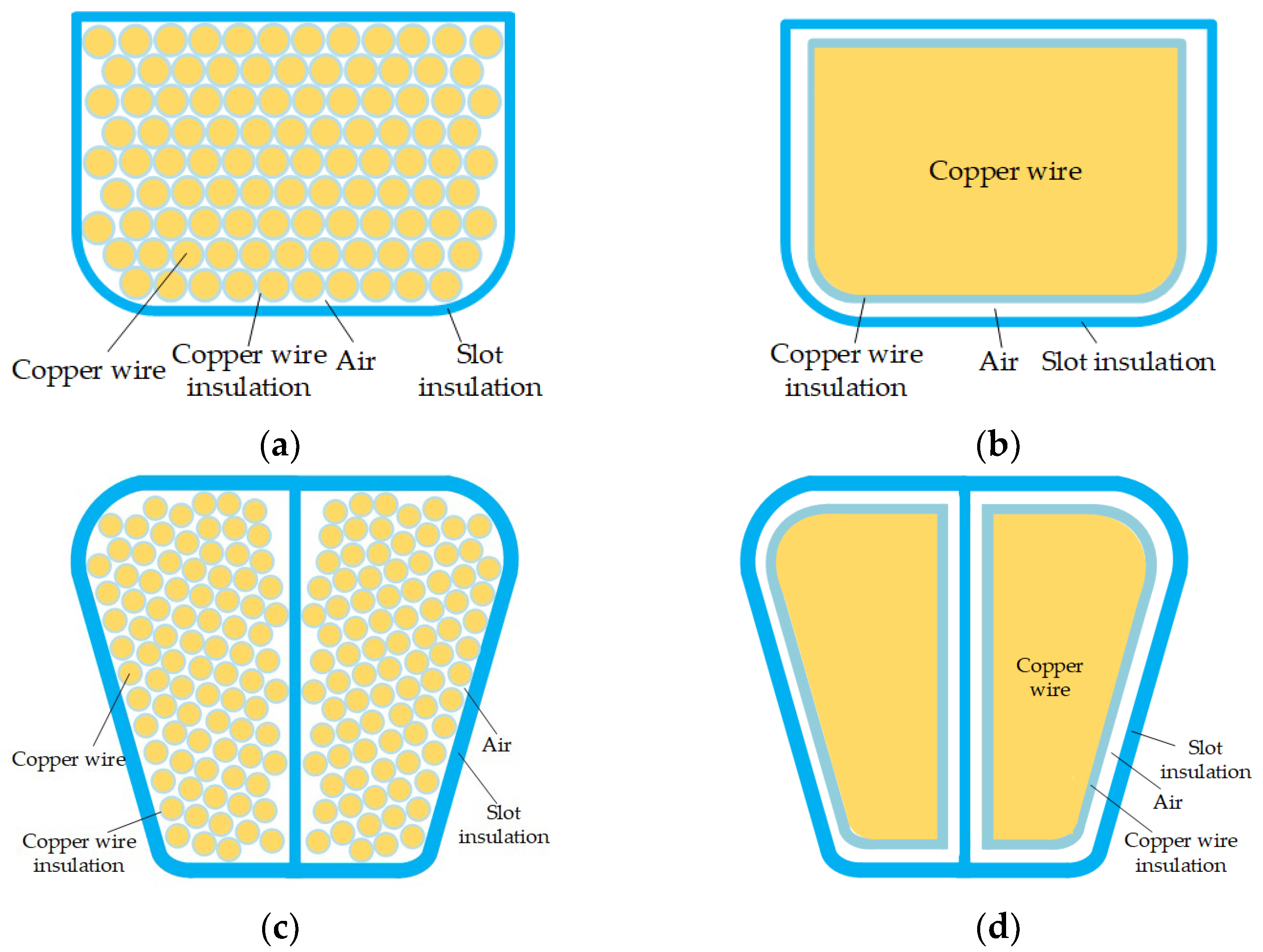
- Thermal conductivity of winding
- (3)
- Equivalent thermal conductivity of air gap
- (4)
- Determination of heat dissipation coefficient
- (5)
- Determination of heat capacity coefficient
3.3.2. Heat Balance Equation
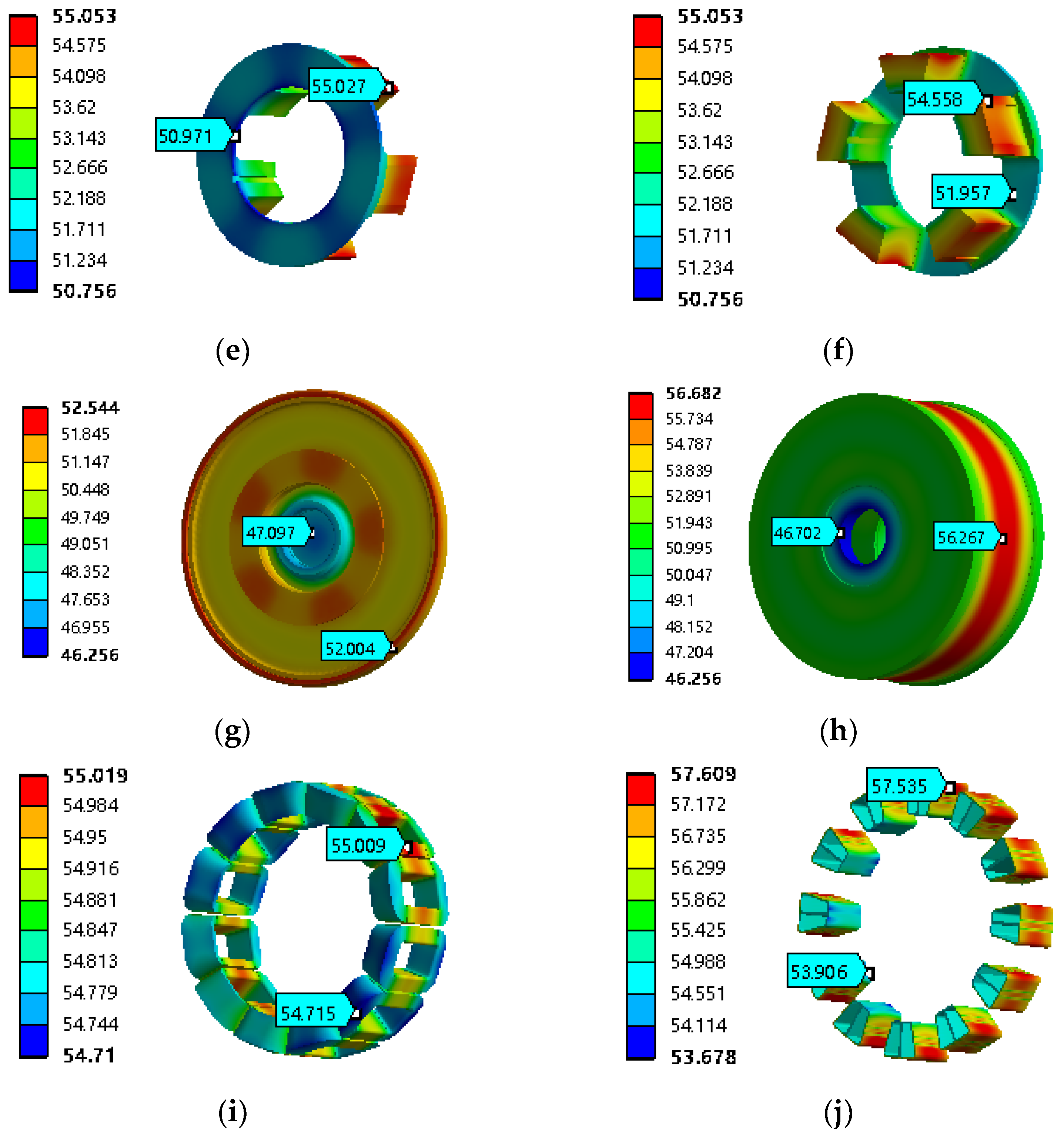
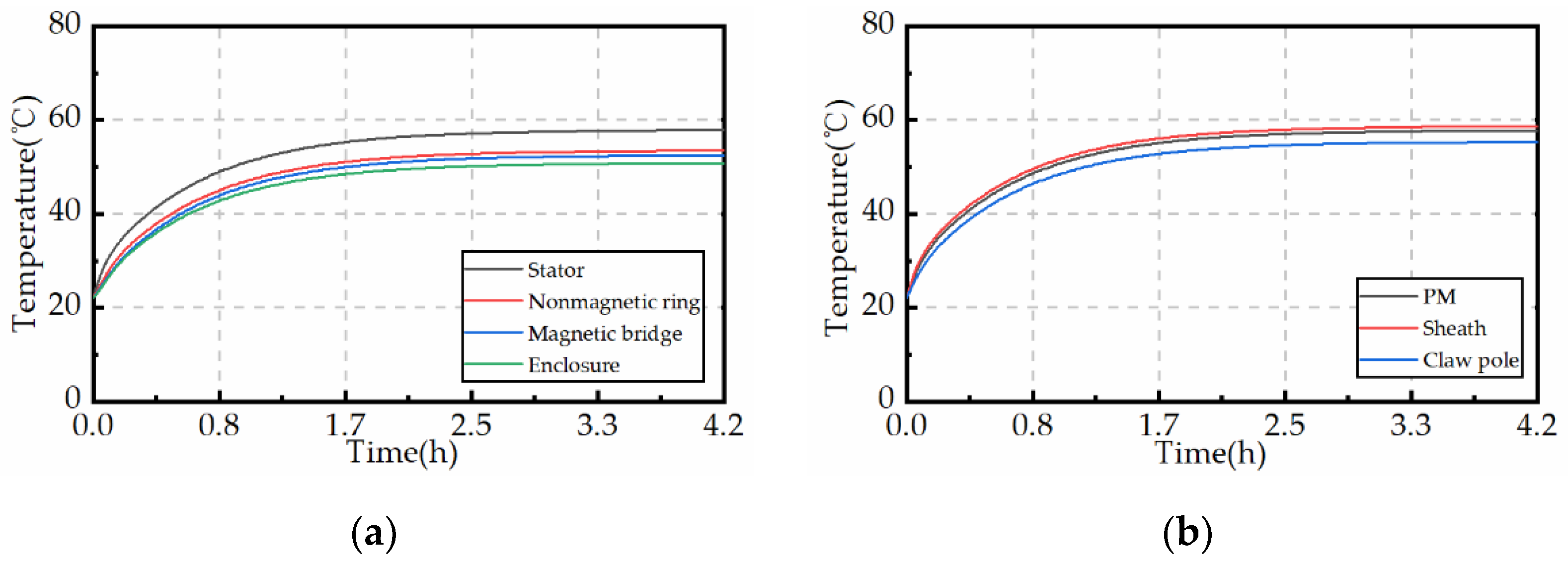
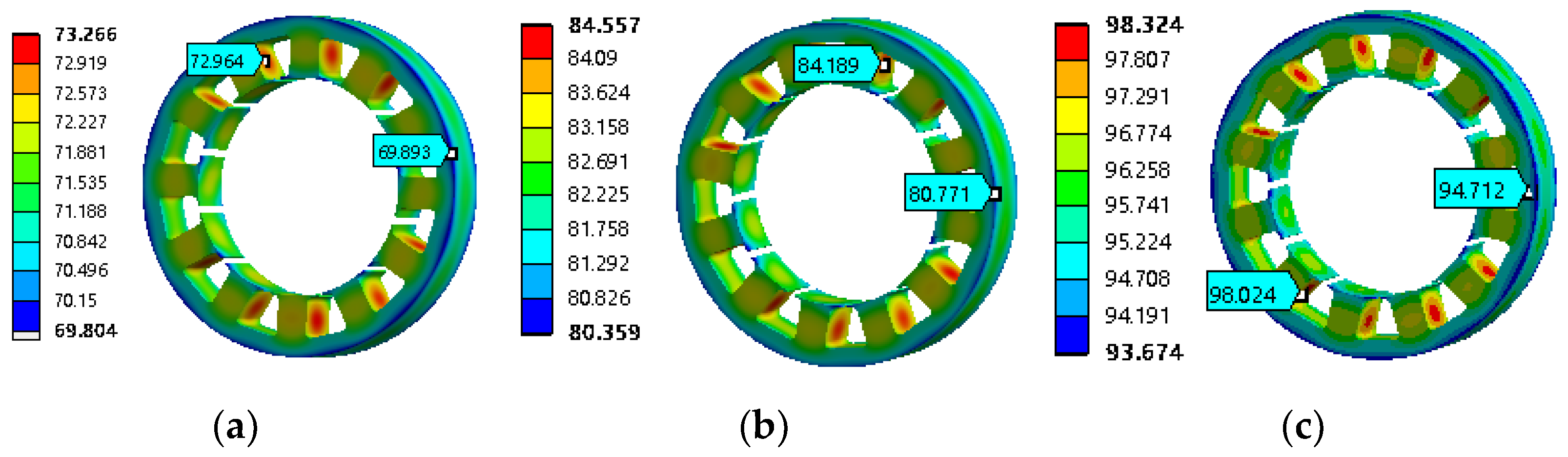
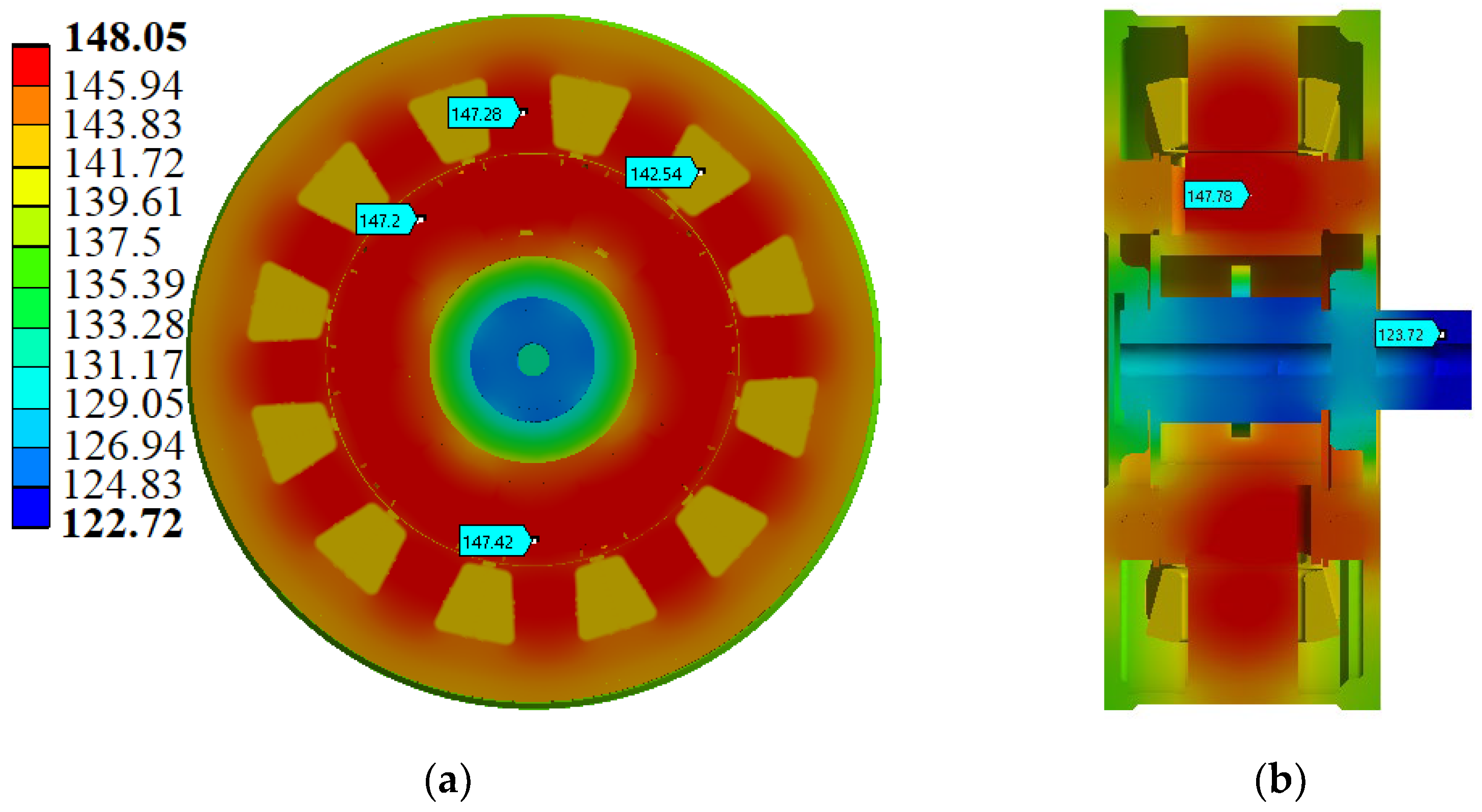
3.3.3. Temperature Distribution of DHEG
3.4. 3D FEA Temperature Field Calculation
- (1)
- The thermal conductivity and heat dissipation coefficient of DHEG material do not change with the change of temperature.
- (2)
- The initial temperature of DHEG is the same as the ambient temperature.
- (3)
- There is no temperature difference between the windings, the winding is calculated as one heat conductor, and the insulation between the windings is calculated as another heat conductor.
- (4)
- The heat dissipation on the stator surface, enclosure surface, and rotor surface is uniform, so the heat dissipation coefficient can be taken as their average value.
3.4.1. Establishment of 3D FEA Thermal Model
3.4.2. Temperature Field Distribution of DHEG under Natural Cooling Condition
3.4.3. Comparison of Temperature Field Simulation Results
3.4.4. Experimental Results of Temperature Field
3.5. Effect of Heat Dissipation Rib on DHEG
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Martinez-Munoz, D.; Alakula, M. Comparison between a Novel Claw-Pole Electrically Magnetized Synchronous Machine without Slip-Rings and a Permanent Magnet Machine. In Proceedings of the IEEE International Electric Machines and Drives Conference, IEEE IEMDC, Madison, WI, USA, 1–4 June 2003; pp. 1351–1356. [Google Scholar]
- Liu, Y.; Zhang, Z.; Wang, C.; Gao, H. Optimization and Performance Improvement of a Hybrid Excitation Synchronous Machine with Modular Magnetic-Shunting Rotor. IEEE Trans. Ind. Electron. 2020, 67, 4381–4390. [Google Scholar] [CrossRef]
- Shi, Z.; Sun, X.; Cai, Y.; Yang, Z.; Lei, G.; Guo, Y.; Zhu, J. Torque Analysis and Dynamic Performance Improvement of a PMSM for EVs by Skew Angle Optimization. IEEE Trans. Appl. Superconduct. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Huang, Y.; Zhu, J.; Guo, Y.; Hu, Q. Development of a High-Speed Claw Pole Motor with Soft Magnetic Composite Core. In Proceedings of the 2007 IEEE International Electric Machines & Drives Conference, Antalya, Turkey, 3–5 May 2007; pp. 1564–1568. [Google Scholar]
- Rebhi, R.; Ibala, A.; Masmoudi, A. MEC-Based Sizing of a Hybrid-Excited Claw Pole Generator. IEEE Trans. Ind. Appl. 2015, 51, 211–223. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.; Chen, J.; Jin, J. Performance Analysis of a PM Claw Pole SMC Motor with Brushless DC Control Scheme. In Proceedings of the 2006 CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, China, 14–16 August 2006; pp. 1–5. [Google Scholar]
- Sun, X.; Hu, C.; Lei, G.; Guo, Y.; Zhu, J. State Feedback Control for a PM Hub Motor Based on Gray Wolf Optimization Algorithm. IEEE Trans. Power Electron. 2020, 35, 1136–1146. [Google Scholar] [CrossRef]
- Leitner, S.; Kulterer, T.; Gruebler, H.; Muetze, A. Characterization of the Thermal Performances of Low-Cost Sub-Fractional Horsepower BLDC Claw-Pole Motor Designs. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 4269–4275. [Google Scholar]
- Xu, L.; Zhu, X.; Fan, W.; Zhang, C.; Zhang, L.; Quan, L. Comparative Analysis and Design of Partitioned Stator Hybrid Excitation Axial Flux Switching PM Motors for In-Wheel Traction Applications. IEEE Trans. Energy Convers. 2021, accepted. [Google Scholar] [CrossRef]
- Liang, J.; Parsapour, A.; Cosoroaba, E.; Wu, M.; Boldea, I.; Fahimi, B. A High Torque Density Outer Rotor Claw Pole Stator Permanent Magnet Synchronous Motor. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 389–393. [Google Scholar]
- Ni, S.; Zhou, L.; Li, H.; Cao, R. Thermal Analysis of a Hybride Excitation Flux-Switching Motor with Water-Cooling System. In Proceedings of the 2021 IEEE 4th Student Conference on Electric Machines and Systems (SCEMS), Huzhou, China, 1–3 December 2021; pp. 1–5. [Google Scholar]
- Wang, C.; Zhang, Z.; Liu, Y.; Gao, H. Mechanical Design and Analysis of a High-Torque Modular Hybrid Excitation Synchronous Machine for Electric Vehicle Propulsion Applications. IEEE Trans. Veh. Technol. 2020, 69, 9624–9633. [Google Scholar] [CrossRef]
- Darabi, A.; Sarreshtehdari, A.; Tahanian, H. Design of the forced water cooling system for a claw pole transverse flux permanent magnet synchronous motor. In Proceedings of the 2013 21st Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 14–16 May 2013; pp. 1–5. [Google Scholar]
- Li, M.; An, Y.; Zhang, Z. Improving Thermal Analysis Accuracy of LPTN for Vehicle Claw-Pole Alternator by Calibrating Forced Convection Coefficients Based on Experimental Results. IEEE Access 2019, 7, 129327–129334. [Google Scholar] [CrossRef]
- Tan-Kim, A.; Lanfranchi, V.; Legranger, J.; Palleschi, F.; Redon, M. Influence of temperature on the vibro-acoustic behavior of claw-pole alternators. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 1628–1634. [Google Scholar]
- Liu, C.; Wang, X.; Wang, S.; Wang, Y.; Lei, G.; Zhu, J. Magnetothermal Coupling Analysis of Permanent Magnet Claw Pole Machine Using Combined 3D Magnetic and Thermal Network Method. IEEE Trans. Appl. Superconduct. 2022, 32, 1–5. [Google Scholar] [CrossRef]
- Liu, W.; Xing, W.; Guo, H. Thermal model identification of a claw pole generator by a method combining FEM with experiment. In Proceedings of the 2013 International Conference on Electrical Machines and Systems (ICEMS), Busan, Korea, 26–29 October 2013; pp. 738–742. [Google Scholar]
- Rakotovao, M. Modeling approach for system analysis: Case of claw pole machine in mild hybrid system. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 818–822. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Stator outer diameter | 312 mm |
| Stator inner diameter | 200 mm |
| Effective core length | 52 mm |
| Rotor outer diameter | 198.8 mm |
| Rotor inner diameter | 120 mm |
| Winding factor | 0.966 |
| Number of slots | 12 |
| Stacking factor | 0.9 |
| Armature winding turns | 210 |
| Stator yoke width | 17 mm |
| Stator tooth width | 28.28 mm |
| PM length | 53 mm |
| Material | Density (kg/m3) | Specific Heat Capacity (J/kg·K) | Thermal Conductivity (W/(m·K)) |
|---|---|---|---|
| 20# steel | 7850 | 452 | 67.5 |
| Silicon steel sheets | 7800 | 450 | 70 |
| Aluminum | 2689 | 951 | 237.5 |
| Copper | 8900 | 390 | 386 |
| Insulating material | 1700 | 1340 | 0.3 |
| PM | 8300 | 544 | 10 |
| Air | 1.29 | 1004 | 0.026 |
| Position | Average Temperature (°C) | Error (%) | |
|---|---|---|---|
| LPTN | FEA | ||
| Stator yoke | 103.4 | 94.8 | 9.1 |
| Stator teeth | 104.1 | 96.5 | 7.9 |
| Armature winding | 95.8 | 92.3 | 3.8 |
| Winding insulation | 96 | 93.9 | 2.2 |
| Rotor yoke | 99.1 | 96.6 | 2.6 |
| PM | 101.6 | 97.1 | 4.6 |
| Claw pole | 100.3 | 96.1 | 4.4 |
| Excitation winding | 98.2 | 95.1 | 3.3 |
| Magnetic bridge | 96.4 | 94.2 | 2.3 |
| End cover | 92.5 | 89.6 | 3.2 |
| Nonmagnetic ring | 102.1 | 93.4 | 9.3 |
| Enclosure | 97.5 | 91.2 | 6.9 |
| Conditions | Average Temperature (°C) | ||
|---|---|---|---|
| LPTN | FEA | Experiment | |
| Ambient temperature | 25 | 25 | 15 |
| Excitation current is 1 A | 61.2 | 59.7 | 41.2 |
| Excitation current is 4 A | 81.5 | 80.1 | 67.7 |
| LPTN | FEA | |
|---|---|---|
| Calculation time | 25 s | 30 min |
| Calculation error | 5.6% | 3.5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Zhu, S.; Yu, J.; Liu, C. Thermal Analysis of Dual-Axis-Direction Hybrid Excitation Generator for Electric Vehicles. Energies 2022, 15, 3011. https://doi.org/10.3390/en15093011
Cao Y, Zhu S, Yu J, Liu C. Thermal Analysis of Dual-Axis-Direction Hybrid Excitation Generator for Electric Vehicles. Energies. 2022; 15(9):3011. https://doi.org/10.3390/en15093011
Chicago/Turabian StyleCao, Yu, Shushu Zhu, Junyue Yu, and Chuang Liu. 2022. "Thermal Analysis of Dual-Axis-Direction Hybrid Excitation Generator for Electric Vehicles" Energies 15, no. 9: 3011. https://doi.org/10.3390/en15093011