
Energy Balance Control for Improving Transient Performance of DC Bus Voltage in Power Electronic Transformer for the Voltage-Sensitive Loads


Abstract
:1. Introduction
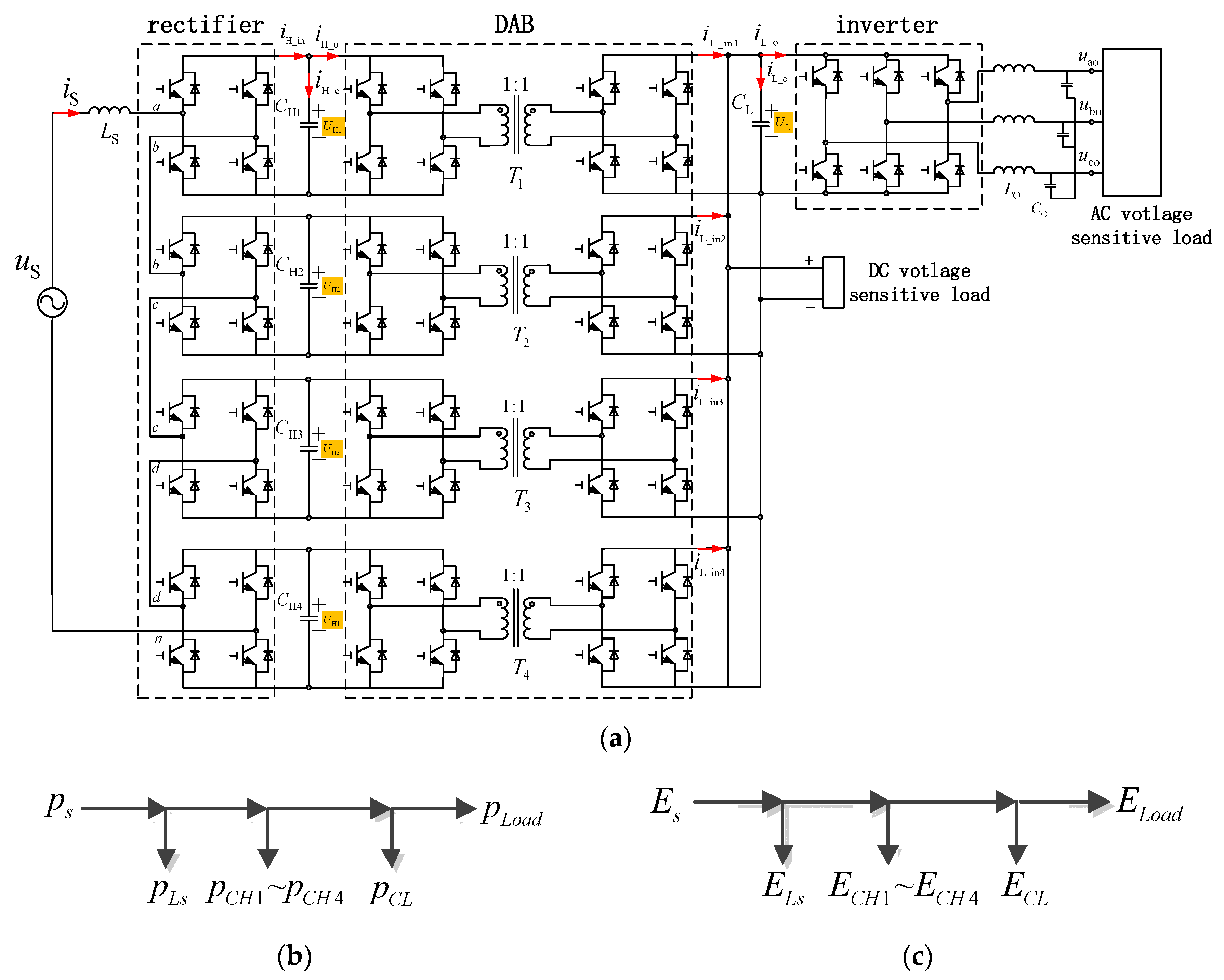
2. Mathematical Model of the PET
3. Energy Balance Control for LDB Voltage
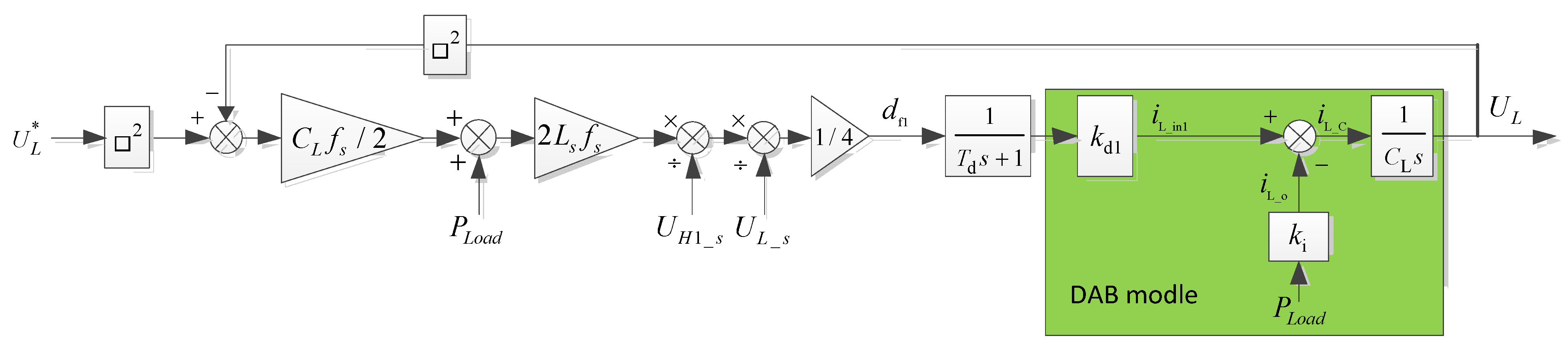
3.1. Energy Balance Control Scheme for DAB
3.2. Small-Signal Analysis
3.3. Stability Analysis
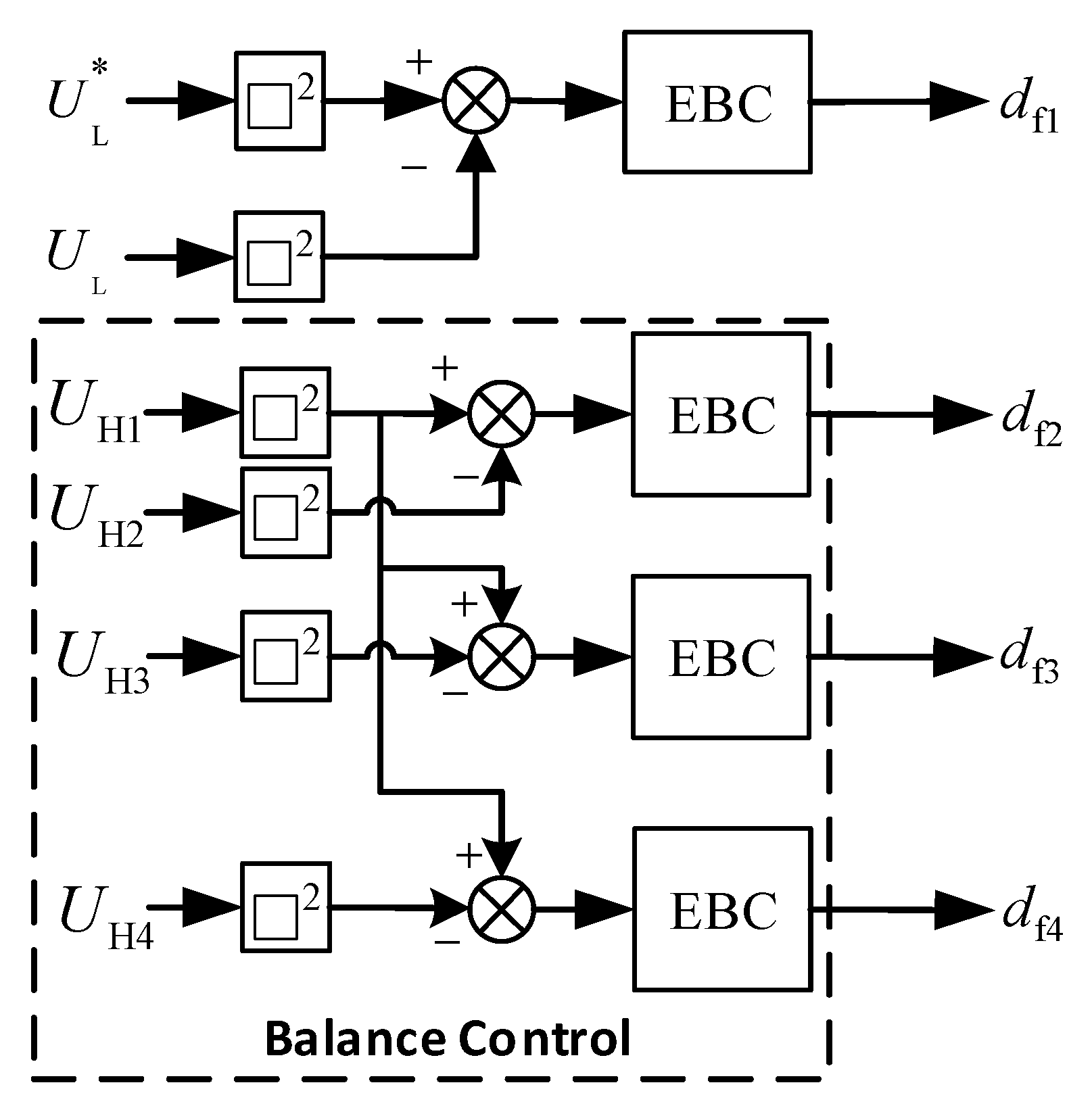
4. Energy Balance Control for CDB Voltage
4.1. Derivation of CDB Average Voltage Reference
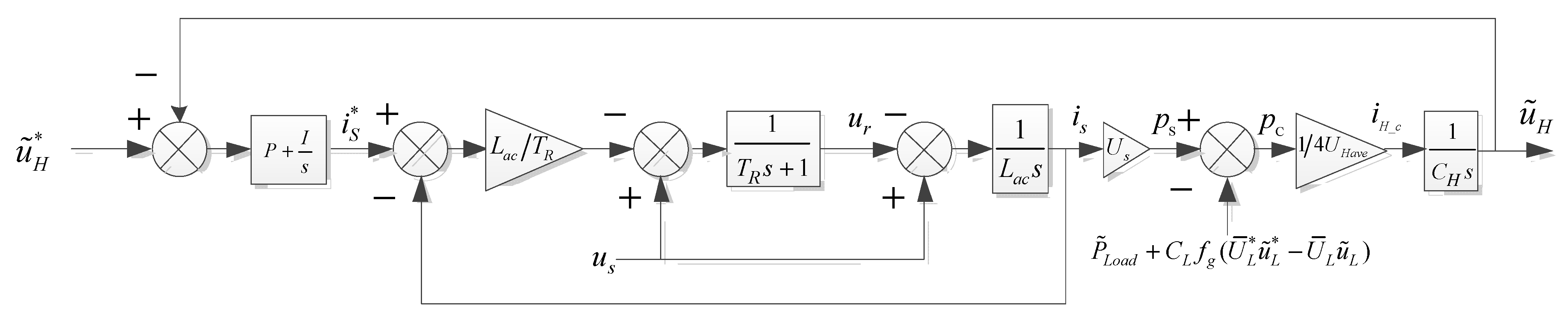
4.2. Energy Balance Control Scheme for Rectifier
4.3. Small-Signal Analysis
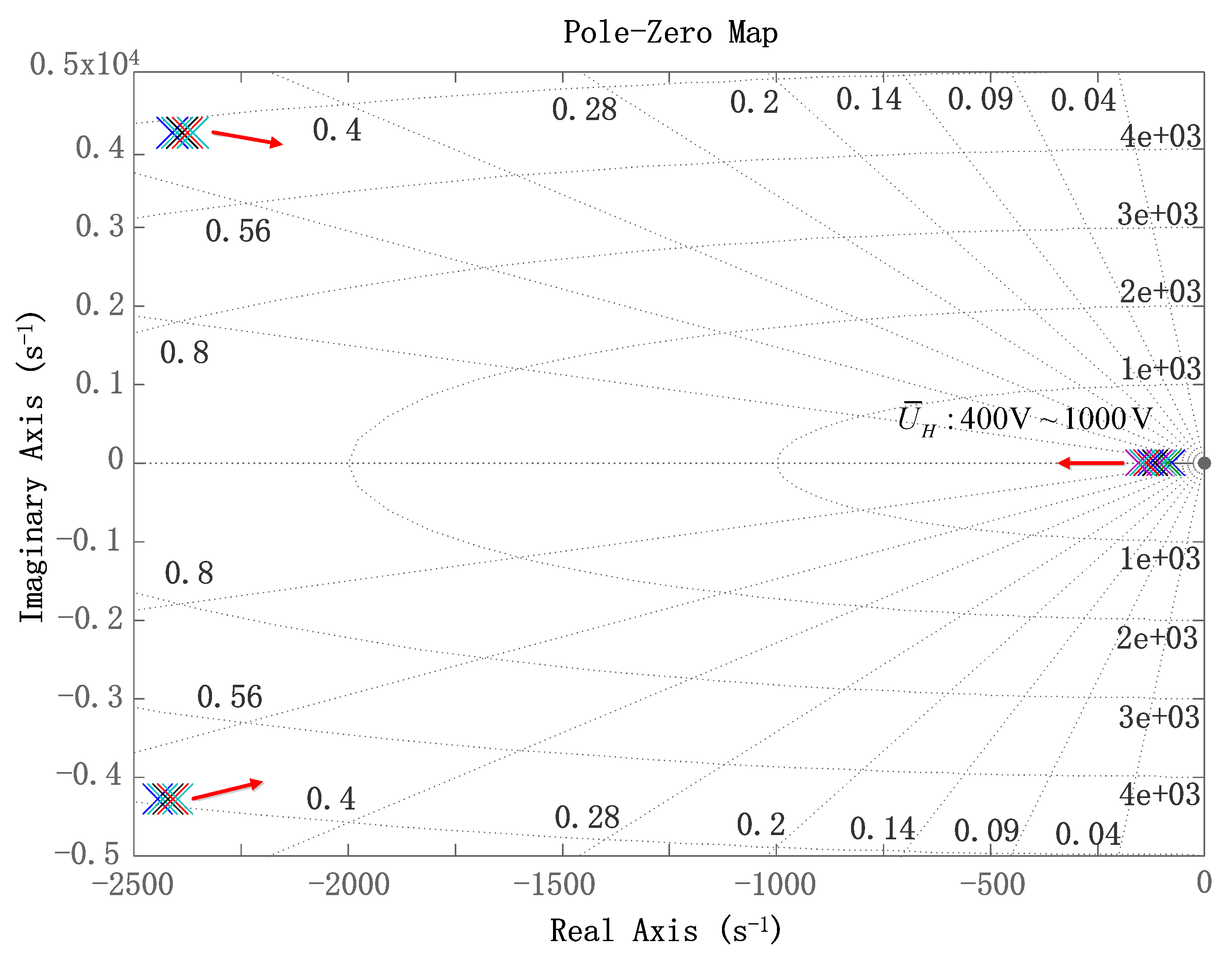
4.4. Stability Analysis
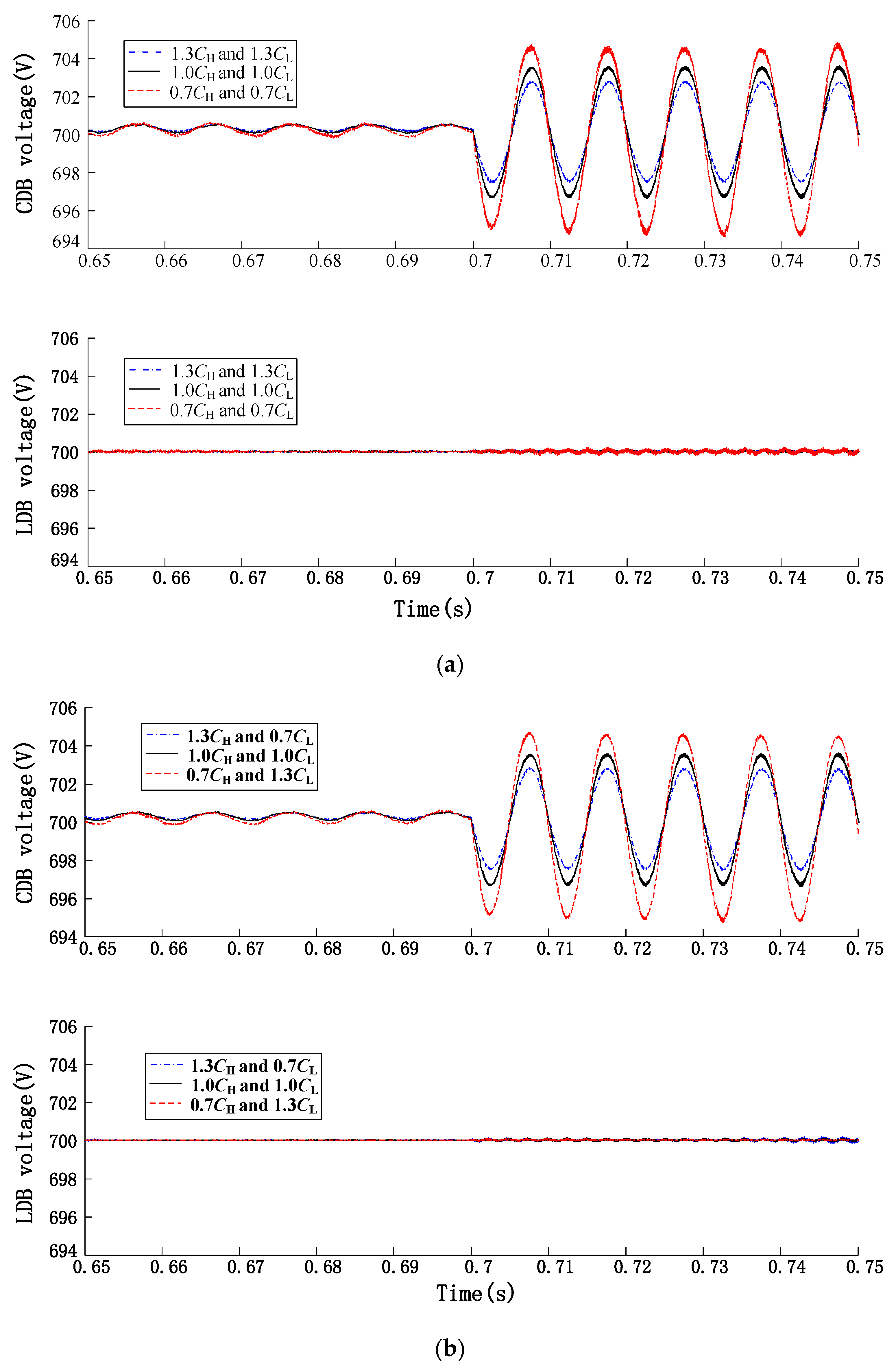
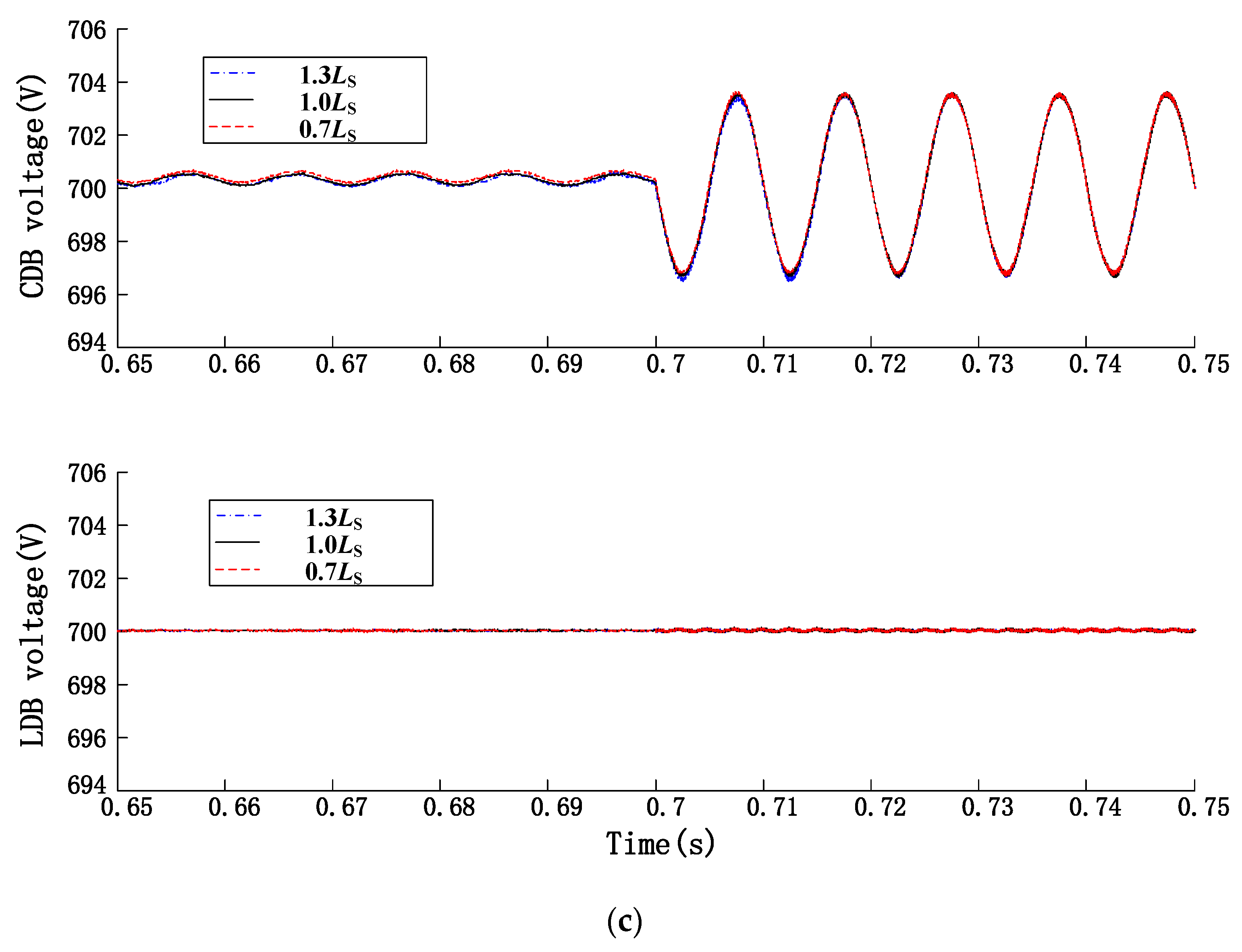
4.5. Adaptability Analysis of Model Parameter
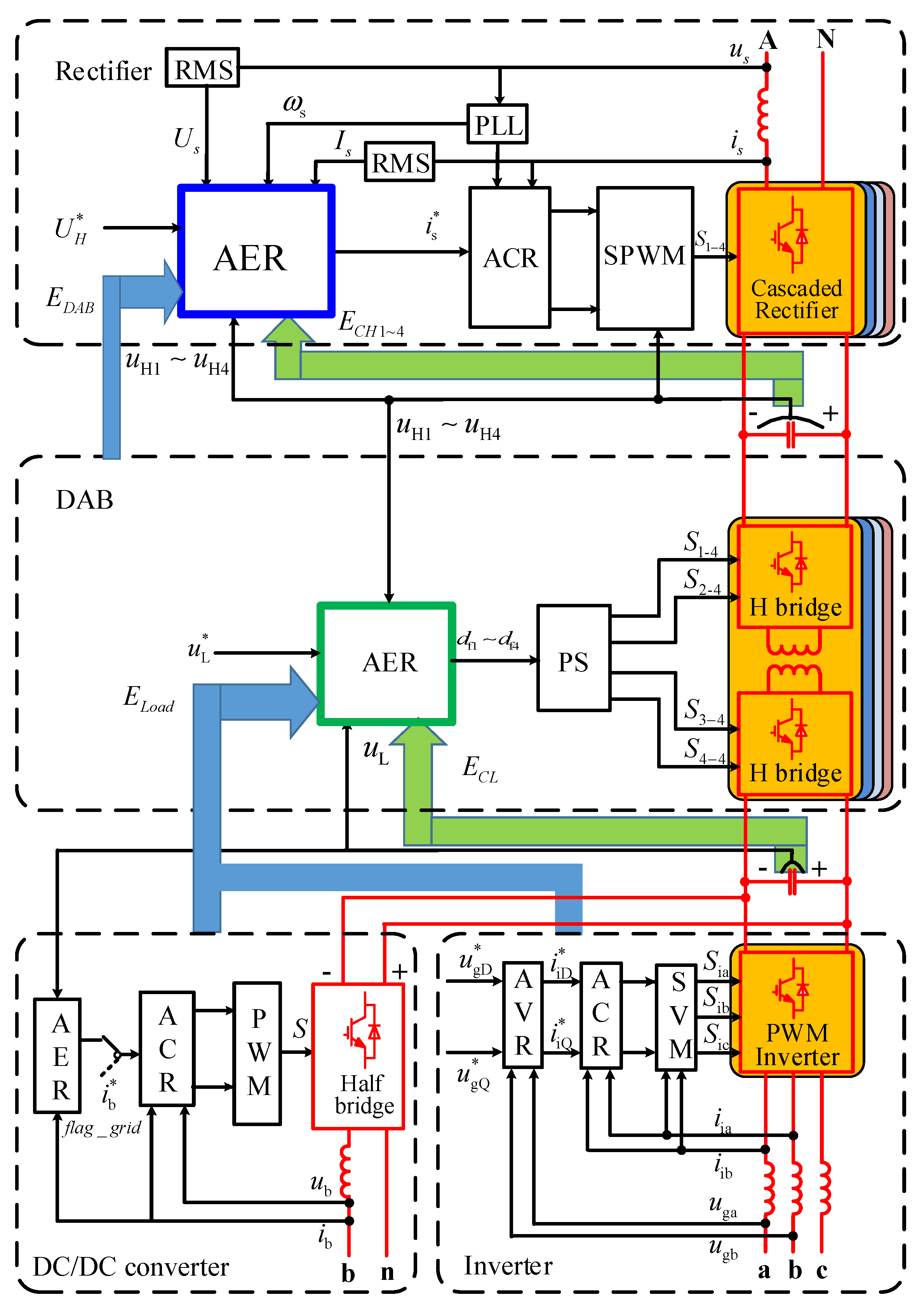
5. Overall Structure of Proposed Control Strategy
6. Simulation and Experimental Verification
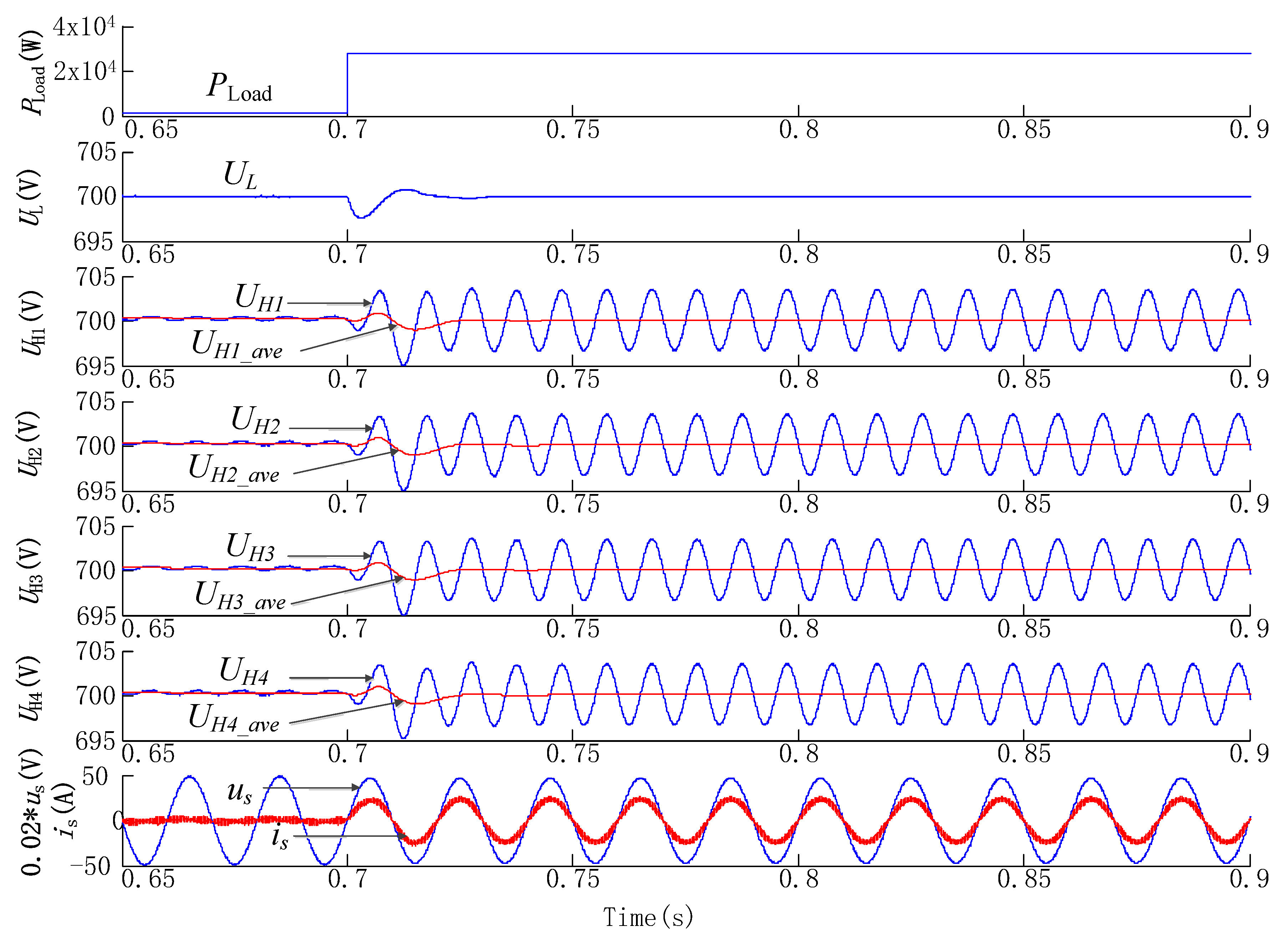
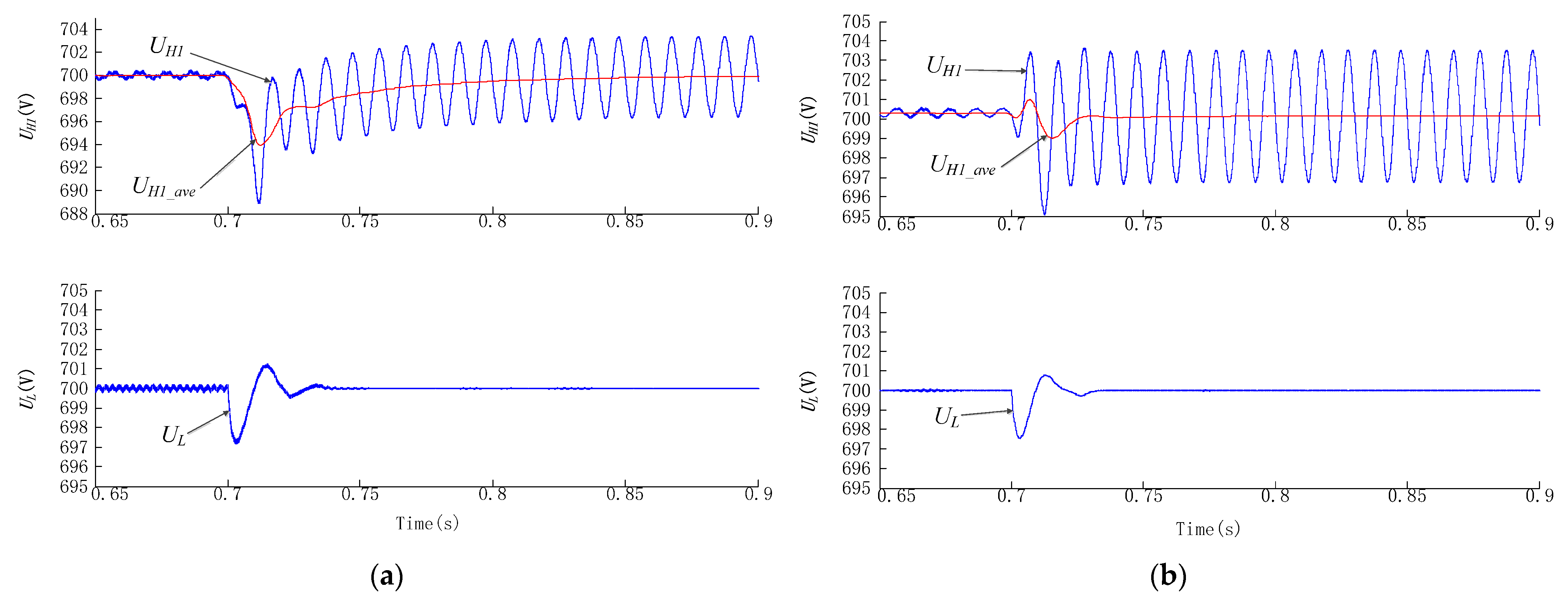
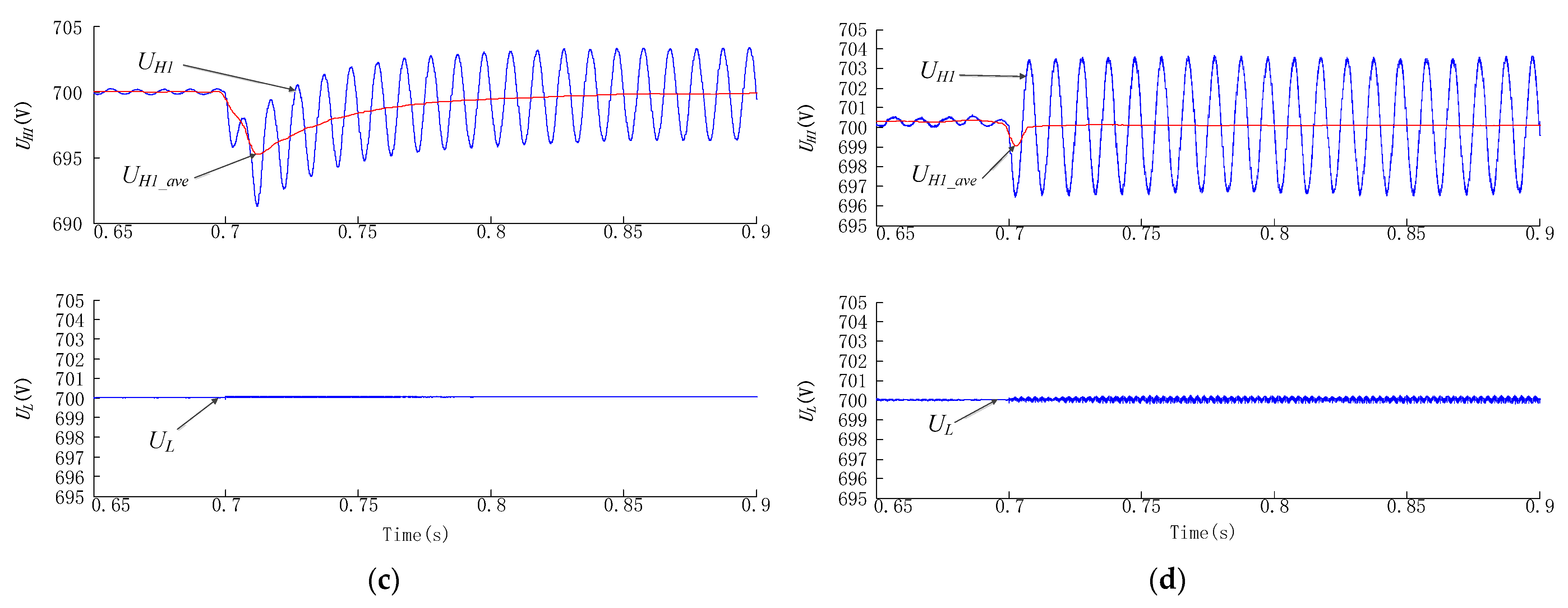
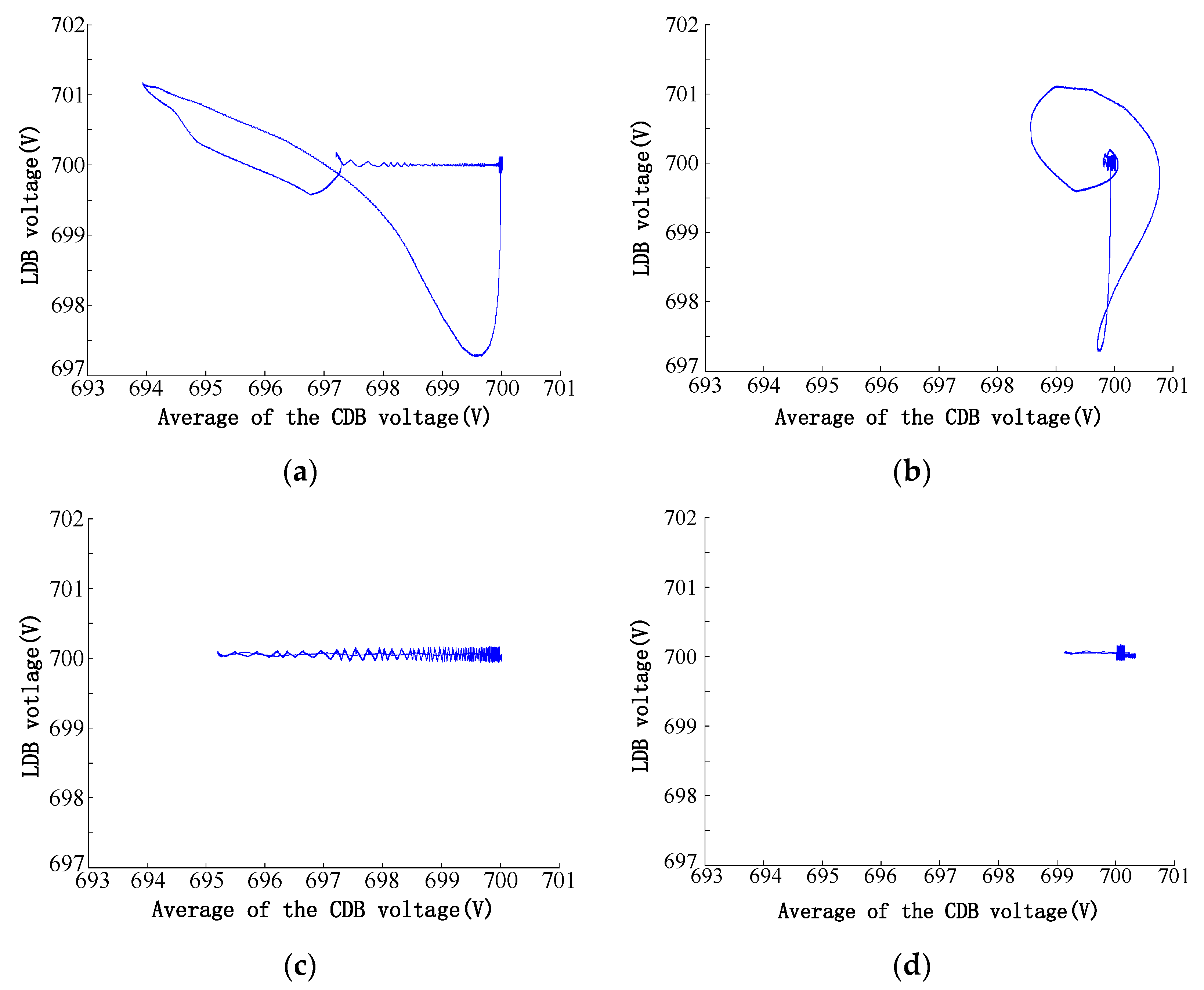
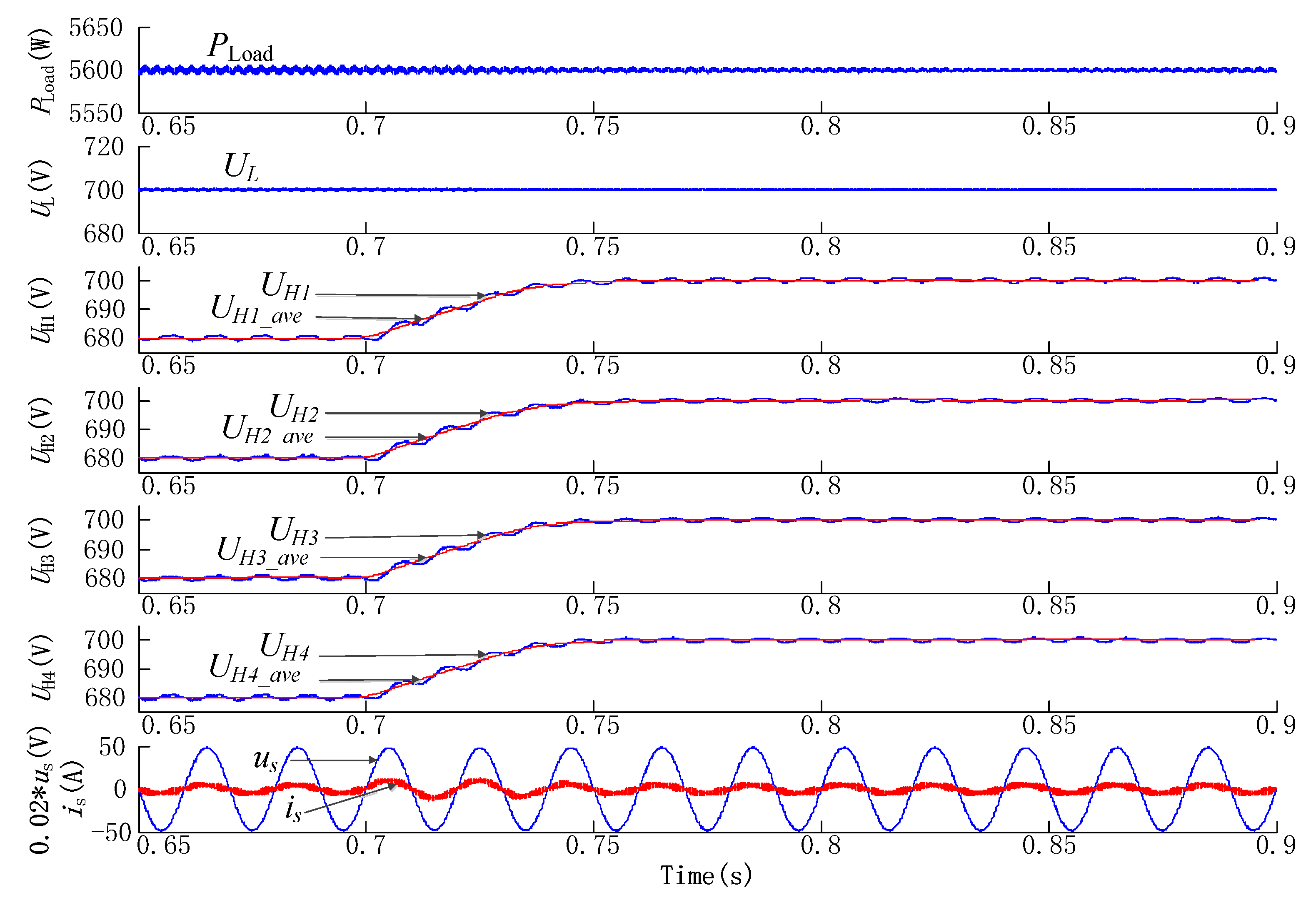
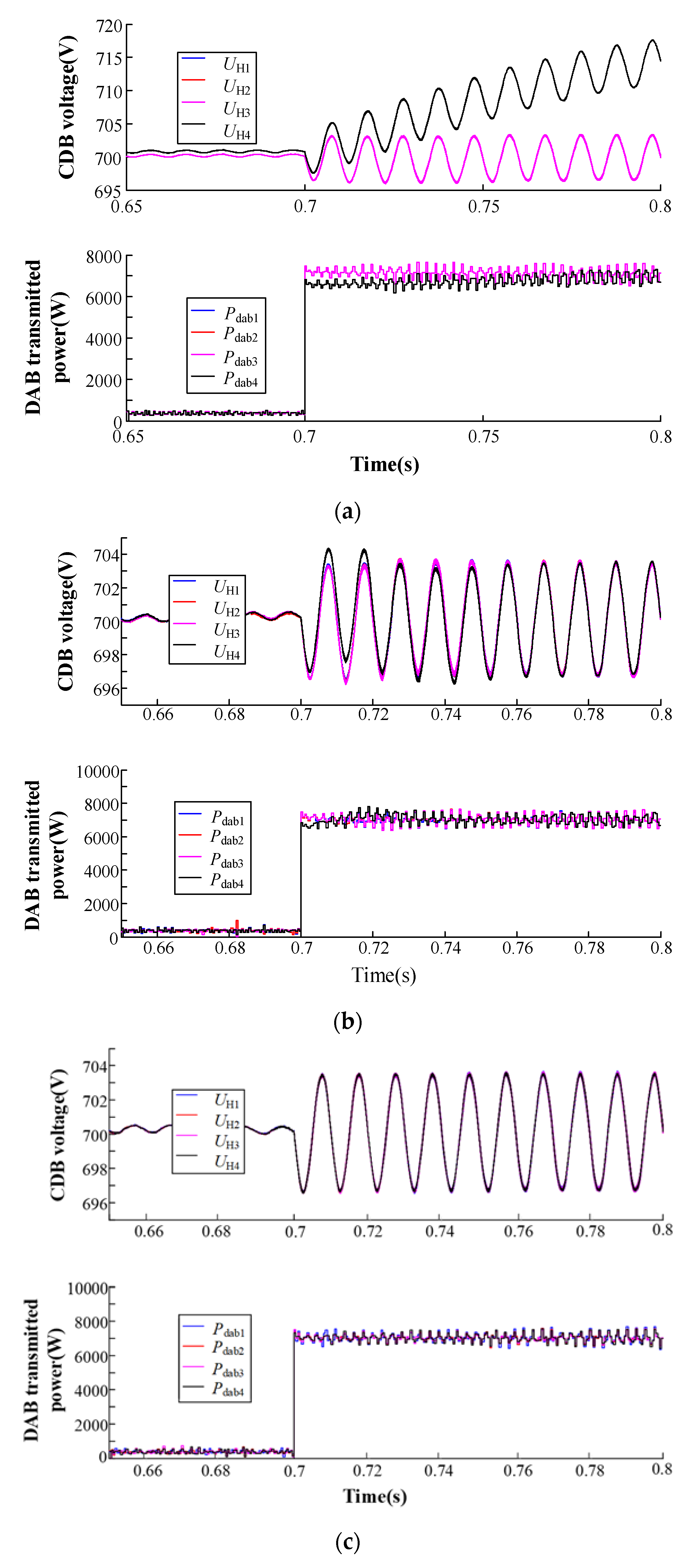
6.1. Simulation Results
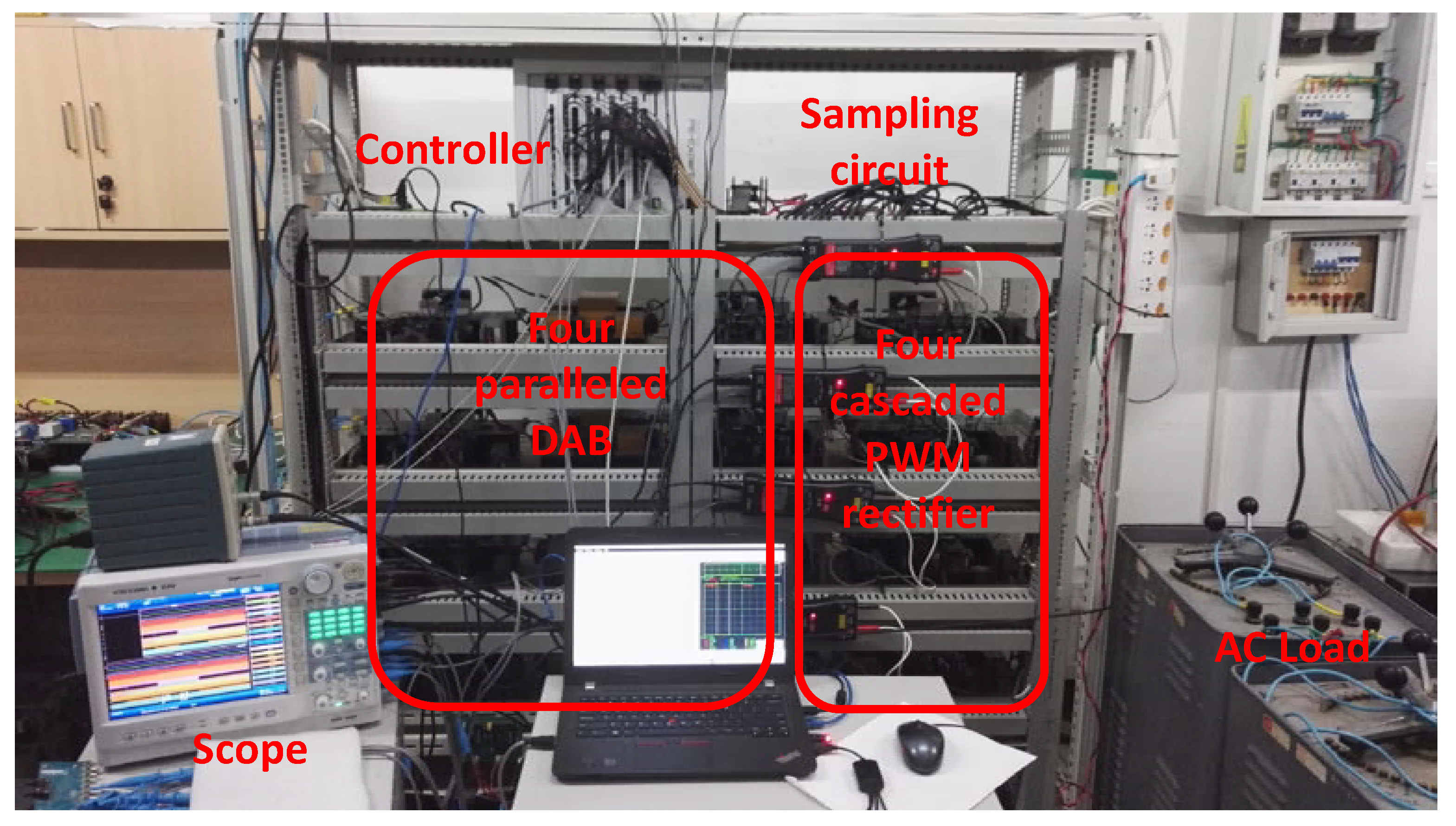
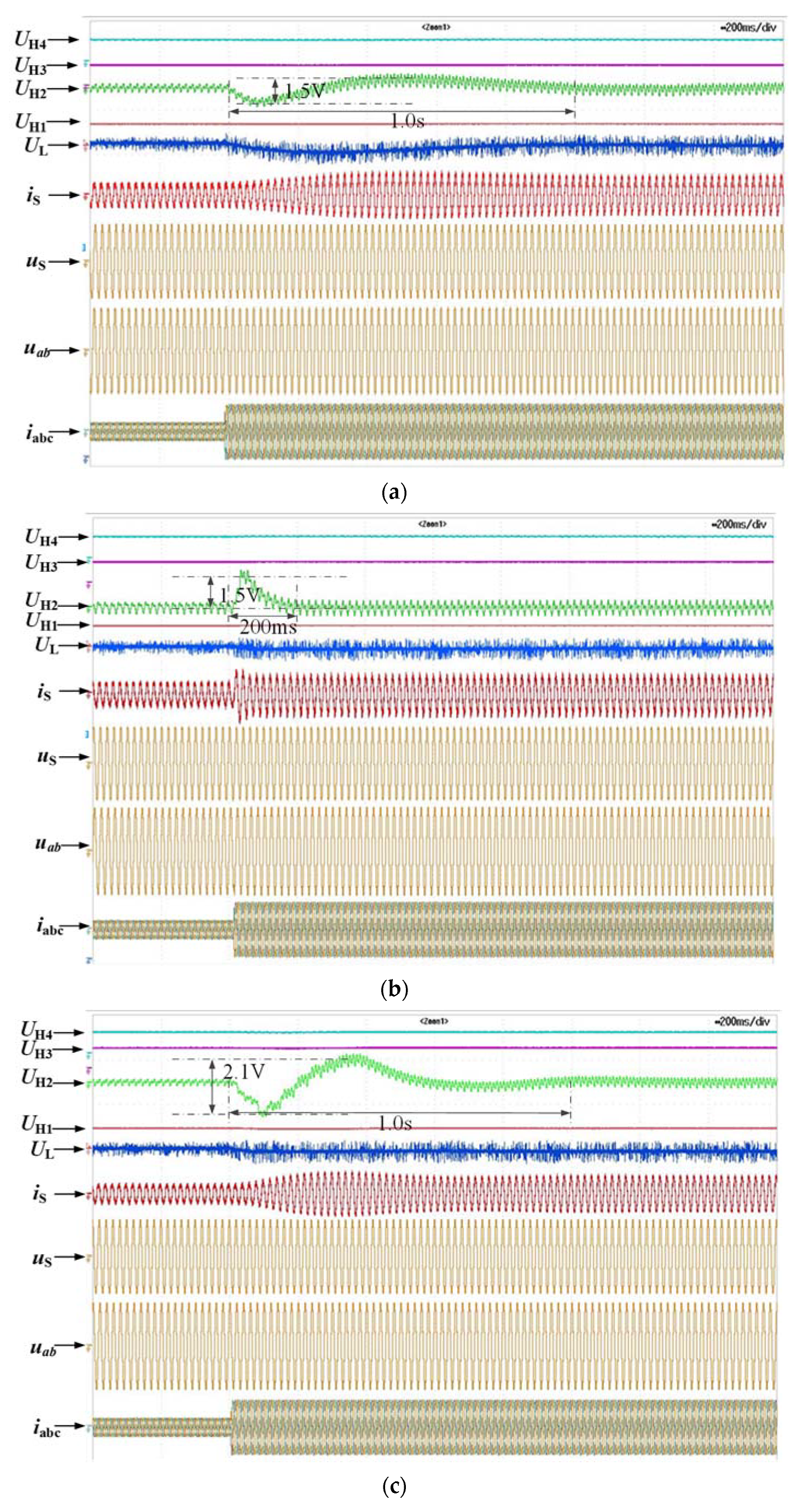
6.2. Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mishra, D.K.; Ghadi, M.J.; Li, L.; Hossain, M.J.; Zhang, J.; Ray, P.K.; Mohanty, A. A review on solid-state transformer: A breakthrough technology for future smart distribution grids. Int. J. Electr. Power Energy Syst. 2021, 133, 107255. [Google Scholar] [CrossRef]
- Chen, M.; Chou, S.-F.; Blaabjerg, F.; Davari, P. Overview of Power Electronic Converter Topologies Enabling Large-Scale Hydrogen Production via Water Electrolysis. Appl. Sci. 2022, 12, 1906. [Google Scholar] [CrossRef]
- Sha, G.L.; Duan, Q.; Sheng, W.X.; Pan, A.Q.; Zheng, Y. A Multiport Electric Energy Routing Scheme Applied to Battery Energy Storage System. J. Eng. 2021, 2021, 6637926. [Google Scholar] [CrossRef]
- Zheng, L.; Kandula, R.P.; Divan, D. Current-Source Solid-State DC Transformer Integrating LVDC Microgrid, Energy Storage, and Renewable Energy Into MVDC Grid. IEEE Trans. Power Electron. 2022, 37, 1044–1058. [Google Scholar] [CrossRef]
- Wang, D.; Guan, Z.; Tian, J.; Mao, C.X.; Yang, Y.; Wang, Z. A hybrid redundancy scheme for medium-voltage three-phase cascaded H-bridge electronic power transformer. IET Power Electron. 2022, 1–14. [Google Scholar] [CrossRef]
- Xu, X.; Huang, W.; Hu, Y.; Tai, N.; Ji, Y.; Xie, N. Power Management of AC/DC Hybrid Distribution Network With Multi-Port PET Considering Reliability of Power Supply System. Front. Energy Res. 2021, 9, 721385. [Google Scholar] [CrossRef]
- Li, K.; Wen, W.; Zhao, Z.; Yuan, L.; Cai, W.; Mo, X.; Gao, C. Design and Implementation of Four-Port Megawatt-Level High-Frequency-Bus Based Power Electronic Transformer. IEEE Trans. Power Electron. 2021, 36, 915–927. [Google Scholar] [CrossRef]
- Teng, J.; Sun, X.; Zhang, Y.; Fu, H.; Liu, X.; Zhao, W.; Li, X. Two Types of Common-Mode Voltage Suppression in Medium Voltage Motor Speed Regulation System Based on Solid State Transformer With Dual DC Bus. IEEE Trans. Power Electron. 2022, 37, 7082–7099. [Google Scholar] [CrossRef]
- Nair, A.C.; Fernandes, B.G. A Solid State Transformer based Fast Charging Station for Various Categories of Electric Vehicles with Batteries of Vastly Different Ratings. IEEE Trans. Ind. Electron. 2022, in press. [Google Scholar] [CrossRef]
- Perez, M.A.; Bernet, S.; Rodriguez, J.; Kouro, S.; Lizana, R. Circuit Topologies, Modeling, Control Schemes, and Applications of Modular Multilevel Converters. IEEE Trans. Power Electron. 2015, 30, 4–17. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, K.; Chen, X.; Xiong, J. Simplified model and submodule capacitor voltage balancing of single-phase AC/AC modular multilevel converter for railway traction purpose. IET Power Electron. 2016, 9, 951–959. [Google Scholar] [CrossRef] [Green Version]
- Ma, D.; Lin, S.; Cheng, Q.; Sun, Q. The DC Bus Voltage Control Based on Virtual Inertia for SST. In Proceedings of the 2018 IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), Enshi, China, 25–27 May 2018; pp. 575–580. [Google Scholar]
- Zhao, T.; She, X.; Bhattacharya, S.; Wang, G.; Wang, F.; Huang, A. Power synchronization control for capacitor minimization in Solid State Transformers (PET). In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 2812–2818. [Google Scholar]
- Wang, G.; She, X.; Wang, F.; Kadavelugu, A.; Zhao, T.; Huang, A.; Yao, W. Comparisons of different control strategies for 20 kVA solid state transformer. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 3173–3178. [Google Scholar]
- Zheng, L.; Kandula, R.P.; Kandula, R.P.; Divan, D. New Modulation and Impact of Transformer Leakage Inductance on Current-Source Solid-State Transformer. IEEE Trans. Power Electron. 2022, 37, 562–576. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, S.; Zhang, S.; Peng, F.Z. Comparison of Synchronous Condenser and STATCOM for Inertial Response Support. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 2684–2690. [Google Scholar]
- He, F.; Zhao, Z.; Yuan, L.; Lu, S. A DC-link voltage control scheme for single-phase grid-connected PV inverters. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 3941–3945. [Google Scholar]
- Ge, J.; Zhao, Z.; Yuan, L.; Lu, T. Energy Feed-Forward and Direct Feed-Forward Control for Solid-State Transformer. IEEE Trans. Power Electron. 2015, 30, 4042–4047. [Google Scholar] [CrossRef]
- Dash, S.K.; Ray, P.K. A New PV-Open-UPQC Configuration for Voltage Sensitive Loads utilizing novel Adaptive Controllers. IEEE Trans. Ind. Electron. 2022, in press. [Google Scholar] [CrossRef]
- Bahraini, F.; Abrishamifar, A.; Ayatollahi, A. Fast DC Bus Voltage Regulation for a Low Cost Single-Phase Grid-Connected PV Microinverter With a Small DC Bus Capacitor. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 4–6 February 2020. [Google Scholar]
- Alemi, P.; Bae, C.J.; Lee, D.C. Resonance Suppression Based on PR Control for Single-Phase Grid-Connected Inverters with LLCL Filters. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 459–467. [Google Scholar] [CrossRef]
- Gao, Y.G.; Jiang, F.Y.; Song, J.C.; Zheng, L.J.; Tian, F.Y.; Geng, P.L. A novel dual closed-loop control scheme based on repetitive control for grid-connected inverters with an LCL filter. ISA Trans. 2018, 74, 194–208. [Google Scholar] [CrossRef] [PubMed]
- Ouyang, H.; Zhang, K.; Zhang, P.; Kang, Y.; Xiong, J. Repetitive Compensation of Fluctuating DC Link Voltage for Railway Traction Drives. IEEE Trans. Power Electron. 2011, 26, 2160–2171. [Google Scholar] [CrossRef]
- Wang, R.; Wang, F.; Boroyevich, D.; Burgos, R.; Lai, R.; Ning, P.; Rajashekara, K. A High Power Density Single-Phase PWM Rectifier With Active Ripple Energy Storage. IEEE Trans. Power Electron. 2011, 26, 1430–1443. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Input ac voltage us | 1732 V | CDB capacitor CH | 4700 uF |
| CDB voltage UH | 700 V | LDB capacitor CL | 19,000 uF |
| LDB voltage UL | 700 V | Transformer turns ratio n | 1:1 |
| Input inductor Ls | 5 mH | HFT leakage inductor Ls | 328 uH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, G.; Bu, P.; Yuan, L. Energy Balance Control for Improving Transient Performance of DC Bus Voltage in Power Electronic Transformer for the Voltage-Sensitive Loads. Energies 2022, 15, 3129. https://doi.org/10.3390/en15093129
Feng G, Bu P, Yuan L. Energy Balance Control for Improving Transient Performance of DC Bus Voltage in Power Electronic Transformer for the Voltage-Sensitive Loads. Energies. 2022; 15(9):3129. https://doi.org/10.3390/en15093129
Chicago/Turabian StyleFeng, Gaohui, Pengsheng Bu, and Liqiang Yuan. 2022. "Energy Balance Control for Improving Transient Performance of DC Bus Voltage in Power Electronic Transformer for the Voltage-Sensitive Loads" Energies 15, no. 9: 3129. https://doi.org/10.3390/en15093129