
Design of Stator Winding Turn Number of Tap-Change PMSM for EVs According to Driving Cycles



Abstract
:1. Introduction
2. Loss Reduction at Significant Operating Points of the Driving Cycle
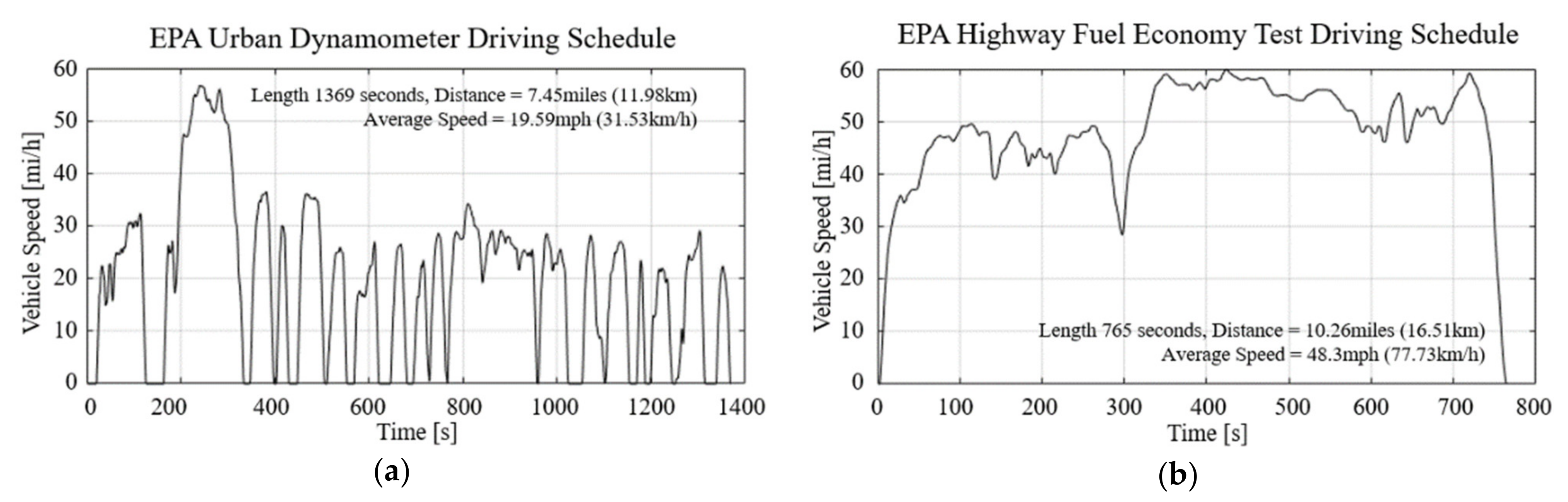
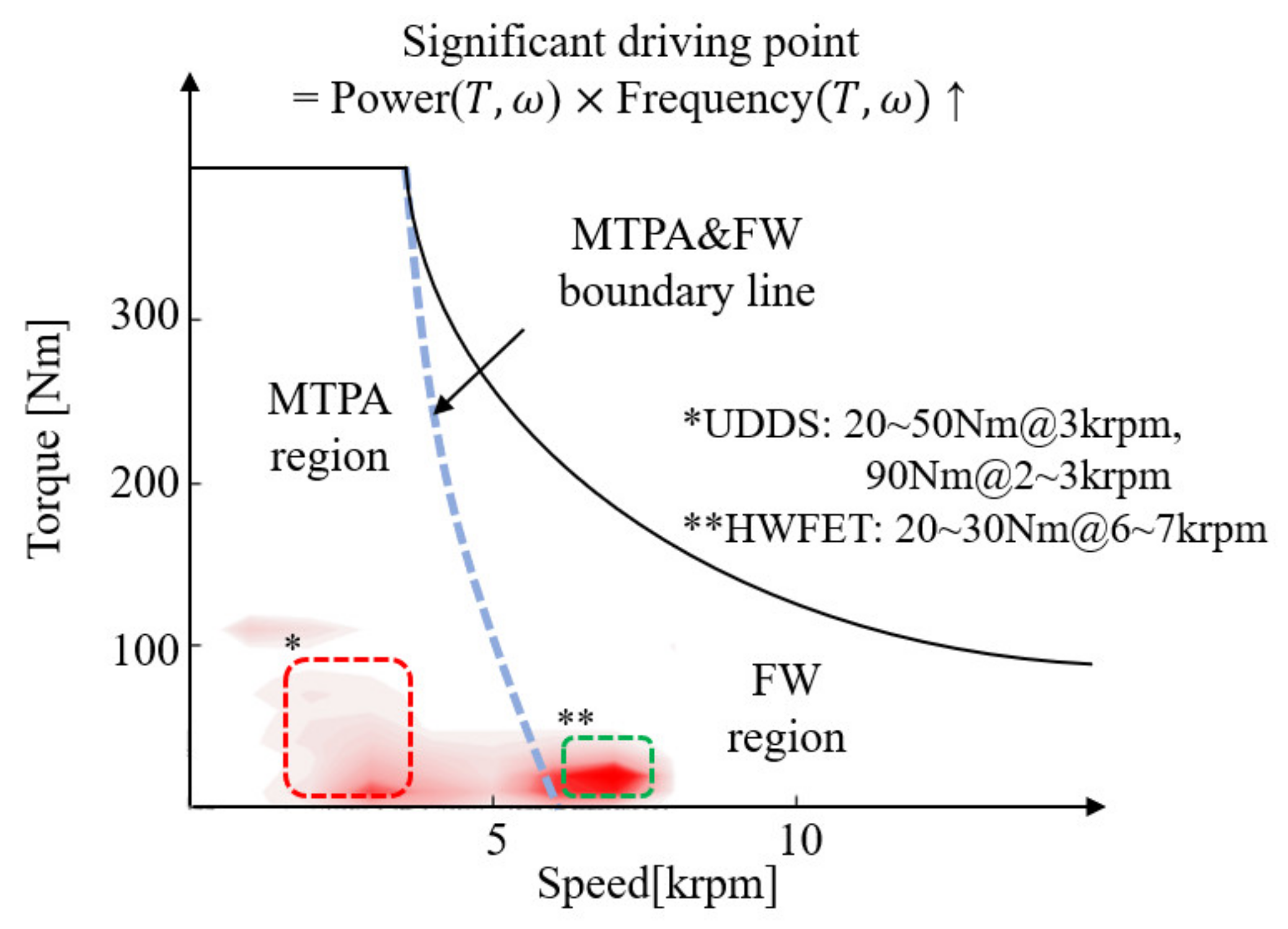
2.1. Driving Cycles in Motor Torque Speed Plane
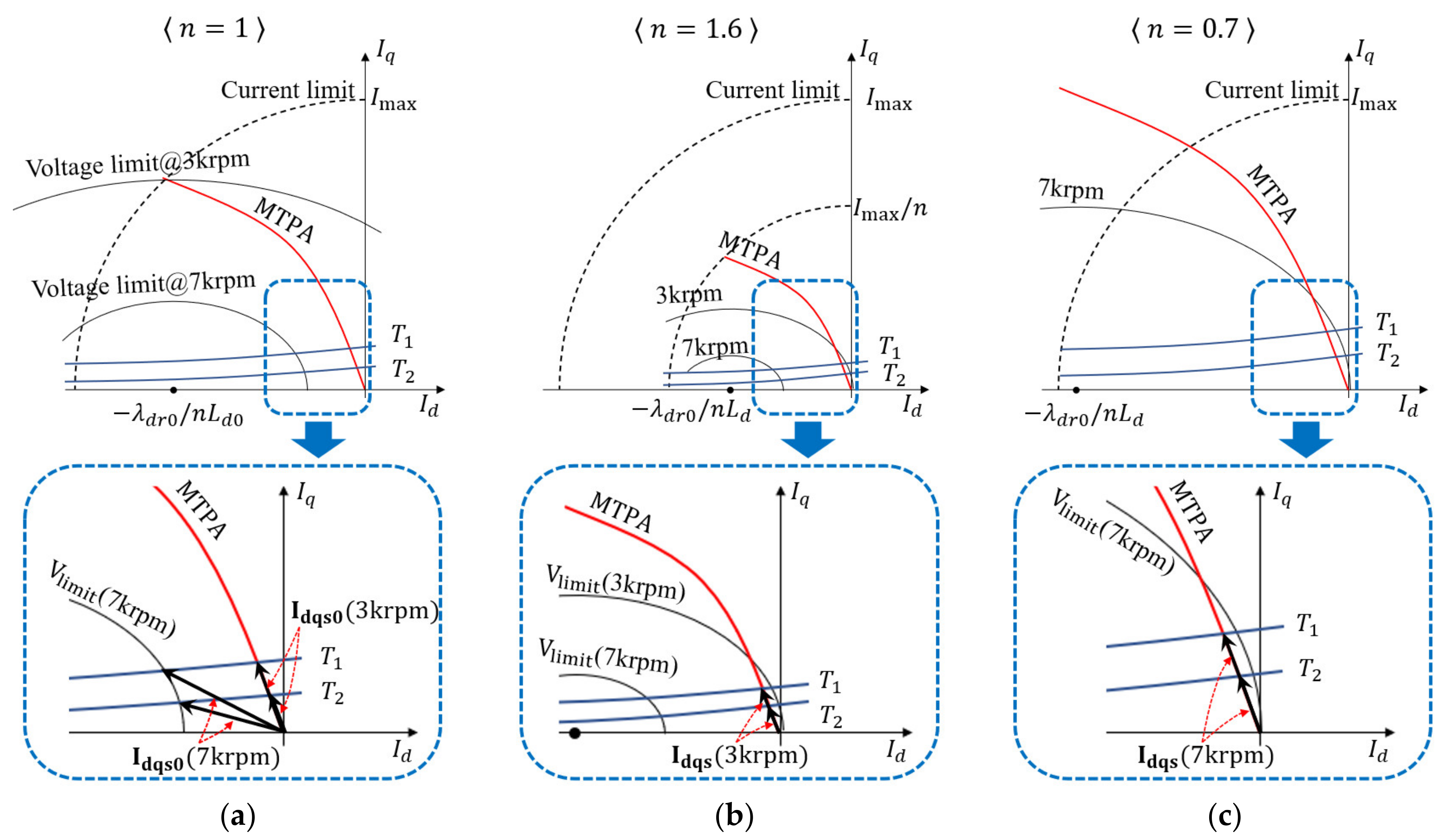
2.2. Variation of Motor Current, Voltage, and Motor Parameters According to the Stator Winding Turn Ratio
3. Motor and Inverter Losses Model for Tap-Change Motor
3.1. Motor Losses
3.2. Three-Phase Inverter and Tap-Change Circuit Losses
4. Design of Tap-Change Motor Stator Winding Turn Number
4.1. Calculation Process of the Energy Consumption Reduction Rate
- Step 1: Using various turn number combinations {(low-speed mode), (high-speed mode)}, the minimum d- and q-axis current command values at each operating speed-torque point of the driving cycles is derived based on the flux linkage and torque data from the FEA of the reference motor.
- Step 2: The total losses are calculated at each operating speed-torque point using the proposed motor and inverter loss model involving the derived current command value from Step 1.
- Step 3: At each speed-torque point, one drive mode between (low-speed mode) and (high-speed mode) is selected to have a lower loss.
- Step 4: With the chosen loss data of the drive mode, the accumulated energy consumption is calculated using the speed-torque frequency of the driving cycles and compared to that of the reference motor.
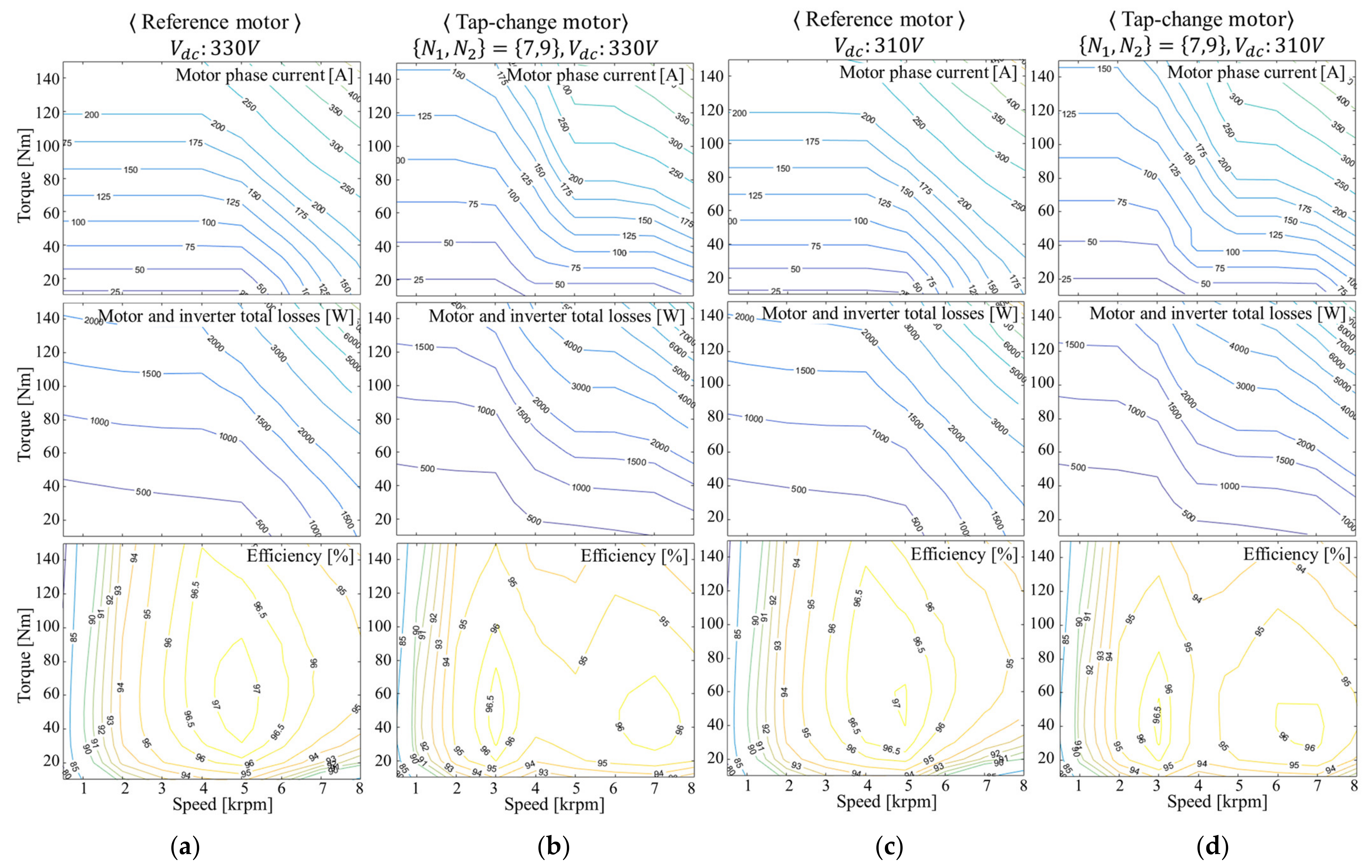
4.2. Analysis of the Calculated Energy Consumption Reduction Rate
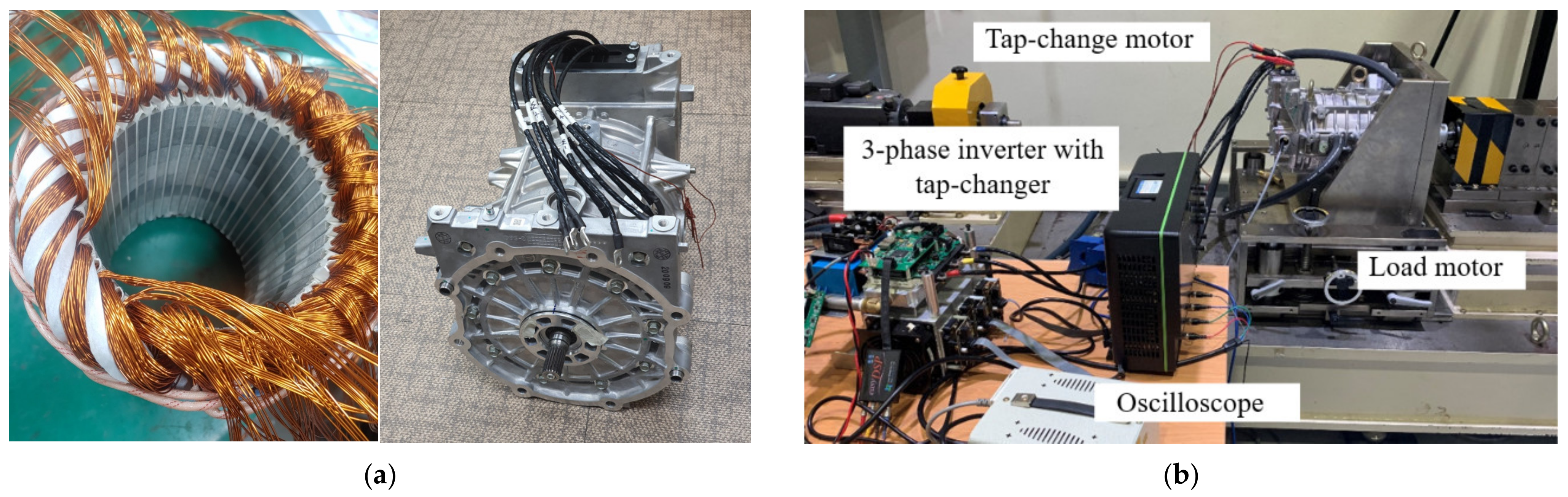
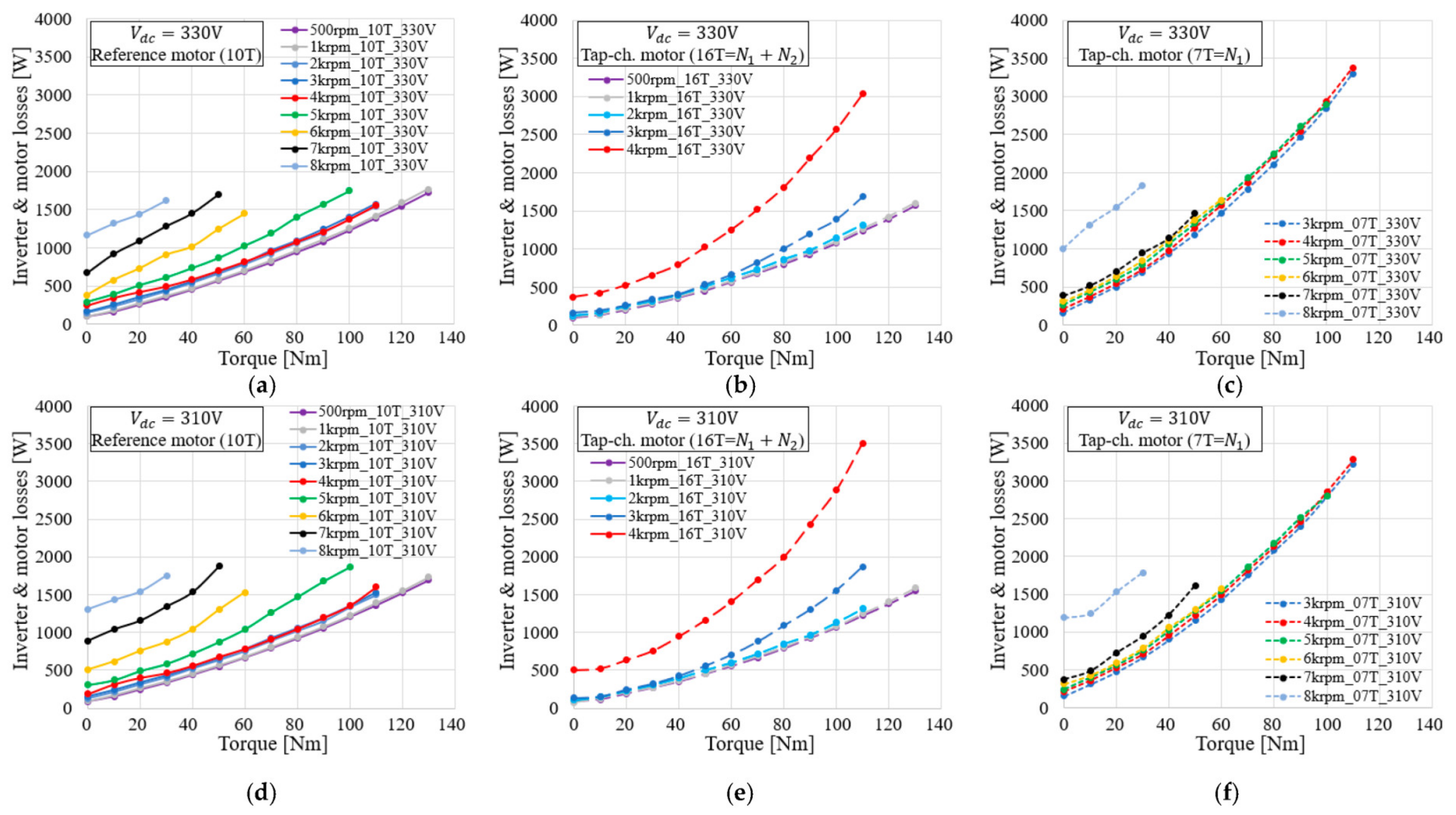
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, H.; Chen, H.; Zhu, J.; Maksimovic, D.; Erickson, R. Impact of 1.2 kV SiC-MOSFET EV traction inverter on urban driving. In Proceedings of the IEEE 4th Workshop Wide Bandgap Power Devices and Applications, Fayetteville, NC, USA, 7–9 November 2016; pp. 78–83. [Google Scholar]
- Kim, H.; Chen, H.; Maksimovi, D.; Erickson, R. Boost composite converter design based on drive cycle weighted losses in electric vehicle powertrain applications. In Proceedings of the IEEE Energy Conversion Congress & Expo, Milwaukee, WI, USA, 18–22 November 2016; pp. 1–7. [Google Scholar]
- Zhang, J.; Xu, L.; Hu, Z.; Liang, C.; Li, J.; Ouyang, M. Optimal sizing of fuel cell electric vehicle powertrain considering multiple objectives. In Proceedings of the IECON 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, Singapore, 18–21 October 2020; pp. 317–322. [Google Scholar]
- United States Environmental Protection Agency. Vehicle and Fuel Emission Testing—Dynamometer Drive Schedule. Available online: www.epa.gov (accessed on 25 December 2022).
- Carraro, E.; Morandin, M.; Bianchi, N. Traction PMASR motor optimization according to a given driving cycle. IEEE Trans. Ind. Appl. 2016, 52, 209–216. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Lei, G.; Bramerdorfer, G.; Guo, Y.; Zhu, J. System-level robust design optimization of a switched reluctance motor drive system considering multiple driving cycles. IEEE Trans. Energy Convers. 2021, 36, 348–357. [Google Scholar] [CrossRef]
- Zhou, X.; Zhu, X.; Wu, W.; Xiang, Z.; Liu, Y.; Quan, L. Multi-objective optimization design of variable-saliency-ratio PM motor considering driving cycles. IEEE Trans. Ind. Electron. 2021, 68, 6516–6526. [Google Scholar] [CrossRef]
- Pastellides, S.; Gerber, S.; Wang, R.J.; Kamper, M. Evaluation of drive cycle-based traction motor design strategies using gradient optimization. Energies 2022, 15, 1095. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Cai, Y.; Lei, G.; Guo, Y.; Zhu, J. Driving-cycle-oriented design optimization of a permanent magnet hub motor drive system for a four-wheel-drive electric vehicle. IEEE Trans. Transp. Electrific. 2020, 6, 1115–1125. [Google Scholar] [CrossRef]
- Miller, J.M. Propulsion Systems for Hybrid Vehicles; IET: London, UK, 2010; pp. 293–294. [Google Scholar]
- Kume, T.; Sawa, T.; Sawamura, M.; Zenke, M. Inverter driving method for induction motors. U.S. Patent 4,916,376, 10 April 1990. [Google Scholar]
- Chen, C.H.; Cheng, M.Y.; Tsai, M.S. Study on a wide speed range integrated electrical transmission system. In Proceedings of the International Conference on Power Electronics and Drives Systems, Kuala Lumpur, Malaysia, 28 November–1 December 2005; pp. 781–786. [Google Scholar]
- Hsieh, M.F.; Hsu, F.S.; Dorrell, D.G. Winding changeover permanentmagnet generators for renewable energy applications. IEEE Trans. Magn. 2012, 48, 4168–4171. [Google Scholar] [CrossRef]
- Shi, P.; Cui, X.; Zhu, L. A SCR-based switch-control strategy of delta/wye switchover for delta connected induction motors. In Proceedings of the 7th International Conference on Power Electronics and Motion Control, Harbin, China, 2–5 June 2012; pp. 2607–2611. [Google Scholar]
- Shin, Y.; Cho, S.; Jung, H.; Park, J.; Shin, W.; Kim, D.; Park, S.; Choi, S. A thyristor-based seamless winding changeover circuit for high efficiency of electric vehicle drive system. In Proceedings of the 10th International Conference on Power Electronics and ECCE Asia, Busan, Korea, 27–30 May 2019; pp. 1274–1279. [Google Scholar]
- Kume, T.; Iwakane, T.; Sawa, T.; Yoshida, T.; Nagai, I. A wide constant power range vector-controlled AC motor drive using winding changeover technique. IEEE Trans. Ind. Appl. 1991, 27, 934–939. [Google Scholar] [CrossRef]
- Swamy, M.M.; Kume, T.; Maemura, A.; Morimoto, S. Extended high speed operation via electronic winding-change method for AC motors. IEEE Trans. Ind. Appl. 2006, 42, 742–753. [Google Scholar] [CrossRef]
- Takatsuka, Y.; Hara, H.; Yamada, K.; Maemura, A.; Kume, T. A wide speed range high efficiency EV drive system using winding changeover technique and SiC devices. In Proceedings of the IPEC-Hiroshima 2014—ECCE Asia, Hiroshima, Japan, 18–21 May 2014; pp. 1898–1903. [Google Scholar]
- Im, S.H.; Gu, B.G. A snubberless solid-state tap changer for permanent magnet synchronous motors. IEEE Trans. Power Electron. 2020, 35, 12143–12152. [Google Scholar] [CrossRef]
- Li, A.; Jiang, D.; Sun, X.; Liu, Z. Online drive topology conversion technology for PMSM speed range extension. IEEE Trans. Power Electron. 2022, 37, 7113–7121. [Google Scholar] [CrossRef]
- Cheng, L.J.; Tsai, M.C. Robust scalar control of synchronous reluctance motor with optimal efficiency by MTPA control. IEEE Access 2021, 9, 32599–32612. [Google Scholar] [CrossRef]
- Sepulchre, L.; Fadel, M.; Pietrzak-David, M.; Porte, G. MTPV Flux-Weakening Strategy for PMSM High Speed Drive. IEEE Trans. Ind. Appl. 2018, 54, 6081–6089. [Google Scholar] [CrossRef]
- Xu, Y.; Morito, C.; Lorenz, R.D. Extending high-speed operating range of induction machine drives using deadbeat-direct torque and flux control with precise flux weakening. IEEE Trans. Ind. Appl. 2019, 55, 3770–3780. [Google Scholar] [CrossRef]
- Yamazaki, K.; Seto, Y. Iron loss analysis of interior permanent-magnet synchronous motors-variation of main loss factors due to driving condition. IEEE Trans. Ind. Appl. 2006, 42, 1045–1052. [Google Scholar] [CrossRef]
- Yamazaki, K.; Abe, A. Loss investigation of interior permanent-magnet motors considering carrier harmonics and magnet eddy currents. IEEE Trans. Ind. Appl. 2009, 45, 659–665. [Google Scholar] [CrossRef]
- Yamazaki, K.; Takaki, Y. Iron loss analysis of permanent magnet motors by considering minor hysteresis loops caused by inverters. IEEE Trans. Magn. 2019, 55, 1300304. [Google Scholar] [CrossRef]
- Graovac, D.; Purschel, M. IGBT Power Losses Calculation Using the Data-Sheet Parameters. Infineon Application Note. 2009. Available online: https://community.element14.com/products/manufacturers/infineon/w/documents/6572/igbt-power-losses-calculation-using-the-data-sheet-parameters (accessed on 25 December 2022).
- Infineon Application Note, Calculation of Major IGBT Operating Parameters. ANIP9931E. 1999. Available online: https://pdf4pro.com/cdn/calculation-of-major-igbt-operating-21a8fc.pdf (accessed on 25 December 2022).
- Yamazaki, K.; Takeuchi, H. Impact of mechanical stress on characteristics of interior permanent magnet synchronous motors. IEEE Trans. Ind. Appl. 2017, 53, 963–970. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Pole number | 8 | |
| Maximum output power | 150 | kW |
| Stator out diameter | 200 | mm |
| Rotor diameter | 132 | mm |
| Height | 175 | mm |
| Number of slots | 48 | |
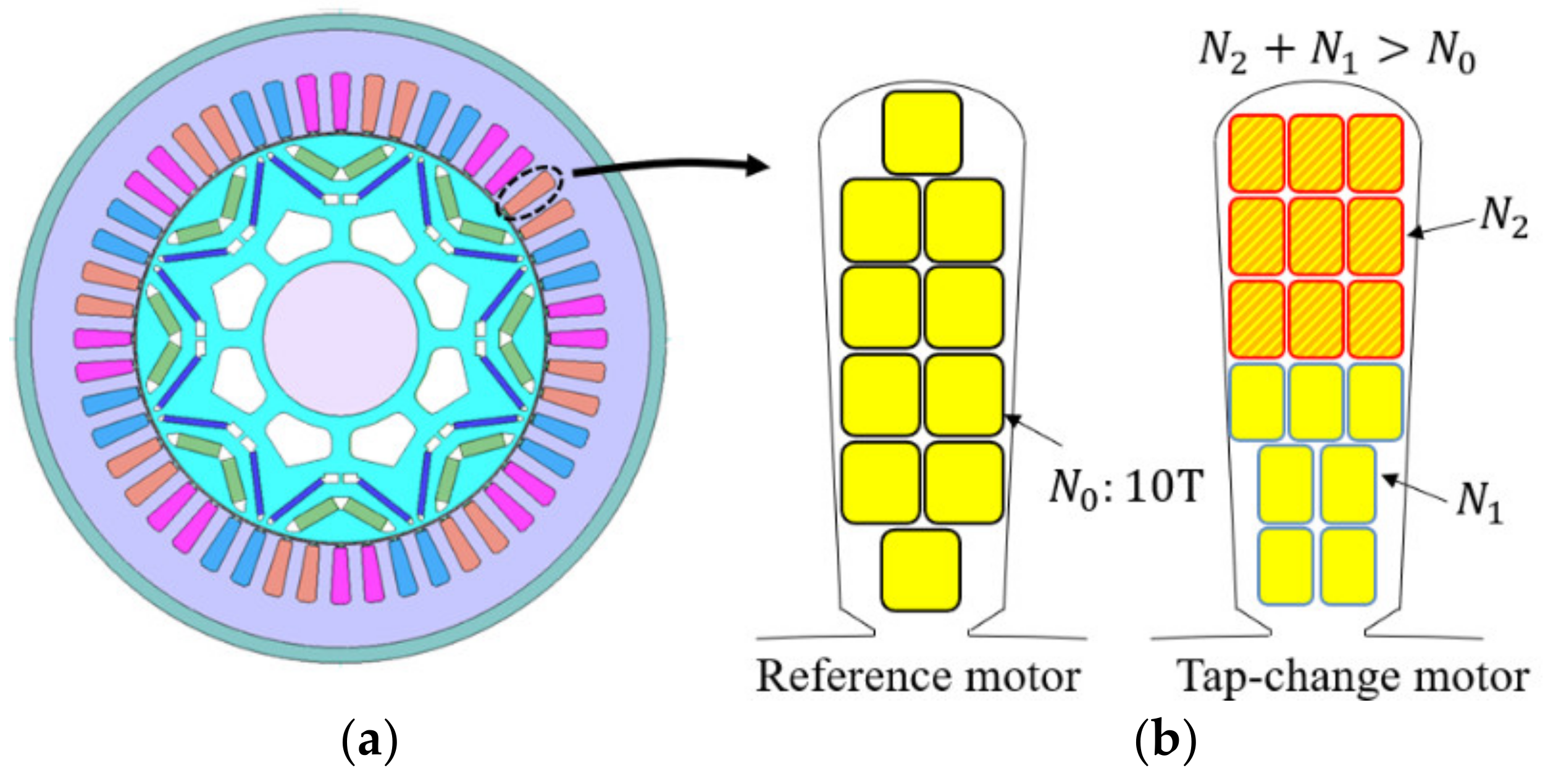
| Winding turn number per slot | 10 | |
| Number of windings per phase | 8 | |
| Stator phase resistance Rs | 10.8 | m |
| Improvement Rate [%] Battery Voltage: 330 V | Improvement Rate [%] Battery Voltage: 310 V | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| UDDS | N1 | UDDS | N1 | ||||||||||
| 5 | 6 | 7 | 8 | 9 | 5 | 6 | 7 | 8 | 9 | ||||
| N1 + N2 | 11 | −0.96 | −0.69 | −0.48 | −0.53 | −0.96 | N1 + N2 | 11 | −0.58 | −0.28 | −0.10 | −0.39 | −0.99 |
| 12 | −0.18 | 0.13 | 0.35 | 0.33 | −0.09 | 12 | 0.19 | 0.51 | 0.73 | 0.45 | −0.17 | ||
| 13 | 0.43 | 0.76 | 1.00 | 1.01 | 0.57 | 13 | 0.58 | 0.92 | 1.18 | 0.89 | 0.26 | ||
| 14 | 0.67 | 1.02 | 1.30 | 1.31 | 0.87 | 14 | 0.67 | 1.08 | 1.41 | 1.18 | 0.62 | ||
| 15 | 0.69 | 1.10 | 1.45 | 1.51 | 1.14 | 15 | 0.74 | 1.23 | 1.62 | 1.46 | 0.96 | ||
| 16 | 0.71 | 1.19 | 1.61 | 1.73 | 1.40 | 16 | 0.73 | 1.32 | 1.76 | 1.64 | 1.15 | ||
| 17 | 0.65 | 1.24 | 1.70 | 1.86 | 1.56 | 17 | 0.53 | 1.17 | 1.66 | 1.56 | 1.06 | ||
| 18 | 0.46 | 1.09 | 1.59 | 1.78 | 1.50 | 18 | 0.05 | 0.75 | 1.28 | 1.21 | 0.70 | ||
| 19 | 0.01 | 0.70 | 1.25 | 1.47 | 1.19 | 19 | −0.47 | 0.28 | 0.91 | 0.90 | 0.42 | ||
| 20 | −0.50 | 0.25 | 0.82 | 1.13 | 0.89 | 20 | −0.96 | −0.08 | 0.57 | 0.62 | 0.19 | ||
| HWFET | N1 | HWFET | N1 | ||||||||||
| 5 | 6 | 7 | 8 | 9 | 5 | 6 | 7 | 8 | 9 | ||||
| N1 + N2 | 6 | 0.83 | - | - | - | - | N1 + N2 | 6 | 2.29 | - | - | - | - |
| 7 | 1.63 | 1.64 | - | - | - | 7 | 3.02 | 3.04 | - | - | - | ||
| 8 | 1.75 | 1.80 | 2.03 | - | - | 8 | 2.76 | 3.16 | 3.38 | - | - | ||
| 9 | 1.40 | 1.85 | 2.15 | 1.90 | - | 9 | 2.43 | 2.93 | 3.35 | 2.58 | - | ||
| 10 | 0.94 | 1.54 | 2.06 | 1.96 | 0.82 | 10 | 2.15 | 2.92 | 3.37 | 2.58 | 0.80 | ||
| 11 | 0.67 | 1.48 | 2.03 | 1.93 | 0.77 | 11 | 2.00 | 2.81 | 3.29 | 2.52 | 0.72 | ||
| 12 | 0.50 | 1.37 | 1.94 | 1.87 | 0.72 | 12 | 1.87 | 2.72 | 3.26 | 2.48 | 0.63 | ||
| 13 | 0.37 | 1.27 | 1.90 | 1.85 | 0.66 | 13 | 1.76 | 2.65 | 3.22 | 2.42 | 0.51 | ||
| 14 | 0.25 | 1.19 | 1.85 | 1.80 | 0.57 | 14 | 1.65 | 2.58 | 3.16 | 2.34 | 0.39 | ||
| 15 | 0.14 | 1.12 | 1.79 | 1.74 | 0.48 | 15 | 1.55 | 2.52 | 3.11 | 2.28 | 0.28 | ||
| Combined | N1 | Combined | N1 | ||||||||||
| 5 | 6 | 7 | 8 | 9 | 5 | 6 | 7 | 8 | 9 | ||||
| N1 + N2 | 11 | −0.23 | 0.29 | 0.65 | 0.58 | −0.18 | N1 + N2 | 11 | 0.58 | 1.11 | 1.43 | 0.92 | −0.22 |
| 12 | 0.12 | 0.69 | 1.07 | 1.03 | 0.28 | 12 | 0.95 | 1.51 | 1.87 | 1.37 | 0.19 | ||
| 13 | 0.40 | 0.99 | 1.40 | 1.39 | 0.61 | 13 | 1.11 | 1.70 | 2.10 | 1.58 | 0.37 | ||
| 14 | 0.48 | 1.10 | 1.54 | 1.53 | 0.74 | 14 | 1.11 | 1.76 | 2.20 | 1.70 | 0.52 | ||
| 15 | 0.44 | 1.11 | 1.61 | 1.61 | 0.84 | 15 | 1.10 | 1.81 | 2.29 | 1.82 | 0.65 | ||
| 16 | 0.41 | 1.12 | 1.67 | 1.71 | 0.95 | 16 | 1.06 | 1.83 | 2.35 | 1.90 | 0.71 | ||
| 17 | 0.34 | 1.12 | 1.70 | 1.76 | 1.01 | 17 | 0.92 | 1.73 | 2.27 | 1.83 | 0.60 | ||
| 18 | 0.19 | 1.01 | 1.61 | 1.69 | 0.93 | 18 | 0.62 | 1.47 | 2.04 | 1.60 | 0.35 | ||
| 19 | −0.09 | 0.78 | 1.41 | 1.50 | 0.73 | 19 | 0.30 | 1.19 | 1.82 | 1.40 | 0.14 | ||
| 20 | −0.40 | 0.50 | 1.15 | 1.29 | 0.52 | 20 | 0.00 | 0.97 | 1.61 | 1.22 | −0.04 | ||
| Battery Voltage | 330 V | 310 V | |
|---|---|---|---|
| Reference motor average power | UDDS | 3.33 kW | 3.31 kW |
| HWFET | 10.81 kW | 10.86 kW | |
| Tap-change motor average power | UDDS | 3.27 kW | 3.27 kW |
| HWFET | 10.65 kW | 10.63 kW | |
| Energy consumption reduction rate | UDDS | 1.84% | 1.16% |
| HWFET | 1.53% | 2.15% | |
| Comb. | 1.70% | 1.60% | |
| Calculated energy consumption reduction rate (Table 2) | UDDS | 1.61% | 1.76% |
| HWFET | 1.74% | 3.06% | |
| Comb. | 1.67% | 2.35% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, J.-K.; Gu, B.-G.; Im, S.-H.; Kim, R.-Y. Design of Stator Winding Turn Number of Tap-Change PMSM for EVs According to Driving Cycles. Energies 2023, 16, 412. https://doi.org/10.3390/en16010412
Lim J-K, Gu B-G, Im S-H, Kim R-Y. Design of Stator Winding Turn Number of Tap-Change PMSM for EVs According to Driving Cycles. Energies. 2023; 16(1):412. https://doi.org/10.3390/en16010412
Chicago/Turabian StyleLim, Jong-Kyong, Bon-Gwan Gu, Seong-Hwan Im, and Rae-Young Kim. 2023. "Design of Stator Winding Turn Number of Tap-Change PMSM for EVs According to Driving Cycles" Energies 16, no. 1: 412. https://doi.org/10.3390/en16010412