
A Fault Diagnosis Algorithm for the Dedicated Equipment Based on the CNN-LSTM Mechanism


Abstract
:1. Introduction
- (1)
- Deep belief network
- (2)
- Generative adversarial network
- (3)
- Recurrent neural network
- (4)
- Convolutional neural network
- (1)
- Dedicated equipment is the core equipment that determines the normal operation of special vehicles and is widely used in various types of vehicles. In previous studies, due to the difficulty in data acquisition of dedicated equipment, classical machine learning algorithms were mainly adopted. In this paper, fault data were obtained through a simulation platform and the deep learning method was adopted for fault diagnosis research of dedicated equipment.
- (2)
- This paper presents a fault diagnosis model for dedicated equipment based on CNN-LSTM. LSTM is added to the traditional CNN so that the spatial–temporal features of the data can be extracted. In addition, CBAM is used to enhance the capability of extracting critical features.
- (3)
- In this paper, the model is trained and verified by using the data of the hardware-in-loop simulation platform of dedicated equipment. By verifying the parameters of the proposed model and analyzing the fault classification process, it is proved that the fault diagnosis model has a good classification effect on the fault problems of dedicated equipment. By comparing with different models, it is proved that the proposed method is a potential solution to the fault diagnosis problem for dedicated equipment.
2. Theoretical Introduction and Analysis
2.1. Convolutional Neural Network
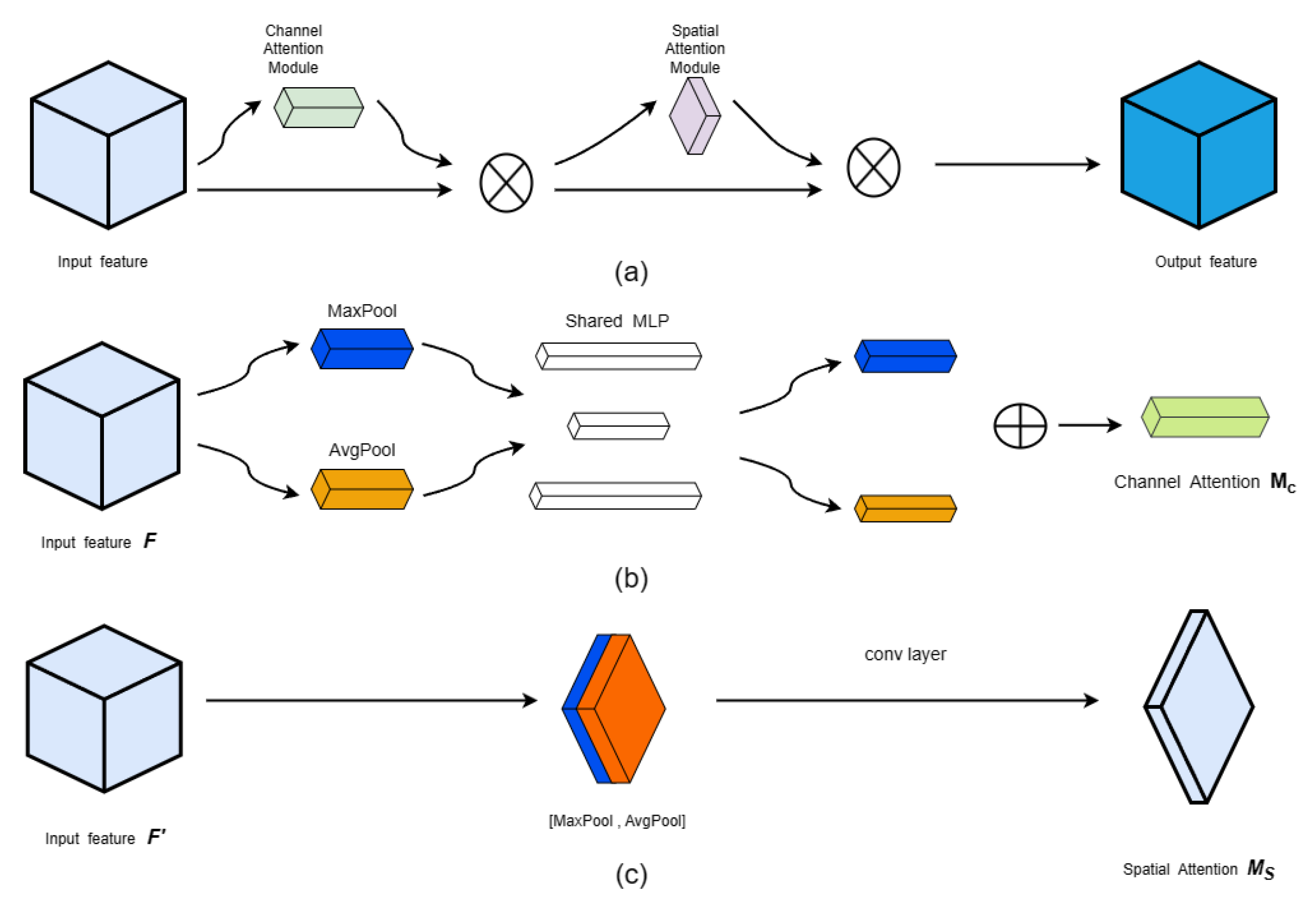
2.2. CBAM
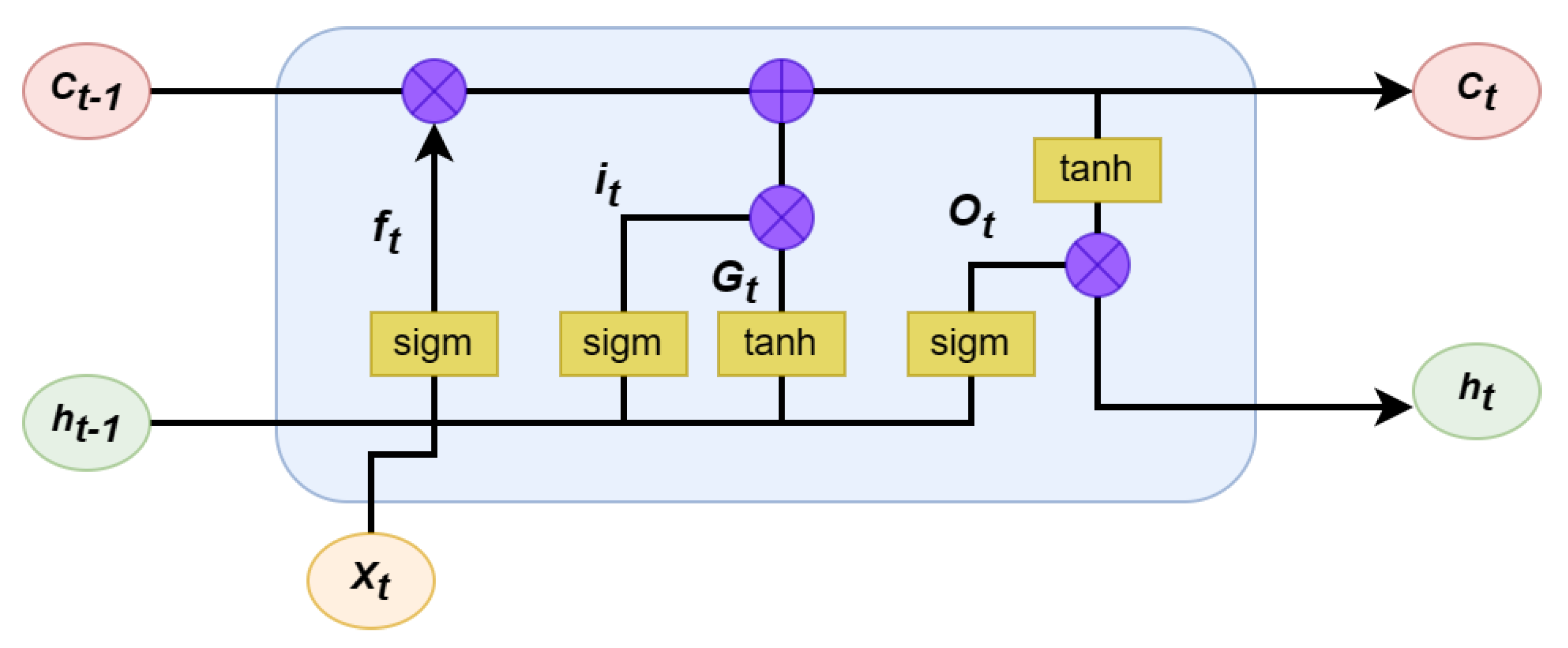
2.3. LSTM
3. Fault Diagnosis Model Based on CNN-LSTM
3.1. Fault Diagnosis Model Architecture Based on CNN-LSTM
3.2. Fault Model Training Process
4. Analysis and Verification
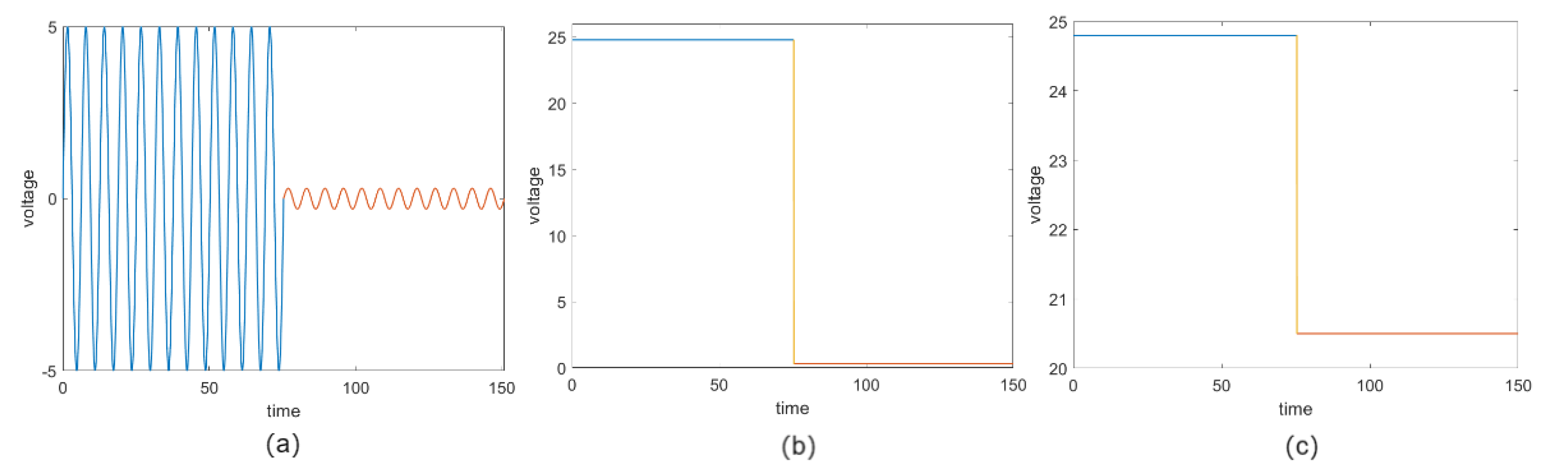
4.1. Fault Data Acquisition and Preprocessing
4.2. Result Analysis
4.2.1. Discussion of Model Parameters
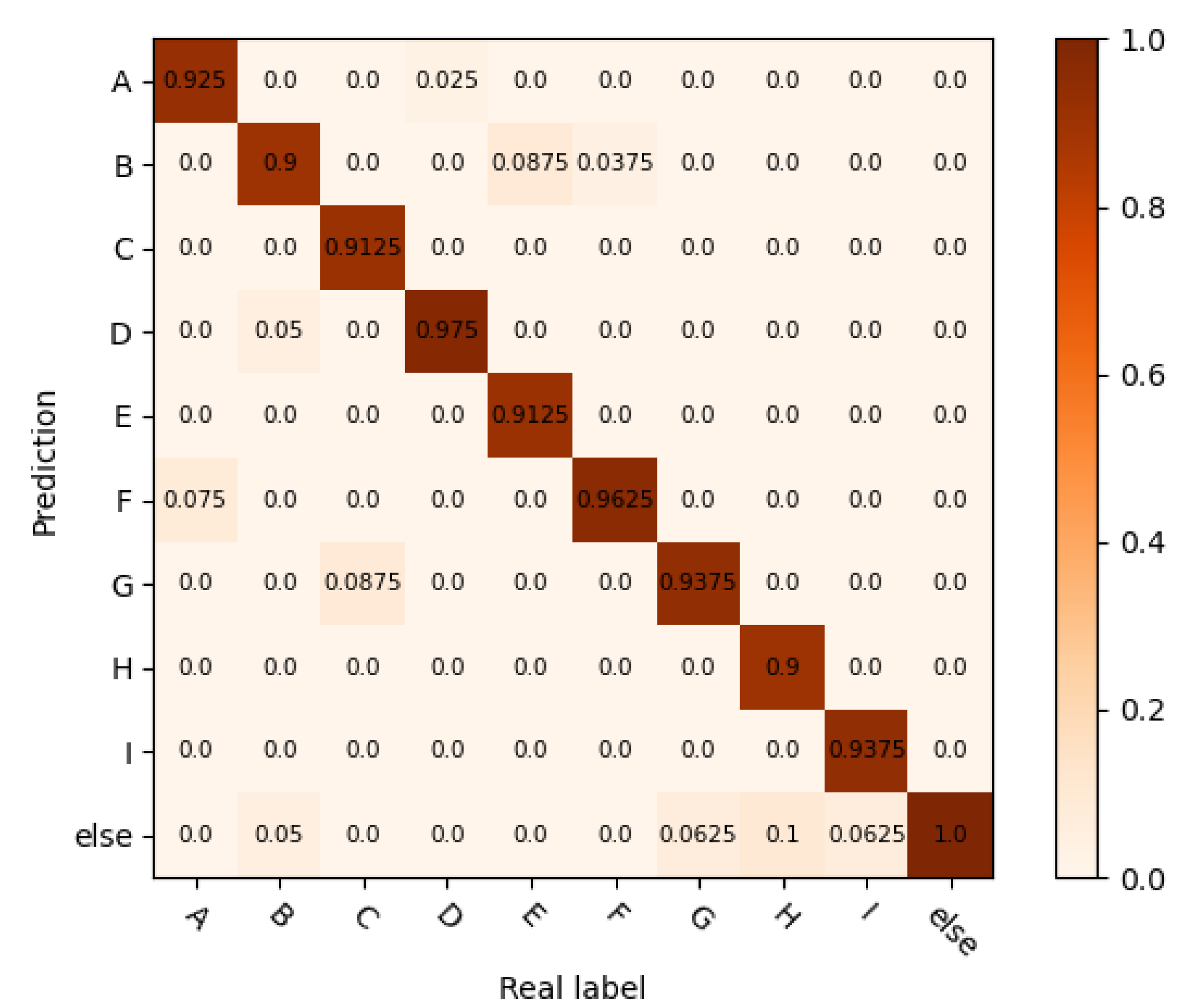
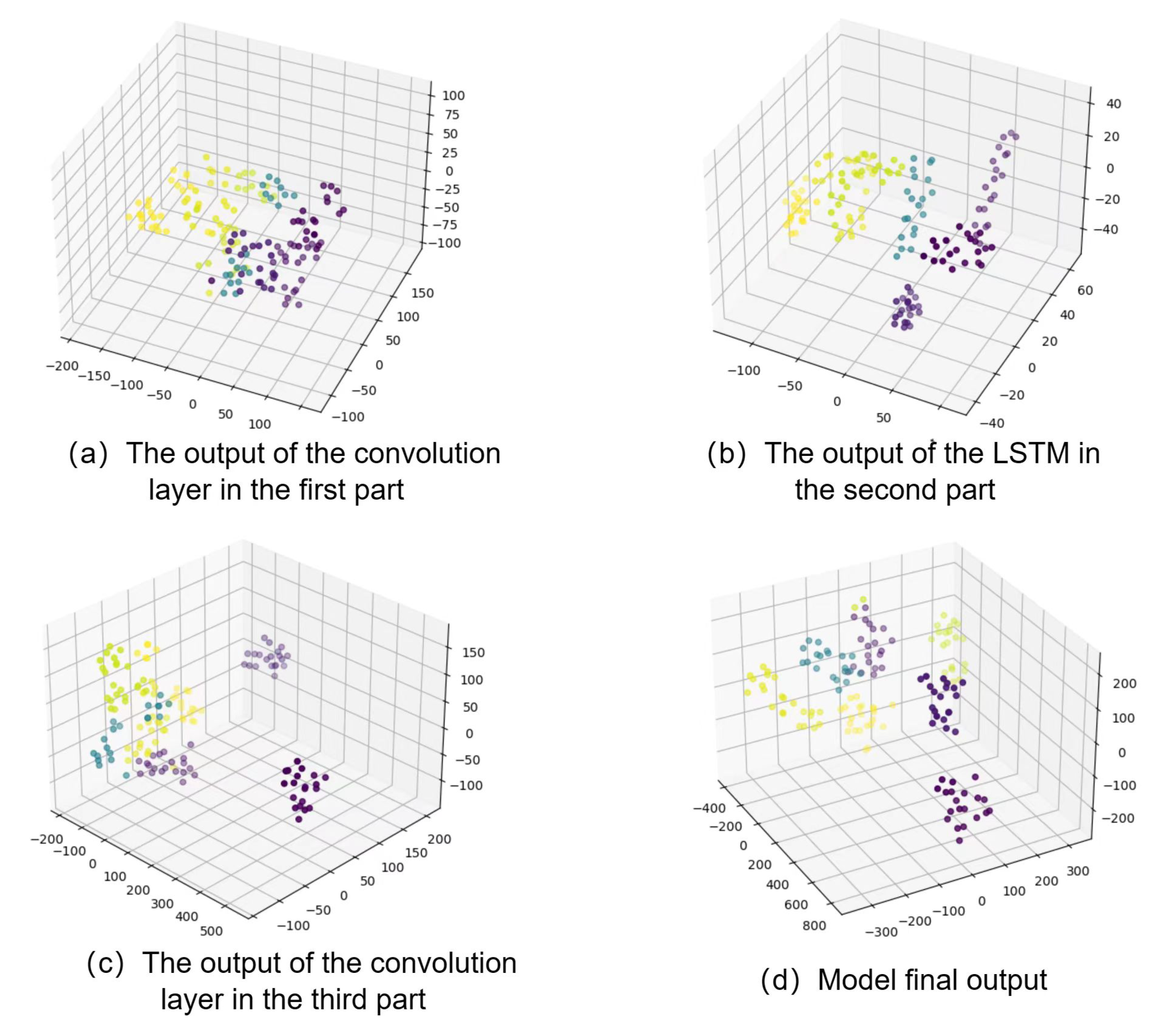
4.2.2. Verification of Model Results
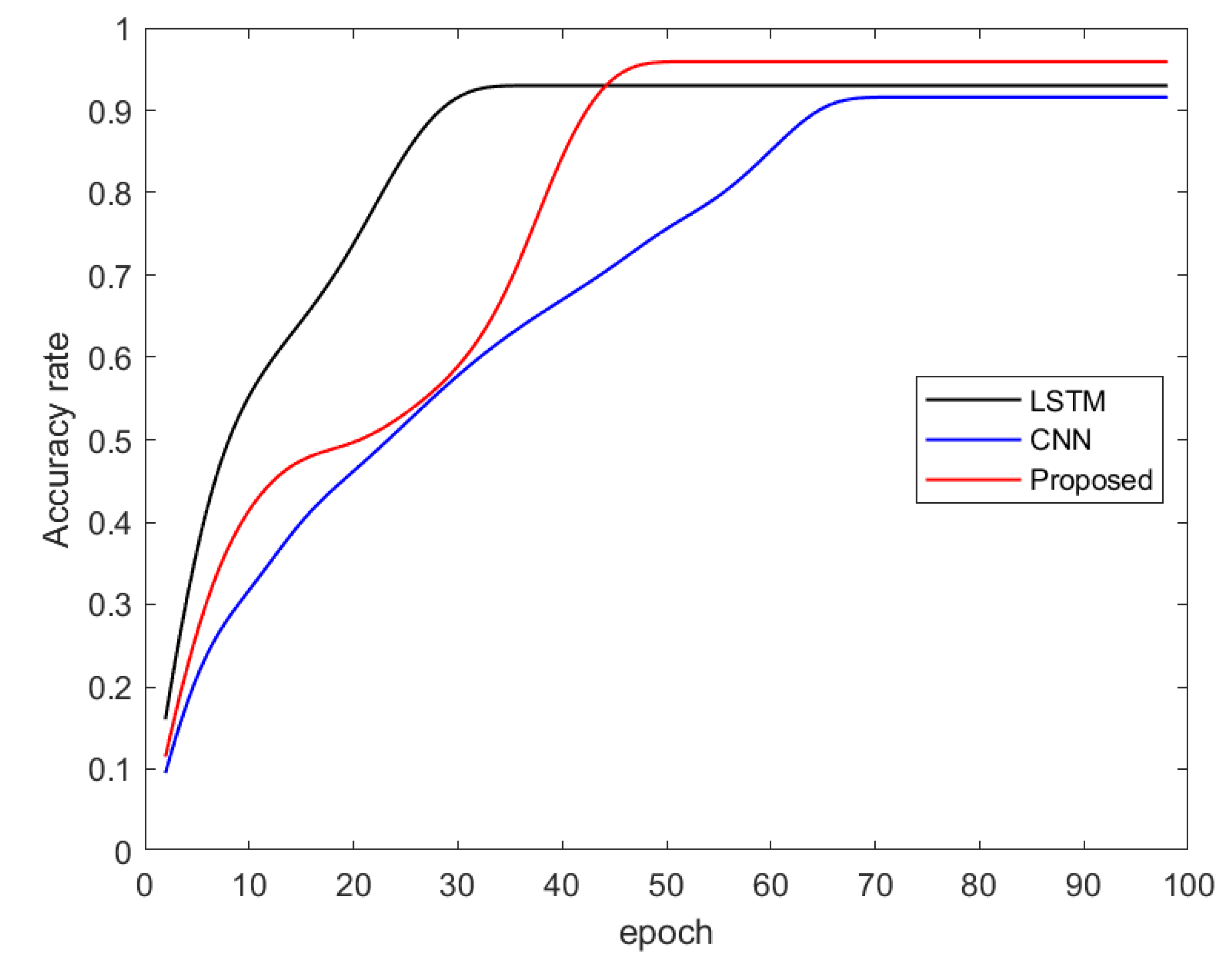
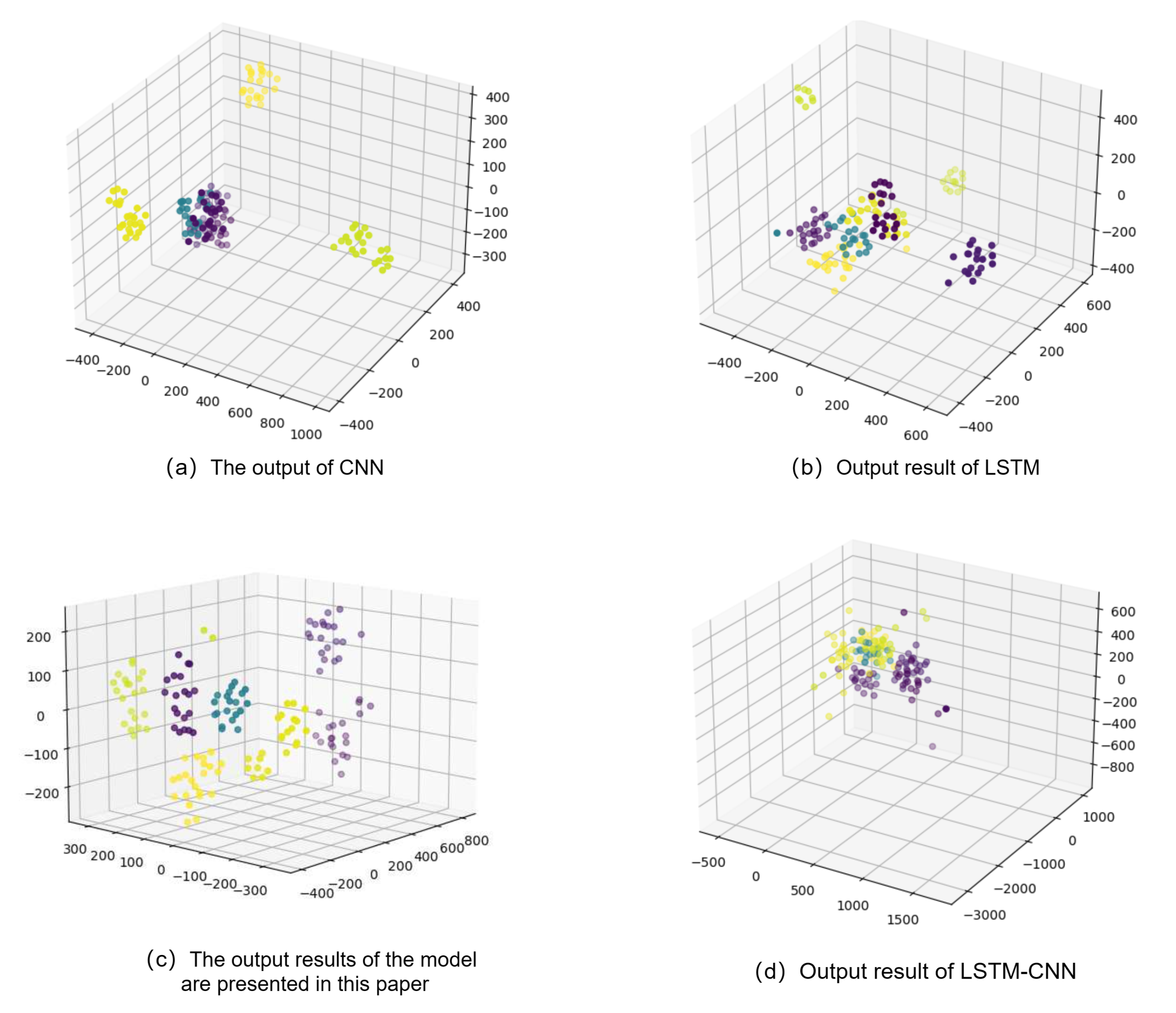
4.2.3. Model Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, W.; Li, X.; Ding, Q. Deep residual learning-based fault diagnosis method for rotating machinery. ISA Trans. 2019, 95, 295–305. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Hu, K.; Sun, X.; Ma, Y. Nonlinear Control of Quadrotor for Fault Tolerance: A Total Failure of One Actuator. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 2810–2820. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Guo, L.; Lin, J.; Xing, S. A neural network constructed by deep learning technique and its application to intelligent fault diagnosis of machines. Neurocomputing 2018, 272, 619–628. [Google Scholar] [CrossRef]
- Wang, Y.; Li, C.; Feng, J. Distributed pinning controllers design for set stabilization of k-valued logical control networks. Math. Model. Control 2023, 3, 61–72. [Google Scholar] [CrossRef]
- Young, C.C.; Yang, H.K. Fault detection in a ball bearing system using minimum variance spectrum. Meas. Sci. Technol. 2007, 18, 1433–1440. [Google Scholar]
- Yang, Y.; Yu, D.; Cheng, J. A fault diagnosis approach for roller bearing based on IMF envelope spectrum and SVM. Measurement 2007, 40, 943–950. [Google Scholar] [CrossRef]
- Klausen, A.; Robbersmyr, K.G.; Karimi, H.R. Autonomous Bearing Fault Diagnosis Method based on Envelope Spectrum. IFAC-PapersOnLine 2017, 40, 13378–13383. [Google Scholar] [CrossRef]
- Li, Y.; Wang, A.; Yi, X. Fire control system operation status assessment based on information fusion: Case study. Sensors 2019, 19, 2222. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.; Yang, L.; Chen, H.; Xin, L. Fault diagnosis method for rolling bearing based on VMD and improved SVM optimized by METLBO. J. Mech. Sci. Technol. 2022, 36, 4979–4991. [Google Scholar] [CrossRef]
- Li, Y.; Song, L.; Sun, Q.; Xu, H.; Li, X.; Fang, Z.; Yao, W. Rolling bearing fault diagnosis based on quantum LS-SVM. EPJ Quantum Technol. 2022, 9, 1–15. [Google Scholar] [CrossRef]
- Mansouri, M.; Dhibi, K.; Nounou, H.; Nounou, M. Interval-Valued SVM Based ABO for Fault Detection and Diagnosis of Wind Energy Conversion Systems. IEEE Access 2022, 10, 130406–130414. [Google Scholar] [CrossRef]
- Cheng, J.; Feng, Z.; Xiong, Y. Transformer Fault Diagnosis Based on an Improved Sine Cosine Algorithm and BP Neural Network. Recent Adv. Electr. Electron. Eng. 2022, 15, 502–510. [Google Scholar]
- Hu, M.; Wu, J.; Yang, J.; Zhang, L.; Yang, F. Fault diagnosis of robot joint based on BP neural network. Robotica 2022, 40, 4388–4404. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y.; Abu-Siada, A.; Chen, X.; Li, Z.; Xu, Y.; Zhang, L.; Tong, Y. Fault diagnosis of transformer windings based on decision tree and fully connected neural network. Energies 2021, 14, 1531. [Google Scholar] [CrossRef]
- Heaton, J.B.; Polson, N.G.; Witte, J.H. Deep learning for finance: Deep portfolios. Appl. Stoch. Model. Bus. Ind. 2017, 33, 3–12. [Google Scholar] [CrossRef]
- Shafay, M.; Ahmad, R.W.; Salah, K.; Yaqoob, I.; Jayaraman, R.; Omar, M. Blockchain for deep learning: Review and open challenges. Clust. Comput. 2023, 26, 197–221. [Google Scholar] [CrossRef]
- Alabdulkreem, E.; Alotaibi, S.S.; Alamgeer, M.; Marzouk, R.; Hilal, A.M.; Motwakel, A.; Zamani, A.S.; Rizwanullah, M. Intelligent Cybersecurity Classification Using Chaos Game Optimization with Deep Learning Model. Comput. Syst. Sci. Eng. 2023, 45, 971–983. [Google Scholar] [CrossRef]
- Niu, G.; Wang, X.; Golda, M.; Mastro, S.; Zhang, B. An optimized adaptive PReLU-DBN for rolling element bearing fault diagnosis. Neurocomputing 2021, 445, 26–34. [Google Scholar] [CrossRef]
- Gao, S.; Xu, L.; Zhang, Y.; Pei, Z. Rolling bearing fault diagnosis based on SSA optimized self-adaptive DBN. ISA Trans. 2022, 128, 485–502. [Google Scholar] [CrossRef]
- Van Tung, T.; AlThobiani, F.; Ball, A. An approach to fault diagnosis of reciprocating compressor valves using Teager-Kaiser energy operator and deep belief networks. Expert Syst. Appl. 2014, 41, 4113–4122. [Google Scholar] [CrossRef]
- Zhou, F.; Yang, S.; Fujita, H.; Chen, D.; Wen, C. Deep learning fault diagnosis method based on global optimization GAN for unbalanced data. Knowl.-Based Syst. 2020, 187, 104837. [Google Scholar] [CrossRef]
- Pham, M.T.; Kim, J.; Kim, C.H. Rolling Bearing Fault Diagnosis Based on Improved GAN and 2-D Representation of Acoustic Emission Signals. IEEE Access 2022, 10, 78056–78069. [Google Scholar] [CrossRef]
- Han, S.; Zhang, S.; Li, Y.; Chen, L. The multilabel fault diagnosis model of bearing based on integrated convolutional neural network and gated recurrent unit. Int. J. Intell. Comput. Cybern. 2022, 15, 401–413. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, T.; Huang, X.; Cao, L.; Zhou, Q. Fault diagnosis of rotating machinery based on recurrent neural networks. Measurement 2021, 171, 108774. [Google Scholar] [CrossRef]
- Jalayer, M.; Orsenigo, C.; Vercellis, C. Fault detection and diagnosis for rotating machinery: A model based on convolutional LSTM, Fast Fourier and continuous wavelet transforms. Comput. Ind. 2021, 125, 103378. [Google Scholar] [CrossRef]
- Lei, J.; Liu, C.; Jiang, D. Fault diagnosis of wind turbine based on Long Short-term memory networks. Renew. Energy 2019, 133, 422–432. [Google Scholar] [CrossRef]
- Xiang, L.; Wang, P.; Yang, X.; Hu, A.; Su, H. Fault detection of wind turbine based on SCADA data analysis using CNN and LSTM with attention mechanism. Measurement 2021, 175, 109094. [Google Scholar] [CrossRef]
- Agarwal, P.; Gonzalez, J.I.M.; Elkamel, A.; Budman, H. Hierarchical Deep LSTM for Fault Detection and Diagnosis for a Chemical Process. Processes 2022, 10, 2557. [Google Scholar] [CrossRef]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation Applied to Handwritten Zip Code Recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Sinitsin, V.; Ibryaeva, O.; Sakovskaya, V.; Eremeeva, V. Intelligent bearing fault diagnosis method combining mixed input and hybrid CNN-MLP model. Mech. Syst. Signal Process. 2022, 180, 109454. [Google Scholar] [CrossRef]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional Neural Network Based Fault Detection for Rotating Machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Yan, X.; Zhang, Y.; Jin, Q. Chemical Process Fault Diagnosis Based on Improved ResNet Fusing CBAM and SPP. IEEE Access 2023, 11, 46678–46690. [Google Scholar] [CrossRef]
- Zhang, L.; Duan, L. Cross-scenario transfer diagnosis of reciprocating compressor based on CBAM and ResNet. J. Intell. Fuzzy Syst. 2022, 43, 5929–5943. [Google Scholar] [CrossRef]
- Zhang, P.J.; Bo, Y.C.; Wang, H.Y.; Li, Q. Fault Diagnosis System of the Fire Control System Based on Fuzzy Neural Network. Adv. Mater. Res. 2013, 605, 828–831. [Google Scholar] [CrossRef]
- Zhang, C.; Feng, Q.; Bai, Z. Probabilistic Neural Network Application in Fault Diagnosis of Airborne Fire Control System. In Proceedings of the First Symposium on Aviation Maintenance and Management-Volume I; Springer: Berlin/Heidelberg, Germany, 2014; pp. 235–242. [Google Scholar]
- Li, Y.; Hu, X.; Yao, Z.; Zhang, Y. Fault diagnosis of fire control system based on genetic algorithm optimized BP neural network. In Proceedings of the 2022 Prognostics and Health Management Conference, London, UK, 27–29 May 2022; pp. 11–16. [Google Scholar]
- Mo, Y.; Xia, K.; Wang, H.; Su, H. Diagnosis Method Based on LSTM-CNN for Arc Fault in Brush and Slip Ring of Doubly-fed Induction Generator. Control Eng. China 2022, 29, 1520–1527. [Google Scholar]
- Chen, Z.; Mauricio, A.; Li, W.; Gryllias, K. A deep learning method for bearing fault diagnosis based on cyclic spectral coherence and convolutional neural networks. Mech. Syst. Signal Process. 2020, 140, 106683. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Layer | Kernel Size | Number of Kernels | Step Size |
|---|---|---|---|
| Cov | 5 | 8 | 1 |
| Pool | 3 | 1 | |
| LSTM | 16 | ||
| Cov | 5 | 16 | 1 |
| Pool | 3 | 1 | |
| LSTM | 8 |
| Signal | Signal Value/V |
|---|---|
| 1 | 23.4–28.6 |
| 2 | 21.4–30.6 |
| 3 | 23.4–28.6 |
| 4 | 21.4–30.6 |
| 5 | 21.4–30.6 |
| 6 | 21.4–30.6 |
| 7 | −4.5–5.5 |
| 8 | 23.4–28.6 |
| Number of Kernels | Dataset A | Dataset B | Dataset C |
|---|---|---|---|
| 8-10-8 | 91.15% | 90.89% | 90.7% |
| 8-10-16 | 88.1% | 87.3% | 87.8% |
| 8-16-8 | 94.37% | 93.98% | 94.52% |
| 8-16-32 | 3% | 3% | 3% |
| 8-32-16 | 3% | 3% | 3% |
| Model Number | Model Name | Accuracy Rate |
|---|---|---|
| 1 | Proposed | 95.9% |
| 2 | LSTM | 93.0% |
| 3 | LSTM-CNN | 92.2% |
| 4 | CNN | 92.4% |
| 5 | ResNet | 75.2% |
| 6 | WDCNN | 90.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Hao, Y.; Shi, H.; Wu, Z.; Wu, Y.; Sun, X. A Fault Diagnosis Algorithm for the Dedicated Equipment Based on the CNN-LSTM Mechanism. Energies 2023, 16, 5230. https://doi.org/10.3390/en16135230
Guo Z, Hao Y, Shi H, Wu Z, Wu Y, Sun X. A Fault Diagnosis Algorithm for the Dedicated Equipment Based on the CNN-LSTM Mechanism. Energies. 2023; 16(13):5230. https://doi.org/10.3390/en16135230
Chicago/Turabian StyleGuo, Zhannan, Yinlin Hao, Hanwen Shi, Zhenyu Wu, Yuhu Wu, and Ximing Sun. 2023. "A Fault Diagnosis Algorithm for the Dedicated Equipment Based on the CNN-LSTM Mechanism" Energies 16, no. 13: 5230. https://doi.org/10.3390/en16135230
APA StyleGuo, Z., Hao, Y., Shi, H., Wu, Z., Wu, Y., & Sun, X. (2023). A Fault Diagnosis Algorithm for the Dedicated Equipment Based on the CNN-LSTM Mechanism. Energies, 16(13), 5230. https://doi.org/10.3390/en16135230