
An Improved Optimally Designed Fuzzy Logic-Based MPPT Method for Maximizing Energy Extraction of PEMFC in Green Buildings
 ,
,  , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
- A new FLC MPPT control method for PEMFCs is proposed in this paper for maximizing energy extraction in green buildings. The proposed FLC MPPT method employs the rate-of-change of PEMFC power with current () instead of the widely-used rate of change of the power with voltage () in the classical FLC MPPT method. Employing in the proposed method enables the fast-tracking of MPPT control with reduced steady-state power oscillations.
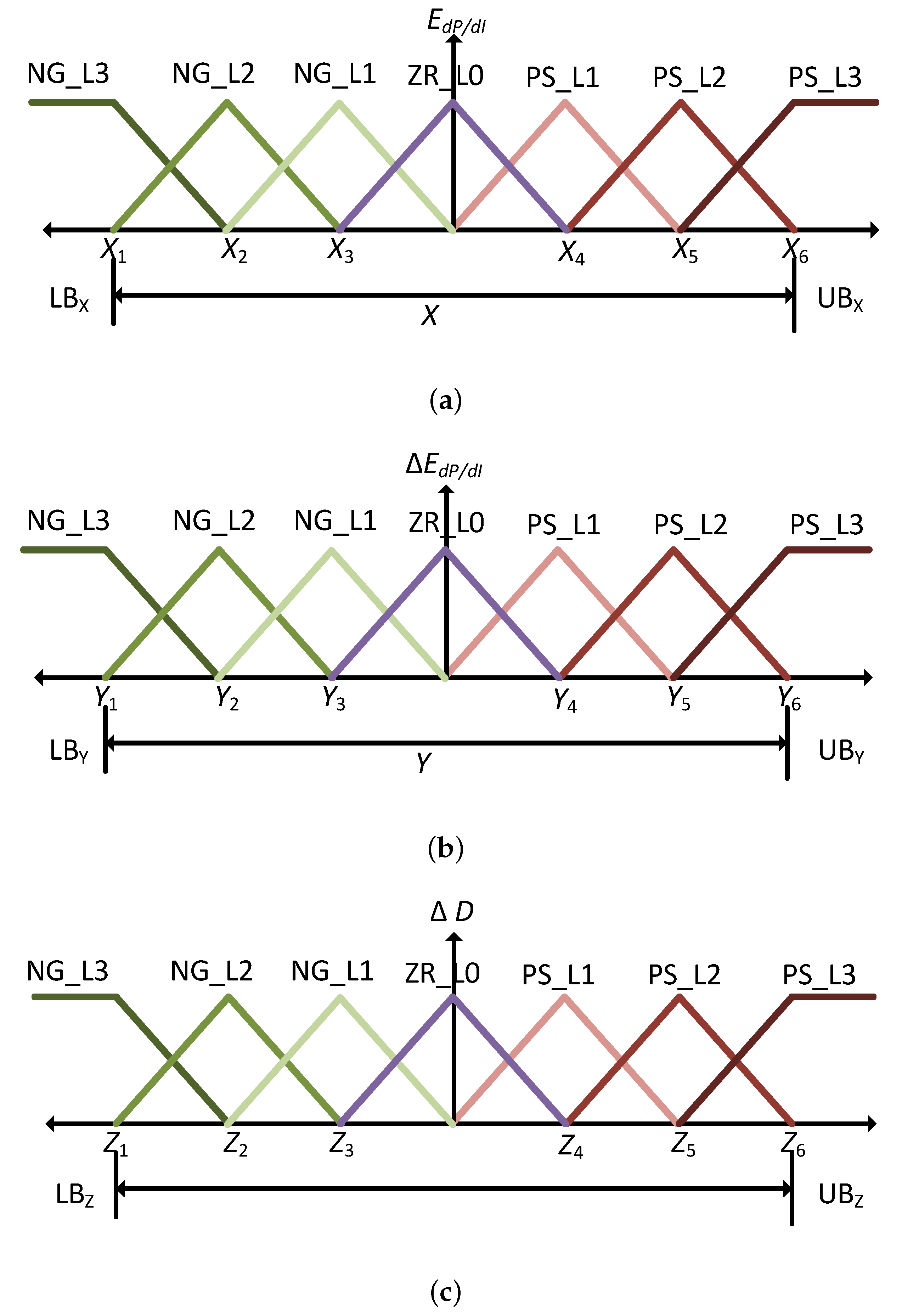
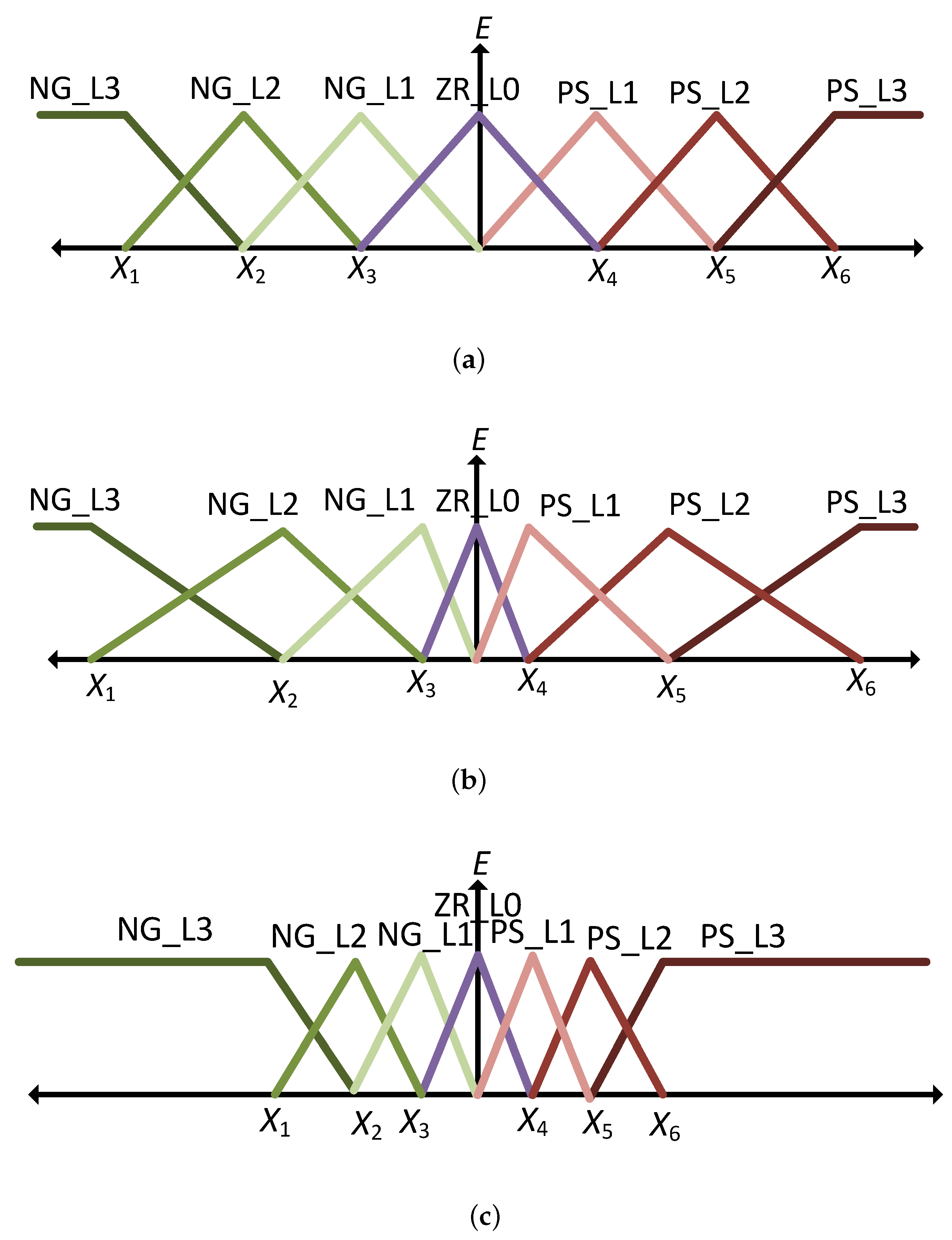
- An improved design method for FLC MFs is presented in the proposed modified FLC MPPT method. The proposed FLC design adds more flexibility in designing input/output MFs through the proper selection of their shapes, type, boundaries, and locations of points.
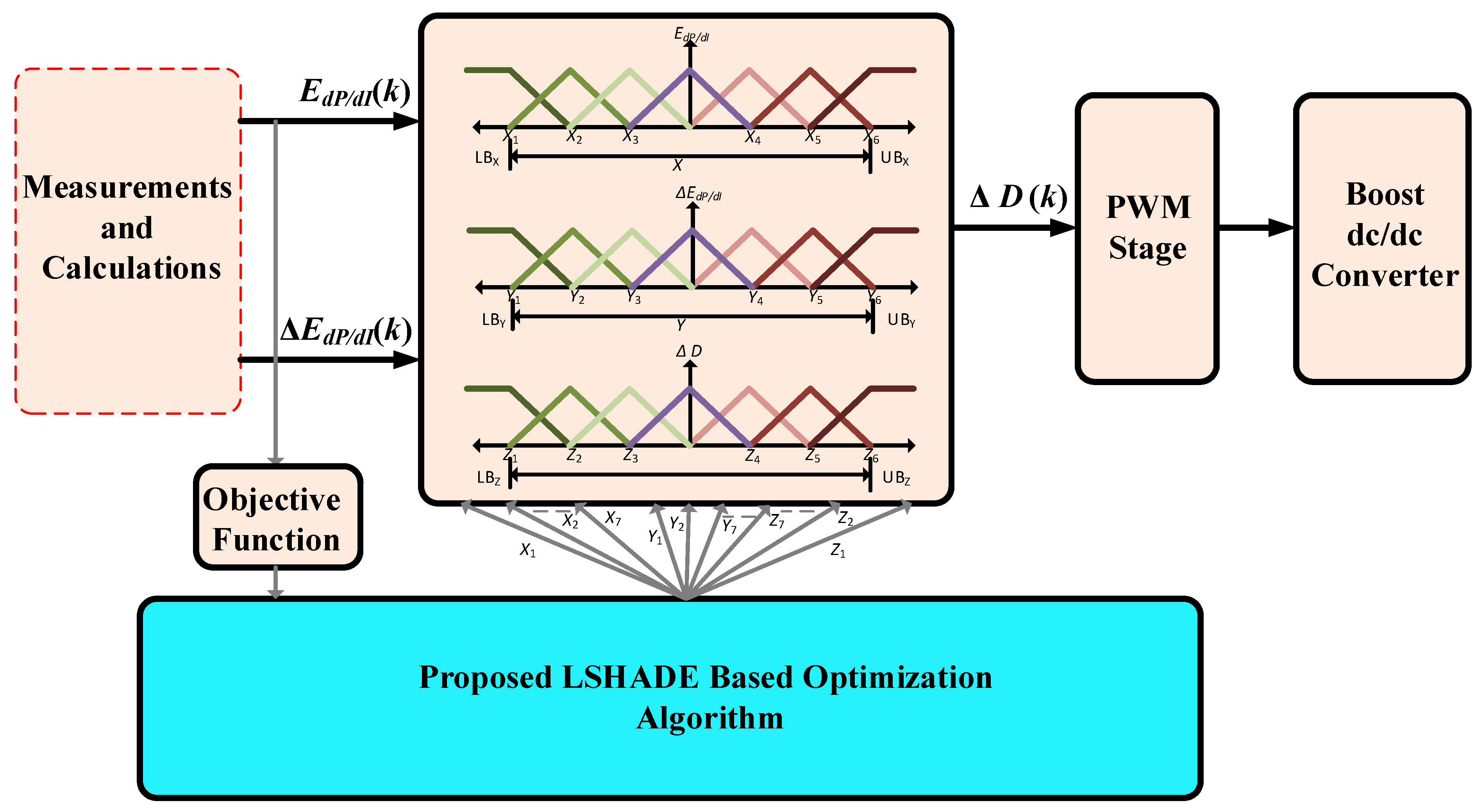
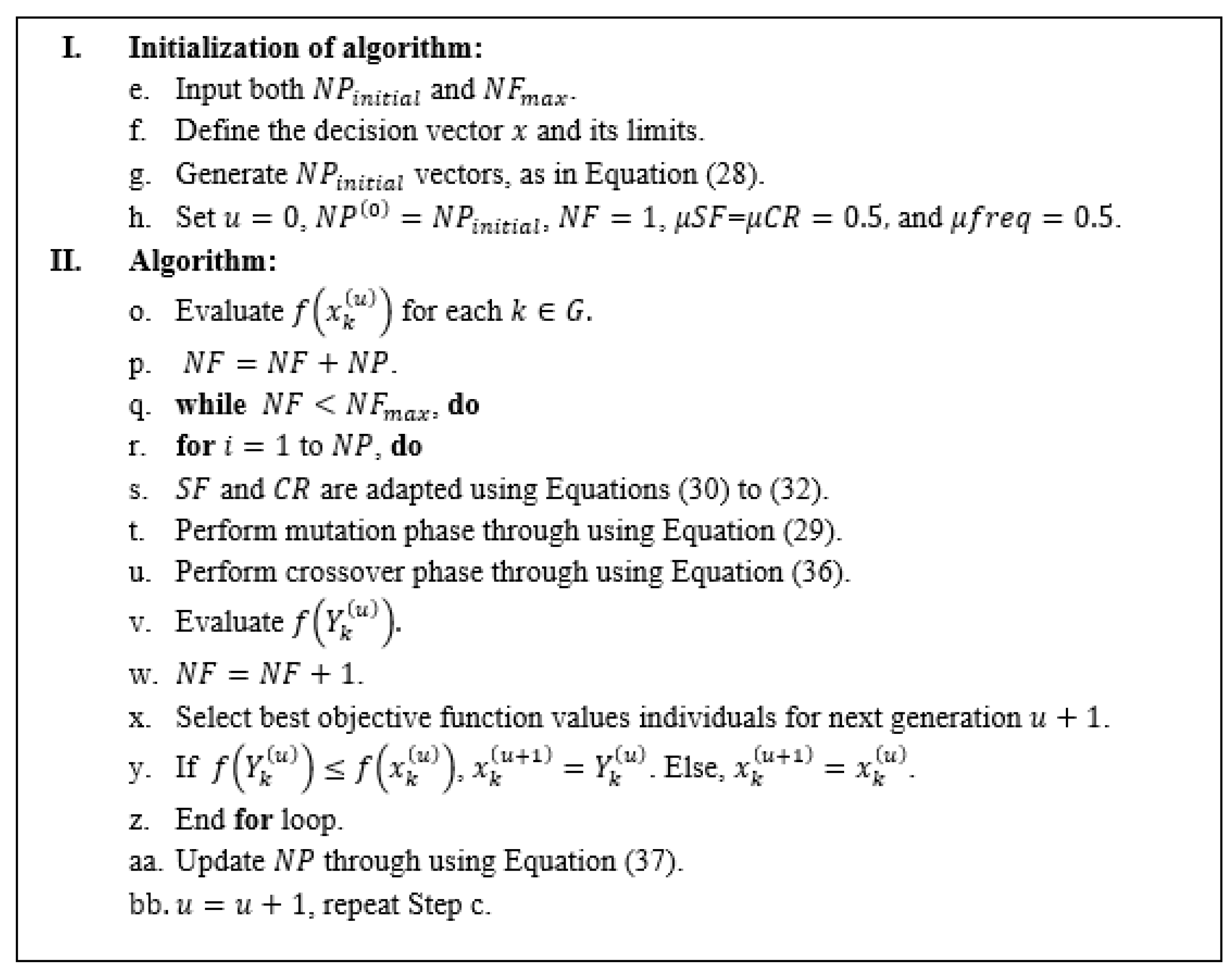
- A new application of an enhanced version of success-history-based adaptive differential evolution (SHADE) with linear population size reduction, known as LSHADE algorithm, for simultaneous determination of FLC design parameters in the proposed MPPT method. The proposed optimization process enables higher adaptiveness, robustness, and MPPT control for the whole range.
2. PEMFC in Green Building
2.1. Overview of General Structure
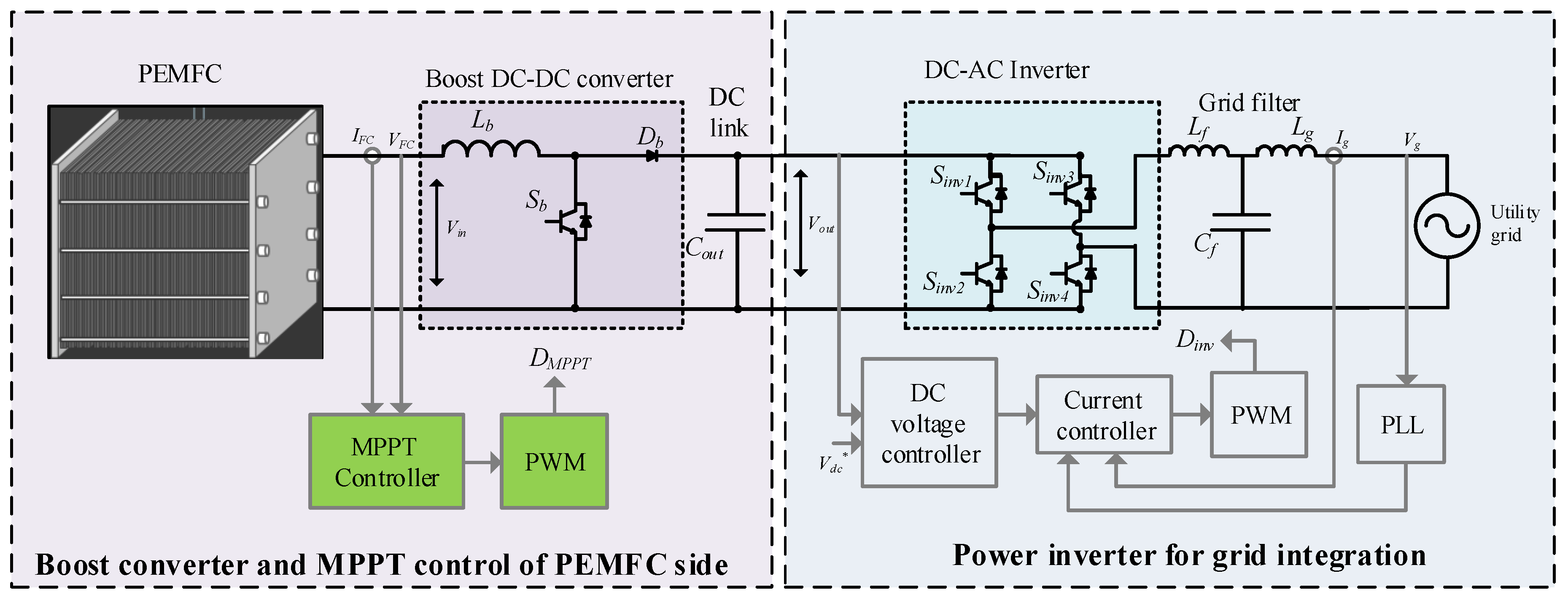
2.2. PEMFC Power Conversion System
3. Mathematical Representations of PEMFC Model
3.1. Representation of Gas Transport Dynamics
3.2. Polarization Curve Representation
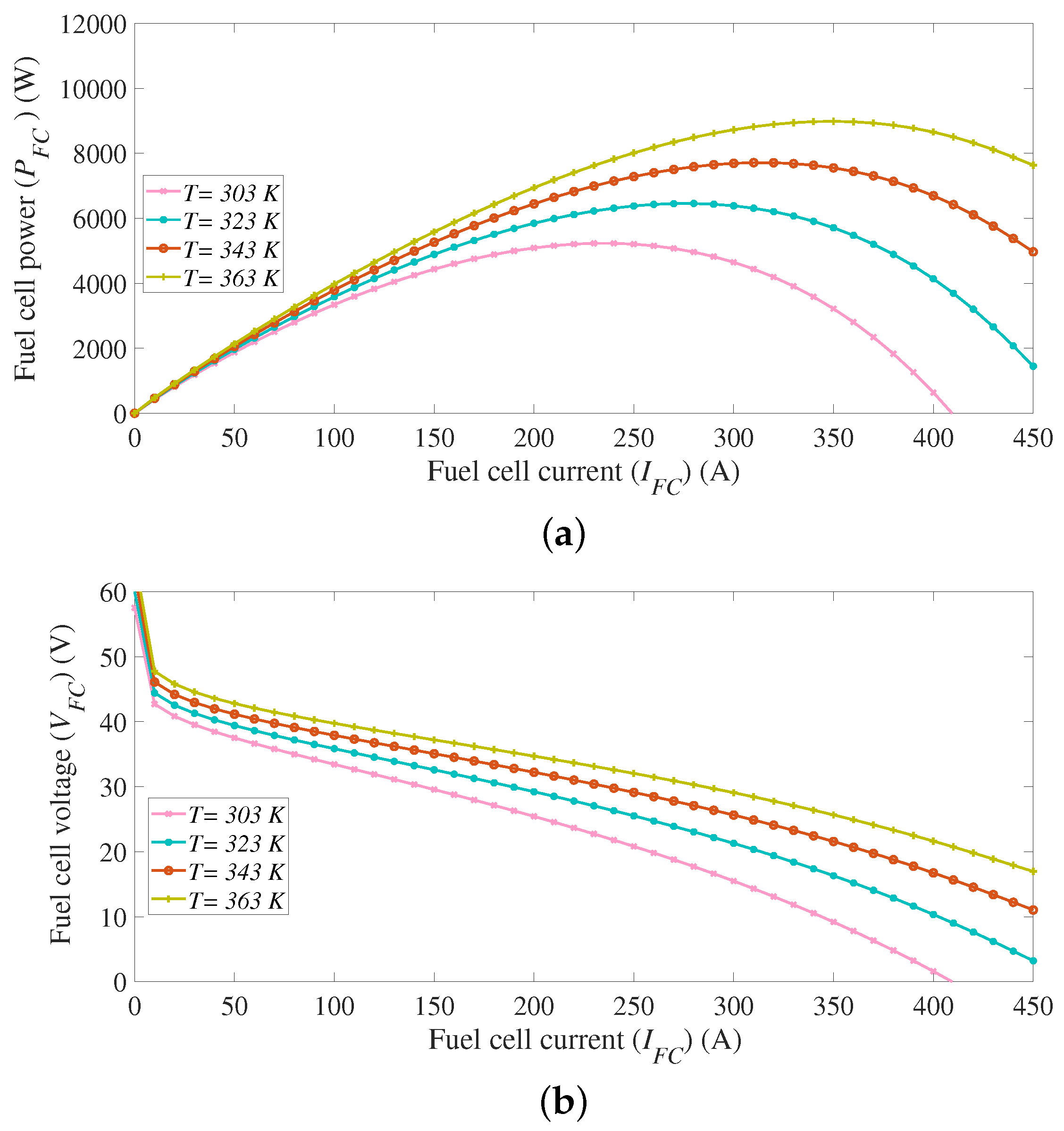
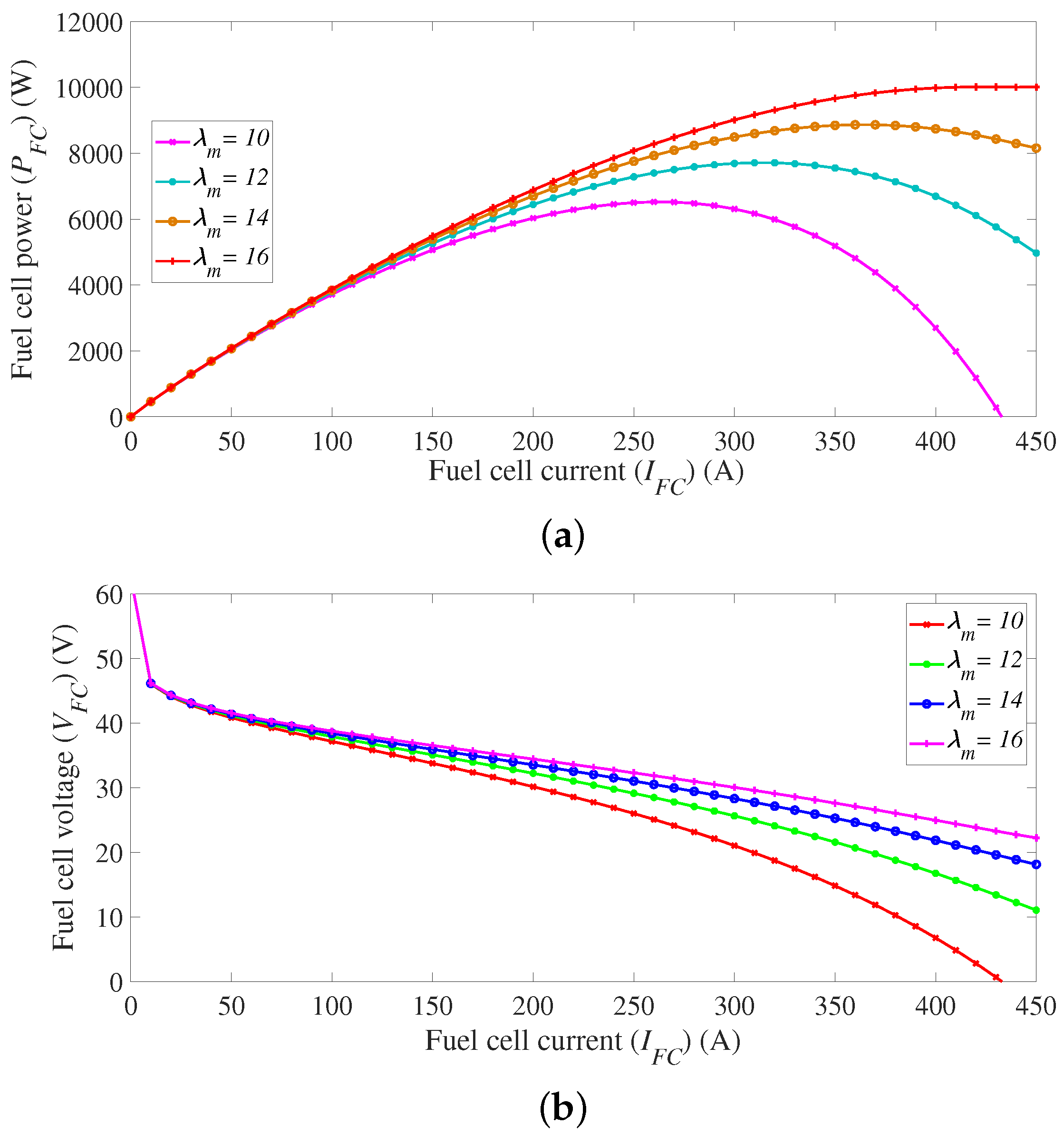
3.3. PEMFC Model Characteristics
4. Conventional FLC MPPT
- 1
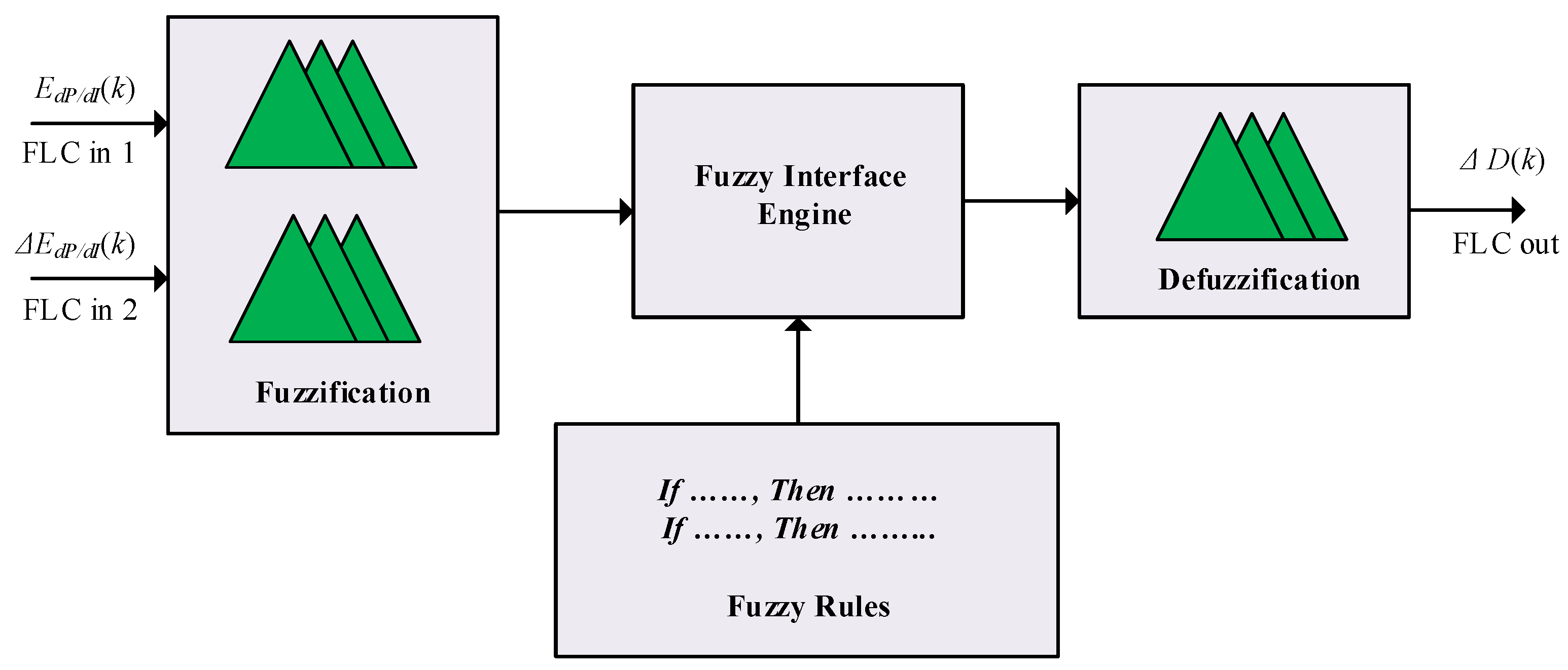
- Fuzzification stage: The crisp inputted variables are converted into linguistic labels based on the predefined membership functions (MFs) of input variables. The obtained linguistic labels are utilized in this first step to represent the fuzzy inputs for generating verbal decisions.
- 2
- Fuzzy inference engine: The fuzzy-based interface engine uses fuzzy inputs through the if–then rule concept for generating fuzzy outputs.
- 3
- Defuzzification: The conversion of obtained fuzzy outputs is made into crisp values [47]. In MPPT FLC applications, the two input variables are employed for generating one output variable to operate the boost power converter system at the desired MPPT operating point.
5. Proposed Based FLC MPPT Method
5.1. Operating Principle
5.2. Controller Structure
5.3. FLC MPPT Design Optimization
5.4. LSHADE-Based Design Optimization
6. Results, Discussions, and Performance Comparisons
- Scenario 1: Step decrease in membrane water content and constant temperature T.
- Scenario 2: Step increase in and constant T.
- Scenario 3: Step decrease in T and constant .
- Scenario 4: Step increase in T and constant .
- Scenario 5: Inrush conditions.
6.1. Scenario 1: Step Decrease in and Constant T
6.2. Scenario 2: Step Increase in and Constant T
6.3. Scenario 3: Step Decrease in T and Constant
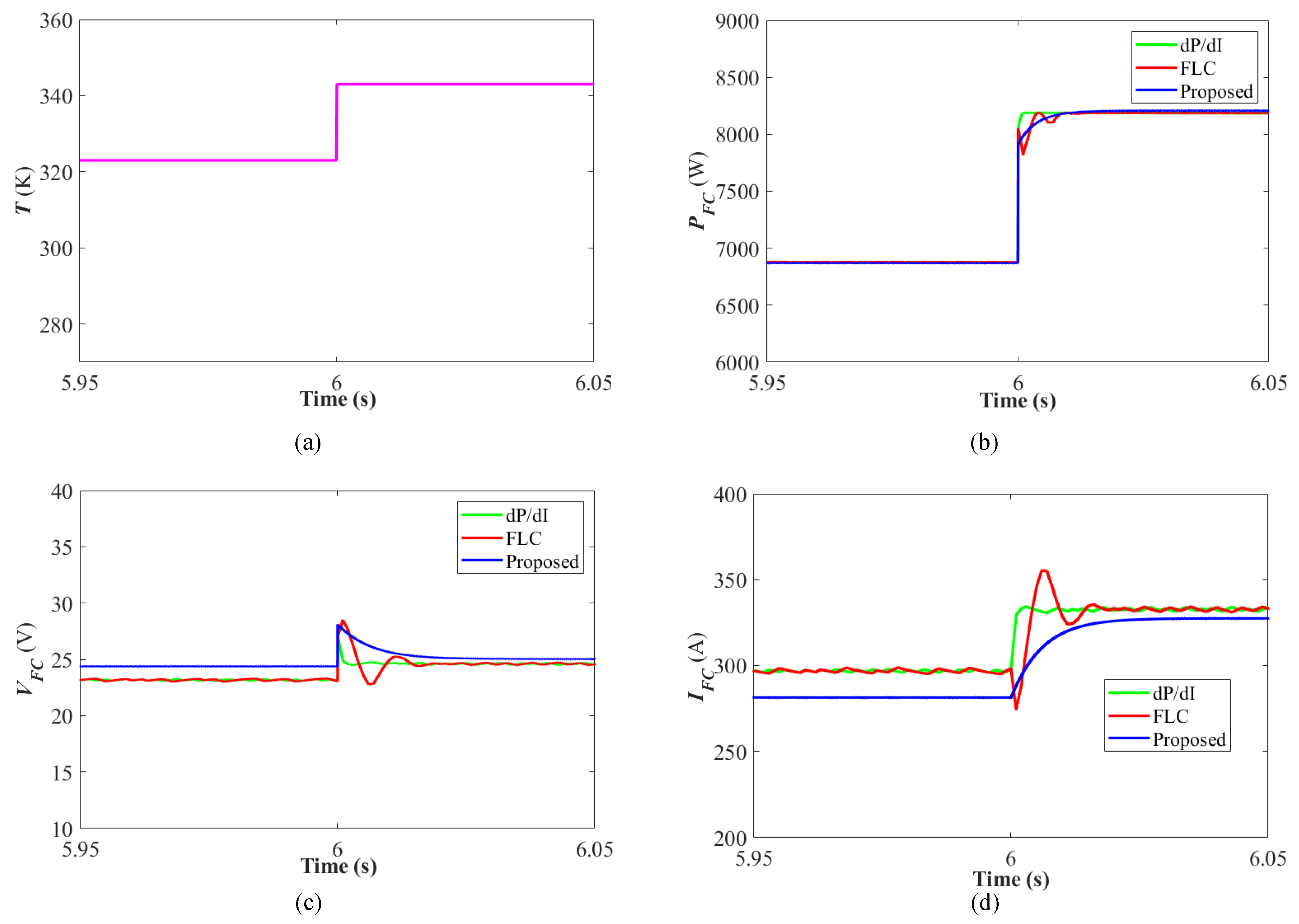
6.4. Scenario 4: Step Increase in T and Constant
6.5. Scenario 5: Inrush Conditions
6.6. Discussion and Performance Comparison
7. Conclusions
- The proposed FLC MPPT method achieves faster tracking of the MPP operating point with reduced oscillations due to employing in the FLC design. The proposed MPPT scheme achieves lower fluctuations and oscillations in the outputted waveforms from PEMFCs.
- The obtained results show the accurate and fast tracking for the MPP of PEMFCs using the proposed method in various expected operating scenarios.
- Moreover, low peak overshoot/undershoot values are obtained through applying the proposed optimized MPPT control scheme at the various studied step change increase/decrease of temperature and/or the membrane water content.
- Additionally, more flexibility and freedom are obtained from using the FLC with more possibility for optimally designing its membership functions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Banihabib, R.; Assadi, M. The Role of Micro Gas Turbines in Energy Transition. Energies 2022, 15, 8084. [Google Scholar] [CrossRef]
- Rabbi, M.F.; Popp, J.; Máté, D.; Kovács, S. Energy Security and Energy Transition to Achieve Carbon Neutrality. Energies 2022, 15, 8126. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Aly, M.; Elmelegi, A.; Alharbi, A.G.; Ali, Z.M. Multifunctional Distributed MPPT Controller for 3P4W Grid-Connected PV Systems in Distribution Network with Unbalanced Loads. Energies 2019, 12, 4799. [Google Scholar] [CrossRef] [Green Version]
- Sulich, A.; Sołoducho-Pelc, L. Changes in Energy Sector Strategies: A Literature Review. Energies 2022, 15, 7068. [Google Scholar] [CrossRef]
- Elmelegi, A.; Aly, M.; Ahmed, E.M.; Alharbi, A.G. A simplified phase-shift PWM-based feedforward distributed MPPT method for grid-connected cascaded PV inverters. Sol. Energy 2019, 187, 1–12. [Google Scholar] [CrossRef]
- Nindartin, A.; Moon, H.W.; Park, S.J.; Lee, K.T.; Im, J.B.; Kim, J.H. Influencing of the Building Energy Policies upon the Efficiency of Energy Consumption: The Case of Courthouse Buildings in South Korea. Energies 2022, 15, 6679. [Google Scholar] [CrossRef]
- Meena, C.S.; Kumar, A.; Jain, S.; Rehman, A.U.; Mishra, S.; Sharma, N.K.; Bajaj, M.; Shafiq, M.; Eldin, E.T. Innovation in Green Building Sector for Sustainable Future. Energies 2022, 15, 6631. [Google Scholar] [CrossRef]
- Izam, N.S.M.N.; Itam, Z.; Sing, W.L.; Syamsir, A. Sustainable Development Perspectives of Solar Energy Technologies with Focus on Solar Photovoltaic—A Review. Energies 2022, 15, 2790. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, D.; Li, W.; Wang, Z.; Huang, Y.; You, Y.; Becker, S. Current technologies and challenges of applying fuel cell hybrid propulsion systems in unmanned aerial vehicles. Prog. Aerosp. Sci. 2020, 116, 100620. [Google Scholar] [CrossRef]
- Lü, X.; Wang, P.; Meng, L.; Chen, C. Energy optimization of logistics transport vehicle driven by fuel cell hybrid power system. Energy Convers. Manag. 2019, 199, 111887. [Google Scholar] [CrossRef]
- Vidović, T.; Tolj, I.; Radica, G.; Ćoko, N.B. Proton-Exchange Membrane Fuel Cell Balance of Plant and Performance Simulation for Vehicle Applications. Energies 2022, 15, 8110. [Google Scholar] [CrossRef]
- Fedorov, M.; Maslikov, V.; Korablev, V.; Politaeva, N.; Chusov, A.; Molodtsov, D. Production of Biohydrogen from Organ-Containing Waste for Use in Fuel Cells. Energies 2022, 15, 8019. [Google Scholar] [CrossRef]
- Rosli, M.I.; Lim, B.H.; Majlan, E.H.; Husaini, T.; Daud, W.R.W.; Lim, S.F. Performance Analysis of PEMFC with Single-Channel and Multi-Channels on the Impact of the Geometrical Model. Energies 2022, 15, 7960. [Google Scholar] [CrossRef]
- Beirami, H.; Shabestari, A.Z.; Zerafat, M.M. Optimal PID plus fuzzy controller design for a PEM fuel cell air feed system using the self-adaptive differential evolution algorithm. Int. J. Hydrogen Energy 2015, 40, 9422–9434. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J.; Yu, L.; Shu, H.; Yu, T.; Zhang, X.; Yao, W.; Sun, L. A critical survey on proton exchange membrane fuel cell parameter estimation using meta-heuristic algorithms. J. Clean. Prod. 2020, 265, 121660. [Google Scholar] [CrossRef]
- Benyahia, N.; Denoun, H.; Badji, A.; Zaouia, M.; Rekioua, T.; Benamrouche, N.; Rekioua, D. MPPT controller for an interleaved boost dc–dc converter used in fuel cell electric vehicles. Int. J. Hydrogen Energy 2014, 39, 15196–15205. [Google Scholar] [CrossRef]
- Wu, Y.; Huangfu, Y.; Ma, R.; Ravey, A.; Chrenko, D. A strong robust DC-DC converter of all-digital high-order sliding mode control for fuel cell power applications. J. Power Sources 2019, 413, 222–232. [Google Scholar] [CrossRef]
- Samal, S.; Ramana, M.; Barik, P.K. Modeling and simulation of interleaved boost converter with MPPT for fuel cell application. In Proceedings of the 2018 Technologies for Smart-City Energy Security and Power (ICSESP), Bhubaneswar, India, 28–30 March 2018; pp. 1–5. [Google Scholar]
- Naseri, N.; Hani, S.E.; Aghmadi, A.; Harouri, K.E.; Heyine, M.S.; Mediouni, H. Proton Exchange Membrane Fuel Cell Modelling and Power Control by P&O Algorithm. In Proceedings of the 2018 6th International Renewable and Sustainable Energy Conference (IRSEC), Rabat, Morocco, 5–8 December 2018; pp. 1–5. [Google Scholar]
- Karthikeyan, V.; Das, P.V.; Blaabjerg, F. Implementation of MPPT Control in Fuel Cell Fed High Step up Ratio DC–DC Converter. In Proceedings of the 2018 2nd IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 22–24 October 2018; pp. 689–693. [Google Scholar]
- Mohamed, A.P.; Chandrakala, K.R.M.V.; Saravanan, S. Comparative study of maximum power point tracking techniques for fuel cell powered electric vehicle. IOP Conf. Ser. Mater. Sci. Eng. 2019, 577, 012031. [Google Scholar] [CrossRef]
- Rezk, H.; Fathy, A. Performance Improvement of PEM Fuel Cell Using Variable Step-Size Incremental Resistance MPPT Technique. Sustainability 2020, 12, 5601. [Google Scholar] [CrossRef]
- Harrag, A.; Messalti, S. Variable Step Size IC MPPT Controller for PEMFC Power System Improving Static and Dynamic Performances. Fuel Cells 2017, 17, 816–824. [Google Scholar] [CrossRef]
- Chen, P.Y.; Yu, K.N.; Yau, H.T.; Li, J.T.; Liao, C.K. A novel variable step size fractional order incremental conductance algorithm to maximize power tracking of fuel cells. Appl. Math. Model. 2017, 45, 1067–1075. [Google Scholar] [CrossRef]
- Jyotheeswara Reddy, K.; Sudhakar, N. High Voltage Gain Interleaved Boost Converter With Neural Network Based MPPT Controller for Fuel Cell Based Electric Vehicle Applications. IEEE Access 2018, 6, 3899–3908. [Google Scholar] [CrossRef]
- Padmanaban, S.; Priyadarshi, N.; Bhaskar, M.S.; Holm-Nielsen, J.B.; Hossain, E.; Azam, F. A Hybrid Photovoltaic-Fuel Cell for Grid Integration With Jaya-Based Maximum Power Point Tracking: Experimental Performance Evaluation. IEEE Access 2019, 7, 82978–82990. [Google Scholar] [CrossRef]
- Ahmadi, S.; Abdi, S.; Kakavand, M. Maximum power point tracking of a proton exchange membrane fuel cell system using PSO-PID controller. Int. J. Hydrogen Energy 2017, 42, 20430–20443. [Google Scholar] [CrossRef]
- Fathy, A.; Abdelkareem, M.A.; Olabi, A.; Rezk, H. A novel strategy based on salp swarm algorithm for extracting the maximum power of proton exchange membrane fuel cell. Int. J. Hydrogen Energy 2020, 46, 6087–6099. [Google Scholar] [CrossRef]
- Rana, K.; Kumar, V.; Sehgal, N.; George, S. A Novel dPdI feedback based control scheme using GWO tuned PID controller for efficient MPPT of PEM fuel cell. ISA Trans. 2019, 93, 312–324. [Google Scholar] [CrossRef]
- Shashikant; Shaw, B. Comparison of SCA-Optimized PID and P&O-Based MPPT for an Off-grid Fuel Cell System. In Soft Computing in Data Analytics; Springer: Singapore, 2018; pp. 51–58. [Google Scholar]
- Kumar, S.; Shaw, B. Design of Off-grid Fuel Cell by Implementing ALO Optimized PID-Based MPPT Controller. In Soft Computing in Data Analytics; Springer: Singapore, 2018; pp. 83–93. [Google Scholar]
- Sahin, M.; Okumus, H. Fuzzy logic controlled parallel connected synchronous buck DC-DC converter for water electrolysis. IETE J. Res. 2013, 59, 280. [Google Scholar] [CrossRef]
- Aly, M.; Rezk, H. A MPPT based on optimized FLC using manta ray foraging optimization algorithm for thermo-electric generation systems. Int. J. Energy Res. 2021, 45, 13897–13910. [Google Scholar] [CrossRef]
- Rezk, H.; Aly, M.; Al-Dhaifallah, M.; Shoyama, M. Design and Hardware Implementation of New Adaptive Fuzzy Logic-Based MPPT Control Method for Photovoltaic Applications. IEEE Access 2019, 7, 106427–106438. [Google Scholar] [CrossRef]
- Harrag, A.; Messalti, S. How fuzzy logic can improve PEM fuel cell MPPT performances? Int. J. Hydrogen Energy 2018, 43, 537–550. [Google Scholar] [CrossRef]
- Aly, M.; Rezk, H. An improved fuzzy logic control-based MPPT method to enhance the performance of PEM fuel cell system. Neural Comput. Appl. 2021, 34, 4555–4566. [Google Scholar] [CrossRef]
- Cakmak, R.; Altas, I.H.; Sharaf, A.M. Modeling of FLC-Incremental based MPPT using DC–DC boost converter for standalone PV system. In Proceedings of the 2012 International Symposium on Innovations in Intelligent Systems and Applications, Trabzon, Turkey, 2–4 July 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Şahin, M.E.; Okumuş, H.İ. Comparison of Different Controllers and Stability Analysis for Photovoltaic Powered Buck-Boost DC-DC Converter. Electr. Power Components Syst. 2018, 46, 149–161. [Google Scholar] [CrossRef]
- Al-Gizi, A.G.; Al-Chlaihawi, S.J. Study of FLC based MPPT in comparison with P&O and InC for PV systems. In Proceedings of the 2016 International Symposium on Fundamentals of Electrical Engineering (ISFEE), Bucharest, Romania, 30 June–2 July 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Harrabi, N.; Souissi, M.; Aitouche, A.; Chaabane, M. Modeling and control of photovoltaic and fuel cell based alternative power systems. Int. J. Hydrogen Energy 2018, 43, 11442–11451. [Google Scholar] [CrossRef]
- Luta, D.N.; Raji, A.K. Comparing fuzzy rule-based MPPT techniques for fuel cell stack applications. Energy Procedia 2019, 156, 177–182. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Sharma, A.K.; Azam, F. A Hybrid Firefly-Asymmetrical Fuzzy Logic Controller based MPPT for PV-Wind-Fuel Grid Integration. Int. J. Renew. Energy Res. 2017, 7, 1546–1560. [Google Scholar]
- Luta, D.; Raji, A. Fuzzy Rule-Based and Particle Swarm Optimisation MPPT Techniques for a Fuel Cell Stack. Energies 2019, 12, 936. [Google Scholar] [CrossRef] [Green Version]
- Raj, A.; Lekhaj, P. An ANFIS Based MPPT Controller for Fuel Cell Powered Induction Motor Drive. In Proceedings of the 2018 International Conference on Smart Grid and Clean Energy Technologies (ICSGCE), Kajang, Malaysia, 29 May–1 June 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Reddy, K.J.; Sudhakar, N. ANFIS-MPPT control algorithm for a PEMFC system used in electric vehicle applications. Int. J. Hydrogen Energy 2019, 44, 15355–15369. [Google Scholar] [CrossRef]
- Harrag, A.; Bahri, H. Novel neural network IC-based variable step size fuel cell MPPT controller. Int. J. Hydrogen Energy 2017, 42, 3549–3563. [Google Scholar] [CrossRef]
- Guenounou, O.; Dahhou, B.; Chabour, F. Adaptive fuzzy controller based MPPT for photovoltaic systems. Energy Convers. Manag. 2014, 78, 843–850. [Google Scholar] [CrossRef]
- Hong, Y.Y.; Buay, P.M.P. Robust design of type-2 fuzzy logic-based maximum power point tracking for photovoltaics. Sustain. Energy Technol. Assess. 2020, 38, 100669. [Google Scholar] [CrossRef]
- Dehghani, M.; Taghipour, M.; Gharehpetian, G.B.; Abedi, M. Optimized Fuzzy Controller for MPPT of Grid-Connected PV Systems in Rapidly Changing Atmospheric Conditions. J. Mod. Power Syst. Clean Energy 2020, 9, 376–383. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Tanabe, R.; Fukunaga, A. Success-History Based Parameter Adaptation for Differential Evolution; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar] [CrossRef] [Green Version]
- Awad, N.H.; Ali, M.Z.; Suganthan, P.N.; Reynolds, R.G. An Ensemble Sinusoidal Parameter Adaptation Incorporated with L-SHADE for Solving CEC2014 Benchmark Problems; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Fathy, A.; Aleem, S.H.E.A.; Rezk, H. A novel approach for PEM fuel cell parameter estimation using LSHADE-EpSin optimization algorithm. Energy Res. 2020, 45, 6922–6942. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | ||||||||
|---|---|---|---|---|---|---|---|---|
| MFs | ||||||||
| E | ||||||||
| Parameter | Value |
|---|---|
| T | 343 (K) |
| l | 0.0178 (cm) |
| A | 232 (cm) |
| n | 2 |
| 35 | |
| 2.00 (A cm) | |
| (J (mol K)) | |
| F | 96,484,600 (C (kmol) |
| R | 8.31447 (J (mol K)) |
| (kmol (S)) | |
| (kmol ( S)) | |
| (kmol (atom S)) | |
| (kmol (atom S)) | |
| 0.944 | |
| 0.00354 | |
| Control Methods for MPPT in Literature | |||||
|---|---|---|---|---|---|
| Criteria | P&O | INC | PID | FLC | Proposed |
| Ref. | Ref. [19] | Refs. [21,23] | Ref. [29] | Refs. [35,43] | Proposed |
| Step type | Fixed | Variable | Variable | Variable | Variable |
| Flexibility | Very Small | Very Small | Medium | High | Very High |
| Optimization | No | No | GWO | PSO | LSHADE |
| Oscillations | High | High | Medium | Medium | Very small |
| Time of MPPT | High | Very High | High | Medium | Small |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aly, M.; Mohamed, E.A.; Rezk, H.; Nassef, A.M.; Elhosseini, M.A.; Shawky, A. An Improved Optimally Designed Fuzzy Logic-Based MPPT Method for Maximizing Energy Extraction of PEMFC in Green Buildings. Energies 2023, 16, 1197. https://doi.org/10.3390/en16031197
Aly M, Mohamed EA, Rezk H, Nassef AM, Elhosseini MA, Shawky A. An Improved Optimally Designed Fuzzy Logic-Based MPPT Method for Maximizing Energy Extraction of PEMFC in Green Buildings. Energies. 2023; 16(3):1197. https://doi.org/10.3390/en16031197
Chicago/Turabian StyleAly, Mokhtar, Emad A. Mohamed, Hegazy Rezk, Ahmed M. Nassef, Mostafa A. Elhosseini, and Ahmed Shawky. 2023. "An Improved Optimally Designed Fuzzy Logic-Based MPPT Method for Maximizing Energy Extraction of PEMFC in Green Buildings" Energies 16, no. 3: 1197. https://doi.org/10.3390/en16031197