
Variable Frequency Resonant Controller Based on Generalized Predictive Control for Biased-Sinusoidal Reference Tracking and Multi-Layer Perceptron

 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
2. Background and Literature Review
2.1. Generalized Predictive Control for the Tracking of Biased-Sinusoidal References
2.2. Internal Model Principle and Variable Frequency Resonant Controller
3. Methodology for the Design of the Proposed Variable Frequency Resonant Predictive Controller
- The GPC parameters are constants in most GPC-based applications.
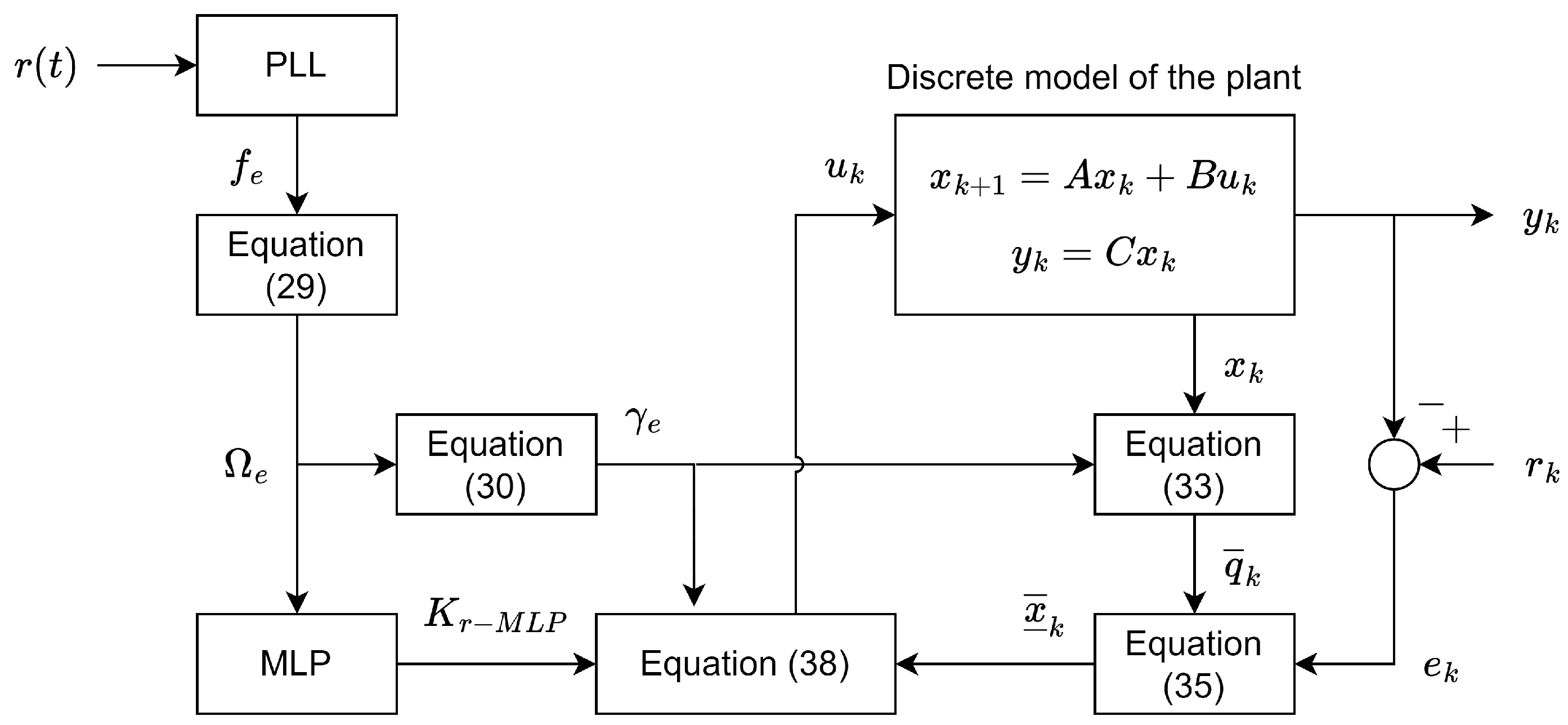
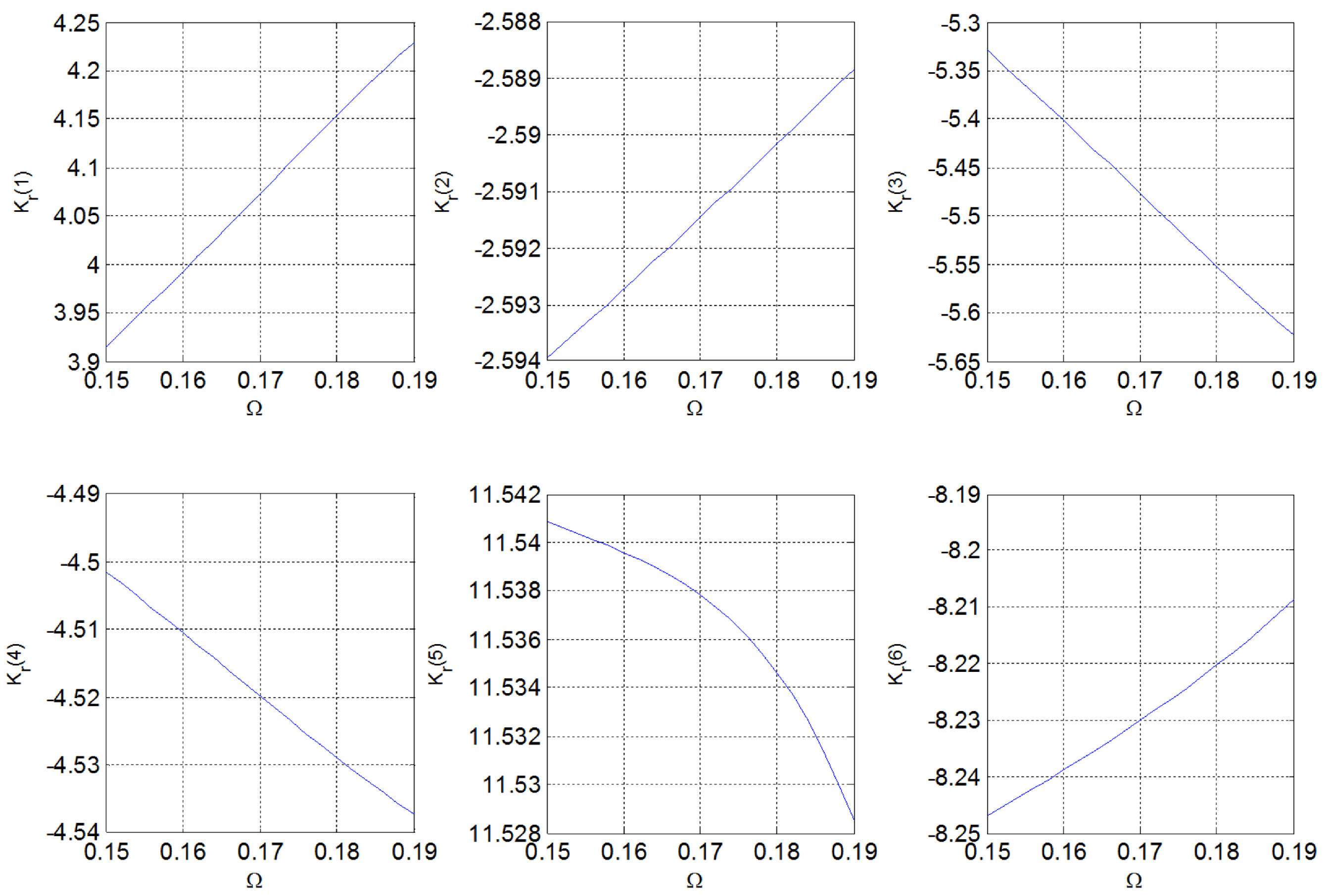
- Even if it was necessary to modify the GPC parameters to obtain the matrix gain that gives a good transient response for different frequencies, these new GPC parameters would also depend on (i.e., these parameters are a function of ). Hence, the gain matrix is a function of :where and represent mathematical functions.
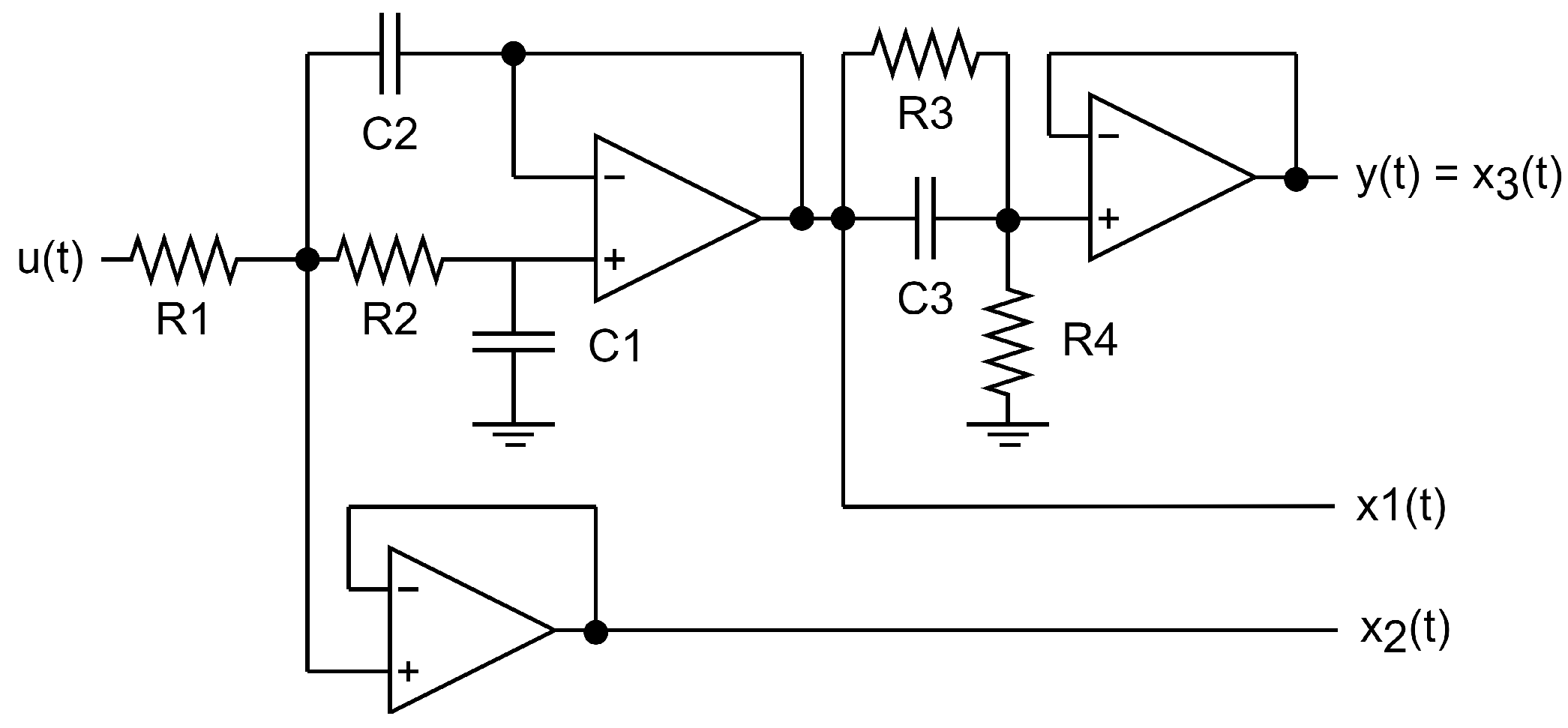
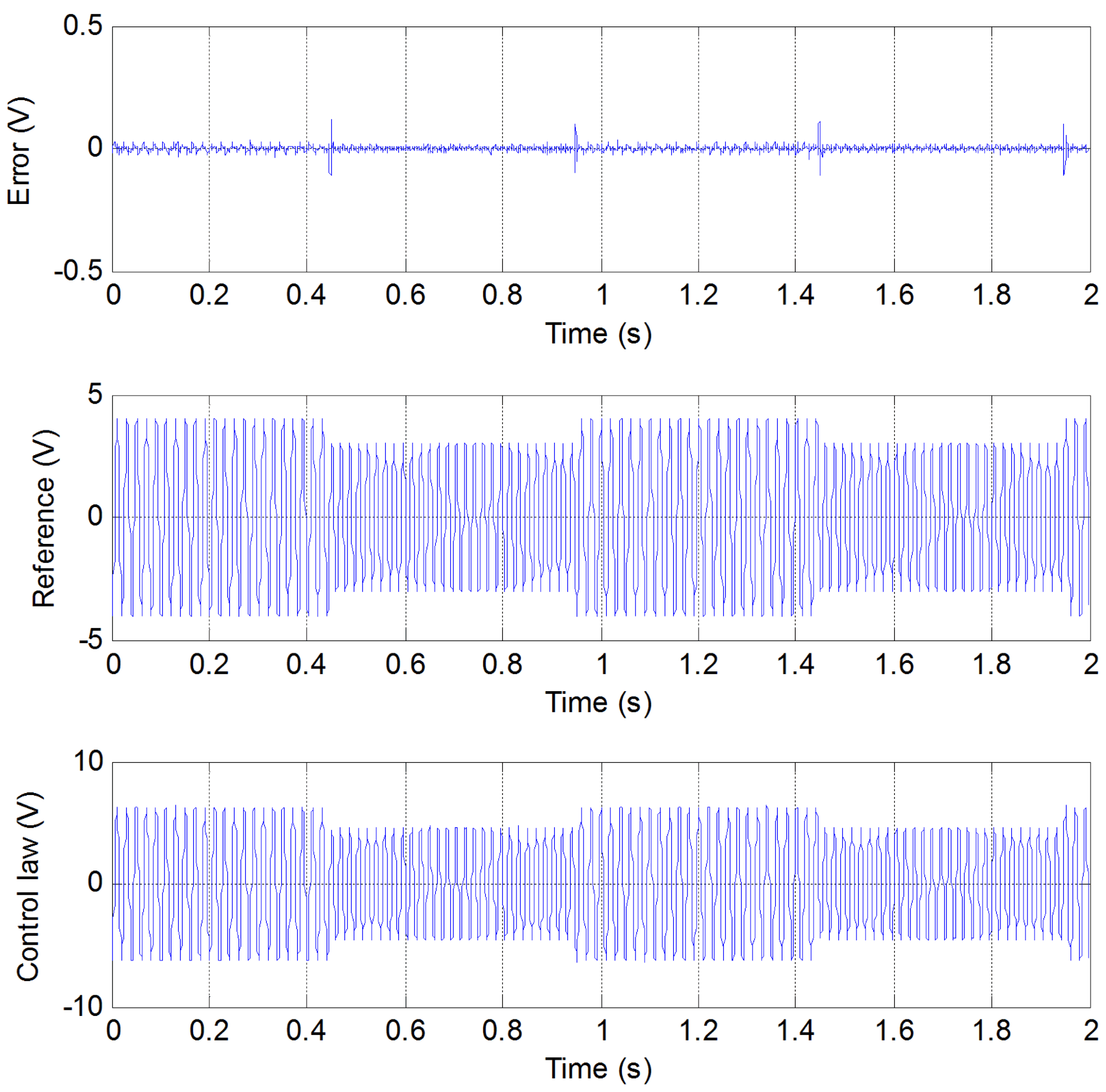
- Plant: a third-order plant with a zero was used in the experimental test. This plant was created using capacitors, resistors and the operational amplifier AD713JN. Figure 2 shows the schematic diagram of the plant. The signals , and are the state variables of the plant, which are sent to the analog-to-digital converters of the digital processor where the control algorithm is implemented (in this work, the processor is a dSpace DS1104). The transfer function of the plant is as follows:Most adaptive resonant or quasi-resonant converters are applied in power electronics devices [42,43,44,45,46]. In those cases, it is difficult to know if the control strategy produces a ripple in the tracking error or for other reasons (current or voltage harmonics, electromagnetic interference, etc.). Using a plant based on an operational amplifier makes the analysis of the error produced by the control system easier. The mean square error (MSE) and the output settling time will be used to measure the controller’s performance.
- MLP: The MLP has a hidden layer with a tan-sig activation function and an output layer with a linear activation function. The number of neurons in the output layer is (the size of ). The small number of hidden neurons should be used to obtain an adequate estimation of with low computational cost. In this work, two hidden neurons was enough to obtain a mean square error less than (negligible).
- PLL: a conventional PID-based PLL was used to estimate the frequency of the sinusoidal reference. The proportional, integral and derivative gains of the PID are 580, 3800 and 1, respectively. The frequency estimation is beyond the objectives of this work.
4. Results
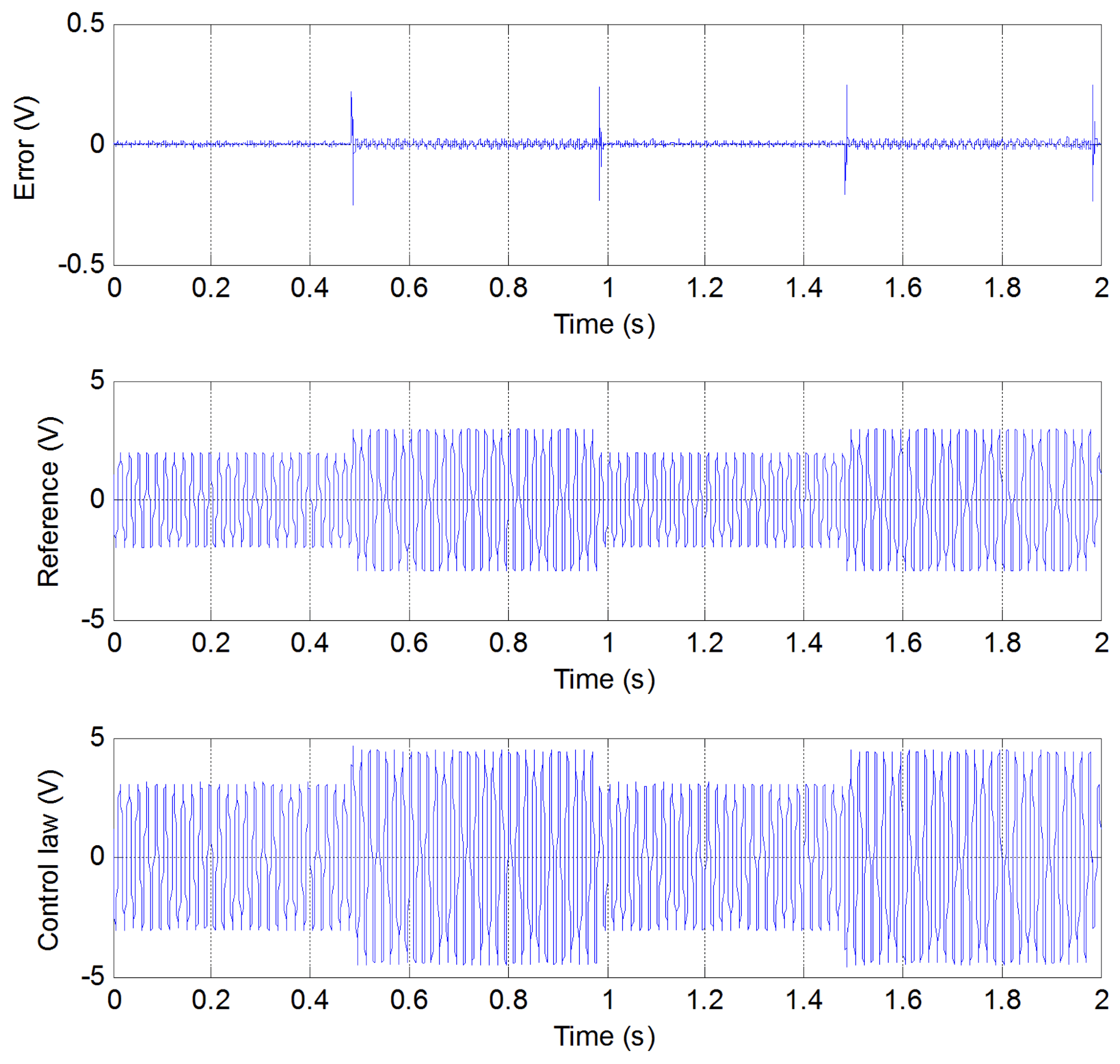
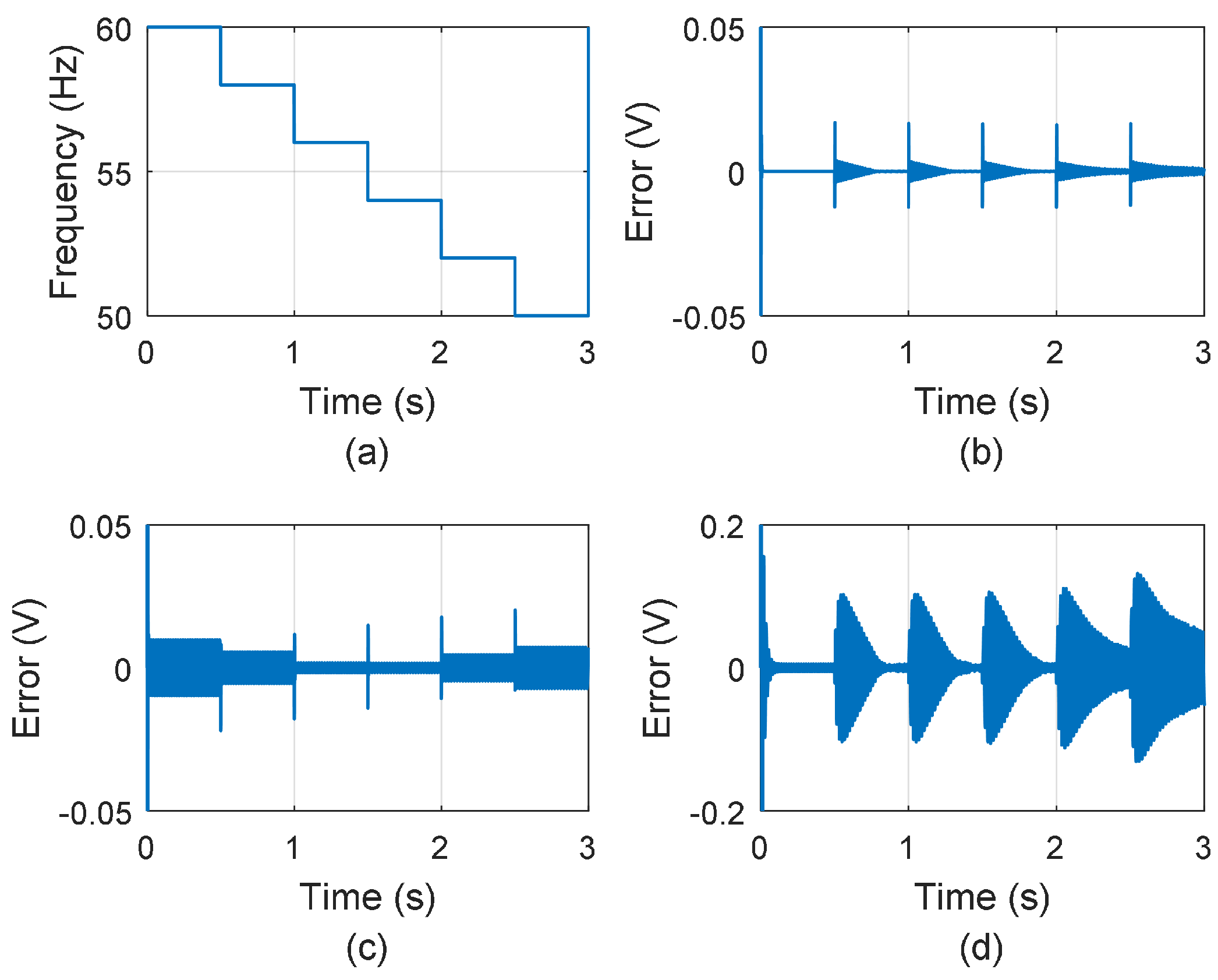
- Test 1: The reference is sinusoidal with 3 V amplitude and 60 Hz frequency. After 0.5 s, it has an amplitude of 2 V and a frequency of 50 Hz.
- Test 2: The reference is a sinusoidal reference with 4 V amplitude and 50 Hz frequency. After 0.5 s, the reference has an amplitude of 3 V and a frequency of 55 Hz.
- The resonant controller in [33], working considering a fixed frequency of 55 Hz. The GPC parameters (, , ) for this controller are equal to the parameters used in the proposed approach.
- The adaptive proportional quasi-resonant controller with the transfer function , with being the angular frequency (in rad/s) estimated by the PLL. This controller is based on [43].
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GPC | Generalized Predictive Control |
| IMP | Internal Model Principle |
| MPC | Model Predictive Control |
| PLL | Phase-Locked Loop |
| A | State matrix of the discrete-time space-state model of the plant |
| State matrix of the augmented model | |
| B | Input matrix of the discrete-time space-state model of the plant |
| Input matrix of the augmented model | |
| C | Output matrix of the discrete-time space-state model of the plant |
| Output matrix of the augmented model | |
| Tracking error at instant k | |
| f | Sinusoidal frequency in Hz |
| Estimated sinusoidal frequency by the PLL (in Hz) | |
| Transfer function of the plant | |
| Transfer function of the augmented model | |
| J | Cost function |
| k | Discrete instant of time |
| GPC gain matrix | |
| GPC gain matrix estimated by the MLP | |
| Bias of the sinusoidal reference | |
| Amplitude of the sinusoidal reference | |
| Size of the control window | |
| Size of the prediction window | |
| Linear combination of , , and | |
| Estimation of | |
| Discrete plant reference | |
| Continuous time reference | |
| Tuning parameter of the GPC cost function (J) | |
| t | Continuous time |
| Sampling time | |
| Input of the discrete-time space-state model of the plant at instant k | |
| Input of the augmented model at instant k | |
| Estimation of | |
| State vector of the plant model | |
| State vector of the augmented model | |
| Estimation of | |
| Output of the discrete-time space-state model of the plant at instant k | |
| Output of the augmented model at instant k | |
| Term that depends on . | |
| Estimation of | |
| Vector-valued function whose inputs are , , and | |
| Vector-valued function whose input is | |
| Angular frequency (rad/s) | |
| Discrete-time angular frequency (rad/sample) | |
| Estimated discrete-time angular frequency (rad/sample) | |
| Maximum value of | |
| Minimum value of |
References
- Wang, G.; Li, P.; Wang, Y. Non-Weighted Two-Stage Model Predictive Control Strategy Based on Three-Level NPC Inverter. Energies 2024, 17, 1813. [Google Scholar] [CrossRef]
- Reyes Dreke, V.D.; Lazar, M. Long-Horizon Nonlinear Model Predictive Control of Modular Multilevel Converters. Energies 2022, 15, 1376. [Google Scholar] [CrossRef]
- Chaber, P.; Wojtulewicz, A. Flexible Matrix of Controllers for Real Time Parallel Control. Energies 2022, 15, 1833. [Google Scholar] [CrossRef]
- Aboelhassan, A.; Abdelgeliel, M.; Zakzouk, E.E.; Galea, M. Design and Implementation of Model Predictive Control Based PID Controller for Industrial Applications. Energies 2020, 13, 6594. [Google Scholar] [CrossRef]
- Sun, N.; Zhang, W.; Yang, J. Integrated Path Tracking Controller of Underground Articulated Vehicle Based on Nonlinear Model Predictive Control. Appl. Sci. 2023, 13, 5340. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Choo, K.-M.; Lee, C.-H.; An, C.-G.; Yi, J.; Won, C.-Y. Common-Mode Voltage Reduction Method Based on Variable Sampling Frequency Finite Control Set-Model Predictive Control for PMSM Drive Systems. Energies 2024, 17, 1443. [Google Scholar] [CrossRef]
- Cheng, S.; Zhou, R.; Li, Z.; Xi, Z.; Zhao, J.; Zhao, K.; Xiang, C. Robust Model-Free Fault-Tolerant Predictive Control for PMSM Drive System. IEEE Access 2024, 12, 8502–8512. [Google Scholar] [CrossRef]
- Xue, C.; Wang, J.; Liu, R.; Zhang, H.; Li, Y.; Li, Y. Generalized Predictive Control for LC-Filtered Voltage-Source Inverters with Enhanced Predictive Horizon. IEEE Trans. Power Electron. 2023, 38, 13798–13810. [Google Scholar] [CrossRef]
- Prieto Cerón, C.E.; Normandia Lourenço, L.F.; Solís-Chaves, J.S.; Sguarezi Filho, A.J. A Generalized Predictive Controller for a Wind Turbine Providing Frequency Support for a Microgrid. Energies 2022, 15, 2562. [Google Scholar] [CrossRef]
- Cordero, R.; Estrabis, T.; Gentil, G.; Batista, E.; Andrea, C. Development of a Generalized Predictive Control System for Polynomial Reference Tracking. IEEE Trans. Circuits Syst. II Exp. Briefs 2021, 68, 2875–2879. [Google Scholar] [CrossRef]
- Horla, D. Experimental Results on Actuator/Sensor Failures in Adaptive GPC Position Control. Actuators 2021, 10, 43. [Google Scholar] [CrossRef]
- Qu, J.; Xia, Y.; Xue, S.; Wang, H.; Ma, Y. Novel Generalized Predictive Control for Photoelectric Tracking System Based on Improved Objective Function and Predictive Value Correction. IEEE Access 2020, 8, 18893–18901. [Google Scholar] [CrossRef]
- Kim, S.-D.; Tran, T.V.; Yoon, S.-J.; Kim, K.-H. Current Controller Design of Grid-Connected Inverter with Incomplete Observation Considering L-/LC-Type Grid Impedance. Energies 2024, 17, 1855. [Google Scholar] [CrossRef]
- Liu, X.; Deng, Y.; Wang, J.; Li, H.; Cao, H. Fixed-Time Generalized Active Disturbance Rejection with Quasi-Resonant Control for PMSM Speed Disturbances Suppression. IEEE Trans. Power Electron. 2024, 39, 6903–6918. [Google Scholar] [CrossRef]
- de Oliveira, J.H.; Cupertino, A.F.; Brito, E.M.S.; Brandao, D.I. Wear-Out Analysis of a Grid-Forming Two-Phase Three-Wire Converter Under Unbalanced Load. IEEE Trans. Power Electron. 2024, 5, 461–472. [Google Scholar] [CrossRef]
- Chatterjee, A.; Mohanty, K.B. Current Control Strategies for Single Phase Grid Integrated Inverters for Photovoltaic Applications—A Review. Renew. Sustain. Energy Rev. 2018, 92, 554–569. [Google Scholar] [CrossRef]
- Peng, C.; Sun, J.; Song, X.; Fang, J. Frequency-Varying Current Harmonics for Active Magnetic Bearing via Multiple Resonant Controllers. IEEE Trans. Ind. Electron. 2017, 64, 517–526. [Google Scholar] [CrossRef]
- Esbrook, A.; Tan, X.; Khalil, H.K. Control of Systems with Hysteresis Via Servocompensation and its Application to Nanopositioning. IEEE Trans. Control Syst. Technol. 2013, 21, 725–738. [Google Scholar] [CrossRef]
- de Lima, P.V.S.G.; Neto, R.C.; Neves, F.A.S.; Bradaschia, F.; de Souza, H.E.P.; Barbosa, E.J. Zero-Phase FIR Filter Design Algorithm for Repetitive Controllers. Energies 2023, 16, 2451. [Google Scholar] [CrossRef]
- Francis, B.A.; Wonham, W.M. The Internal Model Principle for Linear Multivariable Regulators. Appl. Math. Optim. 1975, 2, 170–194. [Google Scholar] [CrossRef]
- Pan, X.; Huang, J.; Lee, S. Networked Tracking Control Based on Internal Model Principle and Adaptive Event-Triggering Mechanism. IEEE Access 2023, 11, 23531–23543. [Google Scholar] [CrossRef]
- Peng, Y.; Sun, W.; Deng, F. Internal Model Principle Method to Robust Output Voltage Tracking Control for Single-Phase UPS Inverters with its SPWM Implementation. IEEE Trans. Energy Convers. 2021, 36, 841–852. [Google Scholar] [CrossRef]
- Bouzid, A.E.M.; Zerrougui, M.; Ben Elghali, S.; Beddiar, K.; Benbouzid, M. Robust Resonant Controllers for Distributed Energy Resources in Microgrids. Appl. Sci. 2020, 10, 8905. [Google Scholar] [CrossRef]
- Liu, D.; Li, B.; Huang, S.; Liu, L.; Wang, H.; Huang, Y. An Improved Frequency-Adaptive Virtual Variable Sampling-Based Repetitive Control for an Active Power Filter. Energies 2022, 15, 7227. [Google Scholar] [CrossRef]
- Kim, D.-H.; Kim, M.-S.; Kim, H.-J. Frequency-Tracking Algorithm Based on SOGI-FLL for Wireless Power Transfer System to Operate ZPA Region. Electronics 2020, 9, 1303. [Google Scholar] [CrossRef]
- Salem, M.; Ramachandaramurthy, V.K.; Jusoh, A.; Padmanaban, S.; Kamarol, M.; Teh, J.; Ishak, D. Three-Phase Series Resonant DC-DC Boost Converter with Double LLC Resonant Tanks and Variable Frequency Control. IEEE Access 2020, 8, 22386–22399. [Google Scholar] [CrossRef]
- Rohten, J.; Melín, P.; Espinoza, J.; Sbarbaro, D.; Silva, J.; Perez, M. Resonant Control for Power Converters Connected to Weak and Micro Grid Systems with Variant Frequency. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Dhaouadi, R.; Takrouri, M.; Hafez, I. High Precision Sinusoidal Position Tracking of a Voice-Coil Linear Servomotor Using Resonant Control. Electronics 2023, 12, 977. [Google Scholar] [CrossRef]
- Guillén, P.; Fiedler, F.; Sarnago, H.; Lucía, S.; Lucía, O. Deep Learning Implementation of Model Predictive Control for Multioutput Resonant Converters. IEEE Access 2022, 10, 65228–65237. [Google Scholar] [CrossRef]
- Santiprapan, P.; Areerak, K.; Areerak, K. An Adaptive Gain of Proportional-Resonant Controller for an Active Power Filter. IEEE Trans. Power Electron. 2024, 39, 1433–1446. [Google Scholar] [CrossRef]
- Koch, G.G.; Osório, C.R.D.; Pinheiro, H.; Oliveira, R.C.L.F.; Montagner, V.F. Design Procedure Combining Linear Matrix Inequalities and Genetic Algorithm for Robust Control of Grid-Connected Converters. IEEE Trans. Ind. Appl. 2020, 56, 1896–1906. [Google Scholar] [CrossRef]
- Lenwari, W.; Sumner, M.; Zanchetta, P. The Use of Genetic Algorithms for the Design of Resonant Compensators for Active Filters. IEEE Trans. Ind. Electron. 2009, 56, 2852–2861. [Google Scholar] [CrossRef]
- Cordero, R.; Estrabis, T.; Gentil, G.; Caramalac, M.; Suemitsu, W.; Onofre, J.; Brito, M.; dos Santos, J. Tracking and Rejection of Biased Sinusoidal Signals Using Generalized Predictive Controller. Energies 2022, 15, 5664. [Google Scholar] [CrossRef]
- Wang, L. Model Predictive Control System Design and Implementation Using Matlab®; Springer: London, UK, 2009; pp. 1–20. [Google Scholar]
- Duque, E.R.C.; Lunardi, A.; Solís-Chaves, J.S.; Paiva, T.d.S.; Fernandes, D.A.; Sguarezi Filho, A.J. Improvement of Robustness of MPC Adding Repetitive Behavior for the DFIG Current Control. Energies 2022, 15, 4114. [Google Scholar] [CrossRef]
- Li, W.; Zhang, J.; Wang, F.; Zhou, H. Model Predictive Control Based on State Space and Risk Augmentation for Unmanned Surface Vessel Trajectory Tracking. J. Mar. Sci. Eng. 2023, 11, 2283. [Google Scholar] [CrossRef]
- Song, H.; Qu, D.; Guo, H.; Zhang, K.; Wang, T. Lane-Changing Trajectory Tracking and Simulation of Autonomous Vehicles Based on Model Predictive Control. Sustainability 2022, 14, 13272. [Google Scholar] [CrossRef]
- Koo, S.M.; Travis, H.; Sands, T. Impacts of Discretization and Numerical Propagation on the Ability to Follow Challenging Square Wave Commands. J. Mar. Sci. Eng. 2022, 10, 419. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Y.; Kowalczuk, Z. Adaptive Optimal Discrete-Time Output-Feedback Using an Internal Model Principle and Adaptive Dynamic Programming. IEEE/CAA J. Autom. Sin. 2024, 11, 131–140. [Google Scholar] [CrossRef]
- Salton, A.T.; Flores, J.V.; Zheng, J.; Fu, M. Asymptotic Tracking of Discrete-Time Systems Subject to Uniform Output Quantization. IEEE Contr. Syst. Lett. 2023, 7, 829–834. [Google Scholar] [CrossRef]
- Prakosa, J.A.; Purwowibowo, P.; Kurniawan, E.; Wijonarko, S.; Maftukhah, T.; Sari, F.; Pratiwi, E.B.; Rustandi, D. Discrete-Time Design of Dual Internal Model-Based Repetitive Control Systems. Appl. Sci. 2022, 12, 11746. [Google Scholar] [CrossRef]
- Islam, S.U.; Zeb, K.; Din, W.U.; Khan, I.; Ishfaq, M.; Busarello, T.D.C.; Kim, H.J. Design of a Proportional Resonant Controller with Resonant Harmonic Compensator and Fault Ride Trough Strategies for a Grid-Connected Photovoltaic System. Electronics 2018, 7, 451. [Google Scholar] [CrossRef]
- Li, X.; Lin, H. Stability Analysis of Grid-Connected Converters with Different Implementations of Adaptive PR Controllers under Weak Grid Conditions. Energies 2018, 11, 2004. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, K.; Blaabjerg, F. Enhancing the Frequency Adaptability of Periodic Current Controllers With a Fixed Sampling Rate for Grid-Connected Power Converters. IEEE Trans. Power Electron. 2016, 31, 7273–7285. [Google Scholar] [CrossRef]
- Gómez Jorge, S.; Busada, C.A.; Solsona, J.A. Frequency-Adaptive Current Controller for Three-Phase Grid-Connected Converters. IEEE Trans. Ind. Electron. 2013, 60, 4169–4177. [Google Scholar] [CrossRef]
- Gonzalez-Espin, F.; Garcera, G.; Patrao, I.; Figueres, E. An Adaptive Control System for Three-Phase Photovoltaic Inverters Working in a Polluted and Variable Frequency Electric Grid. IEEE Trans. Power Electron. 2012, 27, 4248–4261. [Google Scholar] [CrossRef]
- Meng, J.; Xiao, H.; Jiang, L.; Hu, Z.; Jiang, L.; Jiang, N. Adaptive Model Predictive Control for Mobile Robots with Localization Fluctuation Estimation. Sensors 2023, 23, 2501. [Google Scholar] [CrossRef]
- Rehman, Z.U.; Khan, M.A.A.; Ma, H.; Rahman, M. Adaptive Model Predictive Control Scheme Based on Non-Minimal State Space Representation. Symmetry 2023, 15, 1508. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Number | Mean Square Error (MSE) | Settling Time (s) |
|---|---|---|
| Test 1 | ||
| Test 2 |
| Test | Mean Square Error (MSE) |
|---|---|
| The proposed approach | |
| The resonant controller operating with fixed frequency | |
| The proportional quasi-resonant controller |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cordero, R.; Gonzales, J.; Estrabis, T.; Galotto, L.; Padilla, R.; Onofre, J. Variable Frequency Resonant Controller Based on Generalized Predictive Control for Biased-Sinusoidal Reference Tracking and Multi-Layer Perceptron. Energies 2024, 17, 2801. https://doi.org/10.3390/en17122801
Cordero R, Gonzales J, Estrabis T, Galotto L, Padilla R, Onofre J. Variable Frequency Resonant Controller Based on Generalized Predictive Control for Biased-Sinusoidal Reference Tracking and Multi-Layer Perceptron. Energies. 2024; 17(12):2801. https://doi.org/10.3390/en17122801
Chicago/Turabian StyleCordero, Raymundo, Juliana Gonzales, Thyago Estrabis, Luigi Galotto, Rebeca Padilla, and João Onofre. 2024. "Variable Frequency Resonant Controller Based on Generalized Predictive Control for Biased-Sinusoidal Reference Tracking and Multi-Layer Perceptron" Energies 17, no. 12: 2801. https://doi.org/10.3390/en17122801
APA StyleCordero, R., Gonzales, J., Estrabis, T., Galotto, L., Padilla, R., & Onofre, J. (2024). Variable Frequency Resonant Controller Based on Generalized Predictive Control for Biased-Sinusoidal Reference Tracking and Multi-Layer Perceptron. Energies, 17(12), 2801. https://doi.org/10.3390/en17122801