
Optimal Electric Motor Designs of Light Electric Vehicles: A Review

Abstract
:1. Introduction
- -
- e-bikes with pedal assistance, e-scooters, electric kick scooters, self-balancing scooters, Segways, mopeds, electric three-wheelers, e-skateboards, and electric unicycles—called Personal Light Electric Vehicles;
- -
- e-cargo bikes for goods transport (e-rickshaws);
- -
- Mobility scooters, microcars, golf cars, BSO-buses (electric child carrier).
- -
- e-bike vehicles with pedal assistance have a maximum construction speed of 25 km/h, the maximum mass in running order (mass of the vehicle including batteries without load) should be less than 55 kg, the maximum total mass in running order is approximately 200 kg, and the maximum width of the vehicle is 0.75 m;
- -
- e-cargo bike vehicles for goods transport have a maximum construction speed of 25 km/h, the maximum mass in running order (mass of the vehicle including batteries without load) should be less than 55 kg, the maximum total mass in running order is approximately 140 kg, and the maximum width of the vehicle is 0.75 m;
- -
- Mobility scooter vehicles have a maximum construction speed of 25 (even up to 45 for microcars) km/h, and the maximum mass in running order (mass of the vehicle including batteries without load) is greater than 55 kg but does not exceed 350 kg, maximum total mass in running order is approximately 550 kg, and the maximum width of the vehicle is 1 m;
- -
- The above-mentioned groups of vehicles are powered by electric motors with a power output of several hundred W (Personal Light Electric Vehicles) up to 3–4 kW (microcars, BSO-buses);
- -
- No license is needed for users of a large portion of these vehicles;
- -
- Vehicles are powered by an internal battery or are additionally supported by the power of human muscles.
2. Types of Electric Motors Used in EV Drives
Key Factors and Parameters to Consider When Selecting an Electric Motor for an Electric Vehicle
- The amount of power and torque generated is directly related to the power-to-weight ratio. A higher value of this ratio will lead to increased speed and acceleration of the electric vehicle.
- Power density influences space usage by addressing the question of whether a motor can be built to fit into a particular space.
- Peak power output is the maximum power that an electric motor can generate in a short period of time.
- Motor efficiency has a direct impact on the vehicle’s operational range.
- The battery and electronic drive system are selected based on the motor’s voltage and current specifications.
- The motor’s application area is determined by its cooling technology (air-cooled or liquid-cooled), which is crucial for improved heat management and performance.
3. A Review of LEV Motor Designs, Including Topologies That Improve Operational Performance
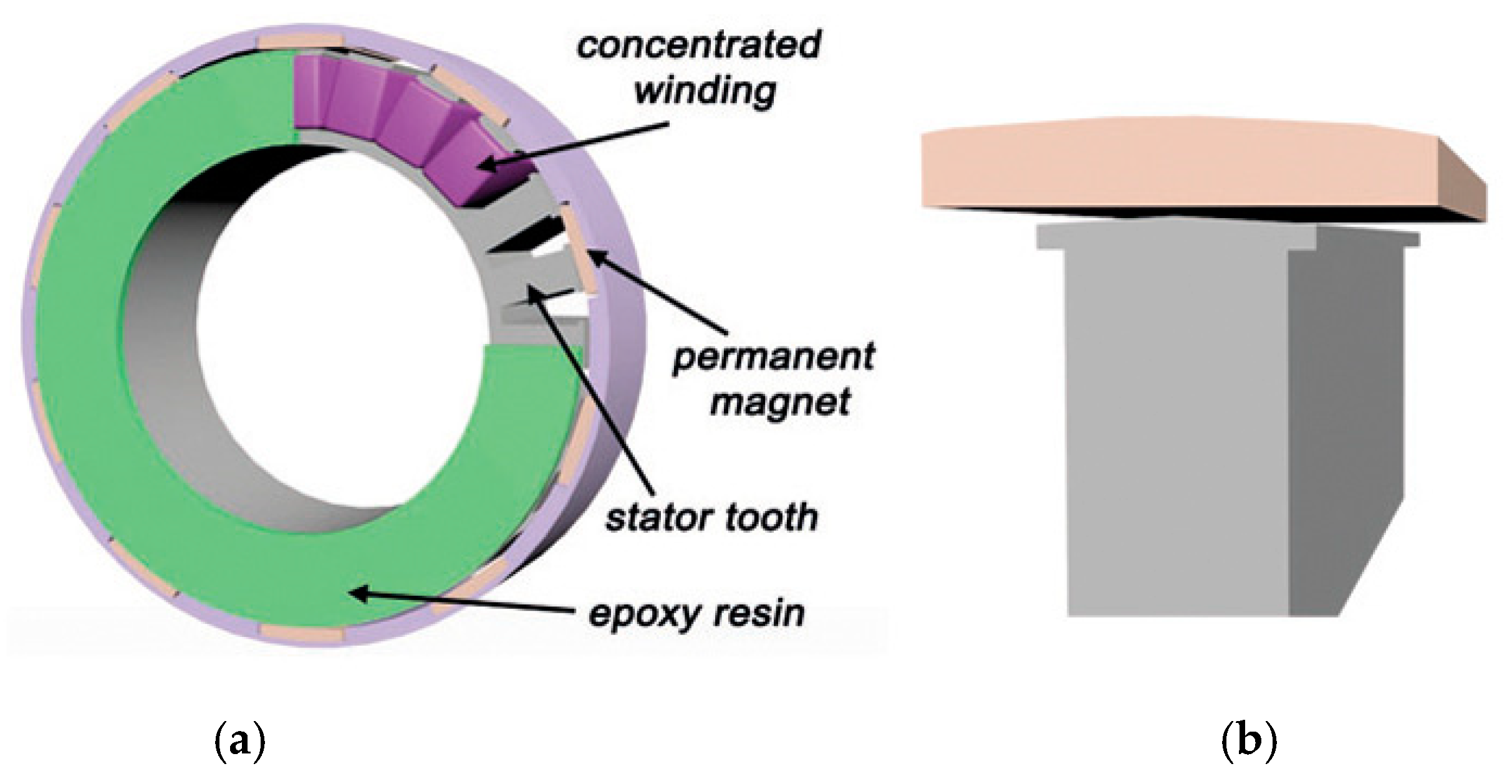
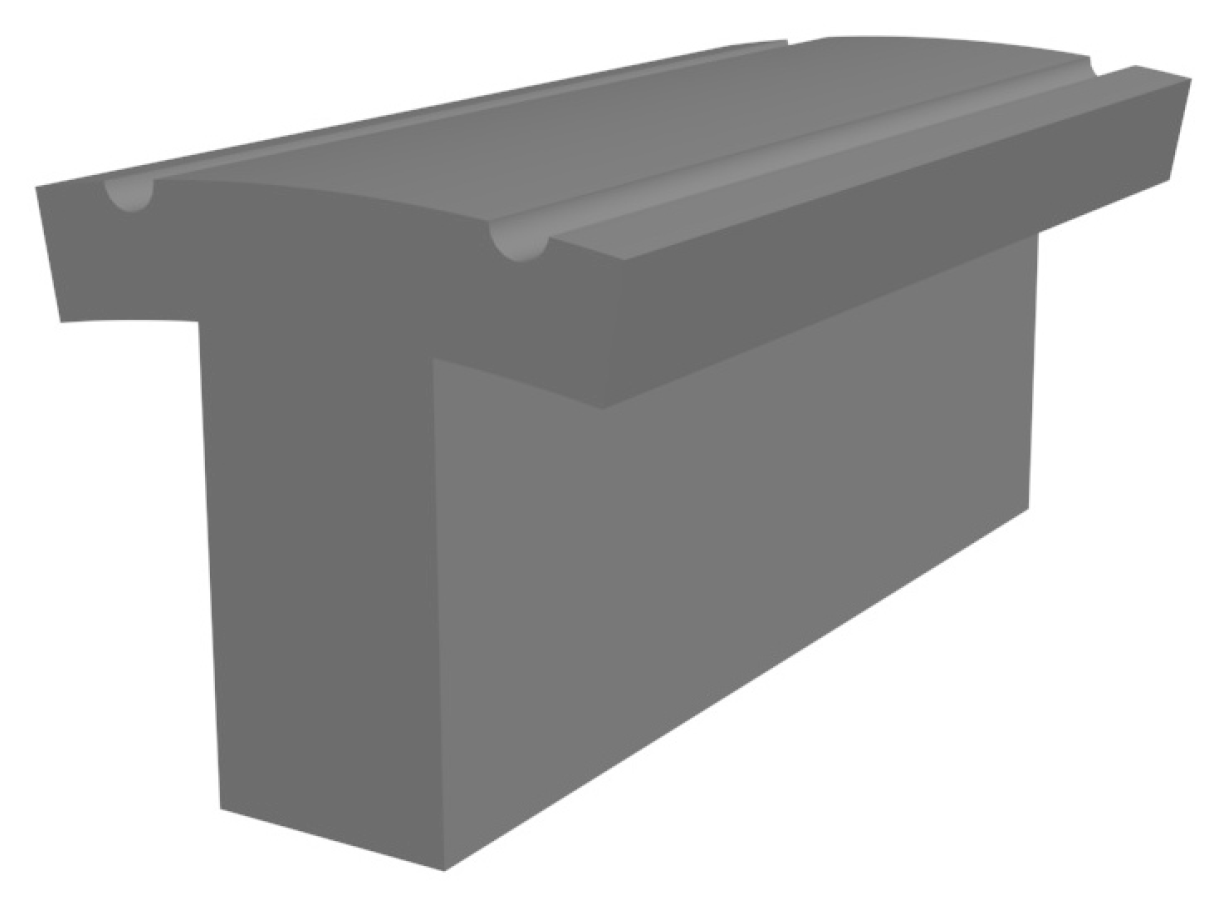
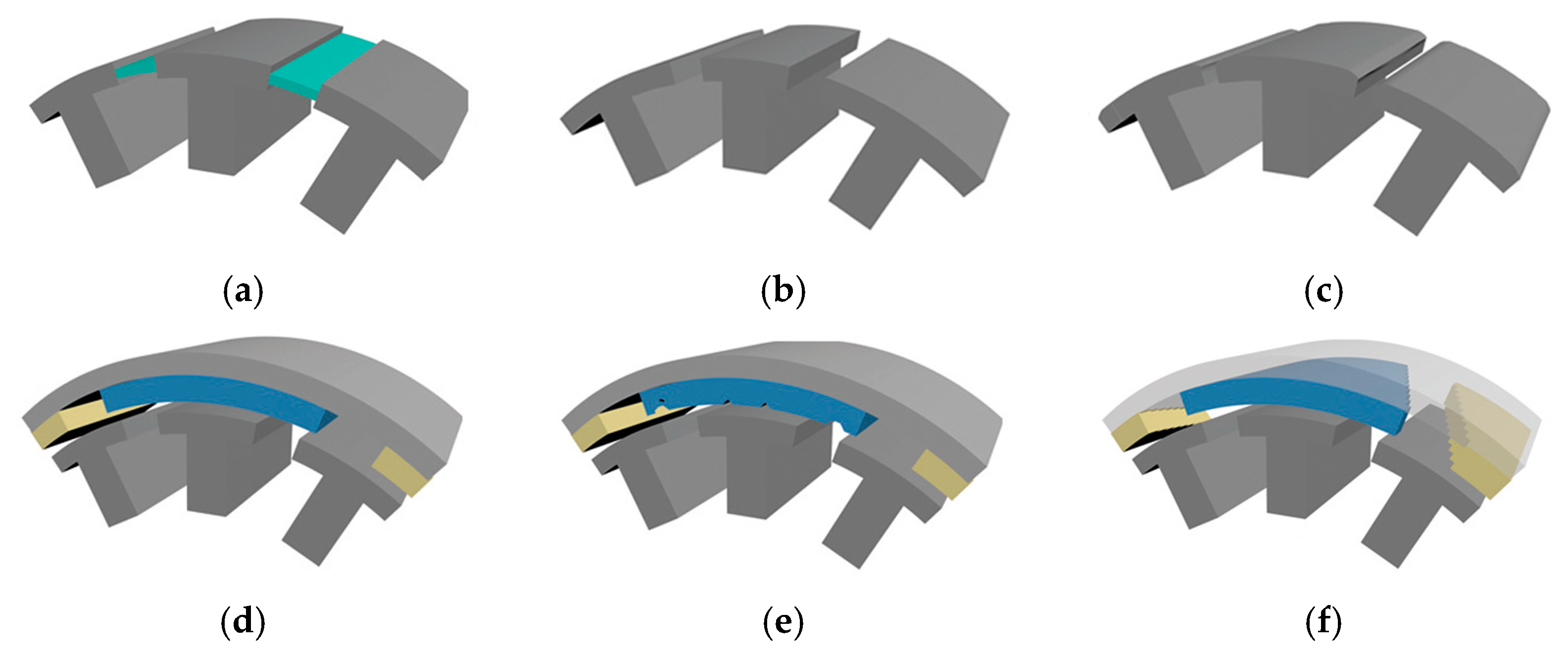
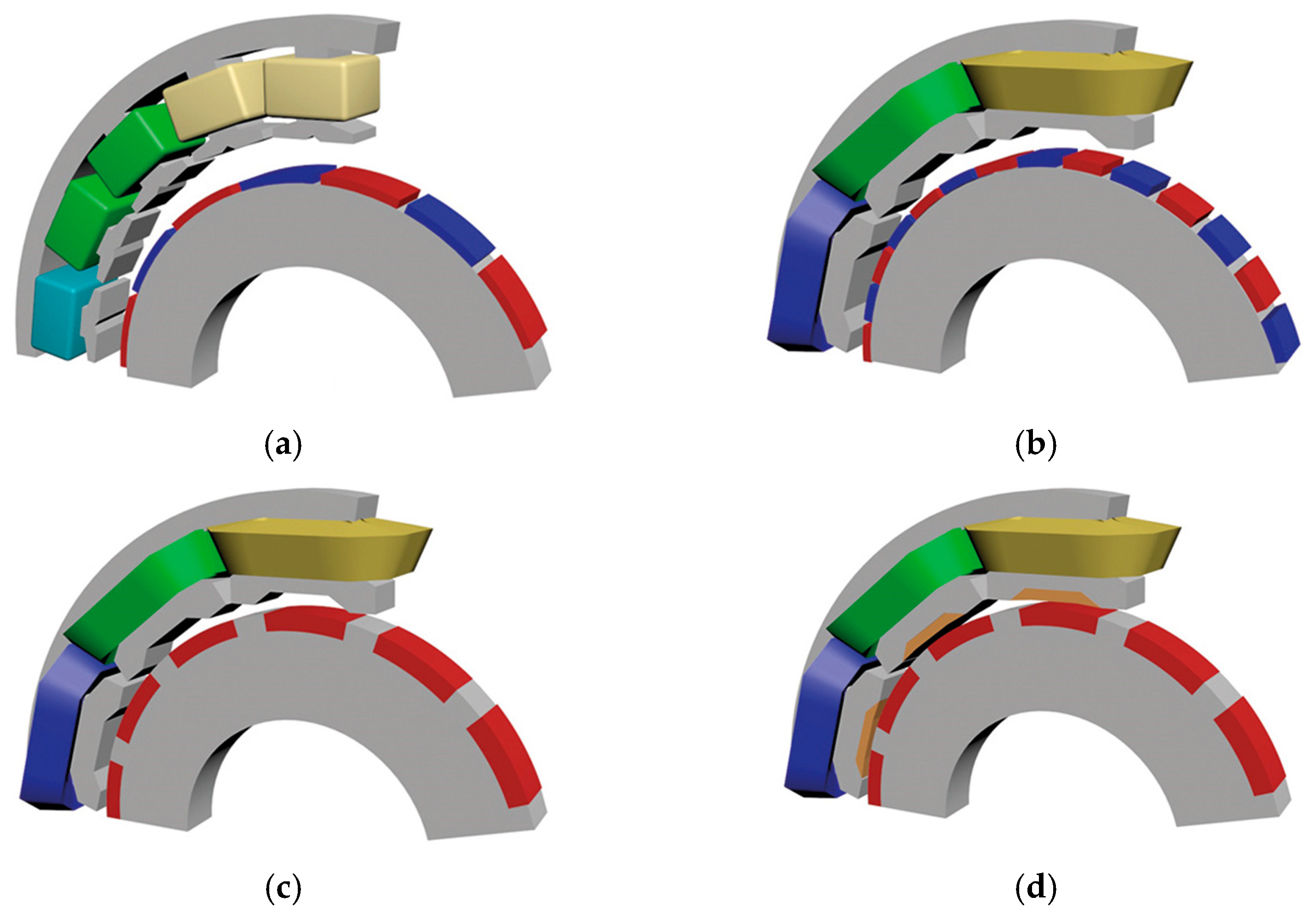
3.1. In-Wheel Motors with Surface-Mounted Permanent Magnets
- Optimized 27-slot, 12-pole-pair regular PMSM with ferrite magnets or NdFeB magnets—Figure 5a;
- Optimized split-tooth, 12-slot, 19-pole-pair, regular permanent magnet Vernier motor with NdFeB magnets—Figure 5b;
- A 12-slot, 24-tooth, 19-pole-pair, consequent-pole permanent magnet Vernier motor with ferrite magnets—Figure 5c;
- A 12-slot, 24-tooth, 19-pole-pair, consequent-pole permanent magnet Vernier motor with stator-assisted ferrite magnets—Figure 5d.
3.2. Axial-Flux Motors
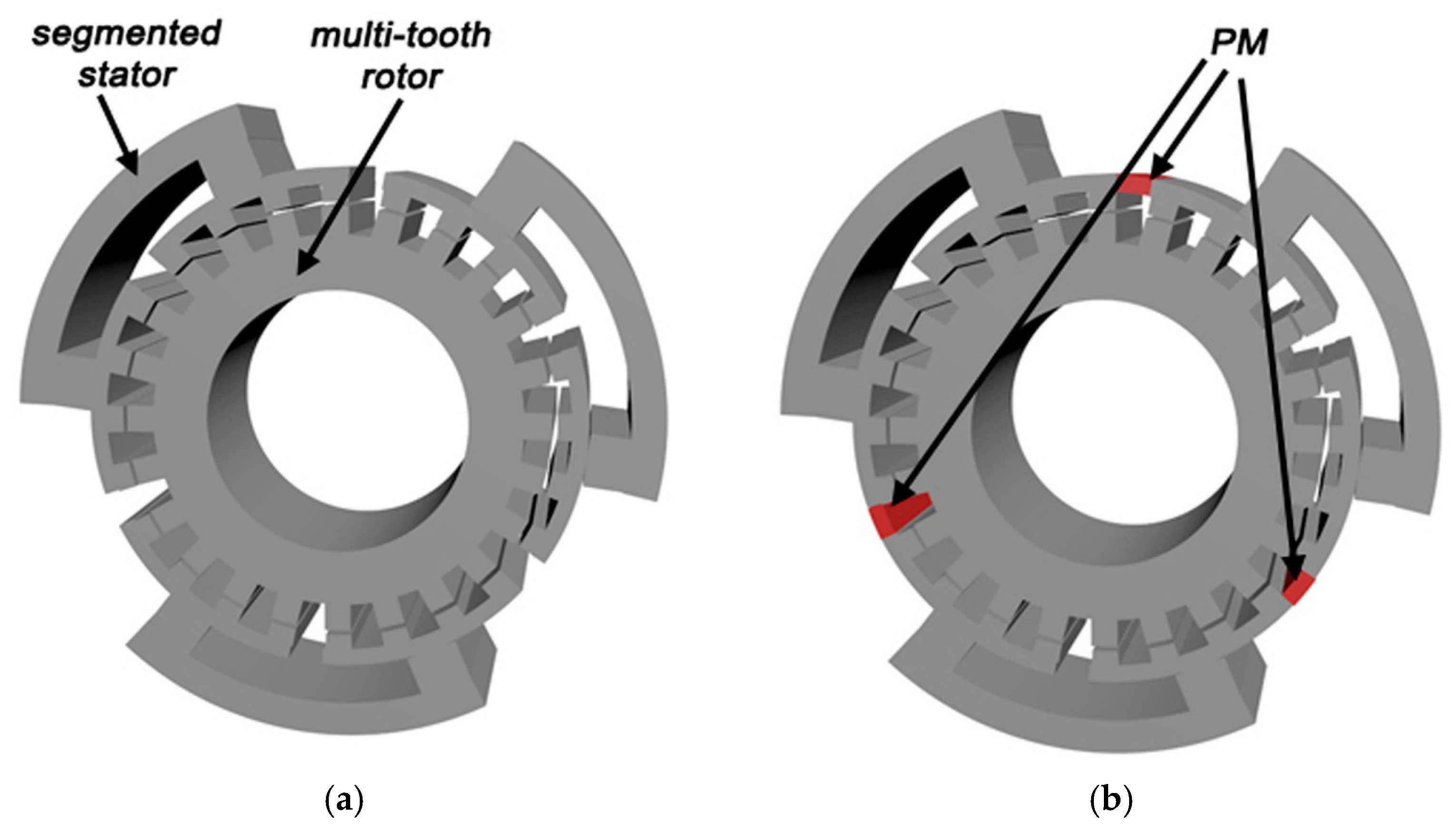
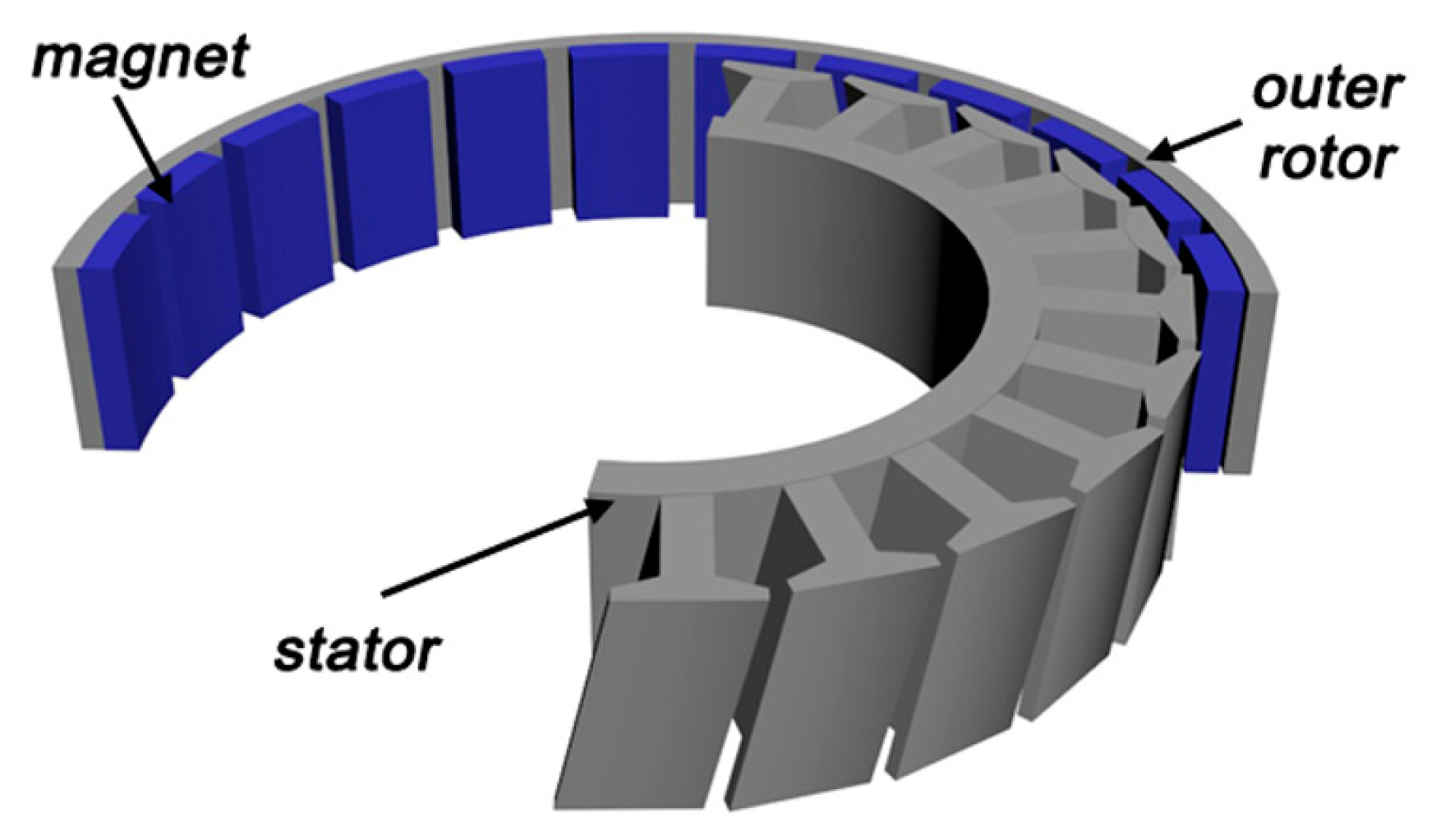
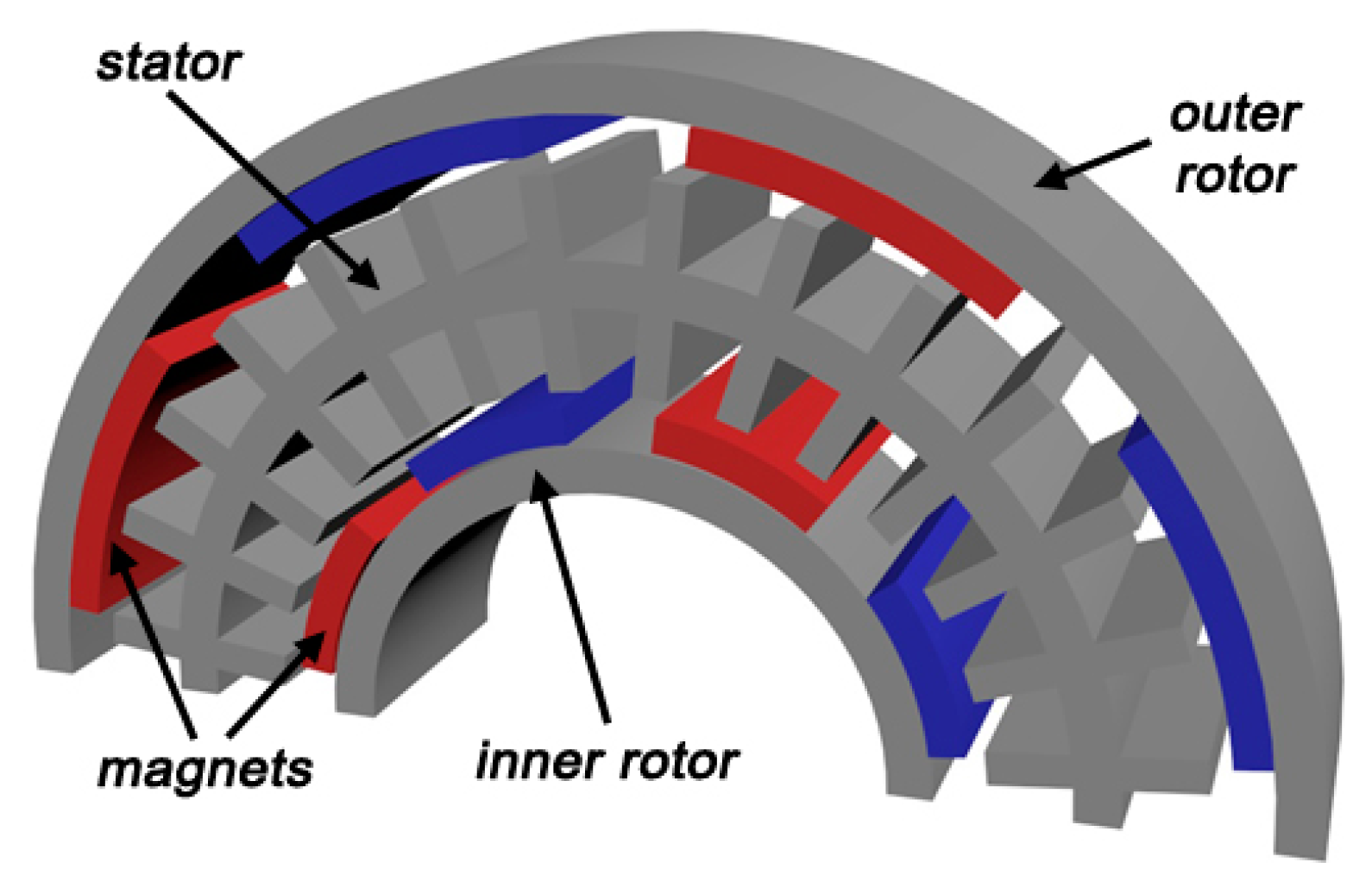
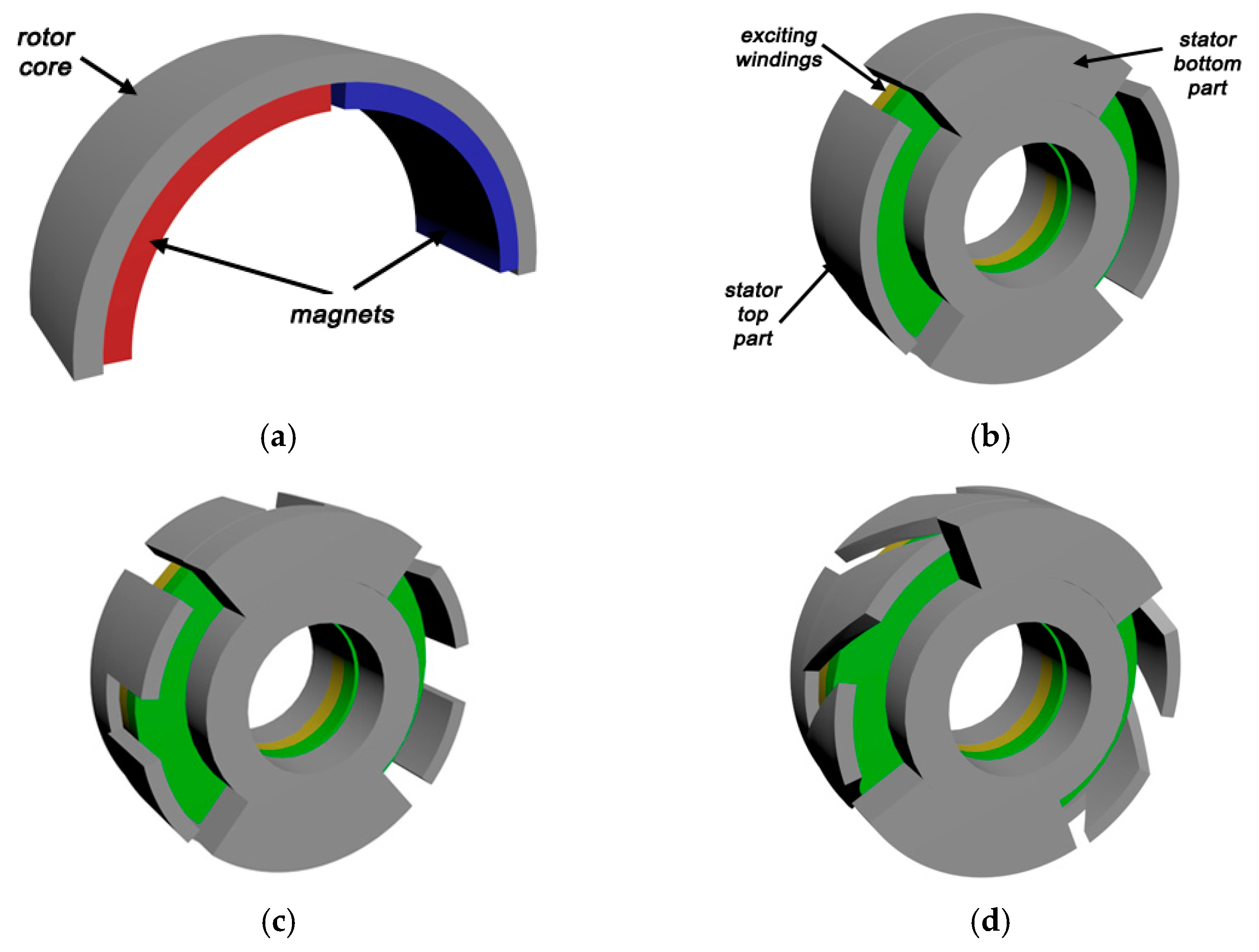
3.3. Switched Reluctance Motors
3.4. BLDC Motors
4. Discussion and Conclusions
Funding
Conflicts of Interest
References
- Electric Cars: A Revisit from History. Available online: https://chargetrip.com/blog/electric-cars-a-revisit-from-history (accessed on 1 March 2024).
- Hill, G.; Heidrich, O.; Creutzig, F.; Blythe, P. The Role of Electric Vehicles in Near-term Mitigation Pathways and Achieving the UK’s Carbon Budget. Appl. Energy 2019, 251, 113111. [Google Scholar] [CrossRef]
- Electric Vehicles. Available online: https://www2.deloitte.com/us/en/insights/focus/future-of-mobility/electric-vehicle-trends-2030.html (accessed on 1 March 2024).
- Trends in Electric Cars. Available online: https://www.iea.org/reports/global-ev-outlook-2024/trends-in-electric-cars (accessed on 1 March 2024).
- EV Motors Boost Copper Demand. Available online: https://internationalcopper.org/wp-content/uploads/2020/03/EV_Motors-Boost-Copper-Demand.pdf (accessed on 1 March 2024).
- Lungoci, C.M.; Georgescu, M.; Calin, M.D. Electrical Motor Types for Vehicle Propulsion. In Proceedings of the 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 24–26 May 2012. [Google Scholar] [CrossRef]
- Ramya, K.C.; Ramani, J.G.; Sridevi, A.; Rai, R.S.; Shirley, D.R.A. Analysis of the Different Types of Electric Motors Used in Electric Vehicles. In E-Mobility; Kathiresh, M., Kanagachidambaresan, G.R., Williamson, S.S., Eds.; Springer: Cham, Switzerland, 2022; pp. 43–57. [Google Scholar]
- El Hadraoui, H.; Zegrari, M.; Chebak, A.; Laayati, O.; Guennouni, N. A Multi-Criteria Analysis and Trends of Electric Motors for Electric Vehicles. World Electr. Veh. J. 2022, 13, 65. [Google Scholar] [CrossRef]
- Cao, Z.; Mahmoudi, A.; Kahourzade, S.; Soong, W.L. An Overview of Electric Motors for Electric Vehicles. In Proceedings of the 31st Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 26–30 September 2021. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.; Marquez-Barja, J. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Bhatt, P.; Mehar, H.; Sahajwani, M. Electrical Motors for Electric Vehicle—A Comparative Study. In Proceedings of the Recent Advances in Interdisciplinary Trends in Engineering & Applications (RAITEA), Indore, India, 14–16 February 2019. [Google Scholar] [CrossRef]
- Agamloh, E.; von Jouanne, A.; Yokochi, A. An Overview of Electric Machine Trends in Modern Electric Vehicles. Machines 2020, 8, 20. [Google Scholar] [CrossRef]
- Kahourzade, S.; Mahmoudi, A.; Soong, W.L.; Ferrari, S.; Pellegrino, G. Correction of Finite-Element Calculated Efficiency Map using Experimental Measurements. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019. [Google Scholar] [CrossRef]
- Kahourzade, S.; Mahmoudi, V.; Soong, W.; Ertugrul, N.; Pellegrino, G. Estimation of PM Machine Efficiency Maps from Limited Data. IEEE Trans. Ind. Appl. 2020, 56, 2612–2621. [Google Scholar] [CrossRef]
- Kahourzade, S.; Mahmoudi, A.; Soong, W.L.; Pellegrino, G. A Practical Method for Estimating Efficiency Maps for PM Machines Using a Reduced Number of Tests. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, 14–17 October 2019. [Google Scholar] [CrossRef]
- Maggetto, G.; Van Mierlo, J. Electric and Electric Hybrid Vehicle Technology: A Survey. In Proceedings of the IEE Seminar Electric, Hybrid and Fuel Cell Vehivles, Durham, UK, 11 April 2000. [Google Scholar] [CrossRef]
- Singh, K.V.; Bansal, H.O.; Singh, D. A Comprehensive Review on Hybrid Electric Vehicles: Architectures and Components. J. Mod. Transp. 2019, 27, 77–107. [Google Scholar] [CrossRef]
- Xue, X.D.; Cheng, K.W.E.; Cheung, N.C. Selection of Electric Motor Drives for Electric Vehicles. In Proceedings of the Australasian Universities Power Engineering Conference, Sydney, Australia, 14–17 December 2008. [Google Scholar]
- Lulhe, A.M.; Date, T.N. A Technology Review Paper for Drives Used in Electrical Vehicle (EV) & Hybrid Electrical Vehicles (HEV). In Proceedings of the 2015 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kumaracoil, India, 18–19 December 2015. [Google Scholar] [CrossRef]
- Rajashekara, K. Present Status and Future Trends in Electric Vehicle Propulsion Technologies. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 3–10. [Google Scholar] [CrossRef]
- Jose, C.P.; Meikandasivam, S. A Review on the Trends and Developments in Hybrid Electric Vehicles. In Innovative Design and Development Practices in Aerospace and Automotive Engineering; Bajpai, R.P., Chandrasekhar, U., Eds.; Springer: Singapore, 2017; pp. 211–229. [Google Scholar] [CrossRef]
- Wang, J.; Yuan, X.; Kais, A. Design Optimization of a Surface-Mounted Permanent-Magnet Motor with Concentrated Windings for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2013, 62, 1053–1064. [Google Scholar] [CrossRef]
- Credo, A.; Tursini, M.; Villani, M.; Di Lodovico, C.; Orlando, M.; Frattari, F. Axial Flux PM In-Wheel Motor for Electric Vehicles: 3D Multiphysics Analysis. Energies 2021, 14, 2107. [Google Scholar] [CrossRef]
- Gao, P.; Gu, Y.; Wang, X. The Design of a Permanent Magnet In-Wheel Motor with Dual-Stator and Dual-Field-Excitation Used in Electric Vehicles. Energies 2018, 11, 424. [Google Scholar] [CrossRef]
- Deng, Q.-L.; Xiao, F.; Huang, W.-T. Design of New-type Axial Flux Permanent Magnet in-Wheel Machine. In Proceedings of the International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010. [Google Scholar] [CrossRef]
- Pellegrino, G.; Vagati, A.; Boazzo, B.; Guglielmi, P. Comparison of Induction and PM synchronous Motor Drives for EV Application Including Design Examples. IEEE Trans. Ind. Appl. 2012, 48, 2322–2332. [Google Scholar] [CrossRef]
- Qi, H.; Ling, L.; Liwei, Z. Design and Research of Axial Flux Permanent Magnet Motor for Electric Vehicle. In Proceedings of the IEEE 3rd International Electrical and Energy Conference (CIEEC), Beijing, China, 7–9 September 2019. [Google Scholar] [CrossRef]
- Güneşer, M.T.; Dalcali, A.; Öztürk, T.; Ocak, C.; Cernat, M. An Induction Motor Design for Urban Use Electric Vehicle. In Proceedings of the IEEE International Power Electronics and Motion Control Conference (PEMC), Varna, Bulgaria, 25–28 September 2016. [Google Scholar] [CrossRef]
- Lumyong, P.; Sarikprueck, P. A Study on Induction Motor Efficiency Improvement for Implementing in Electric Vehicle. In Proceedings of the 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Republic of Korea, 7–10 October 2018. [Google Scholar] [CrossRef]
- Takorabet, N.; Martin, J.P.; Meibody-Tabar, F.; Sharif, F.; Fontaine, P. Design and Optimization of a Permanent Magnet Axial Flux Wheel Motors for Electric Vehicle. In Proceedings of the XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012. [Google Scholar] [CrossRef]
- Hong, C.; Huang, W.; Hu, Z. Performance Calculation of a Dual Stator Solid Rotor Axial Flux Induction Motor Using the Multi-Slice and Multi-Layer Method. IEEE Trans. Magn. 2019, 55, 8100709. [Google Scholar] [CrossRef]
- Mei, J.; Zuo, Y.; Lee, C.H.T.; Kirtley, J.L. Modeling and Optimizing Method for Axial Flux Induction Motor of Electric Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 12822–12831. [Google Scholar] [CrossRef]
- Dianati, B.; Kahourzade, S.; Mahmoudi, A. Axial-Flux Induction Motors for Electric Vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, 14–17 October 2019. [Google Scholar] [CrossRef]
- Hong, C.; Huang, W.; Hu, Z. Design and analysis of a high-speed dual stator slotted solid rotor axial flux induction motor. IEEE Trans. Transport. Electrific. 2019, 5, 71–79. [Google Scholar] [CrossRef]
- Kahourzade, S.; Mahmoudi, A.; Roshandel, E.; Cao, Z. Optimal Design of Axial-Flux Induction Motors Based on an Improved Analytical Model. Energy 2021, 237, 121552. [Google Scholar] [CrossRef]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Jahns, T.M. Getting Rare-Earth Magnets Out of EV Traction Machines: A Review of the Many Approaches being Pursued to Minimize or Eliminate Rare-Earth Magnets from Future EV Drivetrains. IEEE Electrif. Mag. 2017, 5, 6–18. [Google Scholar] [CrossRef]
- Chowdhury, S.; Gurpinar, E.; Su, G.J.; Raminosoa, T.; Burress, T.A.; Ozpineci, B. Enabling Technologies for Compact Integrated Electric Drives for Automotive Traction Applications. In Proceedings of the IEEE ITEC, Detroit, MI, USA, 19–21 June 2019. [Google Scholar] [CrossRef]
- Ban, B.; Stipeti’c, S.; Klanac, M. Synchronous Reluctance Machines: Theory, Design and the Potential Use in Traction Applications. In Proceedings of the EDPE Conference, The High Tatras, Slovakia, 24–26 September 2019. [Google Scholar] [CrossRef]
- Reddy, P.B.; El-Refaie, A.M.; Galioto, S.; Alexander, J.P. Design of Synchronous Reluctance Motor Utilizing Dual-Phase Material for Traction Applications. IEEE Trans. Ind. Appl. 2017, 53, 1948–1957. [Google Scholar] [CrossRef]
- Electric Motors for Electric Vehicles 2024–2034. Available online: https://www.idtechex.com/en/research-report/electric-motors-for-electric-vehicles-2024-2034/941 (accessed on 1 March 2024).
- Copper Demand in Electric Traction Motors 2020–2030. Available online: https://internationalcopper.org/wp-content/uploads/2020/03/EV-Motors.pdf (accessed on 1 March 2024).
- Chung, S.-U.; Moon, S.-H.; Kim, D.-J.; Kim, J.-M. Development of a 20-Pole–24-Slot SPMSM with Consequent Pole Rotor for In-wheel Direct Drive. IEEE Trans. Ind. Electron. 2016, 63, 302–309. [Google Scholar] [CrossRef]
- Hou, J.; Geng, W.; Li, Q.; Zhang, Z. 3-D Equivalent Magnetic Network Modeling and FEA Verification of a Novel Axial-Flux Hybrid Excitation In-wheel Motor. IEEE Trans. Magn. 2021, 57, 1–12. [Google Scholar] [CrossRef]
- Chung, S.U.; Kim, J.W.; Chun, Y.D.; Woo, B.C.; Hong, D.K. Fractional Slot Concentrated Winding PMSM with Consequent Pole Rotor for a Low-speed Direct Drive: Reduction of Rare Earth Permanent Magnet. IEEE Trans. Energy Convers. 2015, 30, 103–109. [Google Scholar] [CrossRef]
- Chung, S.U.; Chun, Y.D.; Woo, B.C.; Hong, D.K.; Lee, J.Y. Design Considerations and Validation of Permanent Magnet Vernier Machine with Consequent Pole Rotor for Low Speed Servo Applications. J. Electr. Eng. Technol. 2013, 8, 1146–1151. [Google Scholar] [CrossRef]
- Derammelaere, S.; Haemers, M.; De Viaene, J.; Verbelen, F.; Stockman, K. A Quantitative Comparison between BLDC, PMSM, Brushed DC and Stepping Motor Technologies. In Proceedings of the ICEMS, Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Zhu, V.; Fahimi, B.; Pekarek, S. A Field Reconstruction Method for Optimal Excitation of Permanent Magnet Synchronous Machines. IEEE Trans. Energy Convers. 2006, 21, 305–313. [Google Scholar] [CrossRef]
- Wang, V.; Liu, K.; Yang, C.; Xu, V.; Ma, M. Cyber Physical Energy Optimization Control Design for PHEVs Based on Enhanced Firework Algorithm. IEEE Trans. Veh. Technol. 2021, 70, 282–291. [Google Scholar] [CrossRef]
- Islam, V.; Husain, I. Analytical Model for Predicting Noise and Vibration in Permanent-magnet Synchronous Motors. IEEE Trans. Ind. Appl. 2010, 46, 2346–2354. [Google Scholar] [CrossRef]
- Carmeli, M.S.; Dezza, F.C.; Mauri, M. Electromagnetic Vibration and Noise Analysis of an External Rotor Permanent Magnet Motor. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Taormina, Italy, 23–26 May 2006. [Google Scholar] [CrossRef]
- Wang, W.; Qie, T.; Yang, C.; Liu, W.; Xiang, C.; Huang, K. An Intelligent Lane-changing Behavior Prediction and Decision-making Strategy for an Autonomous Vehicle. IEEE Trans. Ind. Electron. 2022, 69, 2927–2937. [Google Scholar] [CrossRef]
- Qin, Y.; Wang, Z.; Yuan, K.; Zhang, Y. Comprehensive Analysis and Optimization of Dynamic Vibration-absorbing Structures for Electric Vehicles Driven by In-wheel Motors. Automot. Innov. 2019, 2, 254–262. [Google Scholar] [CrossRef]
- Husain, O.; Anwar, M.N. Radial Force Calculation and Acoustic Noise Prediction in Switched Reluctance Machines. IEEE Trans. Ind. Appl. 2000, 36, 1589–1597. [Google Scholar] [CrossRef]
- Deng, W.; Zuo, S. Electromagnetic Vibration and Noise of the Permanent-magnet Synchronous Motors for Electric Vehicles: An Overview. IEEE Trans. Transp. Electrif. 2019, 5, 59–70. [Google Scholar] [CrossRef]
- Hallal, J.; Rasid, A.H.; Druesne, F.; Lanfranchi, V. Comparison of Radial and Tangential Forces Effect on the Radial Vibrations of Synchronous Machines. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Melbourne, Australia, 13–15 February 2019. [Google Scholar] [CrossRef]
- Cheng, M.; Han, P.; Hua, W. General Airgap Field Modulation Theory for Electrical Machines. IEEE Trans. Ind. Electron. 2017, 64, 6063–6074. [Google Scholar] [CrossRef]
- Seop Koh, C.; Seol, J.-S. New Cogging-torque Reduction Method for Brushless Permanent-magnet Motors. IEEE Trans. Magn. 2003, 39, 3503–3506. [Google Scholar] [CrossRef]
- Breton, C.; Bartolome, J.; Benito, J.A.; Tassinario, G.; Lu, C.W.; Chalmers, B.J. Influence of Machine Symmetry on Reduction of Cogging Torque in Permanent-magnet Brushless Motors. IEEE Trans. Magn. 2000, 36, 3819–3823. [Google Scholar] [CrossRef]
- Park, Y.-U.; Cho, J.-H.; Kim, D.-K. Cogging Torque Reduction of Single-phase Brushless DC Motor with a Tapered Air-gap using Optimizing Notch Size and Position. IEEE Trans. Ind. Appl. 2015, 51, 4455–4463. [Google Scholar] [CrossRef]
- Das, S.; Hasan, I.; Sozer, Y.; Islam, R.; Ortega, A.P.; Klass, J. Noise and Vibration Performance in Fractional Slot Permanent Magnet Synchronous Machines Using Stator Bridge. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018. [Google Scholar] [CrossRef]
- Hwang, S.-M.; Eom, J.-B.; Jung, Y.H.; Lee, D.-W.; Kang, B.-S. Various Design Techniques to Reduce Cogging Torque by Controlling Energy Variation in Permanent Magnet Motors. IEEE Trans. Magn. 2001, 37, 2806–2809. [Google Scholar] [CrossRef]
- Fazil, M.; Rajagopal, K.R. A Novel Air-gap Profile of Single-phase Permanent-magnet Brushless DC Motor for Starting Torque Improvement and Cogging Torque Reduction. IEEE Trans. Magn. 2010, 46, 3928–3932. [Google Scholar] [CrossRef]
- Wang, D.; Wang, X.; Jung, S.-Y. Cogging Torque Minimization and Torque Ripple Suppression in Surface-mounted Permanent Magnet Synchronous Machines Using Different Magnet Widths. IEEE Trans. Magn. 2013, 49, 2295–2298. [Google Scholar] [CrossRef]
- Ling, P.P.; Ishak, D.; Tiang, T.L. Influence of Magnet Pole Arc Variation on the Performance of External Rotor Permanent Magnet Synchronous Machine Based on Finite Element Analysis. In Proceedings of the IEEE International Conference on Power and Energy (PECon), Melaka, Malaysia, 28–29 November 2016. [Google Scholar] [CrossRef]
- Ashabani, M.; Mohamed, Y.A.-R.-I. Multiobjective Shape Optimization of Segmented Pole Permanent-magnet Synchronous Machines with Improved Torque Characteristics. IEEE Trans. Magn. 2011, 47, 795–804. [Google Scholar] [CrossRef]
- Xu, L.; Sun, Z.; Zhao, W. Stator Core Loss Analysis and Suppression of Permanent Magnet Vernier Machines. IEEE Trans. Ind. Electron. 2023, 70, 12155–12167. [Google Scholar] [CrossRef]
- Pandiharu, D.K.K.; Li, G.-J.; Zhu, Z.Q.; Azar, Z.; Clark, R.; Thomas, A. Effect of Airgap Length on Electromagnetic Performance of Permanent Magnet Vernier Machines with Different Power Ratings. IEEE Trans. Ind. Appl. 2022, 58, 1920–1930. [Google Scholar] [CrossRef]
- Scuiller, F. Magnet Shape Optimization to Reduce Pulsating Torque for a Five-phase Permanent-magnet Low-speed Machine. IEEE Trans. Magn. 2014, 50, 1–9. [Google Scholar] [CrossRef]
- Liu, T.; Huang, S.; Gao, J. A Method for Reducing Cogging Torque by Magnet Shifting in Permanent Magnet Machines. In Proceedings of the ICEMS, Incheon, Republic of Korea, 10–13 October 2010. [Google Scholar]
- Zhao, W.; Lipo, T.A.; Kwon, B.-I. Material-efficient Permanent Magnet Shape for Torque Pulsation Minimization in SPM Motors for Automotive Applications. IEEE Trans. Ind. Electron. 2014, 61, 5779–5787. [Google Scholar] [CrossRef]
- Fei, W.; Zhu, Z.Q. Comparison of Cogging Torque Reduction in Permanent Magnet Brushless Machines by Conventional and Herringbone Skewing Techniques. IEEE Trans. Energy Convers. 2013, 28, 664–674. [Google Scholar] [CrossRef]
- Gong, C.; Deng, F. Design and Optimization of a High-Torque-Density Low-Torque-Ripple Vernier Machine Using Ferrite Magnets for Direct-Drive Applications. IEEE Trans. Ind. Electron. 2022, 69, 5421–5431. [Google Scholar] [CrossRef]
- Toba, T.; Lipo, T.A. Generic Torque-maximizing Design Methodology of Surface Permanent-magnet Vernier Machine. IEEE Trans. Ind. Appl. 2000, 36, 1539–1546. [Google Scholar] [CrossRef]
- Jang, D.K.; Chang, J.H. Investigation of Doubly Salient Structure for Permanent Magnet Vernier Machines using Flux Modulation Effects. IEEE Trans. Energy Convers. 2019, 34, 2019–2028. [Google Scholar] [CrossRef]
- Xu, L.; Zhao, W.; Li, R.; Niu, S. Analysis of Rotor Losses in Permanent Magnet Vernier Machines. IEEE Trans. Ind. Electron. 2022, 62, 1224–1234. [Google Scholar] [CrossRef]
- Tlali, P.L.; Wang, R.-J.; Gerber, S.; Botha, C.D.; Kamper, M.J. Design and Performance Comparison of Vernier and Conventional PM Synchronous Wind Generators. IEEE Trans. Ind. Appl. 2020, 56, 2570–2579. [Google Scholar] [CrossRef]
- Yu, Y.; Chai, F.; Pei, Y.; Chen, L. Comparisons of Torque Performance in Surface-mounted PM Vernier Machines with Different Stator Tooth Topologies. IEEE Trans. Ind. Appl. 2019, 55, 3671–3684. [Google Scholar] [CrossRef]
- Xu, L.; Zhao, W.; Liu, G.; Song, C. Design Optimization of a Spoke-type Permanent-magnet Vernier Machine for Torque Density and Power Factor Improvement. IEEE Trans. Veh. Technol. 2019, 68, 3446–3456. [Google Scholar] [CrossRef]
- Zhang, H.; Hua, W.; Wu, Z.; Zhu, X. Design Considerations of Novel Modular-Spoke-Type Permanent Magnet Machines. IEEE Trans. Ind. Appl. 2018, 54, 4236–4245. [Google Scholar] [CrossRef]
- Fang, L.; Ren, X.; Qu, R. A Novel Permanent Magnet Vernier Machine with Coding-Shaped Tooth. IEEE Trans. Ind. Electron. 2022, 69, 6058–6068. [Google Scholar] [CrossRef]
- Zhu, X.; Jiang, M.; Xiang, Z.; Quan, L.; Hua, W.; Cheng, M. Design and Optimization of a Flux-Modulated Permanent Magnet Motor Based on an Airgap-Harmonic-Orientated Design Methodology. IEEE Trans. Ind. Electron. 2020, 67, 5337–5348. [Google Scholar] [CrossRef]
- Mei, J.; Lee, C.; Kirtley, J.L. Design of Axial Flux Induction Motor with Reduced Back Iron for Electric Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 293–301. [Google Scholar] [CrossRef]
- Dianati, B.; Kahourzade, S.; Mahmoudi, A. Optimization of Axial-Flux Induction Motors for the Application of Electric Vehicles Considering Driving Cycles. IEEE Trans. Energy Convers. 2020, 35, 1522–1533. [Google Scholar] [CrossRef]
- Hong, C.; Huang, W.; Hu, Z. Parameters and Performance Analysis of a Dual Stator Composite Rotor Axial Flux Induction Motor by an Analytical Method. IET Electr. Power Appl. 2018, 12, 1158–1165. [Google Scholar] [CrossRef]
- Gan, C.; Wu, J.; Sun, Q.; Kong, W.; Li, H.; Hu, Y. A Review on Machine Topologies and Control Techniques for Low-noise Switched Reluctance Motors in Electric Vehicle Applications. IEEE Access 2018, 6, 31430–31443. [Google Scholar] [CrossRef]
- Lin, J.; Lambert, T.; Yang, Y.; Bilgin, B.; Lankin, R.; Emadi, A. A novel axial flux switched reluctance motor with multi-level air gap geometry. In Proceedings of the IEEE Electrical Power and Energy Conference (EPEC), Ottawa, ON, Canada, 12–14 October 2016. [Google Scholar] [CrossRef]
- Pan, Z.; Song, S.; Ma, R. A novel axial flux switched reluctance machine with segmented stator and rotor. In Proceedings of the 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017. [Google Scholar] [CrossRef]
- Andrada, P.; Martinez, E.; Torrent, M.; Blanque, B.; Perat, J.I. Novel in-wheel axial-flux segmented switched reluctance motor. In Proceedings of the 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017. [Google Scholar] [CrossRef]
- Kesgin, M.G.; Han, P.; Taran, N.; Lawhorn, D.; Lewis, D.; Ionel, D.M. Design Optimization of Coreless Axial-flux PM Machines with Litz Wire and PCB Stator Windings. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020. [Google Scholar] [CrossRef]
- Bonnet, M.; Lefevre, Y.; Llibre, J.; Harribey, D.; Defay, F.; Sadowski, N. 3d Magnetic Field Model of a Permanent Magnet Ironless Axial Flux Motor with Additively Manufactured Non-active Parts. In Proceedings of the 19th International Symposium on Electromagnetic Fields (ISEF), Nancy, France, 29–31 August 2019. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, C.; Geng, W. Design and Optimization of Halbach-Array PM Rotor for High-Speed Axial-Flux Permanent Magnet Machine with Ironless Stator. IEEE Trans. Ind. Electron. 2020, 67, 7269–7279. [Google Scholar] [CrossRef]
- Liben, M.; Ludois, D.C. Analytical Design and Experimental Testing of a Self-cooled, Toroidally Wound Ring Motor with Integrated Propeller for Electric Rotorcraft. IEEE Trans. Ind. Appl. 2021, 57, 2342–2353. [Google Scholar] [CrossRef]
- Ghaheri, A.; Mohammadi Ajamloo, A.M.; Torkaman, H.; Afjei, E. Design, Modelling and Optimisation of a Slot-less Axial Flux Permanent Magnet Generator for Direct-drive Wind Turbine Application. IET Electr. Power Appl. 2020, 14, 1327–1338. [Google Scholar] [CrossRef]
- Syed, Q.A.S.; Solovieva, V.; Hahn, I. Magnetization Characteristics and Loss Measurements of the Axial Flux Permanent Magnet Motor’s Stator. In Proceedings of the IEEE International Electric Machines Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019. [Google Scholar] [CrossRef]
- Sun, S.; Jiang, F.; Li, T.; Xu, B.; Yang, K. Comparison of a Multi-stage Axial Flux Permanent Magnet Machine with Different Stator Core Materials. IEEE Trans. Appl. Supercond. 2020, 30, 1–6. [Google Scholar] [CrossRef]
- Neethu, S.; Nikam, S.P.; Pal, S.; Wankhede, A.K.; Fernandes, B.G. Performance Comparison between PCB-stator and Laminated-core-stator-based Designs of Axial Flux Permanent Magnet Motors for High-speed Low-power Applications. IEEE Trans. Ind. Electron. 2020, 67, 5269–5277. [Google Scholar] [CrossRef]
- Wang, Z.; Masaki, R.; Morinaga, S.; Enomoto, Y.; Itabashi, H.; Ito, M.; Tanigawa, S. Development of an Axial Gap Motor with Amorphous Metal Cores. IEEE Trans. Ind. Appl. 2011, 47, 1293–1299. [Google Scholar] [CrossRef]
- Tiismus, H.; Kallaste, A.; Vaimann, T.; Rassõlkin, A.; Belahcen, A. Additive Manufacturing of Prototype Axial flux Switched Reluctance Machine. In Proceedings of the 28th International Workshop on Electric Drives: Improving Reliability of Electric Drives (IWED), Moscow, Russia, 27–29 January 2021. [Google Scholar] [CrossRef]
- Chaudhary, V.; Mantri, S.A.; Ramanujan, R.V.; Banerjee, R. Additive Manufacturing of Magnetic Materials. Prog. Mater. Sci. 2020, 114, 100688. [Google Scholar] [CrossRef]
- Tiismus, H.; Kallaste, A.; Belahcen, A.; Vaimann, T.; Rassõlkin, A.; Lukichev, D. Hysteresis Measurements and Numerical Losses Segregation of Additively Manufactured Silicon Steel for 3D Printing Electrical Machines. Appl. Sci. 2020, 10, 6515. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, J.; Liu, C.; Lei, G.; Guo, Y.; Zhu, J. Development of a High-Performance Axial Flux PM Machine with SMC Cores for Electric Vehicle Application. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Kim, C.-W.; Jang, G.-H.; Kim, J.-M.; Ahn, J.-H.; Baek, C.-H.; Choi, J.-Y. Comparison of Axial Flux Permanent Magnet Synchronous Machines with Electrical Steel Core and Soft Magnetic Composite Core. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Winterborne, D.; Stannard, N.; Sjoberg, L.; Atkinson, G. An Air-Cooled YASA Motor for in-Wheel Electric Vehicle Applications. IEEE Trans. Ind. Appl. 2020, 56, 6448–6455. [Google Scholar] [CrossRef]
- Noh, M.D.; Kim, J.; Park, Y.-W. Comparisons of Concentrated Printed-circuit Stator Windings for Axial Flux Permanent Magnet Machines. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019. [Google Scholar] [CrossRef]
- Paul, S.; Farshadnia, M.; Pouramin, A.; Fletcher, J.; Chang, J. Comparative Analysis of Wave Winding Topologies and Performance Characteristics in Ultra-thin Printed Circuit Board Axial-flux PM Machine. IET Electr. Power Appl. 2019, 13, 694–701. [Google Scholar] [CrossRef]
- Usman, H.; Ikram, J.; Alimgeer, K.; Yousuf, M.; Bukhari, S.; Ro, J.-S. Analysis and Optimization of Axial Flux Permanent Magnet Machine for Cogging Torque Reduction. Mathematics 2021, 9, 1738. [Google Scholar] [CrossRef]
- Ali, S.; Rubino, G.; Ciprini, L.; Ali, R.; Marignetti, F. Comparative Study among Different Rotor Topologies of Axial Flux Permanent Magnet Machines. In Proceedings of the 2nd International Conference on Sustainable Mobility Applications, Renewables and Technology (SMART), Cassino, Italy, 23–25 November 2022. [Google Scholar] [CrossRef]
- Schwarz, P.; Mockel, A. Air gap influence in axial flux machines with different excitation. In Proceedings of the 9th International Electric Drives Production Conference (EDPC), Esslingen, Germany, 3–4 December 2019. [Google Scholar] [CrossRef]
- Geng, W.; Hou, J.; Li, O. Electromagnetic Analysis and Efficiency Improvement of Axial-Flux Permanent Magnet Motor with Yokeless Stator by Using Grain-Oriented Silicon Steel. IEEE Trans. Magn. 2022, 58, 8200905. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, X.; Gao, P.; Li, T. A New Parallel Magnetic Circuit Axial Flux Permanent Magnet In-Wheel Motor. In Proceedings of the 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021. [Google Scholar] [CrossRef]
- Taran, N.; Heins, G.; Rallabandi, V.; Patterson, D.; Ionel, D.M. Evaluating the Effects of Electric and Magnetic Loading on the Performance of Single- and Double-Rotor Axial-Flux PM Machines. IEEE Trans. Ind. Appl. 2020, 56, 3488–3497. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, F.; Yang, K. Analysis and Optimization of the Axial Electromagnetic Force for an Axial-Flux Permanent Magnet Vernier Machine. IEEE Trans. Magn. 2021, 57, 8100605. [Google Scholar] [CrossRef]
- Taran, N.; Rallabandi, V.; Heins, G.; Ionel, D.M. Coreless and Conventional Axial Flux Permanent Magnet Motors for Solar Cars. IEEE Trans. Ind. Appl. 2018, 54, 5907–5917. [Google Scholar] [CrossRef]
- Rahman, M.S.; Lukman, G.F.; Hieu, P.T.; Jeong, K.-I.; Ahn, J.-W. Optimization and Characteristics Analysis of High Torque Density 12/8 Switched Reluctance Motor Using Metaheuristic Gray Wolf Optimization Algorithm. Energies 2021, 14, 2013. [Google Scholar] [CrossRef]
- Pupadubsin, R.; Kachapornkul, S.; Jitkreeyarn, P.; Somsiri, P.; Tungpimolrut, K. Investigation of Torque Performance and Flux Reversal Reduction of a Three-Phase 12/8 Switched Reluctance Motor Based on Winding Arrangement. Energies 2022, 15, 284. [Google Scholar] [CrossRef]
- Rallabandi, V.; Han, P.; Wu, J.; Cramer, A.M.; Ionel, D.M.; Zhou, P. Design Optimization and Comparison of Direct-Drive Outer-Rotor SRMs Based on Fast Current Profile Estimation and Transient FEA. IEEE Trans. Ind. Appl. 2021, 57, 236–245. [Google Scholar] [CrossRef]
- Abhijith, V.; Hossain, M.J.; Lei, G.; Premlal, A.S. Performance Improvement of Switched Reluctance Motor Using Hybrid Excitation Method without Permanent Magnets. In Proceedings of the 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021. [Google Scholar] [CrossRef]
- Ding, W.; Fu, H.; Hu, Y. Characteristics Assessment and Comparative Study of a Segmented-Stator Permanent-Magnet Hybrid-Excitation SRM Drive with High-Torque Capability. IEEE Trans. Power Electron. 2018, 33, 482–500. [Google Scholar] [CrossRef]
- Ding, W.; Yang, S.; Hu, Y.; Li, S.; Wang, T.; Yin, Z. Design Consideration and Evaluation of a 12/8 High-torque Modular-stator Hybrid Excitation Switched Reluctance Machine for EV Applications. IEEE Trans. Ind. Electron. 2017, 64, 9221–9232. [Google Scholar] [CrossRef]
- Davarpanah, G.; Faiz, J.; Shirzad, H. A C-Core Connected Two-Phase Switched Reluctance Motor with Embedded Permanent Magnets for Developed Torque Enhancement. IEEE Trans. Ind. Electron. 2024, 71, 2332–2342. [Google Scholar] [CrossRef]
- Ding, W.; Bian, H.; Song, K.; Li, Y.; Li, K. Enhancement of a 12/4 Hybrid-Excitation Switched Reluctance Machine with Both Segmented-Stator and -Rotor. IEEE Trans. Ind. Electron. 2021, 68, 9229–9241. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Lei, G.; Guo, Y.; Zhu, J. Multiobjective System Level Optimization Method for Switched Reluctance Motor Drive Systems Using Finite-Element Model. IEEE Trans. Ind. Electron. 2020, 67, 10055–10064. [Google Scholar] [CrossRef]
- Lan, Y.; Frikha, M.A.; Croonen, J.; Benômar, J.; Baghdadi, M.; Hegazy, O. Design Optimization of a Switched Reluctance Machine with an Improved Segmental Rotor for Electric Vehicle Applications. Energies 2022, 15, 5772. [Google Scholar] [CrossRef]
- Lan, Y.; Peng, W.; Aksoz, A.; Benomar, Y.; Van den Bossche, P.; El Baghdadi, M.; Hegazy, O. Design and Modelling of 12/4 Fully-Pitched Segmental Switched Reluctance Motors. In Proceedings of the 2020 Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 10–12 September 2020. [Google Scholar] [CrossRef]
- Jiang, J.W.; Bilgin, B.; Emadi, A. Three-Phase 24/16 Switched Reluctance Machine for a Hybrid Electric Powertrain. IEEE Trans. Transp. Electrif. 2017, 3, 76–85. [Google Scholar] [CrossRef]
- Kucuk, F.; Nakamura, T. Torque Density and Efficiency Improvement of a Switched Reluctance Motor via Low-cost Permanent Magnets. In Proceedings of the XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar] [CrossRef]
- Zhou, G.; Zhang, C.; Li, F.; Wang, H.; Zhu, M.; Song, N.; Guo, L. An improved Two-phase Modular Switched Reluctance Motor with Segmented Stator. In Proceedings of the 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020. [Google Scholar] [CrossRef]
- Wang, H.; Liu, T.; Li, H. Comprehensive Investigation of an Improved Two-Phase Modular PM-Assisted Switched Reluctance Motor for Enhanced Torque Performance. IEEE Trans. Energy Convers. 2022, 37, 1263–1271. [Google Scholar] [CrossRef]
- Prabhu, S.; Balaji, M. Performance Analysis of Permanent Magnet Assisted Outer Rotor Switched Reluctance Motor with Non-Oriented Laminating Material for Electric Transportation Systems. In Proceedings of the 2nd International Conference on Sustainable Energy and Future Electric Transportation, Hyderabad, India, 4–6 August 2022. [Google Scholar] [CrossRef]
- Wang, H.; Xue, Y.; Du, J.; Li, H. Design and Evaluation of Modular Stator Hybrid-Excitation Switched Reluctance Motor for Torque Performance Improvement. IEEE Trans. Ind. Electron. 2024, in press. [Google Scholar] [CrossRef]
- Vahedi, P.; Ganji, B.; Afjei, E. Multi-layer Switched Reluctance Motors: Performance Prediction and Torque Ripple Reduction. Int. Trans. Electr. Energy Syst. 2019, 30, e12215. [Google Scholar] [CrossRef]
- Lukman, G.F.; Nguyen, X.S.; Ahn, J.-W. Design of a Low Torque Ripple Three-Phase SRM for Automotive Shift-by-Wire Actuator. Energies 2020, 13, 2329. [Google Scholar] [CrossRef]
- Salunke, N.A.; Patel, A.N.; Panchal, T.H. Torque Ripple Reduction of Switched Reluctance Motor by Changing the Rotor Pole Tip Radius. Int. J. Recent Technol. Eng. 2019, 8, 4256–4259. [Google Scholar] [CrossRef]
- Cheng, H.; Liao, S.; Yan, W. Development and Performance Analysis of Segmented-Double-Stator Switched Reluctance Machine. IEEE Trans. Ind. Electron. 2022, 69, 1298–1309. [Google Scholar] [CrossRef]
- Cosoroaba, E.; Bostanci, E.; Li, Y.N.; Wang, W.; Fahimi, B. Comparison of Winding Configurations in Double-stator Switched Reluctance Machines. IET Electr. Power Appl. 2017, 11, 1407–1415. [Google Scholar] [CrossRef]
- Asgar, M.; Afjei, E.; Torkaman, H. A New Strategy for Design and Analysis of a Double-stator Switched Reluctance Motor: Electromagnetics, FEM, and Experiment. IEEE Trans. Magn. 2015, 51, 1–8. [Google Scholar] [CrossRef]
- Farahani, E.F.; Kondelaji, M.A.; Mirsalim, M. A New Exterior-Rotor Multiple Teeth Switched Reluctance Motor with Embedded Permanent Magnets for Torque Enhancement. IEEE Trans. Magn. 2020, 56, 8100405. [Google Scholar] [CrossRef]
- Ghaffarpour, A.; Mirsalim, M. Split-Tooth Double-Rotor Permanent Magnet Switched Reluctance Motor. IEEE Trans. Electrif. 2022, 8, 2400–2411. [Google Scholar] [CrossRef]
- Farahani, E.F.; Kondelaji, M.A.; Mirsalim, M. An Innovative Hybrid-Excited Multi-Tooth Switched Reluctance Motor for Torque Enhancement. IEEE Trans. Ind. Electron. 2021, 68, 982–992. [Google Scholar] [CrossRef]
- Saiteja, P.; Ashok, B. Critical Review on Structural Architecture, Energy Control Strategies and Development Process towards Optimal Energy Management in Hybrid Vehicles. Renew. Sustain. Energy Rev. 2022, 157, 12038. [Google Scholar] [CrossRef]
- Toker, K.; Tosun, O.; Serteller, N.F.; Topuz, V. Design, Optimization and Experimental Study of Axial and Hub BLDC Motors in-Wheel Application for Light Electric Vehicles. In Proceedings of the IEEE 21st Mediterranean Electrotechnical Conference, Palermo, Italy, 14–16 June 2022. [Google Scholar] [CrossRef]
- Prabhu, N.; Thirumalaivasan, R.; Ashok, B. Critical Review on Torque Ripple Sources and Mitigation Control Strategies of BLDC Motors in Electric Vehicle Applications. IEEE Access 2023, 11, 115699–115739. [Google Scholar] [CrossRef]
- Thenmozhi, G.; Radhika, A.; Mithun, B.; Dhineesh, M.; Abissek, B. A Simulation-based Investigation on the Performance of BLDC Motor Used in Electric Vehicles for Varied Magnetic Materials. In Proceedings of the 8th International Conference on Advanced Computing and Communication Systems, Coimbatore, India, 25–26 March 2022. [Google Scholar] [CrossRef]
- Kumar, A.; Gandhi, R.; Wilson, R.; Roy, R. Analysis of Permanent Magnet BLDC Motor Design with Different Slot Type. In Proceedings of the IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy, Cochin, India, 2–4 January 2020. [Google Scholar] [CrossRef]
- Seung, N.H.; Been, K.S.; Gwan, K.M.; Byung, K.K.; Soo, P.G. Design and Analysis of BLDC Motor for Improving Regenerative Characteristics in Personal Mobility. In Proceedings of the IEEE Student Conference on Electric Machines and Systems, Busan, Republic of Korea, 1–3 November 2019. [Google Scholar] [CrossRef]
- Virlan, B.; Munteanu, A.; Livadaru, L.; Bobu, A.; Simion, A.; Nacu, I. Design and Optimization of a BLDC Motor for Small Power Vehicles. In Proceedings of the International Conference on Electromechanical and Energy Systems (SIELMEN), Iasi, Romania, 6–8 October 2021. [Google Scholar] [CrossRef]
- Song, M.S.; Um, D.Y.; Chae, S.A.; Park, G.S. Optimal Slot-Pole Combination of In-Wheel BLDC Motor for High Performance Personal Mobility. In Proceedings of the IEEE 6th Student Conference on Electric Machines and Systems, Huzhou, China, 7–9 December 2023. [Google Scholar] [CrossRef]
- Cabuk, A.S.; Saglam, S.; Ustun, O. Impact of Various Slot-Pole Combinations on an In-wheel BLDC Motor Performance. J. Electr. Electron. Eng. 2017, 17, 3369–3375. [Google Scholar]
- Kurinjimalar, L.; Balaji, M.; Prabhu, S.; Umadev, R. Analysis of Electromagnetic and Vibration Characteristics of a Spoke Type PMBLDC Motor. J. Electr. Eng. Technol. 2021, 16, 2647–2660. [Google Scholar] [CrossRef]
- Tosun, O.; Serteller, N.F.; Yalcin, G. Comprehensive Design and Optimization of Brushless Direct Current Motor for the Desired Operating Conditions. In Proceedings of the 25th International Conference Electronics, Palanga, Lithuania, 14–16 June 2021. [Google Scholar] [CrossRef]
- Vadde, A.; Sachin, S. Influence of Rotor Design in BLDC Motor for Two-Wheeler Electric Vehicle. In Proceedings of the 1st International Conference on Power Electronics and Energy (ICPEE), Bhubaneswar, India, 2–3 January 2021. [Google Scholar] [CrossRef]
- Prabu, S.; Arun, V.; Balaji, M.; Kalaimagal, V.; Manikandan, A.; Chandrasekar, V. Electromagnetic Analysis on Brushless DC Hub Motor for Electrified Transportation Systems. In Proceedings of the 9th International Conference on Electrical Energy Systems (ICEES), Chennai, India, 23–25 March 2023. [Google Scholar] [CrossRef]
- Boztas, G.; Yildirim, M.; Aydogmus, O. Design and Analysis of Multi-Phase BLDC Motors for Electric Vehicles, Engineering. Technol. Appl. Sci. Res. 2018, 8, 2646–2650. [Google Scholar] [CrossRef]
- Hussain, M.; Ulasyar, A.; Zad, H.S.; Khattak, A.; Nisar, S.; Imran, K. Design and Analysis of a Dual Rotor Multiphase Brushless DC Motor for its Application in Electric Vehicles. Eng. Technol. Appl. Sci. Res. 2021, 11, 7846–7852. [Google Scholar] [CrossRef]
- Tosun, O.; Serteller, N.F. The Design of the Outer-Rotor Brushless DC Motor and an Investigation of Motor Axial-Length-to-Pole-Pitch Ratio. Sustainability 2022, 14, 12743. [Google Scholar] [CrossRef]
- Leitner, S.; Gruebler, H.; Muetze, A. Low-Cost BLDC Claw-Pole Motor Design for Fan Applications with Reduced Cogging Torque and Balanced Axial Forces. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition, New Orleans, LA, USA, 15–19 March 2020. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Electric Motor | Power Range (kW) | Weight Range (kg) | Power-to-Weight Ratio (kW/kg) |
|---|---|---|---|
| PM | up to 630 | up to 350 | 1–8 |
| ACIM | 50–250 | 50–300 | 1–2.5 |
| Axial Flux | up to 630 | up to 120 | 1–8 |
| In-wheel | up to 240 | up to 40 | 1–8 |
| SRM | up to 200 | up to 80 | 1.5–3 |
| WRSM | up to 200 | 50–120 | 1–2 |
| Evaluated Parameter | Motor Type | ||||
|---|---|---|---|---|---|
| ACIM | PMSM | PMSR | WRSM | BLDC | |
| Controllability | 10 | 8 | 8 | 7 | 8 |
| Motor cost | 8 | 6 | 7 | 8 | 9 |
| Efficiency | 6 | 9 | 10 | 7 | 5 |
| Ease of manufacture | 8 | 7 | 7 | 8 | 7 |
| Noise level | 7 | 10 | 10 | 8 | 7 |
| Power density | 9 | 10 | 9 | 7 | 8 |
| Reliability | 9 | 7 | 7 | 9 | 8 |
| Scalability | 8 | 7 | 7 | 9 | 7 |
| Torque density | 9 | 10 | 9 | 7 | 8 |
| Proposed Design Changes | Cogging Torque Reduction | Torque Ripple Reduction | Average Torque Increase |
| Stator tooth Shaping | 60% [58], 85% [59], 30% [60], 40% [77] | 40% [77], 50% [82] | 50% [81], 12% [82] |
| Stator bridge (wedges) | 300% [61] | 5% [61] | |
| Angle of the magnet pole | 600% [62], 700% [65], 90% [66] | 300% [65], 250% [81] | 30% [79] |
| Magnet edge shaping | 500% [62], 1000% [69], 100% [70], 86% [71], 5000% [72], 86% [81] | 1000% [69], 75% [71] | |
| Slot/pole magnet combination | 1000% [68] | 1000% [64], 1000% [68] | −5% [64] |
| Proposed Design Changes | Cogging Torque Reduction | Torque Ripple Reduction | Average Torque Increase |
|---|---|---|---|
| Stator tooth shaping | −2% [113] | ||
| Angle of the magnet pole | 9% [111] | ||
| Magnet edge shaping | 36% [107], 200% [108] | 30% [107] | |
| Multi-disc stator | 20% [114] |
| Proposed Design Changes | Cogging Torque | Torque Ripple Reduction | Average Torque Increase |
|---|---|---|---|
| Stator and rotor poles shaping | 30% [119], 66% [123], 30% [126], 10% [127], 60% [133] | 120% [115], 20% [119], 40% [123], 17% [126] | |
| Winding arrangement/hybrid excitation | 1500% [116], 300% [118], 50% [134] | 1000% [116], 300% [118], 10% [134] | |
| Stator pole/rotor pole/core material combination | 25% [130] | 200% [117], 45% [124], 20% [125], 35% [130], 100% [139] | 350% [124], 20% [125], 10% [130] |
| Size of the magnet pole/rotor pole arc | ~0 [121,122,128,129,138,139] | 12% [120] | −40% [120], 20% [120], 250% [121,122], 60% [127], 46% [128], 100% [138], 60% [139] |
| Multi-layer rotor | 2000% [130] |
| Proposed Design Changes | Cogging Torque | Torque Ripple Reduction | Average Torque Increase |
|---|---|---|---|
| Stator slot and rotor poles shaping | 18% [145] | 8% [149] | |
| Slot/pole combination | 0.23% [148] | 26% [149], 10,000% [150] | |
| Stator pole/rotor pole/core material combination | 1.5% [144] | ||
| Size of the magnet pole/rotor pole arc | 1.5% [144], −22% [151] | 100% [153] | 3% [151], 3% [153] |
| Skew of the stator slot | ~0–20% [147], −2000% [151], −300% [157] | 20% [157] | 40% [147] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gmyrek, Z. Optimal Electric Motor Designs of Light Electric Vehicles: A Review. Energies 2024, 17, 3462. https://doi.org/10.3390/en17143462
Gmyrek Z. Optimal Electric Motor Designs of Light Electric Vehicles: A Review. Energies. 2024; 17(14):3462. https://doi.org/10.3390/en17143462
Chicago/Turabian StyleGmyrek, Zbigniew. 2024. "Optimal Electric Motor Designs of Light Electric Vehicles: A Review" Energies 17, no. 14: 3462. https://doi.org/10.3390/en17143462
APA StyleGmyrek, Z. (2024). Optimal Electric Motor Designs of Light Electric Vehicles: A Review. Energies, 17(14), 3462. https://doi.org/10.3390/en17143462