
Power Allocation Control Strategy of DC/DC Converters Based on Sliding Mode Control

Abstract
:1. Introduction
2. DC Microgrid System Structure
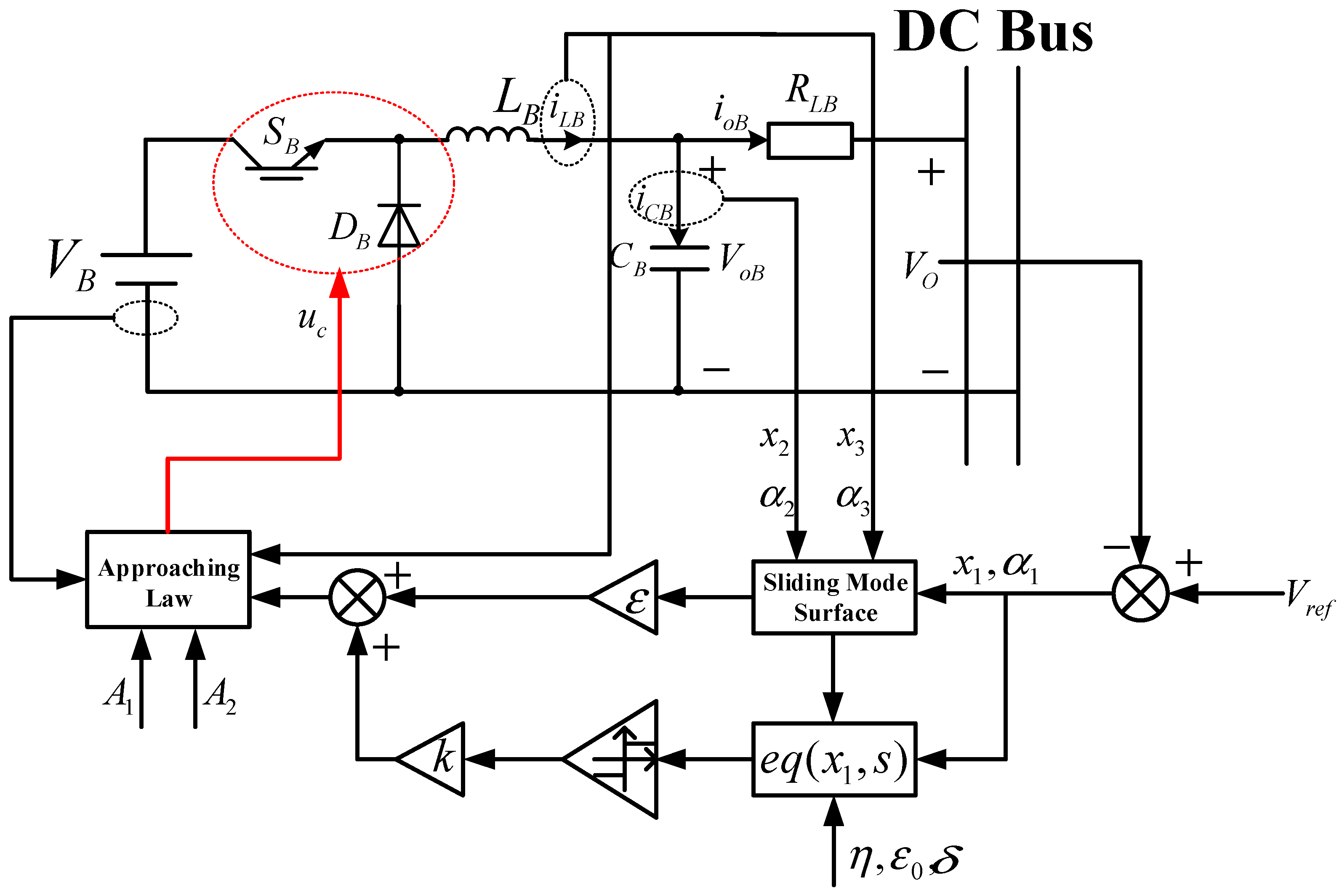
3. SMC of a Single Bidirectional DC/DC Converter
3.1. Sliding Mode Controller Design
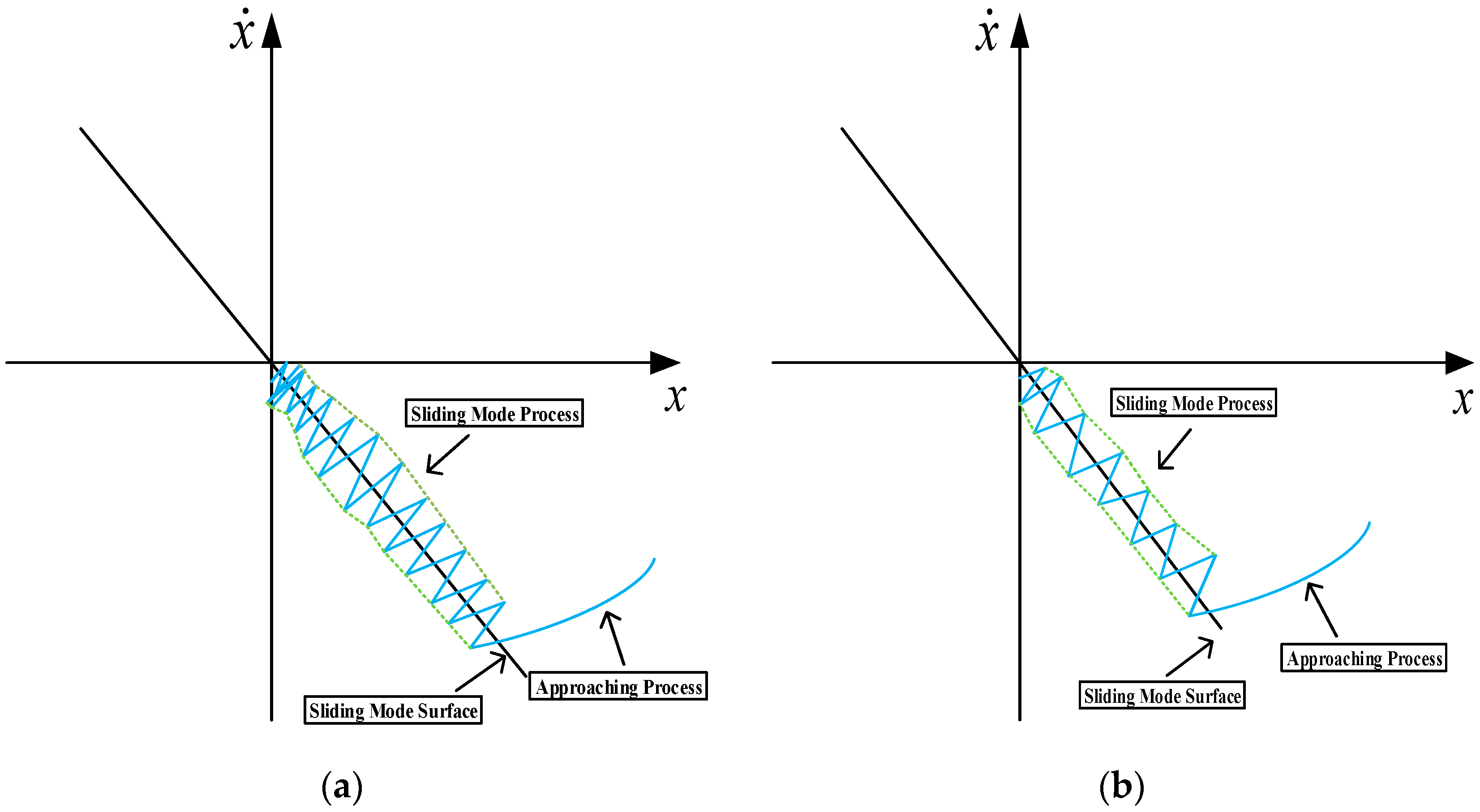
3.2. Stability Verification of the Improved Sliding Mode Reaching Law
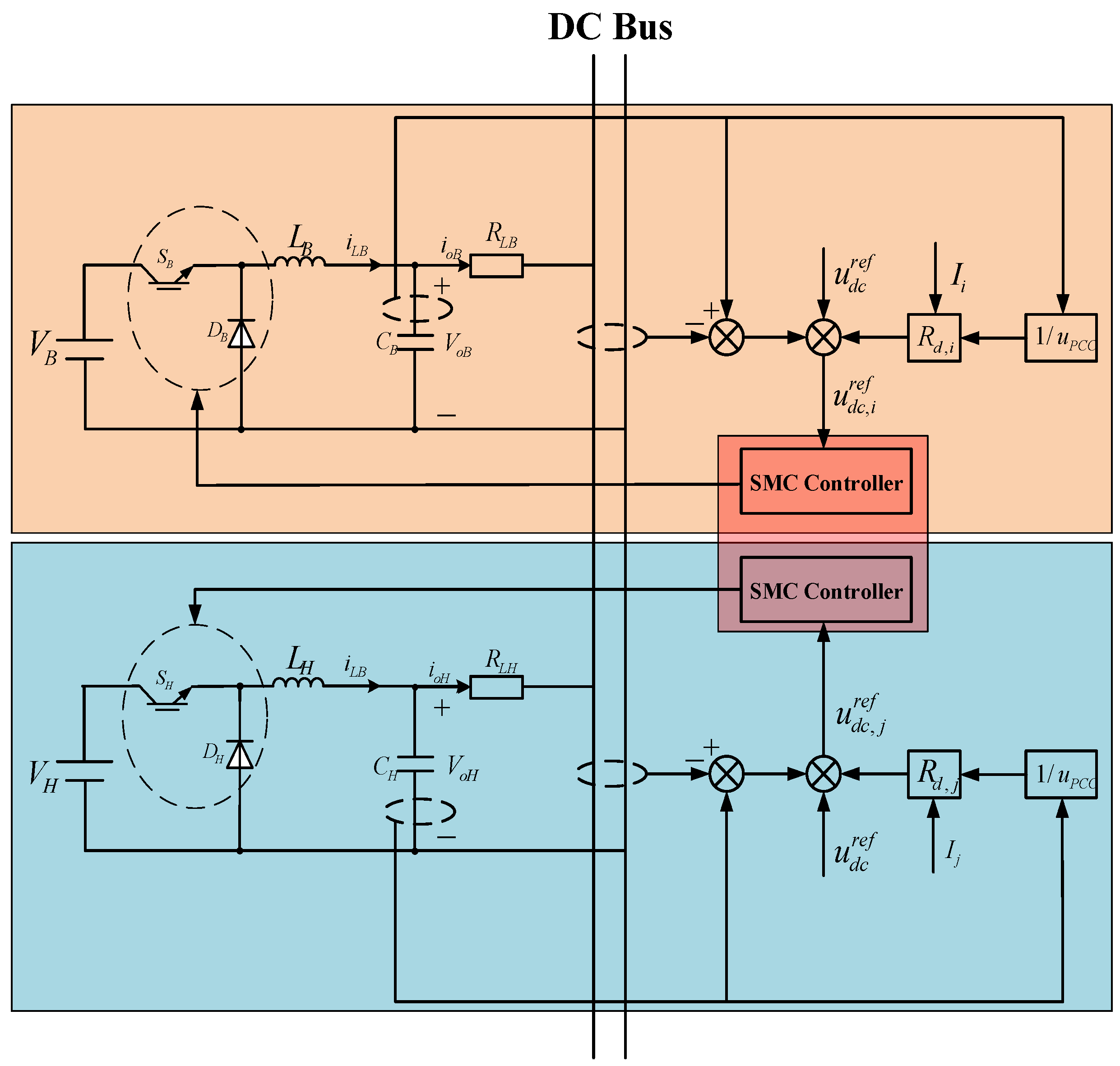
4. Power Allocation Control of Parallel Bidirectional DC/DC Converters
4.1. Improved Droop Controller Design
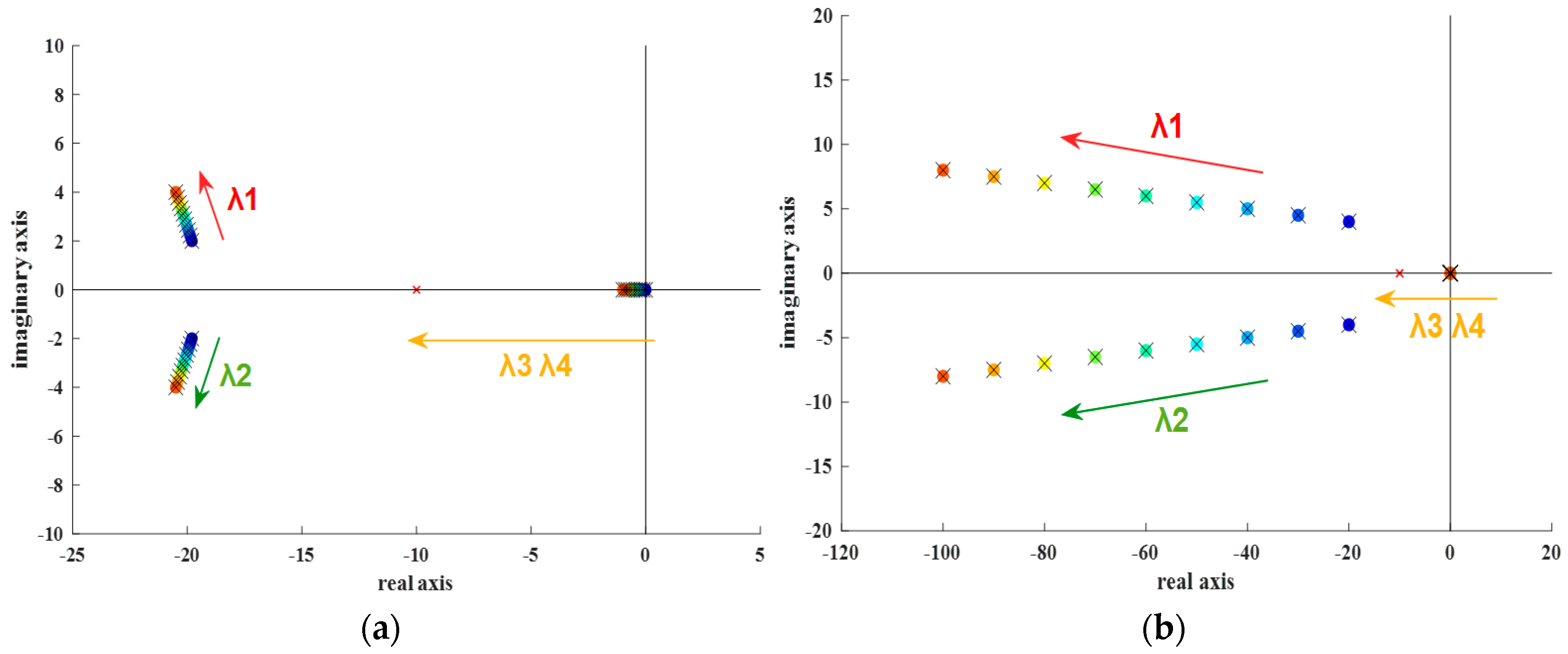
4.2. Stability Verification of the Improved Droop Control
5. Experimental Verification
5.1. DC Bus Voltage Comparison When the Load Power Changes
5.2. Comparison of Power Allocation Accuracy When Load Power Changes
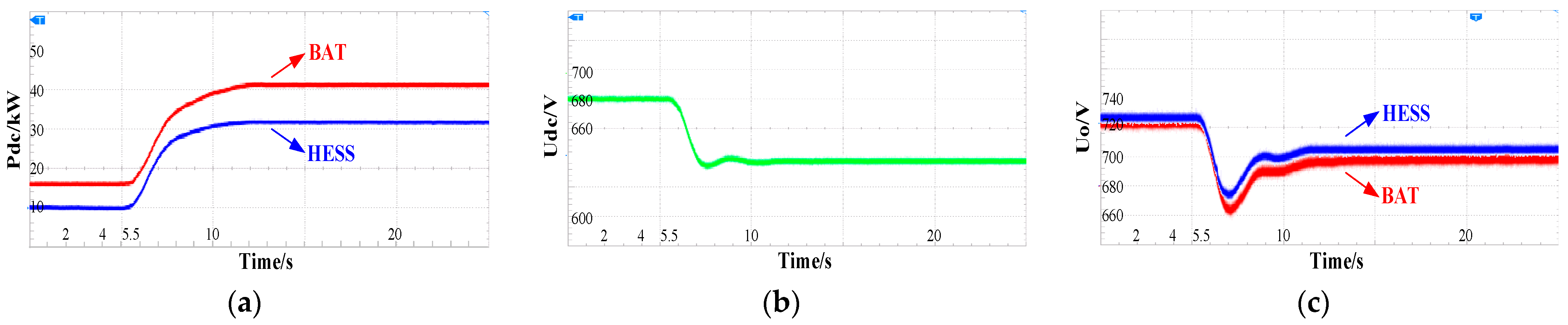
5.2.1. Condition 1: The Output Ratio of Two Energy Storage Modules Is 1:1 (50:50)
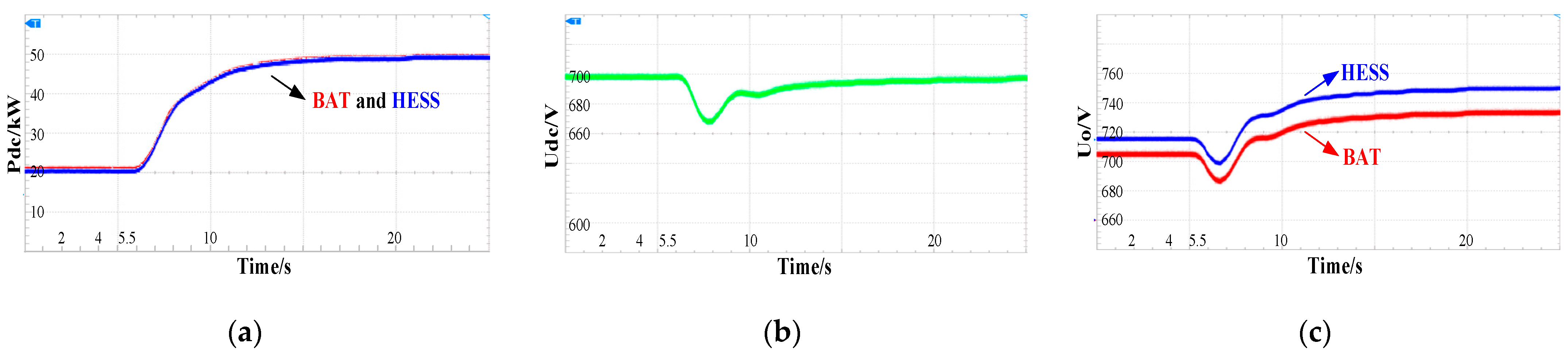
5.2.2. Condition 2: The Output Ratio of Two Energy Storage Modules Is 3:2 (60:40)
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, J.; Han, X.; Wang, L.; Peng, Z.; Jing, W. Operation and control strategy of DC Microgrid. Power Syst. Technol. 2014, 38, 2356–2362. [Google Scholar]
- Rui, L.; Maksimovic, D.; Leyva, R. Second-order sliding mode controlled synchronous buck DC-DC converter. IEEE Trans. Power Electron. 2016, 31, 2539–2549. [Google Scholar]
- Ni, Y.; Xu, J. Analysis of Quasi-sliding-mode switching control for DC-DC converters. Chin. J. Electr. Eng. (Proc. CSEE) 2008, 28, 1–6. [Google Scholar]
- Agarwal, A.; Deekshitha, K.; Singh, S.; Fulwani, D. Sliding mode control of a bidirectional DC-DC converter with constant power load. In Proceedings of the IEEE First International Conference on DC Microgrids, Atlanta, GA, USA, 7–10 June 2015; pp. 287–292. [Google Scholar]
- Andrzej, B.; Pawet, L. Discrete time sliding mode control with reduced switching-Anew reaching law approach. Int. J. Robust Nonlinear Control 2016, 26, 47–68. [Google Scholar]
- Tarchata, G. Sliding Mode Speed Control of an Induction Motor Drive Using Time-Varying Switching Line. Power Electron. Drives 2017, 2, 105–120. [Google Scholar]
- Zhang, X.G.; Zhao, K.; Sun, L.; An, Q.T. Novel convergence rate control for sliding mode variable structure speed control system of permanent magnet synchronous motor. Chin. J. Electr. Eng. 2011, 31, 77–82. [Google Scholar]
- OscarIvan, H.M.; Mauricio, S.J.; Hernando, D.M. Discrete-time variable structure control for switching converters. In Proceedings of the IEEE/PES Transmission and Distribution Conference and Exposition, Denver, CO, USA, 16–19 April 2018. [Google Scholar]
- Sharma, N.K.; Janardhanan, S. A Novel Second-order Recursive Reaching Law based Discrete-time Sliding Mode Control. IFAC Pap. Online 2016, 49, 225–229. [Google Scholar] [CrossRef]
- Dai, P.; Xu, N.; Xie, H.; Lv, Y. Fast power convergence law control of permanent magnet synchronous motor speed control system. J. Electr. Mach. Control 2017, 21, 32–38. [Google Scholar]
- Li, Z.; Hu, G.; Cui, J.; Liu, G. Integral sliding mode variable structure control of permanent magnet synchronous motor speed control system. Chin. J. Electr. Eng. 2014, 34, 431–437. [Google Scholar]
- Bai, C.; Yin, Z.; Liu, J.; Zhang, Y.; Sun, X. Integrated Sliding Mode Velocity Control of Linear Permanent Magnet Synchronous Motor with Thrust Ripple Compensation. CES Trans. Electr. Mach. Syst. 2023, 7, 100–109. [Google Scholar] [CrossRef]
- Wang, C.; Li, W.; Wang, Y.; Meng, Z.; Yang, L. DC bus voltage fluctuation classification and restraint methods review for DC microgrid. Proc. CSEE 2017, 37, 84–98. [Google Scholar]
- Tsikalakidroop, H. Centralized Contml for Optimizing Microgrids Operation. IEEE Trans. Energy Convers. 2008, 23, 1–8. [Google Scholar]
- Zhang, G.; Ding, X.; Peng, B.; Xie, R.S.; Bi, K.J. Improved control strategy for an AC/DC hybrid microgrid interlinking converter. Power Syst. Prot. Control 2020, 48, 50–58. [Google Scholar]
- Yang, J.; Jin, X.; Wu, X.; Jiang, C. An improved load current sharing control method in DC microgrids. Proc. CSEE 2016, 36, 59–67. [Google Scholar]
- Lu, X.; Guerrero, J.M.; Sun, K.; Vasquez, J.C. An improved droop control method for DC microgrids based on low band width communication with DC bus voltage restoration and enhanced current sharing accuracy. IEEE Trans. Power Electron. 2013, 29, 1800–1812. [Google Scholar] [CrossRef]
- Wang, P.; Lu, X.; Yang, X.; Wang, W.; Xu, D. An improved distributed secondary control method for DC microgrids with enhanced dynamic current sharing performance. IEEE Trans. Power Electron. 2016, 31, 6658–6673. [Google Scholar] [CrossRef]
- Liu, Z.; Miao, S.; Fan, Z.; Kong, Y. Accurate power allocation and zerosteady-state error voltage control of the islanding DC microgird based on adaptive droop characteristics. Trans. China Electrotech. Soc. 2019, 34, 795–806. [Google Scholar]
- Khorsandi, A.; Ashourloo, M.; Mokhtari, H.; Iravani, R. Automatic droop control for a low voltage DC microgrid. IET Gener. Transm. Distrib. 2015, 10, 41–47. [Google Scholar] [CrossRef]
- Tah, A.; Das, D. An enhanced droop control method for accurate load sharing and voltage improvement of isolated and interconnected DC microgrids. IEEE Trans. Sustain. Energy 2016, 7, 1194–1204. [Google Scholar] [CrossRef]
- Kan, C.Z.; Chen, Y.F.; Li, P.C.; Zhang, C.J. Research on current load dynamic allocation method for distributed energy storage system. Power Electron. Technol. 2016, 50, 113–117. [Google Scholar]
- Yang, J.; Jin, X.; Wu, X.; Acuna, P.; Aguilera, R.P.; Morstyn, T.; Agelidis, V.G. Decentralized control method for DC microgrids with improved current sharing accuracy. IET Gener. Transm. Distrib. 2017, 11, 696–706. [Google Scholar] [CrossRef]
- Zhang, W.F.; Zhang, J.B.; Li, C.S. Semi-physical simulation study of grid-connected control of photovoltaic power generation system based on StarSim. Electr. Switchg. 2021, 59, 66–68. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | References | Advantages | Disadvantages |
|---|---|---|---|
| SMC | [2] | Simplified the design of the second-order sliding mode controller. | Reduced the system’s anti-interference ability and robustness. |
| [3] | Shortened the sliding mode arrival time and improved the dynamic performance. | Chattering problems. | |
| [4] | Enhanced the system’s robustness. | Increased control difficulty; the high-frequency chattering phenomenon could not be solved completely. | |
| [5,6,7,8] | Further improved control strategies. | Failed to achieve complete suppression and increased the control complexity. | |
| [9,10,11,12] | Proposed a new sliding mode reaching law. | Output voltage ripple increased and the chattering problem persisted as before. | |
| Droop control | [13,14,15] | The control method was simplified without considering the impact of line impedance. | Led to unreasonable power allocation and common bus voltage deviation. |
| [16] | Reduced the voltage deviation. | Power allocation accuracy was bad. | |
| [17,18] | Improved the power allocation accuracy. | The common bus voltage deviation was not reduced. | |
| [19] | Collected the common bus voltage directly. | The transmission pressure increased. | |
| [20,21,22] | Weakened the influence of line impedance on power allocation. | Power allocation accuracy was still bad. |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 20–1000 | 150 | ||
| 1.5 | 0.1–5 | ||
| 1 | 0.1–5 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 500 | 700 | ||
| 1.5 | 0.6 | ||
| 2.5 | 3.0 | ||
| 0.5 | 0.8 | ||
| 1.2 | 0.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Ji, J.; Dong, H.; He, M.; Hu, S. Power Allocation Control Strategy of DC/DC Converters Based on Sliding Mode Control. Energies 2024, 17, 4628. https://doi.org/10.3390/en17184628
Li W, Ji J, Dong H, He M, Hu S. Power Allocation Control Strategy of DC/DC Converters Based on Sliding Mode Control. Energies. 2024; 17(18):4628. https://doi.org/10.3390/en17184628
Chicago/Turabian StyleLi, Wenwen, Jianwei Ji, Henan Dong, Miao He, and Shubo Hu. 2024. "Power Allocation Control Strategy of DC/DC Converters Based on Sliding Mode Control" Energies 17, no. 18: 4628. https://doi.org/10.3390/en17184628