1. Introduction
In recent years, the exploitation and utilization of the ocean have gained increasing strategic significance, with UUVs becoming key equipment. With advancements in related technology, UUVs are now capable of performing various operational tasks such as intelligence reconnaissance, marine environmental surveying, antitorpedo, seabed surveying, and instant communication [
1].
Endurance time and speed are crucial performance indicators for UUV. Most typical light and heavy UUV speeds at home and abroad remain below 6 kn; however, a few can reach 6–12 kn [
2,
3,
4]. Meeting future ocean operation needs while improving mission execution capability and underwater survivability requires enhancing high-speed navigation capabilities beyond 20 kn as well as high-mobility capabilities exceeding 2 m/s
2 through joint development of power systems, drag reduction techniques, propulsion methods, and control mechanism energy supplement technologies along with structural design improvements [
5,
6,
7].
The power system is a fundamental determinant of the speed, endurance, and maneuverability of UUVs. Lithium batteries are extensively utilized in both lightweight and heavyweight UUVs due to their exceptional energy density, broad operating temperature range, and prolonged cycle life [
8]. Currently, the utilization of lithium batteries as power systems for UUVs still encounters numerous challenges. Primarily, hydrostatic pressure significantly impacts the rated capacity of lithium batteries. In recent years, soft package lithium batteries have emerged as a new solution that can withstand high hydrostatic pressure directly, reducing equipment mass for deep navigation UUVs [
9,
10,
11]. On the other hand, variations in temperature also have an impact on the efficacy of lithium batteries. Some studies have proposed a novel battery thermal management scheme that utilizes composite phase change materials to envelop batteries and absorb heat, instead of traditional liquid cooling, in order to mitigate the adverse effects of temperature fluctuations. This approach reduces the number of moving parts and enhances structural compactness [
12,
13,
14]. However, the endurance of UUV during high-speed maneuvers remains significantly diminished due to the substantial increase in resistance. Consequently, underwater drag reduction technology emerges as a pivotal area for enhancing UUV performance.
Current research on underwater drag reduction technologies focuses on micro-structural drag reduction, superhydrophobic surface drag reduction, and supercavitation drag reduction. However, the microstructure drag reduction technology has certain limitations, including low manufacturing precision, poor dynamic adaptability, and insufficient investigation into its drag reduction performance [
15,
16]. Additionally, hydrostatic pressure, chemical substances, and pollutants in water can diminish the lifespan of the air layer on a superhydrophobic surface, thus making it challenging to apply superhydrophobic surface drag reduction in marine environments [
17,
18]. Supercavitation drag reduction technology has been extensively researched due to its notable advantages in achieving high rates of drag reduction and minimal structural requirements for the vehicle. By creating a stable gas phase surrounding the vehicle, the rate of drag reduction can exceed 90% [
19]. Supercavitation can be categorized into natural supercavitation and artificial ventilation supercavitation. The former requires sufficient speed, while exhibiting inadequate stability, and the latter requires an air source that can be utilized for reducing drag on UUVs. The studies of artificially ventilated supercavitation primarily focus on the factors that influence the resistance and other hydrodynamic characteristics of the vehicles. By analyzing the hydrodynamic effects of factors such as blockage effect, hot-gas ventilation, and Froude number, methods for mitigating these influences are proposed, thereby establishing a foundation for enhancing the stability of supercavitation [
20,
21,
22]. The utilization of artificially ventilated supercavitation in lithium battery-powered UUVs is anticipated to significantly mitigate drag, but the installation of the artificial ventilation system will occupy a significant portion of the available space. Consequently, it becomes imperative to explore alternative novel power systems that can cater to the future requirements of UUVs, encompassing high velocity, extended endurance, exceptional maneuverability, and other performance benchmarks.
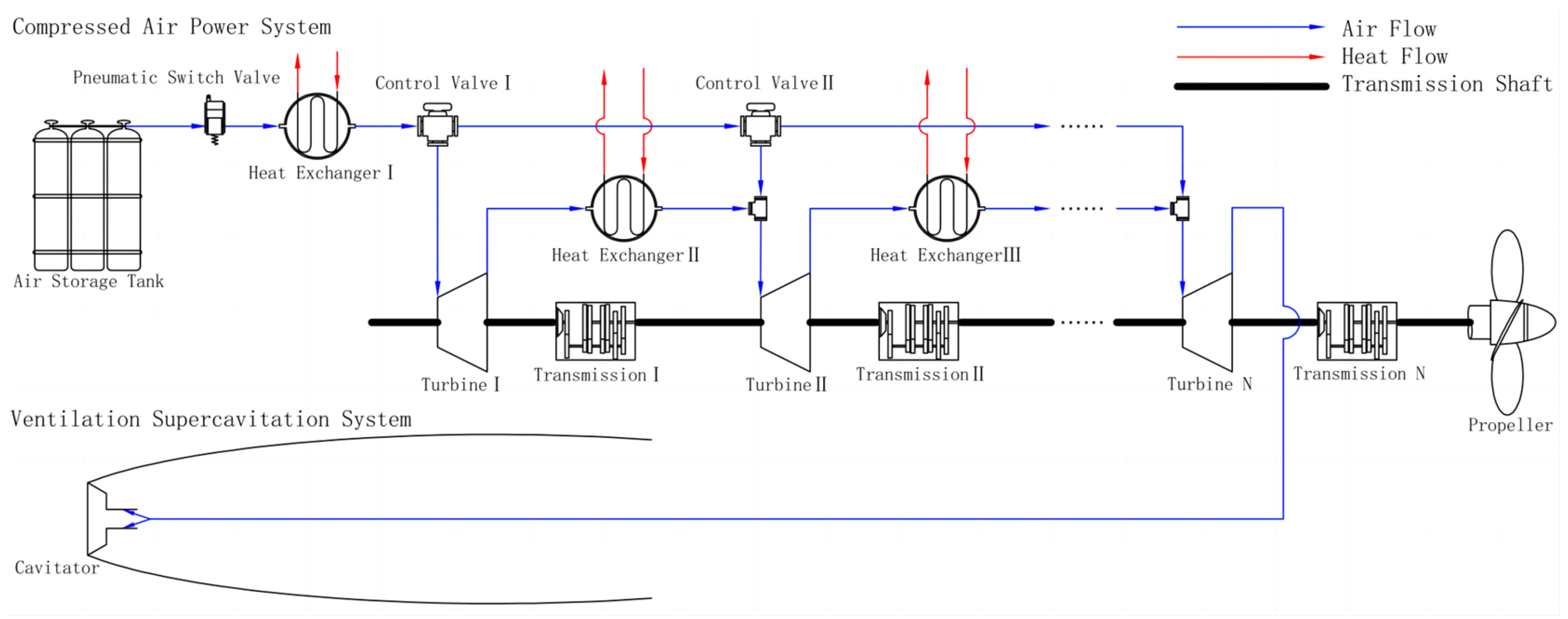
The compressed air power system offers the advantages of rapid charging and enhanced safety, making it a promising solution for vehicles and other equipment [
23,
24,
25]. Consequently, there is a potential to effectively integrate the compressed air power system into UUVs by sharing the air source with the artificially ventilated supercavitation system, thereby reducing space occupancy through their efficient coupling. Its fundamental working principle involves expanding compressed air through expanders to provide power for UUVs, while directing the expanded low-pressure air into the vehicle’s head to generate supercavitation and achieve drag reduction. This holds great promise in enhancing UUV speed, endurance, maneuverability at high speeds, as well as underwater survivability and mission execution. During the operation of a compressed air power system, the continuous decrease in gas storage pressure adversely affects specific shaft power and power performance. Compressed air vehicles typically employ regulating valves to stabilize the working pressure of the expander for adjusting output power and torque. However, this method results in energy storage losses, with losses exceeding 40% when the gas storage pressure reaches 30 MPa [
26]. The stable output of the compressed air energy storage system is achieved through the adjustment of airflow [
27]. To mitigate significant energy loss at higher gas storage pressures, it is more appropriate to adjust the air flow in this study.
From the existing research, there is a scarcity of reports on the compressed air power system generating supercavitation drag reduction for UUVs. Considering its fundamental operational principle, both power and navigation resistance are influenced by air flow and velocity. Therefore, it is imperative to elucidate the coupling characteristics between its power system and drag reduction system, while determining the impact of this novel power and drag reduction system on speed, endurance, and maneuverability at high speeds.
The present study constructs a theoretical model for UUVs based on a compressed air system capable of generating supercavitation. The feasibility of utilizing the compressed air system as the power source is verified through theoretical model solving and simulation methods, while also analyzing the key factors influencing its primary performance. Furthermore, a comparison is made between the main performance of this UUV and that driven by a lithium battery. This research aims to provide novel insights for developing UUVs with enhanced speed, extended endurance, and improved high-speed maneuverability. Compared to existing UUVs, the proposed system exhibits promising application prospects. It addresses the limitations of fuel-based UUVs, such as incomplete combustion, high costs, and the need for oxidant transportation [
28]. Furthermore, it overcomes drawbacks associated with natural energy sources like wind, solar, and tidal energy in UUVs by offering enhanced efficiency and eliminating the requirement for regular surfacing [
29]. Additionally, when compared to widely used lithium battery-powered UUVs, it reduces navigation resistance while improving high-speed maneuverability and ensuring system compactness.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}