
Research on the Intelligent System Architecture and Control Strategy of Mining Robot Crowds


Abstract
1. Introduction
- (1)
- Each single robot is relatively independent. There are many types of robots, and the data communication interface and protocol are not unified.
- (2)
- There is a lack of interaction regarding information between the surrounding environment and personnel, meaning there is no data fusion or analysis.
- (3)
- The robot’s operation is isolated, and the robot is not included in the coal mine safety production management system. The cooperative operation ability between homogeneous and heterogeneous robots lack a unified scheduling and management, and the overall operation efficiency is low [3].
2. Current Situation of Intelligent Mining Robots in China and Abroad
2.1. Current Status of Foreign Coal Mine Robot Technology
- (1)
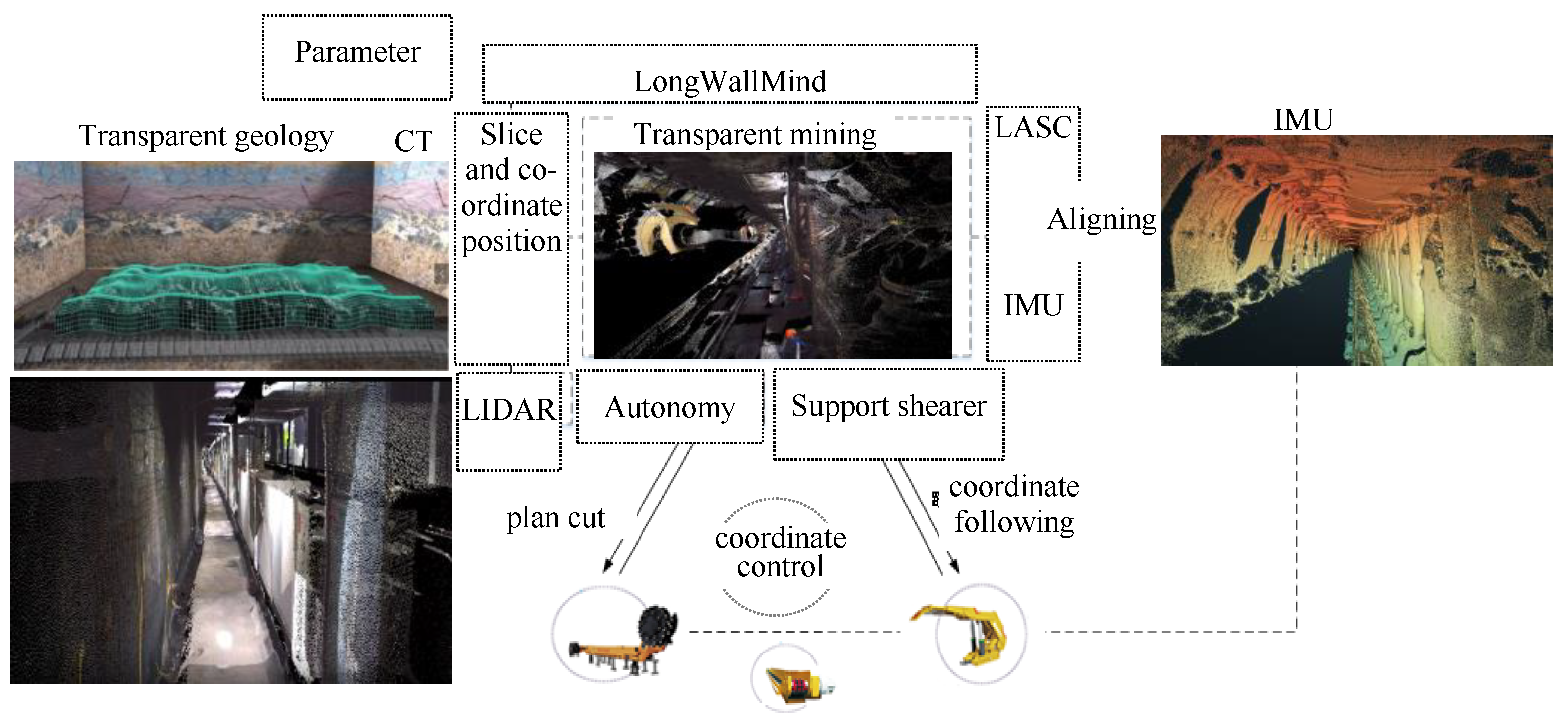
- ACARP (The Australian Coal Industry’s Research Program) is a unique and highly successful mining research program that has been running in Australia since it was established in 1992. The project was undertaken by CSIRO (Sydney, Australia) Exploration & Mining and the Cooperative Research Centre for Mining Equipment and Technology CMTE and had the support of the major longwall equipment manufacturers. It is 100% owned and funded by all Australian black coal producers through a five cents per ton levy paid on saleable coal. Most development operations in Australia utilize manual line-of-sight, radio-controlled miners to cut roadways, and operator-driven shuttle cars to transfer coal from the working face. These levels of technology are not able to achieve the goal of the safe remote operation of roadway development. Two issues have been identified that inhibit progress in the domain of remote development: ① Continuous miner self-steering technology to maintain desired roadway headings has not yet reached the required level of performance required for sustained remote operation. ② No automated options currently exist to guide shuttle cars while tramming through roadway systems and whilst avoiding ribs, cut-through corners, and other infrastructure. A system based on CSIRO’s ExScan technology along with SLAM techniques has been developed to address these issues. A bracket that mounts two ExScans on the shuttle car operator cab has been designed so that the ExScans provide both forward and reverse views along with the distance to the ribs during operation. The bracket is currently being fabricated. The system electronics have also been operated for several days inside an enclosure to ensure the system does not overheat when running in production conditions, which was successful. Once the mounting bracket and components have been fabricated, the system will be assembled and tested at CSIRO to confirm the ExScan mounting configuration is stable. Once that is deemed suitable, the system will be transported to the host site for installation on a shuttle car so that a production trial can be conducted with UPEE approval.
- (2)
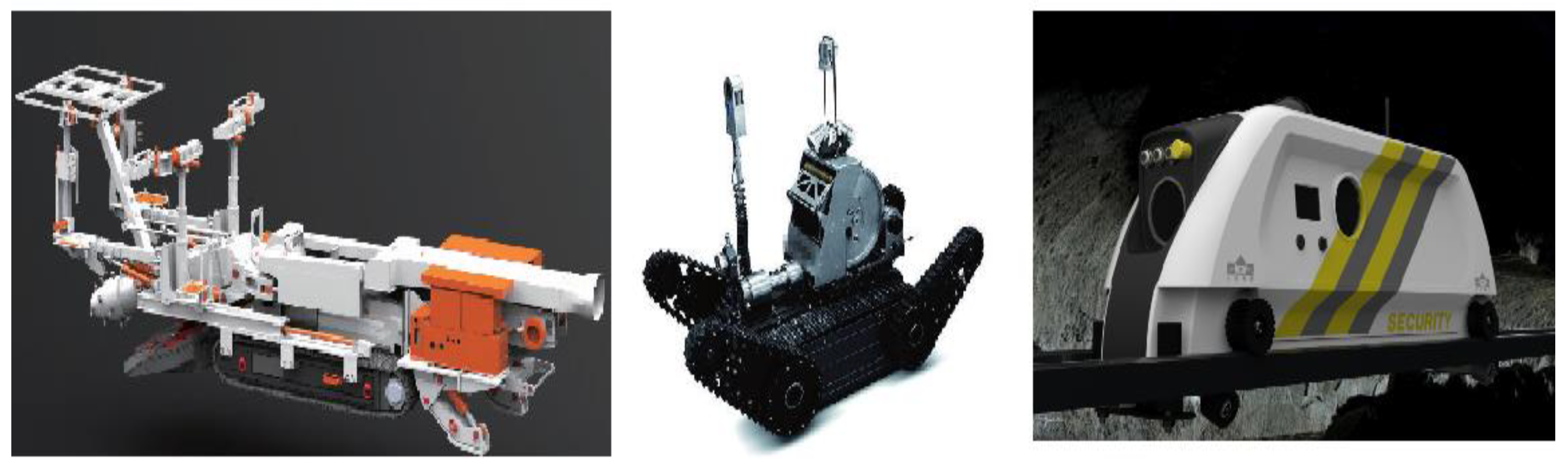
- The White Oak Coal Mine(Illinois Basin, US) has developed a planned shearer, significantly improving the work efficiency and programmable operation capabilities. The coal mining robot adopts a wheeled walking and robotic arm mining method, which can complete the entire coal mining process [6], as shown in Figure 5. The robot also has the functions of autonomous control and navigation; it can independently plan coal mining routes based on the situation of the mine and improve coal mining efficiency.
- (3)
- German coal mining robot: The German Bosch company(Stuttgart, Germany) developed a coal mining robot that uses wheeled walking and mechanical arm mining and can complete the entire mining process. The robot also has the functions of autonomous control and autonomous navigation and can independently plan the coal mining route according to the situation of the mine to improve the mining efficiency. In addition, the robot uses advanced sensing technologies such as LIDAR and infrared cameras to measure and detect the internal environment of the mine with high precision [7].
- (4)
- Japanese coal mining robot: The Robotics Institute of the University of Tokyo(Tokyo, Japanese) in Japan developed a coal mining robot that adopts the methods of caterpillar walking and mechanical arm mining and can complete the entire coal mining process. The robot also has the functions of autonomous control and navigation, and can independently plan the coal mining route according to the situation of the mine to improve efficiency [8]. In addition, the robot uses ultrasonic sensing technology, which can measure and detect the internal environment of the mine with high precision.
2.2. Current Status of China’s Domestic Coal Mine Robot Technology
- (1)
- China University of Mining and Technology (Xuzhou, China): A group of robotized coal mining machines was developed, among which a robotized shearer controls the coal mining drum speed, traction speed, and adaptive height. Robotized shield support can help regulate the shield support force, posture, roof support group arrangement, etc. [9]. Robotized transportation can control the speed of the scraper conveyor, the tension of the scraper chain, and the straightness. Robotized transportation integrates intelligent transfer machines, intelligent crushers, and intelligent belt conveyors for control.
- (2)
- Shandong University(Jinan, China): A coal mining robot was developed that uses wheeled walking and hydraulic drive to complete the entire coal mining process. The robot also has the functions of autonomous control and navigation; it can independently plan coal mining routes based on the situation of the mine and improve coal mining efficiency [10].
- (3)
- Beijing University of Science and Technology(Beijing, China): A coal mining robot was developed that adopts the methods of wheeled walking and mechanical arm coal mining and can complete the entire coal mining process. The robot also has the functions of autonomous control and navigation; it can independently plan coal mining routes based on the situation of the mine and improve coal mining efficiency.
- (4)
- Henan University of Science and Technology(Jiaozuo, China): A coal mining robot was developed that uses track walking and hydraulic drive to complete the entire coal mining process. The robot also has the functions of autonomous control and navigation; it can independently plan coal mining routes based on the situation of the mine and improve coal mining efficiency.
- (5)
- China Coal Science and Technology Group(Beijing China): The research and development of two sub-projects of the National Key Research and Development Plan project “Research and Development of Intelligent Mining Safety Technology and Equipment in Coal Mines”, namely, the “Intelligent Mining Control Technology and Equipment” the and “Unmanned Working Face Inspection Robot”, were implemented [11], as shown in Figure 6. We conducted industrial experiments on coal mining inspection robots at Shaanxi Huangling Mining Company (Yan’an, China) and undertook the development of inspection robots in Project 6 of the National Key Research and Development Plan. To achieve the production goal of intelligent working faces from “unmanned operation and manned inspection” to “unmanned operation and unmanned inspection”, the Tianma Company (Beijing, China) proposed a plan to use automatic inspection robots on working faces to replace inspection personnel and proposed mining equipment suitable for long, narrow underground mining spaces and dangerous and harsh working environments [12].
3. Construction of Mining Robot Crowds
3.1. Layer Levels of Mining Robots
- (1)
- Method for target position recognition in complex application scenarios within coal mines: A multi-dimensional information-splicing algorithm based on multi-visual sensors was developed specifically for tunneling scenarios in coal mines. This algorithm enables the automatic differentiation of position information regarding target objects through external parameter calculations that facilitate multi-dimensional information splicing and fusion using RGB images and point clouds. This approach establishes a multi-dimensional feature space to describe the global features of targets, while identifying key points based on the projection mapping relationship, and realizes the accurate operation of the robot.
- (2)
- Standardized access technology for coal mine robots: In order to ensure the standardization of the data access of the robot and the objectification of the data model, the unified robot communication protocol and middleware based on OPC UA were used for development. The data standardization process of the coal mine robot is shown in Figure 7. OPC UA uses service-oriented architecture to realize the data exchange. Based on the TCP/IP protocol, the three-handshake principle is adopted to send messages through the communication stack to ensure the reliability of the data transmission [14]. When OPC UA is applied to the information interaction of the coal mine robot, on the one hand, the mining robot swarm and auxiliary robot swarm that have already transmitted data through the OPC are upgraded and the objectified information model is constructed to form a rapidly expanding object that includes the basic information, attitude information, and control information of the robot; on the other hand, a protocol-adaptive conversion is realized by building the protocol middleware.
- (3)
- Robot job scheduling strategy: In order to respond to emergencies and complete normal inspection tasks within the region at the same time, the same kind of job scheduling strategy is proposed. Grid management is adopted to divide the application scenarios of similar robots into several regions, and the robots are assigned according to these regions to ensure a normal inspection in each scenario. The grid management is subject to the scheduling time, which is the main indicator used to measure the speed of a robot’s response. Under the limited robot resource configuration, reasonable deployment can ensure the shortest response time of the robots in the region. In the daily scheduling command, although the independent scheduling of a single robot and the coverage scheduling of similar robots are two different types of resource deployment methods, they are often combined with each other in practical applications. First, the task is assigned to the key emergency scenarios, and then the deployment of regional mobile inspection operations is carried out.
- (4)
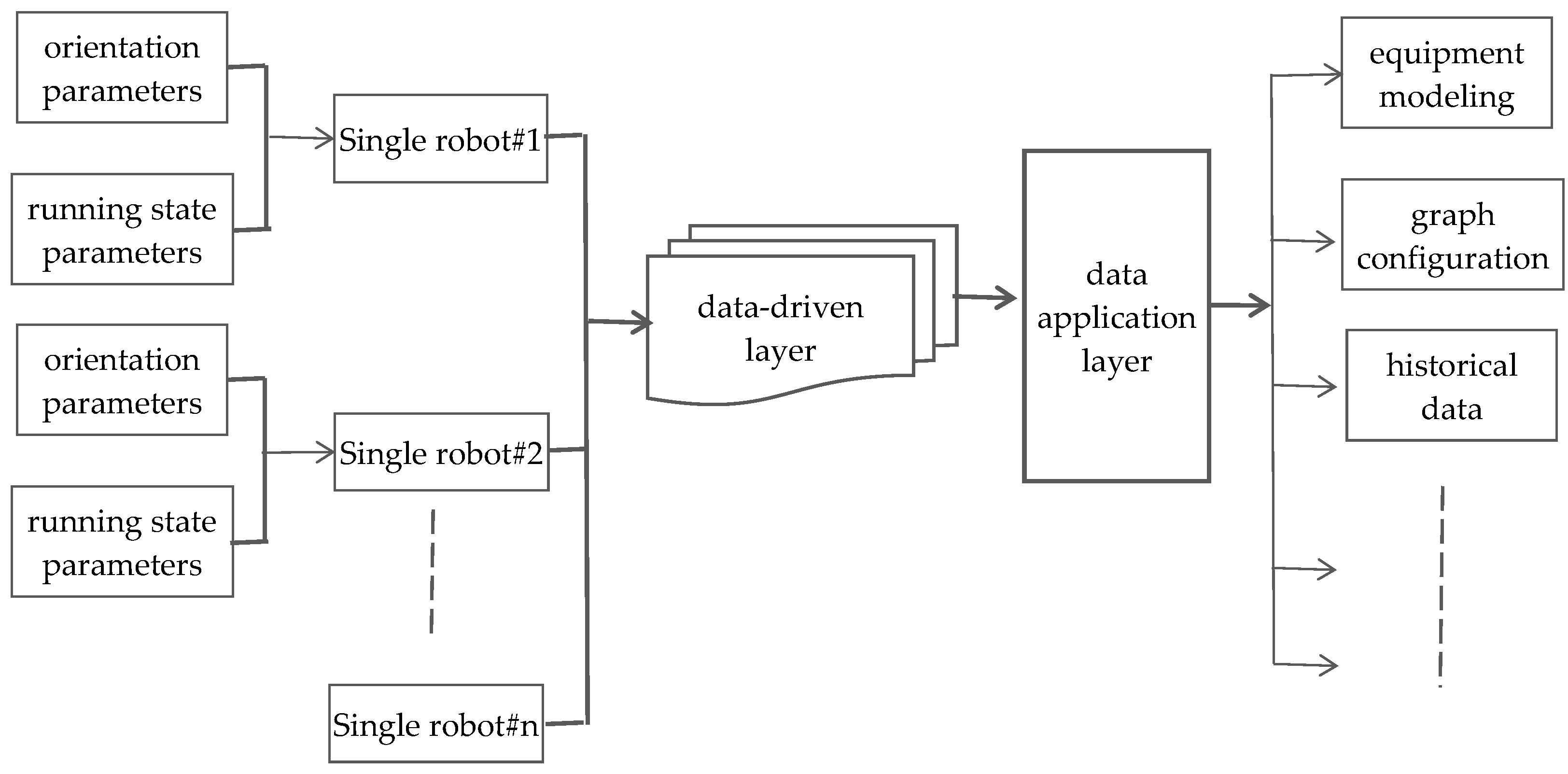
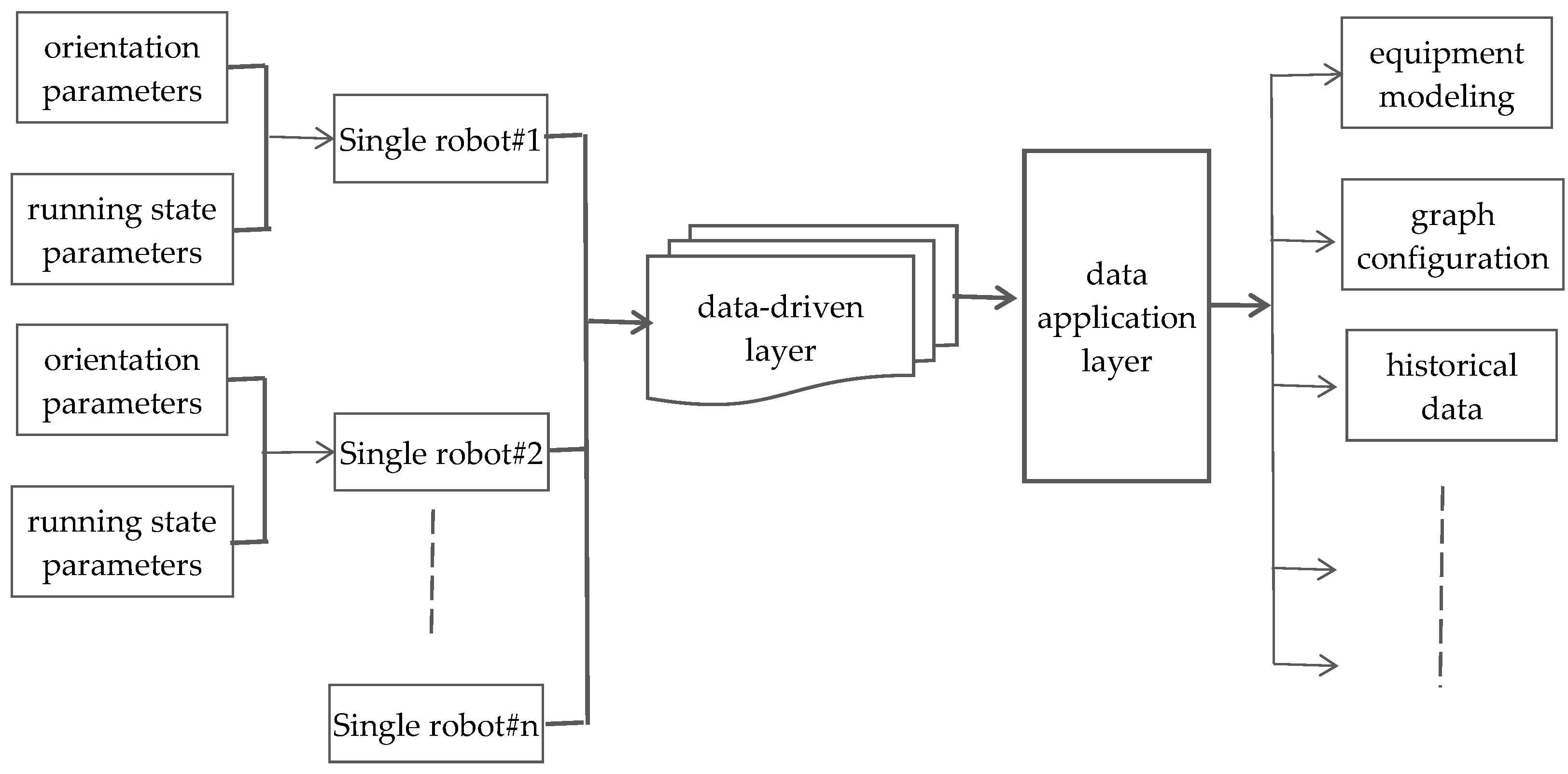
- Robot crowds management and collaborative scheduling platform: This scheduling platform is divided into a robot swarm layer, a communication access layer, an application service layer, a data release layer, and a data interaction layer at the technical architecture level.
3.2. Mining Robot
- (1)
- The operation and control accuracy of robots needs to be continuously improved to meet the needs of coal mining. The autonomy and intelligence of the robots also need to be continuously improved to meet the operational requirements in complex environments [20]. Specifically, these improvements can be achieved by improving the robot’s sensors, control systems, and computing capabilities [21]. For example, the use of high-precision inertial navigation systems, multi-sensor fusion technology, and high-performance computing platforms enables robots to perceive and control their motion and posture more accurately.
- (2)
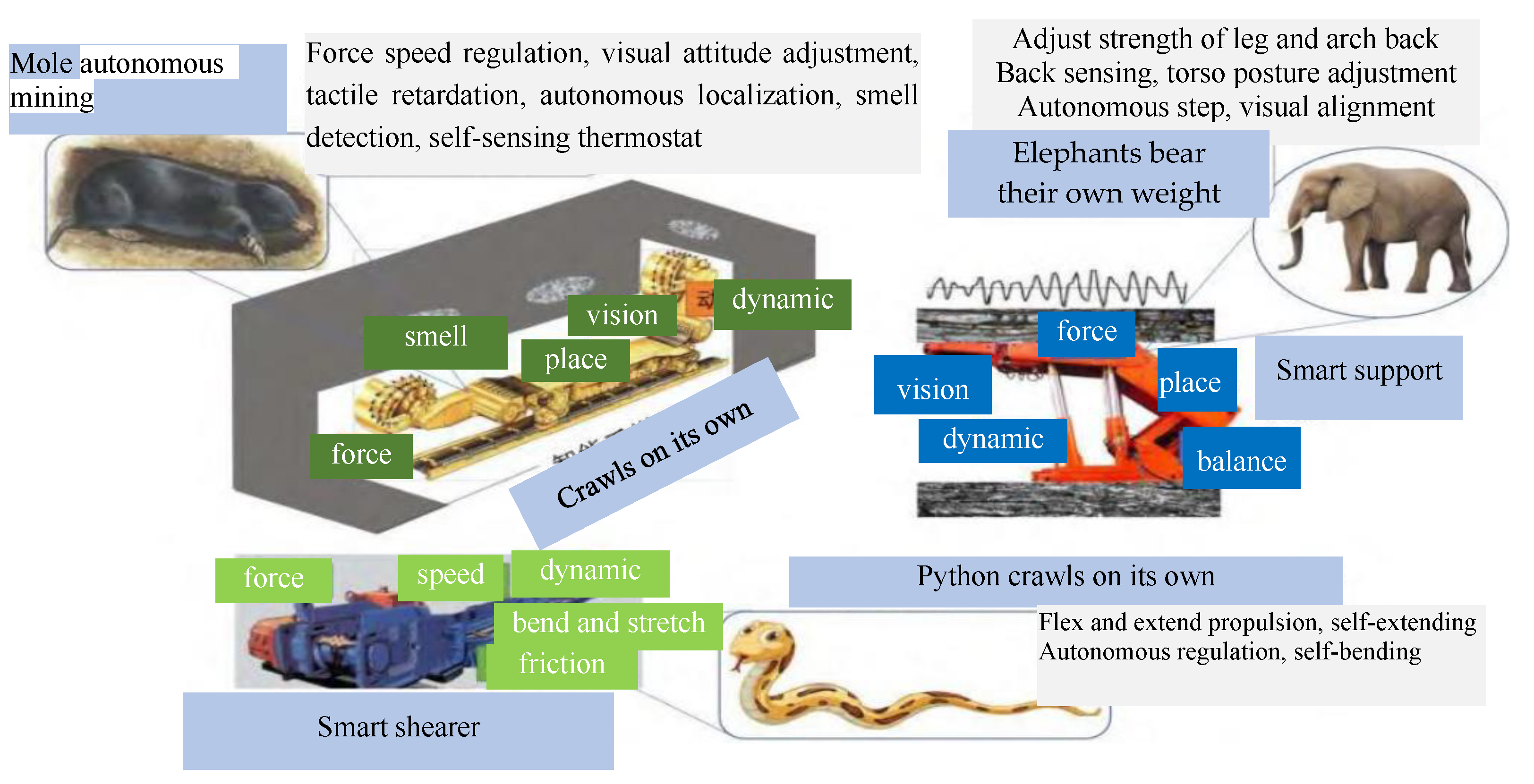
- An intelligent coal mining robot crowd control system based on the integration of production, safety, and environmental protection information throughout the entire process should be developed. Moreover, a hierarchical scheduling planning strategy and process knowledge graph for coal mining machine populations should be constructed; human–machine collaboration, cloud–edge collaboration, and robot–group collaboration should be achieved; and an intelligent coal mining robot group control mode should be created that integrates the horizontal business collaboration and vertical processes, forming a crowd effect [21]. Robotization refers to endowing traditional machinery with robot functions, providing it with semi-autonomous or autonomous operation capabilities in specific environments [22]. Traditional machinery can be replaced with robots to complete production tasks such as mining, transportation, and selection; an adaptive flexible production process can be formed through autonomous collaboration among robot groups; and a highly productive, reliable, and safe robotic mining system can be constructed.
- (3)
- The robotized mining system embodies the characteristics of “integration of networking, intelligence, and robotization” [23]. Networking helps robotization to “go hand in hand”, and intelligence empowers robotization, much like “adding wings to a tiger”, greatly improving the level of mining autonomy and achieving the goals of robotization.
3.3. Roof Support Robot
3.4. Transportation Robot
3.5. Collaborative Management and Control of Robot Crowd Operations
- Heterogeneous robot operation collaboration in key operation scenarios
- b.
- Similar robot cooperation in auxiliary operation scenarios
4. Coal Mining Robot Crowd 5G Technology Application
4.1. Establishing a Dedicated Network Platform for Coal Mines with 5G
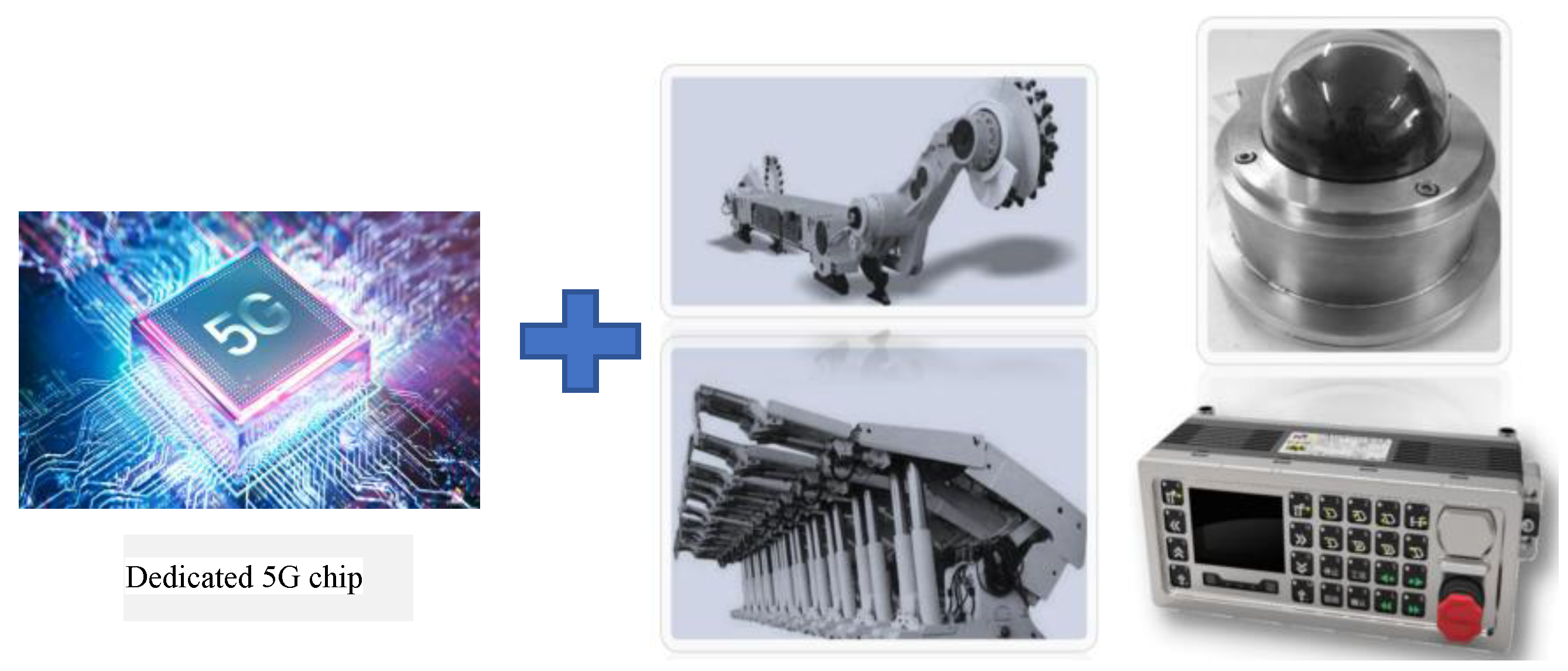
- (1)
- Huawei Technologies Corporation developed a batch of 5G chips, 5G base stations, 5G terminals, and other equipment made suitable for special functions, such as being explosion-proof in coal mines.
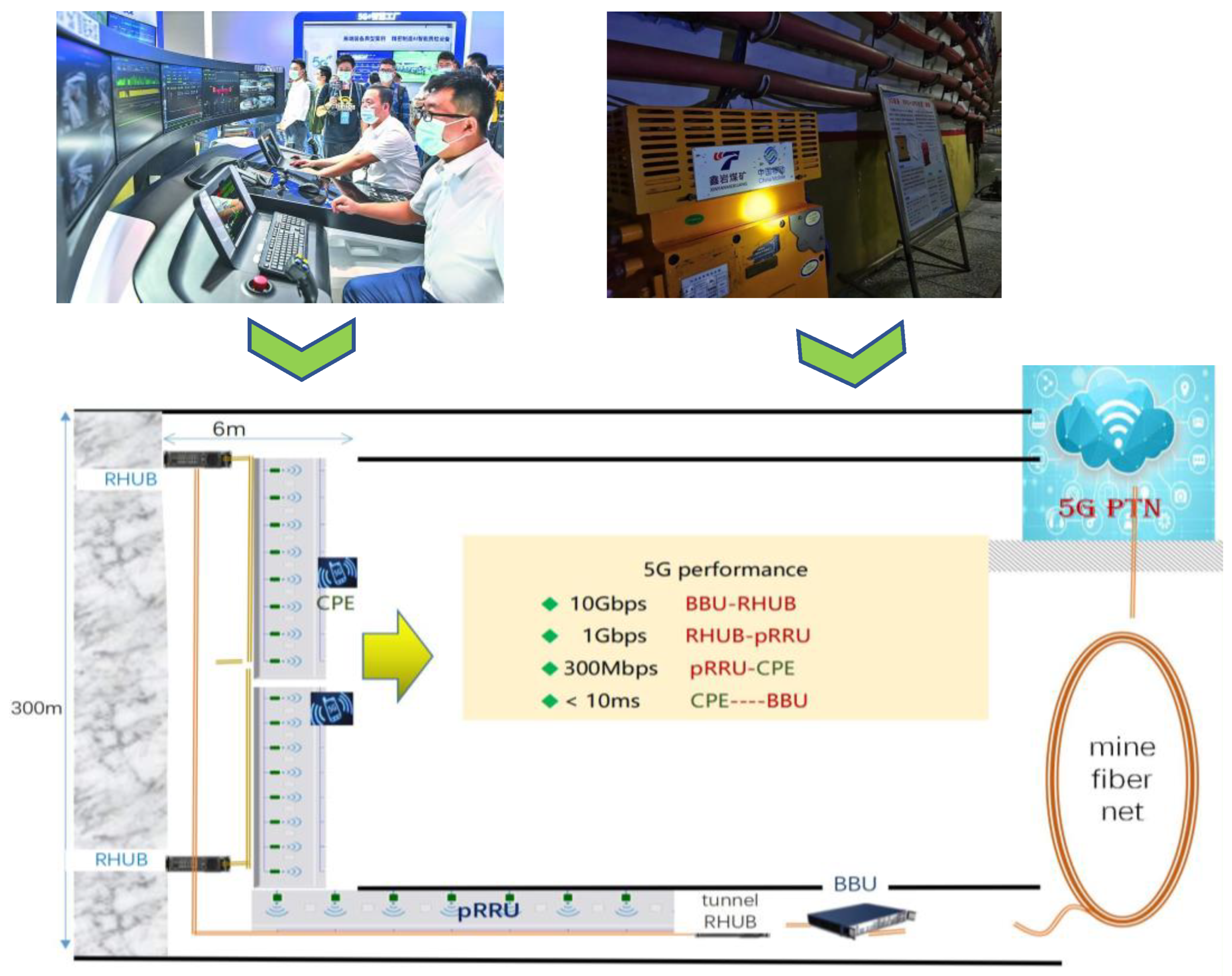
- (2)
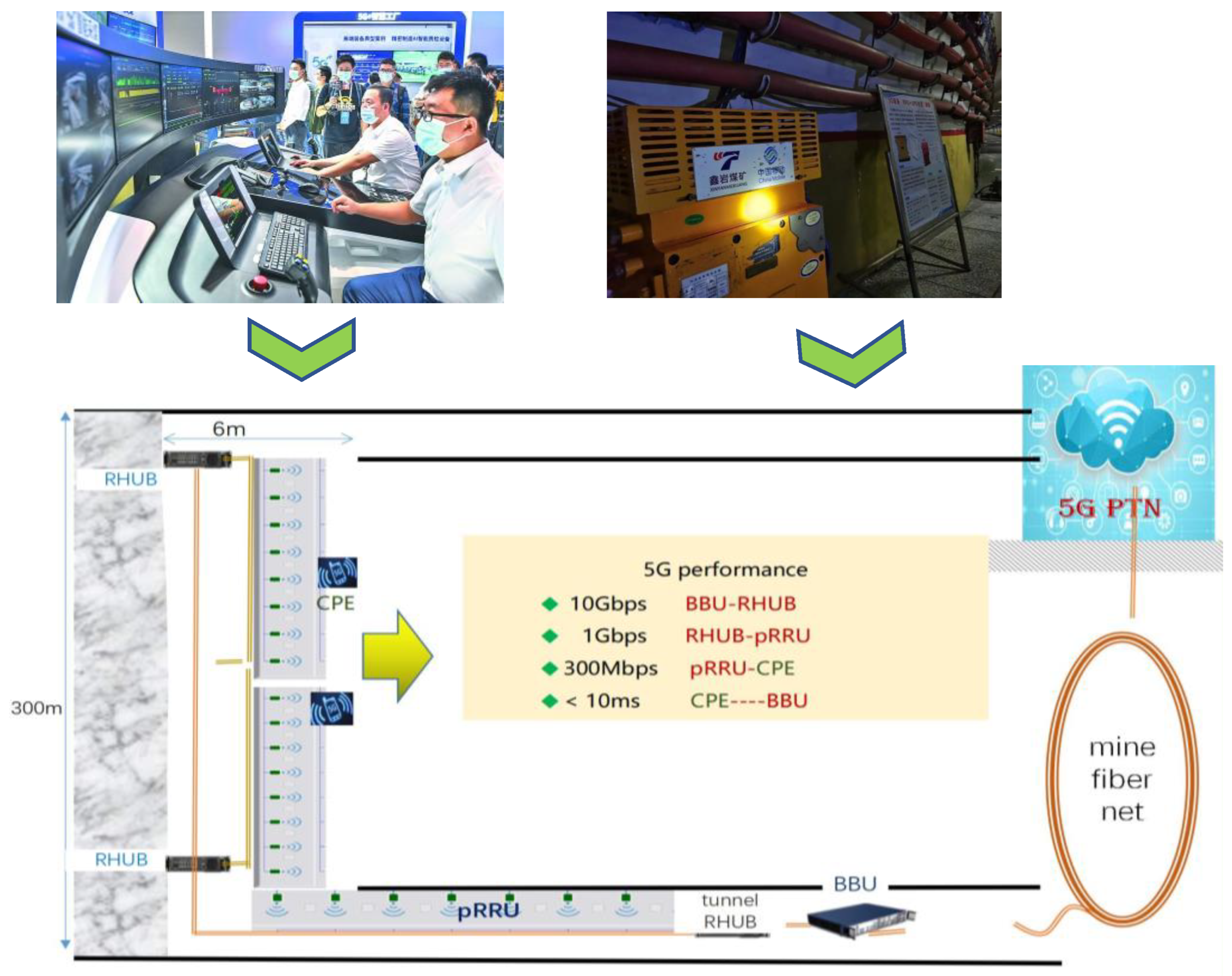
- Relying on the working face gigabit transmission links, we constructed multiple types of data VLAN isolation and control privatization, an integrated 5G wireless communication network, and customized self-organized topology optimization technology under non-line-of-sight and multi path conditions, as shown in Figure 12. The technology supports wide-area and large-capacity mobile terminal access, forming an underground Internet of Things network for coal mines.
4.2. Integrated Mining Intelligent Control System Connected to a Private 5G Network
5. Control Strategy of the Mining Robot
- (1)
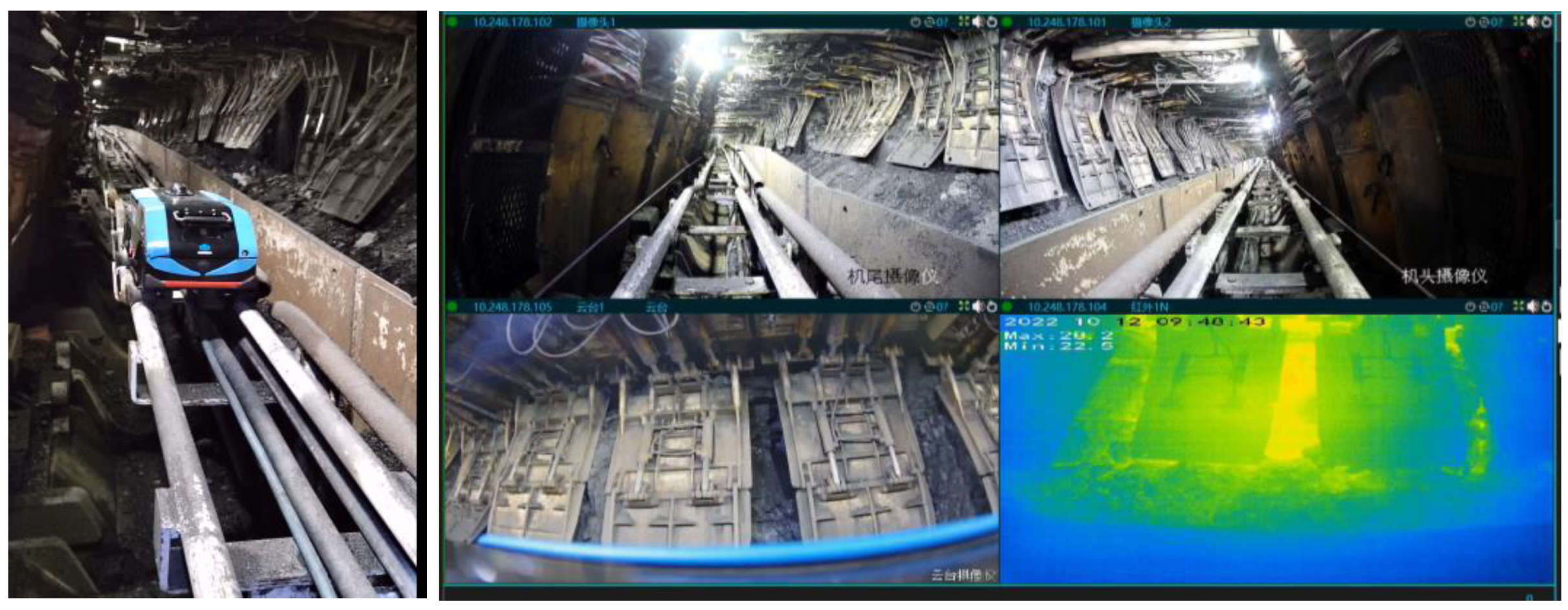
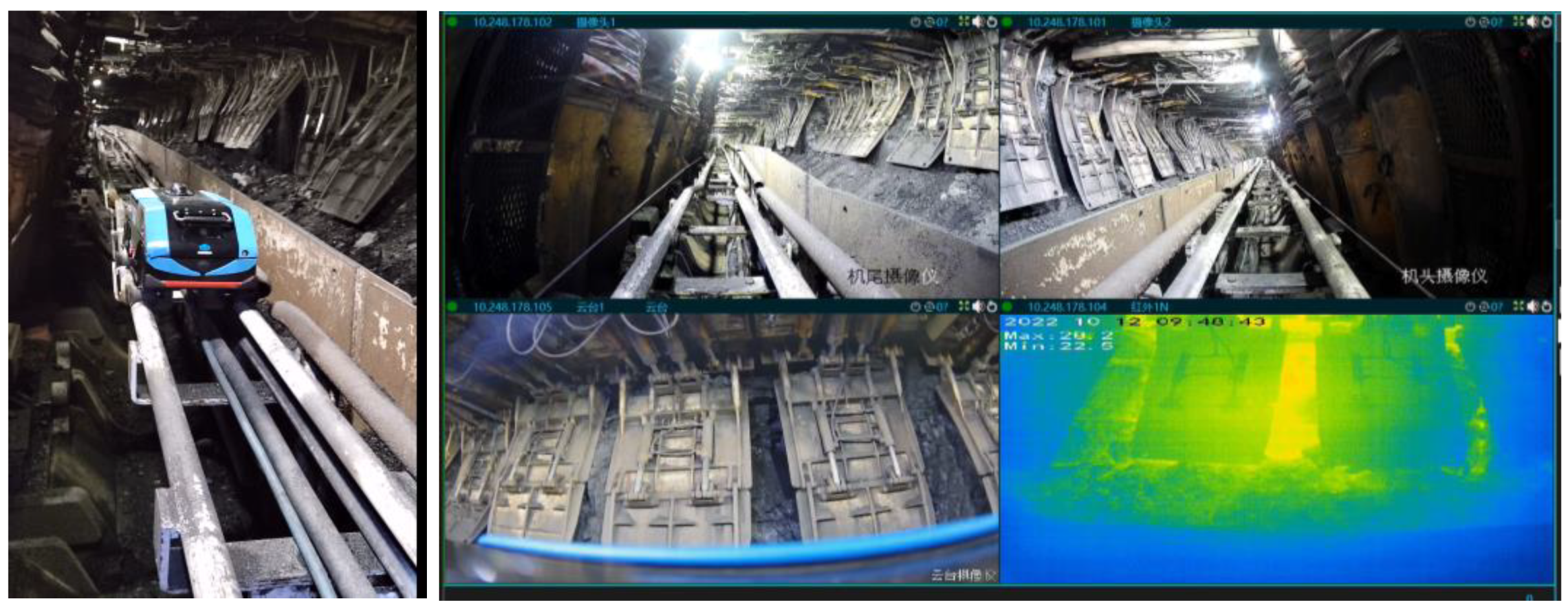
- The mining robots can achieve greater flexibility and efficiency in remote operation and control, real-time monitoring, and autonomous control; and achieve autonomous control in coal mining operations, including autonomous navigation, autonomous obstacle avoidance, and autonomous operation. Real-time monitoring and control have been achieved, where robots monitor and control environmental parameters, such as temperature, humidity, and gas concentration, in real time during the coal mining operations, as shown in Figure 17.
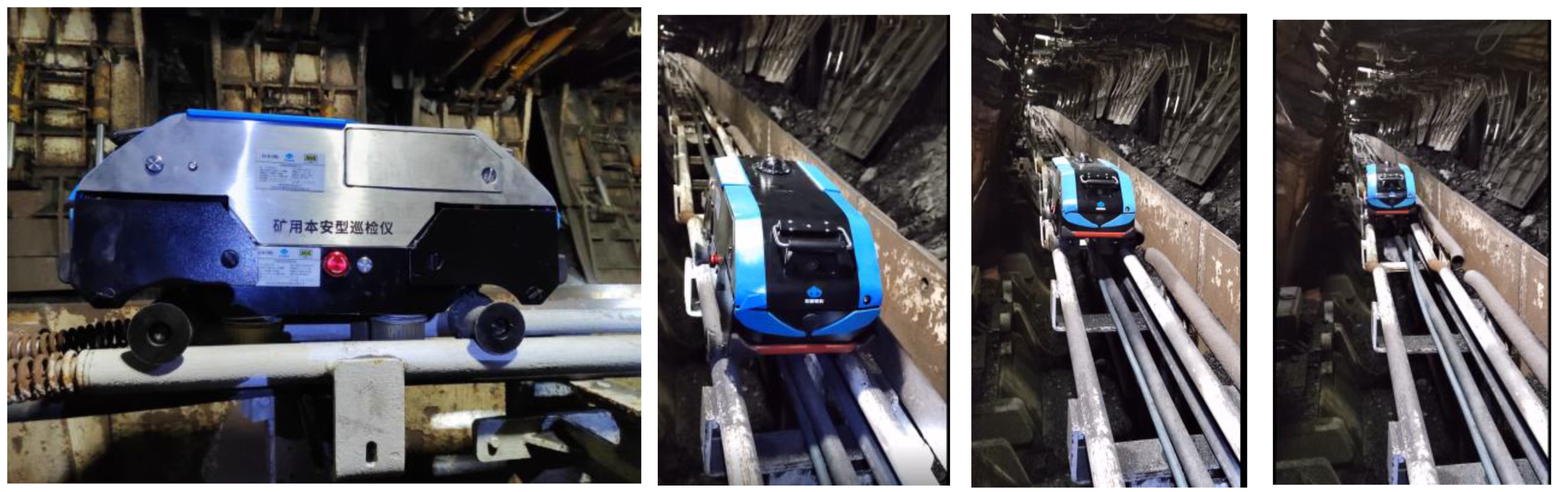
- (2)
- Intelligent inspection: The automation of robot inspection, including automatic inspection, intelligent obstacle avoidance, and fault warning, provides high-speed and stable communication roof support and allows the robot to provide real-time feedback data from various items of equipment and sensors inside the coal mine to the control center for analysis and processing, as shown in Figure 18.
- (3)
- Remote control and command: A network using 5G technology has a fast transmission speed and low latency, enabling the remote control of robots, making coal mining more intelligent and automated, realizing more precise and faster remote commands, and communicating directly with on-site personnel through 5G technology to improve emergency response capabilities in emergency situations.
- (4)
- Real-time monitoring and feedback and autonomous path planning: Robots can cooperate with 5G networks to establish digital maps, achieve autonomous path planning and navigation, and improve transportation efficiency and accuracy.
- (5)
- Data sharing: 5G technology can achieve data sharing among multiple robots, allowing different robots to collaborate and jointly complete coal mining tasks. The low-latency communication capability and the high reliability of 5G networks enable robots to perceive and control their movements and postures more accurately, improving job accuracy and safety.
- (6)
- Internet of Things application: In fully mechanized mining faces, various devices can be connected through 5G technology to form the Internet of Things. In this way, the centralized management and monitoring of the entire fully mechanized mining face can be achieved.
- (7)
- Virtual reality technology: VR technology can provide miners with more realistic training and operating experience. The use of 5G technology can ensure the smoothness and stability of virtual reality images and improve training and operational effectiveness.
- (8)
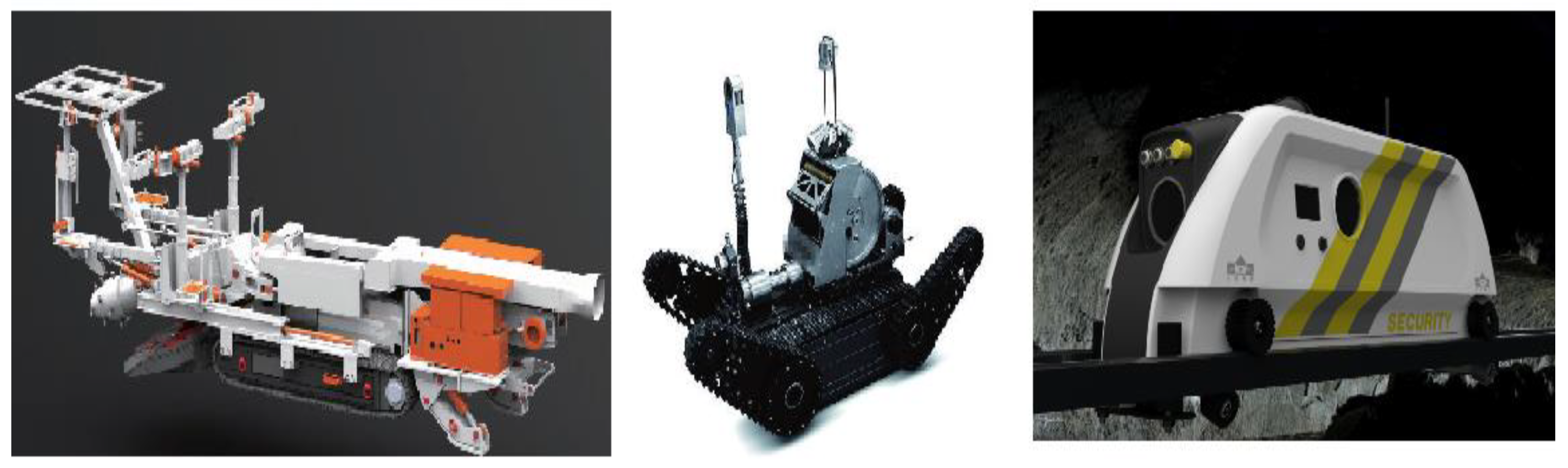
- Operation robots: Robots for special scenarios such as roof fall handling, advanced roof support, and safety detection are important auxiliary means for achieving intelligent mining.
6. Practice Case
6.1. Successful Cases of Intelligent Mining Engineering Practice in China
- (1)
- The HongFa Mine in YunNan: Intelligent mining at a height of 2.8 m has achieved an automation rate of 76% under complex geological conditions, with an average reduction of 30% (five people) in the number of workers on the working face. By adopting automatic machines following operation, the production efficiency was increased by more than 2%, achieving automatic, safe, and efficient production with fewer manned or even unmanned machines following operations and fewer people on duty, effectively promoting the construction of intelligent mines.
- (2)
- Face 11203 of the RuiFeng Mine: After being debugged and put into use in March 2020, the overall system was stable, with a low failure rate and normalized operations. Manual operation is not allowed in areas where conditions permit.
- (3)
- Face 2209 (medium–thick coal seam) of the ZiKuang YangJiaCun Coal Mine in ZiKuang: The average mining height is 2.3 m, and the working face length is 300 m. The automated cutting of triangular coal was realized, with an automation utilization rate of 70%. Usage effect: By using one centralized controller on the ground, the entire production system of the working face can be remotely controlled, reducing the number of people by more than 60% compared to the traditional fully mechanized working face of 12 in the past.
- (4)
- DongTan Mine 63-06 working face (large mining height): As shown in Figure 19, the mining height is 5.7 m, and the inclined length of the working face is 265 m, achieving the normalized application of intelligent roof support following the operation. Usage effect: Each shift requires only eight operators, including one scaffolding worker, one three-machine driver, two end workers, and one shift leader, reducing the number of people by 50%. Bench marking project: The implementation of large-scale mining and normalized operations in the central and eastern regions has played a good demonstrative role.
- (5)
- Working face 4104 of the YiTai BaoShan Mine (thin coal seam): The mining height is 1.2–1.4 m, the minimum mining height is 1.25 m, and the inclined length of the working face is 240 m. Implementation situation: The intelligent operation of the working face equipment is normal, with a roof support and machine usage rate of up to 96.9%; an average daily coal cutting of 12 knives; and a daily production of 4500 tons. Application effect: The number of operators on the working face was reduced from 10–12 to 5–6, a reduction of more than 60%.
- (6)
- WangJiaLing Mine 12309 face (top coal caving): As shown in Figure 20, four automatic coal caving technologies were officially produced on August 23, 2019, and successfully implemented. The concept of “pre-release detection, identification during release, and post-release monitoring” was developed. Application effect: Since the operation of the working face was normalized, the number of personnel in the first team of the WangJiaLing Mine has reduced from 100 to 75, a decrease of 24.8%. The project successfully passed the acceptance of the intelligent mining technology research project for top coal caving on 9 July 2020.
- (7)
- Working face 8202 of the TongXin Mine (top coal caving): The strike length is 2184.5 m, the inclined length is 200 m, the mining height is 3.9 m, the mining and drainage ratio is 1:2.91, and the coal seam dip angle is 1–2°. The normalization of the full face machine was achieved following automation and one-click start/stop, the number of personnel was reduced, the efficiency increased, and the production efficiency increased by 10%.
- (8)
- The 220704 working face of the NingMei ZaoQuan Coal Mine (with complex geological conditions): The basic situation is that the length of the working face is 284.6 m and the average mining height is 3.85 m. The problem of controlling the upward and downward movements of the inclined working face equipment was solved, and an upward bottom-sweeping knife and a downward top-cutting knife were used with high-definition video. Application effect: A maximum of 13 coal cuts were achieved per day, and only one monitoring operator was placed on the working face.
- (9)
- DaBaoDing Coal Mine (large-angle complex coal seam): The average inclination angle is 26°. This is the first intelligent project in the southwest region with a large inclination angle. The authors achieved linkage between the anti-overturning oil cylinder of the roof support and the anti-slip oil cylinder of the scraper machine, thus achieving the normalization of the machine. Usage effect: The comprehensive mining team has a single shift of production workers, with only three people following the machine for inspection. On 8 April 2021, the “Intelligent System Project for Large-Dip Complex Working Faces” of the Sichuan Coal Group successfully passed the acceptance meeting at the DaBaoDing Mine project of the PanZhiHua Coal Company.
6.2. Details of a Practical Project at the YuJiaLiang Mine 43207 Unmanned Mining Face
- (1)
- The “ground planning mining, stope unmanned operation” unmanned mining new mode will be completely liberated from the low working face, heavy manual labor of the coal workers. Through the implementation of the project, the number of production shift downhole personnel gradually reduced from seven to three, and no one entered the working face during the production operation. This fits the “3 + 2 + X” production mode proposed by Yujialiang Coal Mine; that is, during the production shift, three people enter the well in the fully mechanized mining working face, two people enter the well for safety supervision and tile inspection, and X people enter the well for other supervision tasks.
- (2)
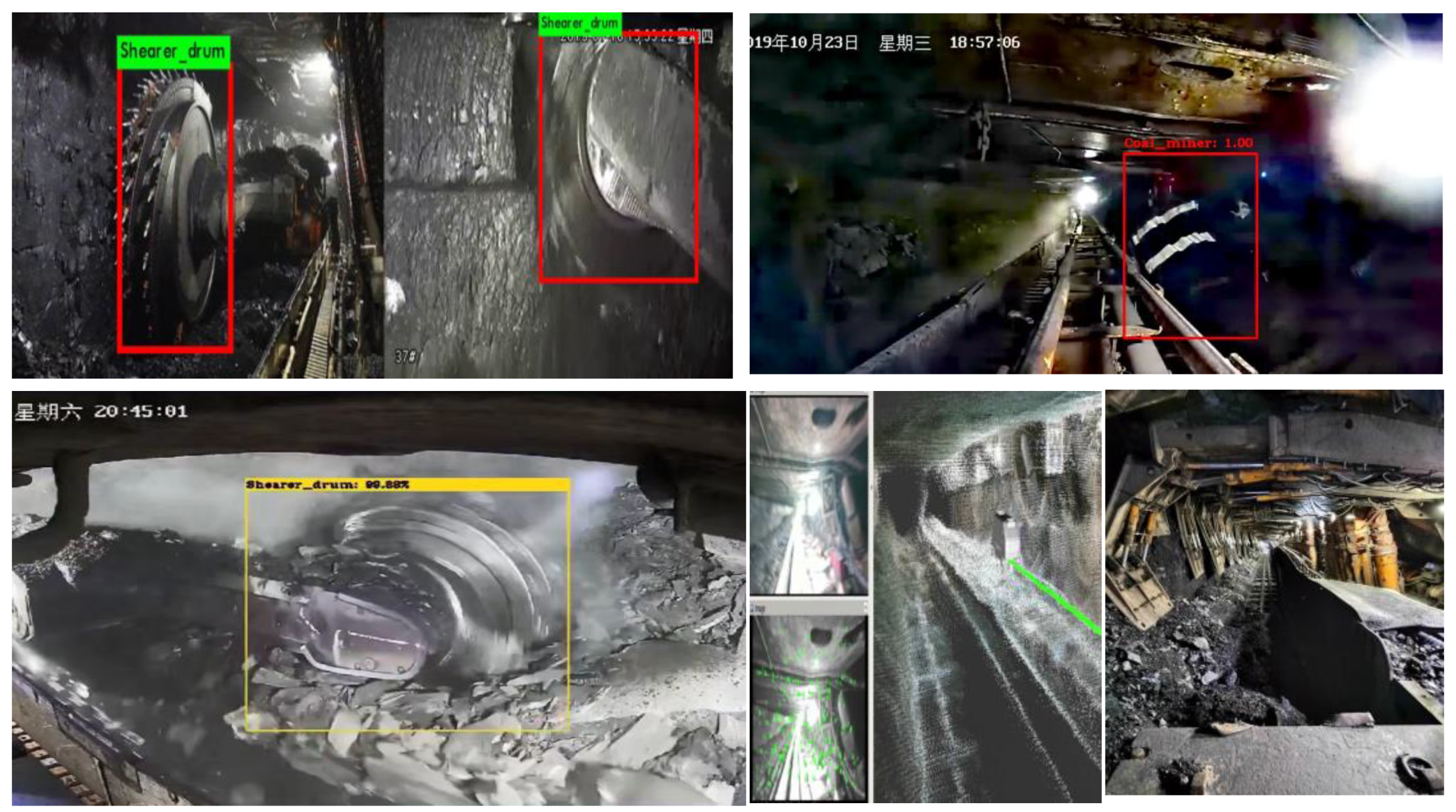
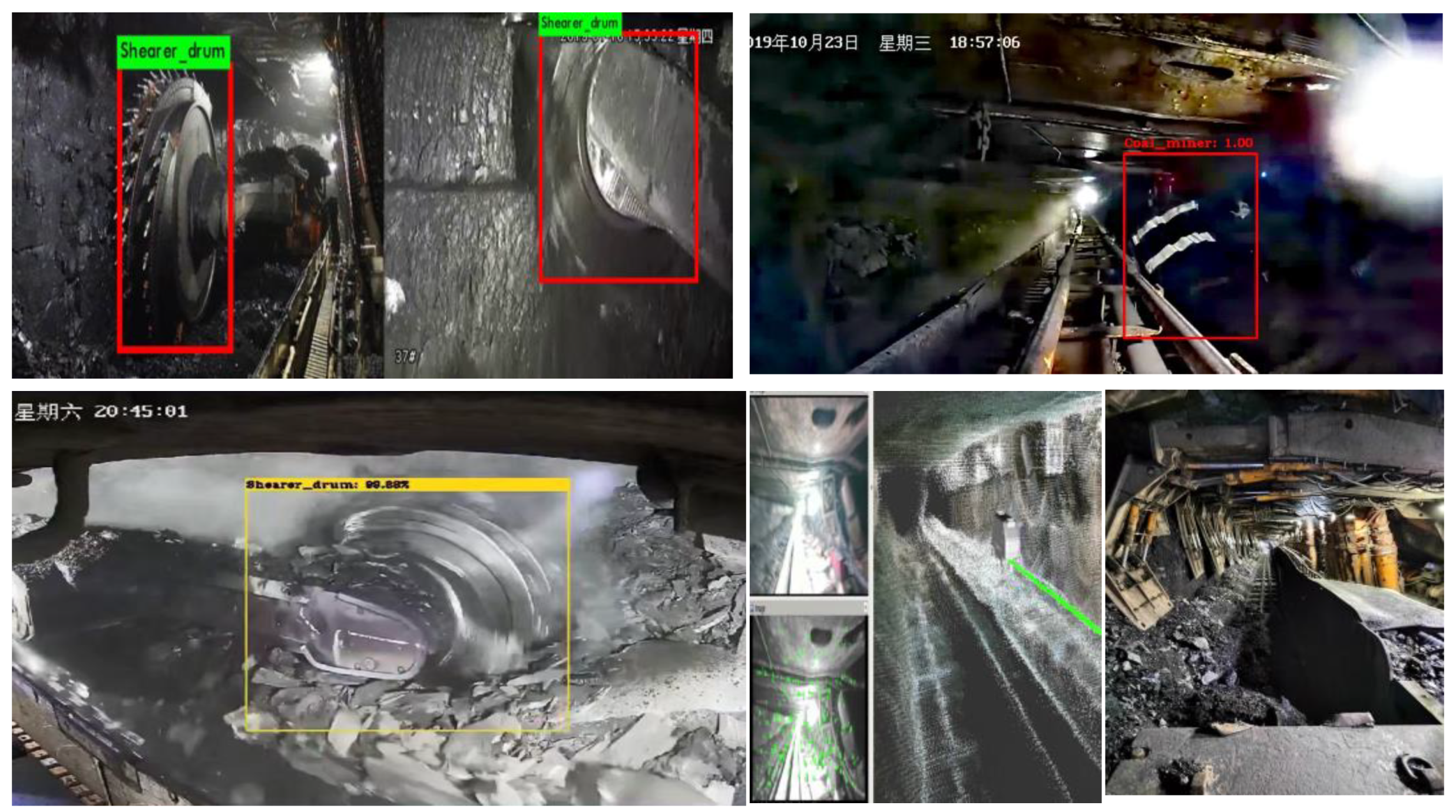
- The shearer cutting template optimization editing algorithm is based on the fusion of historical data-filtering and mean processing. The cutting template trajectory collision algorithm is developed. The coal cutting planning template is proposed such that the accuracy will be higher than the shearer cutting template data planning, reaching 95%. The remote manual intervention is less than 10%. By enriching the visual remote intervention control technology, the image recognition system is used to carry out intelligent monitoring of the position of the shearer drum, the working face personnel, the upstream drum of the coal flow, the block coal, and the tail scraper conveyor; and abnormal working conditions are actively monitored with alarms.
- (3)
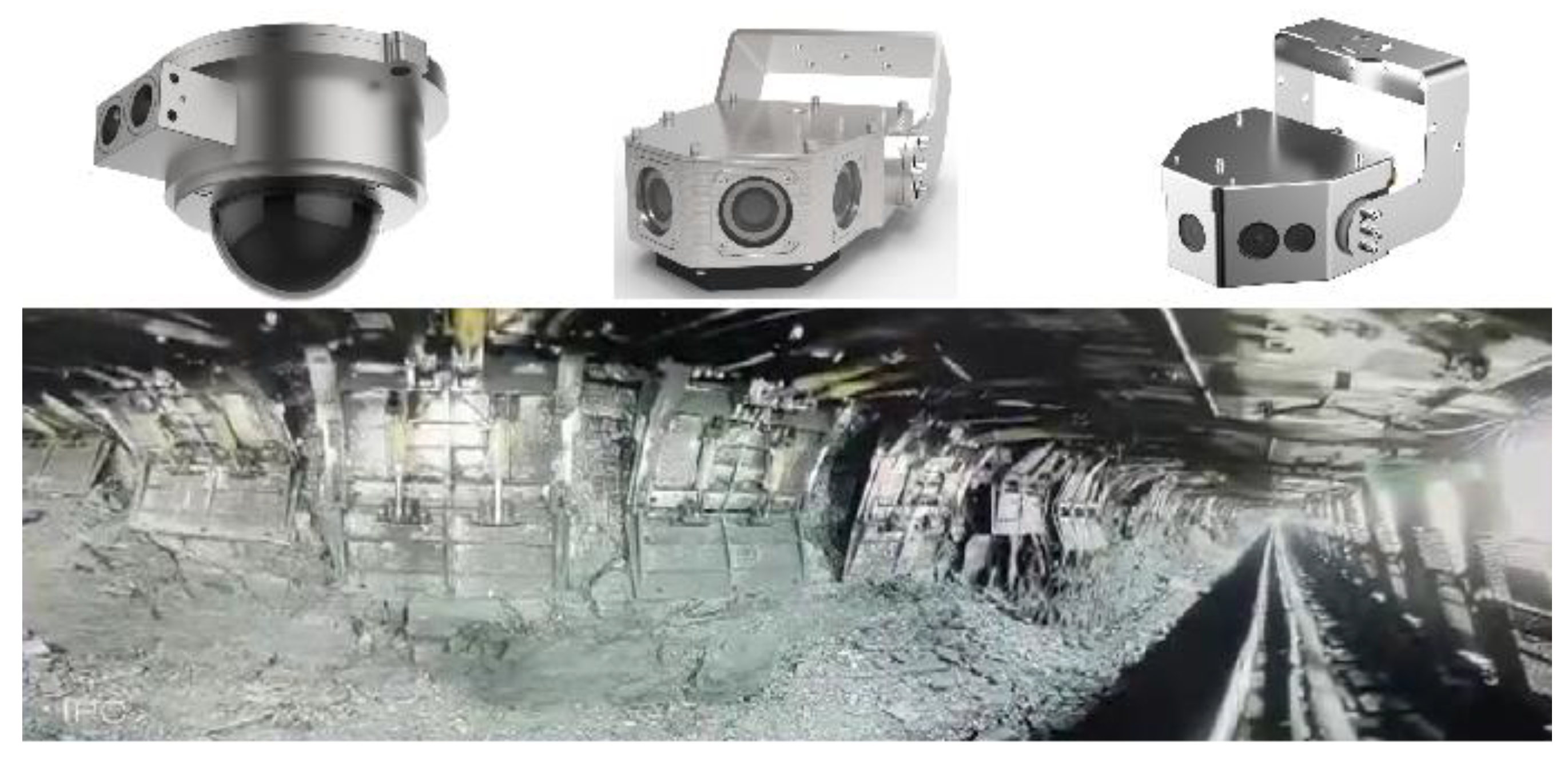
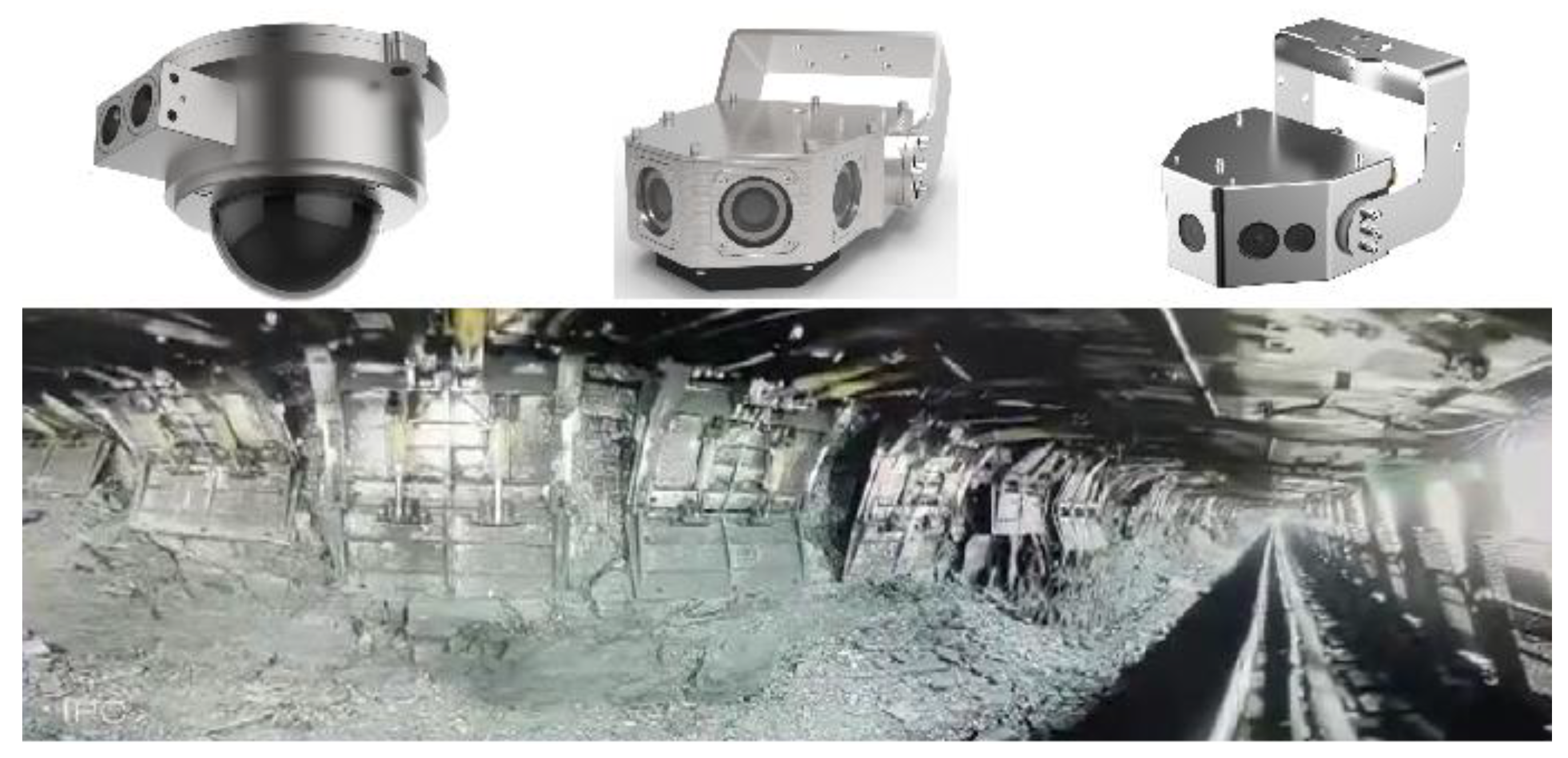
- A highly integrated fully mechanized mining production video monitoring robot was developed to monitor two main production areas: the shearer drum and the hydraulic roof support. From using virtual reality-enhanced display technology to view real-time scenes, the intelligent recognition accuracy of the hydraulic roof support working condition was found to be greater than 95%. The shearer cutting state monitoring technology based on the sensory knowledge of sound characteristics in the process of shearer cutting and coal–rock wall impact was realized, and the recognition accuracy of the shearer drum cutting voice print was greater than 75%. The voice print recognition system is used to sense the sound characteristics in the process of the shearer cutting and coal–rock wall impact and is able to recognize shearer coal breaking and rock breaking states. The application of enhanced visual remote-monitoring technology supports the remote monitoring and production decision making of the ground main control center personnel, providing technical support for the normalization of the intelligent unmanned mining on the working face.
- (4)
- The production efficiency continues to improve. Since the adoption of unmanned supervision and remote patrol unmanned production on the working face on 1 October 2022, the single-shift production record was refreshed four consecutive times, and the goal of 12-loop coal production was achieved. On October 4, the single-shift unmanned production of 50 units in six loops exceeded the manual coal cutting efficiency for the first time. On October 7, the round-shift unmanned approach achieved 13 loops, refreshing the record again. From October 16 to October 22, the demonstration project completed 7 days of continuous unmanned coal mining. The number of working faces decreased, but the output increased, significantly improving the production efficiency. The mining statistics for a period of time are shown in Table 4.
6.3. Successful Practical Case of Mining Robot Crowds in Chinese Coal Mines
7. Conclusions
- (1)
- An intelligent coal mine robot crowd management and control platform has been developed to realize the cross-domain integration of multi-source heterogeneous data from the whole mine; to realize the integrated control of coal mine robot crowd operations and mining operations for the first time; and to break down the information–interaction barrier among individual robots. The digital twin problem between virtual mapping and real mapping for the intelligent control of human power systems has been resolved.
- (2)
- The high-precision control technology of underground heavy-load mechanical arms in coal mines has been created; a jet grouting robot, a pipeline installation robot, and a tunneling repair robot have been developed, and the man–machine collaboration of heavy-load robot–cloud edge synergy crowd collaborative control has been achieved.
- (3)
- A hierarchical scheduling and planning strategy for coal mine machinery populations has been constructed. A process knowledge graph, based on the early innovation and application practice, has been created including information on intelligent tunneling, intelligent coal mining, intelligent transportation, and intelligent safety control.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- IEA. World Energy Outlook 2023. Available online: https://origin.iea.org/reports/world-energy-outlook-2023 (accessed on 3 March 2024).
- IPCC. Climate Change 2022 Mitigation of Climate Change Summary for Policymakers; IPCC: Geneva, Switzerland, 2022.
- Ge, S.; Zhang, F.; Wang, S.; Wang, Z. Research on technical architecture of digital twin intelligent coal mining face. J. China Coal Soc. 2020, 45, 1925–1936. [Google Scholar]
- Zhang, P. Collaborative control of robots in intelligent mine. Ind. Mine Autom. 2021, 47, 43–44. [Google Scholar]
- Han, A.; Chen, X.; He, Y.; Gao, W. Construction conception of intelligent mine integrated management and control platform. Ind. Mine Autom. 2021, 47, 7–14. [Google Scholar]
- Wang, G.; Fan, J.; Xu, Y.; Ren, H. Innovation progress and prospect on key technologies of intelligent coal mining. Ind. Mine Autom. 2018, 44, 5–12. [Google Scholar]
- Wang, G. New technological progress of coal mine intelligence and its problems. Coal Sci. Technol. 2022, 50, 1–27. [Google Scholar]
- Wang, G.; Du, Y.; Pang, Y. Technical characteristics and requirements of 6S intelligent coal mine. Intell. Mine 2022, 3, 2–13. [Google Scholar]
- Wang, G.; Zhao, G.; Hu, Y. Application prospect of 5G technology in coal mine intelligence. J. China Coal Soc. 2020, 45, 16–23. [Google Scholar]
- Huang, Z.; Wang, F.; Zhang, S. Research on intelligent coal mining system architecture and key technologies. J. China Coal Soc. 2020, 45, 1959–1972. [Google Scholar]
- Wang, G. Management measures for the acceptance of intelligent demonstration coal mines (trial)—Interpretation from the perspective of the compilation team. J. Intell. Mine 2022, 3, 2–10. [Google Scholar]
- Wang, G. Accelerate the intelligent construction of coal mines and promote the high-quality development of the coal industry. China Coal 2021, 47, 2–10. [Google Scholar]
- Ren, H.; Wang, G.; Zhao, G.; Cao, X.; Du, Y.; Li, S. Information logic model and mining system decision control method of smart coal mine. J. China Coal Soc. 2019, 44, 2923–2935. [Google Scholar]
- Wang, G.; Zhang, T.; Wang, C.; Pang, Y.; Yang, T.; Sun, C.; Hu, Y.; Zhang, P. Research on development strategy of energy and mining industry governance system based on new generation information technology. Eng. Sci. 2022, 24, 176–189. [Google Scholar]
- Li, S.; Ren, H. Research progress and prospect of position and attitude measurement technology for three machines of fully mechanized mining face. Coal Sci. Technol. 2020, 9, 218–226. [Google Scholar]
- Fan, J.; Xu, J.; Zhang, Y. Intelligent unmanned fully mechanized mining technology under different geological conditions of coal seam. Coal Sci. Technol. 2019, 47, 43–52. [Google Scholar]
- Wang, G.; Du, Y. Framework and construction ideas of intelligent standard system for coal mine. Coal Sci. Technol. 2020, 48, 1–9. [Google Scholar]
- Li, S.; Wang, F.; Liu, S.; Zhang, G.; Zhang, X. Research on key technology of inspection robot for Fully mechanized mining face. Coal Sci. Technol. 2020, 48, 218–225. [Google Scholar]
- Wang, G.; Liu, F.; Meng, X.; Fan, J.; Wu, Q.; Ren, H.; Pang, Y.; Xu, Y.; Zhao, G.; Zhang, D. Research and Practice of coal mine Intellectualization (primary stage). Coal Sci. Technol. 2019, 47, 1–36. [Google Scholar]
- Hao, Y.; Yuan, Z. Design of automatic inspection robot system for Fully mechanized mining face. Coal Sci. Technol. 2020, 48, 5. [Google Scholar]
- Meng, Q. Discussion on the Application Architecture of 5G technology in coal mine. Ind. Mine Autom. 2020, 46, 28–33. [Google Scholar]
- Wei, K. Optimization Design of the Robot Arm for Inspection Robot in Unmanned Mining Face. Mod. Min. 2019, 35, 206–208+214. [Google Scholar]
- Niu, J. Research on unmanned key technology of Fully mechanized mining face based on video inspection. Coal Sci. Technol. 2019, 47, 141–146. [Google Scholar]
- Ge, S.; Hu, Y.; Pei, W. Robot system and key technologies in coal mine. J. China Coal Soc. 2020, 45, 455–463. [Google Scholar]
- Yang, X.; Wang, R.; Wang, H.; Li, W. Pose Detection of Hydraulic support inspection Robot based on Motion Process Reduction Method. J. Taiyuan Univ. Technol. 2020, 51, 162–170. [Google Scholar]
- Hu, Q.; Zhang, H.; Li, S.; Sun, Y. Smart coal mine target Location Service Technology based on Big Data and AI. Coal Sci. Technol. 2020, 8, 1–10. [Google Scholar]
- Zhang, X.; Zhou, Y.; Yang, W. Application of pose detection technology in mine face inspection robot. Sens. Microsyst. 2020, 39, 152–155+160. [Google Scholar]
- Zhang, S.; Ma, J.; Cen, Q. Research on inspection robot system of Fully mechanized mining face in Coal mine. Coal Sci. Technol. 2019, 47, 136–140. [Google Scholar]
- Zhang, S.; Liu, S. Experimental research on penetrating detection of coal and rock by pulse radar. J. China Coal Soc. 2019, 44, 340–348. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot Groups | Robot Names | Order |
|---|---|---|
| Tunneling robot | Excavating working face machine crowd | 1 |
| Driving robot | 2 | |
| Full-section vertical shaft shield robot | 3 | |
| Temporary shield support robot | 4 | |
| Anchor robot | 5 | |
| Spraying robot | 6 | |
| Water exploration drilling robot | 7 | |
| Anti-process drilling robot | 8 | |
| Anti-impact drilling robot | 9 | |
| Coal mining robot | Coal mining robot crowds | 10 |
| Shearer robot | 11 | |
| Advance roof support robot | 12 | |
| Filling and roof support robot | 13 | |
| Open-pit mine perforated blasting robot | 14 | |
| Transportation robot | Handling robot | 15 |
| Broken robot | 16 | |
| Car yard cart robot | 17 | |
| Tunneling cleaning robot | 18 | |
| Coal bunker cleaning robot | 19 | |
| Water warehouse cleaning robot | 20 | |
| Choose rock robot | 21 | |
| Tunneling dust-washing robot | 22 | |
| Underground unmanned transport vehicle | 23 | |
| Automatic loading system for open pit electric shovel | 24 | |
| Open-pit mine truck unmanned system | 25 | |
| Security control robot | Working face inspection robot | 26 |
| Pipeline inspection robot | 27 | |
| Ventilation-monitoring robot | 28 | |
| Dangerous gas inspection robot | 29 | |
| Automatic drainage robot | 30 | |
| Closed masonry robot | 31 | |
| Pipe-mounting robot | 32 | |
| Belt conveyor inspection robot | 33 | |
| Well safety intelligent inspection robot | 34 | |
| Tunneling inspection robot | 35 | |
| Rescue robot | Underground emergency rescue operation robot | 36 |
| Mine rescue robot | 37 | |
| Post-disaster search and rescue of an amphibious robot | 38 |
| Variable Name | Function Name | Scope of Variables |
|---|---|---|
| Shearer forward displacement | Shearer move forward-1_S1232 | 1~2000 m |
| Shearer back displacement | Shearer move backward_S1232 | 1~2000 m |
| Turning state of the left roller | Left drums state_S1232 | 0, 1 |
| Turning state of the right drum | Right drums state_S1232 | 0, 1 |
| Left rocking arm rotation angle | Left arm rotation angle_S1232 | −15~+35° |
| Right rocking arm rotation angle | Right arm rotation Angle_S1232 | −15~+35° |
| Left oil cylinder length | Left cylinder length_S1232 | 0~800 mm |
| Right oil cylinder length | Right cylinder length_S1232 | 0~800 mm |
| Device | Control Script | Synergistic Relationship |
|---|---|---|
| Shearer | Height adjusted for shaking arm of shearer, shearer walk, speed, etc. | When the shearer is running, the front roller and the front roof support start to act and the guard plate shrinks. |
| Support | Drop roof support, roof support push slip, etc. Scrapper running, moving | Push the slip; after the roof support is completed, the roof support falls. |
| Conveyor | Scrapper running, moving | When the roof support is lowered, the scraper is lost. |
| Duration | Work Shifts | Cut Loop Number | Detailed Information |
|---|---|---|---|
| 29 September 2022 | Middle shift | One loop | The first verification: one person on the face patrol. |
| 30 September 2022 | Middle shift | Two loops of 80 sets | Only one person on the face patrol. |
| 4 October 2022 | Midnight shift | Six loops | Ground cutting coal, the first two loops: one person with the machine patrol; and the last four loops: in the middle of the unmanned machine operation. |
| 5 October 2022 | Midnight shift | Six loops of 10 sets | Ground cutting coal, the middle of the machine operation, and the head and tail: one person monitoring. |
| 7 October 2022 | Regular shift | Thirteen loops | Ground cutting coal, the middle of the machine operation, and the head and tail: one person monitoring. |
| 8 October 2022 | Midnight shift | Seven loops | The ground is cut into coal, and for the whole face, no-one works with the machine. |
| 15 October 2022 | Middle shift | Six loops | Cutting coal is on the ground, and for the whole face, no-one works with the machine. |
| 16 October 2022 ~22 October 2022 | Regular shift | Eighty-seven loops | Ground cutting coal, the middle of the machine operation, and the head and tail: one person monitoring. |
| 15 November 2022 | Regular shift | Thirteen loops | Ground cutting coal, the middle of the machine operation, and the head and tail: one person monitoring. |
| Application of Coal Mine | Robotic Technology Used | Results with Mining Robot Crowds | Province | City |
|---|---|---|---|---|
| BaoDe Coal Mine | Mining and discharging collaborative working face based on the F5G network, which establishes the intelligent coal release algorithm and process model for mining and discharge coordination | The number of workers in a single class of the working face was reduced from thirteen to seven workers in a single class. | Shanxi | XinZhou |
| HuaNing Coal Mine | A full-height intelligent working face with shearer robot and support robot | The fully mechanized mining team was reduced from 124 during the coal period to 87. During the production class, there was one central control room operator, one shearer inspector, two shield inspectors, one three-machine inspector, and one tape machine inspector. | Shanxi | HouMa |
| NaLinHe Coal Mine | Intelligent fully mechanized mining system based on geological integration and inertial navigation | In the manual operation of the ordinarily fully mechanized mining face, at least 11 miners were needed for the working face. After intelligent mining, only five miners were needed for a single-shift production: one coal machine and one support inspector; one monitor, one person for the head and tail inspection; and one person for the console. | Inner Mongolia | Ordos |
| WangJiaLing Coal Mine | Intelligent integrated discharge working face with shearer robot and support robot | The coal working face was reduced by 30%, the working efficiency reached 181 tons/miner, and the annual production capacity increased by 960,000 t/a. | Shanxi | HouMa |
| ZhuanLongWan Coal Mine | Medium–thick super-long ten million tons of intelligent fully mechanized mining face | The maximum number of automatic coal cutters in the working face was 25, and the maximum daily output was 40,000 t. The number of working face support workers was reduced from four to one, and the number for normal production was no more than one. | Inner Mongolia | Ordos |
| HuangLing No.1 Coal Mine | Intelligent mining system based on transparent geological planning and cutting | The working face realized unmanned mining, completely liberating the inspection personnel and remote monitors of the working face, and made remarkable achievements in reducing the personnel and increasing efficiency. In the production process, the intervention control and adjustment of the operation time were greatly reduced, and the production efficiency was increased by about 30%. | Shaanxi | YanAn |
| XinJuLong Coal Mine | Intelligent coal mining working face with shearer robot and support robot | The production personnel were reduced. Through the normal operation of the basic functions such as machine removal, memory cutting, and the automatic cutting of triangle coal, the production mode of “7 + 5” (seven miners producing; five miners engaged in echelon training for civilized renovation, end-coal discharge, and floating coal cleaning) was realized, reducing to eight miners per day, and the working efficiency of the tons of coal was improved to 81.25 t/workers. | Shandong | HeZe |
| XiaoBaoDang Coal Mine | The 450 m ultra-long intelligent mining working face with shearer robot and support robot | The automatic adjustment of the shield state was realized, along with the working face fluctuation change and the mining height and coal cutting speed. The shearer speed reached more than 10~15 m per minute, the production efficiency improved by 15%, the highest coal cutting was 19 knives, and the highest daily output was 46,000 t. | Shaanxi | YuLin |
| LongWangGou Coal Mine | Intelligent and efficient fully mechanized discharge working face of extremely thick coal seam | The number of direct production at the working face was reduced from twelve to five; the coal mining efficiency was increased by three times to 96.3 tons/day; the labor cost of coal was CNY 11.66; the comprehensive power consumption of coal was reduced to less than 8 degrees; the energy consumption rate was reduced by more than 30%; and the annual saving was more than CNY 10 million. | Shaanxi | Jungar |
| SanYuan Coal Mine | Intelligent fully mechanized mining working face with shearer robot and support robot | The panoramic video splicing system of the fully mechanized mining face provided a more intuitive and clearer control interface for the upper and lower operators, improving the safety and reliability of the remote control of the fully mechanized mining and providing another mode for the remote control of the fully mechanized mining. | Shanxi | ChangZhi |
| QianJiaYing Coal Mine | Intelligent mining working face of thin coal seam | The working face automatic production mode of “working face automatic control, supplemented by the remote intervention control of the monitoring center” was realized. Each shift can save six miners, and the labor intensity of the workers was greatly reduced by the automatic shift and the top slip. | Hebei | TangShan |
| PingBao Coal Mine | 5G + intelligent coal mining system | The production staff at the working face was reduced from twenty-two to six, truly realizing safe, efficient, and intelligent coal mining. | Henan | XuChang |
| LongTan Coal Mine | Intelligent mining working face of thin coal seam with complex geological conditions | The number of single-shift production workers was reduced from 18 to 10, saving labor costs by CNY 1.12 million per year. | Sichuan | GuangAn |
| JiaYang Coal Mine | Intelligent fully mechanized mining face of thin coal seam | The production team of the working face was reduced from five teams in the original fully mechanized mining face (the working face layout) to two teams, and the daily production staff was reduced from sixty-one to eight, a reduction of 87%. The working efficiency reached 406 t/miner. | Sichuan | Leshan |
| MaDiLiang Coal Mine | Intelligent mining system with 5G+, shearer robot and support robot | In two shifts of production, the working face configuration was three miners (when the roof and the surface geological conditions are poor, five miners are needed) to meet the normal production work, compared with the traditional comprehensive working face where each shift, there were fifteen miners. | Inner Mongolia | Ordos |
| XiaoNan Coal Mine | Intelligent coal mining working face with shearer robot and support robot | During the production period of the working face, the production team was reduced from fifteen to seven miners, realizing the purpose of fewer miners. Compared with the traditional fully mechanized mining face mining, where efficiency was 87 t, the mining efficiency of the intelligent coal mining face was 153 t. | Liaoing | TieLing |
| DongHuai Coal Mine | Intelligent fully mechanized mining working face with 5G+, shearer robot, and support robot | The working face reduced to 12 production miners, which could save CNY 1.7352 million per year. | Guangxi | BaiSe |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Ge, S.; He, Y.; Wang, D.; Zhang, S. Research on the Intelligent System Architecture and Control Strategy of Mining Robot Crowds. Energies 2024, 17, 1834. https://doi.org/10.3390/en17081834
Huang Z, Ge S, He Y, Wang D, Zhang S. Research on the Intelligent System Architecture and Control Strategy of Mining Robot Crowds. Energies. 2024; 17(8):1834. https://doi.org/10.3390/en17081834
Chicago/Turabian StyleHuang, Zenghua, Shirong Ge, Yonghua He, Dandan Wang, and Shouxiang Zhang. 2024. "Research on the Intelligent System Architecture and Control Strategy of Mining Robot Crowds" Energies 17, no. 8: 1834. https://doi.org/10.3390/en17081834
APA StyleHuang, Z., Ge, S., He, Y., Wang, D., & Zhang, S. (2024). Research on the Intelligent System Architecture and Control Strategy of Mining Robot Crowds. Energies, 17(8), 1834. https://doi.org/10.3390/en17081834