



Particle Swarm-Optimized Fuzzy Logic Energy Management of Hybrid Energy Storage in Electric Vehicles




Abstract
1. Introduction
2. System Modeling
2.1. Motor/Controller
2.2. Battery Model
2.3. Ultracapacitor Model
2.4. DC/DC Converter Model
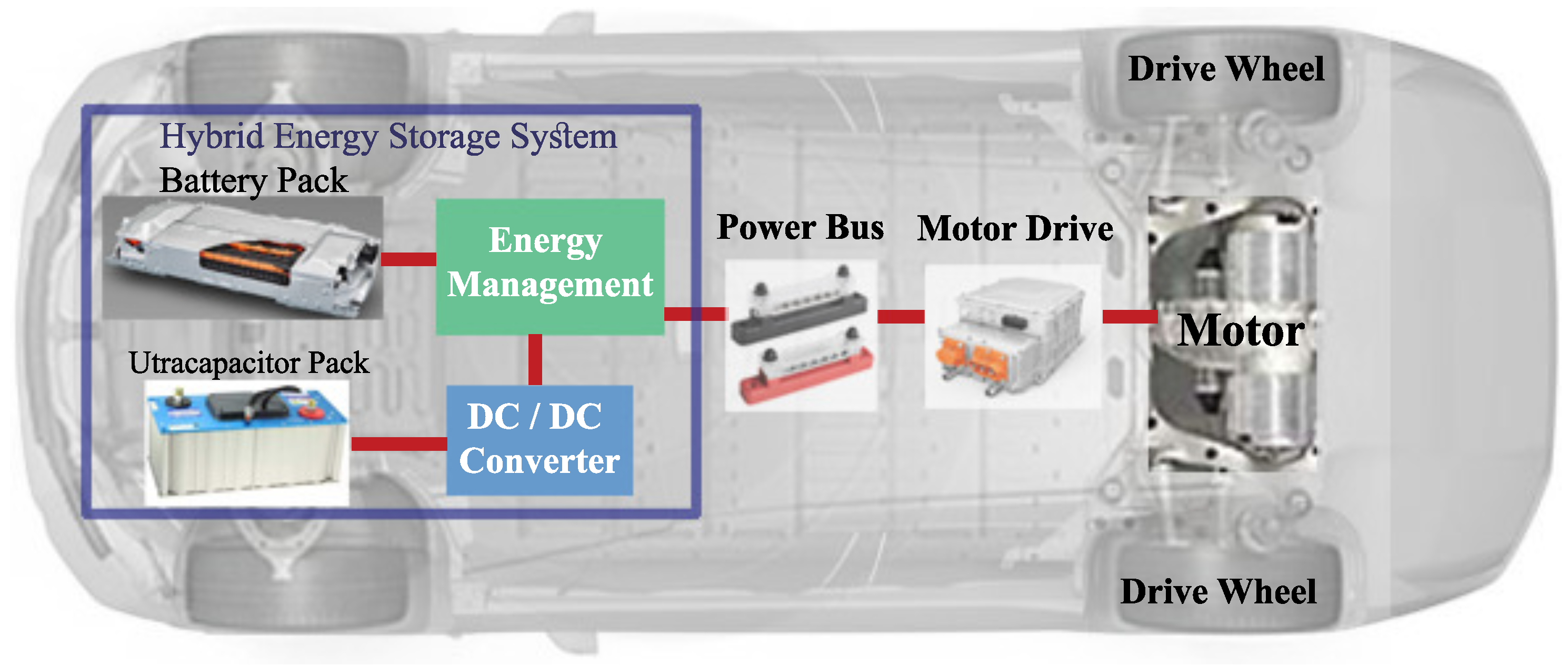
2.5. Hybrid Energy Storage System Formation
3. Energy Management Strategy
3.1. Fuzzy Logic Control
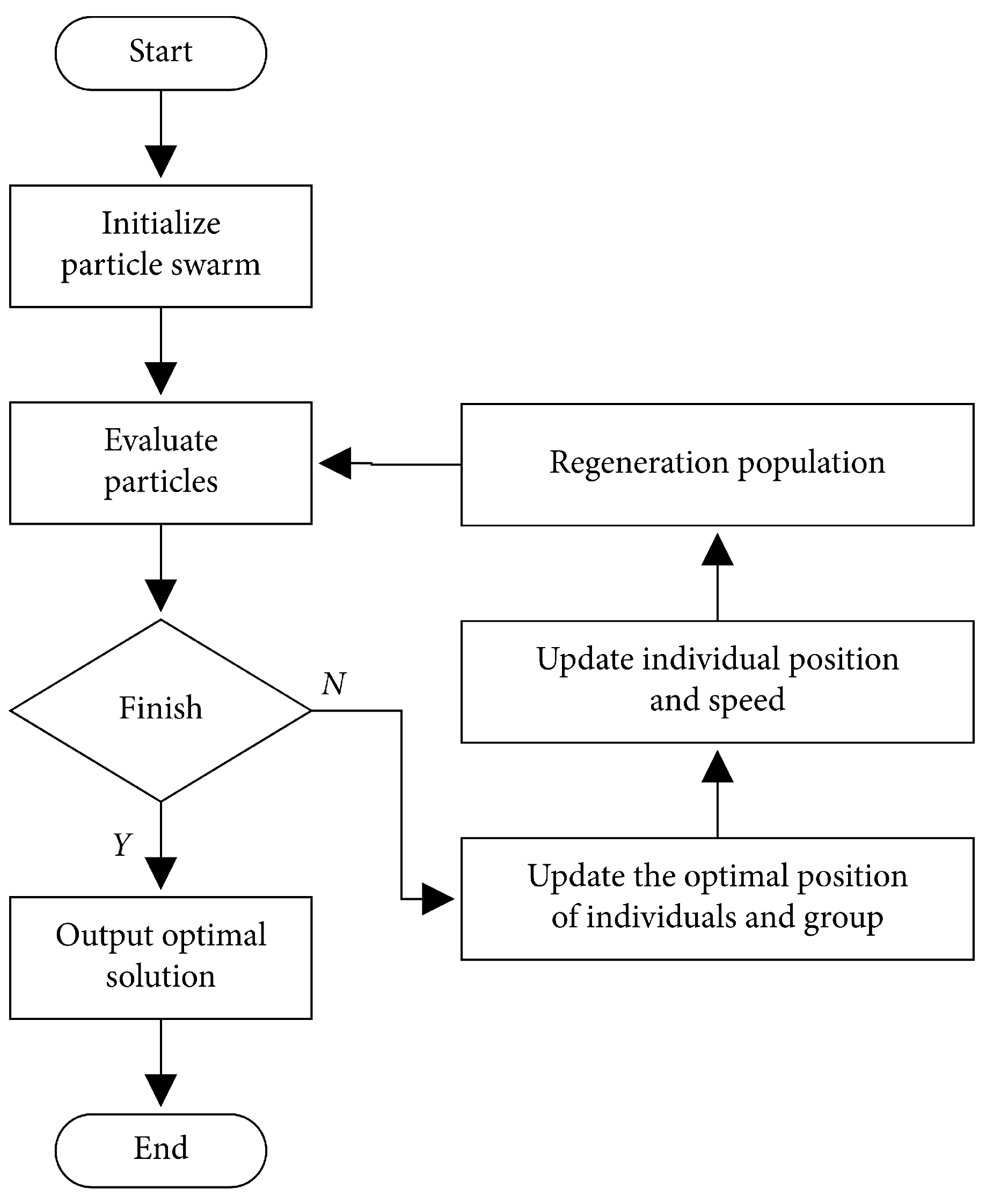
3.2. Particle Swarm Optimization
- The first term, , is the inertia term, which allows the particle to maintain its current direction of movement.
- The cognitive term, represented by in Equation (22), is influenced by the particle’s individual best location and encourages it to move towards that position.
- The third term is the social term, denoted by , which is affected by the group’s global best location. This term influences the particle to move towards the global best position.
3.3. Optimization of FLC with PSO Considering Battery Temperature Effect
- Initialize the algorithm by setting the number of iterations to 38, the number of particles to 16, the maximum velocity to 0.5, and the minimum velocity to −0.5.
- Generate particles with random positions and velocities within the defined search space.
- Simulate the EV model from the MATLAB script containing the PSO algorithm.
- Evaluate the fitness of individual particles by applying the fitness function.
- Update the particle position and velocity based on the PSO algorithm. The position update is based on the global and local best positions found so far, while the velocity update is based on the current position and the previous velocity.
- Evaluate the fitness of the new particles and update the global and local best positions.
- Repeat steps 5 and 6 until a stopping criterion is met, such as the maximum number of iterations or when the desired optimal fitness value is obtained.
- Write the global best particle position as the weights to fuzzy rule sets.
4. Results and Analysis
4.1. Platform
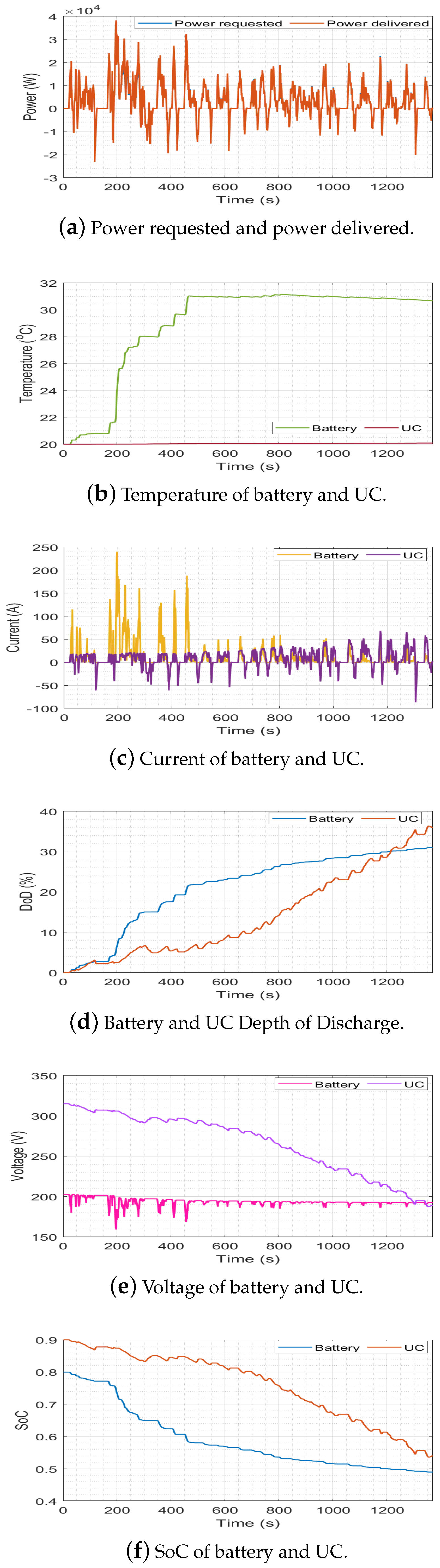
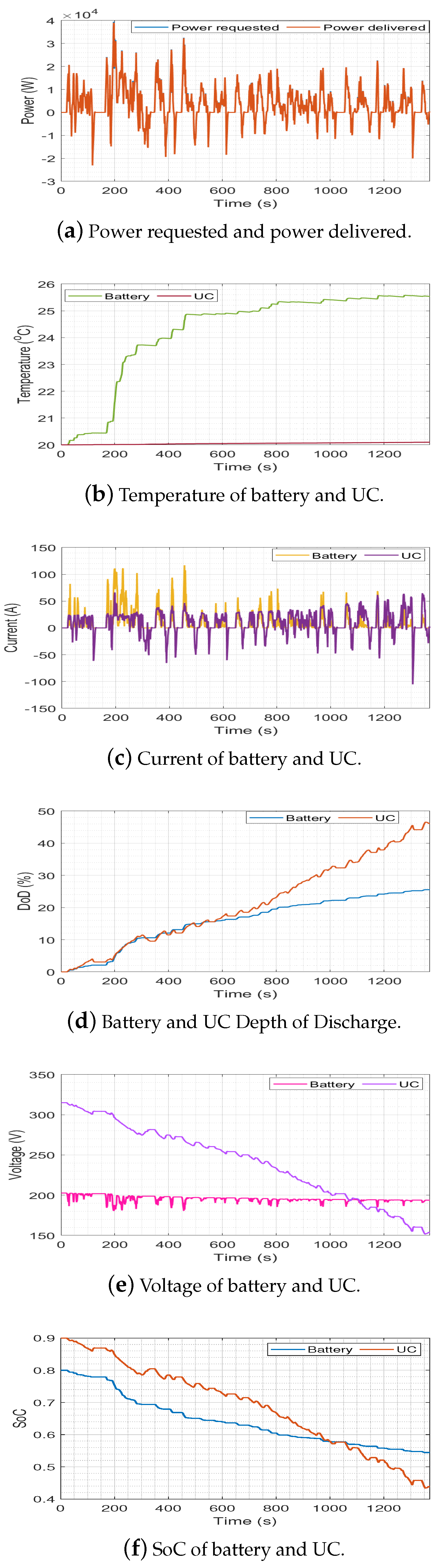
4.2. Simulation Results of Unoptimized EMS
4.3. Simulation Results of Optimized EMS
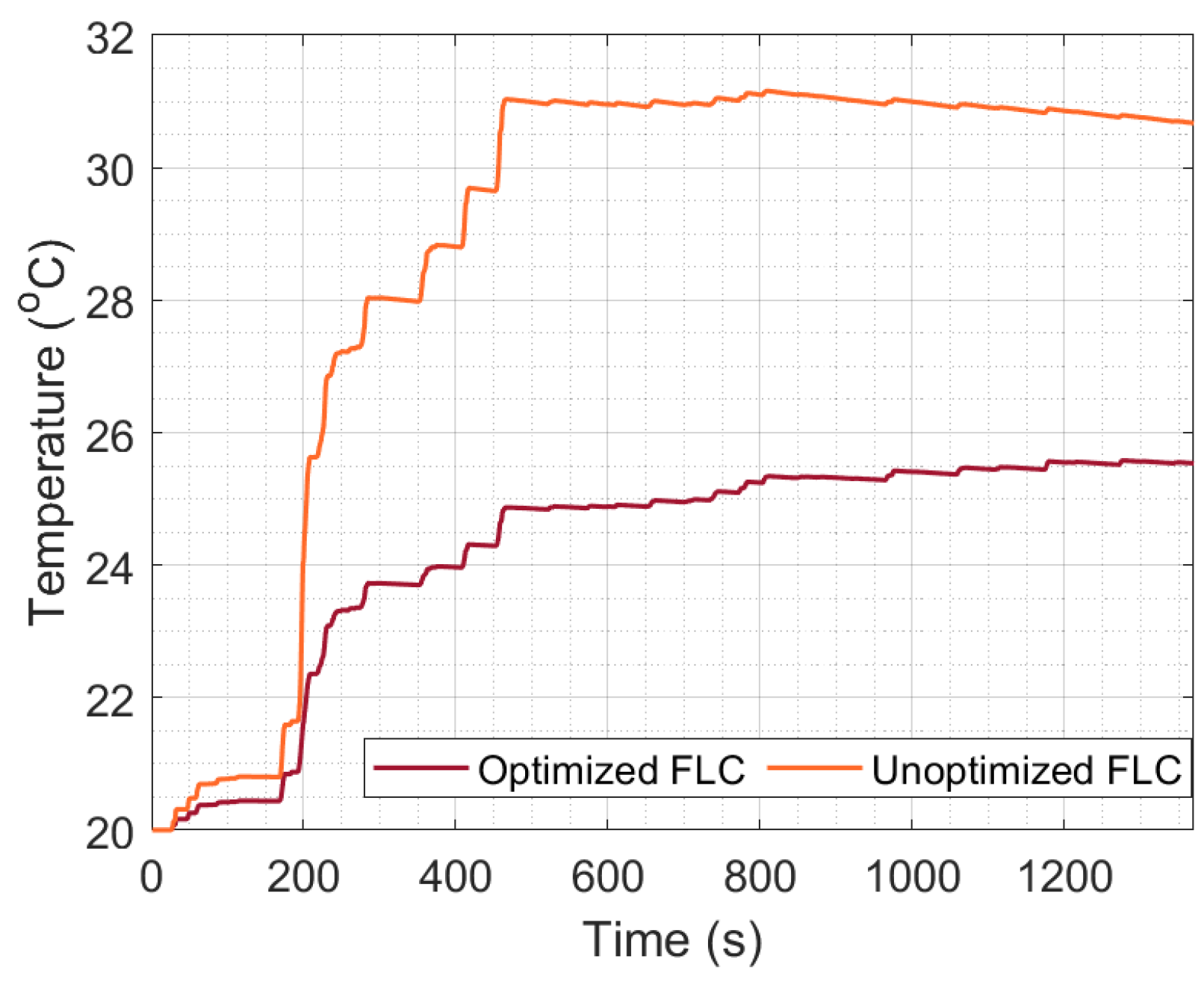
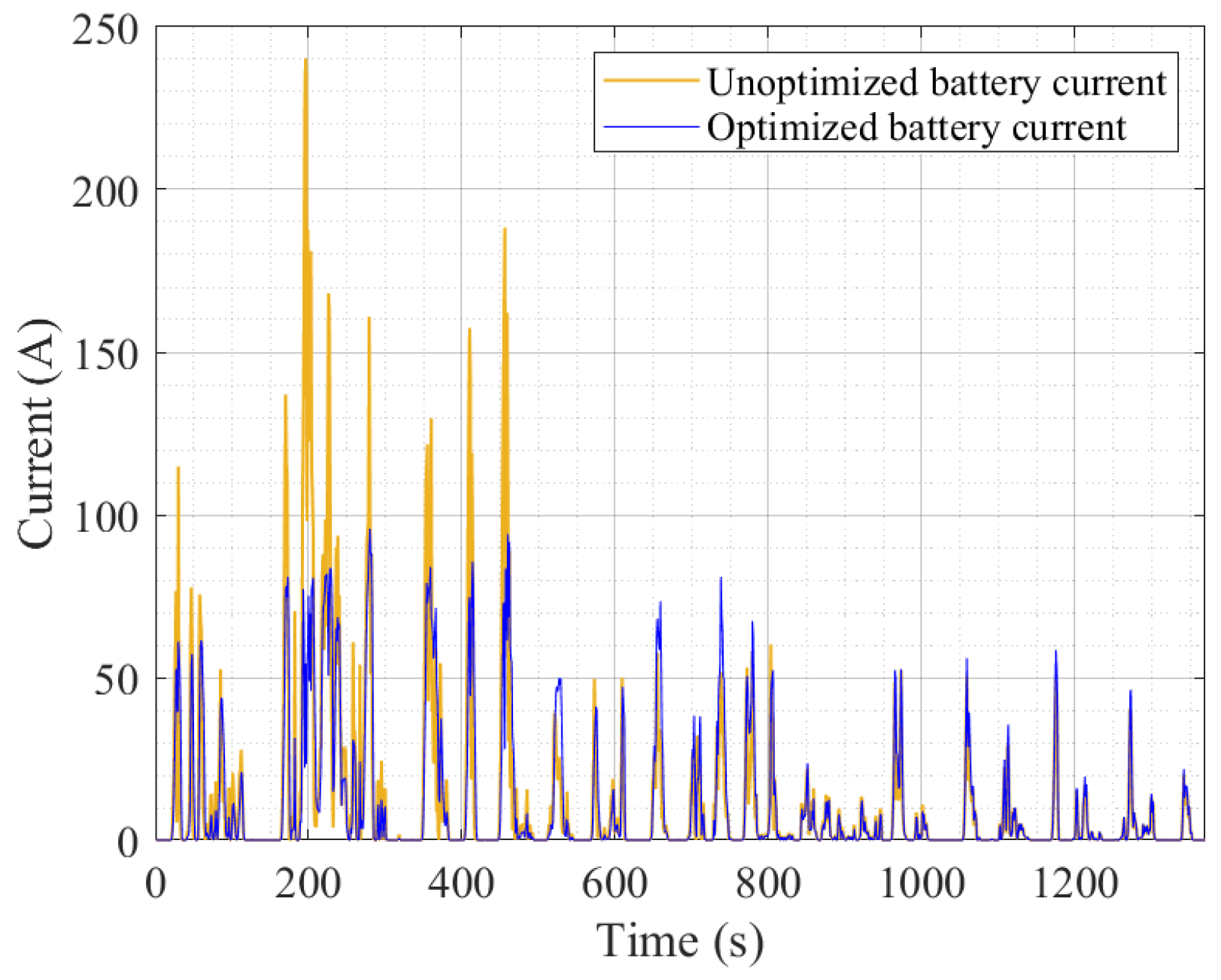
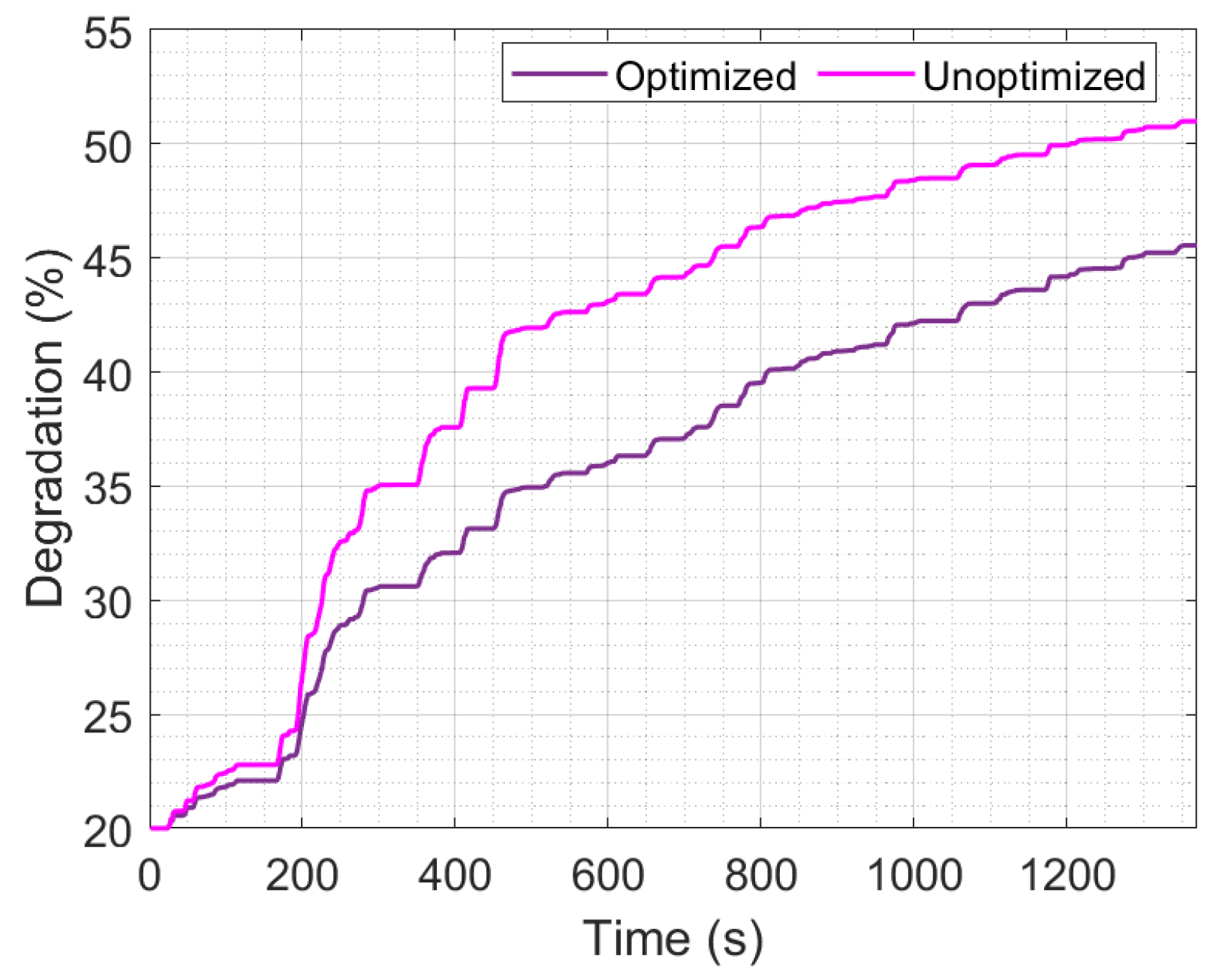
4.4. Comparison of Optimized and Unoptimized EMSs
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Fuzzy Logic Parameter Values
- [System]
- Name = fisEV_iter30
- Type = sugeno
- Version = 2.0
- NumInputs = 5
- NumOutputs = 2
- NumRules = 37
- AndMethod = prod
- OrMethod = probor
- ImpMethod = prod
- AggMethod = sum
- DefuzzMethod = wtsum
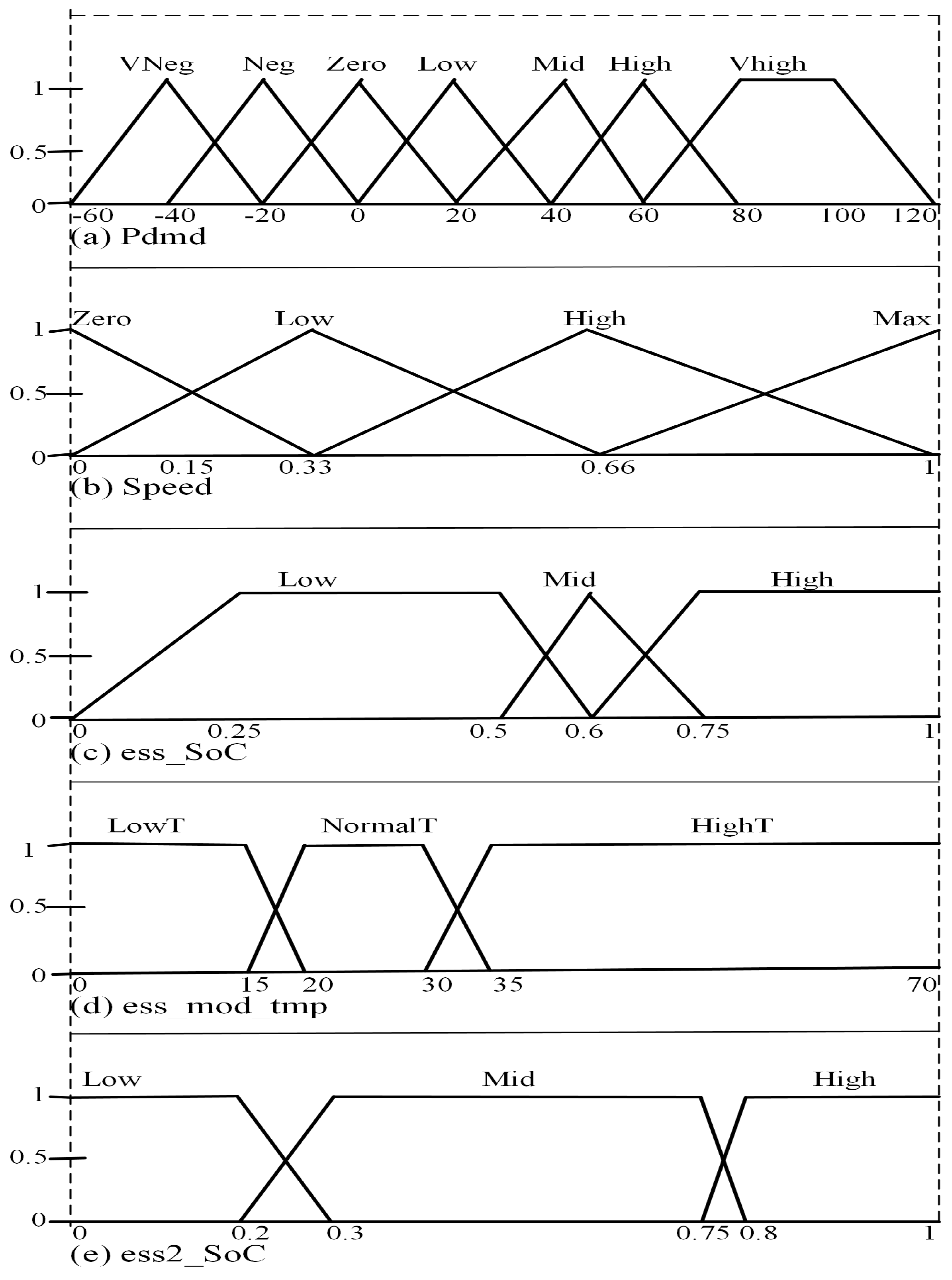
- [Input1]
- Name = Pdmd
- Range = [−60 120]
- NumMFs = 7
- MF1 = ‘VNeg’:‘trimf’, [−60 −40 −20]
- MF2 = ‘Neg’:‘trimf’, [−40 −20 0]
- MF3 = ‘Zero’:‘trimf’, [−20 0 20]
- MF4 = ‘Low’:‘trimf’, [0 20 40]
- MF5 = ‘Mid’:‘trimf’, [20 40 60]
- MF6 = ‘High’:‘trimf’, [40 60 80]
- MF7 = ‘Vhigh’:‘trapmf’, [60 80 100 120]
- [Input2]
- Name = ‘speed2’
- Range = [0 1]
- NumMFs = 4
- MF1 = ‘zero’:‘trimf’, [−0.33 0 0.33]
- MF2 = ‘low’:‘trimf’, [0 0.33 0.6667]
- MF3 = ‘high’:‘trimf’, [0.33 0.6667 1]
- MF4 = ‘max’:‘trimf’, [0.6667 1 1.32]
- [Input3]
- Name = ess_SOC
- Range = [0 1]
- NumMFs = 3
- MF1 = ‘low’:‘trapmf’, [0 0.25 0.5 0.6]
- MF2 = ‘mid’:‘trimf’, [0.5 0.6 0.75]
- MF3 = ‘high’:‘trapmf’, [0.6 0.75 1 1.8]
- [Input4]
- Name = ‘ess_mod_tmp’
- Range=[0 70]
- NumMFs=3
- MF1 = ‘LowT’:‘trapmf’, [−31.5 −10 15 20]
- MF2 = ‘NormalT’:‘trapmf’, [15 20 30 35]
- MF3 = ‘HightT’:‘trapmf’, [30 35 101.5 101.5]
- [Input5]
- Name=ess2_SOC
- Range=[0 0.95]
- NumMFs=3
- MF1 = ‘low’:‘trapmf’, [−0.3895 −0.0855 0.2 0.3]
- MF2 = ‘mid’:‘trapmf’, [0.2 0.3 0.75 0.8]
- MF3 = ‘high’:‘trapmf’, [0.75 0.8 0.95 1.377]
- [Output1]
- Name = ‘Pbat’
- Range=[0 1]
- NumMFs=9
- MF1 = ‘k1’:‘constant’, [0]
- MF2 = ‘k2’:‘constant’, [0.2]
- MF3 = ‘k3’:‘constant’, [0.3]
- MF4 = ‘k4’:‘constant’, [0.4]
- MF5 = ‘k5’:‘constant’, [0.5]
- MF6 = ‘k6’:‘constant’, [0.6]
- MF7 = ‘k7’:‘constant’, [0.7]
- MF8 = ‘k8’:‘constant’, [0.8]
- MF9 = ‘k9’:‘constant’, [1]
- [Output2]
- Name = ‘Puc’
- Range=[0 1]
- NumMFs=9
- MF1 = ‘k1’:‘constant’, [0]
- MF2 = ‘k2’:‘constant’, [0.2]
- MF3 = ‘k3’:‘constant’, [0.3]
- MF4 = ‘k4’:‘constant’, [0.4]
- MF5 = ‘k5’:‘constant’, [0.5]
- MF6 = ‘k6’:‘constant’, [0.6]
- MF7 = ‘k7’:‘constant’, [0.7]
- MF8 = ‘k8’:‘constant’, [0.8]
- MF9 = ‘k9’:‘constant’, [1]
Appendix B. Fuzzy Logic RULES
- If (Pdmd is Low) and (ess_SOC is mid) and (ess2_SOC is low) then (Pbat is k9)(Puc is k1) (0.84454).
- If (Pdmd is low) and (ess_SOC is high) and (ess2_SOC is low) then (Pbat is k9)(Puc is k1)(0.75).
- If (Pdmd is Mid) and (ess_SOC is mid) and (ess2_SOC is low) then (Pbat is k9)(Puc is k1)(0.5).
- If (Pdmd is Mid) and (ess_SOC is high) and (ess2_SOC is low) then (Pbat is k9)(Puc is k1)(0.25).
- If (Pdmd is Low) and (ess_SOC is mid) and (ess2_SOC is mid) then (Pbat is k9)(Puc is k1)(0.0012992).
- If (Pdmd is Low) and (ess_SOC is high) and (ess2_SOC is mid) then (Pbat is k9)(Puc is k1)(0.84458).
- If (Pdmd is Mid) and (ess_SOC is mid) and (ess2_S0C is mid) then (Pbat is k9)(Puc is k1) (0.75).
- If (Pdmd is Mid) and (ess_SOC is high) and (ess2_SOC is mid) then (Pbat is k9)(Puc is k1) (0.5).
- If (Pdmd is Low) and (ess_SOC is mid) and (ess2_SOC is high) then (Pbat is k9)(Puc is k1)(0.25).
- If (Pdmd is Low) and (ess_SOC is high) and (ess2_SOC is high) then (Pbat is k9)(Puc is k1)(0.0012992).
- If (Pdmd is Mid) and (ess_SOC is mid) and (ess2_SOC is high) then (Pbat is k9)(Puc is k1)(0.0012992).
- If (Pdmd is Mid) and (ess_SOC is high) and (ess2_SOC is high) then (Pbat is k9)(Puc is k1)(0.0012992).
- If (Pdmd is High) and (ess_SOC is mid) and (ess2_SOC is low) then (Pbat is k9)(Puc is k1)(0.0012992).
- If (Pdmd is High) and (ess_SOC is low) and (ess2_SOC is low) then (Pbat is k9)(Puc is k1)(0.36481).
- If (Pdmd is High) and (ess_SOC is high) and (ess2_SOC is low) then (Pbat is k9)(Puc is k1)(0.36481).
- If (Pdmd is Vhigh) and (ess_SOC is mid) and (ess2_SOC is low) then (Pbat is k9)(Puc is k1) (0.36481).
- If (Pdmd is Vhigh) and (ess_SOC is high) and (ess2_SOC is low) then (Pbat is k9)(Puc is k1)(0.034294).
- If (Pdmd is High) and (ess2_SOC is mid) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is Vhigh) and (ess2_SOC is mid) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is High) and (ess2_SOC is high) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is Vhigh) and (ess2_SOC is high) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is VNeg) and (ess2_SOC is low) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is Neg) and (ess2_SOC is low) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is Zero) and (ess2_SOC is low) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is VNeg) and (ess2_SOC is mid) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is Neg) and (ess2_SOC is mid) then (Pbat is k1)(Puc is k9).
- If (Pdmd is Zero) and (ess2_SOC is mid) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is VNeg) and (ess2_SOC is high) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is Neg) and (ess2_SOC is high) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is Zero) and (ess2_SOC is high) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is High) and (speed2 is high) and (ess_SOC is low) and (ess_mod_tmp is NormalT) and (ess2_SOC is high) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is Low) and (speed2 is high) and (ess_SOC is high) and (ess_mod_tmp is NormalT) and (ess2_SOC is high) then (Pbat is k7)(Puc is K3)(1).
- If (Pdmd is Low) and (speed2 is max) and (ess_SOC is high) and (ess_mod_tmp is NormalT) and (ess2_SOC is high) then (Pbat is k7)(Puc is k3)(1).
- If (Pdmd is Low) and (ess_SOC is low) then (Pbat is k3)(Puc is k7)(1).
- If (Pdmd is Mid) and (ess_SOC is low) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is High) and (ess_SOC is low) then (Pbat is k1)(Puc is k9)(1).
- If (Pdmd is Vhigh) and (ess_SOC is low) then (Pbat is k1)(Puc is k9)(1).
References
- Kakouche, K.; Oubelaid, A.; Mezani, S.; Rekioua, T.; Bajaj, M.; Jurado, F.; Kamel, S. Energy Management Strategy of Dual-Source Electric Vehicles Based on Fuzzy Logic Control Considering Driving Cycles. In Proceedings of the 2023 IEEE 5th Global Power, Energy and Communication Conference, GPECOM 2023, Cappadocia, Turkiye, 14–16 June 2023; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023; pp. 92–97. [Google Scholar] [CrossRef]
- Khalili, S.; Rantanen, E.; Bogdanov, D.; Breyer, C. Global transportation demand development with impacts on the energy demand and greenhouse gas emissions in a climate-constrained world. Energies 2019, 12, 3870. [Google Scholar] [CrossRef]
- Li, X.; He, F.; Zhang, G.; Huang, Q.; Zhou, D. Experiment and simulation for pouch battery with silica cooling plates and copper mesh based air cooling thermal management system. Appl. Therm. Eng. 2019, 146, 866–880. [Google Scholar] [CrossRef]
- Mehraban, A.; Ghanbari, T.; Farjah, E. AI-based Control of Storage Capacity in High Power Density Energy Storage Systems, Used in Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 10, 2293–2301. [Google Scholar] [CrossRef]
- Shen, Y.; Xie, J.; He, T.; Yao, L.; Xiao, Y. CEEMD-fuzzy Control Energy Management of Hybrid Energy Storage Systems in Electric Vehicles. IEEE Trans. Energy Convers. 2023, 39, 555–566. [Google Scholar] [CrossRef]
- Han, Y.; Li, J.; Wang, B. Event-Triggered Active Disturbance Rejection Control for Hybrid Energy Storage System in Electric Vehicle. IEEE Trans. Transp. Electrif. 2023, 9, 75–86. [Google Scholar] [CrossRef]
- Wasim, M.S.; Habib, S.; Amjad, M.; Bhatti, A.R.; Ahmed, E.M.; Qureshi, M.A. Battery-Ultracapacitor Hybrid Energy Storage System to Increase Battery Life Under Pulse Loads. IEEE Access 2022, 10, 62173–62182. [Google Scholar] [CrossRef]
- Rezaei, H.; Abdollahi, S.E.; Abdollahi, S.; Filizadeh, S. Energy managment strategies of battery-ultracapacitor hybrid storage systems for electric vehicles: Review, challenges, and future trends. J. Energy Storage 2022, 53, 105045. [Google Scholar] [CrossRef]
- Ren, G.; Wang, J.; Li, Y.; Zhang, G. Power distribution optimization of a fully active hybrid energy storage system configuration for vehicular applications. J. Ind. Inf. Integr. 2023, 33. [Google Scholar] [CrossRef]
- Zhang, L.; Hu, X.; Wang, Z.; Sun, F.; Deng, J.; Dorrell, D.G. Multiobjective Optimal Sizing of Hybrid Energy Storage System for Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 1027–1035. [Google Scholar] [CrossRef]
- Gunther, S.; Weber, L.; Bensmann, A.L.; Hanke-Rauschenbach, R. Structured Analysis and Review of Filter-Based Control Strategies for Hybrid Energy Storage Systems. IEEE Access 2022, 10, 126269–126284. [Google Scholar] [CrossRef]
- Yu, W.; Jin, Y.; Jiang, Z. Research on the Control Strategy of Hybrid Energy Storage System for Electric Bus. In Proceedings of the 2023 8th Asia Conference on Power and Electrical Engineering, ACPEE 2023, Tianjin, China, 14–16 April 2023; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023; pp. 843–847. [Google Scholar] [CrossRef]
- Yin, H.; Zhou, W.; Li, M.; Ma, C.; Zhao, C. An adaptive fuzzy logic-based energy management strategy on battery/ultracapacitor hybrid electric vehicles. IEEE Trans. Transp. Electrif. 2016, 2, 300–311. [Google Scholar] [CrossRef]
- Eckert, J.J.; Silva, L.C.D.A.; Dedini, F.G.; Correa, F.C. Electric Vehicle Powertrain and Fuzzy Control Multi-Objective Optimization, Considering Dual Hybrid Energy Storage Systems. IEEE Trans. Veh. Technol. 2020, 69, 3773–3782. [Google Scholar] [CrossRef]
- Mesbahi, T.; Rizoug, N.; Bartholomeüs, P.; Sadoun, R.; Khenfri, F.; Le Moigne, P. Optimal energy management for a Li-ion battery/supercapacitor hybrid energy storage system based on a particle swarm optimization incorporating nelder-mead simplex approach. IEEE Trans. Intell. Veh. 2017, 2, 99–110. [Google Scholar] [CrossRef]
- Lu, X.; Wang, H. Optimal Sizing and Energy Management for Cost-Effective PEV Hybrid Energy Storage Systems. IEEE Trans. Ind. Inform. 2020, 16, 3407–3416. [Google Scholar] [CrossRef]
- da Silva, S.F.; Eckert, J.J.; Corrêa, F.C.; Silva, F.L.; Silva, L.C.; Dedini, F.G. Dual HESS electric vehicle powertrain design and fuzzy control based on multi-objective optimization to increase driving range and battery life cycle. Appl. Energy 2022, 324, 119723. [Google Scholar] [CrossRef]
- Yu, S.; Lin, D.; Sun, Z.; He, D. Efficient model predictive control for real-time energy optimization of battery-supercapacitors in electric vehicles. Int. J. Energy Res. 2020, 44, 7495–7506. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, L.; Li, G.; Liu, Y. A real-time energy management control strategy for battery and supercapacitor hybrid energy storage systems of pure electric vehicles. J. Energy Storage 2020, 31, 101721. [Google Scholar] [CrossRef]
- Chen, Z.; Xiong, R.; Cao, J. Particle swarm optimization-based optimal power management of plug-in hybrid electric vehicles considering uncertain driving conditions. Energy 2016, 96, 197–208. [Google Scholar] [CrossRef]
- Seixas, L.D.; Tosso, H.G.; Correa, F.C.; Eckert, J. Particle swarm optimization of a fuzzy controlled hybrid energy storage system—HESS. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference, VPPC 2020, Gijon, Spain, 1–6 November 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Singirikonda, S.; Yeddula Pedda, O. Investigation on performance evaluation of electric vehicle batteries under different drive cycles. J. Energy Storage 2023, 63, 106966. [Google Scholar] [CrossRef]
- Barlow, T.J.; Latham, S.; Mccrae, I.S.; Boulter, P.G. A Reference Book of Driving Cycles for Use in the Measurement of Road Vehicle Emissions; TRL Published Project Report; TRL: Crowthorne, UK, 2009. [Google Scholar]
- Anthony, F.; Irwin. Motor Controller. Available online: https://adv-vehicle-sim.sourceforge.net/motor_controller.html (accessed on 4 March 2023).
- Ye, K.; Li, P.; Li, H. Optimization of Hybrid Energy Storage System Control Strategy for Pure Electric Vehicle Based on Typical Driving Cycle. Math. Probl. Eng. 2020, 2020, 1365195. [Google Scholar] [CrossRef]
- Zhu, T. Energy Management and Sizing of a Dual Energy Storage System for Electric Vehicles. Ph.D. Thesis, University of Southampton, Southampton, UK, 2021. [Google Scholar]
- Liang, J.J.; Suganthan, P.N. Dynamic multi-swarm particle swarm optimizer with local search. In Proceedings of the 2005 IEEE Congress on Evolutionary Computation, IEEE CEC 2005, Edinburgh, UK, 2–5 September 2005; Volume 1, pp. 522–528. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Dynamics | |
|---|---|
| Parameter | Value |
| Frontal area, A (m2) | 2.0379 |
| Air density, (kg/m3) | 1.2 |
| Drag coefficient, | 0.19 |
| Gravitational acceleration, g (m/s2) | 9.81 |
| Total mass (kg) | 1487 |
| Vehicle wheelbase (m) | 2.5121 |
| Gear ratio | 10 |
| Number of gears | 1 |
| Rolling resistance coefficient, | 0.0068 |
| Traction Motor Drive | |
|---|---|
| Parameters | Value |
| Efficiency | 0.9098 |
| Mass of motor (kg) | 91 |
| Max. current (A) | 480 |
| Max. voltage (V) | 120 |
| Rated power (kW) | 75 |
| Parameters/Values | Battery | Ultracapacitor |
|---|---|---|
| Minimum cell voltage (V) | 2 | 0 |
| Maximum cell voltage (V) | 3.9 | 2.5 |
| Nominal voltage of pack (V) | 192 | 175 |
| Cell test temp. (degree Celsius) | 0–41 | 0–40 |
| Nominal capacity | 6 Ah | 2500 F |
| Number of series modules | 18 | 140 |
| Number of parallel modules | 2 | 4 |
| Battery Variable | Unoptimized EMS | Optimized EMS |
|---|---|---|
| Temperature | 31 °C | 25.5 °C |
| Peak current | 240 A | 116.3 A |
| Maximum power delivered | 38.3 kW | 21.1 kW |
| Capacity fade | 50.9% | 45.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Omakor, J.; Alzayed, M.; Chaoui, H. Particle Swarm-Optimized Fuzzy Logic Energy Management of Hybrid Energy Storage in Electric Vehicles. Energies 2024, 17, 2163. https://doi.org/10.3390/en17092163
Omakor J, Alzayed M, Chaoui H. Particle Swarm-Optimized Fuzzy Logic Energy Management of Hybrid Energy Storage in Electric Vehicles. Energies. 2024; 17(9):2163. https://doi.org/10.3390/en17092163
Chicago/Turabian StyleOmakor, Joseph, Mohamad Alzayed, and Hicham Chaoui. 2024. "Particle Swarm-Optimized Fuzzy Logic Energy Management of Hybrid Energy Storage in Electric Vehicles" Energies 17, no. 9: 2163. https://doi.org/10.3390/en17092163
APA StyleOmakor, J., Alzayed, M., & Chaoui, H. (2024). Particle Swarm-Optimized Fuzzy Logic Energy Management of Hybrid Energy Storage in Electric Vehicles. Energies, 17(9), 2163. https://doi.org/10.3390/en17092163