
Research on Fuel Economy of Hydro-Mechanical Continuously Variable Transmission Rotary-Tilling Tractor

Abstract
1. Introduction
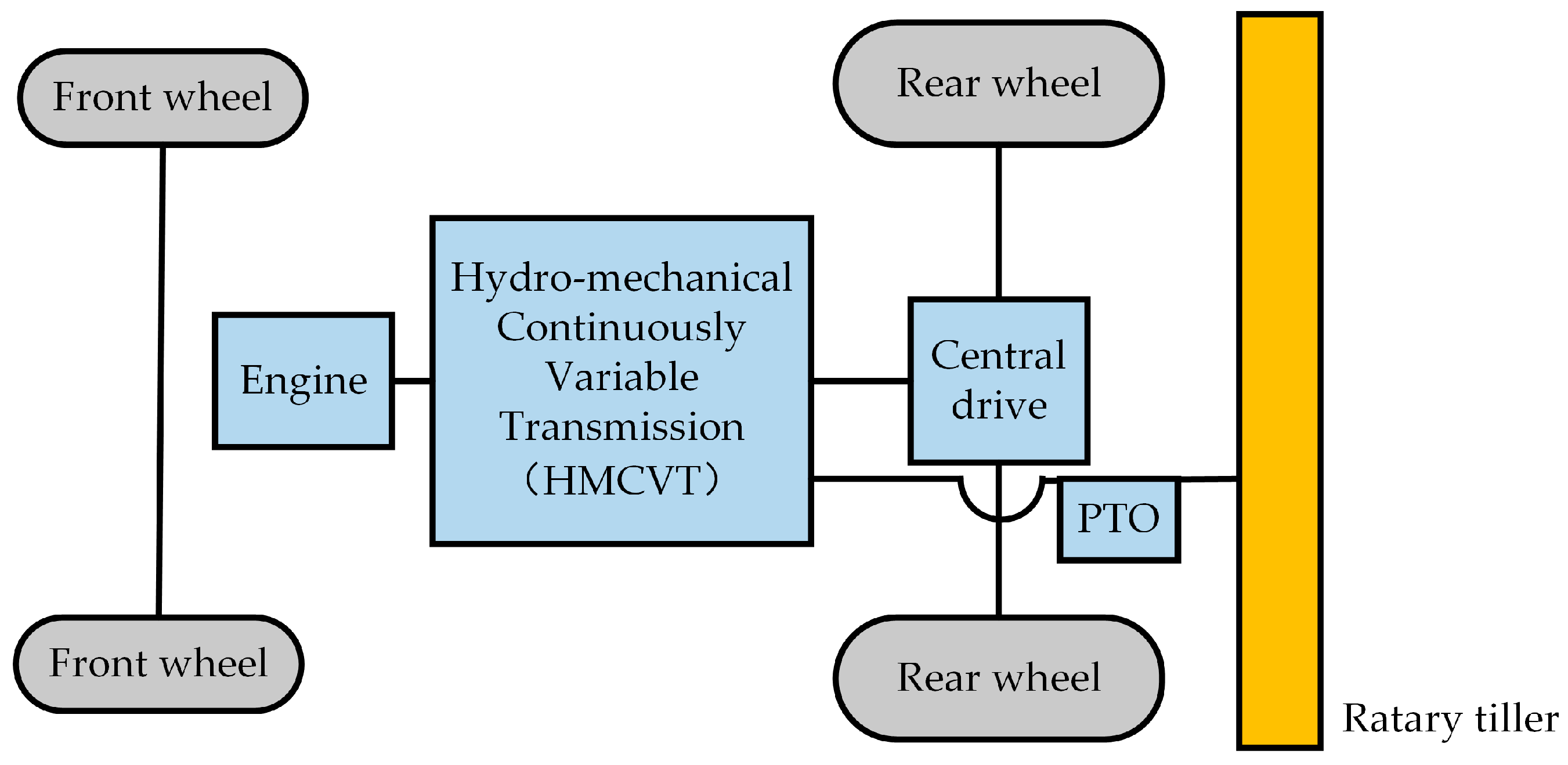
2. Transmission System Model of Rotary-Tilling Tractor
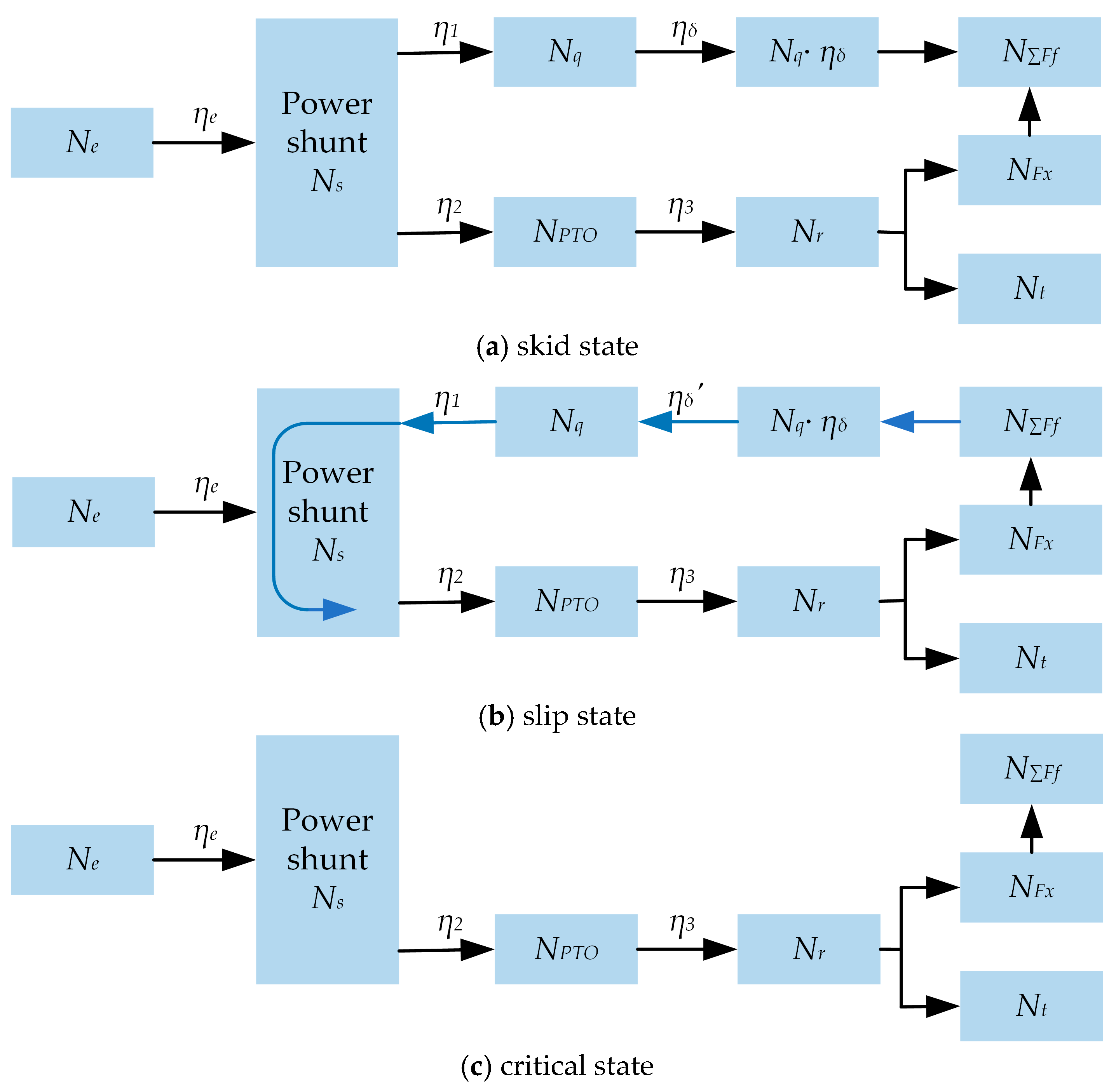
- (1)
- When the horizontal thrust Fx of the rotary tiller is less than the total forward resistance Ff of the unit, the drive wheels require only a minimal driving force Fq to move the unit forward, resulting in a slight skid of the driving wheels.
- (2)
- When the horizontal thrust Fx exceeds the total forward resistance Ff, the driving force of the drive wheels drops below zero, resulting in a “braking force” Fb. In this case, the drive wheels function as braking wheels and experience slip.
- (3)
- When the horizontal thrust Fx equals the total forward resistance Ff of the unit, the unit is driven forward solely by the horizontal component of the rotary tiller’s force, placing it in a critical state of either no skid or slip. These three operating states are described by Equation (2).
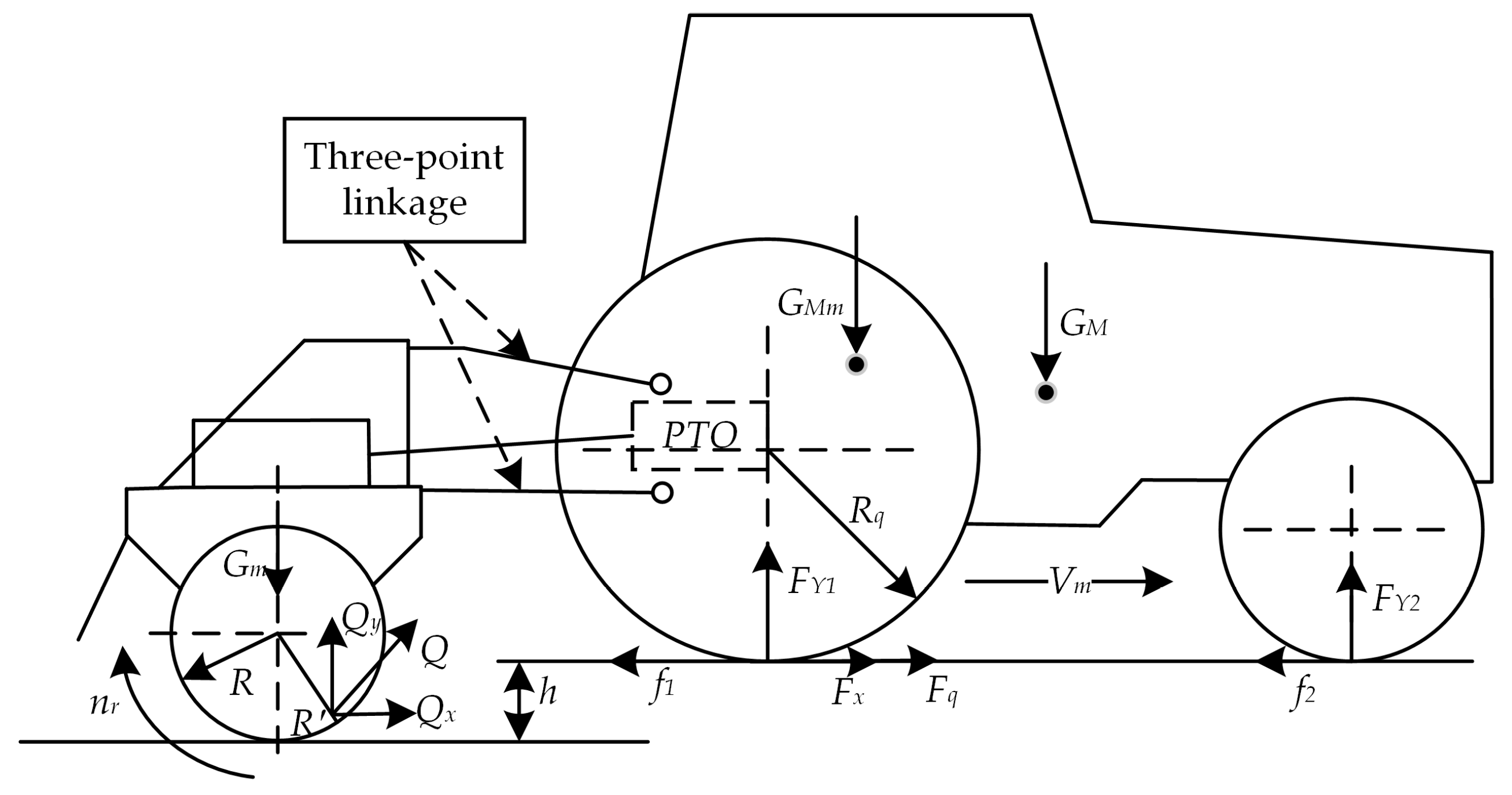
3. Dynamic Model Rotary-Tilling Tractor
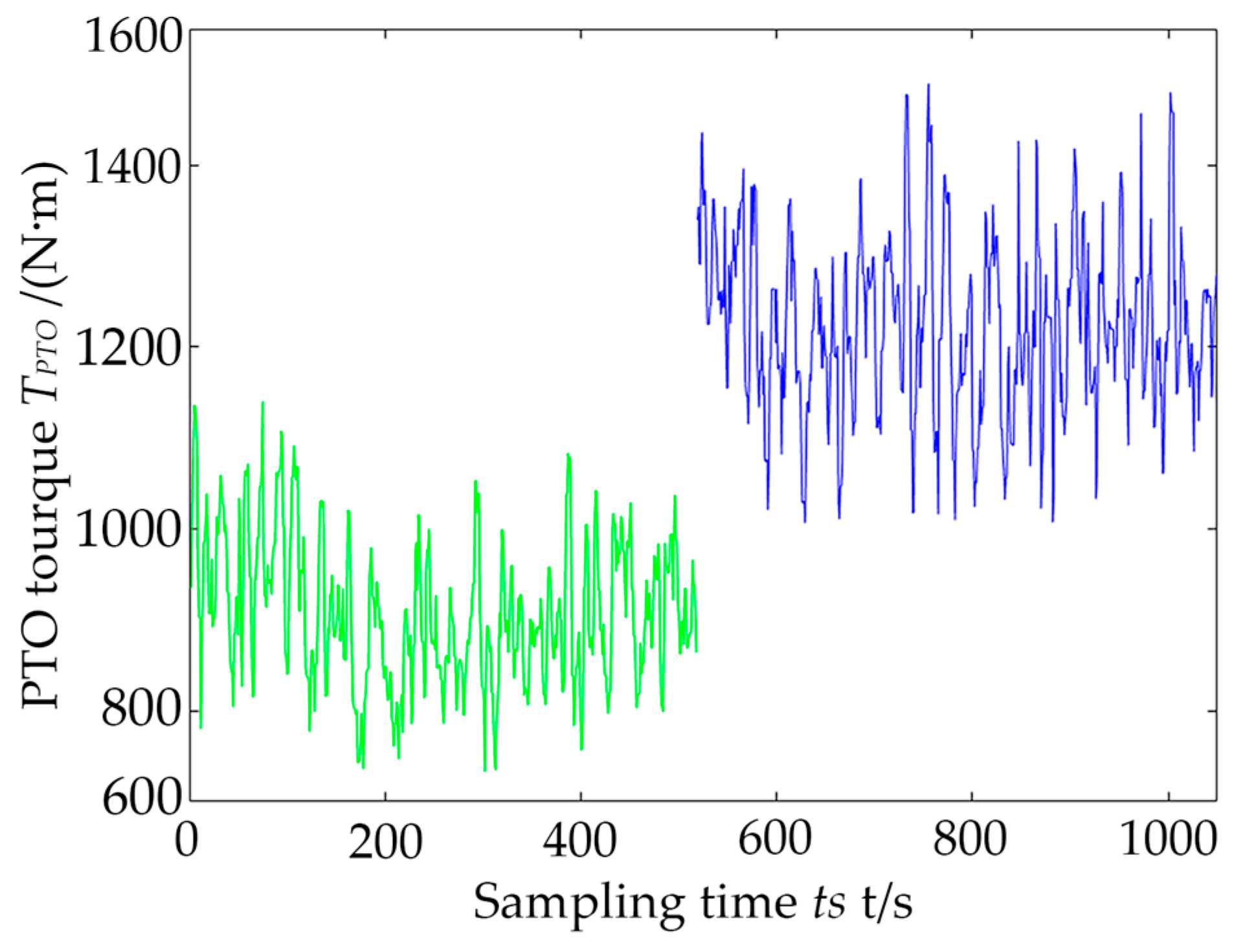
3.1. Dynamic Model of Rotary Tiller
3.2. Soil–Tire Drive Model
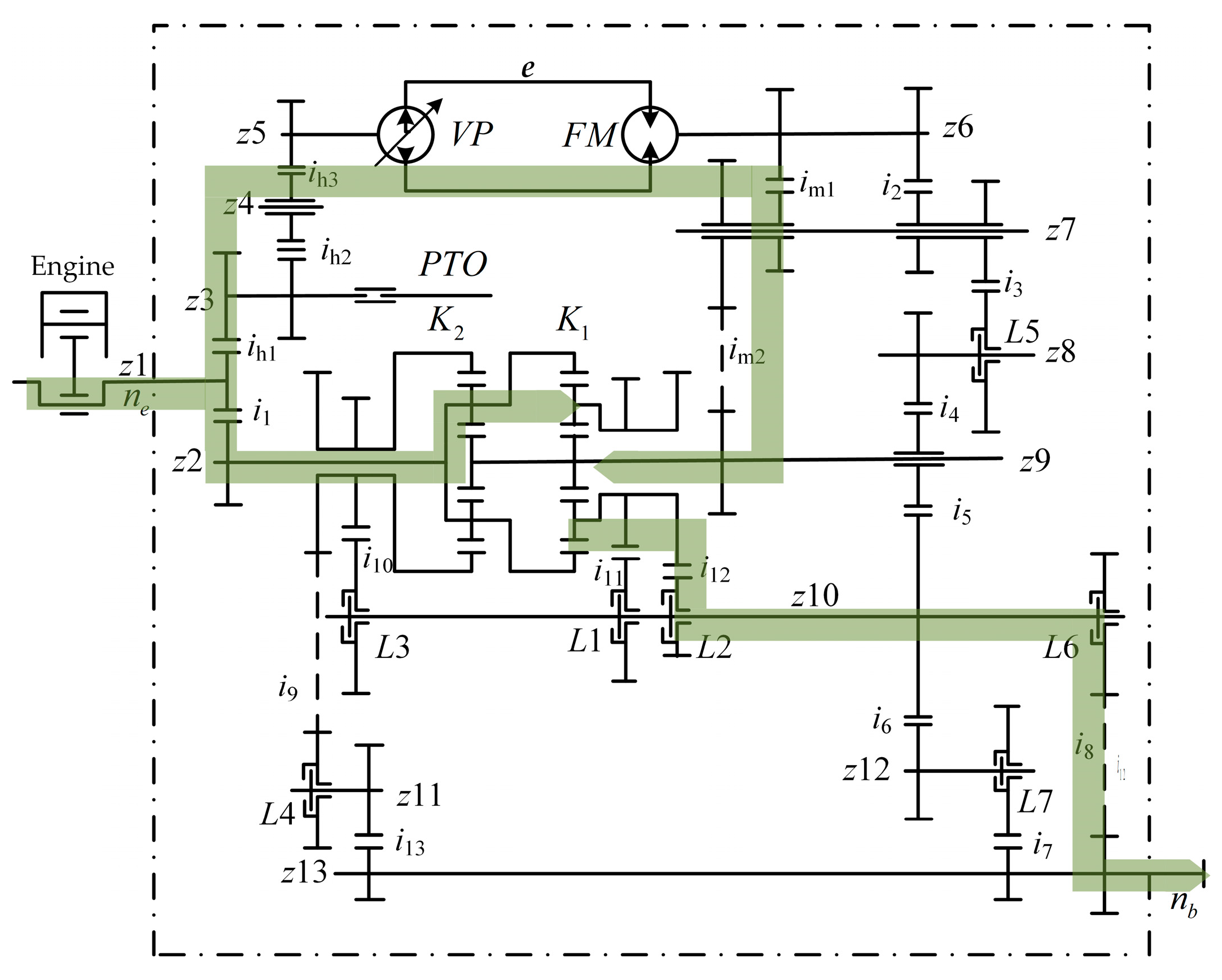
3.3. The Transmission Efficiency Characteristics of Multiple HMCVT Systems
3.4. Efficiency of Traveling Mechanism
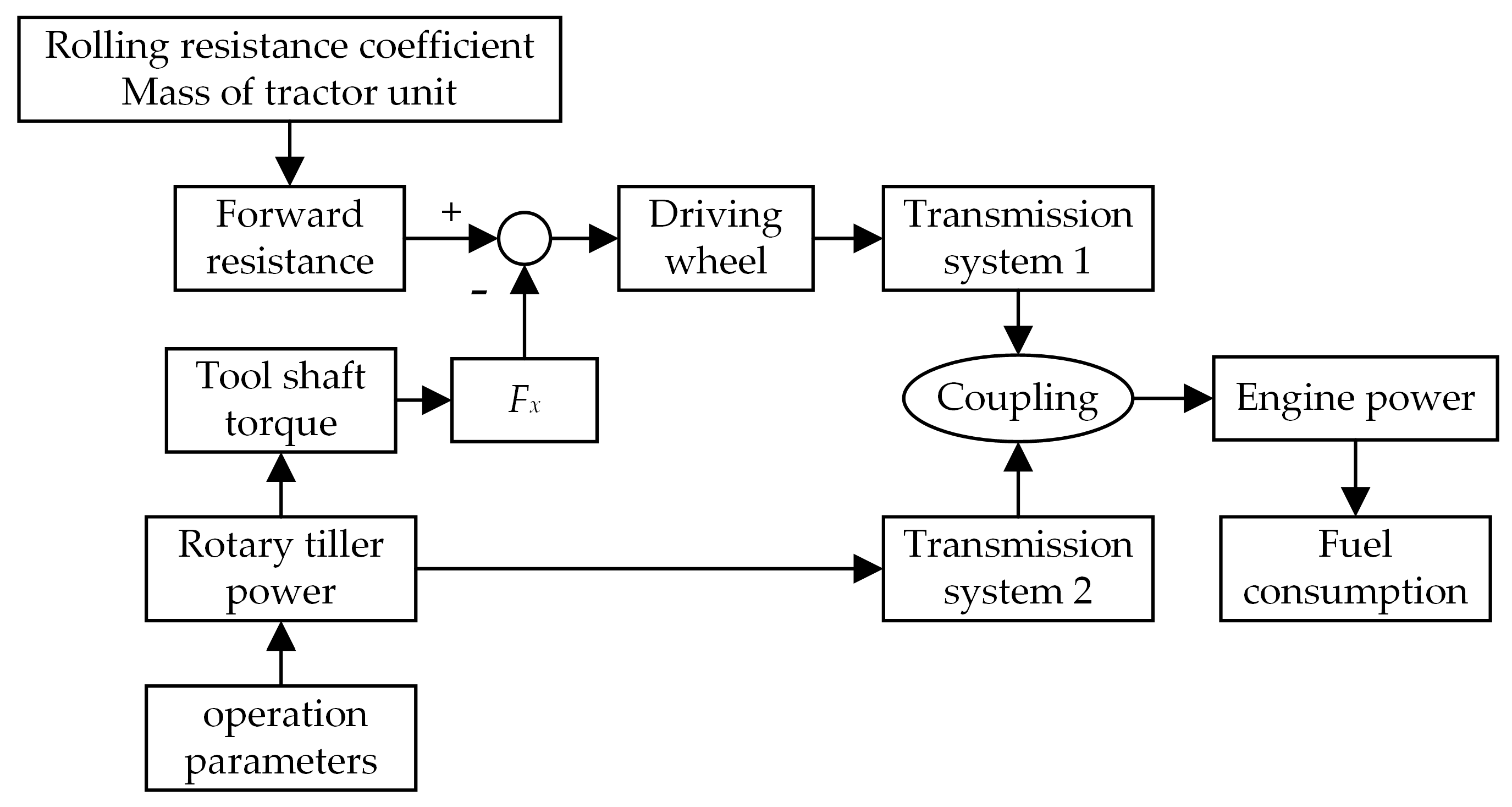
4. Modeling of the Whole Machine Transmission System
4.1. Modeling of the Overall Transmission System of the Rotary-Tilling Tractor
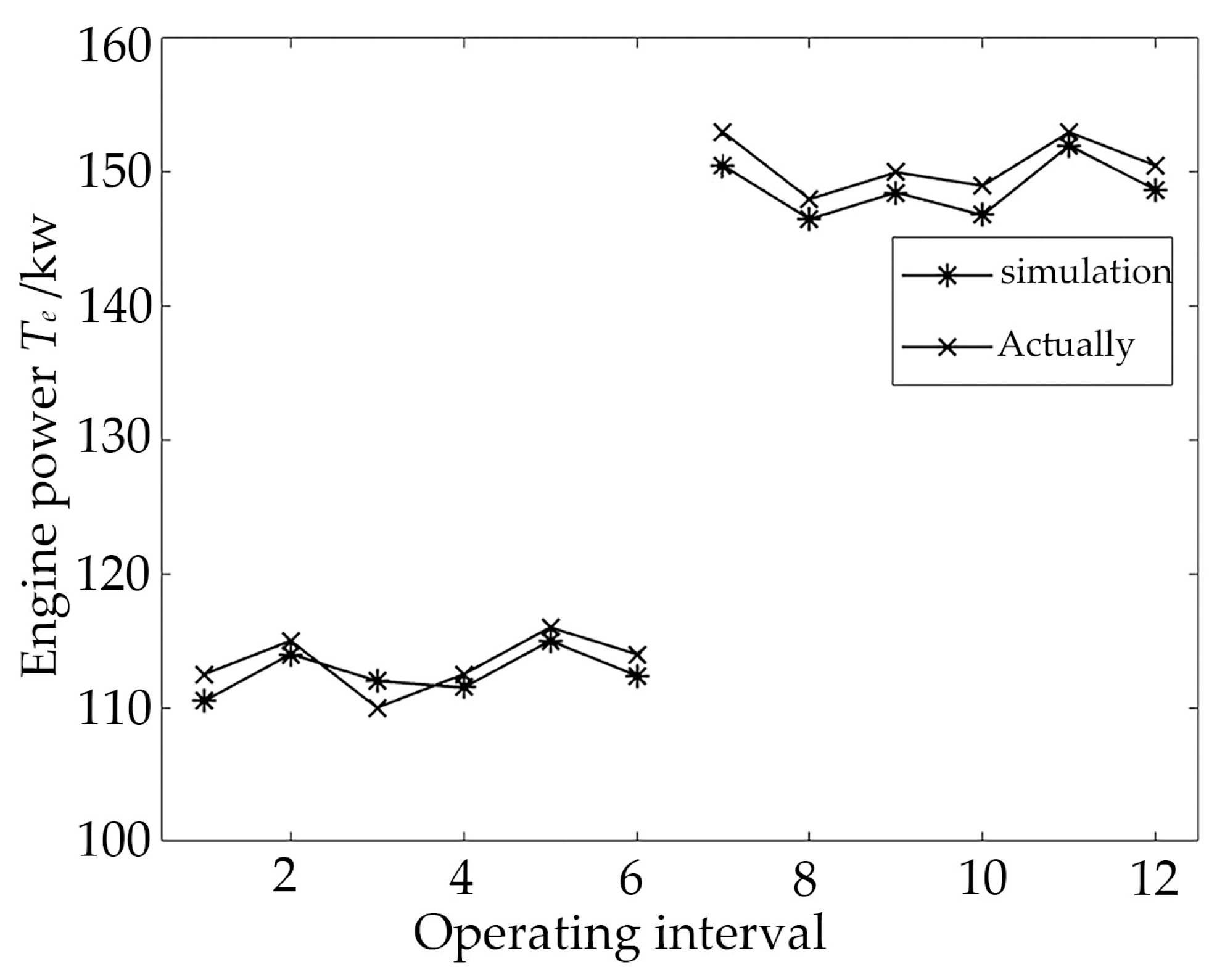
4.2. Model Validation Analysis of the Rotary-Tilling Tractor
5. Fuel Consumption Model of Rotary-Tiller Group
5.1. Fuel Consumption per Unit of Operation for Rotary-Tillage Machinery
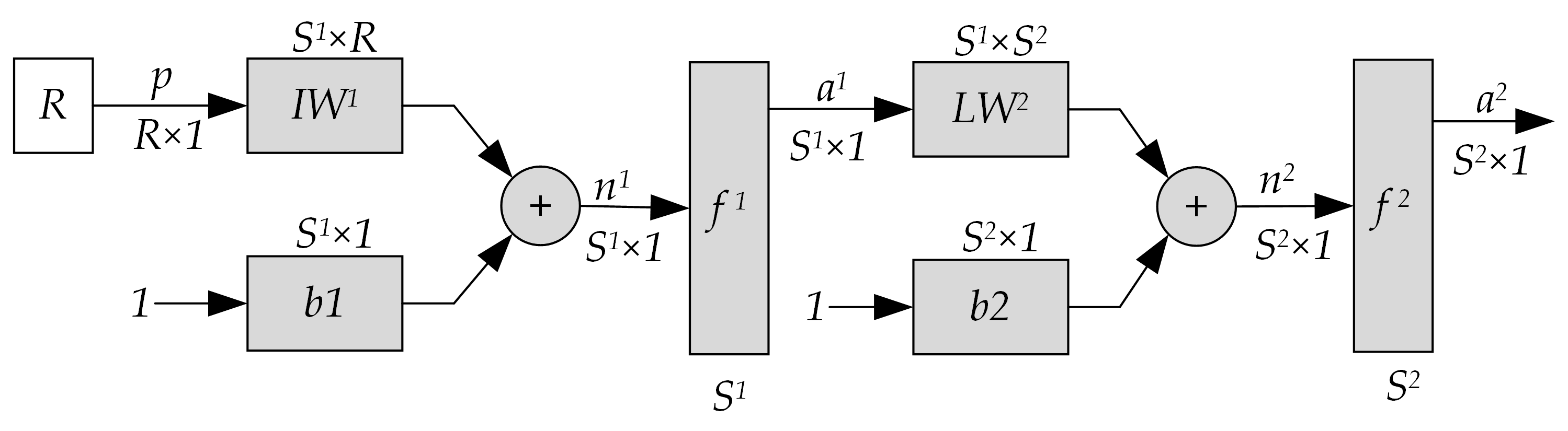
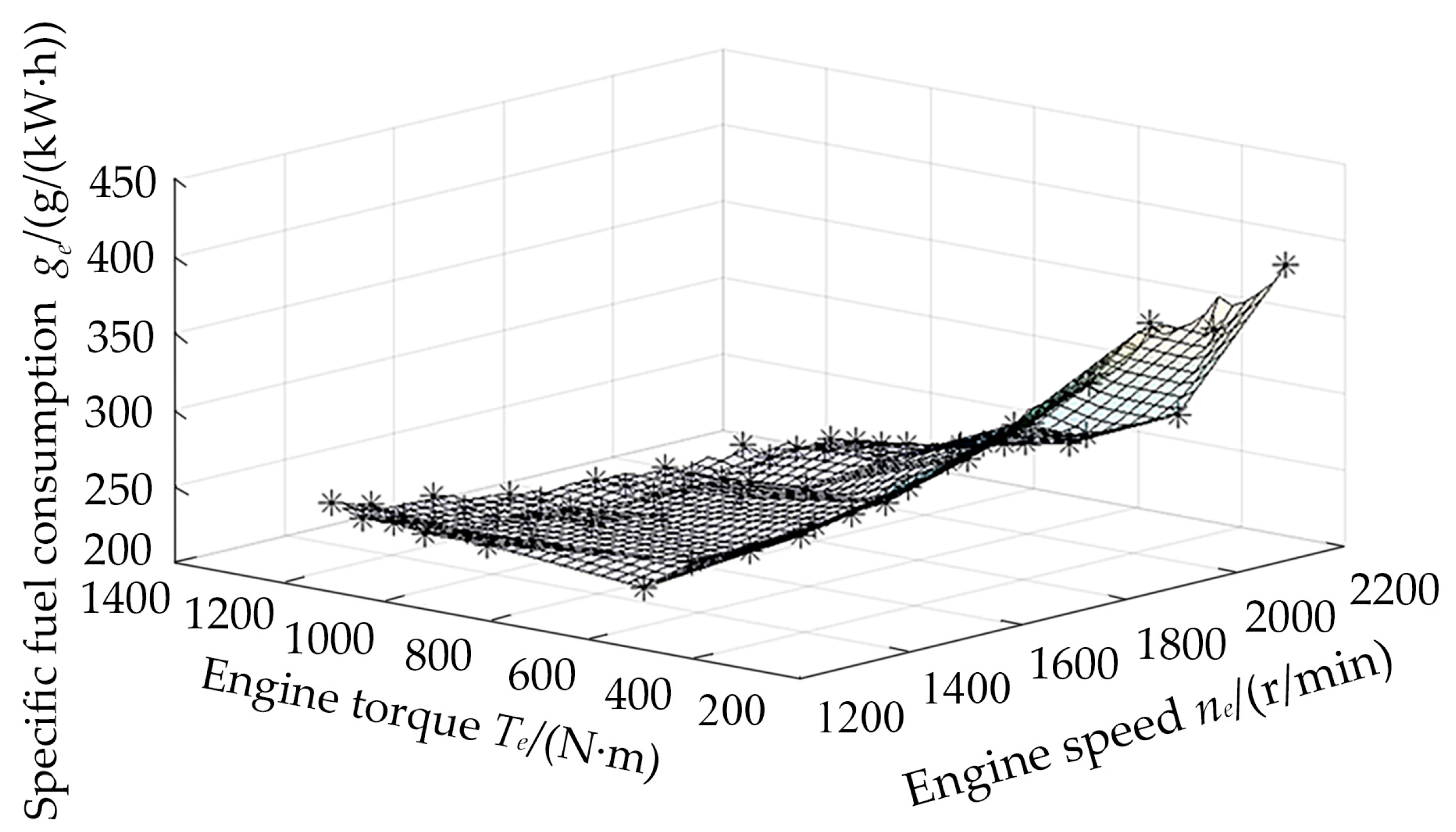
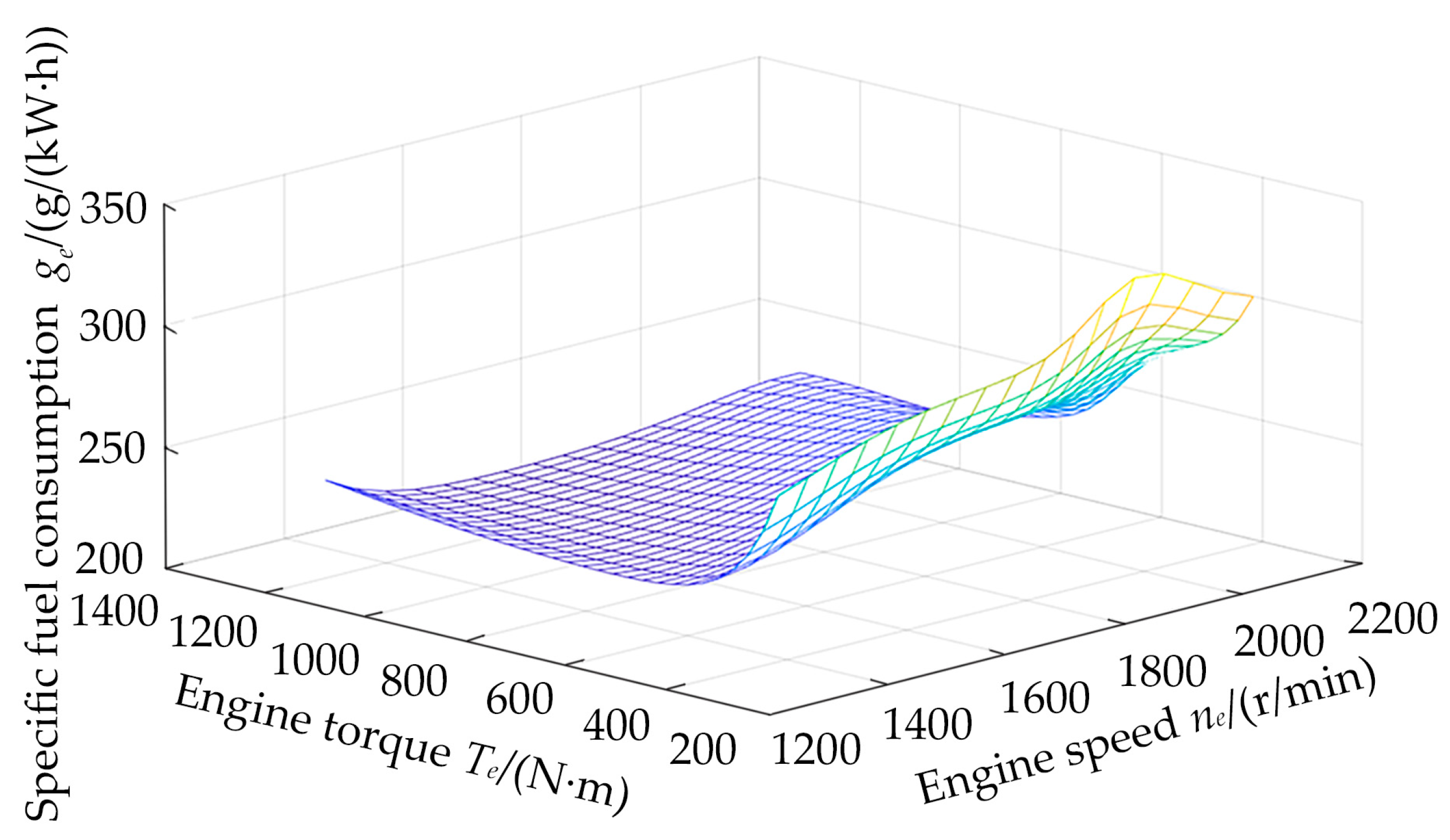
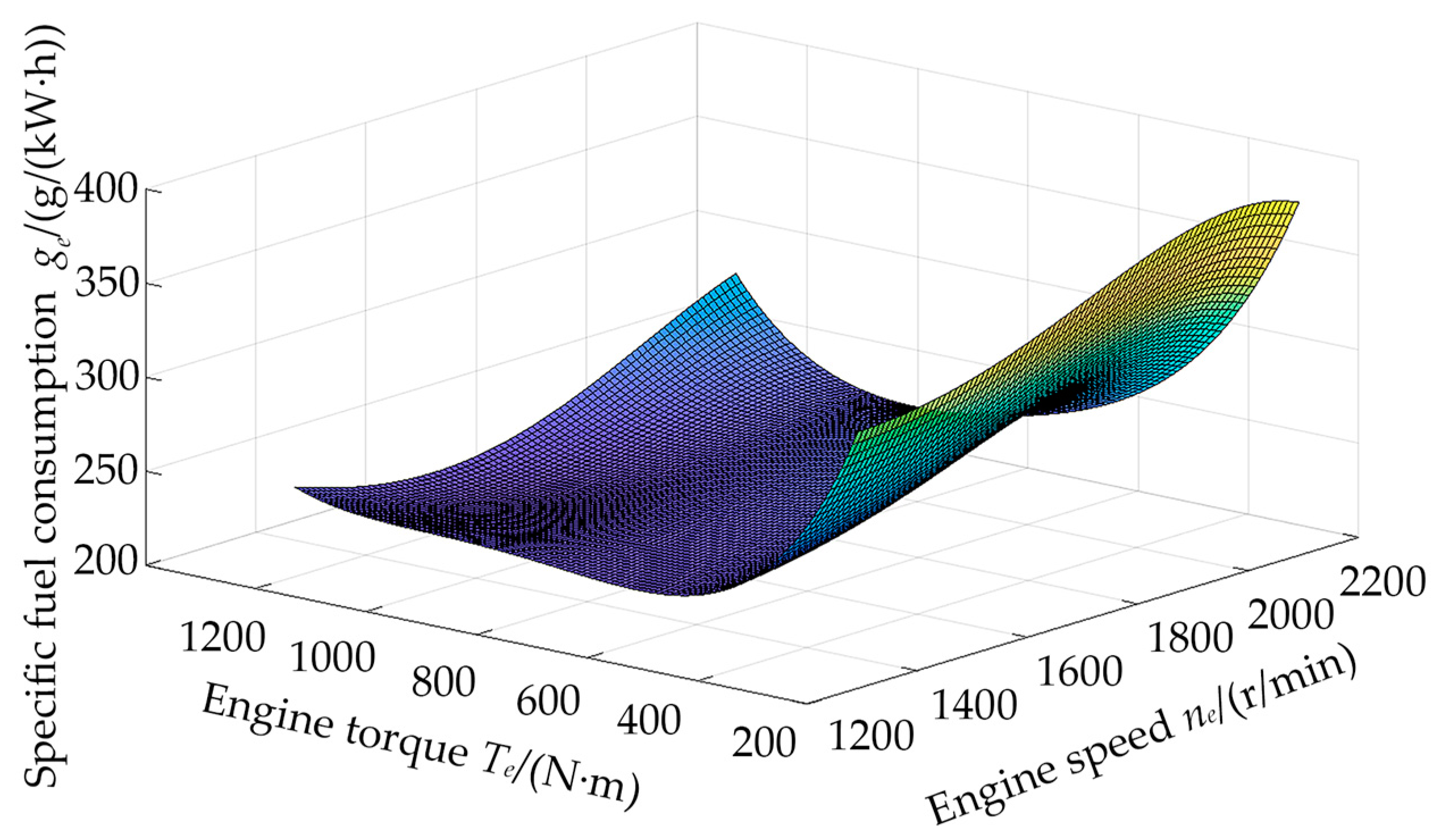
5.2. Mathematical Model of Diesel Engine Fuel Characteristics
6. Results and Analysis of Results
6.1. Fuel Consumption Characteristics of Rotary-Tilling Tractor
6.2. Result Analysis
7. Conclusions
- (1)
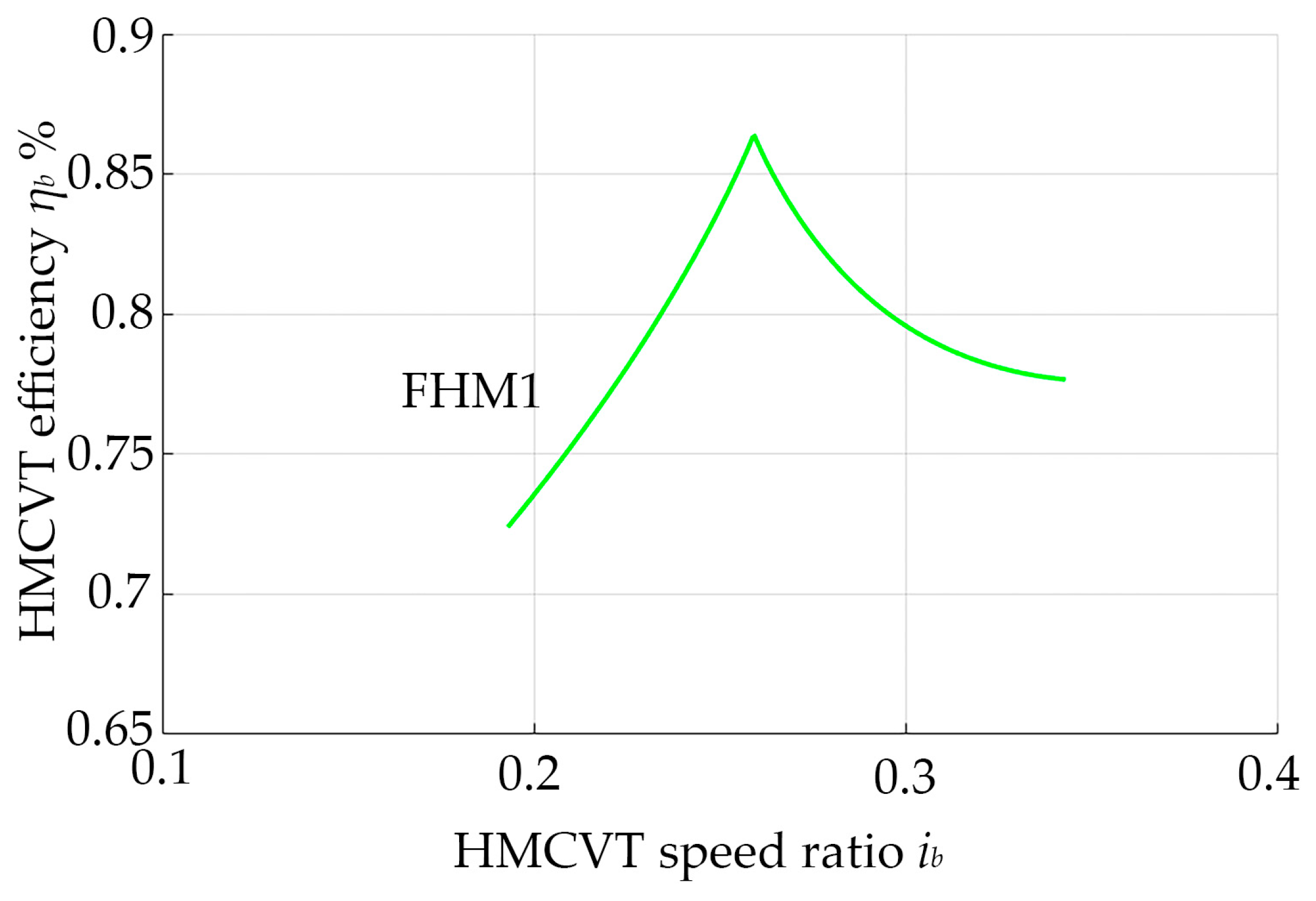
- When the rotary-tilling tractor operates in a soft soil environment, changes in the efficiency of the HMCVT at different speed ratios have a more pronounced impact on both the power characteristics and fuel consumption behavior of the machine. This factor must be carefully considered when developing an accurate dynamic model of the system.
- (2)
- Focusing on the characteristics of the rotary-tilling tractor and considering the dynamic interaction between the rotary tiller, the tractor drive wheels, and the transmission efficiency of the multi-segment HMCVT, the unit dynamic model established using the backward dual-input modeling method accurately captures the relationship between the unit’s travel system, rotary-tillage loads, and engine power consumption. In the analysis of unit productivity, the maximum engine load rate emerges as the most critical factor limiting productivity.
- (3)
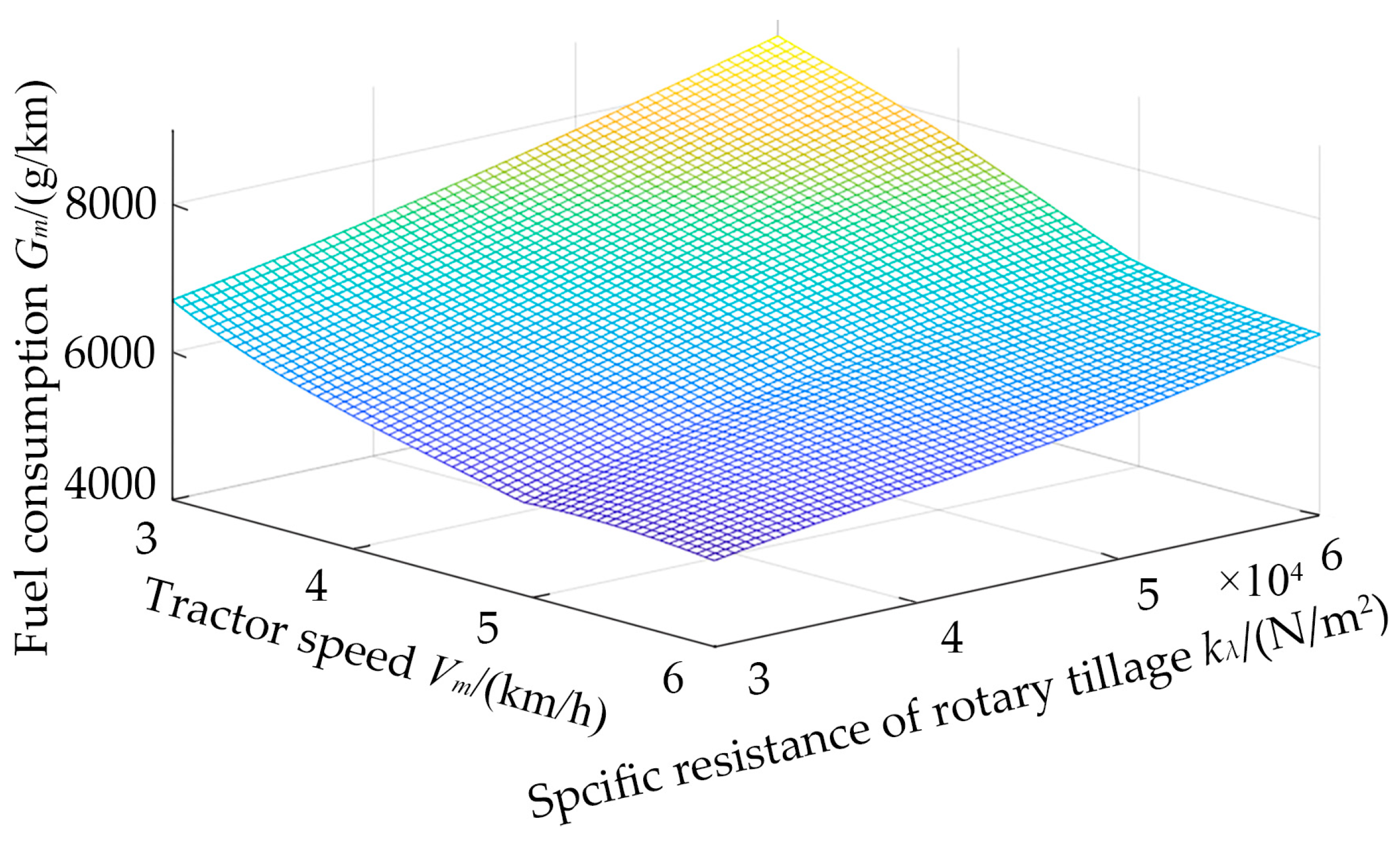
- By introducing the fuel consumption per kilometer of rotary-tillage operation Gm to characterize the fuel consumption characteristics of the rotary-tillage unit, the research findings indicate that increasing the unit’s forward speed leads to a reduction in fuel consumption per kilometer of rotary operation Gm. Therefore, provided a certain work quality is maintained, enhancing the forward speed of the unit simultaneously improves both work efficiency and fuel economy. This provides a theoretical foundation for future research on the variable speed control strategy of rotary-tilling tractors.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mocera, F.; Soma, A.; Martelli, S.; Martini, V. Trends and Future Perspective of Electrification in Agricultural Tractor-Implement Applications. Energies 2023, 16, 6601. [Google Scholar] [CrossRef]
- Xiao, M.; Niu, Y.; Wang, K.; Zhu, Y.; Zhou, J.; Ma, R. Design of Self-Excited Vibrating Its Performance in Reducing Rotary Tiller and Analysis of Torsion and Consumption. Trans. Chin. Soc. Agric. Mach. 2022, 53, 52–63. [Google Scholar]
- Zhang, J.; Feng, G.; Yan, X.; He, Y.; Liu, M.; Xu, L. Cooperative Control Method Considering Efficiency and Tracking Performance for Unmanned Hybrid Tractor Based on Rotary Tillage Prediction. Energy 2024, 288, 129874. [Google Scholar] [CrossRef]
- Yang, H.; Zhou, J.; Qi, Z.; Sun, C.; Lai, G. Research on Rotary Tillage Stability of Greenhouse Electric Tractor Based on Time Series Analysis and Feedforward PID. Trans. Chin. Soc. Agric. Mach. 2024, 55, 412–420. [Google Scholar]
- Kozhushko, A.; Pelypenko, Y.; Mittsel, M.; Veretennikov, I.; Kalnaguz, A.; Trembach, O.; Stanciu, A. Analysing the Response of a Dual-Flow Transmission (HMCVT) for Wheeled Tractors According to Efficiency and Productivity Criteria. Int. J. Mechatron. Appl. Mech. 2024, 16, 33–41. [Google Scholar]
- Zhang, Z.; Li, X.; Peng, Z.; Jing, C.; Yang, S.; Chen, Z. Full-condition efficiency model and power loss analysis of hydro-mechanical CVT. Trans. Chin. Soc. Agric. Eng. 2024, 40, 48–58. [Google Scholar]
- Liang, L.; Li, Q.; Tan, Y.; Yang, Z. Multi-parameter Optimization of HMCVT Fuel Economy Using Parameter Cyclic Algorithm. Trans. Chin. Soc. Agric. Eng. 2023, 39, 48–55. [Google Scholar]
- Huang, X.; Lu, Z.; Chen, L.; Qian, J.; An, Y. Optimization of Tractor HMCVT Target Speed Ratio and Control Simulation Based on Machine Economy. J. Nanjing Agric. Univ. 2022, 45, 777–787. [Google Scholar]
- Ahn, S.; Choi, J.; Kim, S.; Lee, J.; Choi, C.; Kim, H. Development of an Integrated Engine-Hydro-Mechanical Transmission Control Algorithm for a Tractor. Adv. Mech. Eng. 2015, 7, 1–18. [Google Scholar] [CrossRef]
- Cao, F.; Li, W.; Han, Q.; Zhang, M. Switching of the Comprehensive Mode for the Hydro-Mechanical Continuously Variable Transmission of a Tractor. Trans. Chin. Soc. Agric. Eng. 2022, 38, 41–47. [Google Scholar]
- Zhang, J.; Feng, G.; Liu, M.; Yan, X.; Xu, L.; Shang, C. Research on Global Optimal Energy Management Strategy of Agricultural Hybrid Tractor Equipped with CVT. World Electr. Veh. J. 2023, 14, 127. [Google Scholar] [CrossRef]
- Li, B.; Sun, D.; Hu, M.; Liu, J. Research on Economic Comprehensive Control Strategies of Tractor-Planter Combinations in Planting, Including Gear-Shift and Cruise Control. Energies 2018, 11, 686. [Google Scholar] [CrossRef]
- Hu, J.; Zhao, J.; Pan, H.; Liu, W.; Zhao, X. Prediction Model of Double Axis Rotary Power Consumption Based on Discrete Element Method. Trans. Chin. Soc. Agric. Mach. 2020, 51, 9–16. [Google Scholar]
- Mirzaev, B.; Steward, B.; Mamatov, F.; Tekeste, M.; Amonov, M. Analytical Modeling Soil Reaction Forces on Rotary Tiller. In Proceedings of the An ASABE Meeting Presentation, St. Joseph, MI, USA, 12–16 July 2021. [Google Scholar]
- Xiong, P.; Yang, Z.; Sun, Z.; Zhang, Q.; Huang, Y.; Zhang, Z. Simulation Analysis and Experiment for Three-axis Working Resistances of Rotary Blade Based on Discrete Element Method. Trans. Chin. Soc. Agric. Eng. 2018, 34, 113–121. [Google Scholar]
- Patidar, P.; Soni, P.; Jain, A.; Mahore, V. Modelling soil-rotor blade interaction of vertical axis rotary tiller using discrete element method (DEM). J. Terramechanics 2024, 112, 59–68. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, Y.; Li, Z.; Jia, H.; Wan, B. Universal the Blade the Broken Stubble Power Consumption Influence of the Working Parameters of the Rotary Tiller Broken Stubble. J. Jilin Univ. (Eng. Technol. Ed.) 2012, 42, 122–125. [Google Scholar]
- Zhao, H.; Li, Y.; Zeng, Q.; Liu, D. Simulation of Rotary Tiller Based on MATLAB. Journal of Northwest A F Univ. (Nat. Sci. Ed.) 2016, 44, 230–234. [Google Scholar]
- Fang, H.; Ji, C.; Zhang, Q.; Gou, J. Force Analysis of Rotary Blade Based on Distinct Element Method. Trans. Chin. Soc. Agric. Eng. 2016, 32, 54–59. [Google Scholar]
- Luoyang Tractor Research Institute; Ministry of Mechanical and Electronics Industry. Tractor Design Manual, 2nd ed.; China Machine Press: Beijing, China, 1994; pp. 209–216. [Google Scholar]
- Zhao, J.; Liu, M.; Xu, L.; Yu, S.; Xie, P. Prediction Model and Experiment on Tractive Performance of Four-wheel Drive Tractor. Trans. Chin. Soc. Agric. Mach. 2023, 54, 439–447. [Google Scholar]
- Zhang, M.; Wang, J.; Wang, J.; Guo, Z.; Guo, F.; Xi, Z.; Xu, J. Speed Changing Control Strategy for Improving Tractor Fuel Economy. Trans. Chin. Soc. Agric. Eng. 2020, 36, 82–89. [Google Scholar]
- Li, H.; Song, Z.; Xie, B. Plowing Performance Simulation and Analysis for Hybrid Electric Tractor. Appl. Mech. Mater. 2013, 365–366, 505–511. [Google Scholar] [CrossRef]
- Lee, H.; Kim, J.; Park, Y.; Cha, S. Rule-Based Power Distribution in the Power Train of a Parallel Hybrid Tractor for Fuel Savings. Int. J. Precis. Eng. Manuf.-Green Technol. 2016, 3, 231–237. [Google Scholar] [CrossRef]
- Li, Q.; Jia, W. Phase Selection and Location Method of Generator Stator Winding Ground Fault Based on BP Neural Network. Energies 2023, 16, 1503. [Google Scholar] [CrossRef]
- Lu, Q.; Su, K.; Zhang, J.; Yan, T.; Yang, B.; Zhang, H. Structural Optimization of Simple Catenary Based on BP Neural Network and Genetic Algorithm. J. Mech. Eng. 2024, 60, 313–320. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value (Unit) |
|---|---|---|
| tractor | Maximum usable mass | 14,000 (kg) |
| Rated power | 228 (kW) | |
| Rated speed | 2100 (r/min) | |
| Rated torque | 1200 (N·m) | |
| Rated tractive effort | 60 (kN) | |
| Transmission shift | 5F + 4R | |
| PTO rated speed | 540/1000 (r/min) | |
| PTO Rated power | 190 (kW) | |
| Main transmission ratio | 36.348 | |
| rotary tiller | Rated power | 240 (kW) |
| Operation wide | 4.5 (m) | |
| operation depth | 12~26 (cm) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Wang, N.; Zhou, S. Research on Fuel Economy of Hydro-Mechanical Continuously Variable Transmission Rotary-Tilling Tractor. Energies 2025, 18, 1490. https://doi.org/10.3390/en18061490
Zhang M, Wang N, Zhou S. Research on Fuel Economy of Hydro-Mechanical Continuously Variable Transmission Rotary-Tilling Tractor. Energies. 2025; 18(6):1490. https://doi.org/10.3390/en18061490
Chicago/Turabian StyleZhang, Mingzhu, Ningning Wang, and Sikang Zhou. 2025. "Research on Fuel Economy of Hydro-Mechanical Continuously Variable Transmission Rotary-Tilling Tractor" Energies 18, no. 6: 1490. https://doi.org/10.3390/en18061490
APA StyleZhang, M., Wang, N., & Zhou, S. (2025). Research on Fuel Economy of Hydro-Mechanical Continuously Variable Transmission Rotary-Tilling Tractor. Energies, 18(6), 1490. https://doi.org/10.3390/en18061490