
An Improved Dynamic Matrix Control Algorithm and Its Application in Cold Helium Temperature Control of a Modular High-Temperature Gas-Cooled Reactor (mHTGR)



Abstract
1. Introduction
2. Design of Dynamic Matrix Controller
3. Stability Analysis and Improvement
3.1. Proof of Stability
3.2. Robustness Improvement
4. Application, Simulation, and Discussions
4.1. Application
4.2. Simulation
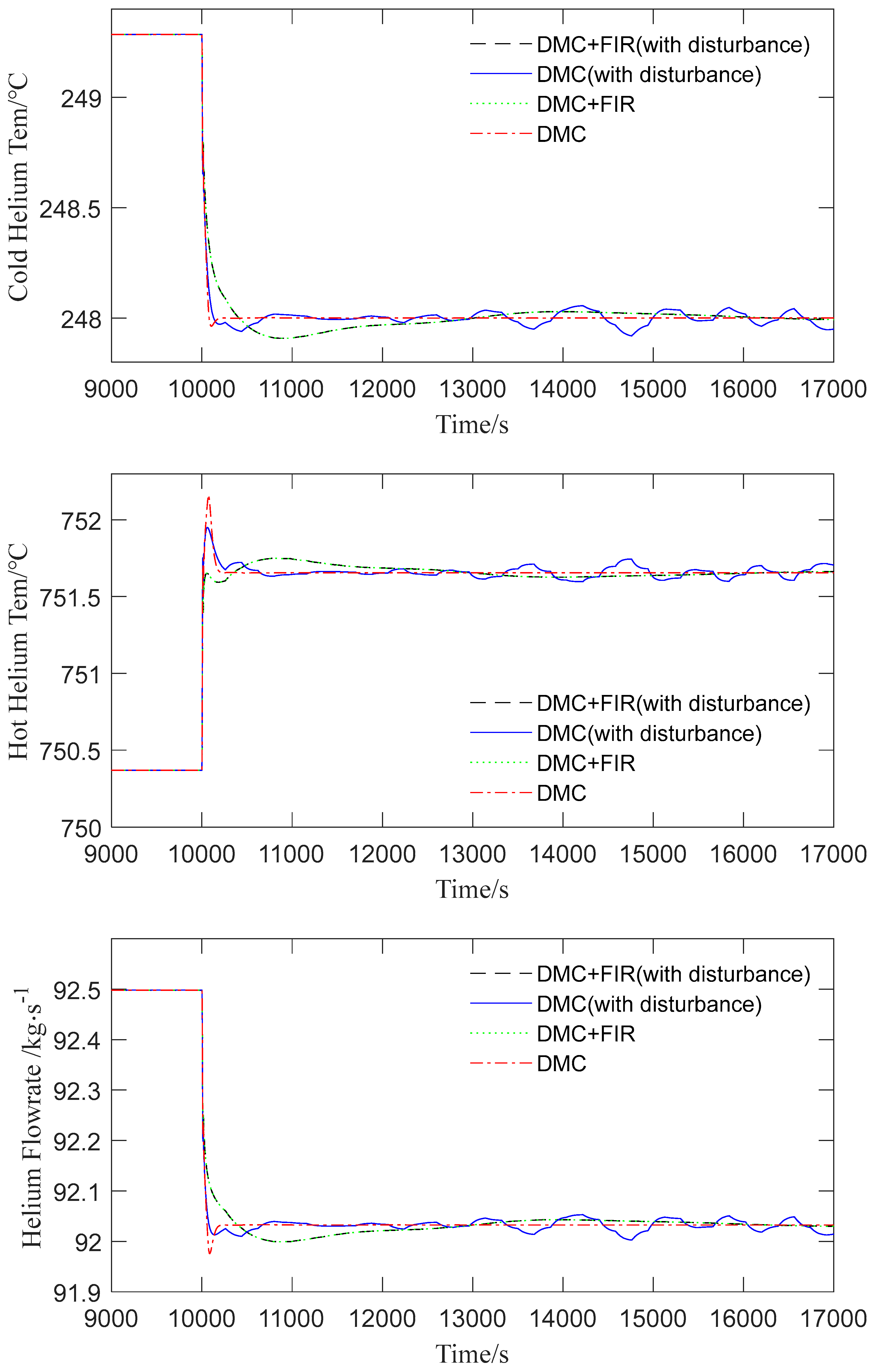
- (1)
- Step response coefficients unaffected by measurement noise, employing the conventional DMC method;
- (2)
- Step response coefficients unaffected by measurement noise, using the improved DMC method;
- (3)
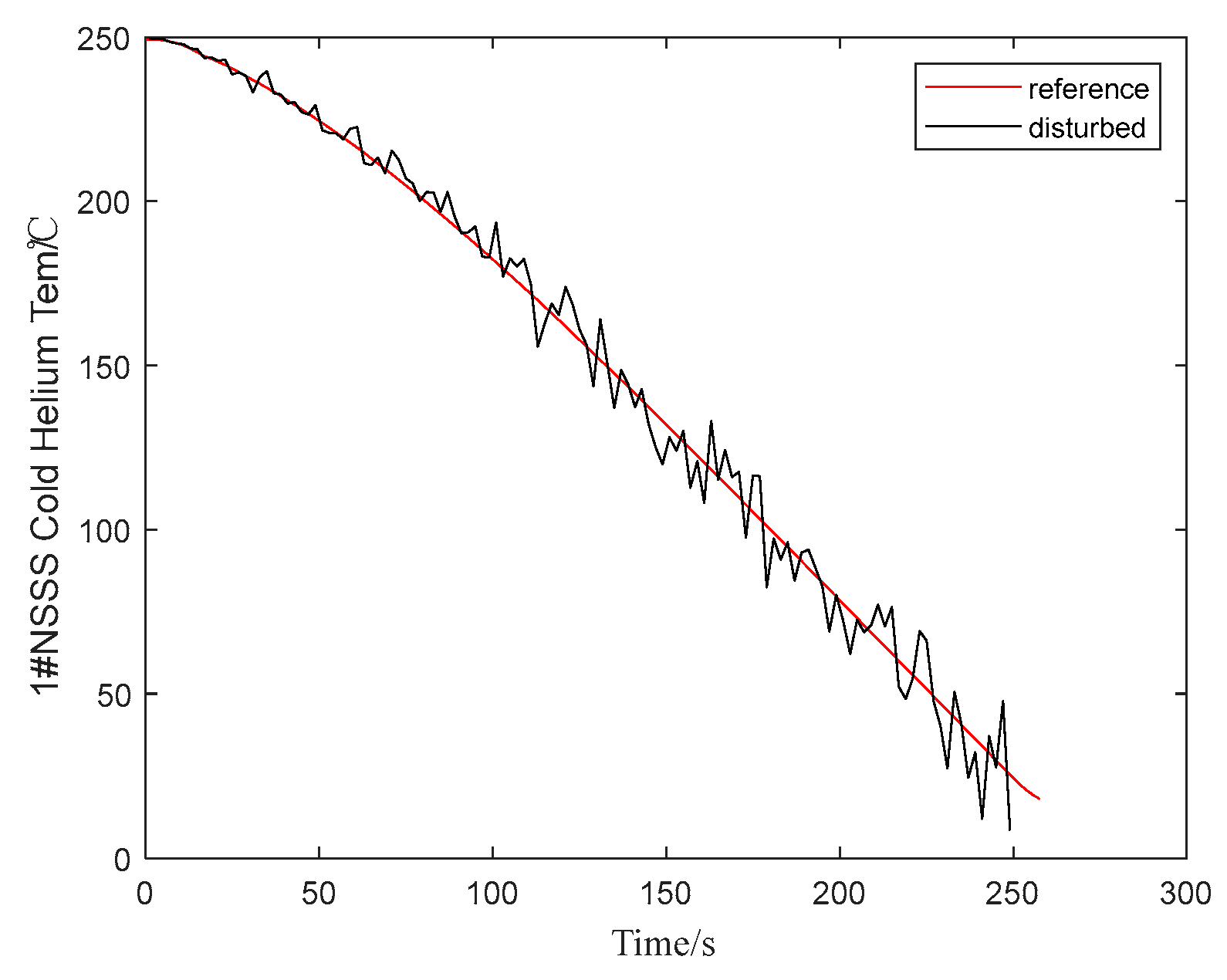
- Step response coefficients affected by measurement noise, employing the conventional DMC method;
- (4)
- Step response coefficients affected by measurement noise, using the improved DMC method.
4.3. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cutler, C.R.; Ramaker, B.L. Dynamic Matrix controlA Computer Control Algorithm. In Proceedings of the 1980 Joint Automatic Control Conference, San Francisco, CA, USA, 13–15 August 1980. [Google Scholar]
- Richalet, J.; Rault, A.; Testud, J.; Papon, J. Model Predictive Heuristic Control—Applications to Industrial Process. Automatica 1978, 14, 413–428. [Google Scholar] [CrossRef]
- Garcia, C.; Prett, D.; Morari, M. Model Predictive Control—Theory and Practice—Survy. Automatica 1989, 25, 335–348. [Google Scholar] [CrossRef]
- Qin, S.J.; Badgwell, T.A. A Survey of Industrial Model Predictive Control Technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Nikravesh, M.; Farell, A.E.; Lee, C.T.; Van Zee, J.W. Dynamic Matrix Control of Diaphragm-Type Chlorine/Caustic Electrolysers. J. Process Control 1995, 5, 131–136. [Google Scholar] [CrossRef]
- Moon, U.-C.; Lee, Y.; Lee, K.Y. Practical Dynamic Matrix Control for Thermal Power Plant Coordinated Control. Control Eng. Pract. 2018, 71, 154–163. [Google Scholar] [CrossRef]
- Na, M.G.; Belle, X.X.; Upadhyaya, R.; Hwang, I.J. Design of a Model Predictive Power Controller for an SP-100 Space Reactor. Nucl. Sci. Eng. 2006, 154, 353–366. [Google Scholar] [CrossRef]
- Townsend, S.; Lightbody, G.; Brown, M.D.; Irwin, G.W. Nonlinear Dynamic Matrix Control Using Local Models. Trans. Inst. Meas. Control 1998, 20, 47–56. [Google Scholar] [CrossRef]
- Zhao, Z.; Xia, X.; Wang, J.; Gu, J.; Jin, Y. Nonlinear Dynamic Matrix Control Based on Multiple Operating Models. J. Process Control 2003, 13, 41–56. [Google Scholar] [CrossRef]
- Lee, J.; Morari, M.; Garcia, C. State-space interpretation of model-predictive control. Automatica 1994, 30, 707–717. [Google Scholar] [CrossRef]
- Jiang, D.; Dong, Z.; Liu, M.; Huang, X. Dynamic Matrix Control for the Thermal Power of MHTGR-Based Nuclear Steam Supply System. Energies 2018, 11, 2651. [Google Scholar] [CrossRef]
- Maiti, S.N.; Saraf, D.N. Adaptive Dynamic Matrix Control of a Distillation Column with Closed-Loop Online Identification. J. Process Control 1995, 5, 315–327. [Google Scholar] [CrossRef]
- Xu, X.; Simkoff, J.M.; Baldea, M.; Chiang, L.H.; Castillo, I.; Bindlish, R.; Ashcraft, B. Data-Driven Plant-Model Mismatch Estimation for Dynamic Matrix Control Systems. Int. J. Robust Nonlinear Control 2020, 30, 7103–7129. [Google Scholar] [CrossRef]
- Ding, Z.; Yang, Z.; Chen, C.; Chen, W.; Chen, H.; Liu, Z. Improved Sliding Mode Dynamic Matrix Control Strategy: Application on Spindle Loading and Precision Measuring Device Based on Piezoelectric Actuator. Mech. Syst. Signal Process. 2022, 167, 108543. [Google Scholar] [CrossRef]
- Na, M.G.; Hwang, I.J.; Lee, Y.J. Design of a Fuzzy Model Predictive Power Controller for Pressurized Water Reactors. IEEE Trans. Nucl. Sci. 2006, 53, 1504–1514. [Google Scholar]
- Chi, X.; Zhao, S.; Jia, X.; Hou, P. Fuzzy Dynamic Matrix Predictive Control of Ammonia Injection Quantityin SCR Denitration Systems. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 2494–2499. [Google Scholar]
- Temeng, K.O.; Schnelle, P.D.; McAvoy, T.J. Model Predictive Control of an Industrial Packed Bed Reactor Using Neural Networks. J. Process Control 1995, 5, 19–27. [Google Scholar] [CrossRef]
- Wang, L.; Cai, Y.; Zan, X. Distributed Double-Layered Dynamic Matrix Control for Large-Scale System. Math. Probl. Eng. 2022, 2022, 4650342. [Google Scholar] [CrossRef]
- Wang, D.; Zou, H.; Tao, J. A New Design of Fractional-Order Dynamic Matrix Control with Proportional–Integral–Derivative-Type Structure. Meas. Control 2019, 52, 567–576. [Google Scholar] [CrossRef]
- Teng, Y.; Li, H.; Wu, F. Design of Distributed Fractional Order PID Type Dynamic Matrix Controller for Large-Scale Process Systems. IEEE Access 2020, 8, 179754–179771. [Google Scholar] [CrossRef]
- Zou, H.; Wang, L. An Improved Constrained Dynamic Matrix Control for Temperature in an Industrial Coke Furnace. Meas. Control 2019, 52, 409–417. [Google Scholar] [CrossRef]
- Krener, A.J. Adaptive Horizon Model Predictive Regulation⁎. IFAC-Pap. 2018, 51, 54–59. [Google Scholar] [CrossRef]
- Jiang, D.; Dong, Z. Practical Dynamic Matrix Control of MHTGR-Based Nuclear Steam Supply Systems. Energy 2019, 185, 695–707. [Google Scholar] [CrossRef]
- Jiang, D.; Dong, Z. Dynamic Matrix Control for Thermal Power of Multi-Modular High Temperature Gas-Cooled Reactor Plants. Energy 2020, 198, 117386. [Google Scholar] [CrossRef]
- Ma, W.; Wang, S. Robustness of SISO Dynamic Matrix Control. J. Tsinghua Univ. Sci. Technol. 2002, 42, 1276–1280. [Google Scholar]
- Garcia, C.E.; Morari, M. Internal Model Control. A Unifying Review and Some New Results. Ind. Eng. Chem. Process Des. Dev. 1982, 21, 308–323. [Google Scholar] [CrossRef]
- Santos, T.L.M.; Normey-Rico, J.E. A Generalised Dynamic Matrix Control for Unstable Processes Based on Filtered Predictions. ISA Trans. 2023, 136, 297–307. [Google Scholar] [CrossRef]
- Xing, Y.; Zhang, G.; Yu, H.; Yang, J. Optimization and Simulation of Multivariable Dynamic Matrix Control. Comput. Eng. Sci. 2019, 41, 1285–1290. [Google Scholar]
- Tohidi, S.S.; Calì, D.; Madsen, H. Adaptive Model Predictive Controller for Building Thermal Dynamics. IEEE Control Syst. Lett. 2024, 8, 1325–1330. [Google Scholar] [CrossRef]
- Li, Z.; Wang, F.; Ke, D.; Li, J.; Zhang, W. Robust Continuous Model Predictive Speed and Current Control for PMSM With Adaptive Integral Sliding-Mode Approach. IEEE Trans. Power Electron. 2021, 36, 14398–14408. [Google Scholar] [CrossRef]
- Climente-Alarcon, V.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Vlcek, M. Induction Motor Diagnosis by Advanced Notch FIR Filters and the Wigner–Ville Distribution. IEEE Trans. Ind. Electron. 2014, 61, 4217–4227. [Google Scholar] [CrossRef]
- Dong, Z.; Pan, Y.; Zhang, Z.; Dong, Y.; Huang, X. Dynamical Modeling and Simulation of the Six-Modular High Temperature Gas-Cooled Reactor Plant HTR-PM600. Energy 2018, 155, 971–991. [Google Scholar] [CrossRef]
- Dong, Z.; Pan, Y.; Huang, X.; Dong, Y.; Zhang, Z. Coordinated Control System Design and Verification of HTR-PM Plant. Nucl. Eng. Des. 2018, 329, 25–33. [Google Scholar] [CrossRef]
- Dong, Z.; Li, B.; Huang, X.; Dong, Y.; Zhang, Z. Power-Pressure Coordinated Control of Modular High Temperature Gas-Cooled Reactors. Energy 2022, 252, 124042. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Value |
|---|---|---|
| Thermal power | MW | 253 |
| Hot helium temperature | °C | 750 |
| Cold helium temperature | °C | 250 |
| Helium flowrates | kg/s | 96.26 |
| Steam pressure | MPa | 24.2 |
| Steam temperature | °C | 571 |
| Feedwater flowrate | kg/s | 95.6 |
| Cold Helium Temperature | Hot Helium Temperature | Helium Flowrate | |||||||
|---|---|---|---|---|---|---|---|---|---|
| /°C | /s | /°C | /°C | /s | /°C | /s | |||
| DMC+FIR (Robust case) | 0.092 | 2000 | 0 | 0.096 | 2000 | 0 | 0.033 | 2000 | 0 |
| DMC (Robust case) | 0.061 | / | / | 0.290 | / | / | 0.023 | / | / |
| DMC+FIR (Nominal case) | 0.092 | 2000 | 0 | 0.096 | 2000 | 0 | 0.033 | 2000 | 0 |
| DMC (Nominal case) | 0.037 | 185.5 | 0 | 0.505 | 228 | 0 | 0.057 | 228 | 0 |
| Cold Helium Temperature | Hot Helium Temperature | Helium Flowrate | Computation Count | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| /°C | /s | /°C | /°C | /s | /°C | /s | ||||
| 5 | 0.190 | / | / | 0.193 | / | / | 0.069 | / | / | 900 |
| 10 | 0.118 | / | / | 0.120 | / | / | 0.053 | / | / | 1900 |
| 15 | 0.097 | 2240 | 0 | 0.100 | 2106 | 0 | 0.036 | 2152 | 0 | 2900 |
| 20 | 0.089 | 2000 | 0 | 0.094 | 2000 | 0 | 0.033 | 2000 | 0 | 3900 |
| 25 | 0.089 | 1543 | 0 | 0.094 | 1669 | 0 | 0.033 | 1564 | 0 | 4900 |
| 30 | 0.089 | 1543 | 0 | 0.094 | 1555 | 0 | 0.033 | 1465 | 0 | 5900 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Dong, Z.; Zhang, J. An Improved Dynamic Matrix Control Algorithm and Its Application in Cold Helium Temperature Control of a Modular High-Temperature Gas-Cooled Reactor (mHTGR). Energies 2025, 18, 2145. https://doi.org/10.3390/en18092145
Wu Z, Dong Z, Zhang J. An Improved Dynamic Matrix Control Algorithm and Its Application in Cold Helium Temperature Control of a Modular High-Temperature Gas-Cooled Reactor (mHTGR). Energies. 2025; 18(9):2145. https://doi.org/10.3390/en18092145
Chicago/Turabian StyleWu, Zhendong, Zhe Dong, and Jilan Zhang. 2025. "An Improved Dynamic Matrix Control Algorithm and Its Application in Cold Helium Temperature Control of a Modular High-Temperature Gas-Cooled Reactor (mHTGR)" Energies 18, no. 9: 2145. https://doi.org/10.3390/en18092145
APA StyleWu, Z., Dong, Z., & Zhang, J. (2025). An Improved Dynamic Matrix Control Algorithm and Its Application in Cold Helium Temperature Control of a Modular High-Temperature Gas-Cooled Reactor (mHTGR). Energies, 18(9), 2145. https://doi.org/10.3390/en18092145