Performance Evaluation of an In-Wheel Motor Cooling System in an Electric Vehicle/Hybrid Electric Vehicle



Abstract
: High power and miniaturization of motors in an in-wheel drive system, which is installed inside the wheels of a vehicle, are required for directly driving the wheels. In addition, an efficient cooling system is required to ensure high driving performance and durability. This study experimentally evaluated the heat dissipation performance of a 35-kW-class large-capacity in-wheel motor equipped with an internal-circulation-type oil-cooling system that exhibits high cooling performance and can be easily miniaturized to this motor. Temperatures of the coil and stator core of cooling systems with and without a radiator were measured in real time under in-wheel motor driving conditions. It was found that operating the cooling system at a continuous-rating maximum speed without the radiator was difficult. We confirmed that under continuous-rating base speed and continuous-rating maximum speed driving conditions, the cooling system with the radiator showed thermally stable operation. Furthermore, under maximum-rating base speed and maximum-rating maximum speed driving conditions, the cooling system with the radiator provided additional driving times of approximately 22 s and 2 s, respectively.1. Introduction
With the emergence of energy depletion and environmental pollution as global issues in recent times, electric vehicles/hybrid electric vehicles (EVs/HEVs) that convert electric energy into motive power have attracted research attention as alternatives to existing internal-combustion-engine-based vehicles [1–3]. In particular, an in-wheel drive system—one of the electric drive systems—directly drives the wheels of a vehicle with the aid of a drive motor, which needs to be installed in the wheels. Because each wheel has an individual drive, the in-wheel drive system offers the benefits of maximizing the kinematic performance of a vehicle and increasing the flexibility of vehicle layout or design [4]. However, the parts of this system need to be miniaturized given the limited space in a wheel, which itself is installed in a complex configuration along with a drive motor and various parts of systems such as a brake system, steering system, and suspension system. To ensure high performance and durability of a motor, which is the most crucial part of the in-wheel drive system, miniaturization and uniform cooling are necessary [5,6].
Air-cooling, oil-cooling, or water-cooling systems are selectively used in the drive motors of EVs/HEVs, depending on the motor capacity and installation conditions. Kim et al. [7] conducted a study on improving cooling performance by establishing a thermal analysis model of an air-cooled motor and by optimizing the shape of the blades and bearing grooves installed on the rotor. They also conducted research [8] on improving the cooling performance by using travelling wind for changing the shape of the cooling grooves in an in-wheel motor housing. Huang et al. [9] performed a comparative analysis of cooling performance by changing the shape of cooling-oil channels formed on the stator core and housing of the drive motor. Zang et al. [10] conducted a study to evaluate and optimize the cooling performance of a water-cooling flow path using the in-wheel motors of articulated dump trucks. In addition, Fakhfakh et al. [11] developed a thermal model of a permanent magnet synchronous motor (PMSM) and then performed a comparative analysis of cooling performance in the case of using air-cooling and water-cooling systems.
Among the above-discussed three types of cooling systems, the air-cooling system has the advantage of having a simple configuration that does not have any assisting devices such as a pump or heat exchanger. However, since its cooling capacity is lower than those of the other two systems, it is unsuitable for use in large-capacity drive motors. Furthermore, even though the water-cooling system has the largest capacity from among the three systems, it is not applicable to in-wheel motors, because a flow path for cooling oil needs to be created separately on the housing, which conflicts with the key requirement of miniaturization for in-wheel motors. Therefore, in the present study, we selected an internal-circulation-type oil-cooling system, in which travelling wind is employed, and applied it to a 35-kW-class large-capacity in-wheel motor. Subsequently, we experimentally evaluated the heat dissipation performance of the motor under its main driving conditions. We also conducted a comparative study of cooling performance in the presence and absence of a radiator and found that the cooling system with a radiator improves the cooling performance by releasing the internal heat of the motor, which causes the cooling oil to absorb heat more effectively. However, a cooling system with a radiator has drawbacks of complexity and high manufacturing cost.
2. Cooling System and Experimental Setup
2.1. In-wheel Motor and Oil-Cooling System
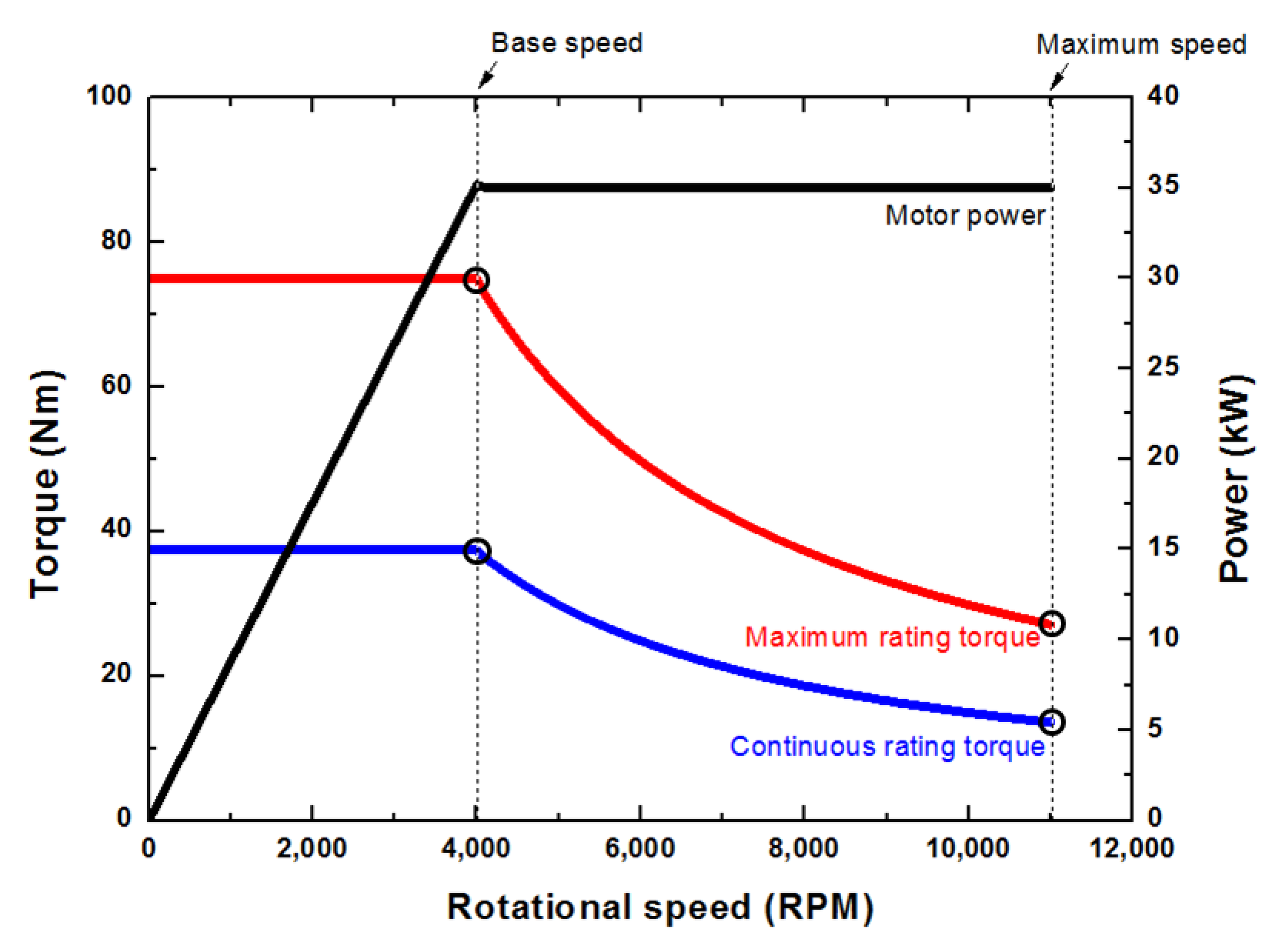
The in-wheel motor considered in this study is of an interior permanent magnet (IPM) type, in which the magnets are inserted in the rotor; the T-N curve of the motor is shown in Figure 1.
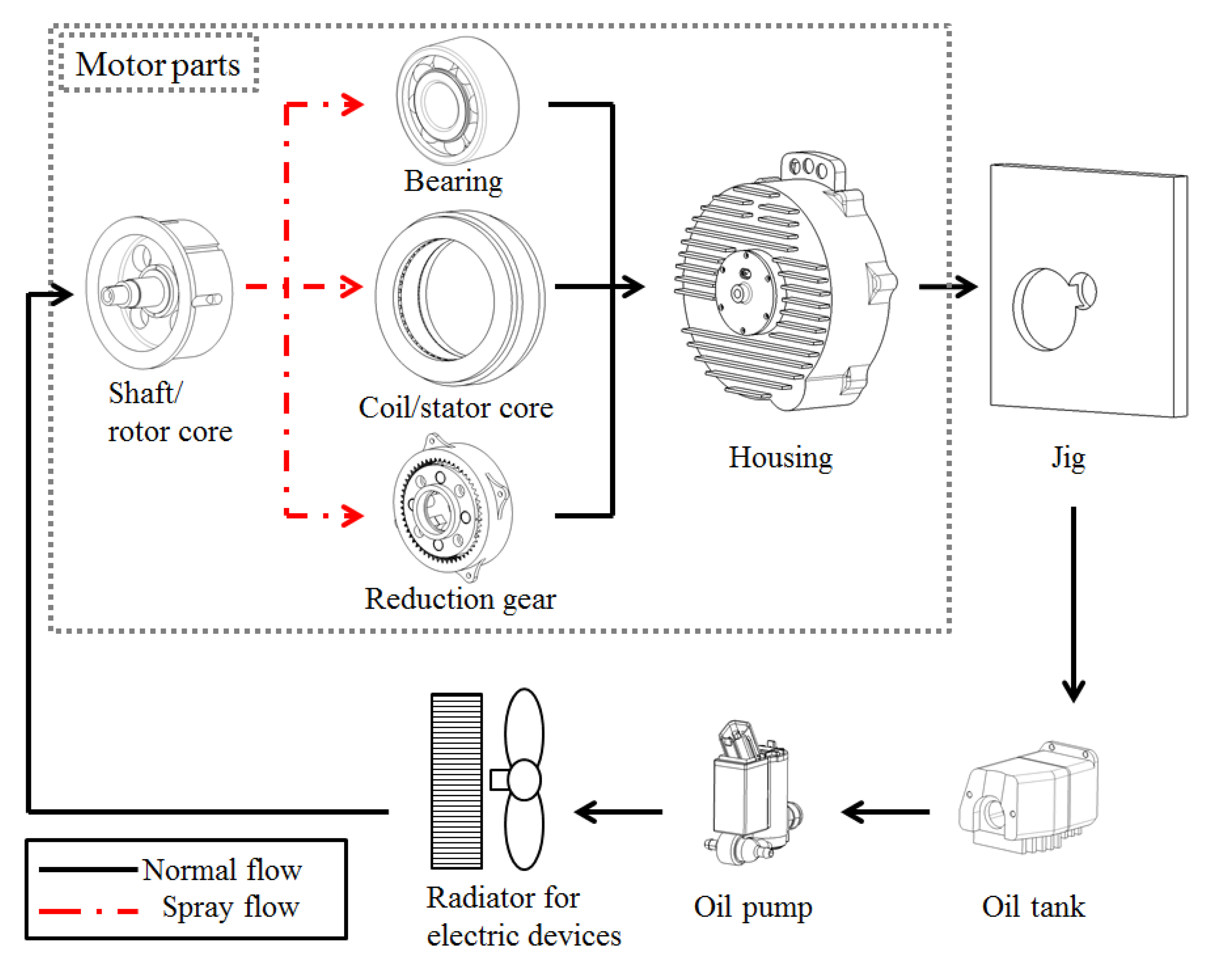
The maximum torque is 75 N·m, and the base and maximum rotational speeds are 4000 and 11,000 RPM, respectively (vehicle speeds of 55 and 140 km/h, respectively). Severe heat conditions, which are the key design points of a motor, correspond to a continuous-rating base speed or continuous-rating maximum speed and maximum-rating base speed or maximum-rating maximum speed. The maximum rating torque represents the momentary output torque of the in-wheel motor under start conditions. Also, the continuous rating torque is the output torque of the motor under continuous conditions and is about a half of the maximum rating torque. Under base-speed conditions, the heat generation rate increases due to copper loss caused by high torque. In contrast, under the maximum-speed conditions, iron loss and mechanical loss increase drastically [11,13]. The heat generation amounts calculated by electromagnetic analysis under each driving condition during the design of the motor are listed in Table 1 [14]. With the aim of measuring the performance of the cooling system, an experimental motor product (hereafter referred to as simply “experimental motor”) that included cooling oil paths was manufactured. Figure 2 shows the flow circuit of the cooling system. The cooling oil, which is stored in an oil tank with a capacity of approximately 0.2 L (outside dimension: 57 × 50 × 80 mm3), is delivered by an oil pump (maximum flow rate: 3 L/min) to the flow path, which is located in a hollow area of the shaft. The hollow flow path of the shaft has multiple exits in order for it to deliver cooling oil to the key components (coil, stator core, bearing, and reducer) of the motor that require lubrication and cooling, through a spraying and distribution method. The sprayed cooling oil absorbs the internal heat of the motor and then flows to the oil tank, passing through the housing and jigs. During this process, the heat absorbed by the cooling oil is released through the outer surfaces of the motor module, such as the housing, jigs, and oil tank, using the travelling wind of the vehicle and the radiator.
2.2. Experimental Setup
The performance of the cooling system was evaluated separately under four different driving conditions, as shown in Figure 2. The experimental apparatus was configured to include a radiator, and the discharge rate was set as 2 L/min considering the driving performance of the oil pump corresponding to its power rating on the basis of the result in Lim et al. [14]. The travelling wind of a vehicle was replicated outside the experimental motor by using an actual drive-generated wind simulator. The wind direction and speed were chosen to be equal to values established in previous studies [8]: the wind direction was 35° from the front of the vehicle toward the wheel, and the wind speeds were about 6.1 and 15.4 m/s, respectively, for the base-speed and maximum-speed conditions. Additionally, for the cooling system with the radiator, a radiator simulator was incorporated in the apparatus to generate the effect of the radiator. The cooling oil was maintained uniformly at a temperature of 65 °C. The experiment was conducted at a room temperature of 20 °C.
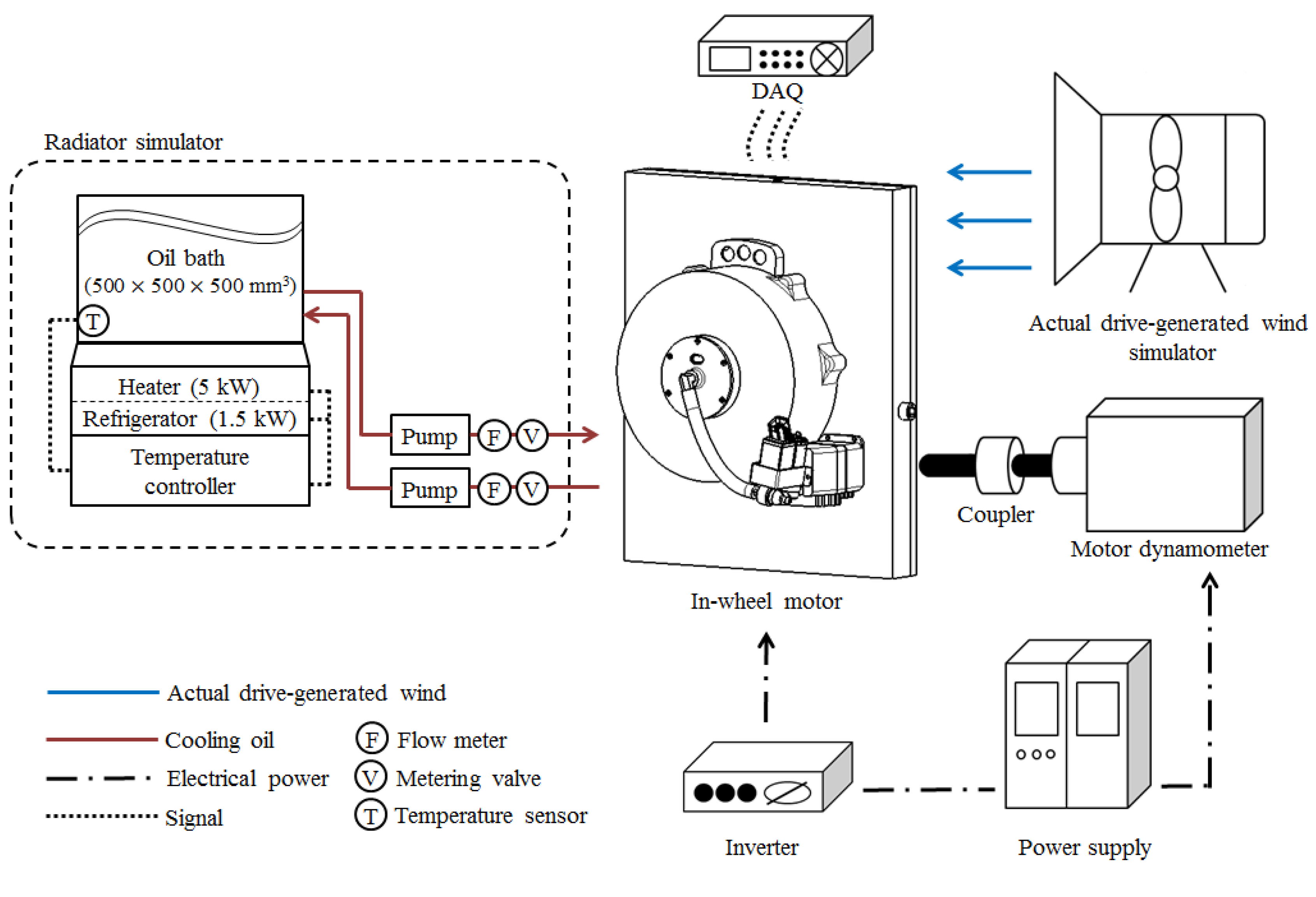
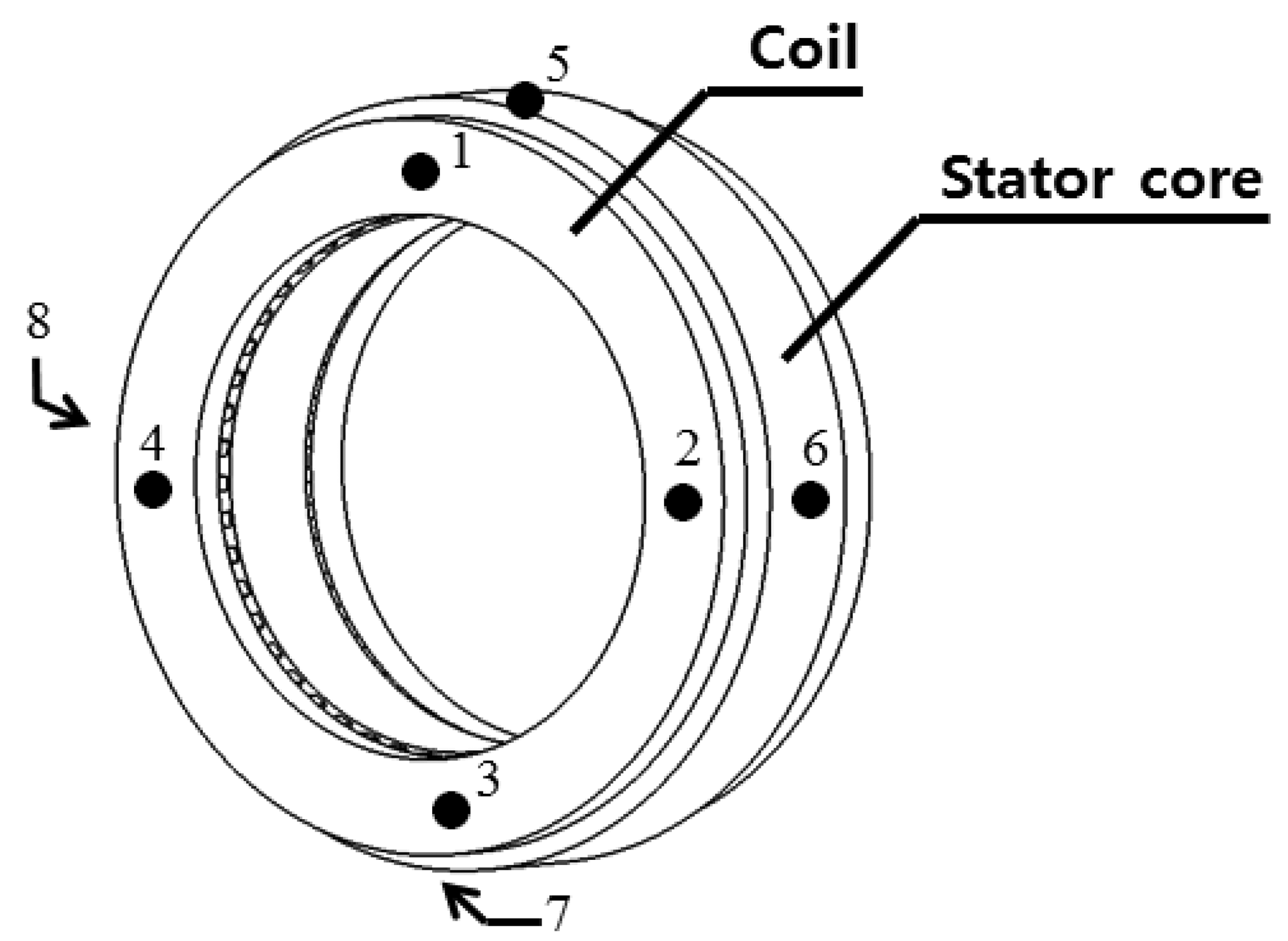
Figure 3 shows the experimental setup, and Table 2 lists the specifications of the experimental apparatus. To establish an environment identical to the actual driving conditions of an in-wheel motor, the experimental motor was installed on a motor dynamometer in which torque is permitted under the driving conditions, and the rotational velocity of this motor was controlled using an inverter. Furthermore, no reducer was installed for the experimental motor, to ensure smooth progression of the experiment. The radiator simulator maintained the cooling oil at a constant temperature by using a heater, refrigerator, and temperature controller, and it also provided and circulated the cooling oil to the motors by using two oil pumps. Usually, only one pump is used for circulating cooling fluid in typical closed-loop cooling flow paths. However, in the present study, two pumps were used to control the cooling oil level, and thus, the revolution of the motor rotor was not affected. Both pumps run at a constant and the equal pumping rate is controlled by using two metering valves and two flow meters. To measure the performance of the cooling system, the temperatures of the coil (points 1, 2, 3, 4) and stator core (points 5, 6, 7, 8), which strongly influence the performance and durability of the motor, were measured in real time using thermocouples mounted at four locations, as shown in Figure 4.
3. Results and Discussion
3.1. Continuous-Rating Conditions
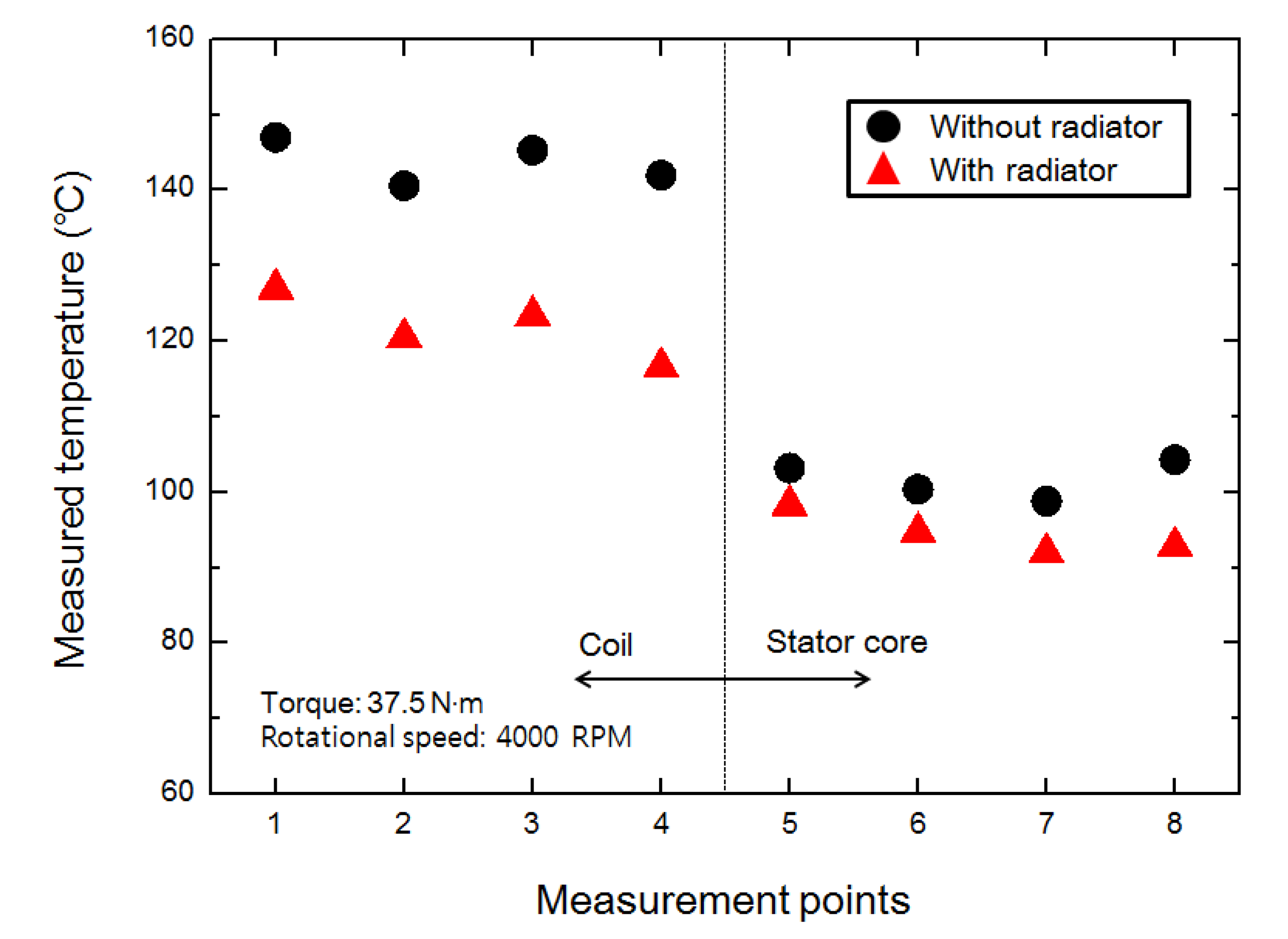
The saturation temperature of the motor under continuous-rating base speed conditions is shown in Figure 5. The saturation temperature is defined as the temperature at the moment when the temperature change is less than 0.5 °C over a duration of approximately 10 min. As mentioned above, each experiment was performed in the presence of a radiator. Then, the temperatures of the coil (measurement points 1–4) and stator core (measurement points 5–8) of the cooling system under the radiator effect induced by the radiator simulator were approximately 116–127 °C and approximately 92–98 °C, respectively, which are about 20 °C and 6 °C lower, respectively, than the temperatures in the model without a radiator (coil temperature: approximately 140–147 °C; stator-core temperature: approximately 99–104 °C). The in-wheel motor used in the present study has a maximum coil temperature of 150 °C to ensure high durability and performance. We found that both the experimental models (i.e., with and without the radiator) had coil temperatures below 150 °C. Furthermore, when the cooling oil temperature was maintained constant at approximately 65 °C through the radiator, the coil temperature was about 20 °C lower. Therefore, a cooling system equipped with a radiator is expected to have better performance and enable more stable driving than a cooling system without a radiator.
Figure 6 shows the temperatures measured for the two cooling system models (i.e., with and without a radiator) under the conditions of continuous-rating maximum speed. Specifically, Figure 6a shows the saturation temperature of the model in which the oil temperature was maintained constant at 65 °C by the radiator effect. The coil temperature in this case was approximately 134–138 °C, and the stator-core temperature was in the range of 104–109 °C. These temperatures are approximately 15 °C and 11 °C higher, respectively, than those under the condition of continuous-rating base speed. Thus, it can be said that the condition of continuous-rating maximum speed is a slightly more thermotropically severe environment than the condition of continuous-rating base speed. Figure 6b shows the saturated temperature of the model without a radiator, which was measured in real time in a transient state. As the maximum temperature of the coil exceeded 150 °C after 22 min of running the motor, the experiment stopped. This result implies that when the cooling system is applied to the motor without a radiator, it is impossible to drive the motor in continuous rating at the maximum speed.
3.2. Maximum-Rating Conditions
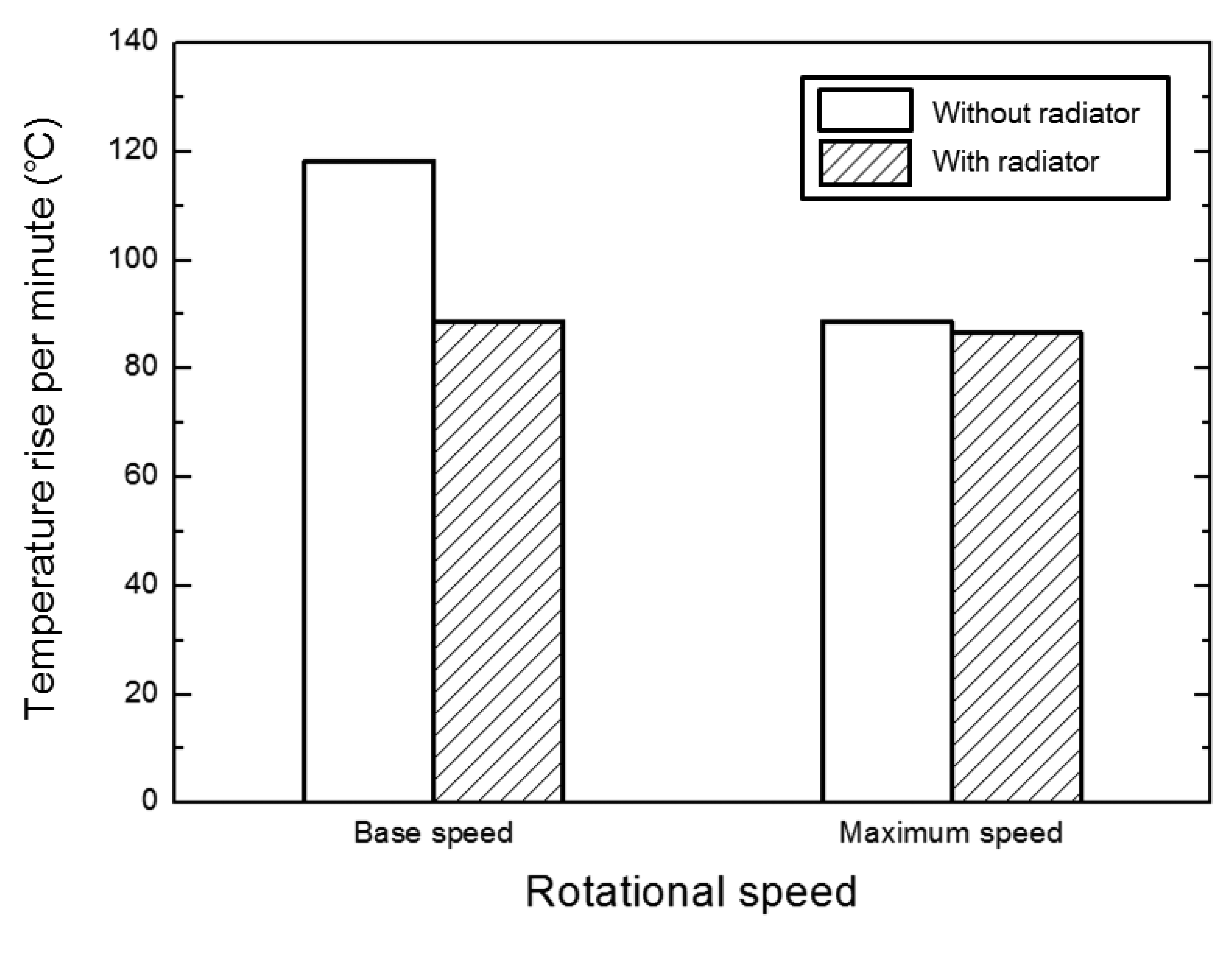
The temperature rise per minute for the coil under the maximum-rating conditions is shown in Figure 7. The temperature rise was measured until the coil temperature reached the limiting condition of 150 °C, and the rate of temperature rise was calculated on the basis of the measurement time. First, under the maximum-rating base-speed condition, the cooling system model with a radiator attained the coil temperature of 150 °C in about 88 s whereas the model without the radiator attained the same in 66 s. The rates of temperature rise for these two models were 88.6 °C/min and 118.2 °C/min, respectively. Therefore, when a radiator was included in the cooling system under the maximum-rating base-speed conditions, an additional driving time of about 22 s could be reached. However, under the maximum-rating maximum-speed conditions, the model with the radiator required approximately 90 s to attain the coil temperature of 150 °C whereas that without the radiator it required about 88 s for the same. The rates of temperature rise for these two models were 86.7 °C/min and 88.6 °C/min, respectively. Therefore, installation of the radiator is barely effective under the maximum-rating maximum-speed condition. This is because as the vehicle velocity increases, the heat release process on the surface of the motor (housing) in the form of iron loss and mechanical loss continues more uniformly owing to a strengthening of the cooling effect of travelling wind, and a reduction of temperature of the cooling oil through the radiator has a relatively small effect. In addition, under the maximum-rating conditions, the copper loss increases significantly owing to the increased torque and permitted current, thereby generating large amounts of heat. Therefore, the maximum-rating maximum-speed condition is more thermotropically severe than the maximum-rating base-speed condition.
4. Conclusions
In this study, we evaluated the heat dissipation performance of a 35-kW-class large-capacity in-wheel motor equipped with an internal-circulation-type oil-cooling system under the main driving conditions of the motor. Specifically, we performed a comparative analysis of motor thermal performance with and without a radiator and found that the thermal performance improves with the radiator, but the cooling system configuration in this case becomes more complicated.
Comparison of the saturation temperatures of the coil/stator core under continuous-rating base speed and continuous-rating maximum speed conditions showed that for the base-speed condition, both models (i.e., with and without a radiator) showed saturation temperatures lower than 150 °C, which confirmed that normal driving of a motor is possible under this condition. When the radiator was installed, the saturation temperature of the coil decreased by approximately 20 °C, which indicated that the model with a radiator was more stable in terms of heat. Furthermore, for the continuous-rating maximum-speed condition, the coil temperature of the model with a radiator saturated within 138 °C whereas that of the model without a radiator exceeded 150 °C. Therefore, normal driving is difficult without a radiator under this condition.
Under the maximum-rating base-speed conditions, the rate of temperature rise of the model with a radiator was 88.6 °C/min, which was about 30 °C/min lower than that of the model without a radiator, (118.2 °C/min). This condition also gave an additional driving time of about 22 s. Under the maximum-rating maximum-speed conditions, rates of temperature rise were 86.7 °C/min and 88.6 °C/min with and without the radiator, respectively, and this condition gave an additional driving time of about 90 s at most.
These experimental results demonstrate that when a radiator is installed in a cooling system, the heat performance of the in-wheel motor improves and more stable driving is possible under all driving conditions. In the future, we intend to conduct further studies for developing an in-wheel motor cooling system that has a simpler configuration as well as superior heat performance.
Acknowledgments
This study was conducted as part of the Industrial Source Technology Development Program sponsored by the Ministry of Knowledge Economy of Korea. The authors are also grateful for the support provided by Hyundai Mobis Co. (Seoul, South Korea).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Al-Alawi, B.M.; Bradley, T.H. Review of hybrid, plug-in hybrid, and electric vehicle market modeling Studies. Renew. Sustain. Energy Rev. 2013, 21, 190–203. [Google Scholar]
- Brown, S.; Pyke, D.; Steenhof, P. Electric vehicles: The role and importance of standards in an emerging market. Energy Policy 2010, 38, 3797–3806. [Google Scholar]
- Foley, A.; Tyther, B.; Calnan, P. Impacts of electric vehicle charging under electricity market operation. Appl. Energy 2013, 101, 93–102. [Google Scholar]
- Wang, R.; Chen, Y.; Feng, D.; Huang, X.; Wang, J. Development and performance characterization of an electric ground vehicle with independently actuated in-wheel motors. J. Power Sources 2011, 196, 3962–3971. [Google Scholar]
- Bonnett, A.H. Operating temperature considerations and performance characteristics for IEEE 841 motors. IEEE Trans. Ind. Appl. 2001, 37, 1120–1131. [Google Scholar]
- Chang, C.H.; Kuo, S.C.; Huang, C.H.; Chen, S.L. The investigation of motor cooling performance. Int. J. Aerosp. Mech. Eng. 2009, 3, 34–40. [Google Scholar]
- Kim, M.S.; Lee, K.S.; Um, S. Numerical investigation and optimization of the thermal performance of a brushless DC motor. Int. J. Heat Mass Transf. 2009, 52, 1589–1599. [Google Scholar]
- Kim, S.C.; Kim, W.; Kim, M.S. Cooling performance of 25 kW in-wheel motor for electric vehicles. Int. J. Automot. Technol. 2013, 14, 559–567. [Google Scholar]
- Huang, Z.; Marquez, F.; Alakula, M.; Yuan, J. Characterization and Application of Forced Cooling Channels for Traction Motors in HEVs. Proceeding of the International Conference of Electric Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 1212–1218.
- Zhang, Y.; Shen, Y.; Zhang, R. Optimized design of the cooling system for an articulated dump truck's electric drive system. SAE Int. 2010. [Google Scholar] [CrossRef]
- Fakhfakh, M.A.; Kasem, M.H.; Tounsi, S.; Neji, R. Thermal analysis of a permanent magnet synchronous motor for electric vehicles. J. Asian Electr. Veh. 2008, 6, 1145–1151. [Google Scholar]
- Lim, D.H.; Kim, S.C. Thermal performance of oil spray cooling system for in-wheel motor in electric vehicles. Appl. Therm. Eng. 2014, 63, 577–587. [Google Scholar]
- Mi, C.; Slemon, G.R.; Bonert, R. Modeling of iron losses of permanent-magnet synchronous motors. IEEE Trans. Ind. Appl. 2003, 39, 734–742. [Google Scholar]
- Maxwell 3D Version 15.0 User's Guide; ANSYS Inc: Canonsburg, PA, USA, 2010.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Copper loss (W) | Iron loss (W) | Mechanical loss (W) | |
|---|---|---|---|---|
| Continuous rating | Base speed | 287.5 | 194.0 | 119.0 |
| Maximum speed | 151.3 | 936.5 | 743.0 | |
| Maximum rating | Base speed | 1145.5 | 279.9 | 119.0 |
| Maximum speed | 460.2 | 1392.7 | 743.0 | |
| Components | Specifications | |
|---|---|---|
| Cooling oil (automatic transmission fluid, ATF) | Density: 812.5 kg/m3 (@65 °C) Specific heat: 2,030 J/kg·K (@65 °C) | |
| Thermocouples (T-type) | Range: −200–400 °C, Accuracy: ±0.5 K | |
| DAQ | Sampling rate 48 kS/s, Accuracy: 100 ppm | |
| Motor dynamometer | Max. speed: 15,000 RPM Max. torque: 100 N·m | |
| Actual drive-generated wind simulator | Max. air flow rate: 4,500 m3/h Max. air velocity: 50 m/s | |
| Radiator simulator | Refrigerator | Input power: 1.5 kW |
| Heater | Input power: 5 kW | |
| Oil pump | Range: 0–5 L/min, 4 bar | |
| Oil flow meter | Range: 0–5 L/min, Accuracy: ±0.1% | |
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Lim, D.H.; Lee, M.-Y.; Lee, H.-S.; Kim, S.C. Performance Evaluation of an In-Wheel Motor Cooling System in an Electric Vehicle/Hybrid Electric Vehicle. Energies 2014, 7, 961-971. https://doi.org/10.3390/en7020961
Lim DH, Lee M-Y, Lee H-S, Kim SC. Performance Evaluation of an In-Wheel Motor Cooling System in an Electric Vehicle/Hybrid Electric Vehicle. Energies. 2014; 7(2):961-971. https://doi.org/10.3390/en7020961
Chicago/Turabian StyleLim, Dong Hyun, Moo-Yeon Lee, Ho-Seong Lee, and Sung Chul Kim. 2014. "Performance Evaluation of an In-Wheel Motor Cooling System in an Electric Vehicle/Hybrid Electric Vehicle" Energies 7, no. 2: 961-971. https://doi.org/10.3390/en7020961
APA StyleLim, D. H., Lee, M.-Y., Lee, H.-S., & Kim, S. C. (2014). Performance Evaluation of an In-Wheel Motor Cooling System in an Electric Vehicle/Hybrid Electric Vehicle. Energies, 7(2), 961-971. https://doi.org/10.3390/en7020961