Fault Critical Point Prediction Method of Nuclear Gate Valve with Small Samples Based on Characteristic Analysis of Operation

 and
and
Abstract
:1. Introduction
- (1)
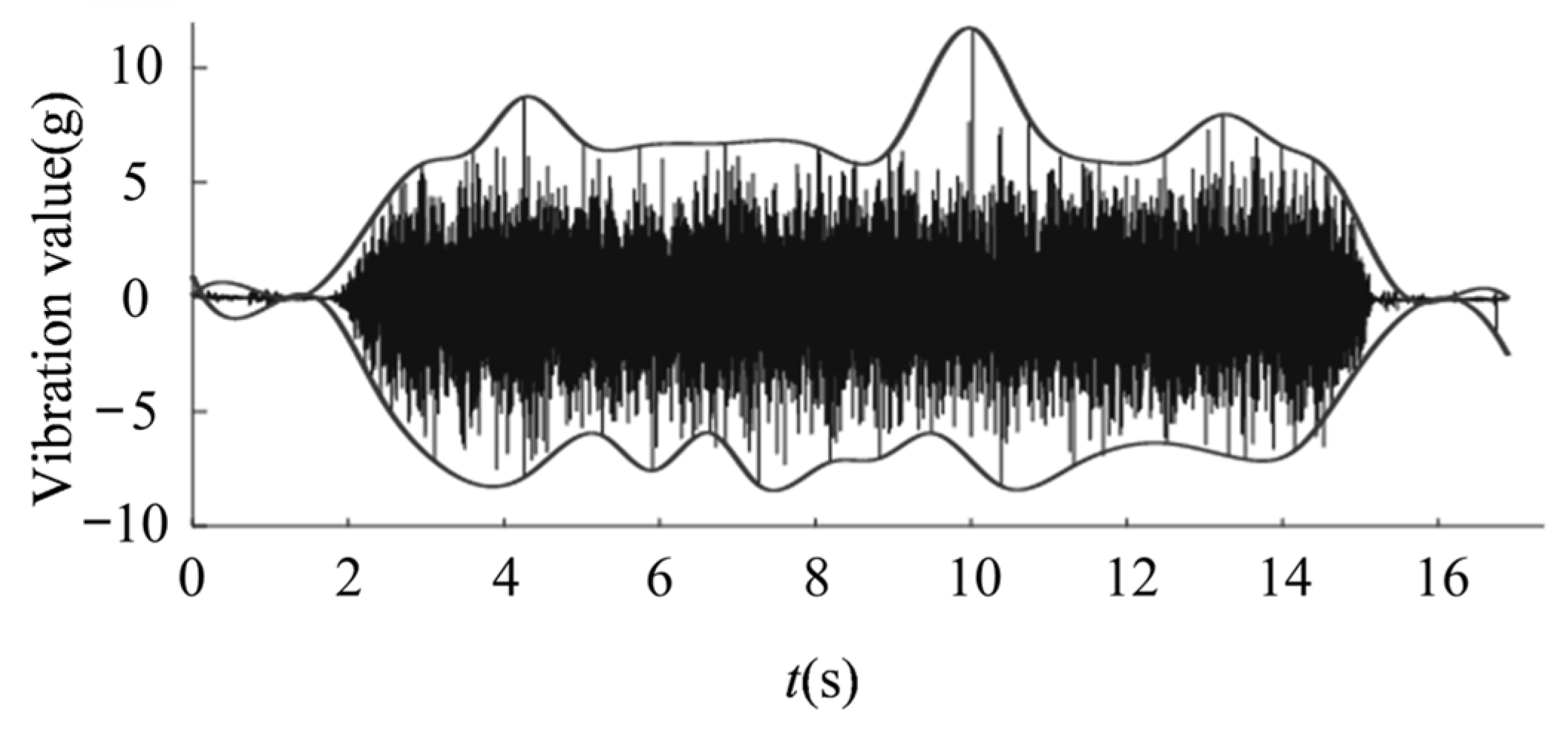
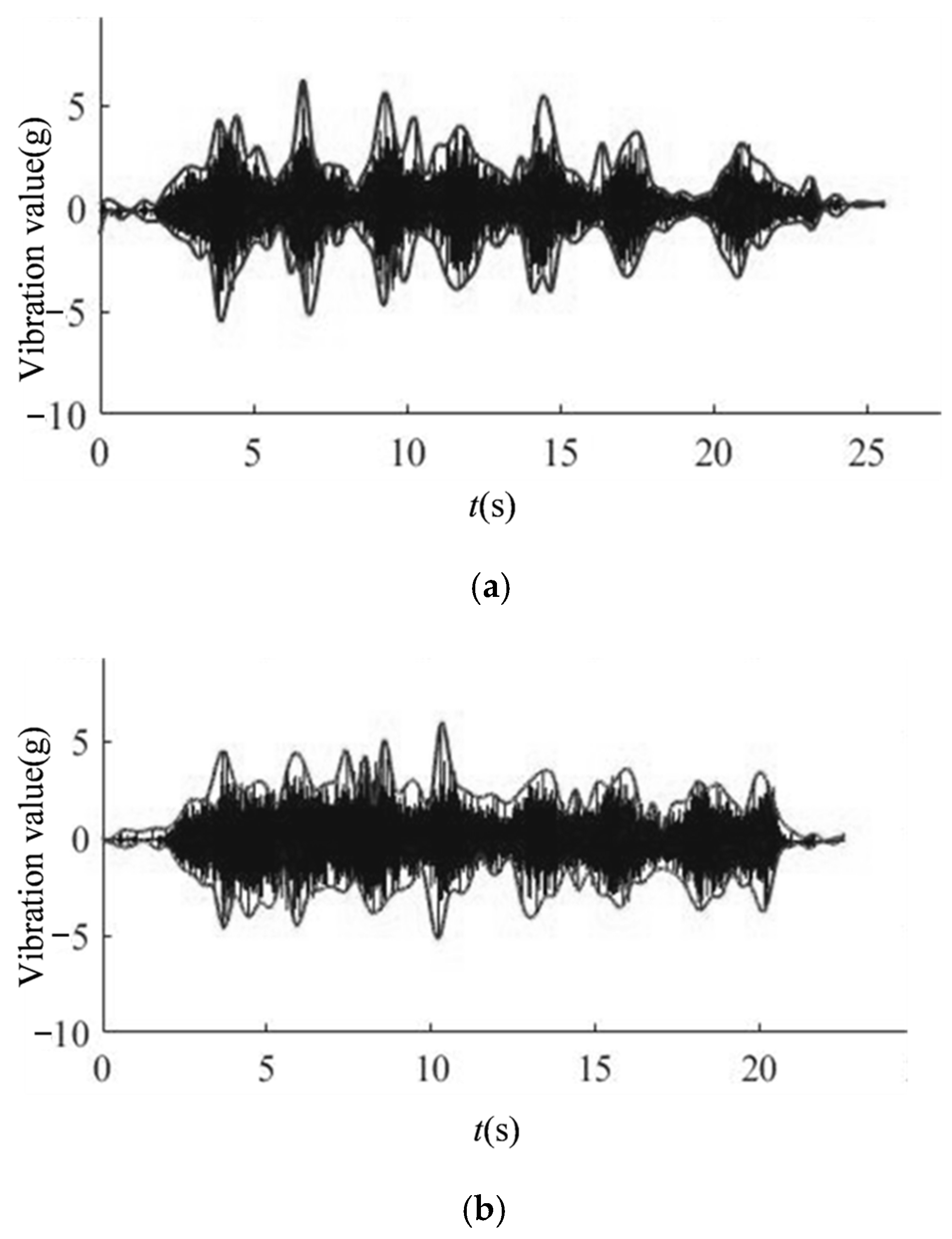
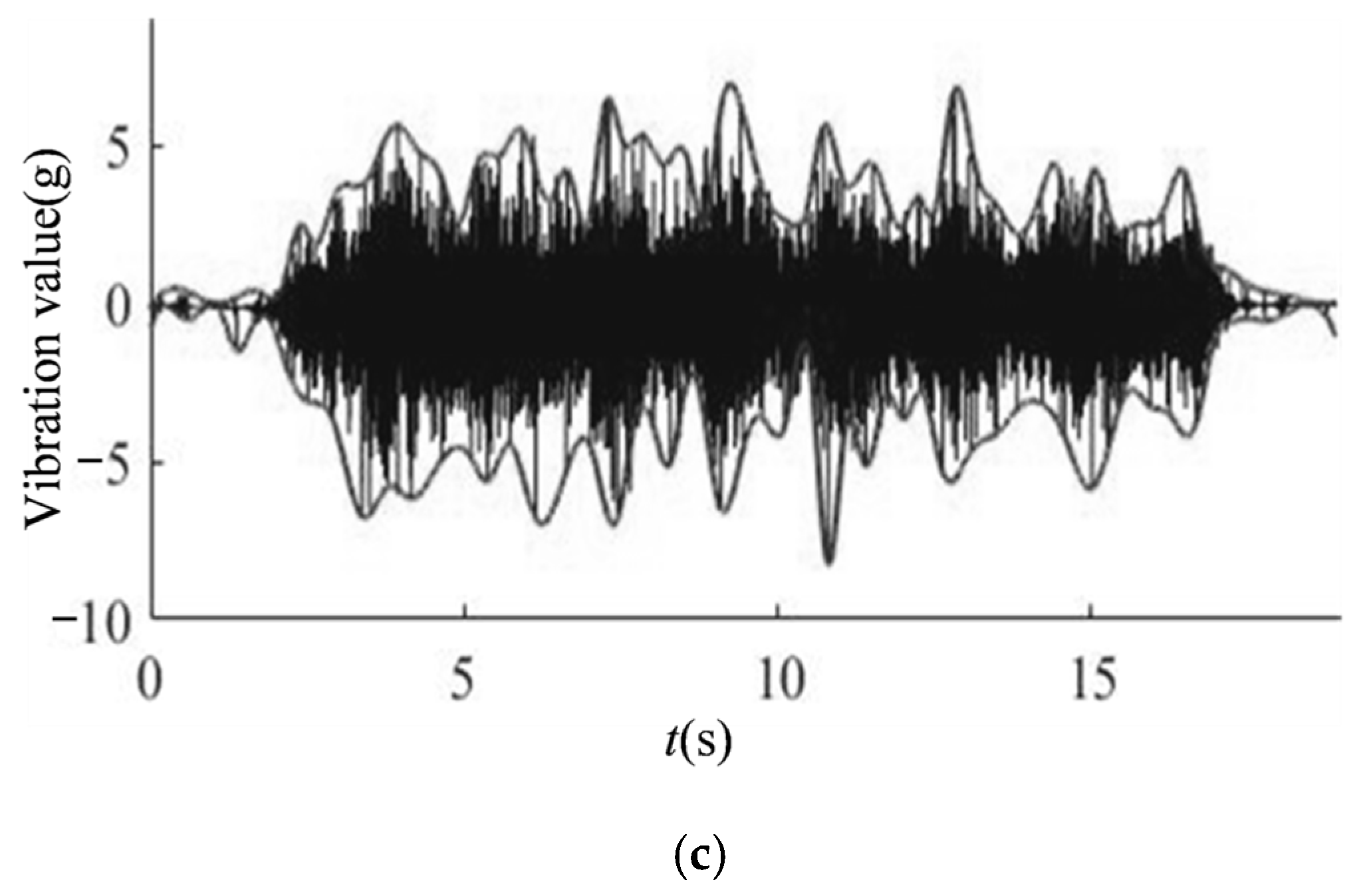
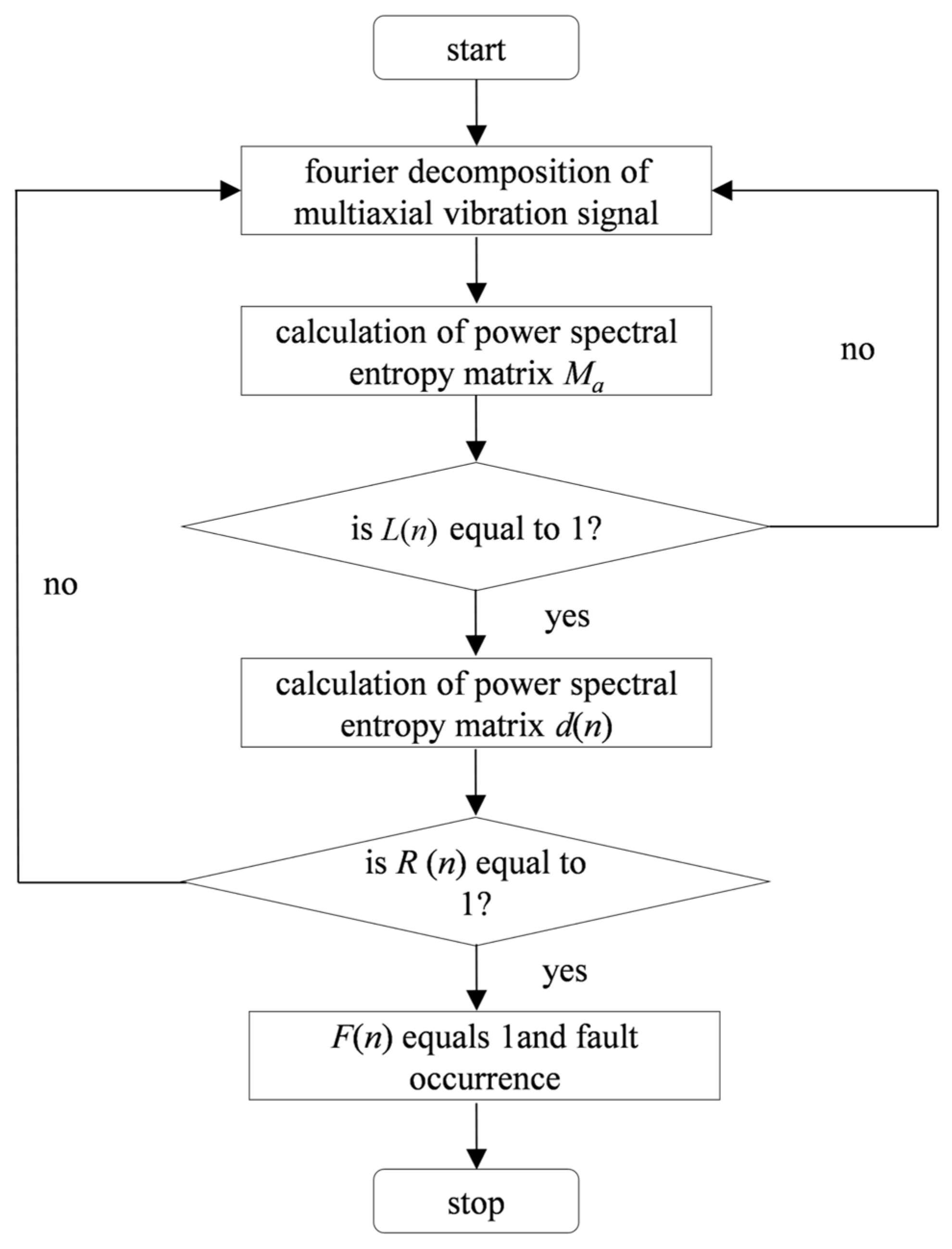
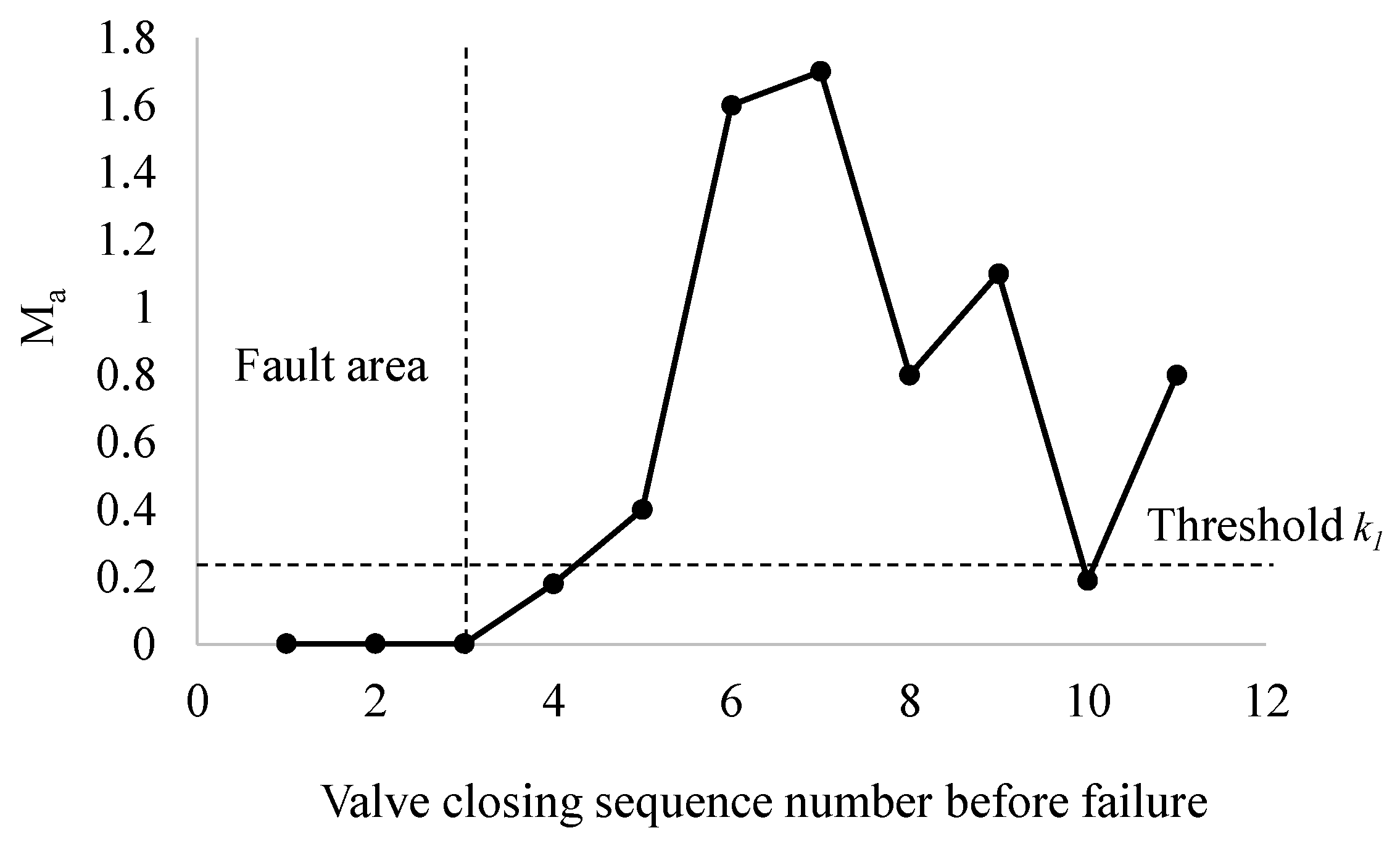
- Taking each opening and closing process of the gate valve as the research unit, use Shannon entropy to measure the power spectrum of the vibration signal during the opening and closing process of the gate valve. The mean value of power spectrum entropy is calculated and utilized used as an indirect process variable, then analyze the change characteristics of the mean value of power spectrum entropy when the gate valve is healthy and when the gate valve has different degrees of failure.
- (2)
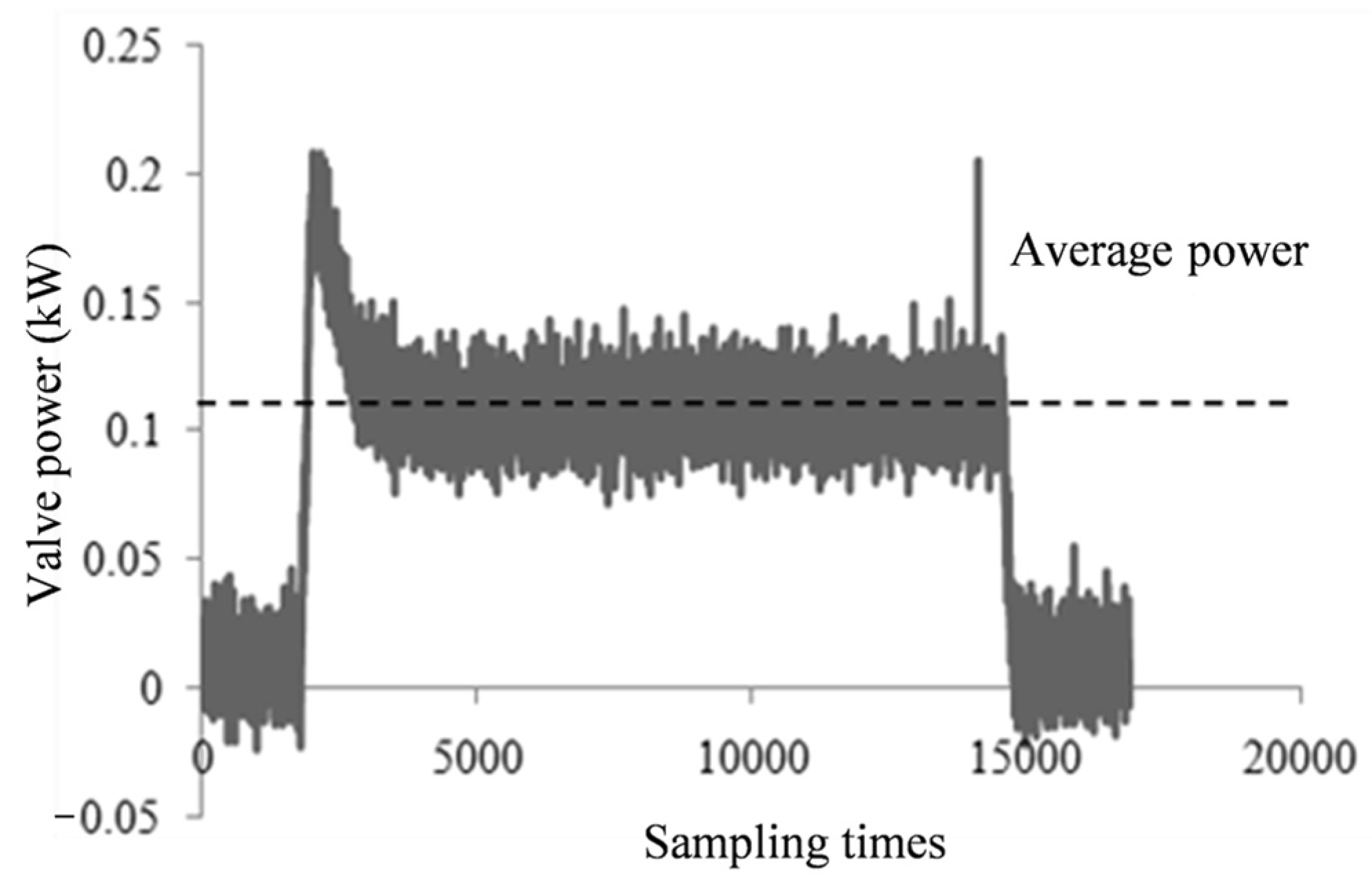
- Considering the gate valve power signal as the direct process variable to analyze the characteristics of the power signal change before the gate valve failure and under different failure degrees.
- (3)
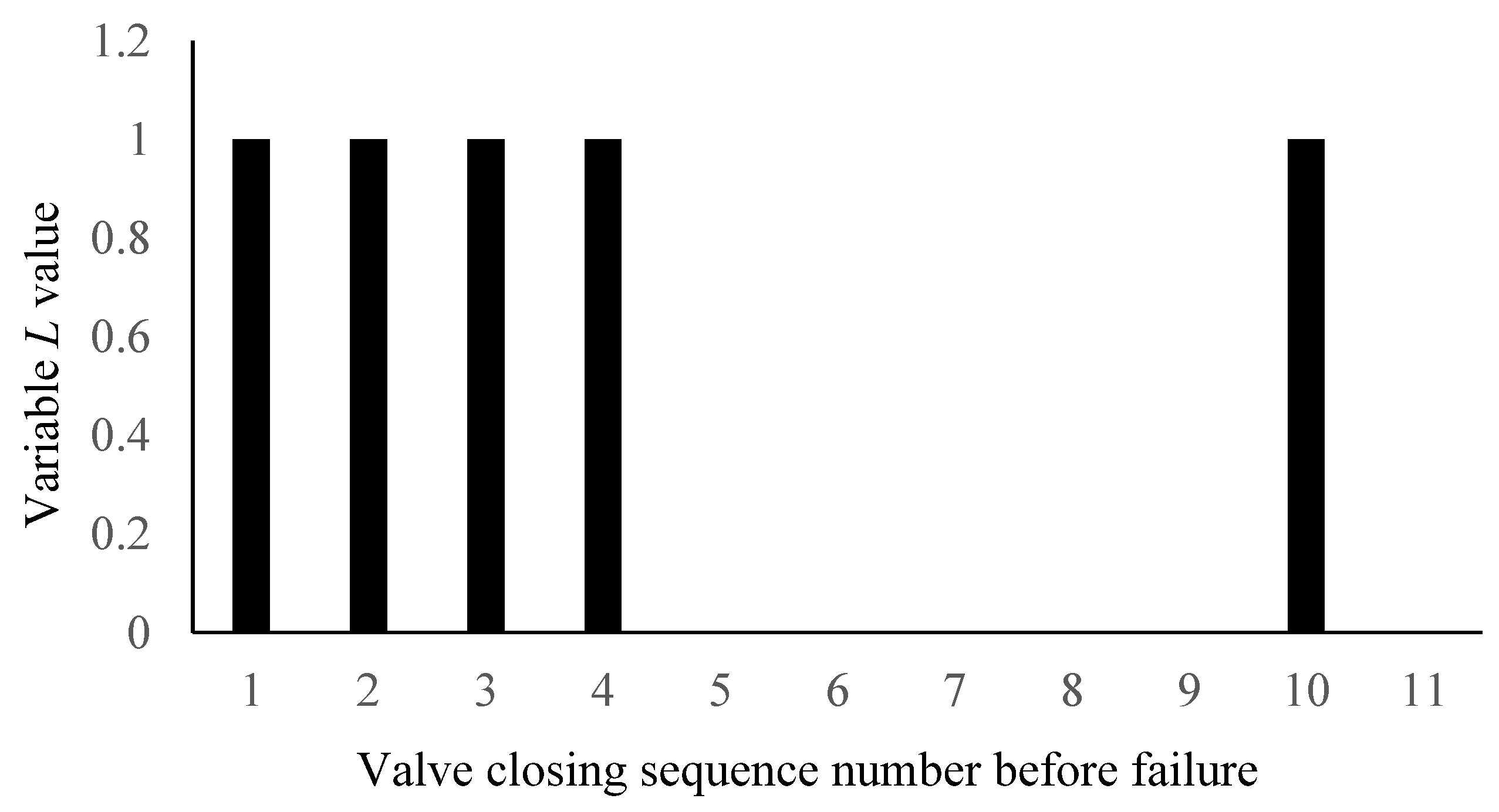
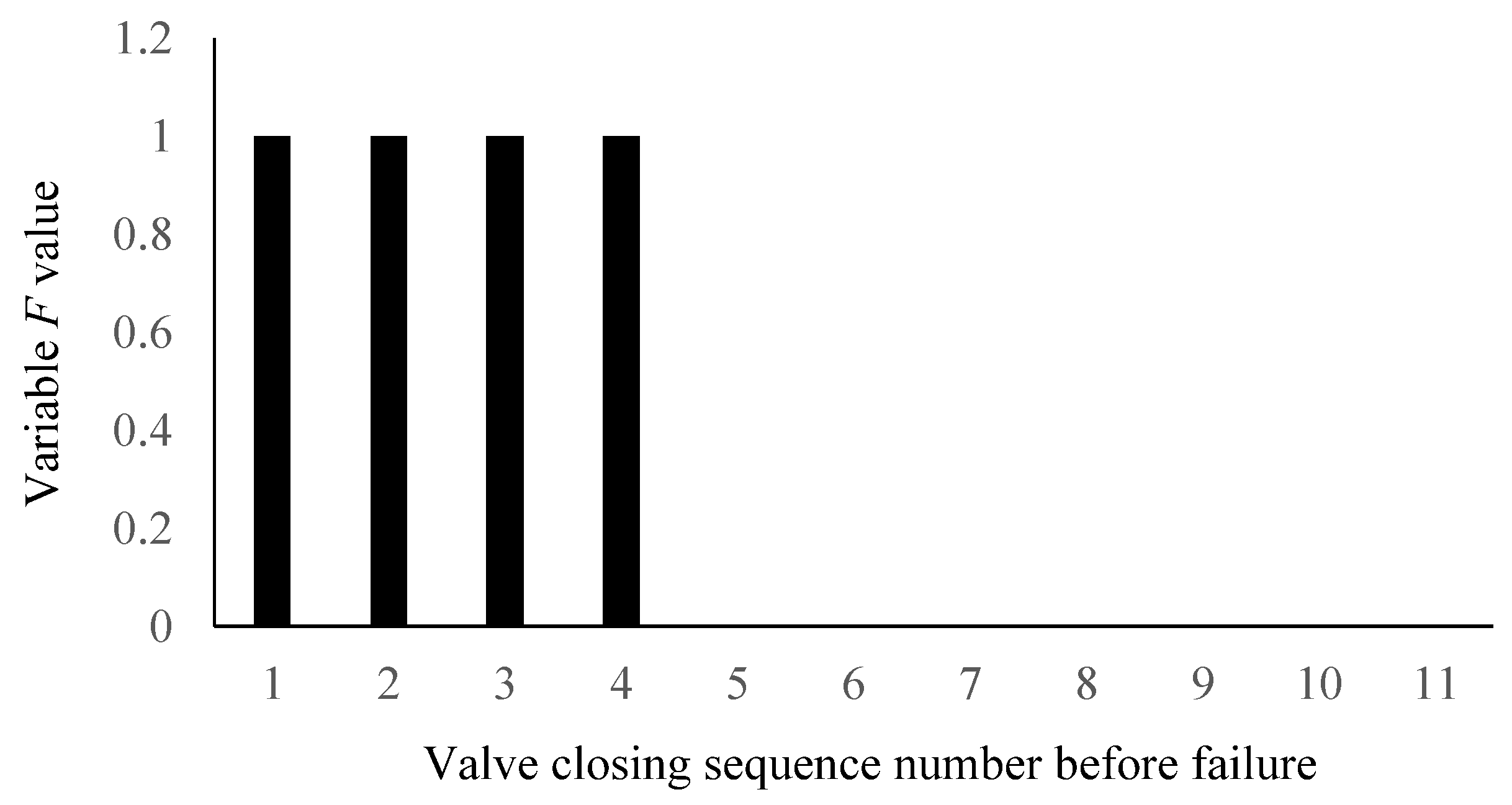
- The critical point of gate valve fault is predicted by analyzing the characteristic changes of direct process variable and indirect process variable.
- (4)
- Finally, based on nuclear gate valve experimental analysis, the method is verified by experiments. The experimental results show that the method can effectively predict the critical point of nuclear gate valve failure.
2. Critical Point Prediction Method for Gate Valve Failure
2.1. Vibration Signals of Gate Valve and In-Direct Variable
2.2. Operation Power Signal of Gate Valve and Direct Variable
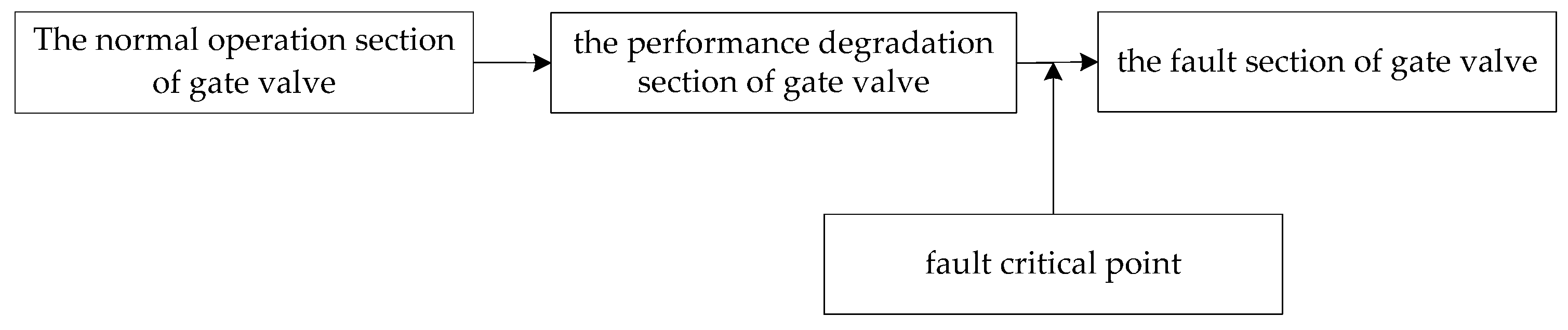
2.3. Fault Critical Point Prediction Method Based on Direct Variable and Indirect Variable
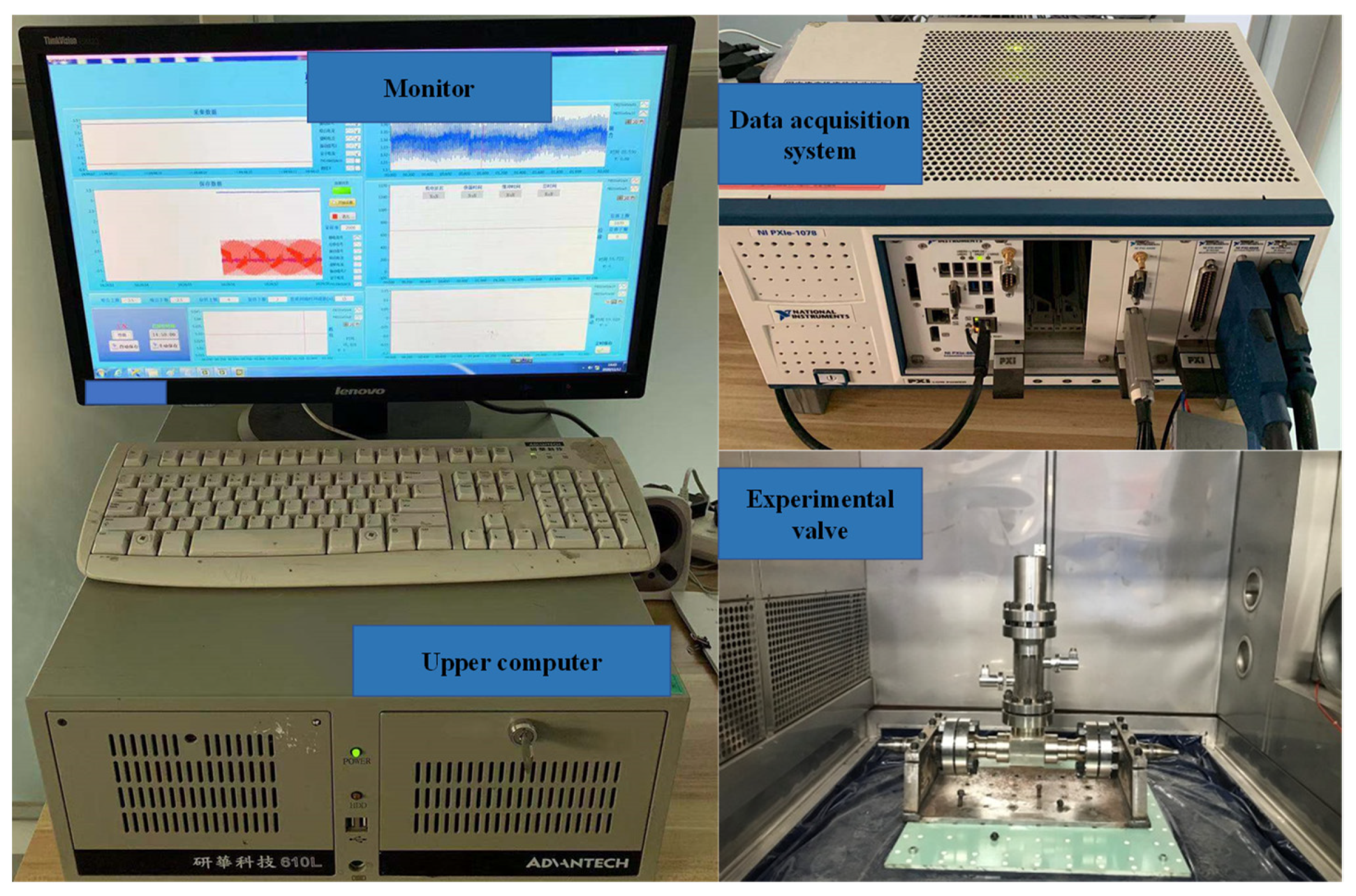
3. Fault Prediction Experiment and Result Analysis
4. Comparative Analysis with Typical Methods
5. Conclusions
- (1)
- For the new nuclear gate valve, the proposed fault critical point prediction method can identify almost 100% of the fault critical point if the diagnostic threshold is selected appropriately. Compared with traditional methods based on variable analysis or machine learning, it improves the accuracy of fault identification to a certain extent.
- (2)
- The accuracy of the proposed fault critical point prediction method depends on the selection of diagnosis thresholds. The selection principle of diagnosis thresholds is given in this paper. In the worst case, if the threshold selection is inaccurate and the critical point prediction is inaccurate, the fault can still be diagnosed in advance to a certain extent.
- (3)
- In the case of small samples, this method can effectively predict the fault critical point of the new nuclear gate valve, which is of positive significance to the operation and maintenance of the gate valve and improves the reliability of the nuclear power plant. At the same time, this method can also be applied to the fault critical point prediction of valves in other fields, such as the chemical industry.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Han, G.; Wang, H.; Jiang, J.; Zhang, W.; Chan, S. CASLP: A confused arc-based source location privacy protection scheme in WSNs for IoT. IEEE Commun. Mag. 2018, 56, 42–47. [Google Scholar] [CrossRef]
- Liu, T.; Yin, S. An improved particle swarm optimization algorithm used for BP neural network and multimedia course-ware evaluation. Multimed. Tools Appl. 2017, 76, 11961–11974. [Google Scholar] [CrossRef] [Green Version]
- Delpha, C.; Diallo, D.; Al Samrout, H.; Moubayed, N. Multiple incipient fault diagnosis in three-phase electrical systems using multivariate statistical signal processing. Eng. Appl. Artif. Intell. 2018, 73, 68–79. [Google Scholar] [CrossRef]
- Wan, Z.; Zheng, J.; Li, J.; Man, Z. Fault Feature Analysis of Gear Tooth Spalling Based on Dynamic Simulation and Experiments. Materials 2021, 14, 6053. [Google Scholar] [CrossRef] [PubMed]
- Cózar, J.; Puerta, J.M.; Gámez, J.A. An application of dynamic Bayesian networks to condition monitoring and fault prediction in a sensored system: A case study. Int. J. Comput. Intell. Syst. 2016, 10, 176–195. [Google Scholar] [CrossRef] [Green Version]
- Lakehal, A.; Tachi, F. Bayesi and duval triangle method for fault prediction and assessment of oil immersed transformers. Meas. Control. 2017, 50, 103–109. [Google Scholar] [CrossRef]
- Li, F.; Li, R.; Tian, L.; Chen, L.; Liu, J. Data-driven time-frequency analysis method based on variational mode decomposition and its application to gear fault diagnosis in variable working conditions. Mech. Syst. Signal Process. 2018, 116, 462–479. [Google Scholar] [CrossRef]
- Zhang, W.; Han, G.; Wang, J.; Liu, Y. A BP neural network prediction model based on dynamic cuckoo search optimization algorithm for industrial equipment fault prediction. IEEE Access 2019, 7, 11736–11746. [Google Scholar] [CrossRef]
- Lo, C.H.; Chan, P.T.; Wong, Y.K.; Rad, A.B.; Cheung, K.L. Fuzzy genetic algorithm for automatic fault detection in HVAC systems. Appl. Soft Comput. 2015, 7, 554–560. [Google Scholar] [CrossRef]
- Yousefi, P.; Fekriazgomi, H.; Demir, M.A.; Prevost, J.J.; Jamshidi, M. Data-Driven Fault Detection of Un-Manned Aerial Vehicles Using Supervised Learning Over Cloud Networks. In Proceedings of the 2018 World Automation Congress (WAC), Stevenson, WA, USA, 3–6 June 2018; pp. 1–6. [Google Scholar]
- Xin, G.; Hamzaoui, N.; Antoni, J. Semi-automated diagnosis of bearing faults based on a hidden Markov model of the vibration signals. Measurement 2018, 127, 141–166. [Google Scholar] [CrossRef]
- Sun, C.; Wang, X.; Zheng, Y. Data-driven approach for spatiotemporal distribution prediction of fault eventsin power transmission systems. Int. J. Electr. Power Energy Syst. 2019, 113, 726–738. [Google Scholar] [CrossRef]
- Ding, B.; Fang, H. Fault prediction for nonlinear stochastic system with incipient fault sbasedon particle filter and nonlinear regression. ISA Trans. 2017, 68, 327–334. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.Q.; Zhu, Q.X.; Xu, Y. Time series extended finite-state machine-based relevance vector machine multi-fault prediction. Chem. Eng. Technol. 2017, 40, 639–647. [Google Scholar] [CrossRef]
- Mahdi, M.; Genc, V.I. Post-fault prediction of transientin stabilities using stacked sparse autoencoder. Electr. Power Syst. Res. 2018, 164, 243–252. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Hauptmann, A.G. Simultaneous Bearing Fault Recognition and Remaining Useful Life Prediction Using Joint-Loss Convolutional Neural Network. IEEE Trans. Ind. Inform. 2020, 16, 87–96. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W. Deep Learning-Based Partial Domain Adaptation Method on Intelligent Machinery Fault Diagnostics. IEEE Trans. Ind. Electron. 2020, 68, 4351–4361. [Google Scholar] [CrossRef]
- Miao, M.; Yu, J. A Deep Domain Adaptative Network for Remaining Useful Life Prediction of Machines Under Different Working Conditions and Fault Modes. IEEE Trans. Instrum. Meas. 2021, 70, 1–14. [Google Scholar] [CrossRef]
- Guo, L.; Li, N.; Jia, F.; Lei, Y.; Lin, J. A recurrent neural network based health indicator for remaining useful life prediction of bearings. Neurocomputing 2017, 240, 98–109. [Google Scholar] [CrossRef]
- Rao, U.M.; Sood, Y.R.; Jarial, R.K. Subtractive clustering fuzzy expert system for engineering applications. Procedia Comput. Sci. 2015, 48, 77–83. [Google Scholar] [CrossRef] [Green Version]
- Rathore, S.S.; Kumar, S. A decision tree logic based recommendation system oselect software fault prediction techniques. Computing 2017, 99, 255–285. [Google Scholar] [CrossRef]
- Wang, X.; Liu, C.; Bi, F.; Bi, X.; Shao, K. Fault diagnosis of diesel engine based on adaptive wavelet packets and EEMD-fractal dimension. Mech. Syst. Signal Process. 2013, 41, 581–597. [Google Scholar] [CrossRef]
- Qiao, J.; Zhou, H. Modeling of energy consumption and effluent quality using density peaks-based adaptive fuzzy neural network. IEEE/CAA J. Autom. Sin. 2018, 5, 968–976. [Google Scholar] [CrossRef]
- Villez, K.; Srinivasan, B.; Rengaswamy, R.; Narasimhan, S.; Venkatasubramanian, V. Kalman-based strategies for fault detection and identification (FDI): Extensions and critical evaluation for a buffer tank system. Comput. Chem. Eng. 2011, 35, 806–816. [Google Scholar] [CrossRef]
- Wang, G.; Xu, T.; Tang, T.; Yuan, T.; Wang, H. A Bayesian network model for prediction of weather-related failures in railway turnout systems. Expert Syst. Appl. 2017, 69, 247–256. [Google Scholar] [CrossRef]
- Wang, H.Q.; Cai, Y.N.; Fu, G.Y.; Wu, M.; Wei, Z.H. Data-driven fault prediction and anomaly measurement for complex systems using support vector probability density estimation. Eng. Appl. Artif. Intell. 2018, 67, 1–13. [Google Scholar] [CrossRef]
- Khalil, K.; Eldash, O.; Kumar, A.; Bayoumi, M. Machine Learning-Based Approach for Hardware Faults Prediction. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 1–13. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, J.; Wei, B.; Chen, W.; Xu, S. Investigating the Construction, Training, and Verification Methods of k-Means Clustering Fault Recognition Model for Rotating Machinery. IEEE Access 2020, 8, 196515–196528. [Google Scholar] [CrossRef]
- Liu, J.; Tang, Y.; Zeng, D.; Yan, F.; Zheng, Y. Fault Prediction of Electromagnetic Launch System Based on Knowledge Prediction Time Series. IEEE Trans. Ind. Appl. 2021, 57, 1830–1839. [Google Scholar] [CrossRef]
- Wang, Q.; Wei, B.; Liu, J.; Ma, W. Data-Driven Incipient Fault Prediction for Non-Stationary and Non-Linear Rotating Systems: Methodology, Model Construction and Application. IEEE Access 2020, 8, 197134–197146. [Google Scholar] [CrossRef]
- Ma, X.; Hu, H.; Shang, Y. A New Method for Transformer Fault Prediction Based on Multifeature Enhancement and Refined Long Short-Term Memory. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Han, X.; Jiang, J.; Xu, A.; Huang, X.; Pei, C.; Sun, Y. Fault Detection of Pneumatic Control Valves based on Canonical Variate Analysis. IEEE Sens. J. 2021, 99, 1. [Google Scholar] [CrossRef]
- Wang, B.; Jahanshahi, H.; Volos, C.; Bekiros, S.; Khan, M.A.; Agarwal, P.; Aly, A.A. A New RBF Neural Network-Based Fault-Tolerant Active Control for Fractional Time-Delayed Systems. Electronics 2021, 10, 1501. [Google Scholar] [CrossRef]
- Rajchakit, G.; Agarwal, P.; Ramalingam, S. Stability Analysis of Neural Networks; Springer: Singapore, 2021. [Google Scholar]
- Mysore, T.H.M.; Patil, A.Y.; Raju, G.U.; Banapurmath, N.R.; Bhovi, P.M.; Afzal, A.; Alamri, S.; Saleel, C.A. Investigation of Mechanical and Physical properties of Big sheep horn as an alternative biomaterial for structural applications. Materials 2020, 14, 4039. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Existing Typical Fault Prediction Method | Method Accuracy | Method Advantages | Method Disadvantages | Remarks |
|---|---|---|---|---|
| Method based on canonical variate analysis (CVA) | ≤91.4% | A large number of samples and fault characteristic data are not required for model training | Fault diagnosis is realized, fault prediction is not realized | Based on the analysis of typical variables, details are given in literature [31] |
| Method based on clustering and data | 80–94% | High diagnostic accuracy | A large number of data and samples are required and failure can-not be predicted | It belongs to the method of machine learning, details are given in literature [28] |
| Sensitive variable feature fusion analysis method proposed in this paper | If the threshold is selected appropriately, accuracy is 100% | Small amount of calculation, high accuracy, no need for a lot of data and samples | Need to choose thresholds | According to the given principles, appropriate thresholds can be selected. If thresholds is not accurate, fault can still be predicted to a certain extent |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Liu, J.; Huang, Y.; Li, T.; Nie, C.; Xia, Y.; Zhan, L.; Tang, Z.; Zhang, L. Fault Critical Point Prediction Method of Nuclear Gate Valve with Small Samples Based on Characteristic Analysis of Operation. Materials 2022, 15, 757. https://doi.org/10.3390/ma15030757
Liu Z, Liu J, Huang Y, Li T, Nie C, Xia Y, Zhan L, Tang Z, Zhang L. Fault Critical Point Prediction Method of Nuclear Gate Valve with Small Samples Based on Characteristic Analysis of Operation. Materials. 2022; 15(3):757. https://doi.org/10.3390/ma15030757
Chicago/Turabian StyleLiu, Zhilong, Jie Liu, Yanping Huang, Tongxi Li, Changhua Nie, Yanjun Xia, Li Zhan, Zhangchun Tang, and Lin Zhang. 2022. "Fault Critical Point Prediction Method of Nuclear Gate Valve with Small Samples Based on Characteristic Analysis of Operation" Materials 15, no. 3: 757. https://doi.org/10.3390/ma15030757