
A Robust Adaptive Mesh Generation Algorithm: A Solution for Simulating 2D Crack Growth Problems



Abstract
:1. Introduction
2. Developed Program Procedure
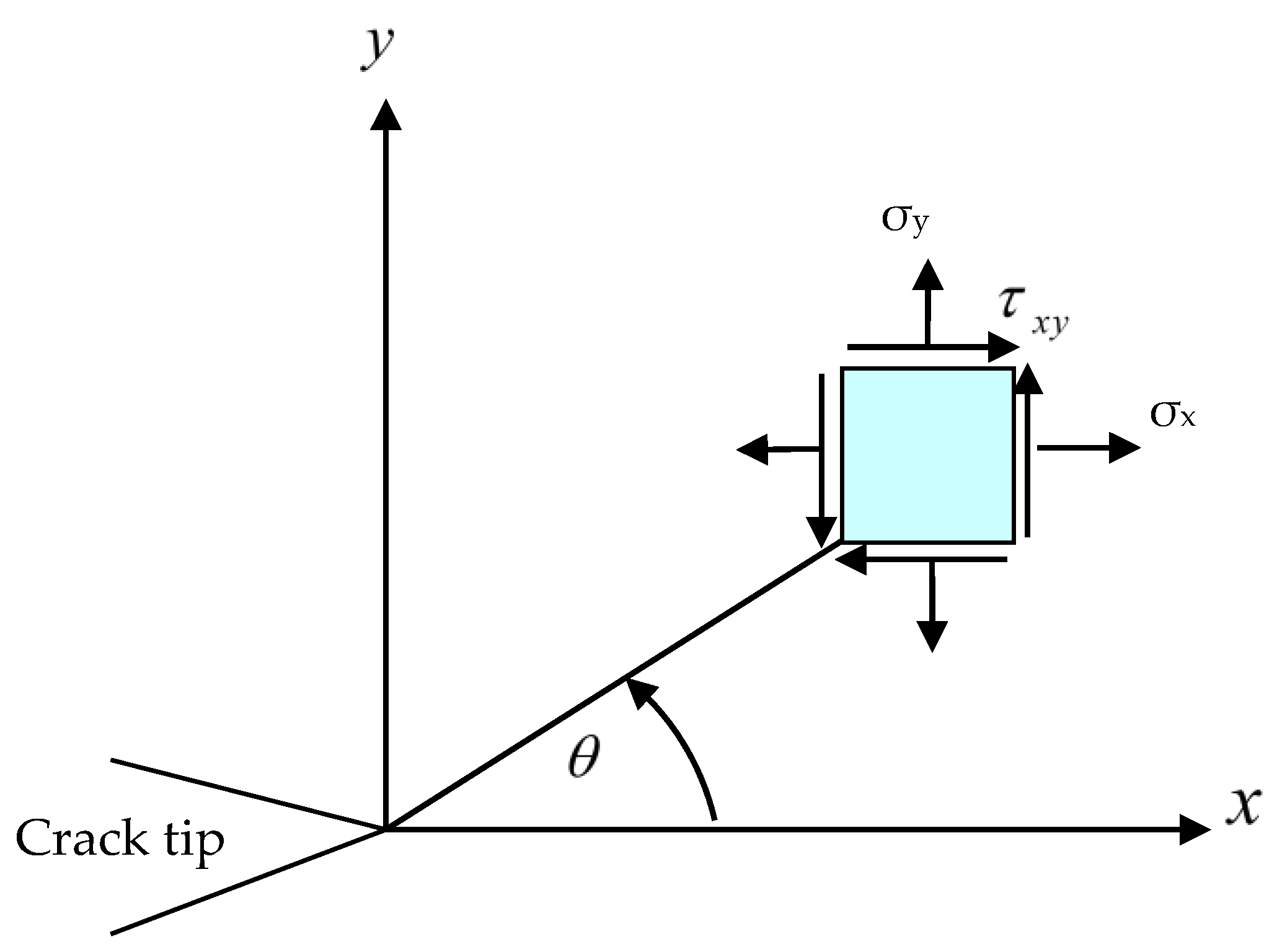
2.1. Analytical Solution of the Plane Crack Problem
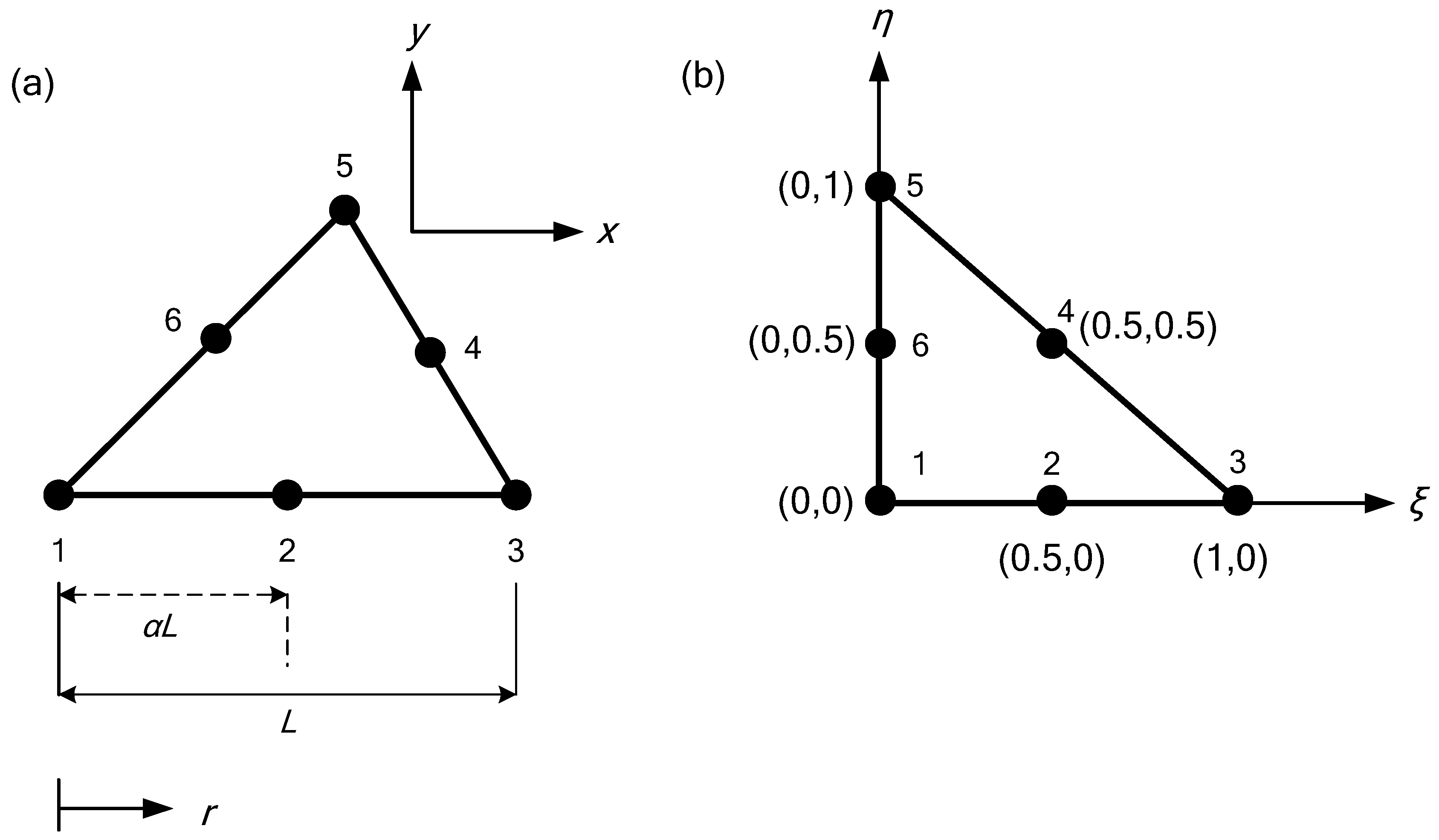
2.2. Isoparametric Formulation of Quadratic Shape Functions
2.3. Normal and Tangential Load Representation
2.4. Automatic Mesh Generation
- Node generation: In the first step, nodes are generated along the boundary edges to create a discretized boundary for the domain.
- Element and node generation: Once the boundary is discretized, the next step is to generate elements and nodes within the boundary.
- Element shape enhancement: In the final step, the quality of the mesh is improved by enhancing the shape of the elements. Element shape refinement techniques involve adjusting the position of the nodes to improve the shape and quality of the elements, such as reducing element distortion or improving element aspect ratios.
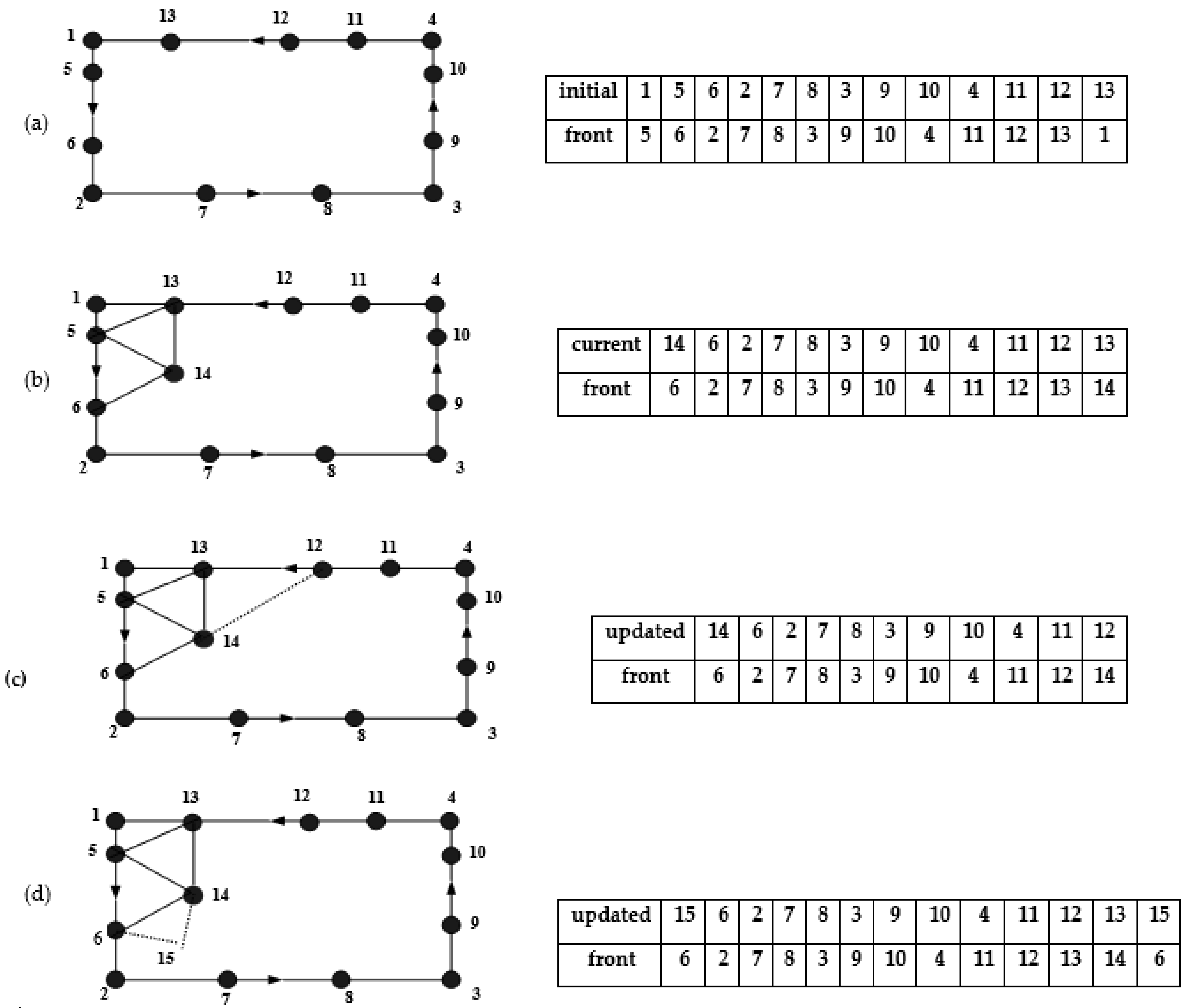
2.5. Generation Front
2.6. Mesh Smoothing
2.7. Smoothing Stresses
2.8. Adaptive Remeshing
2.9. Quarter-Point Singular Element
3. Numerical Results and Discussions
3.1. Compact Tension Specimen
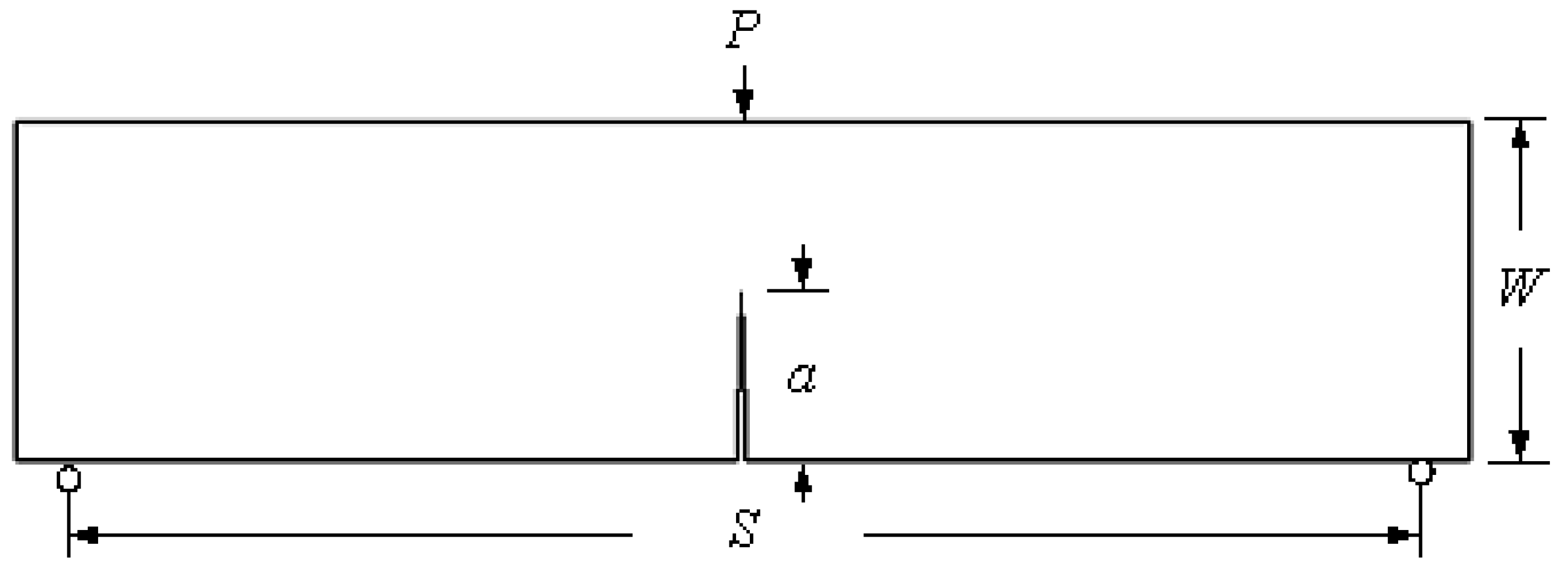
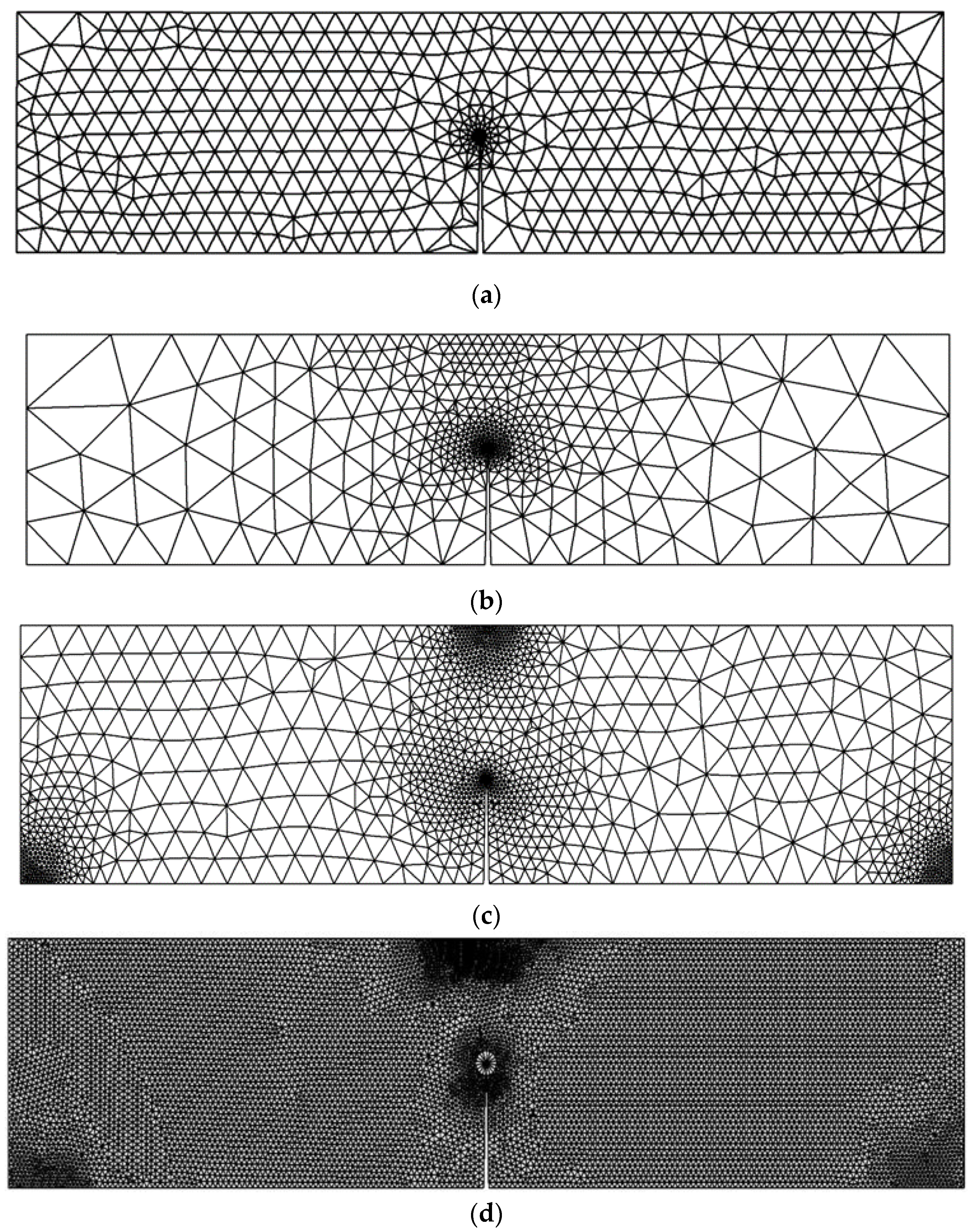
3.2. Three-Point Bend Specimen
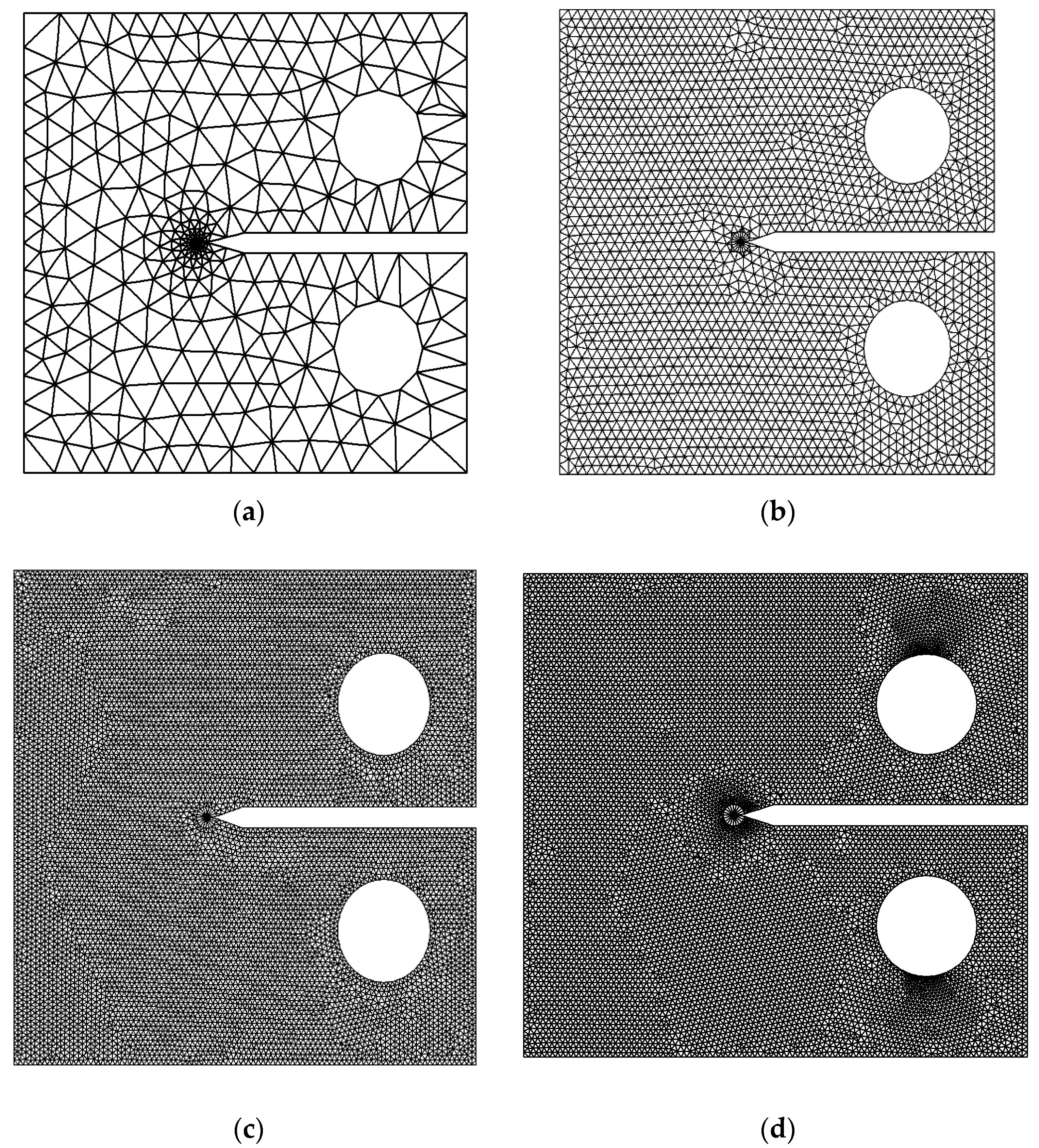
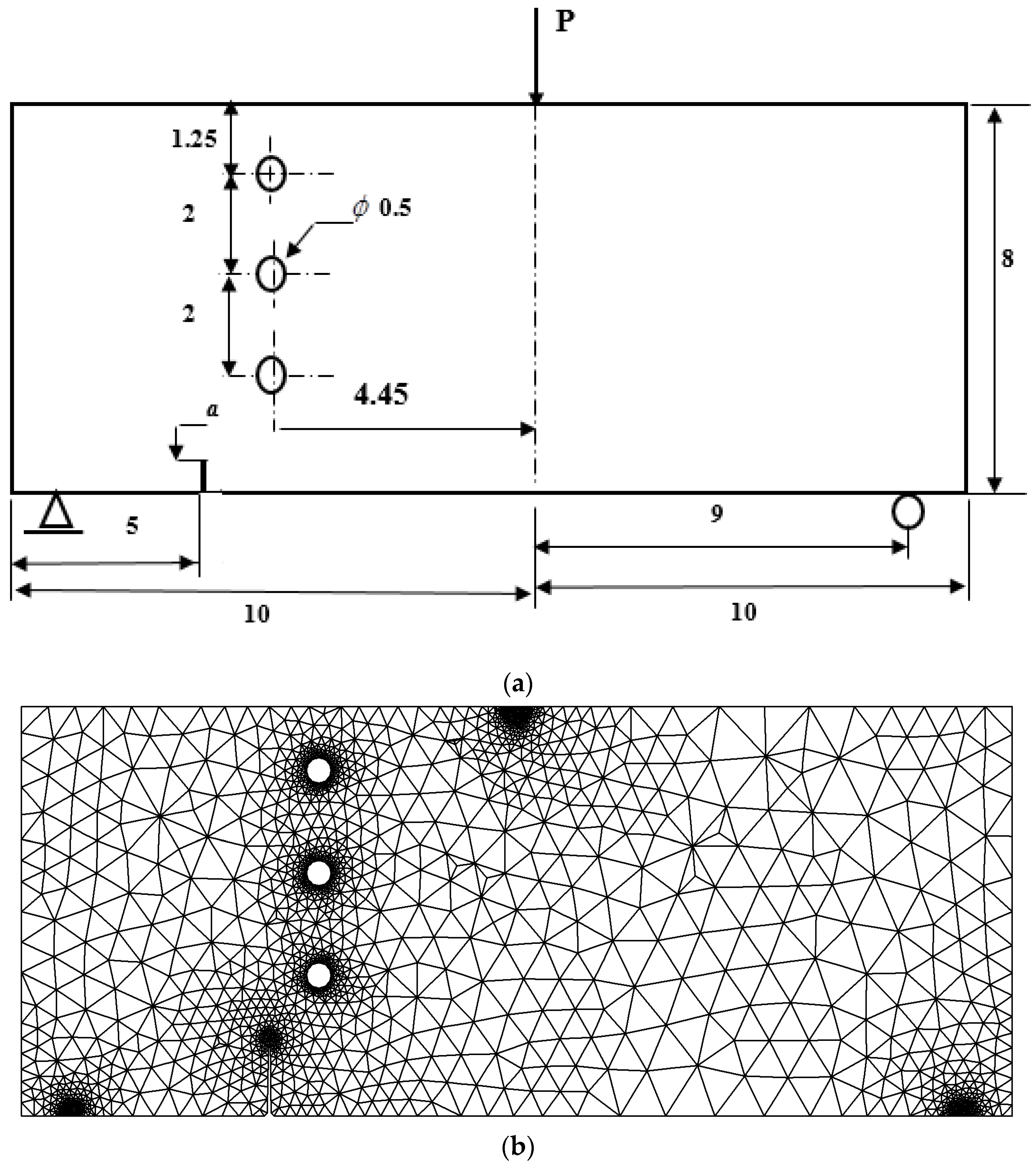
3.3. Three-Point Bending Beam with Three Circular Holes
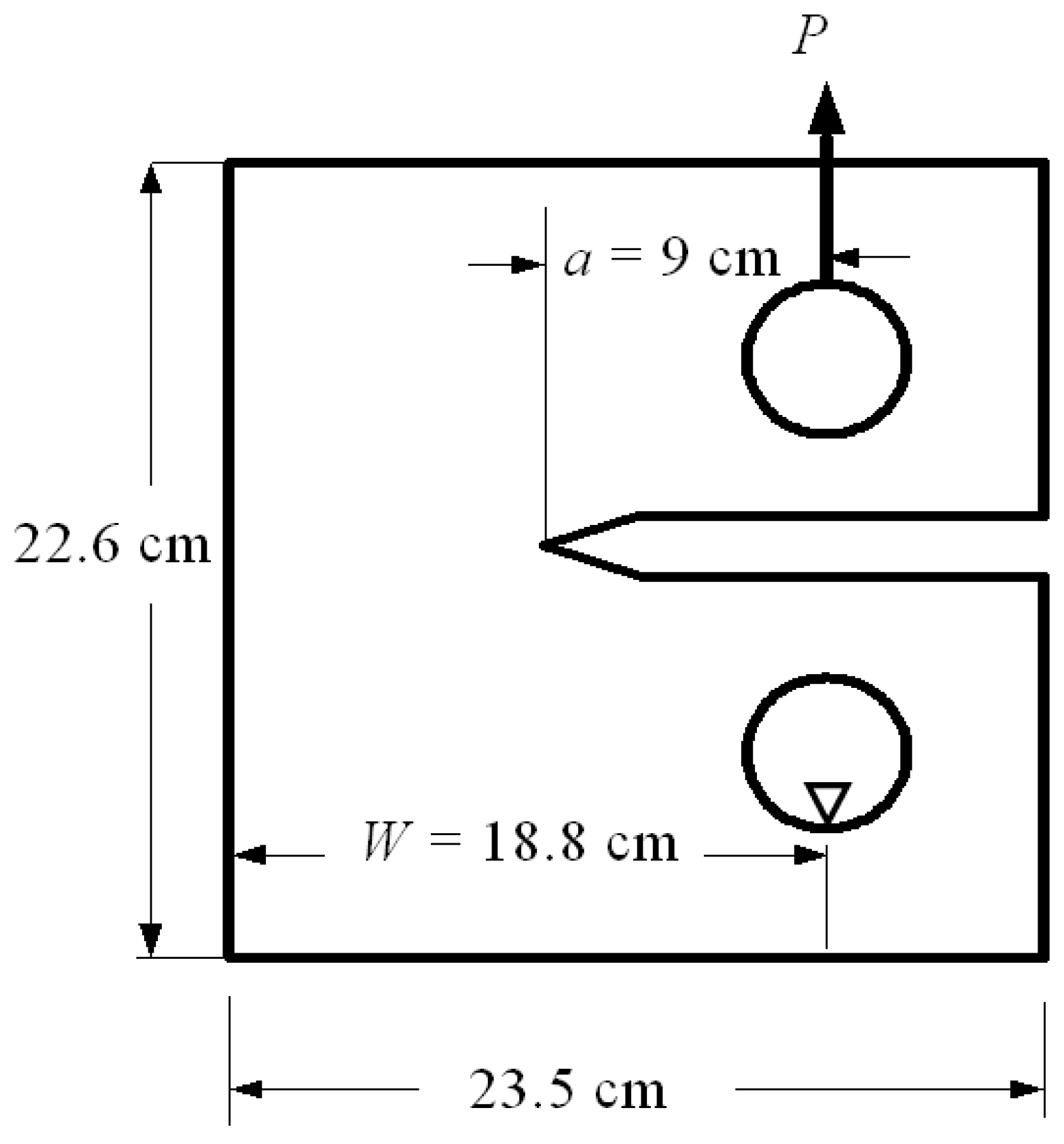
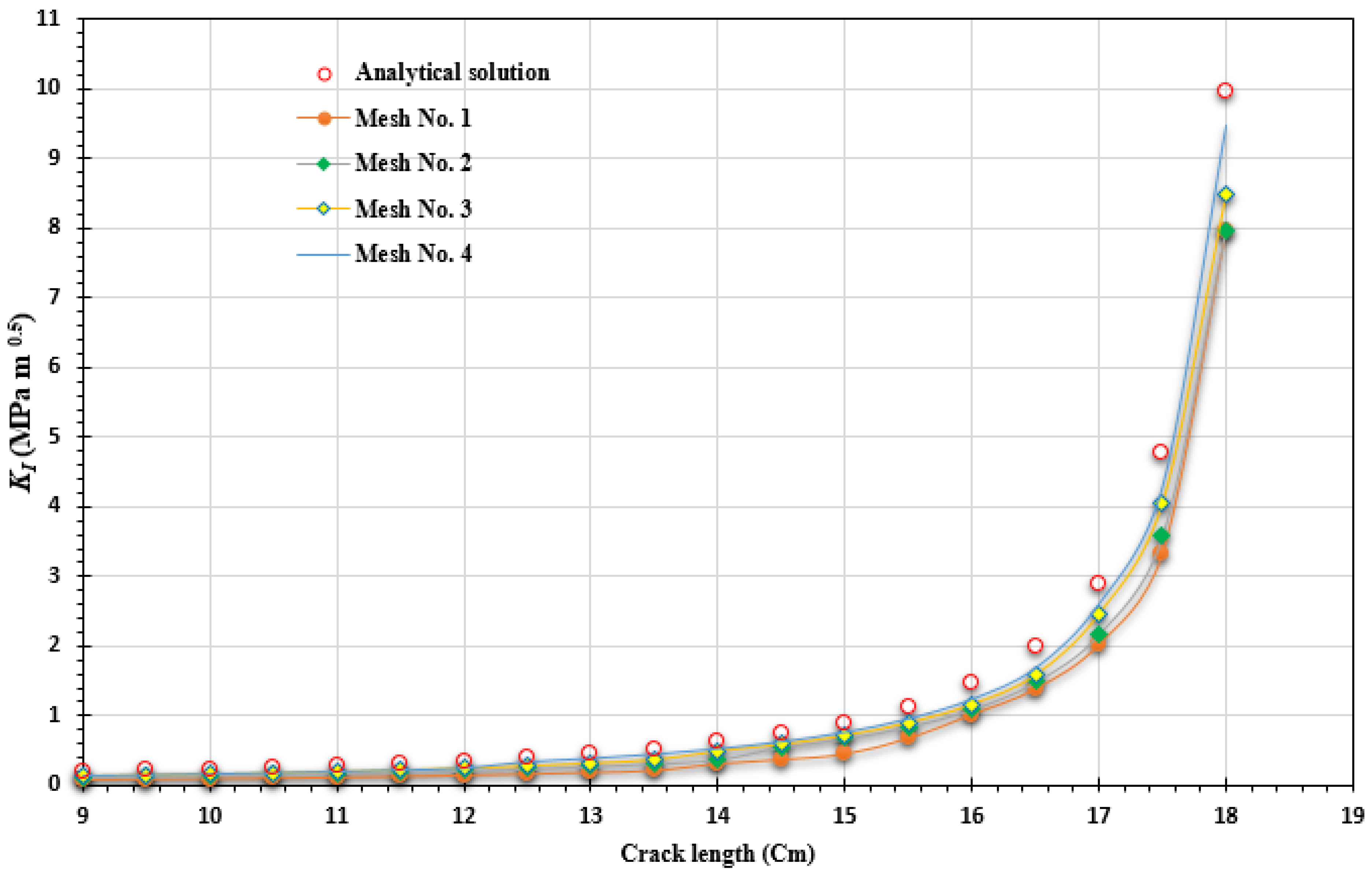
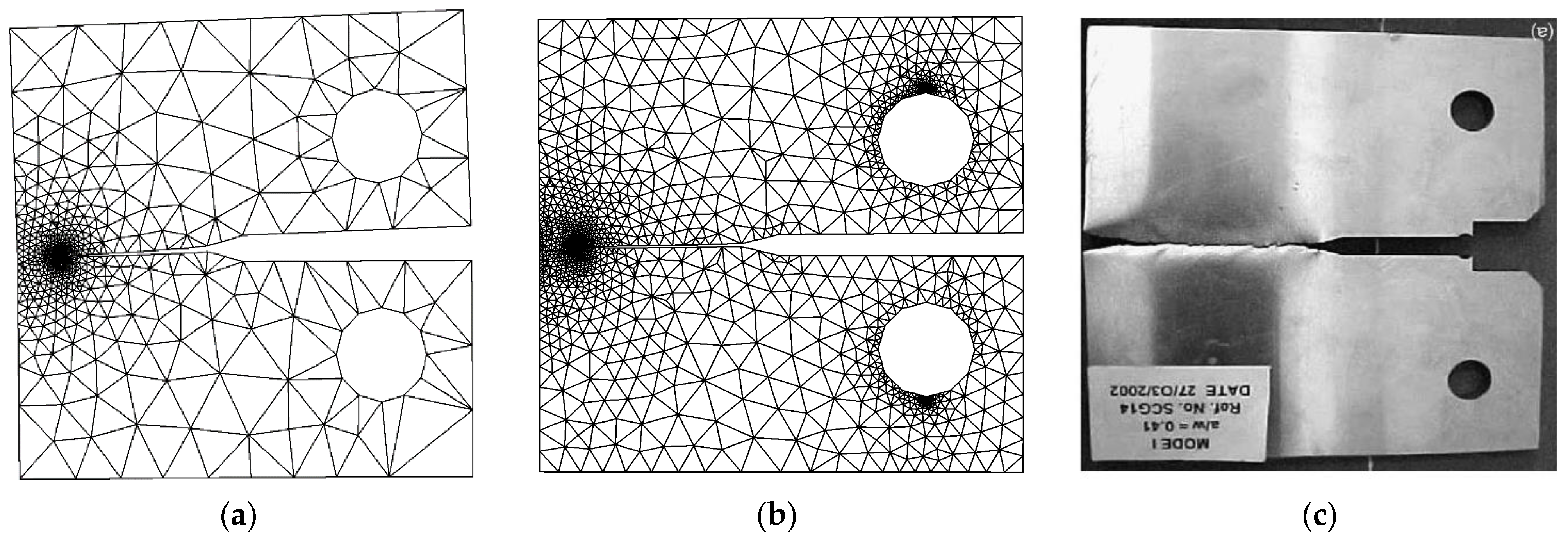
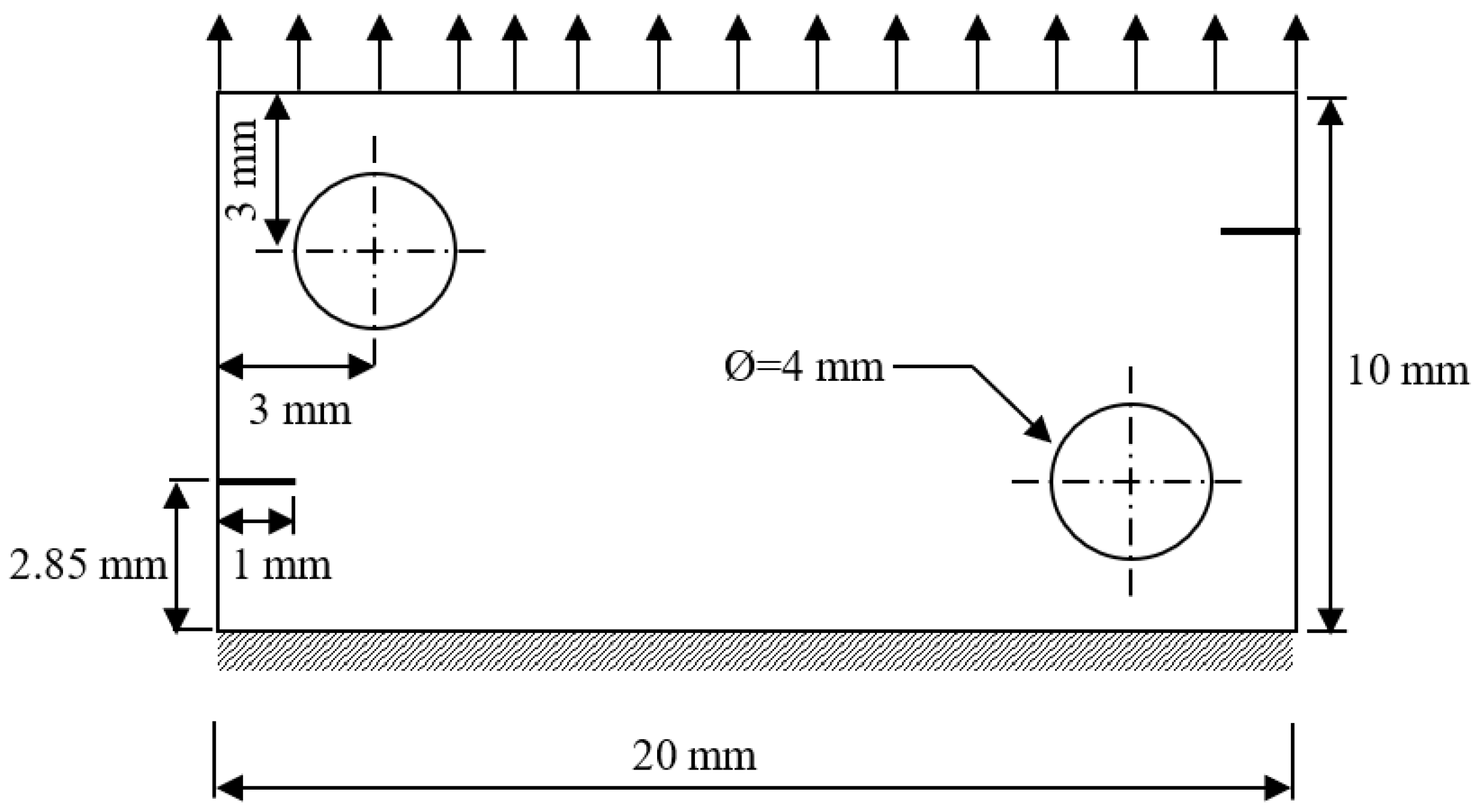
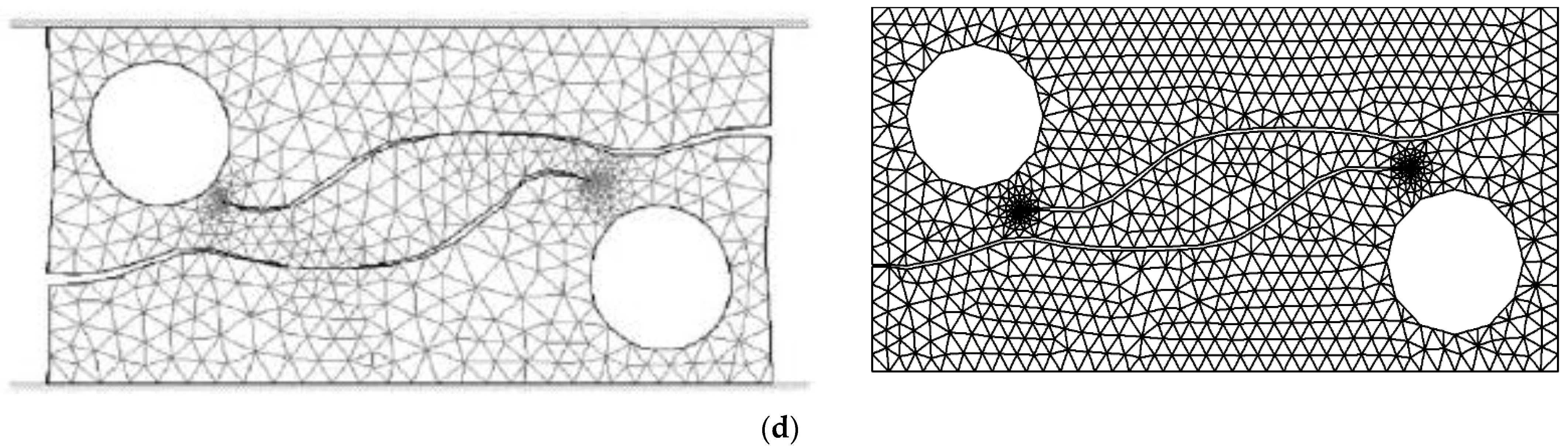
3.4. Double-Edge Cracked Plate with Two Holes
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Uribe-Suárez, D.; Bouchard, P.-O.; Delbo, M.; Pino-Muñoz, D. Numerical modeling of crack propagation with dynamic insertion of cohesive elements. Eng. Fract. Mech. 2020, 227, 106918. [Google Scholar] [CrossRef]
- Liao, M.; Deng, X.; Guo, Z. Crack propagation modelling using the weak form quadrature element method with minimal remeshing. Theor. Appl. Fract. Mech. 2018, 93, 293–301. [Google Scholar] [CrossRef]
- Rice, J.; Sih, G.C. Plane problems of cracks in dissimilar media. J. Appl. Mech. 1965, 32, 418–423. [Google Scholar] [CrossRef]
- Alshoaibi, A.M. Comprehensive comparisons of two and three dimensional numerical estimation of stress intensity factors and crack propagation in linear elastic analysis. Int. J. Integr. Eng. 2019, 11, 45–52. [Google Scholar] [CrossRef]
- Alshoaibi, A.M.; Ariffin, A. Fatigue life and crack path prediction in 2D structural components using an adaptive finite element strategy. Int. J. Mech. Mater. Eng. 2008, 3, 97–104. [Google Scholar]
- Alshoaibi, A.M.; Fageehi, Y.A. Adaptive Finite Element Model for Simulating Crack Growth in the Presence of Holes. Materials 2021, 14, 5224. [Google Scholar] [CrossRef] [PubMed]
- Areias, P.; Rabczuk, T.; Dias-da-Costa, D. Element-wise fracture algorithm based on rotation of edges. Eng. Fract. Mech. 2013, 110, 113–137. [Google Scholar] [CrossRef]
- Moës, N.; Dolbow, J.; Belytschko, T. A finite element method for crack growth without remeshing. Int. J. Numer. Methods Eng. 1999, 46, 131–150. [Google Scholar] [CrossRef]
- Sukumar, N.; Chopp, D.L.; Moës, N.; Belytschko, T. Modeling holes and inclusions by level sets in the extended finite-element method. Comput. Methods Appl. Mech. Eng. 2001, 190, 6183–6200. [Google Scholar] [CrossRef]
- Kuna, M. Finite elements in fracture mechanics. Solid Mech. Its Appl. 2013, 201, 153–192. [Google Scholar]
- Yanagimoto, F.; Shibanuma, K.; Nishioka, Y.; Shirai, Y.; Suzuki, K.; Matsumoto, T. Local stress evaluation of rapid crack propagation in finite element analyses. Int. J. Solids Struct. 2018, 144, 66–77. [Google Scholar] [CrossRef]
- Wawrzynek, P.A.; Ingraffea, A.R. An interactive approach to local remeshing around a propagating crack. Finite Elem. Anal. Des. 1989, 5, 87–96. [Google Scholar] [CrossRef]
- Yang, F.; Rassineux, A.; Labergere, C.; Saanouni, K. A 3D h-adaptive local remeshing technique for simulating the initiation and propagation of cracks in ductile materials. Comput. Methods Appl. Mech. Eng. 2018, 330, 102–122. [Google Scholar] [CrossRef]
- Hu, X.; Yao, W. A new enriched finite element for fatigue crack growth. Int. J. Fatigue 2013, 48, 247–256. [Google Scholar] [CrossRef]
- Rashnooie, R.; Zeinoddini, M.; Ahmadpour, F.; Aval, S.B.; Chen, T. A coupled XFEM fatigue modelling of crack growth, delamination and bridging in FRP strengthened metallic plates. Eng. Fract. Mech. 2023, 279, 109017. [Google Scholar] [CrossRef]
- Xing, C.; Zhou, C.; Sun, Y. A singular crack tip element based on sub-partition and XFEM for modeling crack growth in plates and shells. Finite Elem. Anal. Des. 2023, 215, 103890. [Google Scholar] [CrossRef]
- Golahmar, A.; Niordson, C.F.; Martínez-Pañeda, E. A phase field model for high-cycle fatigue: Total-life analysis. Int. J. Fatigue 2023, 170, 107558. [Google Scholar] [CrossRef]
- Lo, Y.-S.; Hughes, T.J.; Landis, C.M. Phase-field fracture modeling for large structures. J. Mech. Phys. Solids 2023, 171, 105118. [Google Scholar] [CrossRef]
- Taylor, R.; Zienkiewicz, O. The Finite Element Method; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R.L.; Zhu, J.Z. The Finite Element Method: Its Basis and Fundamentals; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Lo, S. Dynamic grid for mesh generation by the advancing front method. Comput. Struct. 2013, 123, 15–27. [Google Scholar] [CrossRef]
- Cheng, S.-W.; Dey, T.K.; Shewchuk, J. Delaunay Mesh Generation; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Wang, C.; Ping, X.; Wang, X. An adaptive finite element method for crack propagation based on a multifunctional super singular element. Int. J. Mech. Sci. 2023, 247, 108191. [Google Scholar] [CrossRef]
- Areias, P.; Msekh, M.; Rabczuk, T. Damage and fracture algorithm using the screened Poisson equation and local remeshing. Eng. Fract. Mech. 2016, 158, 116–143. [Google Scholar] [CrossRef]
- Areias, P.; Reinoso, J.; Camanho, P.; De Sá, J.C.; Rabczuk, T. Effective 2D and 3D crack propagation with local mesh refinement and the screened Poisson equation. Eng. Fract. Mech. 2018, 189, 339–360. [Google Scholar] [CrossRef]
- Nguyen-Xuan, H.; Liu, G.; Bordas, S.; Natarajan, S.; Rabczuk, T. An adaptive singular ES-FEM for mechanics problems with singular field of arbitrary order. Comput. Methods Appl. Mech. Eng. 2013, 253, 252–273. [Google Scholar] [CrossRef]
- Bittencourt, T.; Wawrzynek, P.; Ingraffea, A.; Sousa, J. Quasi-automatic simulation of crack propagation for 2D LEFM problems. Eng. Fract. Mech. 1996, 55, 321–334. [Google Scholar] [CrossRef]
- Bouchard, P.-O.; Bay, F.; Chastel, Y.; Tovena, I. Crack propagation modelling using an advanced remeshing technique. Comput. Methods Appl. Mech. Eng. 2000, 189, 723–742. [Google Scholar] [CrossRef]
- Park, K.; Paulino, G.H.; Celes, W.; Espinha, R. Adaptive mesh refinement and coarsening for cohesive zone modeling of dynamic fracture. Int. J. Numer. Methods Eng. 2012, 92, 1–35. [Google Scholar] [CrossRef]
- Khoei, A.; Azadi, H.; Moslemi, H. Modeling of crack propagation via an automatic adaptive mesh refinement based on modified superconvergent patch recovery technique. Eng. Fract. Mech. 2008, 75, 2921–2945. [Google Scholar] [CrossRef]
- Davis, B.; Wawrzynek, P.; Ingraffea, A. 3-D simulation of arbitrary crack growth using an energy-based formulation—Part I: Planar growth. Eng. Fract. Mech. 2014, 115, 204–220. [Google Scholar] [CrossRef]
- Sze, K.; Wang, H.-T. A simple finite element formulation for computing stress singularities at bimaterial interfaces. Finite Elem. Anal. Des. 2000, 35, 97–118. [Google Scholar] [CrossRef]
- Alshoaibi, A.M.; Fageehi, Y.A. A Computational Framework for 2D Crack Growth Based on the Adaptive Finite Element Method. Appl. Sci. 2022, 13, 284. [Google Scholar] [CrossRef]
- Irwin, G.R. Analysis of stresses and strains near the end of a crack transversing a plate. J. Appl. Mech. 1957, 24, 361–364. [Google Scholar] [CrossRef]
- Westergaard, H.M. Bearing pressures and cracks: Bearing pressures through a slightly waved surface or through a nearly flat part of a cylinder, and related problems of cracks. J. Appl. Mech. 1939, 6, A49–A53. [Google Scholar] [CrossRef]
- Perez, N. Linear-elastic fracture mechanics. In Fracture Mechanics; Springer: Berlin/Heidelberg, Germany, 2017; pp. 79–130. [Google Scholar]
- Owen, D.R.J.; Fawkes, A. Engineering Fracture Mechanics: Numerical Methods and Applications; Pineridge Press Ltd.: Swansea, UK, 1983; p. 314. [Google Scholar]
- Zienkiewicz, O.; Phillips, D. An automatic mesh generation scheme for plane and curved surfaces by ‘isoparametric’ co-ordinates. Int. J. Numer. Methods Eng. 1971, 3, 519–528. [Google Scholar] [CrossRef]
- Cavendish, J.C. Automatic triangulation of arbitrary planar domains for the finite element method. Int. J. Numer. Methods Eng. 1974, 8, 679–696. [Google Scholar] [CrossRef]
- Alshoaibi, A.M.; Ariffin, A. Finite element modeling of fatigue crack propagation using a self adaptive mesh strategy. Int. Rev. Mech. Eng. (IREME) 2008, 2, 537–544. [Google Scholar] [CrossRef]
- Alshoaibi, A.M.; Fageehi, Y.A. 2D finite element simulation of mixed mode fatigue crack propagation for CTS specimen. J. Mater. Res. Technol. 2020, 9, 7850–7861. [Google Scholar] [CrossRef]
- Alshoaibi, A.M.; Fageehi, Y.A. Simulation of Quasi-Static Crack Propagation by Adaptive Finite Element Method. Metals 2021, 11, 98. [Google Scholar] [CrossRef]
- Alshoaibi, A.M.; Hadi, M.; Ariffin, A. An adaptive finite element procedure for crack propagation analysis. J. Zhejiang Univ.-Sci. A 2007, 8, 228–236. [Google Scholar] [CrossRef]
- Alshoaibi, A.M. Finite element procedures for the numerical simulation of fatigue crack propagation under mixed mode loading. Struct. Eng. Mech. 2010, 35, 283–299. [Google Scholar] [CrossRef]
- Freese, C.; Tracey, D. The natural isoparametric triangle versus collapsed quadrilateral for elastic crack analysis. Int. J. Fract. 1976, 12, 767–770. [Google Scholar] [CrossRef]
- Alshoaibi, A.M.; Bashiri, A.H. Adaptive finite element modeling of linear elastic fatigue crack growth. Materials 2022, 15, 7632. [Google Scholar] [CrossRef] [PubMed]
- Bashiri, A.H.; Alshoaibi, A.M. Adaptive Finite Element Prediction of Fatigue Life and Crack Path in 2D Structural Components. Metals 2020, 10, 1316. [Google Scholar] [CrossRef]
- Anderson, T.L. Fracture Mechanics: Fundamentals and Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Parnas, L.; Bilir, Ö.G.; Tezcan, E. Strain gage methods for measurement of opening mode stress intensity factor. Eng. Fract. Mech. 1996, 55, 485–492. [Google Scholar] [CrossRef]
- Mourad, A.; Alghafri, M.; Zeid, O.A.; Maiti, S. Experimental investigation on ductile stable crack growth emanating from wire-cut notch in AISI 4340 steel. Nucl. Eng. Des. 2005, 235, 637–647. [Google Scholar] [CrossRef]
- Broek, D. Elementary Engineering Fracture Mechanics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Wei, J.; Zhao, J. A two-strain-gage technique for determining mode I stress-intensity factor. Theor. Appl. Fract. Mech. 1997, 28, 135–140. [Google Scholar] [CrossRef]
- Ingraffea, A.R.; Grigoriu, M. Probabilistic Fracture Mechanics: A Validation of Predictive Capability; Cornell University, Department of Structural Engineering: Ithaca, NY, USA, 1990. [Google Scholar]
- Mohmadsalehi, M.; Soghrati, S. An automated mesh generation algorithm for simulating complex crack growth problems. Comput. Methods Appl. Mech. Eng. 2022, 398, 115015. [Google Scholar] [CrossRef]
- Bouchard, P.-O.; Bay, F.; Chastel, Y. Numerical modelling of crack propagation: Automatic remeshing and comparison of different criteria. Comput. Methods Appl. Mech. Eng. 2003, 192, 3887–3908. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | dV | ||
|---|---|---|---|
| Plane stress | |||
| Plane strain |
| Mesh Density | Number of Elements | Number of Nodes | Computational Time |
|---|---|---|---|
| Coarse mesh | 1742 | 3600 | 12 min |
| Medium mesh | 3641 | 7423 | 27 min |
| Fine mesh | 4523 | 9488 | 54 min |
| Ultra-fine mesh | 7254 | 15,362 | 90 min |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshoaibi, A.M.; Fageehi, Y.A. A Robust Adaptive Mesh Generation Algorithm: A Solution for Simulating 2D Crack Growth Problems. Materials 2023, 16, 6481. https://doi.org/10.3390/ma16196481
Alshoaibi AM, Fageehi YA. A Robust Adaptive Mesh Generation Algorithm: A Solution for Simulating 2D Crack Growth Problems. Materials. 2023; 16(19):6481. https://doi.org/10.3390/ma16196481
Chicago/Turabian StyleAlshoaibi, Abdulnaser M., and Yahya Ali Fageehi. 2023. "A Robust Adaptive Mesh Generation Algorithm: A Solution for Simulating 2D Crack Growth Problems" Materials 16, no. 19: 6481. https://doi.org/10.3390/ma16196481
APA StyleAlshoaibi, A. M., & Fageehi, Y. A. (2023). A Robust Adaptive Mesh Generation Algorithm: A Solution for Simulating 2D Crack Growth Problems. Materials, 16(19), 6481. https://doi.org/10.3390/ma16196481