
Critical Review on Magnetically Impelled Arc Butt Welding: Challenges, Perspectives and Industrial Applications

 , and
, and 
Abstract
:1. Introduction
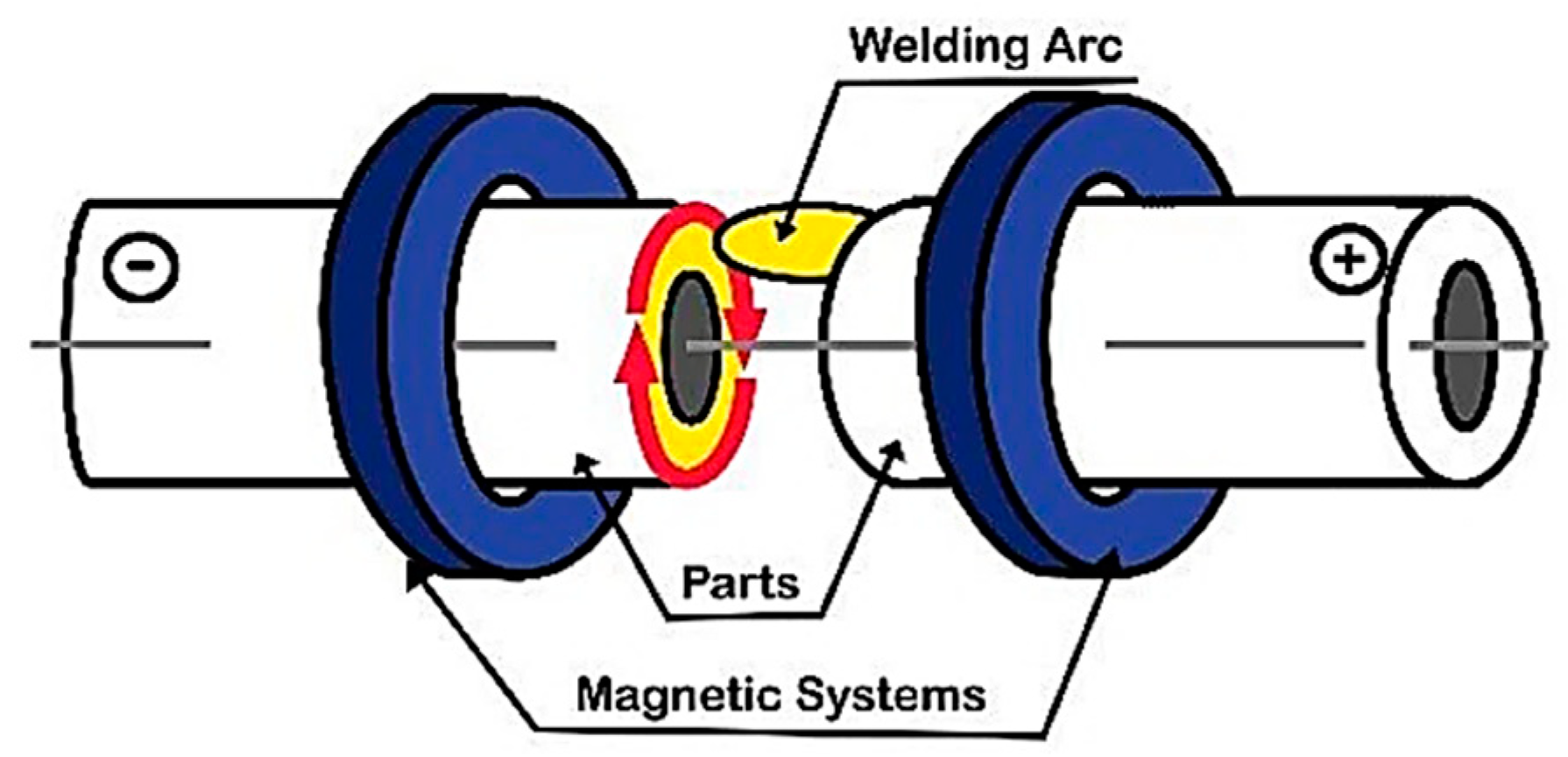
2. Key Factors in the MIAB-Welding Process
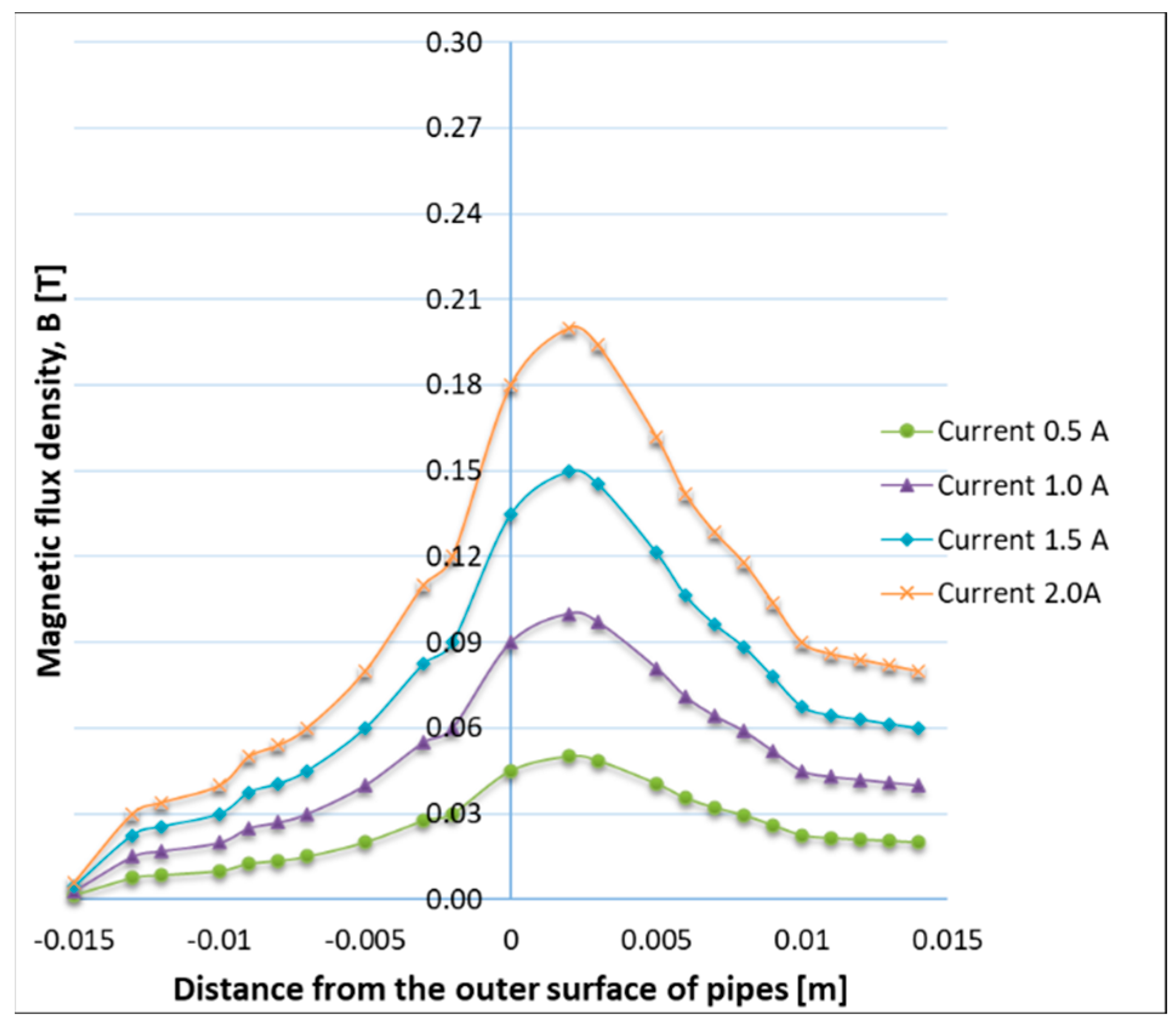
2.1. Magnetic Flux Distribution
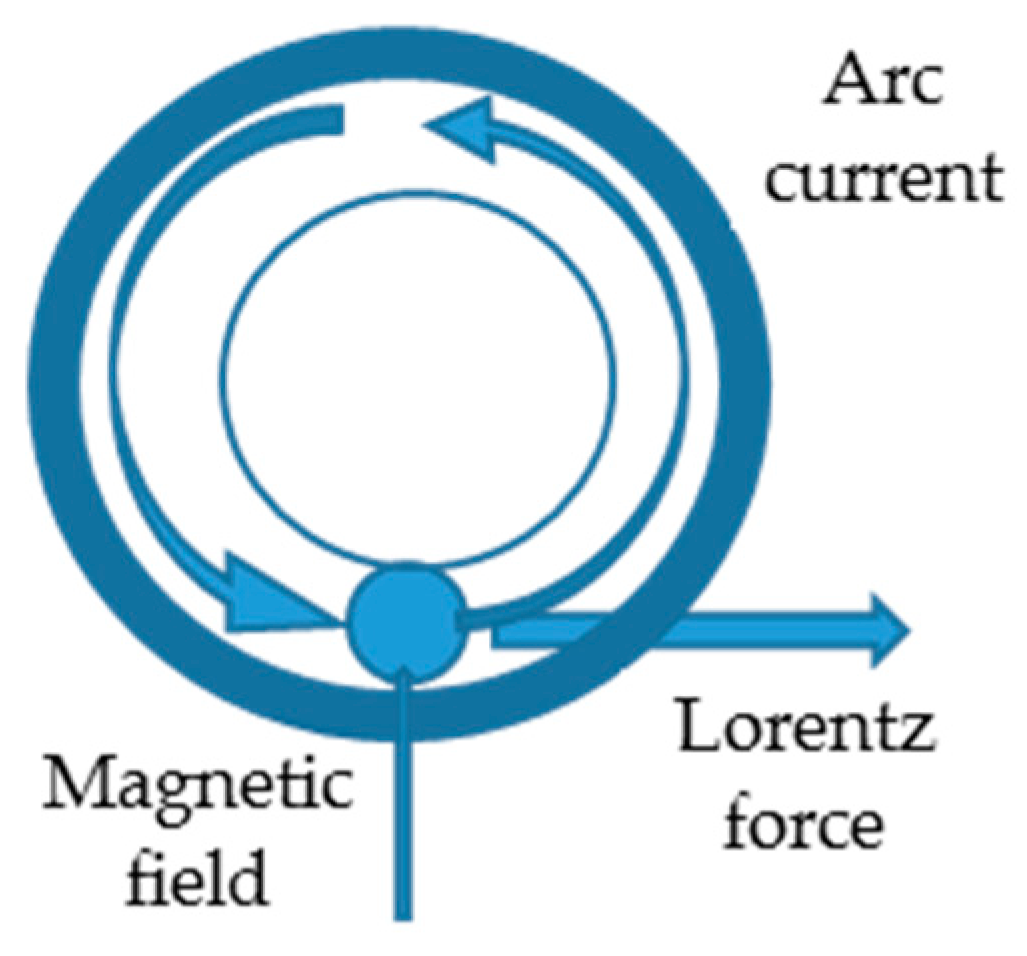
2.2. Arc Rotation
2.3. Arc Velocity
- The arc initiates with a low velocity and increases gradually to 10 m/s.
- The arc reaches the high velocity of nearly 55 m/s with negligible fluctuation.
- The arc has severe velocity fluctuations, depending on the current values and flux density, roughly in the range of 55 to 200 m/s.
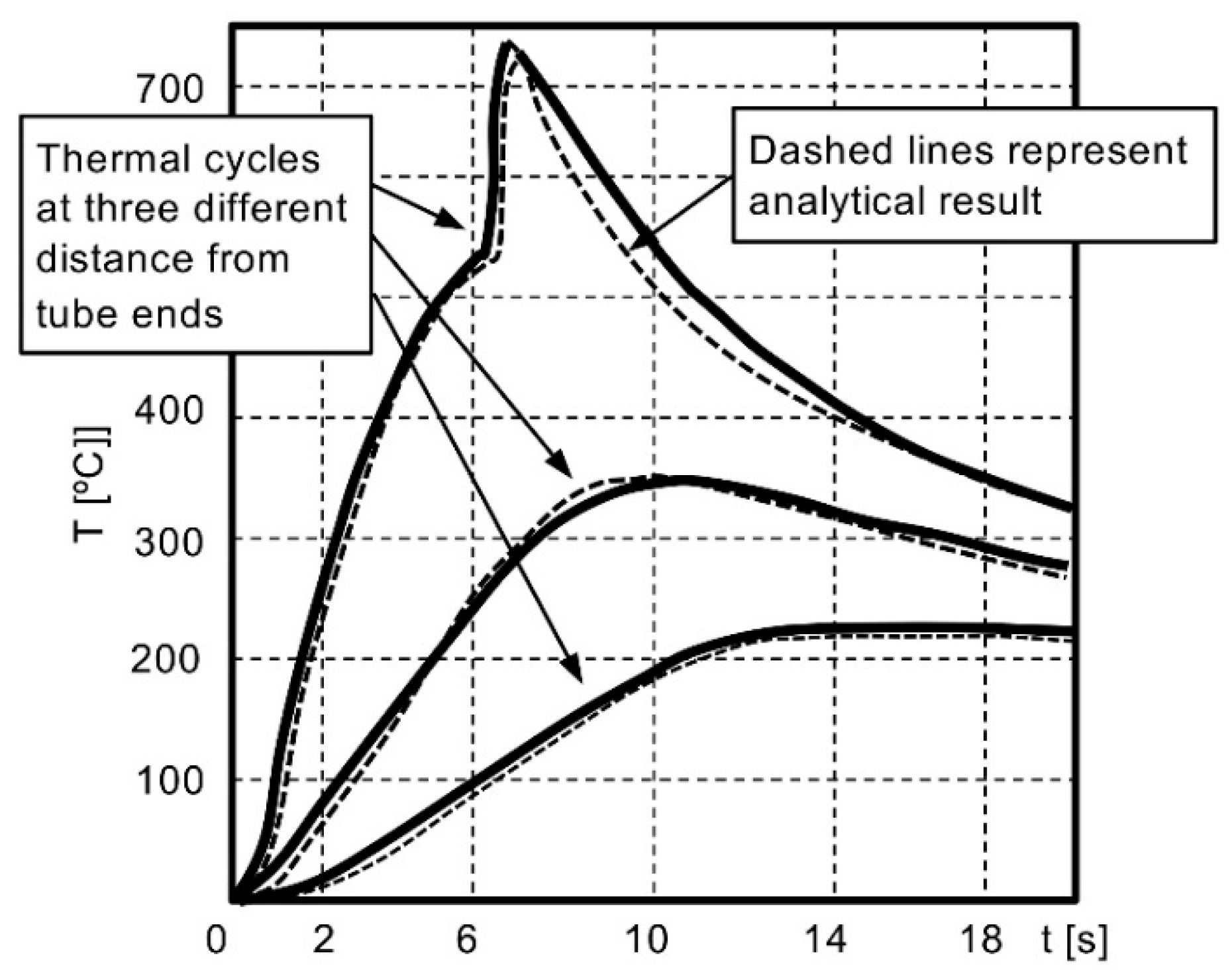
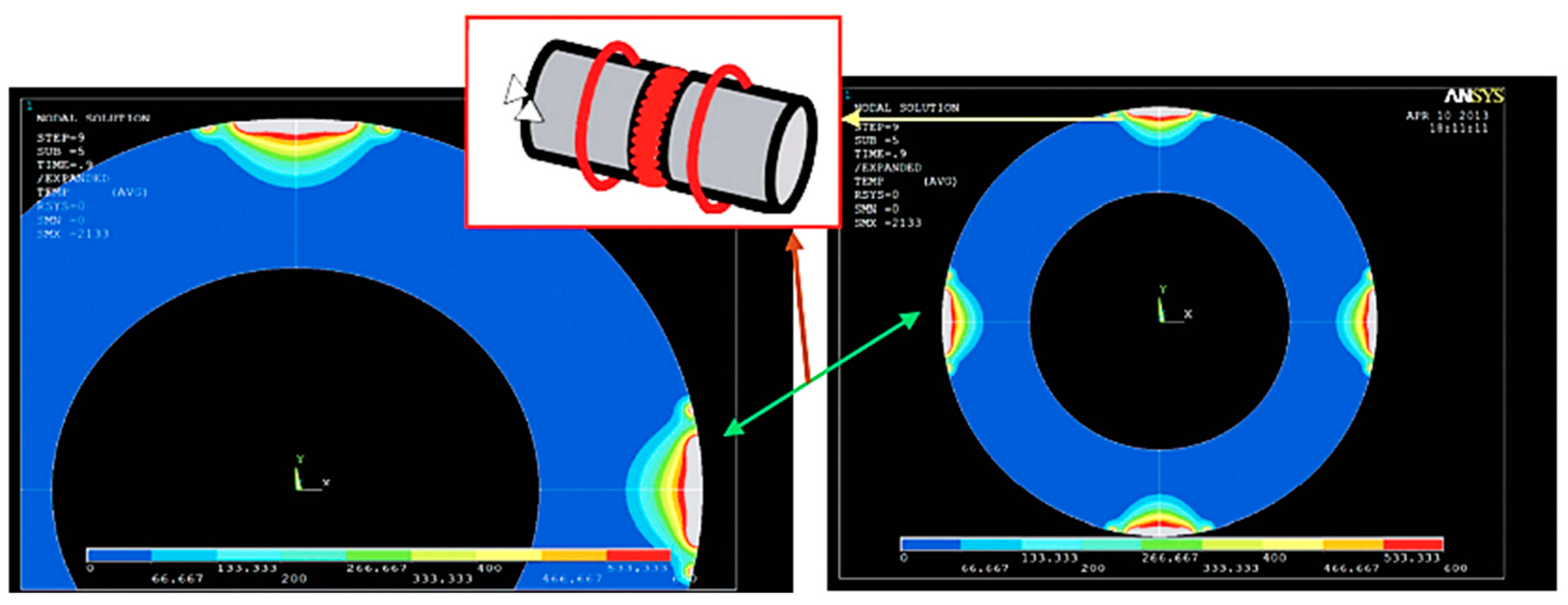
2.4. Heat Transfer during MIAB-Welding Process
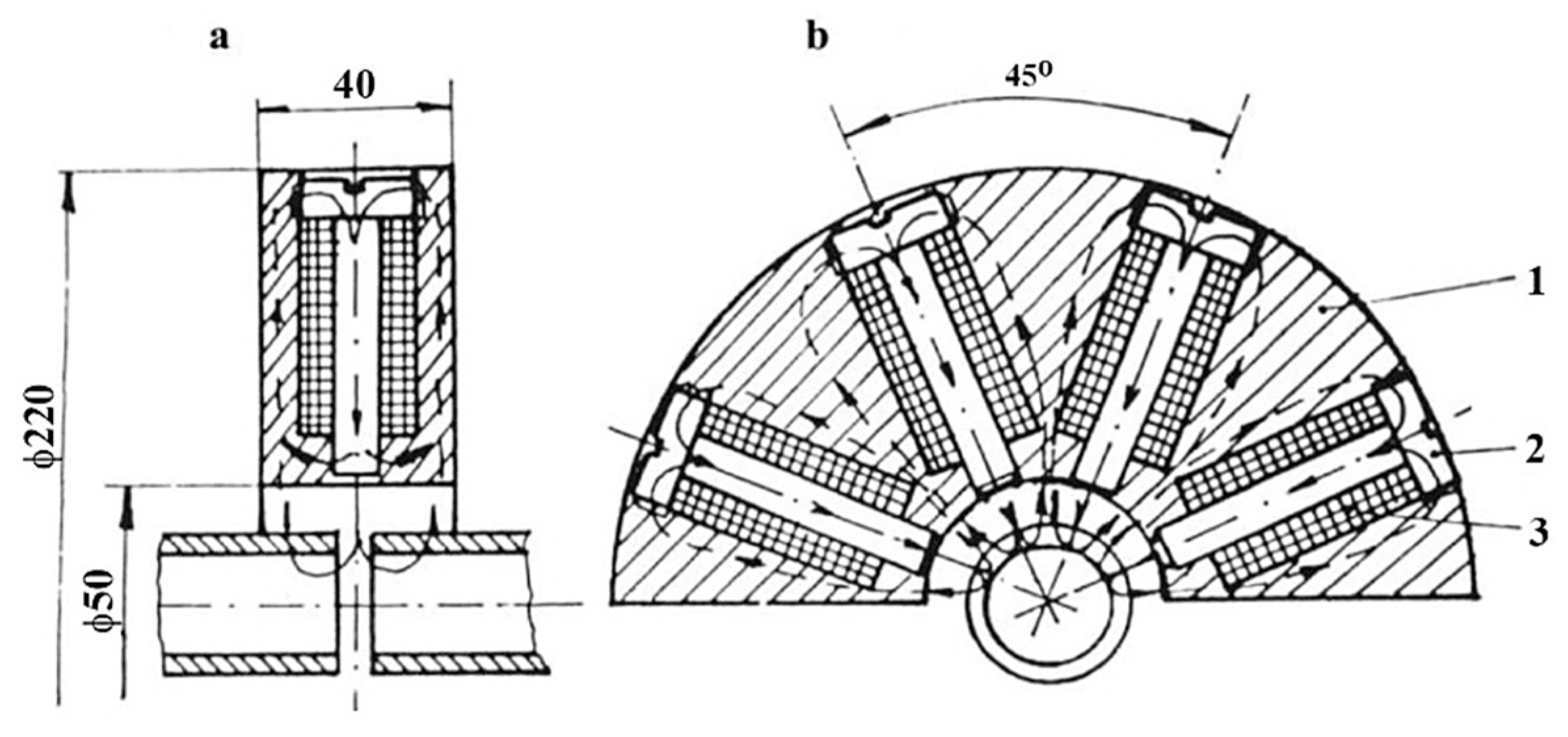
3. Equipment Used in MIAB Welding
- Mechanical solution: one tube is fixed and the other, coupled with an engine, rotates around the other with an amplitude similar to the wall thickness. The orbiting frequency was suggested to be maintained at nearly 1/100th of the arc rotation frequency, so that, during the heating phase, the arc is distributed across the entire wall thickness of both tube faces. Following the heating, the two surfaces are rapidly aligned to be efficiently forged, and, further, welded together.
- Electromagnetic solution: positioning the conductor inside the tubes to be welded. The interaction of the magnetic fields determines the arc movement across the tube ends, and then the uniform heating.
- Significant axial magnetic field: the magnetic field can be adjusted to obtain a stronger axial component than the radial one. The axial component of the magnetic field, in interaction with the radial current component, produces a greater force on the arc, pushing it towards the tube OD, and heating the faying surfaces. After the required heating is achieved, the current and the pressure force are changed, such that the arc scans through the faying surface and moves to the inner diameter prior to the upset phase [9].
4. Experimental, Parametric and Numerical Analysis
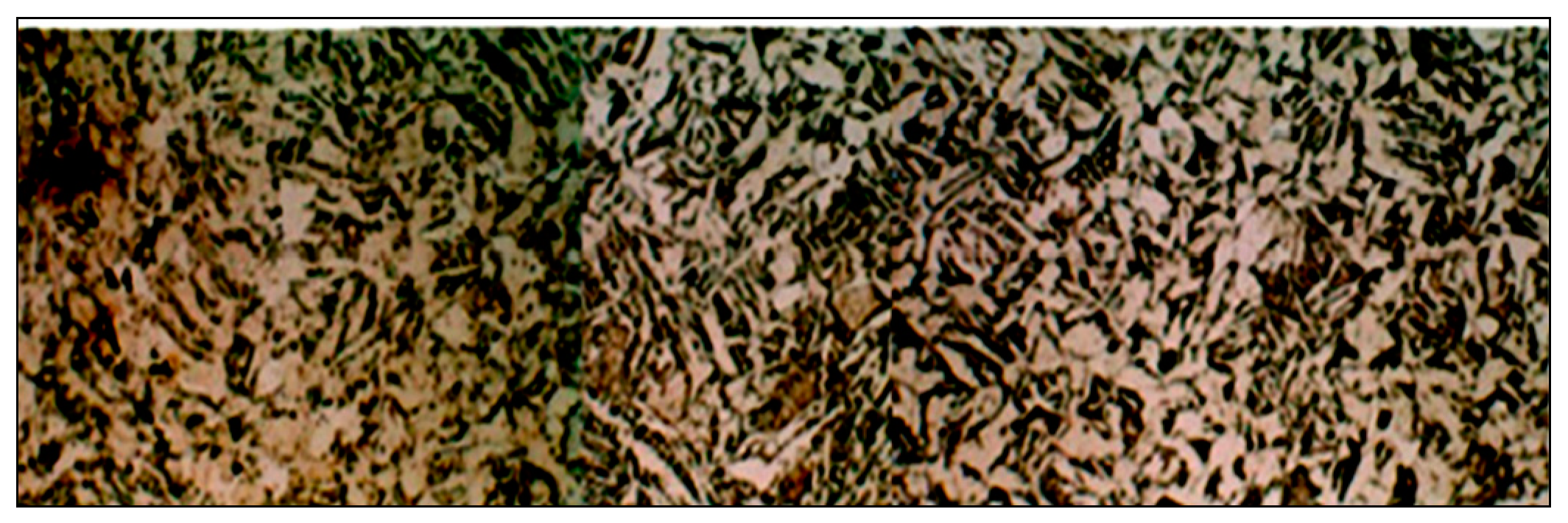
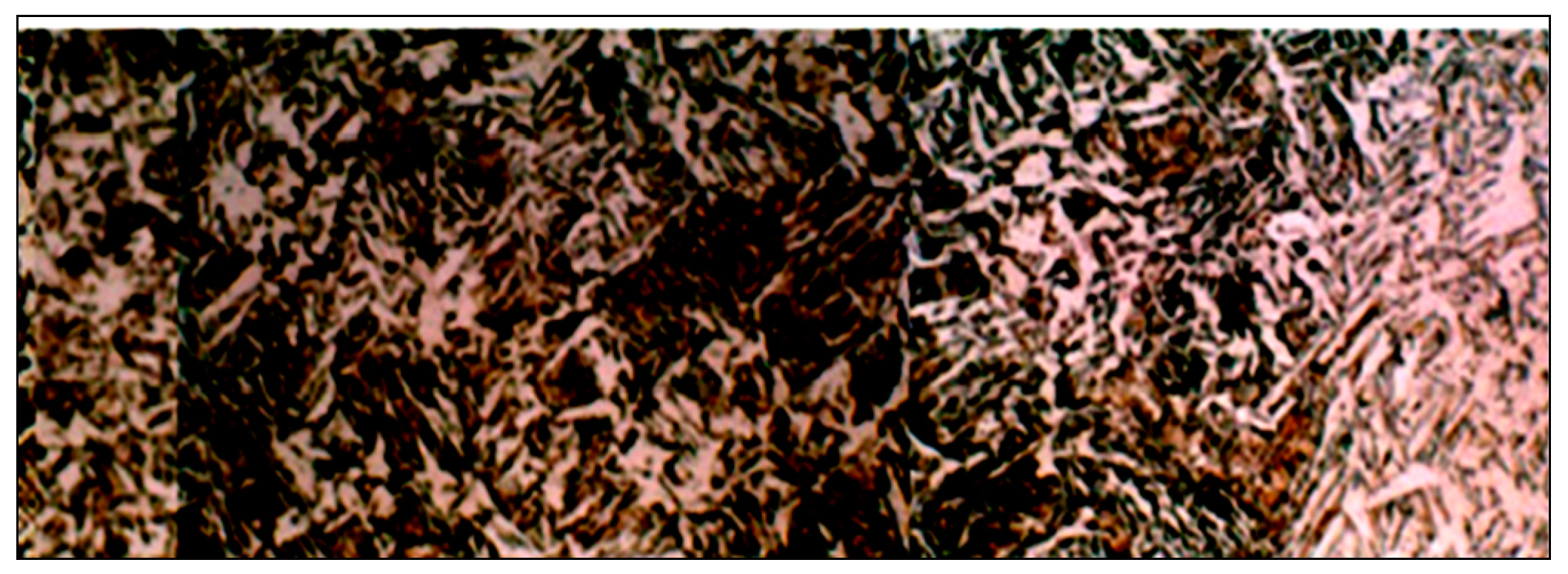
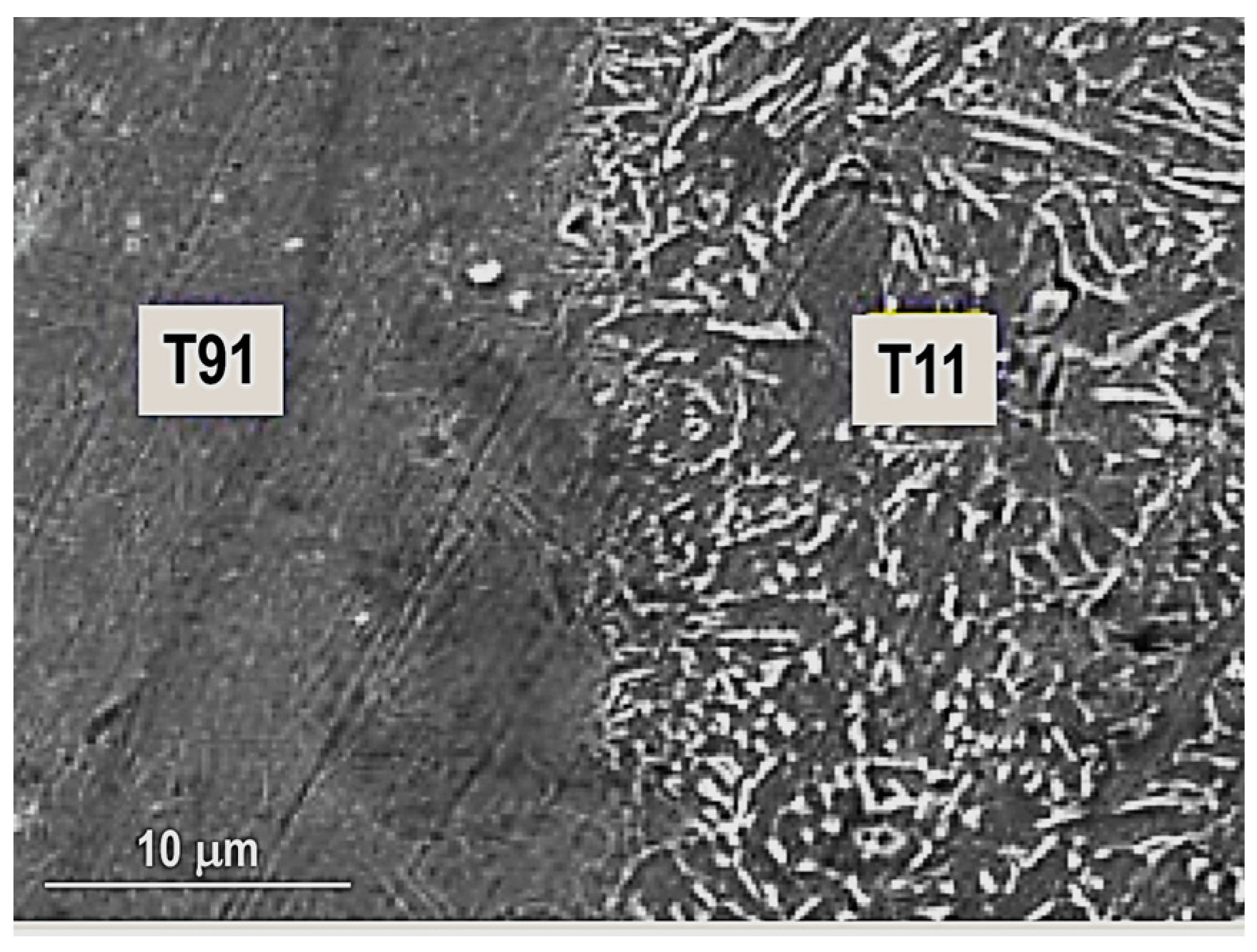
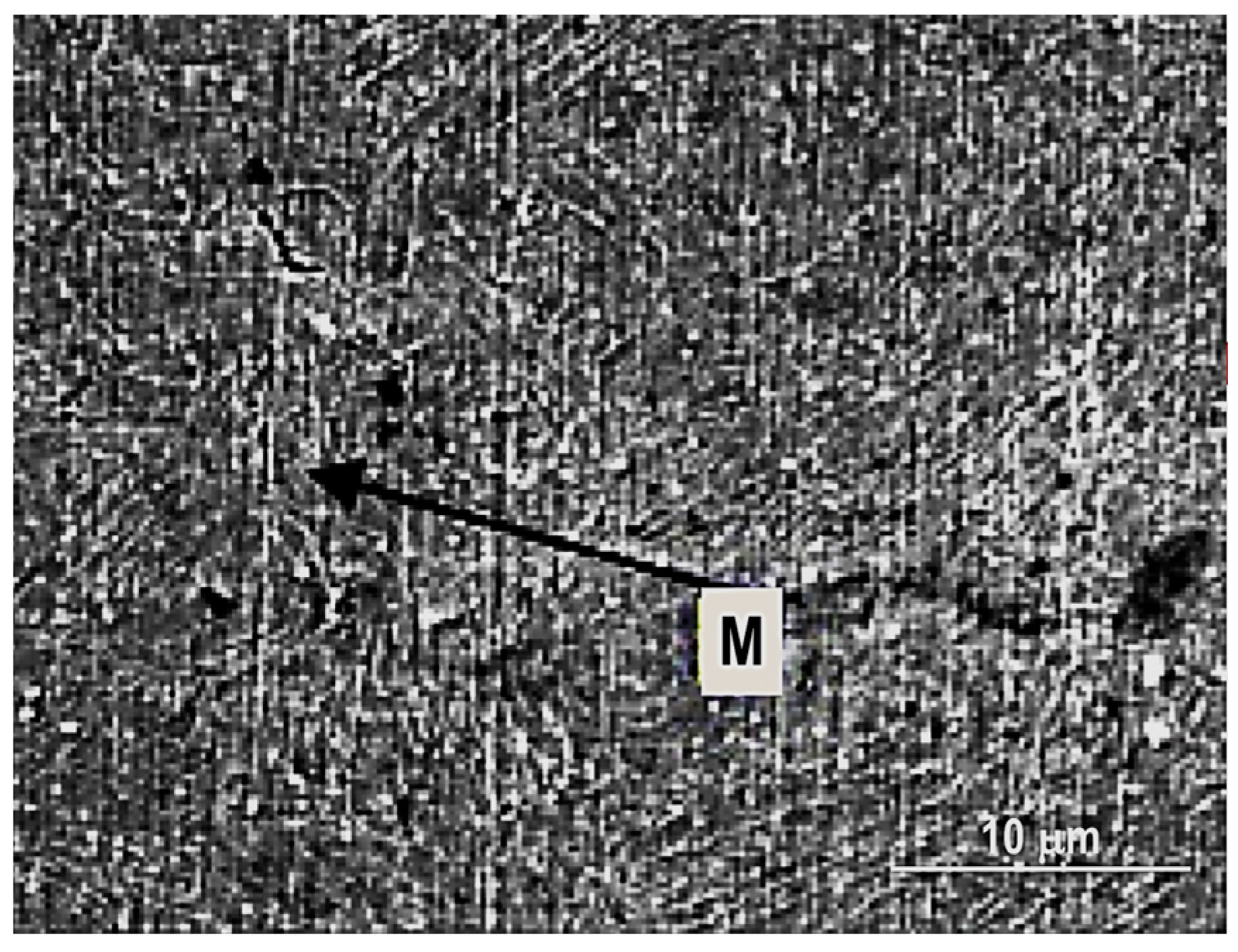
5. Characterisation of MIAB-Welded Joints
6. Industrial Applications
6.1. Automotive Industry
6.2. Tubular Elements Used for Pressure Components
6.3. Oil and Gas Pipelines
7. Conclusions
- Short welding cycle.
- No rotation of parts to be welded, so the alignment can be maintained.
- Uniform heating of the joint results in low distortion.
- Welding a wide variety of ferrous and non-ferrous materials.
- Minimum loss of material.
- Low residual stresses.
- No shielding gas requirement.
- Low energy requirement and, consequently, cost-effectiveness.
- No formation of intermetallic in the fusion zone.
- No melting and, therefore, no significant change in material properties.
- High potential to automate the process and, subsequently, high reproducibility of welds.
- Similar strength and ductility properties of welds and base metal.
- No pores, inclusions or other volume defects frequently found in fusion-welded joints.
- Insignificant dimension (no more than half of the pipe wall thickness) of the outer and inner reinforcement, which is uniformly distributed around the perimeter being welded.
- Easy automation and no requirement for a highly skilled operator.
- The preliminary MIAB-welding process setup has undergone significant transformations in terms of the magnetic field arrangement, forging method, and clamping configurations by taking account the material geometry.
- It has been found that the welding current, tube gap, magnetic field density, and arc rotation time are the key governing process parameters that have a strong influence on the metallurgical behaviour on the weld strength.
- Arc current is responsible for required heating of the weld surfaces up to the solidus temperature to achieve the plasticizing of the material, while the upset current affects the expulsion in the upset stage.
- Arc upset current controls the width of the TMAZ in the process as it governs the expulsion of the excess material and the surface impurities. Increased upset current results in reduced width of the TMAZ region.
- It is a challenge to join tubes with a thickness larger than 6 mm. However, several technical solutions to address the issues occurred in this type of applications have been presented in this work.
- The replicability remains a challenge in case of several industrial applications due to the variation of process parameters and welding conditions.
- Oil and gas pipes with diameters up to DN450 and thicknesses up to 10 mm can be welded using the MIAB technique. High-integrity joints can be fabricated using the MIAB-welding method at extremely high production rates.
- Small wall thickness and low-pressure applications represent the majority of the MIAB-welding applications. According to the studies, the non-ferromagnetic materials, like Al and Cu, were welded using the MIAB method that is currently applied for joining the ferromagnetic materials.
- This technique can be employed for welding several alloy steel grades like T11, T91, mild steel or a combination of these alloys. It is also being explored for welding similar or dissimilar non-ferrous materials such as Al to Al or Al to Cu.
- MIAB welding is an appropriate method for welding, in 10–15 s time, pipes with an outer diameter from 75 mm up to 450 mm and a 10–35 mm wall thickness.
- By implementing this joining procedure, direct labour expenses and labour-related overheads, like training costs, can be significantly reduced.
- Process limitation comes from the arc (of finite width) that is initially rotating on the inner edge and then predominantly on the outer edge of the tube faces. As a predictable result, uneven heating and consequent poor-quality welds are obtained. This radial movement of the arc path occurs no matter the wall thickness, but becomes less consistent when the wall thickness increases above 6 mm.
- An issue encountered in welding thick wall tubes is in ensuring the immediate arc rotation to avoid local melting and the arc short-circuit.
- Three-dimensional FE numerical models to calculate the heat distribution, electromagnetic force distribution, or magnetic flux distribution have not been reported so far.
- No research on the electrical circuit modelling of the MIAB-welding method has been carried out so far.
- There is not yet any available information on the development of a laboratory prototype MIAB-welding module with a compact power supply for comprehending and investigating the impact of different input parameters on the arc rotation.
- The testing standards and codes, specific to testing the MIAB-welded joints, are not yet established for most of the industrial applications.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Westgate, S.A.; Edson, D.A. The MIAB Welding of Tubular Sections for Mass Production Industries. In Proceedings of the SAE International Congress and Exposition, Detroit, MI, USA, 1 March 1986; p. 860582. [Google Scholar]
- Fletcher, L.; Stecher, G.; Stubbs, C.; Norrish, J.; Cuiuri, D.; Moscrop, J. MIAB Welding of Oil and Gas Pipelines. In Volume 3: Materials and Joining; Pipeline Automation and Measurement; Risk and Reliability, Parts A and B; ASMEDC: Calgary, Alberta, Canada, 2006; pp. 643–650. [Google Scholar]
- Vendan, S.A.; Manoharan, S.; Buvanashekaran, G.; Nagamani, C. Magnetically Impelled Arc Butt Welding of Alloy Steel Tubes in Boilers–Establishment of Parameter Window. Mechatronics 2011, 21, 30–37. [Google Scholar] [CrossRef]
- Mori, S.; Yasuda, K. Magnetically Impelled Arc Butt Welding of Aluminium Pipes. Weld. Int. 1989, 3, 941–946. [Google Scholar] [CrossRef]
- Ramesh Kumar, S.; Ravishankar, B.; Vijay, M. Prediction and Analysis of Magnetically Impelled Arc Butt Welded Dissimilar Metal. Mater. Today Proc. 2020, 27, 2037–2041. [Google Scholar] [CrossRef]
- Panda, B.N.; Vendan, S.A.; Garg, A. Experimental- and Numerical-Based Studies for Magnetically Impelled Arc Butt Welding of T11 Chromium Alloy Tubes. Int. J. Adv. Manuf. Technol. 2017, 88, 3499–3506. [Google Scholar] [CrossRef]
- Vignesh, S.; Dinesh Babu, P.; Prasanna Venkatesh, V.; Martin Vinoth, S.; Marimuthu, P. Experimental Investigations on Magnetically Impelled Arc Butt Welded T91 Steel Tubes. Trans. Indian Inst. Met. 2017, 70, 741–748. [Google Scholar] [CrossRef]
- Vendan, S.A.; Manoharan, S.; Buvanashekaran, G.; Nagamani, C. Development of a MIAB Welding Module and Experimental Analysis of Rotational Behavior of Arc—Simulation of Electromagnetic Force Distribution during MIAB Welding of Steel Pipes Using Finite Element Analysis. Int. J. Adv. Manuf. Technol. 2009, 43, 1144–1156. [Google Scholar] [CrossRef]
- Phillips, D.H. Magnetically Impelled Arc Butt (MIAB) Welding of Chromium-Plated Steel Tubular Components Utilizing Arc Voltage Monitoring Techniques. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2008. [Google Scholar]
- Iordachescu, D.; Iordachescu, M.; Georgescu, B.; Miranda, R.M.; Ruiz-Hervias, J.; Ocaña, J.L. Technological Windows for MIAB Welding of Tubes Featuring Original Longitudinal Magnetization System with Peripheral Solenoids. J. Mater. Process. Technol. 2010, 210, 951–960. [Google Scholar] [CrossRef]
- Kachinskiy, V.S.; Krivenko, V.G.; Ignatenko, V.Y. Magnetically Impelled Arc Butt Welding of Hollow and Solid Parts. Weld World 2002, 46, 49–56. [Google Scholar] [CrossRef]
- Vendan, S.A.; Manoharan, S.; Buvanashekaran, G.; Nagamani, C. Magnetic Flux Distribution Modelling of Magnetically-Impelled Arc Butt-Welding of Steel Tubes Using Finite-Element Analysis. Proc. Proc. Inst. Mech. Eng. 2008, 222, 1783–1790. [Google Scholar] [CrossRef]
- Arungalai Vendan, S.; Manoharan, S.; Buvanashekaran, G.; Nagamani, C. Simulation of Magnetic Flux Distribution for Magnetically Impelled Arc Butt Welding of Steel Tubes. Multidiscip. Model. Mater. 2009, 5, 229–234. [Google Scholar] [CrossRef]
- Arungalai Vendan, S.; Thangadurai, V.; Vasudevan, A.; Senthil Kumar, A. Investigations on Temperature Distribution during Revolutionary and Zigzag Movement of Arc in Magnetically Impelled Arc Butt Welding of Tubes. JAE 2014, 46, 155–163. [Google Scholar] [CrossRef]
- Sivasankari, R.; Balusamy, V.; Venkateswaran, P.R.; Kumar, K.G.; Buvanashekaran, G. Light Band Zone Formation and Its Influence on Properties of Magnetically Impelled Arc Butt (MIAB) Welded Carbon Steel Tubes. Trans. Indian Inst. Met. 2018, 71, 351–360. [Google Scholar] [CrossRef]
- Sk, A.K.; Khan, N. An Experimental Investigation of Magnetically Impelled Arc Butt Welding of Pipes: A Review. IJCET 2018, 8, 535–540. [Google Scholar] [CrossRef]
- Singh, P.K.; Singh, R.P. In-Pressure Magnetically Induced Arc Butt Welding of Alloy Steel Tubes. In Recent Advances in Mechanical Engineering; Springer Nature: Singapore, 2023; pp. 1071–1082. [Google Scholar]
- Muneem, A.A.; Laxminarayana, P.; Viquar Mohiuddin, M. Study of Rotating Arc Welding Process for Joining of Pipes: An In-Depth Review. In Recent Advances in Materials Processing and Characterization; Arockiarajan, A., Duraiselvam, M., Raju, R., Reddy, N.S., Satyanarayana, K., Eds.; Lecture Notes in Mechanical Engineering; Springer Nature: Singapore, 2023; pp. 297–310. ISBN 978-981-19534-6-0. [Google Scholar]
- Steffen, W. Pressure Welding of Tubes with a Magnetically Displaced Arc. Schweißen. Schneid. Transl. 1982, 4, E70–E72. [Google Scholar]
- Nentwid, A. Coil Systems, Magnetic Field Distribution and Arc Behaviour in Pressure Welding with Magnetically Impelled Arc. Weld. Cut. 1995, 1, E9–E11. [Google Scholar]
- Kachynskyi, V.; Koval, M.; Klymenko, V. Development of Technology and Creation of Test Equipment for Pressure Welding of High-Load Thin-Walled Heterogeneous Steel Tubular Parts. Sci. Innov. 2021, 17, 3–10. [Google Scholar] [CrossRef]
- Kachinskiy, V. MIAB Welding of Thick-Walled Pipe Ends. Tube Pipe J. 2004. Available online: https://www.thefabricator.com/tubepipejournal/article/tubepipeproduction/miab-welding-of-thick-walled-pipe-ends (accessed on 18 October 2023).
- Sato, T.; Katayama, J.; Ioka, S.; Otani, M. An Experimental Study of Rotational Behaviour of the Arc during Magnetically Impelled Arc Butt Welding. Weld. Int. 1991, 5, 5–10. [Google Scholar] [CrossRef]
- Taneko, A.; Arakida, F.; Takagi, K. Analysis of Arc Rotation Velocity in Magnetically Impelled Arc Butt Welding. Weld. Int. 1987, 1, 247–253. [Google Scholar] [CrossRef]
- Kuchuk-Yatsenko, S.; Syrovatka, V.; Kuznetsov, P. Speed of Movement by an Arc in the Gap between a Tube and a Plate Under the Action of a Magnetic Field. Autom. Weld. 1983, 36, 23–26. [Google Scholar]
- Mosayebnezhad, J.; Sedighi, M. Numerical and Experimental Investigation of Residual Stresses in Magnetically Impelled Arc Butt Welded Joints in Low Alloy Steels. Int. J. Adv. Manuf. Technol. 2018, 96, 4501–4515. [Google Scholar] [CrossRef]
- Loebner, R. Magnetarc Welding Theory and Practice; The Welding Institute: London, UK, 1979; Volume 1, pp. 29–37. [Google Scholar]
- Sathiyaraj, S.; Samuvel, B.M.; Ameer, M.; Marwan, N.M.; Naseef, P.M. Design and Fabrication of Welding Machine with Magnetically Impelled Arc Butt (MIAB). AIP Conf. Proc. 2023, 2523, 020108. [Google Scholar]
- Georgescu, V.; Iordachescu, D.; Georgescu, B. New Equipment for Pressure Welding in Magnetic Forces Field. In Annals of “Dunarea de Jos”; University of Galati Fascicle XII Welding Equipment and Technology: Galați, Romania, 2001. [Google Scholar]
- Georgescu, V.; Iordachescu, D. Original Magnetizing Systems for ROTARC Welding. In Annals of “Dunarea de Jos”; University of Galati Fascicle XII Welding Equipment and Technology: Galați, Romania, 2000; pp. 10–14. [Google Scholar]
- Schlebeck, E. Welding with a Magnetically Moved Arc (MBL Welding): A New Means of Rationalization. In Proceedings of the Fourth International Conference, Harrogate, UK, 9–11 May 1978; pp. 249–256. [Google Scholar]
- Johnson, K.I.; Carter, A.W.; Dinsdale, W.O.; Threadgill, P.L.; Wright, J.A. The Magnetically Impelled Arc Butt Welding of Mild Steel tubing. Weld. J. 1979, 59, 17–27. [Google Scholar]
- Johnson, K.I.; Crafer, R.C.; Edison, D.A. Advances in Laser and MIAB Welding Techniques. Weld. J. 1983, 62, 15–20. [Google Scholar]
- Kim, J.-W.; Choi, D.-H. A Study on the Numerical Analysis of Magnetic Flux Density by a Solenoid for Magnetically Impelled Arc Butt Welding. Proc. Inst. Mech. Eng. B J. Eng. Manuf. 2003, 217, 1401–1407. [Google Scholar] [CrossRef]
- Glickstein, S.S. Arc Modelling for Welding Analysis; United States Department of Energy: West Mifflin, PA, USA, 1979; pp. 1–16. [Google Scholar]
- Arungalai Vendan, S.; Manoharan, S.; Nagamani, C.; Buvanashekaran, G. Experimental and Statistical Analysis of Impact of Various Parameters on Arc Rotation in MIAB Welding Process by Developing a Laboratory Module. Exp. Tech. 2009, 34, 40–48. [Google Scholar] [CrossRef]
- Vendan, S.A.; Manoharan, S.; Buvanashekaran, G.; Nagamani, C. Some Studies on the Electromagnetic Aspects Governing the Magnetically Impelled Arcs through Experimentation, Finite Element Simulation and Statistical Analysis. JAE 2009, 31, 113–126. [Google Scholar] [CrossRef]
- Norrish, J.; Cuiuri, D.; Hossain, M. Modelling and Simulation of the Magnetically Impelled Arc Butt (MIAB) Process for Transmission Pipeline Applicationsprocess for Transmission Pipeline Applications. In Proceedings of the International Pipeline Integrity Conference, Sydney, Australia, 7–9 March 2005. [Google Scholar]
- AS 2885.2-2002; Standard for Pipelines—Gas and Liquid Petroleum. American Weldin Society: Doral, FL, USA, 2002.
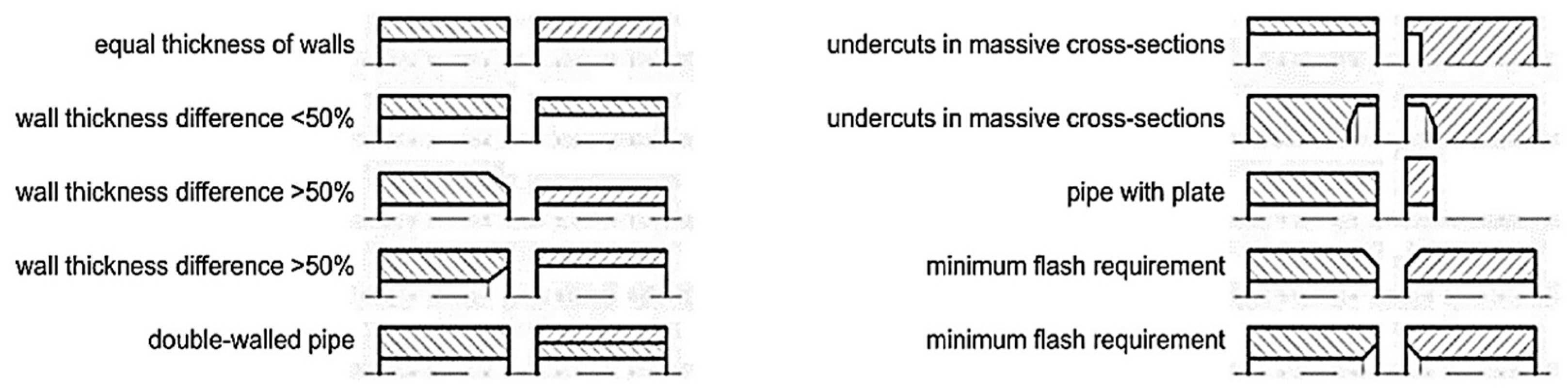
- Piwowarczyk, T.; Korzeniowski, M.; Ambroziak, A.; Kowal, T.; Rutka, R.; Karolewski, M. Effect of Pipe Face Preparation on the Quality of Magnetically Impelled Arc Welded Joints. eBIS 2016. [Google Scholar] [CrossRef]
- Ku, J.-M.; Kim, J.-W. Numerical Analysis of Magnetic Flux Density Distribution by an Openable Magnetic Flux Generator for MlAB Welding. J. KWJS 2004, 22, 536–542. [Google Scholar]
- Iordachescu, M.; Iordachescu, D.; Planas, J.; Scutelnicu, E.; Ocaña, J.L. Material Flow and Hardening at Butt Cold Welding of Aluminium. J. Mater. Process. Technol. 2009, 209, 4255–4263. [Google Scholar] [CrossRef]
- Birsan, D.; Scutelnicu, E.; Visan, D. Behaviour Simulation of Aluminium Alloy 6082-T6 during Friction Stir Welding and Tungsten Inert Gas Welding. In Proceedings of the International Conference on Manufacturing Engineering, Quality and Production Systems, Barcelona, Spain, 15–17 September 2011. [Google Scholar]
- Sivasankari, R.; Balusamy, V.; Buvanashekaran, G. Effect of Upset Current in Magnetically Impelled Arc Butt (MIAB) Welding of Carbon Steel Tubes. AMM 2014, 592–594, 240–244. [Google Scholar] [CrossRef]
- Dhivyasri, G.; Rahul, S.G.; Kavitha, P.; Arungalai Vendan, S.; Ramesh Kumar, K.A.; Gao, L.; Garg, A. Dynamic Control of Welding Current and Welding Time to Investigate Ultimate Tensile Strength of Miab Welded T11 Tubes. JMP 2018, 32, 564–581. [Google Scholar] [CrossRef]
- Sedighi, M.; MosayebNezhad, J. The Influence of Process Parameters on the Distribution of Residual Stresses in Magnetically Impelled Arc Welded Joints. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2019, 233, 3936–3949. [Google Scholar] [CrossRef]
- Vendan, S.A.; Manoharan, S.; Nagamani, C. MIAB Welding of Alloy Steel Tubes in Pressure Parts: Metallurgical Characterization and Non Destructive Testing. JMP 2012, 14, 82–88. [Google Scholar] [CrossRef]
- Sivasankari, R.; Balusamy, V.; Venkateswaran, P.R.; Buvanashekaran, G.; Ganesh Kumar, K. Characterization of Magnetically Impelled Arc Butt Welded T11 Tubes for High Pressure Applications. Def. Technol. 2015, 11, 244–254. [Google Scholar] [CrossRef]
- Arungalai Vendan, S.; Manoharan, S.; Buvanashekaran, G.; Nagamani, C. Strength Assessment Using Destructive Testing on MIAB Welded Alloy Steel Tubes and Subsequent Techno-Economical Evaluation. JMP 2012, 14, 328–335. [Google Scholar] [CrossRef]
- Iordachescu, D.; Georgescu, B.; Iordachescu, M.; Lopez, R.; Miranda, R.M.; García-Beltrán, A. Characteristics of Miab Welding Process and Joints. Weld World 2011, 55, 25–31. [Google Scholar] [CrossRef]
- Krishnan, T.M.; Balamurugan, C.; Dinaharan, I.; Palanivel, R. Influence of Arc Duration on Microstructure and Tensile Behavior of Magnetically Impelled Arc Butt Welded AISI 409 Ferritic Stainless Steel Tubes. Mater. Sci. Eng. A 2022, 831, 142257. [Google Scholar] [CrossRef]
- Dinaharan, I.; Muthu Krishnan, T.; Palanivel, R. An Assessment of Microstructure and Tensile Behavior of Magnetically Impelled Arc Butt Welded AISI 409 Ferritic Stainless Steel Tubes. J. Mater. Eng. Perform. 2022, 31, 7808–7819. [Google Scholar] [CrossRef]
- Krishnan, T.M.; Dinaharan, I.; Palanivel, R.; Balamurugan, C. Prediction of Tensile Strength and Assessing the Influence of Process Parameters of Magnetically Impelled Arc Butt Welded AISI 409 Ferritic Stainless Steel Tubes. Int. J. Adv. Manuf. Technol. 2022, 118, 417–432. [Google Scholar] [CrossRef]
- Kuchuk-Yatsenko, S.I.; Kachinsky, V.S.; Ignatenko, V.Y.; Goncharenko, E.I.; Koval, M.P. Magnetically-Impelled Arc Butt Welding of Automobile Parts. Paton Weld. J. 2010, 6, 28–31. [Google Scholar]
- Kustron, P.; Piwowarczyk, T.; Korzeniowski, M.; Sokołowski, P.; Bicz, A. The Detectability of Welding Defects in MIAB Welded Thin-Walled Tubular Components by Immersion Ultrasonic Technique. J. Nondestruct. Eval. 2020, 39, 42. [Google Scholar] [CrossRef]
- Ramesh Kumar, S.; SreeArravind, M. Assessment of Magnetically Impelled Arc Butt Welded Dissimilar Boiler Graded Steel Tubes: SAE213 T11 and SAE213 T. J. Mater. Eng Perform 2022, 31, 1846–1856. [Google Scholar] [CrossRef]
- Sivasankari, R.; Balusamy, V.; Buvanashekaran, G. Notch Tensile Properties of Magnetically Impelled Arc Butt (MIAB) Welded T11 Steel Tubes. Mater. Today Proc. 2022, 52, 655–660. [Google Scholar] [CrossRef]
- Peng, M.; Liu, H.; Xuan, Y.; Liu, X.; Xu, L.; Yu, Z. Evaluation of the Microstructural and Mechanical Properties of Ductile Cast Iron and Alloy Steel Dissimilar Materials Welded by Magnetically Impelled Arc Butt. J. Mater. Res. Technol. 2021, 15, 4623–4635. [Google Scholar] [CrossRef]
- Balta, B. Magnetic Impelled Arc Butt Welding Implementation on Truck Chassis Components. In Proceedings of the International Manufacturing Science and Engineering Conference, American Society of Mechanical Engineers. Detroit, MI, USA, 9 June 2014; p. V002T02A060. [Google Scholar]
- Balta, B.; Arıcı, A.A.; Yılmaz, M.; Gümüş, S.; Yücel, S.C. Microstructural and Mechanical Properties of Friction and MIAB Welded Carbon Steel Tubes and Forging Bracket Joints. Mater. Test. 2018, 60, 273–282. [Google Scholar] [CrossRef]
- Edson, D.A. Magnetically Impelled Arc Butt Welding of Thick Wall Tubes. IIW 1982, 726–782. [Google Scholar]
- Hone, P.N. Magnetically Impelled Arc Butt Welding. Prod. Eng. 1989, 38–40. [Google Scholar]
- Hagan, R. An Industrial Application of MIAB Welding of Tubes: A Rear Axle Cross Tube Assembly. In Proceedings of the Second International Conference on Pipe Welding, London, UK, 20 November 1979; Volume 1, pp. 51–58. [Google Scholar]
- Hiller, F.; Schmidt, M.; Breiksch, J. Use of the Magnetarc Welding Process in the Production of Truck Cab Suspension Systems. ThyssenKrupp. Techforum. 2003, 40–43. Available online: https://www.semanticscholar.org/paper/Use-of-the-Magnetarc-welding-process-in-the-of-cab-Hiller-Schmidt/e118b1107a51b882e9c14761a648e415e9b63d10 (accessed on 18 October 2023).
- Bschorr, T.; Jenicek, A.; Nentwig, A.W.E. Composite Structures Consisting of Steel and Nodular-Graphite Cast Iron Manufactured by Means of Magnetically Impelled Arc Butt Welding. Weld. Res. Abroad 1999, 11. Available online: https://www.researchgate.net/publication/295993387_Composite_structures_consisting_of_steel_and_nodular-graphite_cast_iron_manufactured_by_means_of_magnetically_impelled_arc_butt_welding (accessed on 18 October 2023).
- Faes, K.; Kachinskiy, V.S.; Silva, R.G.N.; Kuchuk-Yatsenko, S.I. Magnetically Impelled Arc Butt Welding of High-Strength Steel Tubular Parts of Hydraulic Cylinder. Weld. Mater. Test. 2020, 29, 13–18. [Google Scholar]
- Arungalai Vendan, S.; Mundla, S.; Buvanashekaran, G. Feasibility of Magnetically Impelled Arc Butt (MIAB) Welding of High-Thickness Tubes for Pressure Parts. Mater. Manuf. 2012, 27, 573–579. [Google Scholar] [CrossRef]
- AWS B4.0; Methods for Mechanical Testing of Welds, 8th Ed. American Weldin Society: Doral, FL, USA, 2021.
- Suresh Isravel, R.; Saravanan, S.; Venkateswaran, P.R. Exploration of Magnetically Impelled Arc Butt Welded SA210GrA Tubes for Boiler Applications. Mater. Today Proc. 2020, 21, 123–126. [Google Scholar] [CrossRef]
- Takagi, K.; Aracida, F. Magnetically Impelled Arc Faying Surfaces Welding of Gas Pipeline. Met. Constr. 1982, 20, 542–548. [Google Scholar]
- Jenicek, A.; Cramer, H. Bush Weld on Aluminium Materials–A Further Development for Joining of Small Hollow Bodies Using a Magnetically Impelled Arc. Weld. Cut. 2005, 4, 10–14. [Google Scholar]
- Hassel, T.; Maier, H.J.; Alkhimenko, A.; Davydov, A.; Shaposhnikov, N.; Turichin, G.; Klimova, O. Investigation of the Mechanical Properties and Corrosion Behaviour of Hybrid L 80 Type 1 and Duplex Steel Joints Produced by Magnetically Impelled Arc Butt Welding. J. Adv. Join. Process. 2022, 5, 100109. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | Parameters Considered in the Analysis | Simulation/ Optimization Tool/Test Method | Observations | Remarks | |
|---|---|---|---|---|---|
| Input | Output | ||||
| A213(T11) tubes [6] | welding current, welding voltage, magnetising current, magnetising voltage | arc speed, weld quality | MGGP framework implemented on GPTIPS | Linear variation of arc speed with arc voltage and welding current, parabolic variation with coil magnetising current. | Welding current is the most significant factor. |
| T91 Steel tubes 44.5 mm OD, 5.7 mm thickness [7] | upset current, welding time, tube thickness | tensile strength, microstructure | DT/NDT | Low thermal effect, high-speed arc rotation variation in HAZ. | Formation of voids caused by Cr percentage in steel. Low UTS at interface between weld and base material. |
| STK41: JIS G 3444 AA1050 JIS H4080 Cu Alloy C1220: JIS H 3300 60 mm OD, 3 mm thickness tubes [23] | exciting current, arc current, tube gap | arc rotation velocity, arc position, temperature | Maxwell for electromagnetic analysis | Arc rotation velocity varies with thickness and welding time. Temperature modifies with welding current and magnetic field. | High temperature reduces the yield strength of the material. The arc speed and its position are dependent on thickness. |
| ST37 tubes 25 mm OD, 3 mm thickness [10] | tube gap, magnetic field, arc current, welding time, upset force, upset rate | arc stability, tube deformation, microstructure, hardness, arc velocity | NDT, high-speed photography, optical sensor velocity measurement | Tube gap affects the arc stability; the upsetting force and its rate (dynamic effect) assure the weld quality. | Larger magnetic field with a new peripheral magnetic system. The molten metal flashes out, indicating some fusion weld characteristics. Arc velocity increases from zero, undergoes fluctuations, and then becomes quenched. |
| SA335, grade 11 pipes [26] | upset current, volumetric dilation, plasticity | residual stress, microstructure | ABAQUS, ANSYS | Welding current value modified: high for ignition, low for uniform heating, and high in the upset stage. Plasticity reduces the dilation effects. Welding time increases the residual stresses. Pressure decreases the axial stresses. | Phase transformations determine the circumferential residual stress. |
| Mild steel pipes 48.1 mm OD, 2.0 mm thickness [34] | exciting current, gap centre to coil distance, gap length | magnetic flux density | FEM—ANSYS 2D | Magnetic field depends on the exciting current and is inversely proportional to gap length and gap centre to coil distance. | Flux density drops inside the pipe rapidly, and the relative permeability has a small effect on the magnetic flux density distribution. |
| Carbon steel (SA210) tubes 44 mm OD, 4.5 mm thickness [44] | upset current | tensile strength | NDT | Formation of decarburised layer, when the upset current is low, may cause weld fracture. A high upset-current value determines the high-strength region. | Minimum upset current requirement is 800 A. |
| A213(T11) steel tubes 54 mm OD, 7 mm thickness [45] | welding current, welding time upset current | weld geometry, penetration depth, tensile strength | PI-PID Controller studied with Ziegler-Nichols tuning | Weld bead width is uniform. Depth of Penetration (DOP) UTS increases with the upset current. | The designed double controller reaches the set point faster than the conventional controller. Mechanical, electrical and control analysis determine good stability and reliability. |
| SA335, grade 11 tubes, 33 mm OD, 3 mm thickness [46] | welding time, upset pressure | mechanical and structural properties, residual stress | ANSYS | Positive influence on mechanical and structural properties. Negative influence on residual stress field. | Residual stresses cause solid phase transformations that reduce longitudinal stresses and volumetric phase change. |
| A213(T11) tubes, 47.6 mm OD, 6.6 mm thickness [47] | welding current, gap length, magnetic field | weld bead and penetration, arc behaviour | DT/NDT | Welding current, upset current and flux density determine the arc behaviour and weld features. | Optimal value of arc current = 200 A, upset current = 1100 A, upset time = 0.3 s. |
| A213(T11) tubes, 48 mm OD, 6 mm thickness [48] | welding current, welding time, upset current | tensile strength, ductility, microstructure | DT/NDT | Void formation caused by the low welding current, high upset current, and welding time. Welding current is the most significant factor for the weld quality. | Interaction effects of welding current and upset current significantly affect the microstructure and weld tensile strength. |
| A213(T11) tubes, 47.6 mm OD, 6.6 mm thickness [49] | welding current, welding time, upset current | DOP, reinforcement, weld bead, weld geometry | DT | The combined effect of welding current and welding time on DOP and weld bead. Low welding current, high welding time; and high arc current, low welding time are the combinations for the adequate heat input. | A minimum gap between tubes is required to avoid short circuits and arc extinction. |
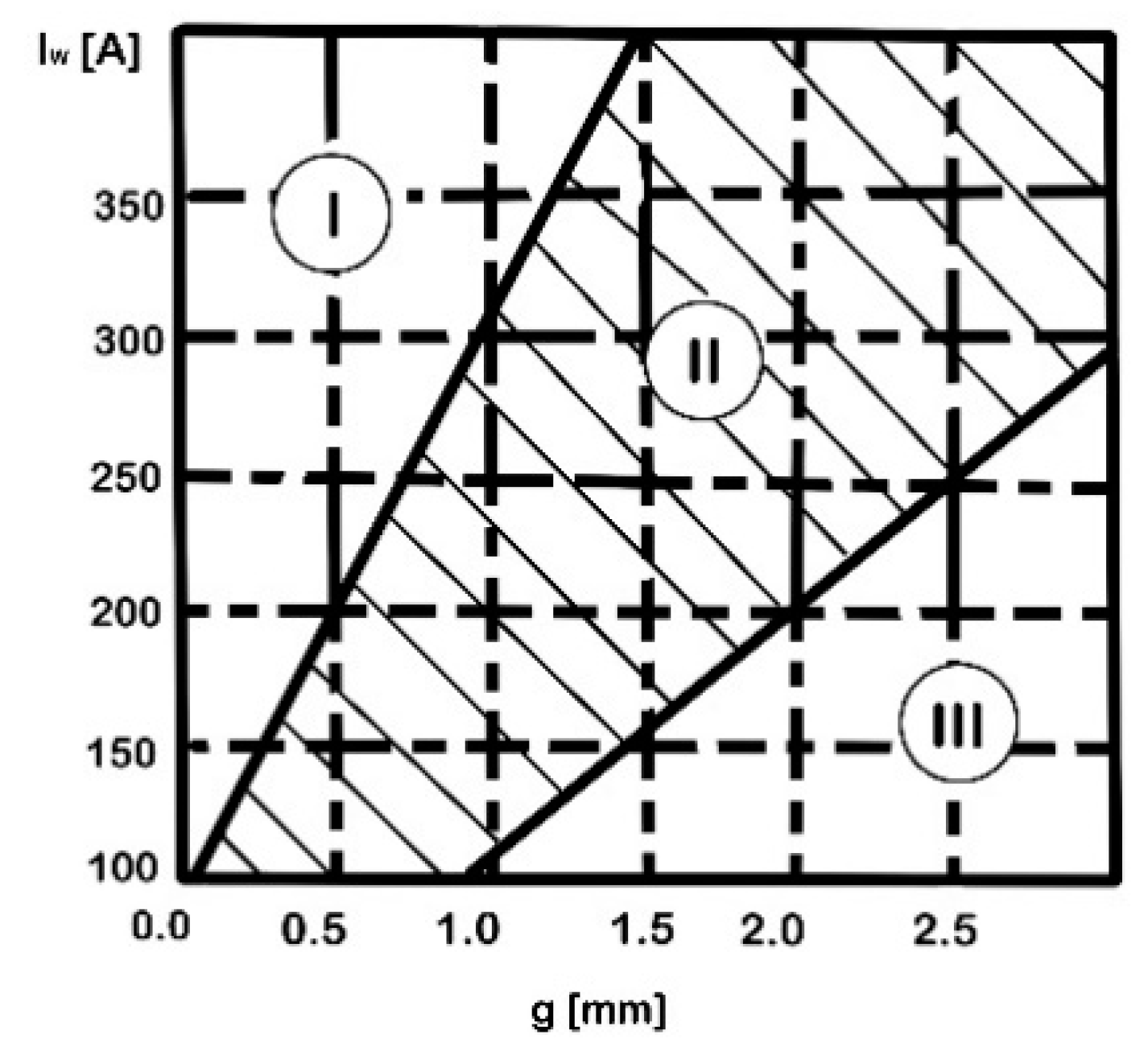
| ST37 low carbon steel tubes, 25.4 mm OD, 3 mm thickness [50] | gap length, distance between magnetisation shells, magnetisation current, deformation factor | magnetic field, welding process stability | IR imaging for temp study, NDT, DT | Stability depends on the welding current and gap value. Magnetic field (B) increases with the magnetisation current (Im). Maximum value B occurs at a gap of 0.5 mm, and B decreases for gaps >1.5 mm. | Peripheral solenoids magnetisation system, deformation factor >0.5 required for a good quality joint. |
| AISI 409 Ferritic SS Tubes, 4 mm Thickness [51] | arc time | weld zone dimension, tensile strength, hardness | microscopic analysis, tensile test | Larger weld zone and increased strength. Refined grain size in the weld region. Increased hardness in the weld region | Increased heat input with the arc duration causes forged structure in the weld zone with increased grain size and axial shortening. Upset stage causes formation of large strain field. |
| AISI 409 Ferritic SS Tubes, 4 mm Thickness [52] | arc current | weld zone dimension, tensile strength, hardness | microscopic analysis, tensile test | Increased current value resulting in larger grain size, followed by upset to determine grain refinement. No coarsening of grains was observed. No phase transformation in TMAZ. | Increased current enlarged the joint region and axial shortening. Optimum range of current required for proper upset. High-density dislocations cause joint strengthening. |
| AISI 409 Ferritic SS Tubes, 4 mm Thickness [53] | arc current, upset current, arc rotation time | weld zone dimension, tensile strength, hardness | macroscopic, microscopic analysis, tensile test | Fine-grained and deformed structure in the weld. TMAZ has significant strength in comparison with the base metal. | Parameter variation at 5 levels as per Central Composite Design of experiments. Oxide particles, improper forging and voids adversely affect the weld strength. |
| Material, Geometry Dimensions | Process Parameters | Characterisation |
|---|---|---|
| A213 (T11) tubes 47.6 mm OD, 6.6 mm thickness [3] |
|
|
| A213-T91 steel tubes, 44.5 mm OD, 5.7 mm thickness [7] |
|
|
| ST37 tubes, 25 mm OD, 3 mm thickness [10] |
|
|
| SG35 tubes, 76 mm OD, 16 mm thickness [11] |
| |
| X70 steel: steering rod, 22 mm OD, 2.2 mm thickness [54] |
|
|
| shock-absorber, 40 mm OD, 2.2 mm thickness [54] |
| |
| torque rod 34 mm OD 6.2 mm thickness [54] |
| |
| A213-T11, A213-T91 boiler pipes, heat exchangers [5] |
|
|
| SA210GrA tubes, 44 mm OD, 4.5 mm thickness [44] |
|
|
| A213-T11 tubes 47.6 mm OD, 6.6 mm thickness [45] |
|
|
| A213-T11 tubes, 47.6 mm OD, 6.6–7 mm thickness [49] |
|
|
| Low alloy steel (T11) tubes, 48 mm OD, 6 mm thickness [48] |
|
|
| ST 37 steel tubes 25.4 mm OD, 3 mm thickness [50] |
|
|
| TSA (tubular shaft assembly) parts: C22 steel tube, 1.5 mm thickness, and two ends: joint UC1 steel-stub shaft ended with spline [55] |
| |
| T11 and T91 Tubes OD- 44.5 mm, 4 mm thickness [56] |
|
|
| Element | Diameter (mm) | Wall Thickness (mm) | Welding Time (s) | Upsetting Force (kN) | Part Length (mm) | Length Reduction (mm) | Consumed Power (kW) |
|---|---|---|---|---|---|---|---|
| Steering rod | 22 | 2.2 | 3.7 | 21 | 300 | 2.1–2.3 | 6.1 |
| Shock absorber | 4 | 2.2 | 4.8 | 31 | 300 | 3.7–3.9 | 6.7 |
| Torque rod | 34 | 6.2 | 13.2 | 40 | - | 7.0–7.5 | 7.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaturvedi, M.; Vendan Subbiah, A.; Simion, G.; Rusu, C.C.; Scutelnicu, E. Critical Review on Magnetically Impelled Arc Butt Welding: Challenges, Perspectives and Industrial Applications. Materials 2023, 16, 7054. https://doi.org/10.3390/ma16217054
Chaturvedi M, Vendan Subbiah A, Simion G, Rusu CC, Scutelnicu E. Critical Review on Magnetically Impelled Arc Butt Welding: Challenges, Perspectives and Industrial Applications. Materials. 2023; 16(21):7054. https://doi.org/10.3390/ma16217054
Chicago/Turabian StyleChaturvedi, Mukti, Arungalai Vendan Subbiah, George Simion, Carmen Catalina Rusu, and Elena Scutelnicu. 2023. "Critical Review on Magnetically Impelled Arc Butt Welding: Challenges, Perspectives and Industrial Applications" Materials 16, no. 21: 7054. https://doi.org/10.3390/ma16217054
APA StyleChaturvedi, M., Vendan Subbiah, A., Simion, G., Rusu, C. C., & Scutelnicu, E. (2023). Critical Review on Magnetically Impelled Arc Butt Welding: Challenges, Perspectives and Industrial Applications. Materials, 16(21), 7054. https://doi.org/10.3390/ma16217054