
Composites Based on Cotton Microfibers Impregnated with Magnetic Liquid for Magneto-Tactile Sensors

Abstract
:1. Introduction
2. Materials and Methods
2.1. Fabrication of Magnetic Composites MC
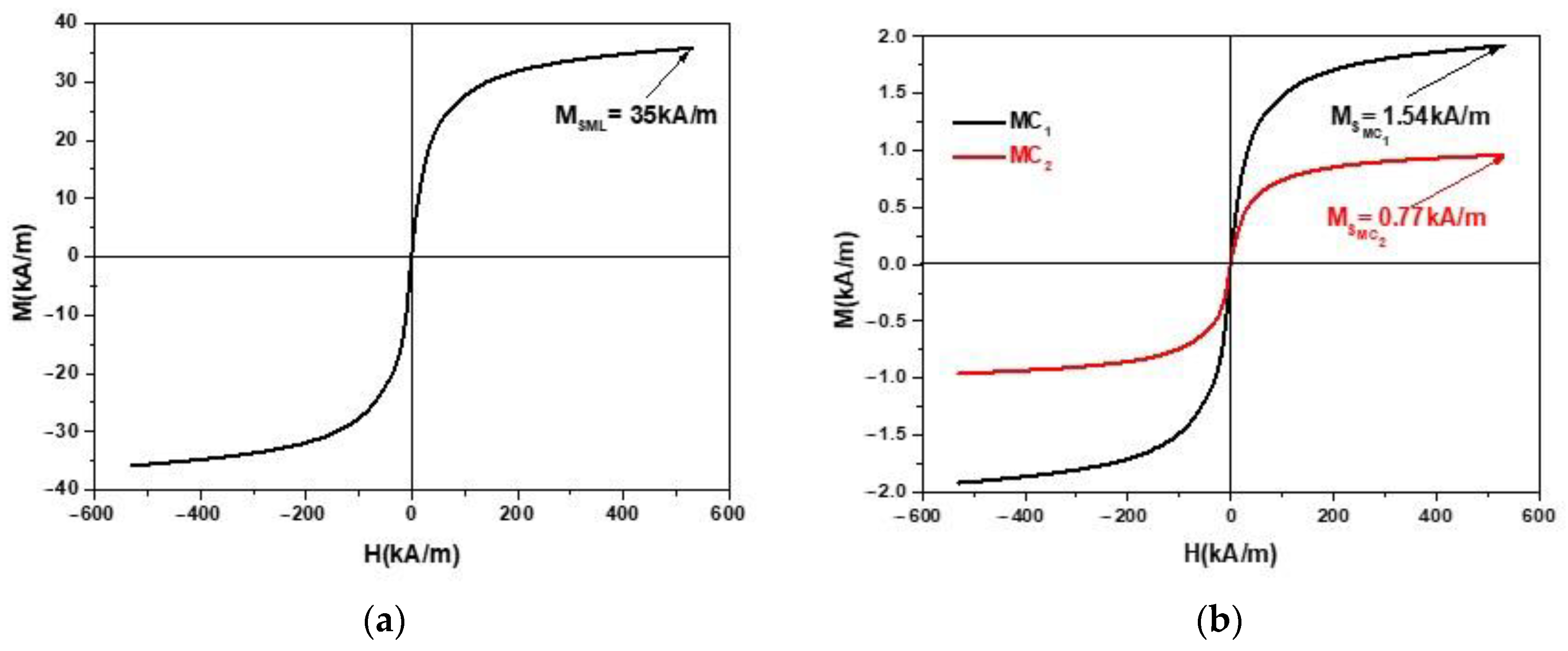
- Cotton fabric (GB), as shown in Figure 1. At room temperature and for a relative humidity of the air of 65%, GB has the density ρGB ≃ 1.033 g/cm3. The thickness of GB is 0.4 mm. ML (EFH-1 type) is produced by Ferrotec (Santa Clara, CA, USA) [42] and bought from Magneo Smart (Romania) [43]. The ML is based on a light mineral oil and magnetite nanoparticles (Fe3O4). At room temperature, the mass density of ML is ρML ≃ 1.21g/cm3 . The saturation magnetisation is about 35 kA/m, for magnetic field intensities H > 500 kA/m, as shown Figure 2a. The average diameter of the particles is dFe3O4 = 11.6 nm [44], and the volume fraction of Fe3O4, as reported in ref. [45], is ΦFe3O4 = 6.5 vol.%. The magnetization slope of ML recorded with an experimental set-up described in Ref. [46] is shown in Figure 2a.
2.2. Fabrication of the Electrical Devices EDs
- A simple textolite plate (PCu), coated with copper on one side, and with dimensions 100 × 75 × 0.8 mm3, from Electronic Light Tech (Bucuresti, Romania) [48]. The PCu is based on epoxy resin (FR4 type) reinforced with fiberglass. The thickness of the copper layer is 35 µm.
- Composites MC with dimensions 30 × 30 × 0.4 mm3.
- Patch on textile support (PTS), type Omniplast, bought from S. C. Hartmann S. R. L. (Bucuresti, Romania) [49]. The patch is a self-adhesive tape with a width of 5 cm, a thickness of 0.22 mm, and a length of 20 m.
- From the PCu are cut two identical pieces, each one with dimensions 30 × 30 × 0.8 mm3.
- On the copper-side of each plate, two copper conductors are attached by hot-welding.
- The PCu plates and MC composite are arranged as follows: a film of magnetic liquid is deposited on the copper side of the PCu plates; between the PCu plates, prepared in this way, the MC composite is deposited by pressing, so that there is no air layer between the solid plate and MC. We weighed the assemblies made in this way to keep the ratio between the amounts of magnetic liquid as in Table 1.
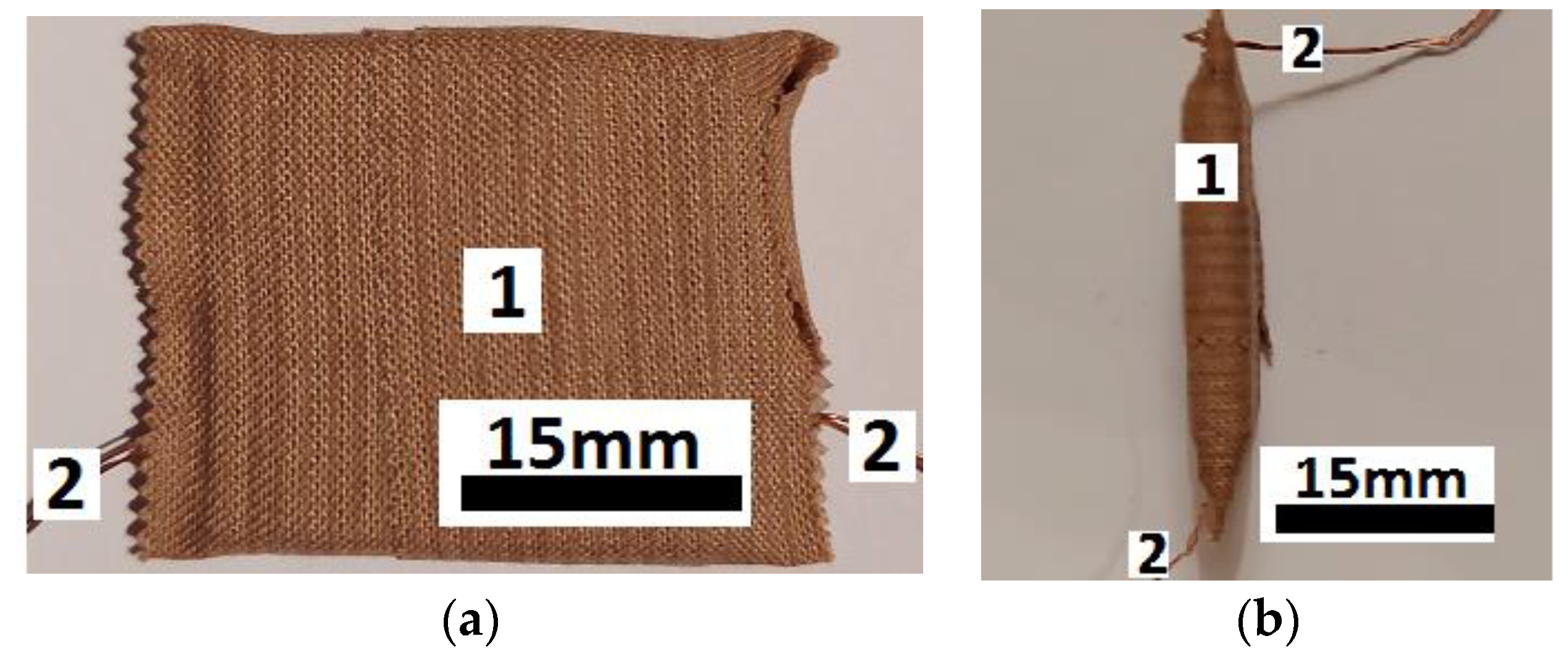
- From the PTS are cut two tapes of dimensions 10 × 5 mm2, which are then applied to the above-mentioned system. The whole system is then consolidated by pressing and sticking the PTS tapes. A minimum 1.5 mm thick layer is formed on each side of the ED device. As such, good electrical contact is achieved between the copper foil of PCu plates and the MC. One considers that the electrical contact is established when the electrical resistance of the terminals of ED, measured with the ohmmeter UT-60, is not infinite. At the end of this step, one obtains the electrical device as shown in Figure 4a,b. It has a unitary structure resistant to medium-intensity mechanical actions (falls, hits, etc.).
2.3. Experimental Set-Up and Measurements
3. Experimental Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dargahi, J.; Parameswaran, M.; Payandeh, S. A micromachined piezoelectric tactile sensor for an endoscopic grasper-theory, fabrication and experiments. J. Microelectromech. Syst. 2000, 9, 329–335. [Google Scholar] [CrossRef]
- Naidu, A.S.; Patel, R.V.; Naish, M.D. Low-cost disposable tactile sensors for palpation in minimally invasive surgery. IEEE/ASME Trans. Mechatron. 2016, 22, 127–137. [Google Scholar] [CrossRef]
- Wang, M.; Luo, Y.; Wang, T.; Wan, C.; Pan, L.; Pan, S.; He, K.; Neo, A.; Chen, X. Artificial skin perception. Adv. Mater. 2021, 33, 2003014. [Google Scholar] [CrossRef] [PubMed]
- Scaffaro, R.; Maio, A.; Citarrella, M.C. Ionic tactile sensors as promising biomaterials for artificial skin: Review of latest advances and future perspectives. Eur. Polym. J. 2021, 151, 110421. [Google Scholar] [CrossRef]
- Roberts, P.; Zadan, M.; Majidi, C. Soft tactile sensing skins for robotics. Curr. Robot. Rep. 2021, 2, 343–354. [Google Scholar] [CrossRef]
- Pyo, S.; Lee, J.; Bae, K.; Sim, S.; Kim, J. Recent progress in flexible tactile sensors for human-interactive systems: From sensors to advanced applications. Adv. Mater. 2021, 33, 2005902. [Google Scholar] [CrossRef]
- Gandarias, J.M.; Gómez-de-Gabriel, J.M.; García-Cerezo, A.J. Enhancing perception with tactile object recognition in adaptive grippers for human–robot interaction. Sensors 2018, 18, 692. [Google Scholar] [CrossRef] [PubMed]
- Kilaru, R.; Çelik-Butler, Z.; Butler, D.P.; Gönenli, I.E. NiCr MEMS tactile sensors embedded in polyimide toward smart skin. J. Microelectromech. Syst. 2012, 22, 349–355. [Google Scholar] [CrossRef]
- Pyo, S.; Lee, J.-I.; Kim, M.-O.; Chung, T.; Oh, Y.; Lim, S.-C.; Park, J.; Kim, J. Development of a flexible three-axis tactile sensor based on screen-printed carbon nanotube-polymer composite. J. Micromech. Microeng. 2014, 24, 075012. [Google Scholar] [CrossRef]
- Man, J.; Chen, G.; Chen, J. Recent Progress of Biomimetic Tactile Sensing Technology Based on Magnetic Sensors. Biosensors 2022, 12, 1054. [Google Scholar] [CrossRef]
- Sun, X.; Sun, J.; Li, T.; Zheng, S.; Wang, C.; Tan, W.; Zhang, J.; Liu, C.; Ma, T.; Qi, Z. Flexible tactile electronic skin sensor with 3D force detection based on porous CNTs/PDMS nanocomposites. Nano-Micro Lett. 2019, 11, 57. [Google Scholar] [CrossRef]
- Weichart, J.; Roman, C.; Hierold, C. Tactile Sensing With Scalable Capacitive Sensor Arrays on Flexible Substrates. J. Microelectromech. Syst. 2021, 30, 915–929. [Google Scholar] [CrossRef]
- Li, T.; Luo, H.; Qin, L.; Wang, X.; Xiong, Z.; Ding, H.; Gu, Y.; Liu, Z.; Zhang, T. Flexible capacitive tactile sensor based on micropatterned dielectric layer. Small 2016, 12, 5042–5048. [Google Scholar] [CrossRef] [PubMed]
- Wan, Y.; Qiu, Z.; Hong, Y.; Wang, Y.; Zhang, J.; Liu, Q.; Wu, Z.; Guo, C.F. A highly sensitive flexible capacitive tactile sensor with sparse and high-aspect-ratio microstructures. Adv. Electron. Mater. 2018, 4, 1700586. [Google Scholar] [CrossRef]
- Zhu, Y.; Chen, X.; Chu, K.; Wang, X.; Hu, Z.; Su, H. Carbon Black/PDMS Based Flexible Capacitive Tactile Sensor for MultiDirectional Force Sensing. Sensors 2022, 22, 628. [Google Scholar] [CrossRef]
- Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible piezoelectric tactile sensor array for dynamic three-axis force measurement. Sensors 2016, 16, 819. [Google Scholar] [CrossRef] [PubMed]
- Sappati, K.K.; Bhadra, S. Flexible piezoelectric 0–3 PZT-PDMS thin film for tactile sensing. IEEE Sens. J. 2020, 20, 4610–4617. [Google Scholar] [CrossRef]
- Kumaresan, Y.; Ma, S.; Shakthivel, D.; Dahiya, R. AlN Ultra-Thin Chips Based Flexible Piezoelectric Tactile Sensors. In Proceedings of the IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), Manchester, UK, 20–23 June 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Lin, W.; Wang, B.; Peng, G.; Shan, Y.; Hu, H.; Yang, Z. Skin-inspired piezoelectric tactile sensor array with crosstalk-free row+ column electrodes for spatiotemporally distinguishing diverse stimuli. Adv. Sci. 2021, 8, 2002817. [Google Scholar] [CrossRef]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef]
- Li, W.; Konstantinova, J.; Noh, Y.; Ma, Z.; Alomainy, A.; Althoefer, K. An elastomer-based flexible optical force and tactile sensor. In Proceedings of the 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, South Korea, 14–18 April 2019; pp. 361–366. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, Z.; Pan, J.; Wang, Y.; Zhang, L.; Tong, L. Finger-Skin-Inspired Flexible Optical Sensor for Force Sensing and Slip Detection in Robotic Grasping. Adv. Mater. Technol. 2021, 6, 2100285. [Google Scholar] [CrossRef]
- Hirohata, A.; Yamada, K.; Nakatani, Y.; Prejbeanu, I.-L.; Diény, B.; Pirro, P.; Hillebrands, B. Review on spintronics: Principles and device applications. J. Magn. Magn. Mater. 2020, 509, 166711. [Google Scholar] [CrossRef]
- Zheng, C.; Zhu, K.; De Freitas, S.C.; Chang, J.-Y.; Davies, J.E.; Eames, P.; Freitas, P.P.; Kazakova, O.; Kim, C.; Leung, C.-W. Magnetoresistive sensor development roadmap (non-recording applications). IEEE Trans. Magn. 2019, 55, 0800130. [Google Scholar] [CrossRef]
- Hackwood, S.; Beni, G.; Hornak, L.A.; Wolfe, R.; Nelson, T.J. A Torque-Sensitive Tactile Array for Robotics. Int. J. Robot. Res. 1983, 2, 46–50. [Google Scholar] [CrossRef]
- Luo, R.-C.; Wang, F.; Liu, Y.X. An imaging tactile sensor with magnetostrictive transduction. In Intelligent Robots and Computer Vision; SPIE: Philadelphia, PA, USA, 1985; Volume 521, pp. 264–270. [Google Scholar] [CrossRef]
- Nelson, T.; Jin, S.; Hackwood, S.; Beni, G. Shear-sensitive magnetoresistive robotic tactile sensor. IEEE Trans. Magn. 1986, 22, 394–396. [Google Scholar] [CrossRef]
- Clark, J.J. A magnetic field based compliance matching sensor for high resolution, high compliance tactile sensing. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 772–777. [Google Scholar] [CrossRef]
- Adl, P.; Memnon, Z.; Mapps, D.; Rakowski, R. Serpentine magnetoresistive elements for tactile sensor applications. IEEE Trans. Magn. 1990, 26, 2047–2049. [Google Scholar] [CrossRef]
- Chi, C.; Sun, X.; Xue, N.; Li, T.; Liu, C. Recent progress in technologies for tactile sensors. Sensors 2018, 18, 948. [Google Scholar] [CrossRef] [PubMed]
- Haghgoo, M.; Ansari, R.; Hassanzadeh-Aghdam, M.K. Prediction of electrical conductivity of carbon fiber-carbon nanotube- reinforced polymer hybrid composites. Compos. Part B Eng. 2019, 167, 728–735. [Google Scholar] [CrossRef]
- Kwon, Y.-J.; Park, J.-B.; Jeon, Y.-P.; Hong, J.-Y.; Park, H.-S.; Lee, J.-U. A Review of Polymer Composites Based on Carbon Fillers for Thermal Management Applications: Design, Preparation, and Properties. Polymers 2021, 13, 1312. [Google Scholar] [CrossRef]
- He, X.; Shi, J.; Hao, Y.; Wang, L.; Qin, X.; Yu, J. PEDOT:PSS/CNT composites based ultra-stretchable thermoelectrics and their application as strain sensors. Compos. Commun. 2021, 27, 100822. [Google Scholar] [CrossRef]
- Bica, I.; Iacobescu, G.-E. The Influence of Magnetic Fields on the Electrical Conductivity of Membranes based on Cotton Fabric, Honey, and Microparticles of Carbonyl Iron and Silver. Materials 2023, 16, 1995. [Google Scholar] [CrossRef]
- Bica, I.; Anitas, E.M.; Sfirloaga, P. Magnetizable Membranes Based on Cotton Microfibers, Honey, Carbonyl Iron, and Silver Nanoparticles: Effects of Static Magnetic Fields and Medium-Frequency Electric Fields on Electrical Properties. Magnetochemistry 2023, 292, 19. [Google Scholar] [CrossRef]
- Ferreira, A.S.; Macedo, C.; Silva, A.M.; Delerue-Matos, C.; Costa, P.; Rodrigues, F. Natural Products for the Prevention and Treatment of Oral Mucositis—A Review. Int. J. Mol. Sci. 2022, 23, 4385. [Google Scholar] [CrossRef] [PubMed]
- Khanjani Pour-Fard-Pachekenari, A.; Rahmani, A.; Ghahramanian, A.; Asghari Jafarabadi, M.; Onyeka, T.C.; Davoodi, A. The effect of an oral care protocol and honey mouthwash on mucositis in acute myeloid leukemia patients undergoing chemotherapy: A single-blind clinical trial. Clin. Oral Investig. 2019, 23, 1811–1821. [Google Scholar] [CrossRef] [PubMed]
- Burdușel, A.-C.; Gherasim, O.; Grumezescu, A.M.; Mogoantă, L.; Ficai, A.; Andronescu, E. Biomedical Applications of Silver Nanoparticles: An Up-To-Date Overview. Nanomaterials 2018, 8, 681. [Google Scholar] [CrossRef]
- Yin, I.X.; Zhang, J.; Zhao, I.S.; Mei, M.L.; Li, Q.; Chu, C.H. The Antibacterial Mechanism of Silver Nanoparticles and Its Application in Dentistry. Int. J. Nanomed. 2020, 15, 2555–2562. [Google Scholar] [CrossRef]
- Tofani, S. Magnetic fields and apoptosis: A possible mechanism. Electromagn. Biol. Med. 2022, 41, 293–303. [Google Scholar] [CrossRef] [PubMed]
- Bica, I.; Anitas, E.M. Electrical devices based on hybrid membranes with mechanically and magnetically controllable, resistive, capacitive and piezoelectric properties. Smart Mater. Struct. 2022, 31, 045001. [Google Scholar] [CrossRef]
- Ferrotec. Available online: www.ferrotec.com (accessed on 28 March 2023).
- Magneo Smart. Available online: https://magneo-smart.ro/ (accessed on 28 March 2023).
- Lee, W.-K.; Ilavsky, J. Particle size distribution in ferrofluid macro-clusters. J. Magn. Magn. Mater 2013, 330, 31–36. [Google Scholar] [CrossRef]
- Franklin, T.A. Ferrofluid Flow Phenomena. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, June 2003. [Google Scholar]
- Ercuta, A. Sensitive AC Hysteresigraph of Extended Driving Field Capability. IEEE Trans. Instrum. Meas. 2020, 69, 1643–1651. [Google Scholar] [CrossRef]
- Genc, S. Synthesis and Properties of Magnethoreological (MR) Fluids. Ph.D. Thesis, University of Pittsburgh, Pittsburgh, PA, USA, 2003. [Google Scholar]
- Electronic Light Tech. Available online: https://electroniclight.ro/ (accessed on 28 March 2023).
- S. C. Hartmann S. R. L. Available online: https://www.hartmann.info/ro-RO/ (accessed on 28 March 2023).
- Dexing Magnets Tech. Co. Available online: https://www.dexingmagnet.com/ (accessed on 28 March 2023).
- Bica, I.; Anitas, E.M. Graphene Platelets-Based Magnetoactive Materials with Tunable Magnetoelectric and Magnetodielectric Properties. Nanomaterials 2020, 10, 1783. [Google Scholar] [CrossRef]
- Odenbach, S.; Thurm, S. Magnetic fluids. In Magnetoviscous Effects in Ferrofluids; Lecture Notes in Physics; Springer: Berlin/Heidelberg, Germany, 2002; Volume 71. [Google Scholar] [CrossRef]
- Vasilyeva, M.; Nagornov, D.; Orlov, G. Research on Dynamic and Mechanical Properties of Magnetoactive Elastomers with High Permeability Magnetic Filling Agent at Complex Magneto-Temperature Exposure. Materials 2021, 14, 2376. [Google Scholar] [CrossRef] [PubMed]
- Bica, I.; Iacobescu, G.-E.; Chirigiu, L.-M.-E. Magneto-Tactile Sensor Based on a Commercial Polyurethane Sponge. Nanomaterials 2022, 12, 3231. [Google Scholar] [CrossRef] [PubMed]
- Iacobescu, G.-E.; Bica, I.; Chirigiu, L.-M.-E. Physical Mechanisms of Magnetic Field Effects on the Dielectric Function of Hybrid Magnetorheological Suspensions. Materials 2021, 14, 6498. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | mGB (g) | mML (g) | VGB (cm3) | VML (cm3) |
|---|---|---|---|---|
| MC1 | 0.360 | 0.138 | 0.348 | 0.114 |
| MC2 | 0.360 | 0.276 | 0.348 | 0.228 |
| Sample | Voil (cm3) | Vf (cm3) | VFe3O4 (cm3) | Φoil (vol.%) | Φf (vol.%) | ΦFe3O4 (vol.%) |
|---|---|---|---|---|---|---|
| MC1 | 0.10659 | 0.234 | 0.00741 | 30.6 | 67.2 | 2.2 |
| MC2 | 0.21318 | 0.120 | 0.01482 | 61.6 | 34.5 | 4.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bica, I.; Iacobescu, G.-E. Composites Based on Cotton Microfibers Impregnated with Magnetic Liquid for Magneto-Tactile Sensors. Materials 2023, 16, 3222. https://doi.org/10.3390/ma16083222
Bica I, Iacobescu G-E. Composites Based on Cotton Microfibers Impregnated with Magnetic Liquid for Magneto-Tactile Sensors. Materials. 2023; 16(8):3222. https://doi.org/10.3390/ma16083222
Chicago/Turabian StyleBica, Ioan, and Gabriela-Eugenia Iacobescu. 2023. "Composites Based on Cotton Microfibers Impregnated with Magnetic Liquid for Magneto-Tactile Sensors" Materials 16, no. 8: 3222. https://doi.org/10.3390/ma16083222