




Electro-Mechanical Coupling Analysis of L-Shaped Three-Dimensional Braided Piezoelectric Composites Vibration Energy Harvester


Abstract
:1. Introduction
2. The Model of L-Shaped 3D BPCEH
2.1. The Structural Model
2.2. Coupled Vibration Equations for the L-Shaped 3D BPCEH
2.2.1. Motion Governing Equation for the L-Shaped 3D BPCEH
- when x1 = 0:
- when x1 = L1 or x2 = 0:
- when x2 = L2:
2.2.2. Vibration Modal Analysis for the L-Shaped 3D BPCEH
2.2.3. Steady-State Response Analysis for the L-Shaped 3D BPCEH
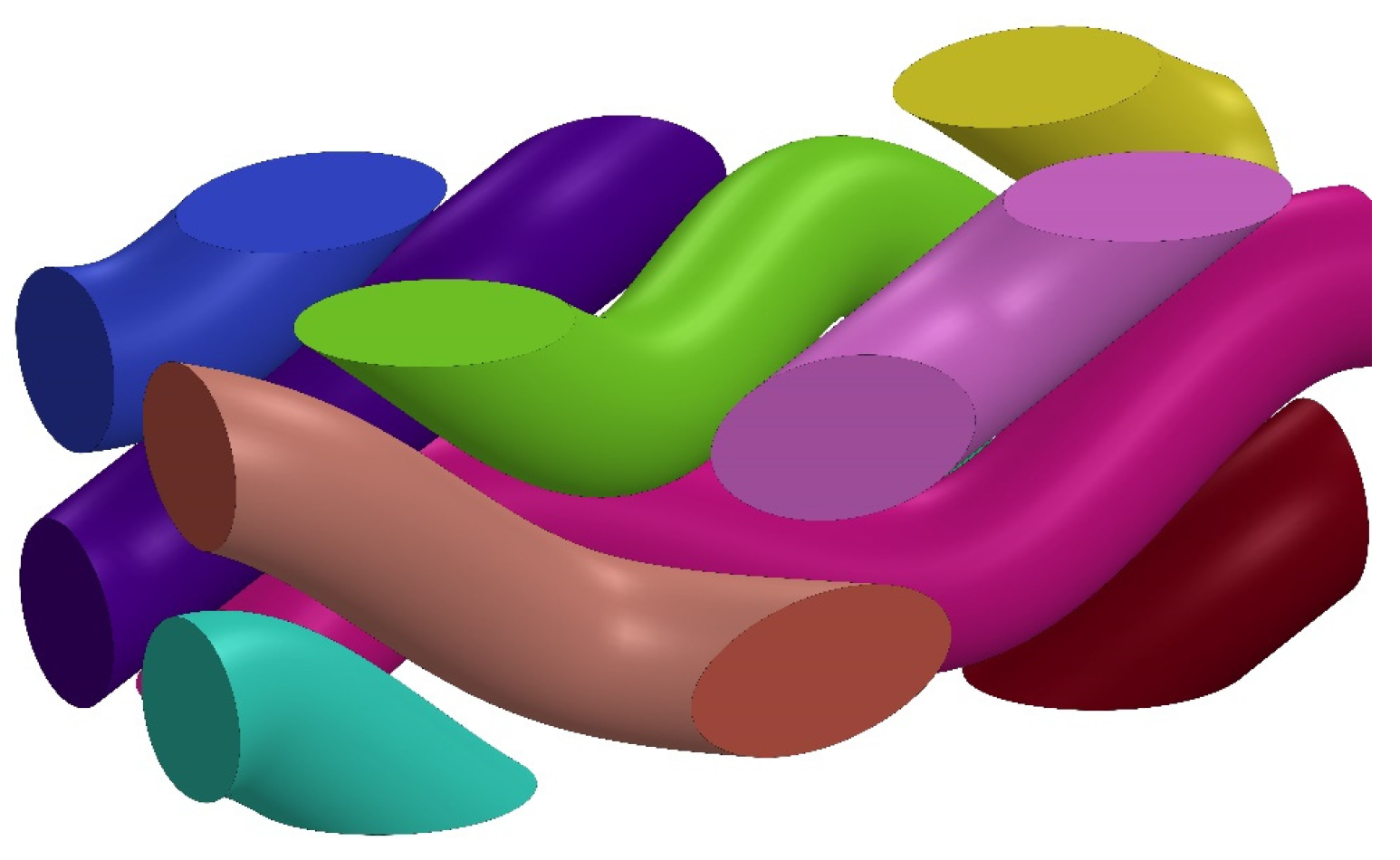
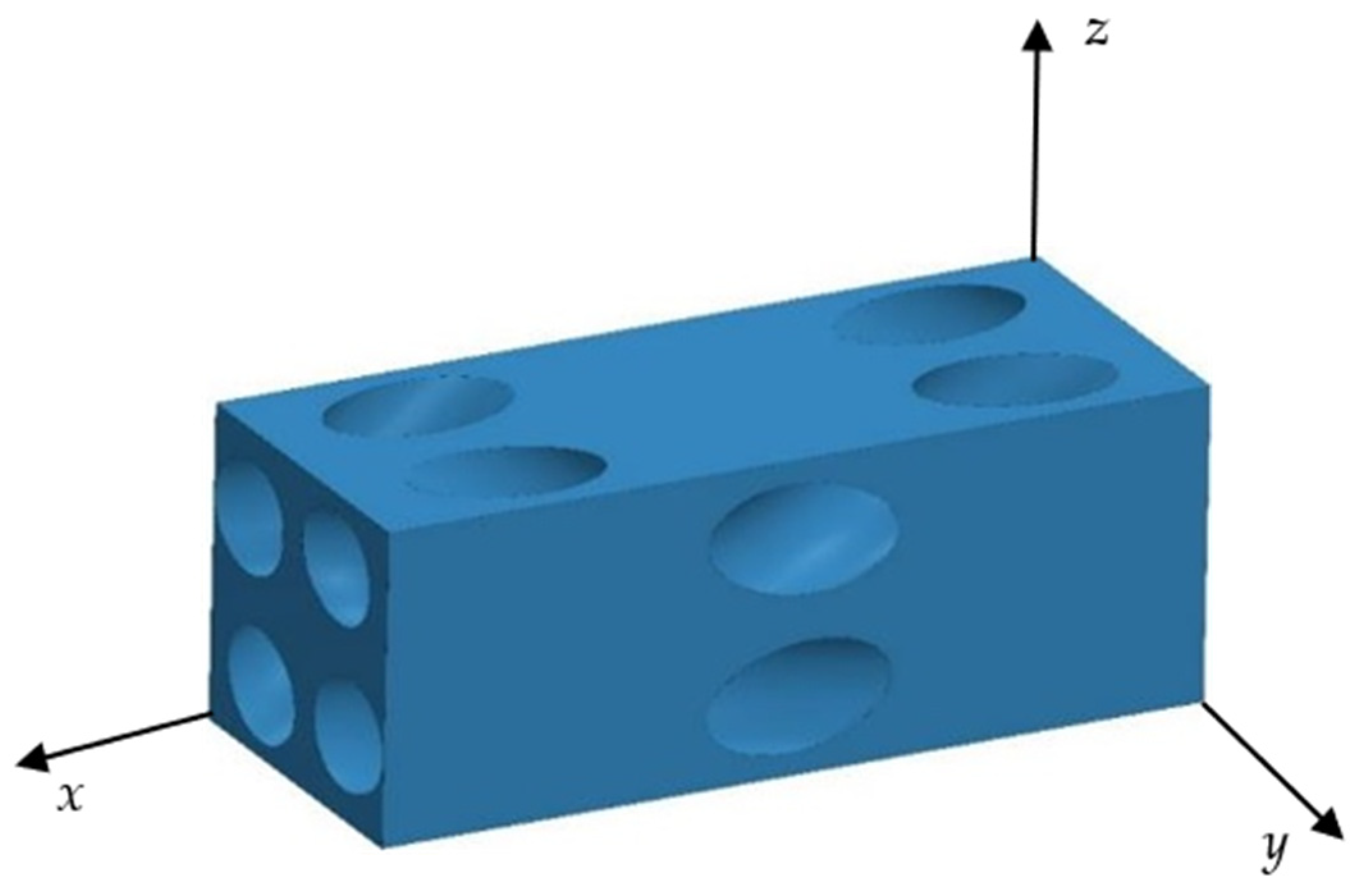
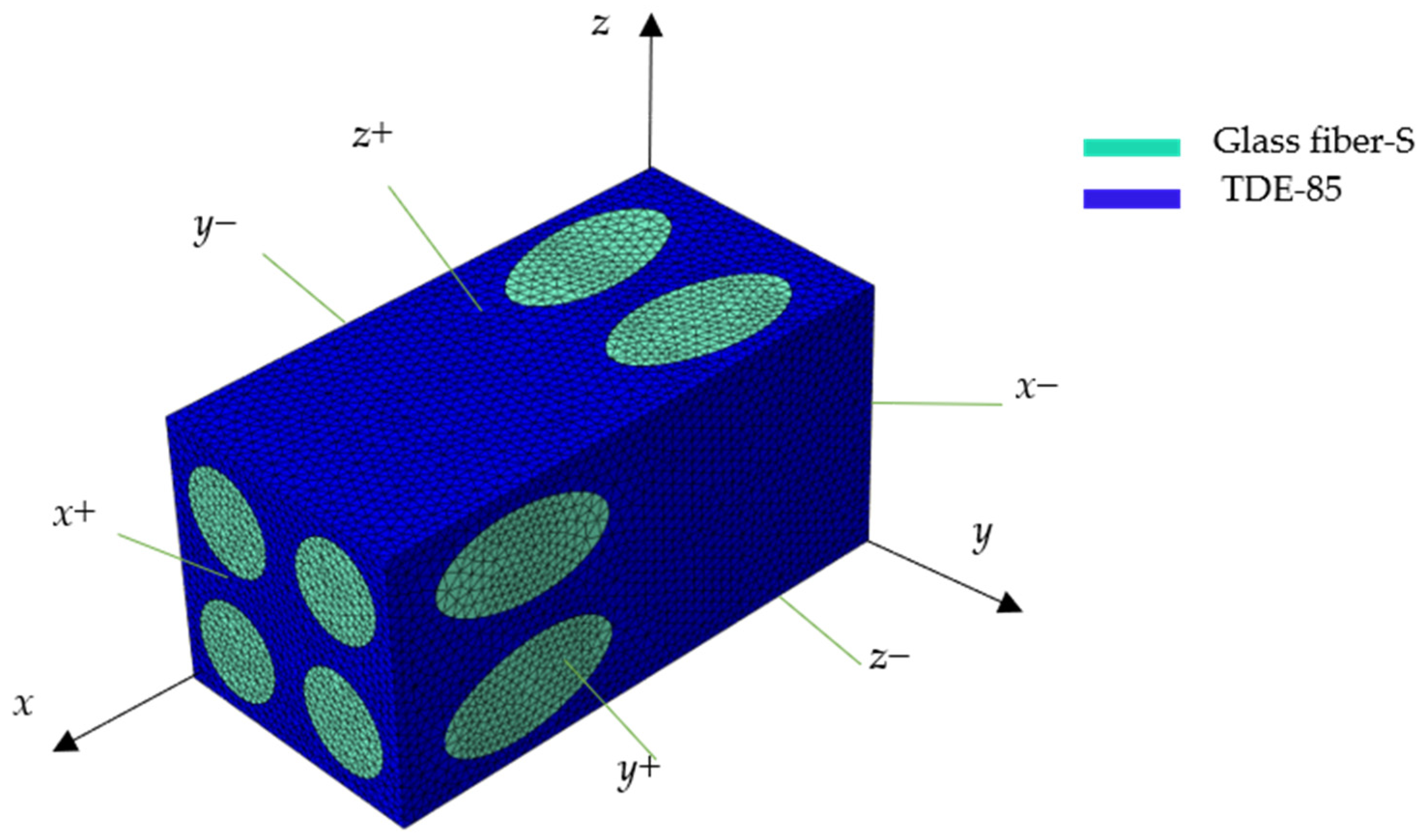
3. The Mechanical Characteristics of the 3D BPCEH Elastic Layer
4. Output Response Analysis of the L-Shaped 3D BPCEH
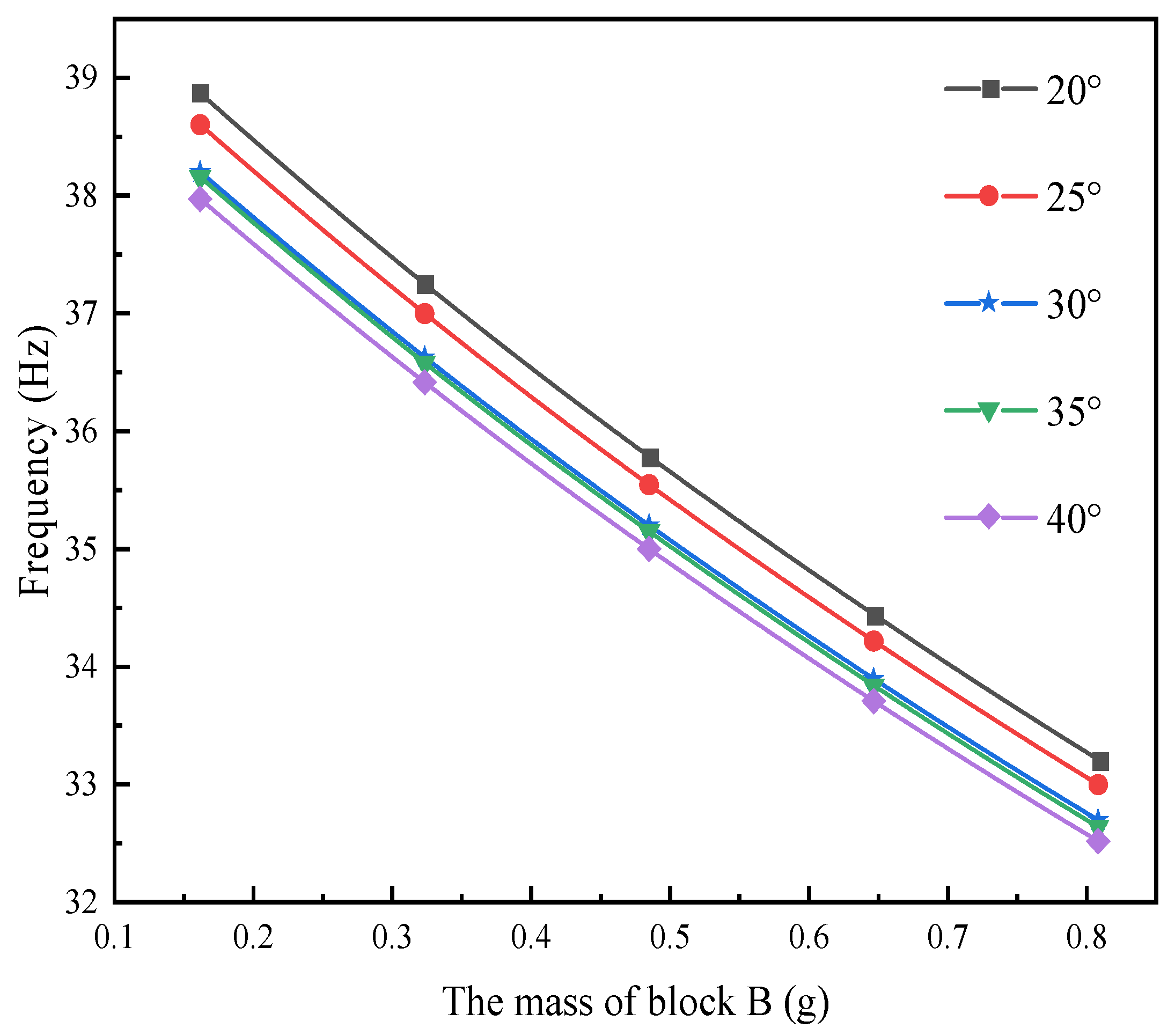
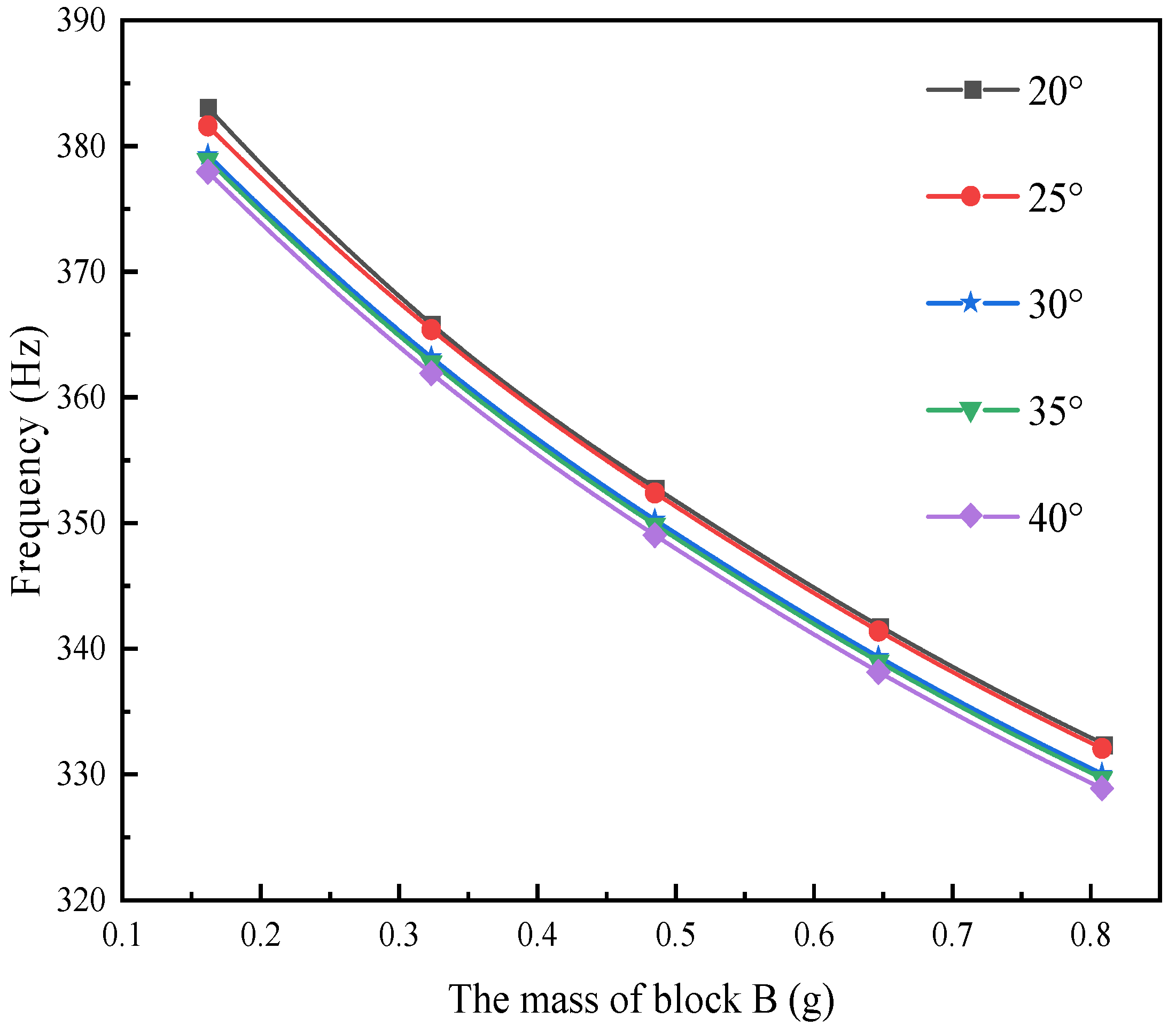
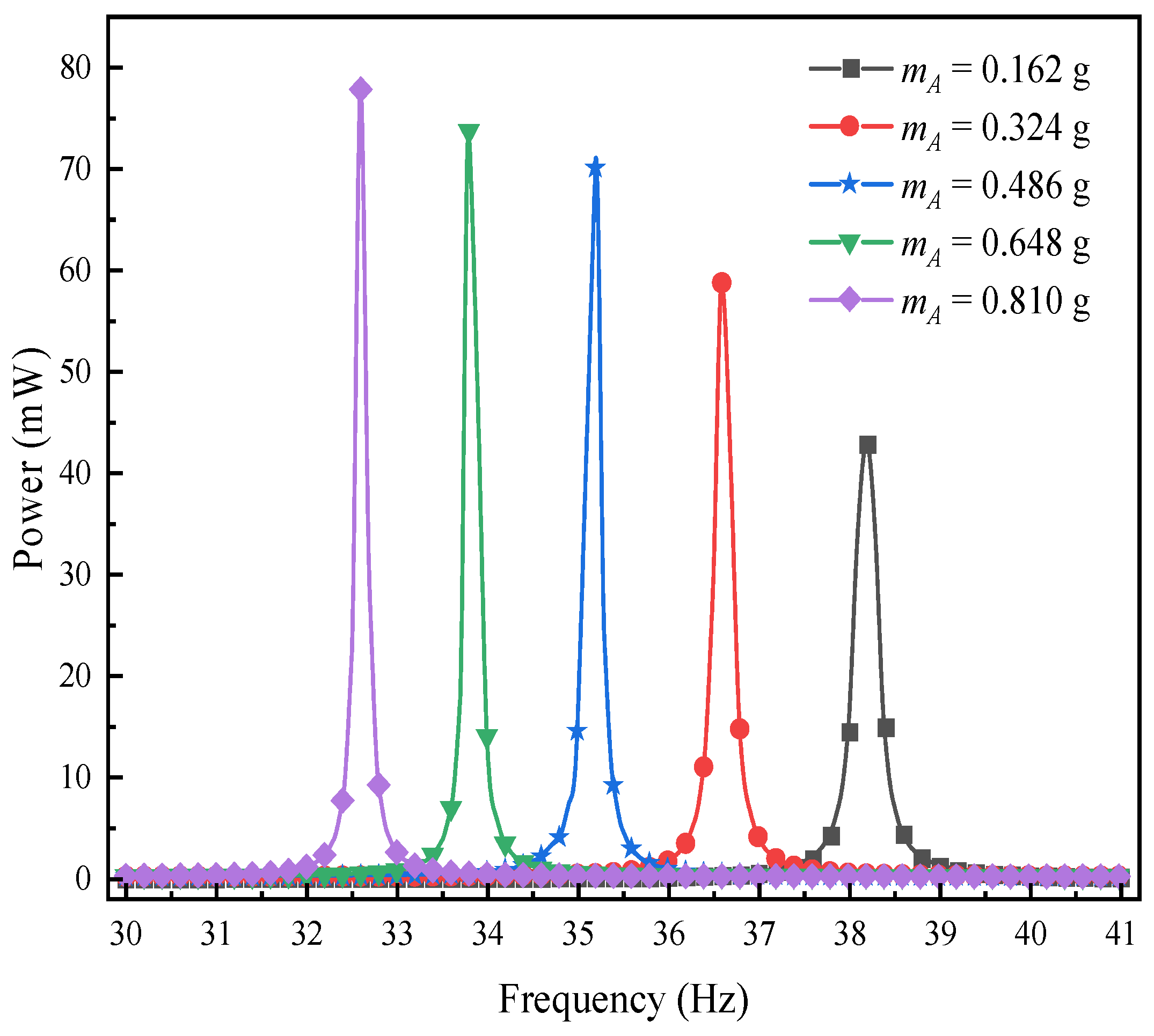
4.1. Effect of the Mass of Mass Block B on the Resonant Frequency of L-Shaped 3D BPCEH
4.2. Voltage-Frequency Domain Response Analysis of L-Shaped 3D BPCEH under Different Excitation Directions
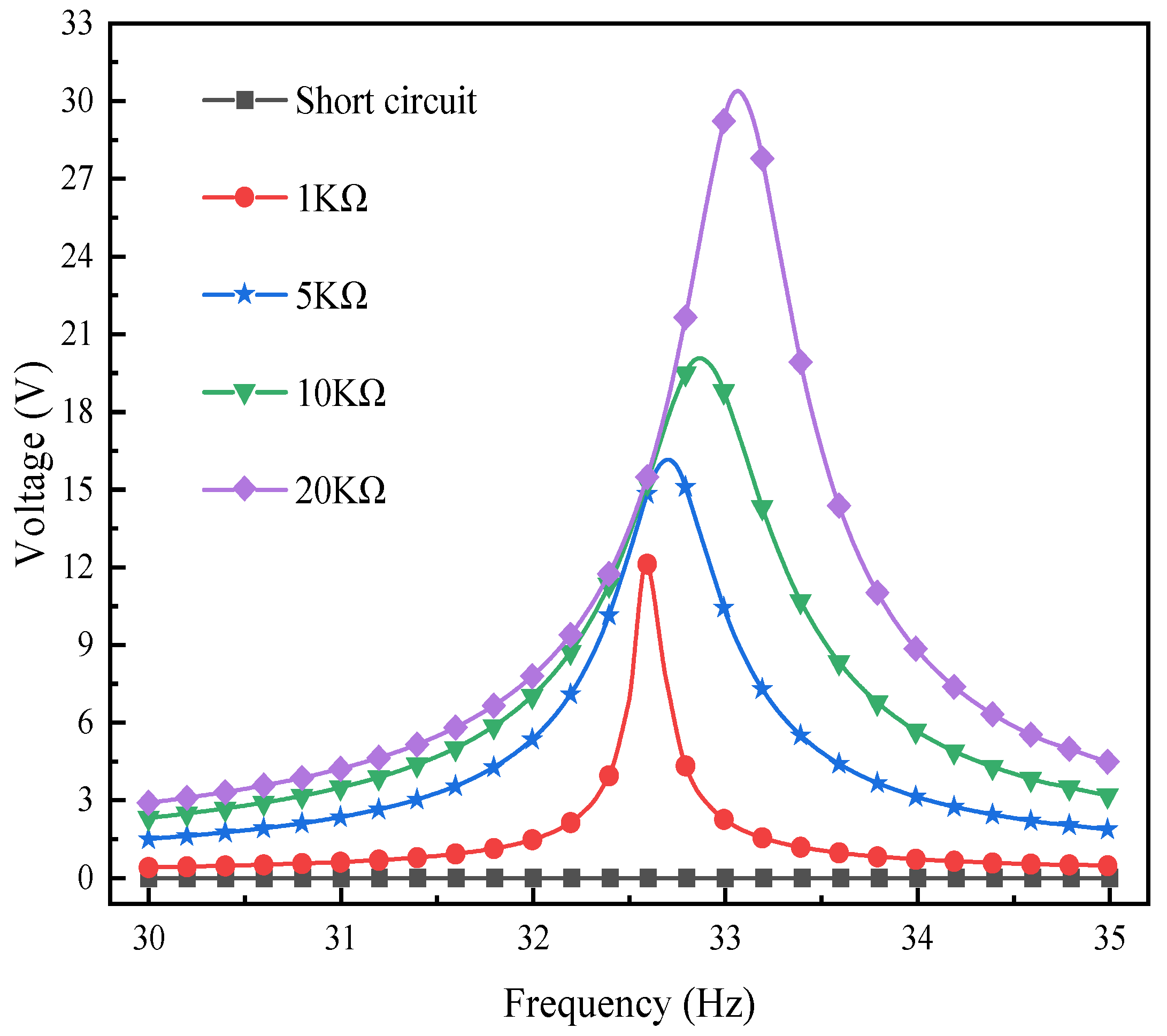
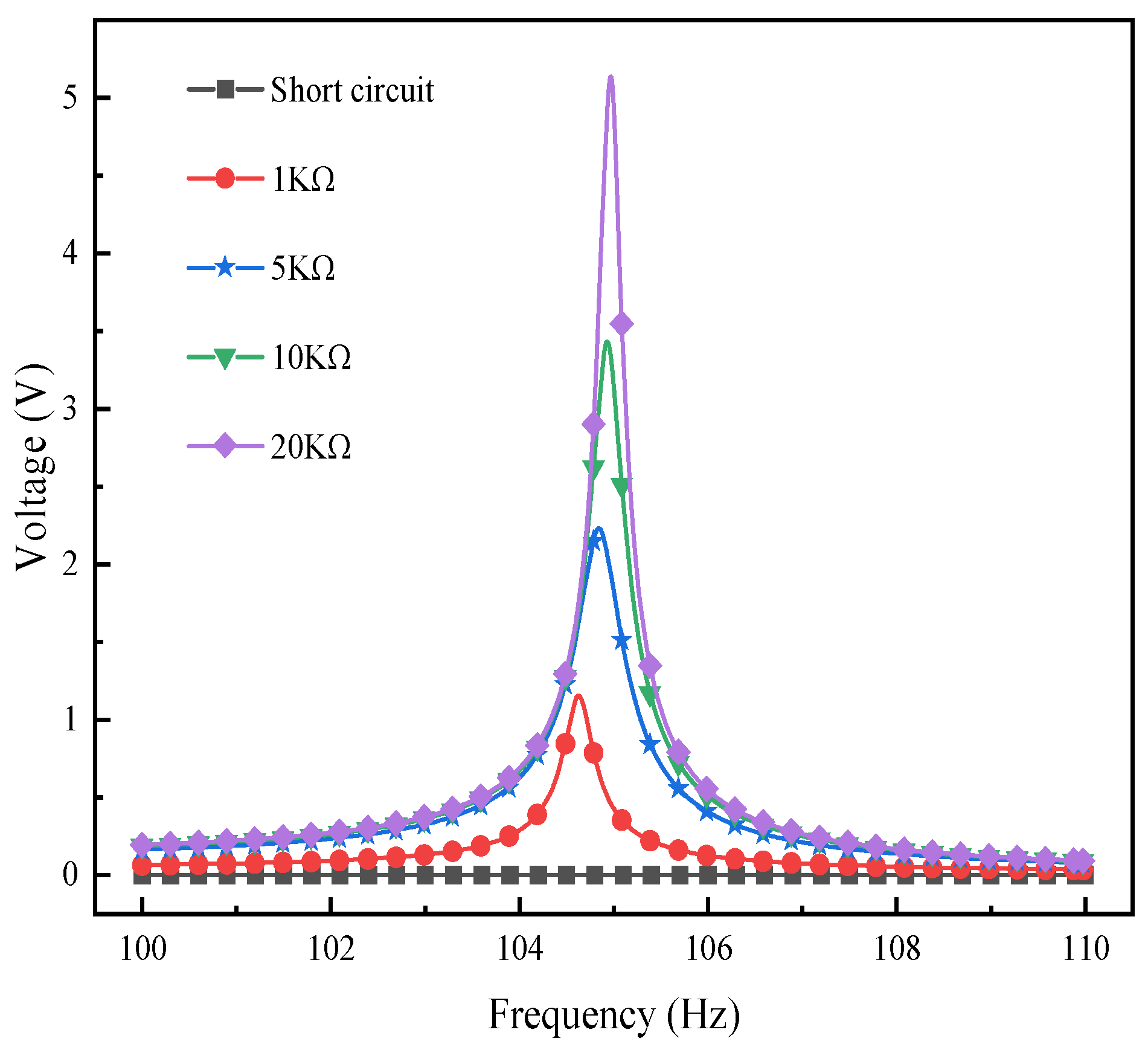
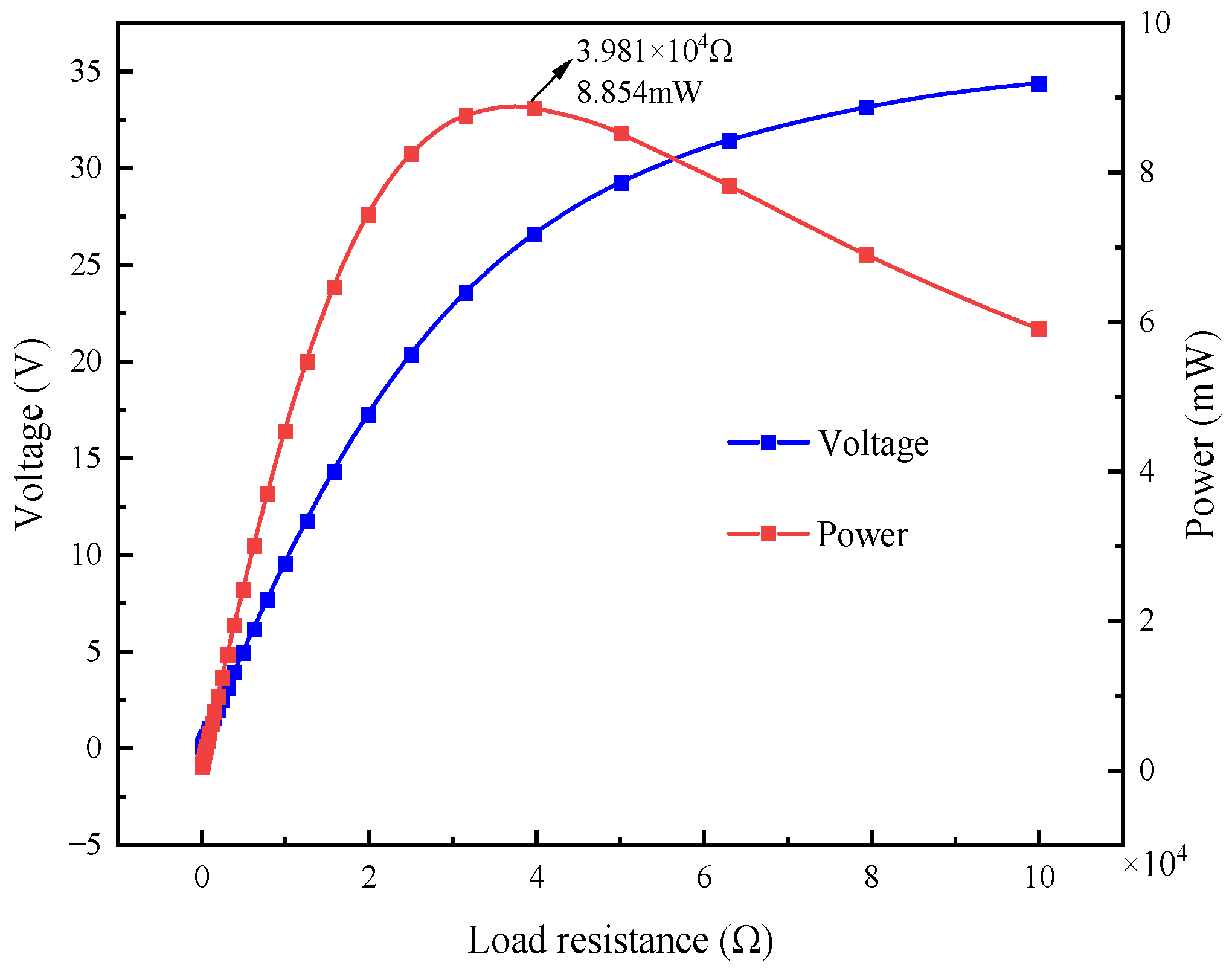
4.3. Effect of Load Resistance on the Output Response of L-Shaped 3D BPCEH
4.4. Effect of Excitation Acceleration on the Output Response of the L-Shaped 3D BPCEH
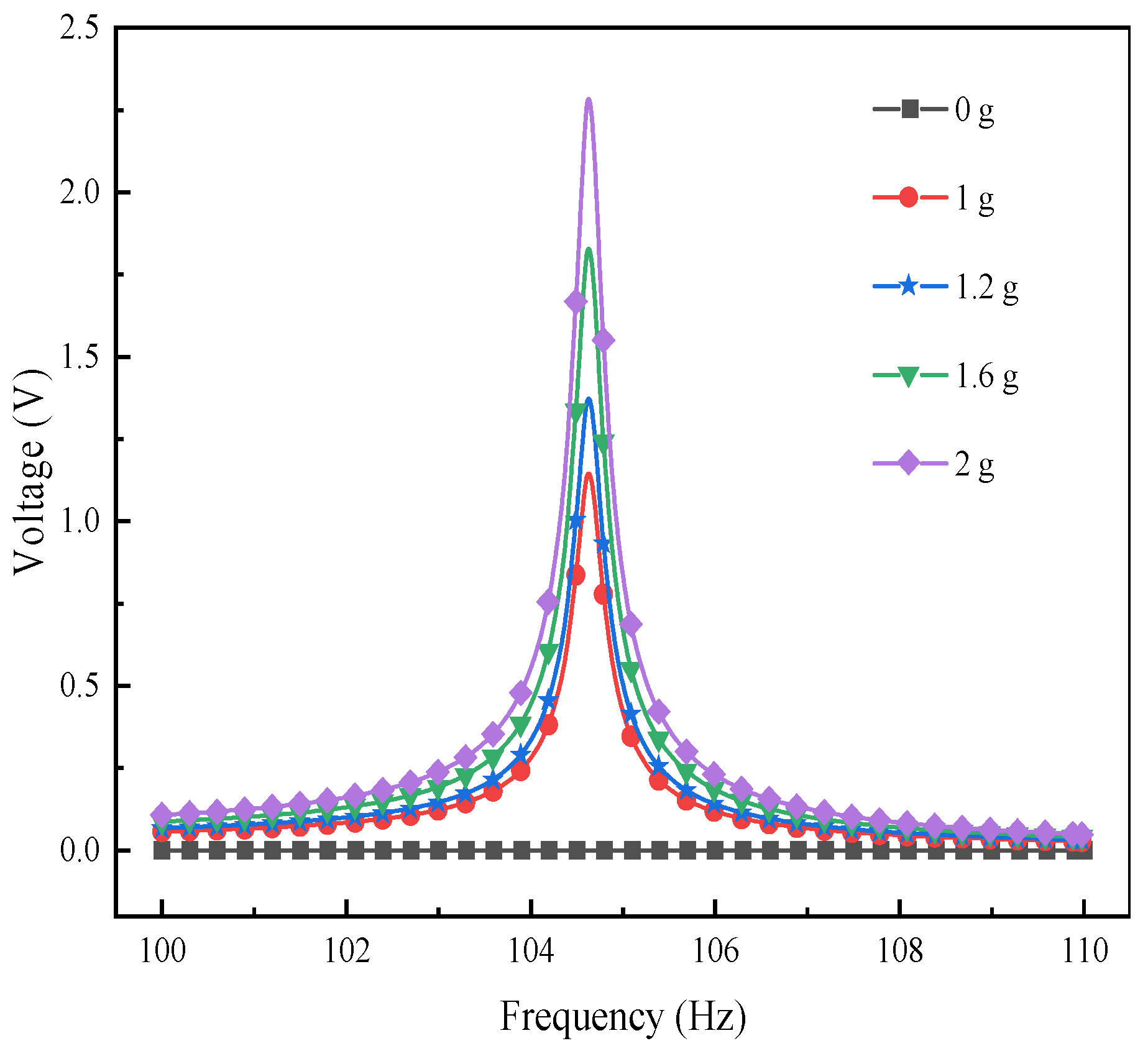
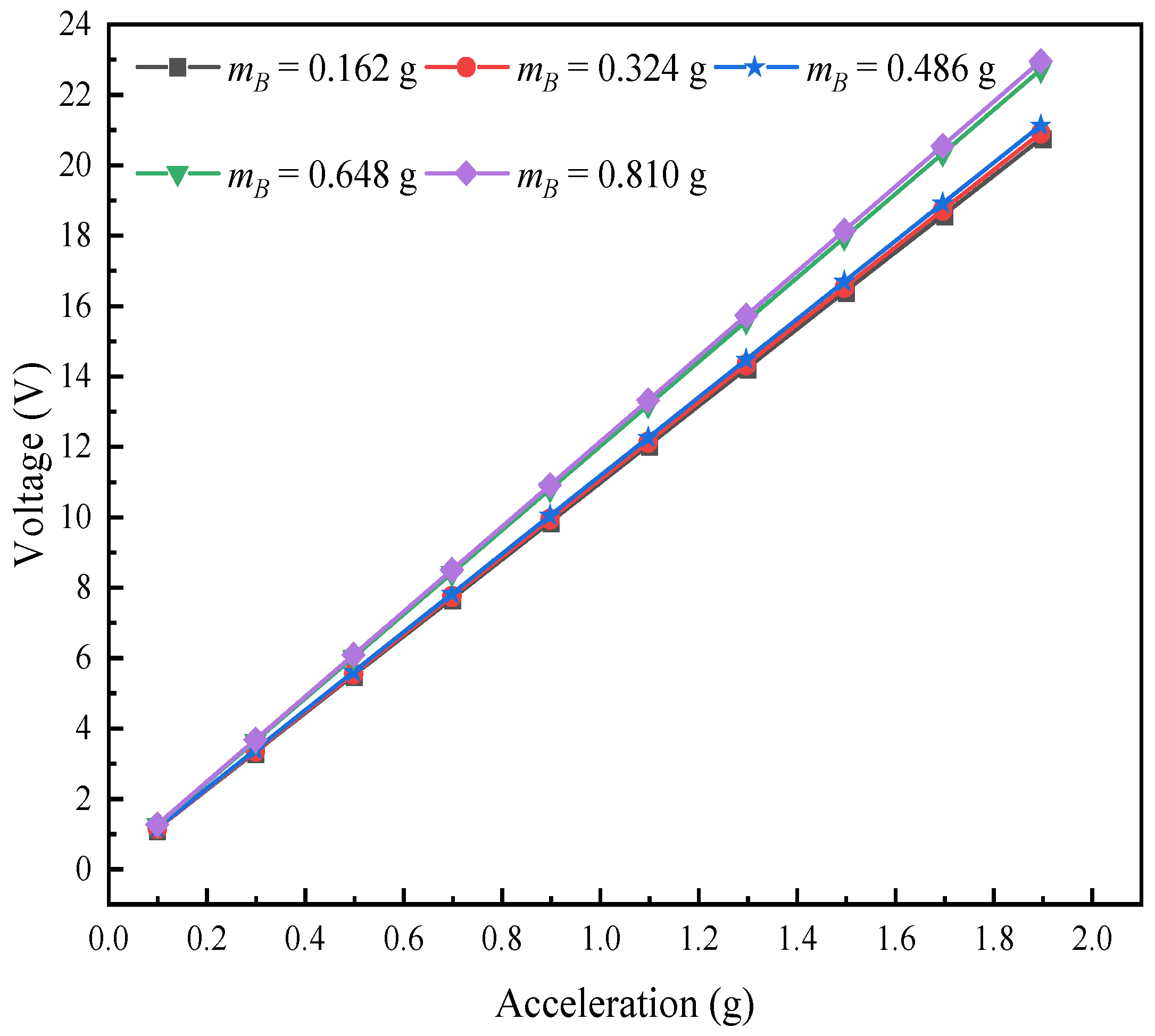
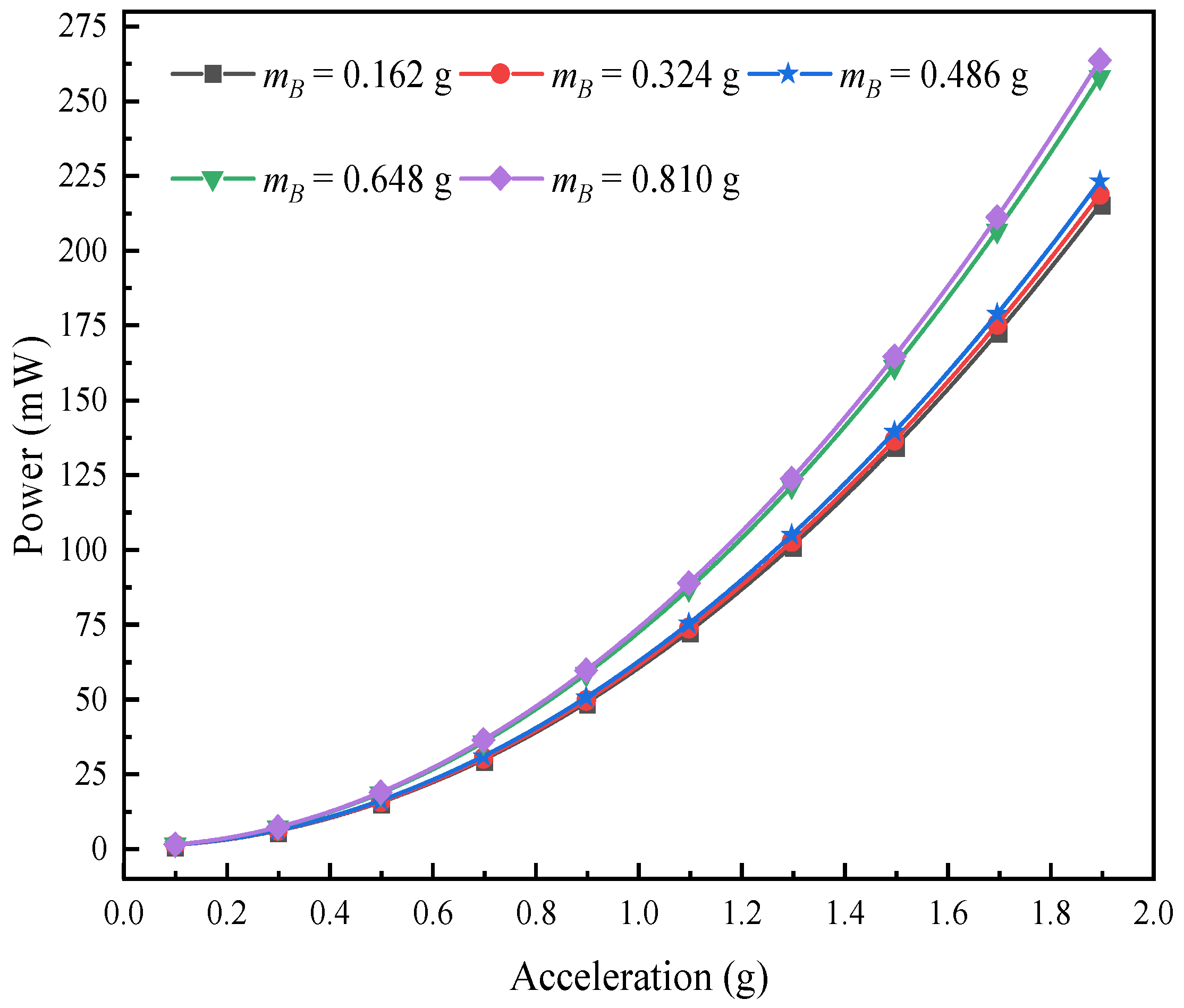
4.5. Effect of the Mass of Mass Block B on the Output Response of the L-Shaped 3D BPCEH
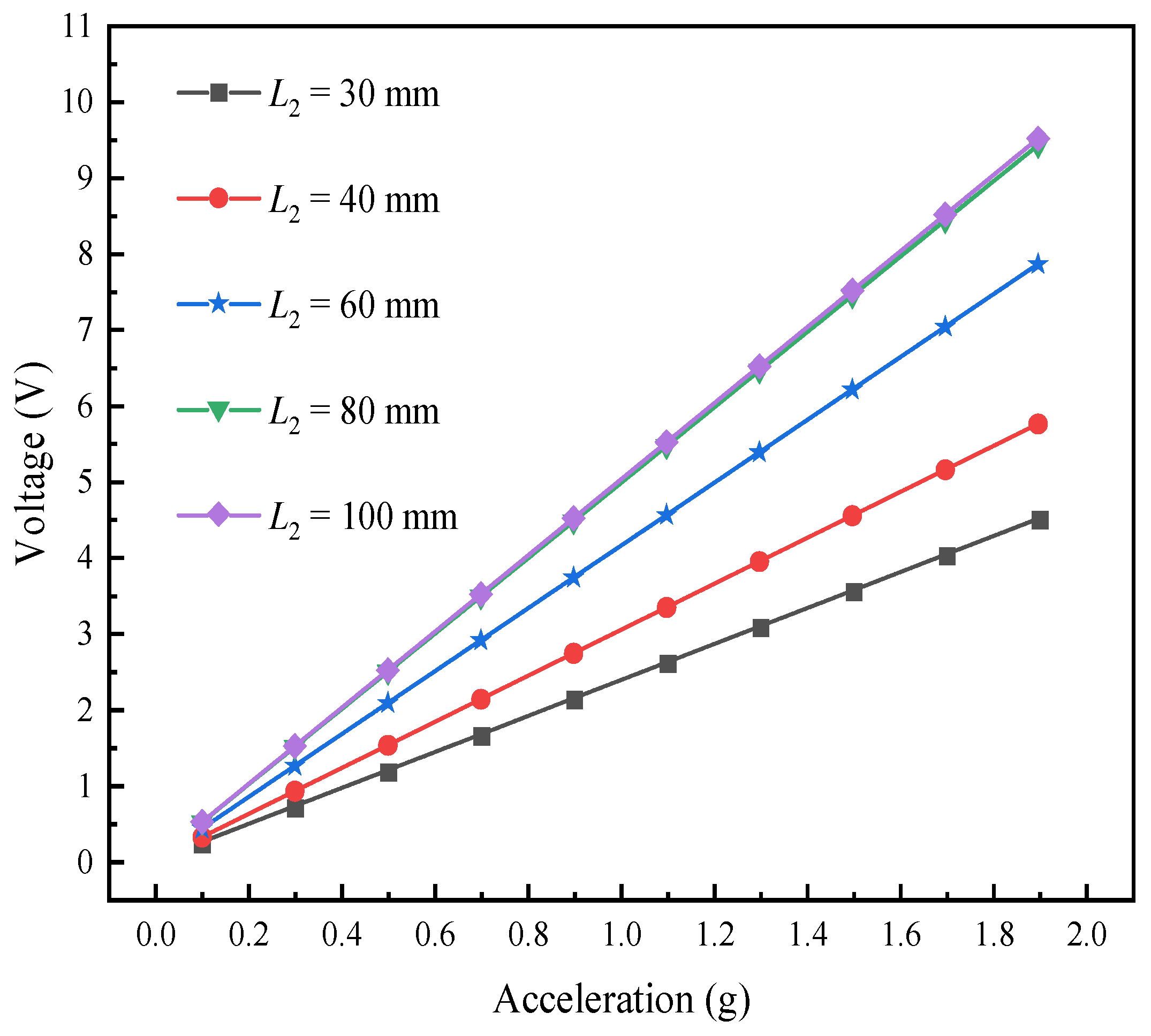
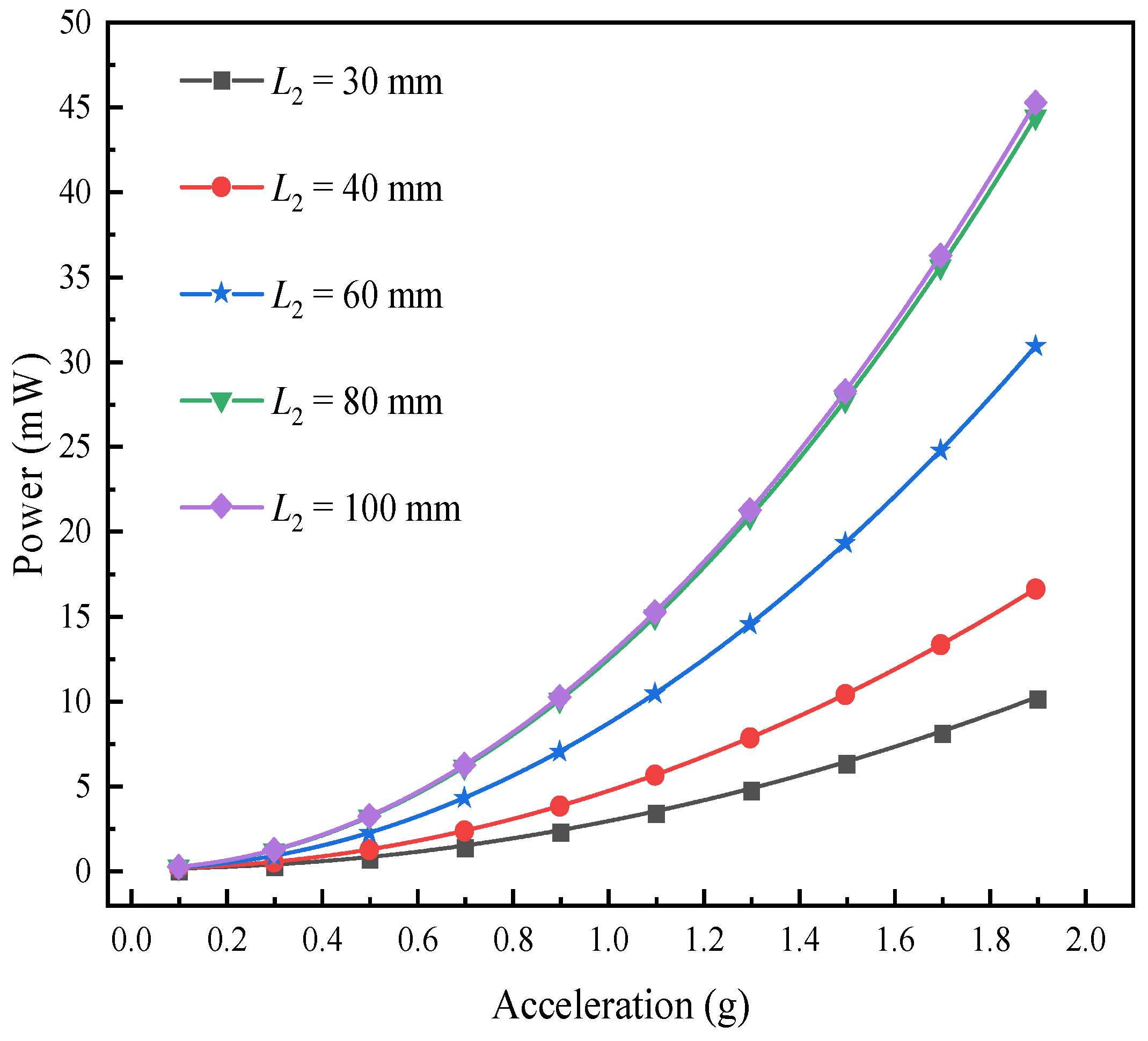
4.6. Effect of Beam Length on the Output Response of the L-Shaped 3D BPCEH
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, Y.; Hu, G.; Zhao, C.; Tang, B.; Mu, X.; Yang, Y. An L-shaped and bending-torsion coupled beam for self-adaptive vibration energy harvesting. J. Phys. D Appl. Phys. 2023, 56, 284001. [Google Scholar] [CrossRef]
- Ahmed, I.; Chowdhury, A. Design and Simulation of L-shaped Piezoelectric Energy Harvester for Pacemaker Application. In Proceedings of the 2023 6th International Conference on Electrical Information and Communication Technology (EICT), Khulna, Bangladesh, 7–9 December 2023; pp. 1–6. [Google Scholar]
- Saxena, S. Analysis and Simulation of Angle Effect of L-Shaped Beam Branches on the Performance of Multi-Resonant Piezoelectric Energy Harvester. In Proceedings of the 2023 9th International Conference on Signal Processing and Communication (ICSC), Noida, India, 21–23 December 2023; pp. 638–641. [Google Scholar]
- Li, H.; Liu, D.; Wang, J.; Shang, X. Energy harvesting using a torsional mode L-shaped unimorph structure: Modeling and experimental investigations. J. Vib. Acoust. 2020, 142, 011008. [Google Scholar] [CrossRef]
- Swallow, L.M.; Luo, J.K.; Siores, E.; Patel, I.; Dodds, D. A piezoelectric fibre composite based energy harvesting device for potential wearable applications. Smart Mater. Struct. 2008, 17, 025017. [Google Scholar] [CrossRef]
- Meng, L.; Li, A.; Wei, G. Electromechanical coupling analysis of three-dimensional BPCEH. Mech. Adv. Mater. Struc. 2022, 29, 6585–6594. [Google Scholar] [CrossRef]
- Manka, M.; Rosiek, M.; Martowicz, A.; Stepinski, T.; Uhl, T. Lamb wave transducers made of piezoelectric macro-fiber composite. Struct. Control. Health Monit. 2012, 20, 1138–1158. [Google Scholar] [CrossRef]
- Liu, D.; Al-Haik, M.; Zakaria, M.; Hajj, M. Piezoelectric energy harvesting using L-shaped structures. J. Intell. Mater. Syst. Struct. 2018, 29, 1206–1215. [Google Scholar] [CrossRef]
- Li, H.; Sun, H.; Song, B.; Zhang, D.; Shang, X.; Liu, D. Nonlinear dynamic response of an L-shaped beam-mass piezoelectric energy harvester. J. Sound Vib. 2021, 499, 116004. [Google Scholar] [CrossRef]
- Xie, X.; Wang, Z.; Liu, D.; Du, G.; Zhang, J. An experimental study on a novel cylinder harvester made of L-shaped piezoelectric coupled beams with a high efficiency. Energy 2020, 212, 118752. [Google Scholar] [CrossRef]
- Amin, M.; Almoneef, T.; Siddiqui, O.; Aldhaeebi, M.; Mouine, J. An interference-based quadruple-L cross metasurface absorber for RF energy harvesting. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 2043–2047. [Google Scholar] [CrossRef]
- Dharini, K.; Lakshmi, P.; Mangaiyarkarasi, P. Design and modeling of L-shape piezoelectric energy harvester for powering deep brain stimulation system. In Renewable Energy Optimization, Planning and Control: Proceedings of ICRTE 2021; Springer: Singapore, 2022; pp. 69–80. [Google Scholar]
- Kundu, S.; Nemade, H. Modeling and Simulation of a Piezoelectric Vibration Energy Harvester. Procedia Eng. 2016, 144, 568–575. [Google Scholar] [CrossRef]
- Tseng, V.F.-G.; Bedair, S.S.; Radice, J.J.; Drummond, T.E.; Lazarus, N. Ultrasonic Lamb waves for wireless power transfer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2019, 67, 664–670. [Google Scholar] [CrossRef]
- Erturk, A.; Renno, J.; Inman, D. Modeling of piezoelectric energy harvesting from an L-shaped beam-mass structure with an application to UAVs. J. Intell. Mater. Syst. Struct. 2009, 20, 529–544. [Google Scholar] [CrossRef]
- Haddow, A.; Barr, A.; Mook, D. Theoretical and experimental study of modal interaction in a two-degree-of-freedom structure. J. Sound Vib. 1984, 97, 451–473. [Google Scholar] [CrossRef]
- Nayfeh, A.; Balachandran, B. Experimental investigation of resonantly forced oscillations of a two-degree-of-freedom structure. Int. J. Non-Linear Mech. 1990, 25, 199–209. [Google Scholar] [CrossRef]
- Xu, K.; Qian, X. Microstructure analysis and multi-unit cell model of three dimensionally four-directional braided composites. Appl. Compos. Mater. 2015, 22, 29–50. [Google Scholar] [CrossRef]
- Nie, X.; Tan, T.; Yan, Z.; Yan, Z.; Hajj, M. Broadband and high-efficient L-shaped piezoelectric energy harvester based on internal resonance. Int. J. Mech. Sci. 2019, 159, 287–305. [Google Scholar] [CrossRef]
- Kim, H.; Batra, A.; Priya, S.; Uchino, K.; Markley, D.; Newnham, R.; Hofmann, H. Energy harvesting using a piezoelectric “cymbal” transducer in dynamic environment. Jpn. J. Appl. Phys. 2004, 43, 6178. [Google Scholar] [CrossRef]
- Xiong, H.; Wang, L. Piezoelectric energy harvester for public roadway: On-site installation and evaluation. Appl. Energy 2016, 174, 101–107. [Google Scholar] [CrossRef]
- Arroyo, E.; Badel, A.; Formosa, F.; Wu, Y.; Qiu, J. Comparison of electromagnetic and piezoelectric vibration energy harvesters: Model and experiments. Sens. Actuators A Phys. 2012, 183, 148–156. [Google Scholar] [CrossRef]
- Li, D.; Wang, C.; Cui, X. Recent progress and development of interface integrated circuits for piezoelectric energy harvesting. Nano Energy 2022, 94, 106938. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, G.; Nie, X.; Wu, C. A multi-scale finite element approach for the mechanical behavior analysis of 3D braided composite structures. Compos. Struct. 2022, 279, 114711. [Google Scholar] [CrossRef]
- Zheng, X.; He, L.; Wang, S.; Liu, X.; Liu, R.; Cheng, G. A review of piezoelectric energy harvesters for harvesting wind energy. Sens. Actuators A Phys. 2023, 352, 114190. [Google Scholar] [CrossRef]
- Cao, Y.; Li, J.; Sha, A.; Liu, Z.; Zhang, F.; Li, X. A power-intensive piezoelectric energy harvester with efficient load utilization for road energy collection: Design, testing, and application. J. Clean. Prod. 2022, 369, 133287. [Google Scholar] [CrossRef]
- Sarker, M.; Julai, S.; Sabri, M.; Said, S.; Islam, M.; Tahir, M. Review of piezoelectric energy harvesting system and application of optimization techniques to enhance the performance of the harvesting system. Sens. Actuators A Phys. 2019, 300, 111634. [Google Scholar] [CrossRef]
- Zeng, T.; Fang, D.; Guo, L.; Ma, L. A mechanical model of 3D braided composites with transverse and longitudinal cracks. Compos. Struct. 2005, 69, 117–125. [Google Scholar] [CrossRef]
- Chen, L.; Tao, X.; Choy, C. Mechanical analysis of 3-D braided composites by the finite multiphase element method. Compos. Sci. Technol. 1999, 59, 2383–2391. [Google Scholar] [CrossRef]
- Yu, X.; Cui, J. The prediction on mechanical properties of 4-step braided composites via two-scale method. Compos. Sci. Technol. 2007, 67, 471–480. [Google Scholar] [CrossRef]
- Wang, B.; Fang, G.; Liang, J.; Wang, Z. Failure locus of 3D four-directional braided composites under biaxial loading. Appl. Compos. Mater. 2012, 19, 529–544. [Google Scholar] [CrossRef]
- Liu, Y.; Hou, Y.; Sapanathan, T.; Meng, L.; Xu, Y. Multiscale modeling of the mechanical behavior of 3D braided CFRP composites under uniaxial tension. Compos. Struct. 2023, 306, 116601. [Google Scholar] [CrossRef]
- Paknejad, A.; Rahimi, G.; Farrokhabadi, A.; Khatibi, M. Analytical solution of piezoelectric energy harvester patch for various thin multilayer composite beams. Compos. Struct. 2016, 154, 694–706. [Google Scholar] [CrossRef]
- Ansari, M.; Karami, M. Energy harvesting from controlled buckling of piezoelectric beams. Smart Mater. Struct. 2015, 24, 115005. [Google Scholar] [CrossRef]
- Bilisik, K. Three-dimensional braided for composites: A review. Text. Res. J. 2013, 83, 1414–1436. [Google Scholar] [CrossRef]
- Gu, Q.; Quan, Z.; Yu, J.; Yan, J.; Sun, B.; Xu, G. Structural modeling and mechanical characterizing of three-dimensional four-step braided composites: A review. Compos. Struct. 2019, 207, 119–128. [Google Scholar] [CrossRef]
- Du, X.; Li, D.; Jiang, L.; Fang, D. Numerical investigation on tensile behavior of three-dimensional six-directional braided composites. Int. J. Mech. Sci. 2023, 237, 107815. [Google Scholar] [CrossRef]
- Abedi, M.; Hassanshahi, O.; Barros, J.; Gomes, C.; Fangueiro, R. Three-dimensional braided composites as innovative smart structural reinforcements. Compos. Struct. 2022, 297, 115912. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometric Parameters | Parameter Symbol | Parameter Value (mm) |
|---|---|---|
| The length of the main beam of the L-shaped energy collector | L1 | 100 |
| The length of the auxiliary beam of the L-shaped energy collector | L2 | 60 |
| The thickness of the main and auxiliary beams of the L-shaped energy collector | H | 1 |
| The width of the main and auxiliary beams of the L-shaped energy collector | b | 10 |
| The thickness of the piezoelectric layer | hp | 0.2 |
| The thickness of three-dimensional braided composite material layers | hs | 0.6 |
| The length of the mass block A | Lm1 | 5 |
| The thickness of the mass block A | Hm1 | 5 |
| The width of the mass block A | bm1 | 12 |
| The length of the mass block B | Lm2 | 5 |
| The thickness of the mass block B | Hm2 | 5 |
| The width of the mass block B | bm2 | 12 |
| Density ρ (kg/m3) | Elastic Modulus E (GPa) | Poisson’s Ratio υ | Piezoelectric Stress Constant e31 (C/m2) | Dielectric Constant ε33 (nF/m) |
|---|---|---|---|---|
| 7500 | 60.6 | 0.289 | −16.6 | 25.55 |
| Material | E11 (GPa) | E22 (GPa) | E33 (GPa) | E44 (GPa) | E55 (GPa) | E66 (GPa) | υ12 | υ13 | υ23 | ρ (kg/m3) |
|---|---|---|---|---|---|---|---|---|---|---|
| Glass fiber-S | 85 | 36 | 36 | 36 | 15 | 15 | 0.22 | 0.17 | 0.17 | 2500 |
| TDE-85 | 4.5 | 4.5 | 4.5 | 4.5 | 4.5 | 4.5 | 0.34 | 0.34 | 0.34 | 1206 |
| Surface | x+ | x− | y+ | y− | z+ | z− |
|---|---|---|---|---|---|---|
| Displacement | u | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | v | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | w | 0 | |
| 0 | 0 | w | 0 | v | 0 | |
| w | 0 | 0 | 0 | u | 0 | |
| v | 0 | u | 0 | 0 | 0 |
| Braided Angles | E11 (GPa) | E22 (GPa) | E33 (GPa) | E44 (GPa) | E55 (GPa) | E66 (GPa) | υ12 | υ13 | υ23 |
|---|---|---|---|---|---|---|---|---|---|
| 20° | 28.49 | 11.61 | 11.21 | 4.24 | 4.27 | 2.07 | 0.336 | 0.325 | 0.268 |
| 25° | 25.87 | 12.59 | 11.32 | 4.54 | 4.48 | 2.26 | 0.351 | 0.326 | 0.273 |
| 30° | 21.73 | 14.37 | 11.36 | 4.86 | 4.68 | 2.57 | 0.334 | 0.329 | 0.278 |
| 35° | 20.94 | 14.99 | 13.92 | 5.23 | 5.14 | 3.15 | 0.381 | 0.325 | 0.285 |
| 40° | 18.59 | 15.34 | 14.87 | 5.86 | 5.95 | 3.27 | 0.376 | 0.369 | 0.279 |
| Braided Angles | First-Order Resonant Frequency (Hz) | Second-Order Resonant Frequency (Hz) | Third-Order Resonant Frequency (Hz) |
|---|---|---|---|
| 20° | 33.194 | 105.81 | 332.32 |
| 25° | 32.98 | 105.35 | 331.9 |
| 30° | 32.678 | 105.08 | 329.88 |
| 35° | 32.619 | 104.79 | 329.52 |
| 40° | 32.498 | 104.55 | 328.72 |
| Beam Length (mm) | First-Order Resonant Frequency (Hz) | Second-Order Resonant Frequency (Hz) | Third-Order Resonant Frequency (Hz) |
|---|---|---|---|
| 30 | 88.752 | 303.81 | 843.88 |
| 40 | 77.432 | 227.78 | 809.84 |
| 60 | 57.739 | 155.58 | 729.17 |
| 80 | 42.982 | 123.23 | 473.36 |
| 100 | 32.648 | 104.64 | 328.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, M.; Song, M.; Wei, G.; Hua, F. Electro-Mechanical Coupling Analysis of L-Shaped Three-Dimensional Braided Piezoelectric Composites Vibration Energy Harvester. Materials 2024, 17, 2858. https://doi.org/10.3390/ma17122858
Sun M, Song M, Wei G, Hua F. Electro-Mechanical Coupling Analysis of L-Shaped Three-Dimensional Braided Piezoelectric Composites Vibration Energy Harvester. Materials. 2024; 17(12):2858. https://doi.org/10.3390/ma17122858
Chicago/Turabian StyleSun, Mengfei, Ming Song, Gaofeng Wei, and Fengfeng Hua. 2024. "Electro-Mechanical Coupling Analysis of L-Shaped Three-Dimensional Braided Piezoelectric Composites Vibration Energy Harvester" Materials 17, no. 12: 2858. https://doi.org/10.3390/ma17122858