

Skin Comfort Sensation with Mechanical Stimulus from Electronic Skin

Abstract

1. Introduction
2. Analysis of Skin Sensation
2.1. Stress Distribution on the Skin
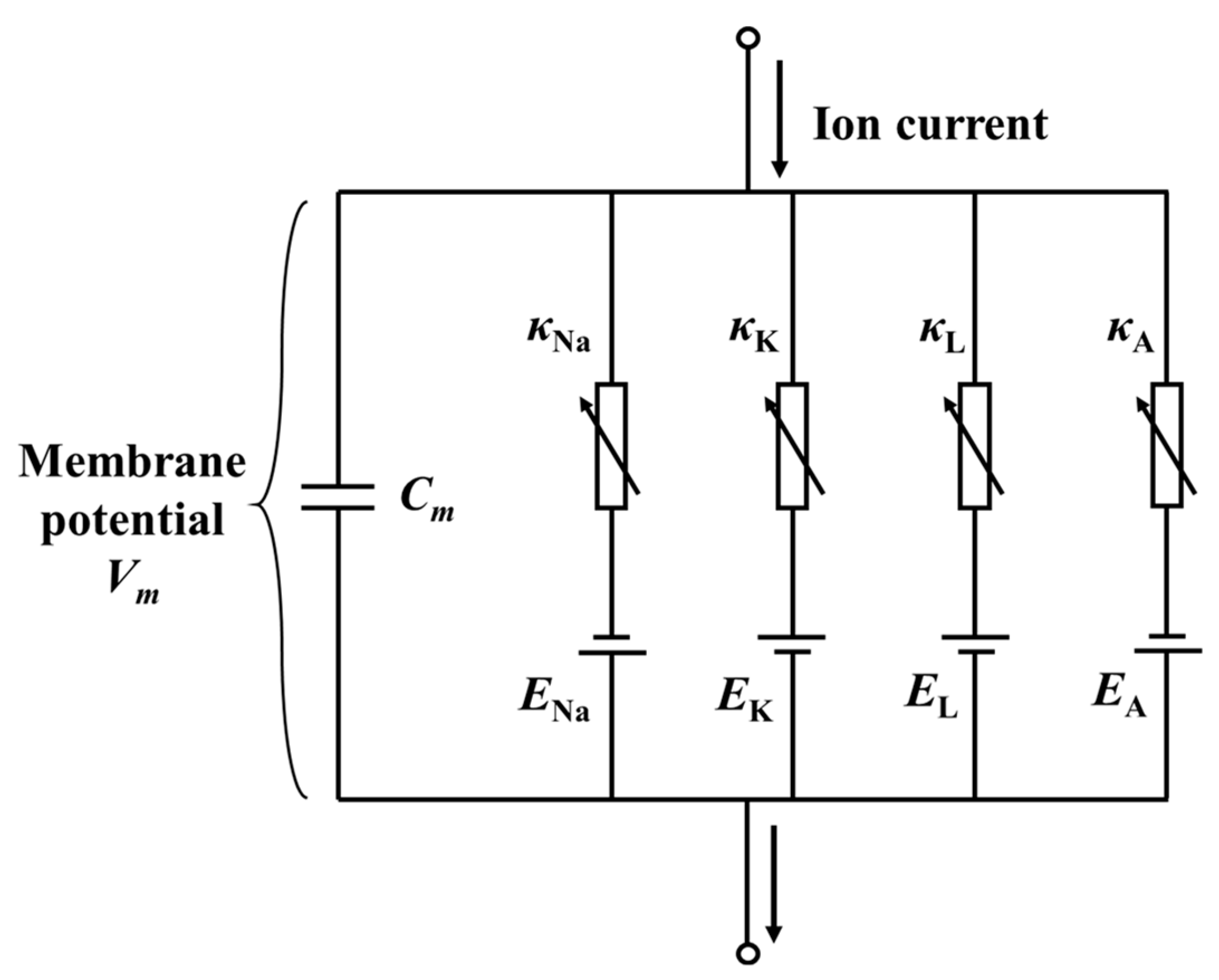
2.2. Model of Transduction
2.3. Model of Modulation and Perception
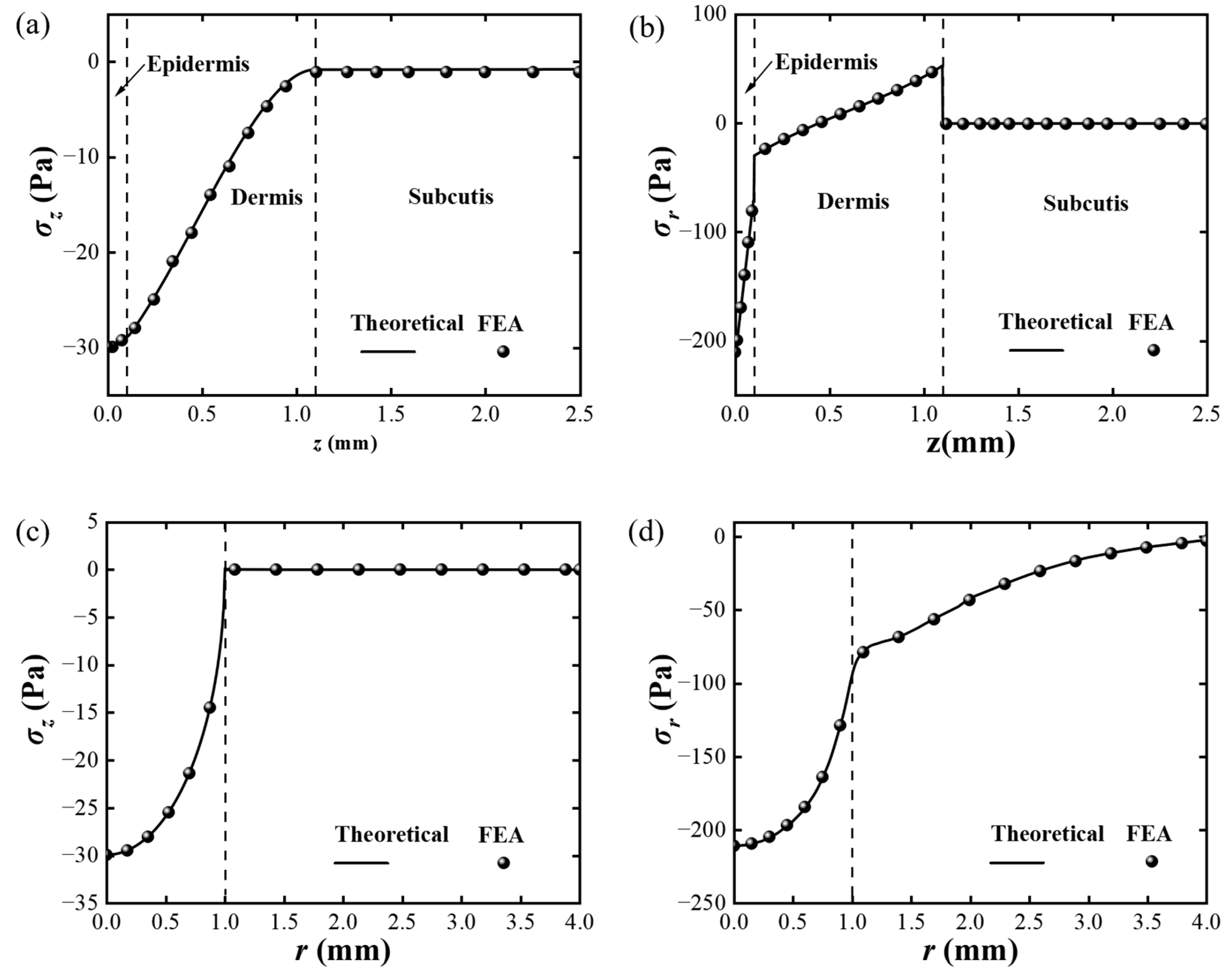
3. Verification of the Distribution of Stress on Skin
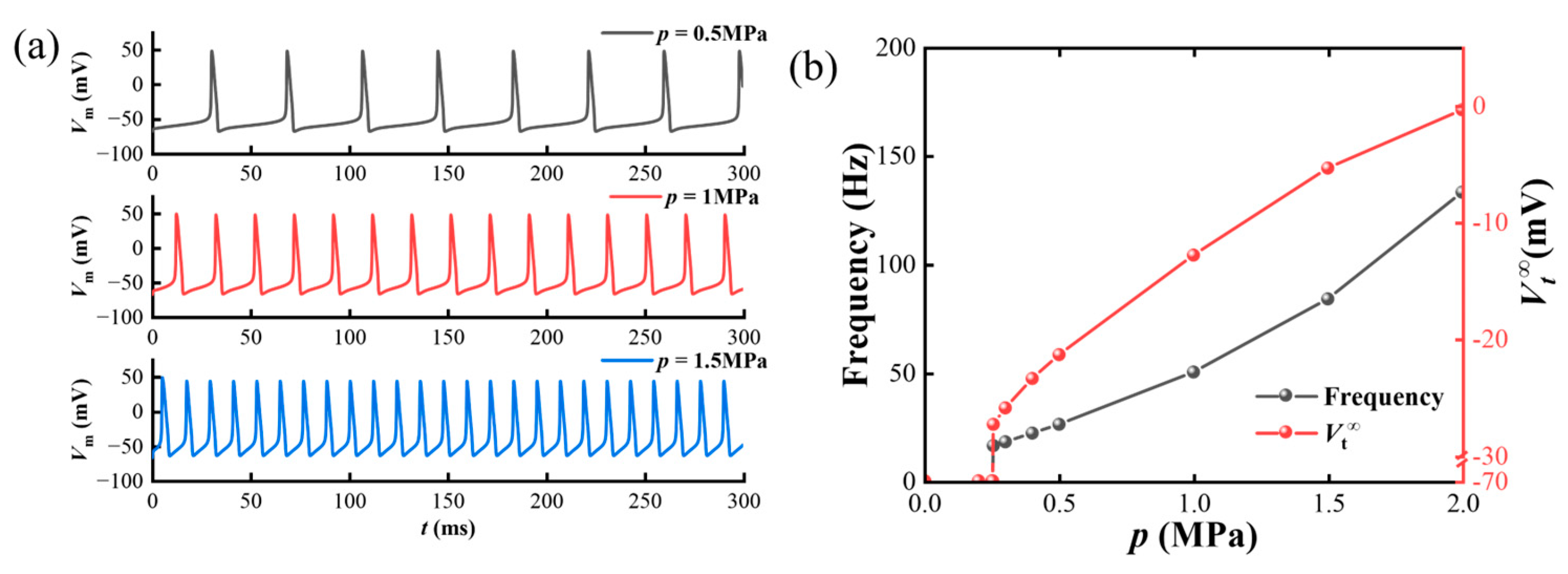
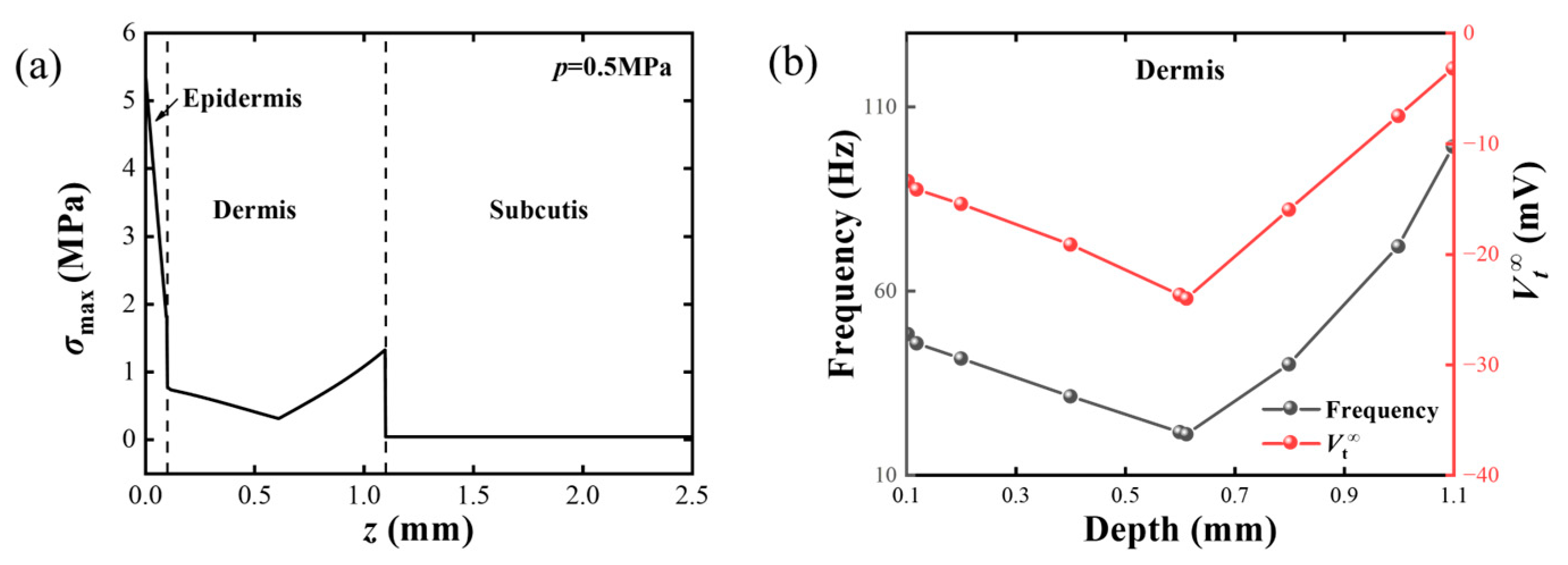
4. Case Study
5. Phase Diagram of Comfortable Electronic Skin Design
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Matrix Ψ(ξ, z)
Appendix B. Matrix N(ξ, z)
Appendix C. Governing Equations for Gating Variables in the Model of Transduction
References
- Yang, J.C.; Mun, J.; Kwon, S.Y.; Park, S.; Bao, Z.; Park, S. Electronic Skin: Recent Progress and Future Prospects for Skin-Attachable Devices for Health Monitoring, Robotics, and Prosthetics. Adv. Mater. 2019, 31, 1904765. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Li, S.; Wang, H.; Cheng, W.; Li, Y.; Pan, L.; Shi, Y. Advanced Electronic Skin Devices for Healthcare Applications. J. Mater. Chem. B 2019, 7, 173–197. [Google Scholar] [CrossRef]
- Wang, C.; Pan, C.; Wang, Z. Electronic Skin for Closed-Loop Systems. ACS Nano 2019, 13, 12287–12293. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Wang, S.; Wang, G.-J.N.; Zhu, C.; Luo, S.; Jin, L.; Gu, X.; Chen, S.; Feig, V.R.; To, J.W.F.; et al. Highly Stretchable Polymer Semiconductor Films through the Nanoconfinement Effect. Science 2017, 355, 59–64. [Google Scholar] [CrossRef] [PubMed]
- Kang, J.; Son, D.; Wang, G.; Liu, Y.; Lopez, J.; Kim, Y.; Oh, J.; Katsumata, T.; Mun, J.; Lee, Y.; et al. Tough and Water-Insensitive Self-Healing Elastomer for Robust Electronic Skin. Adv. Mater. 2018, 30, 1706846. [Google Scholar] [CrossRef] [PubMed]
- Yan, X.; Liu, Z.; Zhang, Q.; Lopez, J.; Wang, H.; Wu, H.; Niu, S.; Yan, H.; Wang, S.; Lei, T.; et al. Quadruple H-Bonding Cross-Linked Supramolecular Polymeric Materials as Substrates for Stretchable, Antitearing, and Self-Healable Thin Film Electrodes. J. Am. Chem. Soc. 2018, 140, 5280–5289. [Google Scholar] [CrossRef] [PubMed]
- Bunea, A.C.; Dediu, V.; Laszlo, E.A.; Pistriţu, F.; Carp, M.; Iliescu, F.S.; Ionescu, N.O.; Iliescu, C. E-skin: The dawn of a new era of on-body monitoring systems. Micromachines 2021, 12, 1091. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.; Fan, Z.; Yao, S.; Jin, T.; Lv, Z.; Lan, Y.; Bo, R.; Chen, Y.; Zhang, F.; Shen, Z.; et al. Programming 3D Curved Mesosurfaces Using Microlattice Designs. Science 2023, 379, 1225–1232. [Google Scholar] [CrossRef] [PubMed]
- Suhir, E. Predictive Modeling of the Dynamic Response of Electronic Systems to Shocks and Vibrations. Appl. Mech. Rev. 2011, 63, 050803. [Google Scholar] [CrossRef]
- Yang, S.; Sharma, P. A Tutorial on the Stability and Bifurcation Analysis of the Electromechanical Behaviour of Soft Materials. Appl. Mech. Rev. 2023, 75, 044801. [Google Scholar] [CrossRef]
- Yan, G.; Zou, H.X.; Wang, S.; Zhao, L.C.; Wu, Z.Y.; Zhang, W.M. Bio-Inspired Vibration Isolation: Methodology and Design. Appl. Mech. Rev. 2021, 73, 020801. [Google Scholar] [CrossRef]
- Tee, B.; Chortos, A.; Dunn, R.; Schwartz, G.; Eason, E.; Bao, Z. Tunable Flexible Pressure Sensors Using Microstructured Elastomer Geometries for Intuitive Electronics. Adv. Funct. Mater. 2014, 24, 5427–5434. [Google Scholar] [CrossRef]
- Kim, J.O.; Kwon, S.Y.; Kim, Y.; Choi, H.B.; Yang, J.C.; Oh, J.; Lee, H.S.; Sim, J.Y.; Ryu, S.; Park, S. Highly Ordered 3D Microstructure-Based Electronic Skin Capable of Differentiating Pressure, Temperature, and Proximity. ACS Appl. Mater. Interfaces 2019, 11, 1503–1511. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Matsumura, G.; Xuan, Y.; Honda, S.; Takei, K. Stretchable Electronic Skin using Laser-Induced Graphene and Liquid Metal with an Action Recognition System Powered by Machine Learning. Adv. Funct. Mater. 2024, 2313824. [Google Scholar] [CrossRef]
- Boutry, C.M.; Negre, M.; Jorda, M.; Vardoulis, O.; Chortos, A.; Khatib, O.; Bao, Z. A Hierarchically Patterned, Bioinspired e-Skin Able to Detect the Direction of Applied Pressure for Robotics. Sci. Robot. 2018, 3, eaau6914. [Google Scholar] [CrossRef]
- Kulkarni, M.B.; Rajagopal, S.; Prieto-Simón, B.; Pogue, B.W. Recent advances in smart wearable sensors for continuous human health monitoring. Talanta 2024, 272, 125817. [Google Scholar] [CrossRef] [PubMed]
- Ashwin, K.; Ghosal, A. A Survey on Static Modeling of Miniaturized Pneumatic Artificial Muscles with New Model and Experimental Results. Appl. Mech. Rev. 2018, 70, 040802. [Google Scholar] [CrossRef]
- Gao, W.; Emaminejad, S.; Nyein, H.; Challa, S.; Chen, K.; Peck, A.; Fahad, H.; Ota, H.; Shiraki, H.; Kiriya, D.; et al. Fully Integrated Wearable Sensor Arrays for Multiplexed in Situ Perspiration Analysis. Nature 2016, 529, 509–514. [Google Scholar] [CrossRef]
- Sempionatto, J.; Nakagawa, T.; Pavinatto, A.; Mensah, S.; Imani, S.; Mercier, P.; Wang, J. Eyeglasses Based Wireless Electrolyte and Metabolite Sensor Platform. Lab. Chip 2017, 17, 1834–1842. [Google Scholar] [CrossRef]
- Emaminejad, S.; Gao, W.; Wu, E.; Davies, Z.; Nyein, H.; Challa, S.; Ryan, S.; Fahad, H.; Chen, K.; Shahpar, Z.; et al. Autonomous Sweat Extraction and Analysis Applied to Cystic Fibrosis and Glucose Monitoring Using a Fully Integrated Wearable Platform. Proc. Natl. Acad. Sci. USA 2017, 114, 4625–4630. [Google Scholar] [CrossRef]
- Lee, H.; Choi, T.; Lee, Y.; Cho, H.; Ghaffari, R.; Wang, L.; Choi, H.; Chung, T.; Lu, N.; Hyeon, T.; et al. A Graphene-Based Electrochemical Device with Thermoresponsive Microneedles for Diabetes Monitoring and Therapy. Nat. Nanotechnol. 2016, 11, 566–572. [Google Scholar] [CrossRef] [PubMed]
- Gamella, M.; Campuzano, S.; Manso, J.; de Rivera, G.; Lopez-Colino, F.; Reviejo, A.; Pingarron, J. A Novel Non-Invasive Electrochemical Biosensing Device for in Situ Determination of the Alcohol Content in Blood by Monitoring Ethanol in Sweat. Anal. Chim. Acta 2014, 806, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Campbell, A.; Kim, J.; Wang, J. Wearable Electrochemical Alcohol Biosensors. Curr. Opin. Electrochem. 2018, 10, 126–135. [Google Scholar] [CrossRef] [PubMed]
- Guinovart, T.; Bandodkar, A.J.; Windmiller, J.R.; Andrade, F.J.; Wang, J. A Potentiometric Tattoo Sensor for Monitoring Ammonium in Sweat. Analyst 2013, 138, 7031–7038. [Google Scholar] [CrossRef] [PubMed]
- Bandodkar, A.; Molinnus, D.; Mirza, O.; Guinovart, T.; Windmiller, J.; Valdes-Ramirez, G.; Andrade, F.J.; Schoning, M.; Wang, J. Epidermal Tattoo Potentiometric Sodium Sensors with Wireless Signal Transduction for Continuous Non-Invasive Sweat Monitoring. Biosens. Bioelectron. 2014, 54, 603–609. [Google Scholar] [CrossRef] [PubMed]
- Bariya, M.; Nyein, H.; Javey, A. Wearable Sweat Sensors. Nat. Electron. 2018, 1, 160–171. [Google Scholar] [CrossRef]
- Pani, D.; Achilli, A.; Bonfiglio, A. Survey on Textile Electrode Technologies for Electrocardiographic (ECG) Monitoring, from Metal Wires to Polymers. Adv. Mater. Technol. 2018, 3, 1800008. [Google Scholar] [CrossRef]
- Satti, A.T.; Park, J.; Park, J.; Kim, H.; Cho, S. Fabrication of Parylene-Coated Microneedle Array Electrode for Wearable ECG Device. Sensors 2020, 20, 5183. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Qiu, Y.; Ameri, S.K.; Jang, H.; Dai, Z.; Huang, Y.; Lu, N. Low-Cost, Μm-Thick, Tape-Free Electronic Tattoo Sensors with Minimized Motion and Sweat Artifacts. NPJ Flex. Electron. 2018, 2, 6. [Google Scholar] [CrossRef]
- Lee, W.; Kobayashi, S.; Nagase, M.; Jimbo, Y.; Saito, I.; Inoue, Y.; Yambe, T.; Sekino, M.; Malliaras, G.; Yokota, T.; et al. Nonthrombogenic, Stretchable, Active Multielectrode Array for Electroanatomical Mapping. Sci. Adv. 2018, 4, eeaau2426. [Google Scholar] [CrossRef]
- Fayyaz Shahandashti, P.; Pourkheyrollah, H.; Jahanshahi, A.; Ghafoorifard, H. Highly Conformable Stretchable Dry Electrodes Based on Inexpensive Flex Substrate for Long-Term Biopotential (EMG/ECG) Monitoring. Sens. Actuators Phys. 2019, 295, 678–686. [Google Scholar] [CrossRef]
- Reilly, R.B.; Lee, T.C. Electrograms (ECG, EEG, EMG, EOG). Technol. Health Care 2010, 18, 443–458. [Google Scholar] [CrossRef] [PubMed]
- Guitchounts, G.; Markowitz, J.; Liberti, W.; Gardner, T. ACarbon-Fiber Electrode Array for Long-Term Neural Recording. J. Neural Eng. 2013, 10, 046016. [Google Scholar] [CrossRef] [PubMed]
- Jang, K.; Jung, H.; Lee, J.; Xu, S.; Liu, Y.; Ma, Y.; Jeong, J.; Song, Y.; Kim, J.; Kim, B.; et al. Ferromagnetic, Folded Electrode Composite as a Soft Interface to the Skin for Long-Term Electrophysiological Recording. Adv. Funct. Mater. 2016, 26, 7281–7290. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Xiao, X.; Zhao, X.; Tat, T.; Bick, M.; Chen, J. Electronic Textiles for Wearable Point-of-Care Systems. Chem. Rev. 2022, 122, 3259–3291. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.; Zhao, Z.; Li, Y. Theoretical Experimental Research on Anisotropic Nonlinear Mechanics of Periodic Network Materials. J. Mech. Phys. Solids 2021, 152, 104458. [Google Scholar] [CrossRef]
- Ma, Q.; Cheng, H.; Jang, K.I.; Luan, H.; Hwang, K.C.; Rogers, J.A.; Huang, Y.; Zhang, Y. A Nonlinear Mechanics Model of Bio-Inspired Hierarchical Lattice Materials Consisting of Horseshoe Microstructures. J. Mech. Phys. Solids 2016, 90, 179–202. [Google Scholar] [CrossRef] [PubMed]
- Ji, D.; Shi, Y.; Yin, Y.; Dong, S.; Wang, Y.; Li, Y. Skin Pain Sensation under Mechanical Stimulus: Wind-up Ramp-Off. J. Appl. Mech. 2022, 89, 111003. [Google Scholar] [CrossRef]
- Ji, D.; Shi, Y.; Chen, J.; Zhao, Z.; Zhao, G. Mathematical Model for Skin Pain Sensation under Local Distributed Mechanical Compression for Electronic Skin Applications. Micromachines 2022, 13, 1402. [Google Scholar] [CrossRef]
- Yin, Y.; Li, Y.; Li, M. Thermal Analysis of the Flexible Electronics Affixed on Large Curvature Myocardium Surface. Int. J. Heat Mass Transf. 2020, 147, 118983. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, C.; Yin, Y.; Li, Y.; Xing, Y.; Song, J. Functional Soft Composites As Thermal Protecting Substrates for Wearable Electronics. Adv. Funct. Mater. 2019, 29, 1905470. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, J.; Xing, Y.; Song, J. Thermomechanical Analysis of Epidermal Electronic Devices Integrated With Human Skin. J. Appl. Mech. 2017, 84, 111004. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Y.; Xing, Y.; Song, J. Transient Thermomechanical Analysis of Epidermal Electronic Devices on Human Skin. Mech. Mater. 2019, 137, 103097. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Y.; Xing, Y.; Song, J. Three-Dimensional Thermomechanical Analysis of Epidermal Electronic Devices on Human Skin. Int. J. Solids Struct. 2019, 167, 48–57. [Google Scholar] [CrossRef]
- Cui, Y.; Li, Y.; Xing, Y.; Yang, T.; Song, J. Three-Dimensional Thermal Analysis of Rectangular Micro-Scale Inorganic Light-Emitting Diodes Integrated with Human Skin. Int. J. Therm. Sci. 2018, 127, 321–328. [Google Scholar] [CrossRef]
- Li, Y.; Chen, J.; Zhao, S.; Song, J. Recent Advances on Thermal Management of Flexible Inorganic Electronics. Micromachines 2020, 11, 390. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wang, H.; He, T.; He, B.; Thakor, N.; Lee, C. Investigation of Low-Current Direct Stimulation for Rehabilitation Treatment Related to Muscle Function Loss Using Self-Powered TENG System. Adv. Sci. 2019, 6, 1900149. [Google Scholar] [CrossRef] [PubMed]
- Jeong, S.H.; Lee, Y.; Lee, M.G.; Song, W.J.; Park, J.U.; Sun, J.Y. Accelerated Wound Healing with an Ionic Patch Assisted by a Triboelectric Nanogenerator. Nano Energy 2021, 79, 105463. [Google Scholar] [CrossRef]
- Liu, G.; Sun, L.; Su, Y. Scaling Effects in the Mechanical System of the Flexible Epidermal Electronics the Human Skin. J. Appl. Mech. 2020, 87, 081007. [Google Scholar] [CrossRef]
- Ma, Q.; Zhang, Y. Mechanics of Fractal-Inspired Horseshoe Microstructures for Applications in Stretchable Electronics. J. Appl. Mech. 2016, 83, 111008. [Google Scholar] [CrossRef]
- Ma, Y.; Feng, X.; Rogers, J.A.; Huang, Y.; Zhang, Y. Design and Application of ‘J-Shaped’ Stress–Strain Behavior in Stretchable Electronics: A Review. Lab. Chip 2017, 17, 1689–1704. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.; Li, M.; Yang, Z.; Li, Y. Stretch-Induced Shear Deformation in Periodic Soft Networks. Extreme Mech. Lett. 2021, 47, 101370. [Google Scholar] [CrossRef]
- Xu, F.; Wen, T.; Seffen, K.; Lu, T. Modeling of Skin Thermal Pain: A Preliminary Study. Appl. Math. Comput. 2008, 205, 37–46. [Google Scholar] [CrossRef]
- Xu, F.; Lu, T.J.; Seffen, K.A. Skin Thermal Pain Modeling—A Holistic Method. J. Therm. Biol. 2008, 33, 223–237. [Google Scholar] [CrossRef]
- Xu, F.; Wen, T.; Lu, T.J.; Seffen, K.A. Modeling of Nociceptor Transduction in Skin Thermal Pain Sensation. J. Biomech. Eng. 2008, 130, 041013. [Google Scholar] [CrossRef] [PubMed]
- Xu, F.; Lu, T.J.; Seffen, K.A.; Ng, E.Y.K. Mathematical Modeling of Skin Bioheat Transfer. Appl. Mech. Rev. 2009, 62, 050801. [Google Scholar] [CrossRef]
- Zhu, Y.J.; Lu, T.J. A Multi-Scale View of Skin Thermal Pain: From Nociception to Pain Sensation. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2010, 368, 521–559. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.; Li, M.; Li, Y.; Song, J. Skin Pain Sensation of Epidermal Electronic Device/Skin System Considering Non-Fourier Heat Conduction. J. Mech. Phys. Solids 2020, 138, 103927. [Google Scholar] [CrossRef]
- Wissler, E.H. Whole-Body Human Thermal Modeling an Alternative to Immersion in Cold Water Other Unpleasant Endeavors. J. Heat Transf. 2012, 134, 031019. [Google Scholar] [CrossRef]
- Deng, Z.-S.; Liu, J. Analytical Study on Bioheat Transfer Problems with Spatial or Transient Heating on Skin Surface or Inside Biological Bodies. J. Biomech. Eng. 2002, 124, 638–649. [Google Scholar] [CrossRef]
- Diller, K.R.; Hayes, L.J. A Finite Element Model of Burn Injury in Blood-Perfused Skin. J. Biomech. Eng. 1983, 105, 300–307. [Google Scholar] [CrossRef] [PubMed]
- Alotaibi, A.M.; Anwar, S.; Terry Loghmani, M. Skin Modeling Analysis of a Force Sensing Instrument-Assisted Soft Tissue Manipulation Device. J. Eng. Sci. Med. Diagn. Ther. 2018, 1, 031002. [Google Scholar] [CrossRef]
- Liu, Y.; Yiu, C.K.; Zhao, Z.; Liu, S.; Huang, X.; Park, W.; Su, J.; Zhou, J.; Wong, T.H.; Yao, K.; et al. Skin-Integrated Haptic Interfaces Enabled by Scalable Mechanical Actuators for Virtual Reality. IEEE Internet Things J. 2023, 10, 653–663. [Google Scholar] [CrossRef]
- Yang, F.; Li, J.C.M. Impression Test—A Review. Mater. Sci. Eng. R Rep. 2013, 74, 233–253. [Google Scholar] [CrossRef]
- Ho, H.-N.; Jones, L.A. Modeling the Thermal Responses of the Skin Surface During Hand-Object Interactions. J. Biomech. Eng. 2008, 130, 021005. [Google Scholar] [CrossRef] [PubMed]
- Connor, J.A.; Walter, D.; McKown, R. Neural Repetitive Firing: Modifications of the Hodgkin-Huxley Axon Suggested by Experimental Results from Crustacean Axons. Biophys. J. 1977, 18, 81–102. [Google Scholar] [CrossRef] [PubMed]
- Britton, N.F.; Skevington, S.M. AMathematical Model of the Gate Control Theory of Pain. J. Theor. Biol. 1989, 137, 91–105. [Google Scholar] [CrossRef] [PubMed]
- Britton, N.; Skevington, S.; Chaplain, M. Mathematical Modelling of Acute Pain. J. Biol. Syst. 1995, 3, 1119–1124. [Google Scholar] [CrossRef]
- Prince, K.; Campbell, J.; Picton, P.; Turner, S. A Computational Model of Acute Pain. Int. J. Simul. Syst. Sci. Technol. 2005, 6, 1. [Google Scholar]
- Tan, C.Y.; Statham, B.; Marks, R.; Payne, A. Skin Thickness Measurement by Pulsed Ultrasound: Its Reproducibility, Validation and Variability. Br. J. Dermatol. 1982, 106, 657–667. [Google Scholar]
- Hodgkin, A.L.; Huxley, A.F. Currents Carried by Sodium Potassium Ions through the Membrane of the Giant Axon of Loligo. J. Physiol. 1952, 116, 449–472. [Google Scholar] [CrossRef] [PubMed]
- Tillman, D.B.; Treede, R.D.; Meyer, R.A.; Campbell, J.N. Response of CFibre Nociceptors in the Anaesthetized Monkey to Heat Stimuli: Estimates of Receptor Depth Threshold. J. Physiol. 1995, 485, 753–765. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Thickness (mm) | E (MPa) | Ν | |
|---|---|---|---|
| Dermis | 0.1 | 102 | 0.48 |
| Epidermis | 1 | 10 | 0.48 |
| Subcutis | 1.4 | 0.01 | 0.48 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, D.; Zhu, Y.; Li, M.; Fan, X.; Zhang, T.; Li, Y. Skin Comfort Sensation with Mechanical Stimulus from Electronic Skin. Materials 2024, 17, 2920. https://doi.org/10.3390/ma17122920
Ji D, Zhu Y, Li M, Fan X, Zhang T, Li Y. Skin Comfort Sensation with Mechanical Stimulus from Electronic Skin. Materials. 2024; 17(12):2920. https://doi.org/10.3390/ma17122920
Chicago/Turabian StyleJi, Dongcan, Yunfan Zhu, Min Li, Xuanqing Fan, Taihua Zhang, and Yuhang Li. 2024. "Skin Comfort Sensation with Mechanical Stimulus from Electronic Skin" Materials 17, no. 12: 2920. https://doi.org/10.3390/ma17122920
APA StyleJi, D., Zhu, Y., Li, M., Fan, X., Zhang, T., & Li, Y. (2024). Skin Comfort Sensation with Mechanical Stimulus from Electronic Skin. Materials, 17(12), 2920. https://doi.org/10.3390/ma17122920