Deflection and Performance Analysis of Shape Memory Alloy-Driven Fiber–Elastomer Composites with Anisotropic Structure

 , , , , ,
, , , , , 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
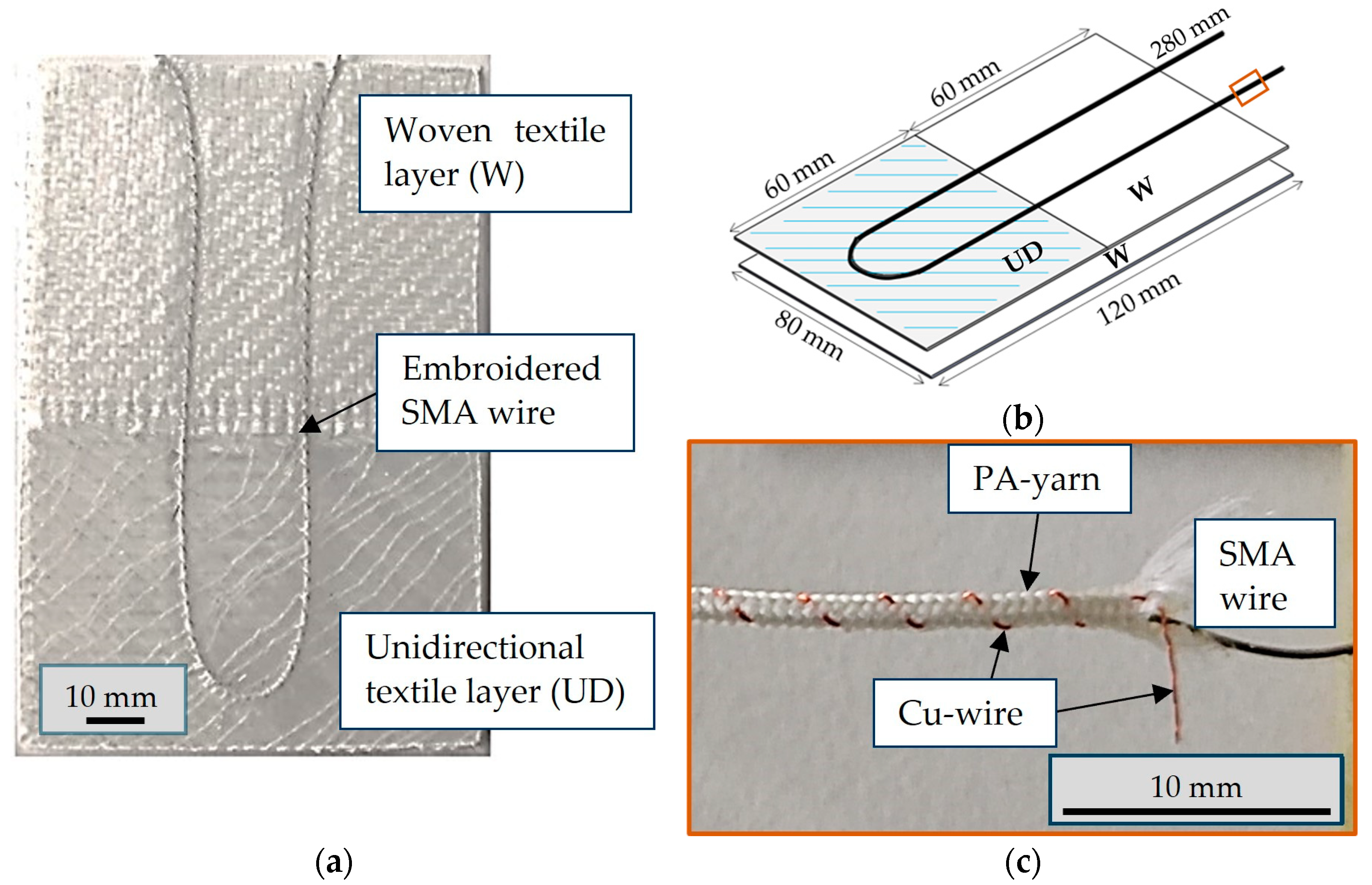
2.1. Actuator Design and Manufacturing
- Overbraid the SMA wire with polyamide yarn (PA yarn) and copper wire (cu wire);
- Place the glass fiber textile layers;
- Tailor the fiber placement of the braided SMA wire on the textile;
- Infiltrate the textile with polydimethylsiloxane (PDMS) to form the soft actuator with vacuum-assisted infusion process (VARI process);
- Cut the sample to size.
2.2. Activation of the Structure
- Load cycling at the beginning of the test to stabilize the actuator behavior;
- Carrying out of preliminary tests based on previous investigations [30] and carrying out of subsequent adaptations;
- Selection of parameters:
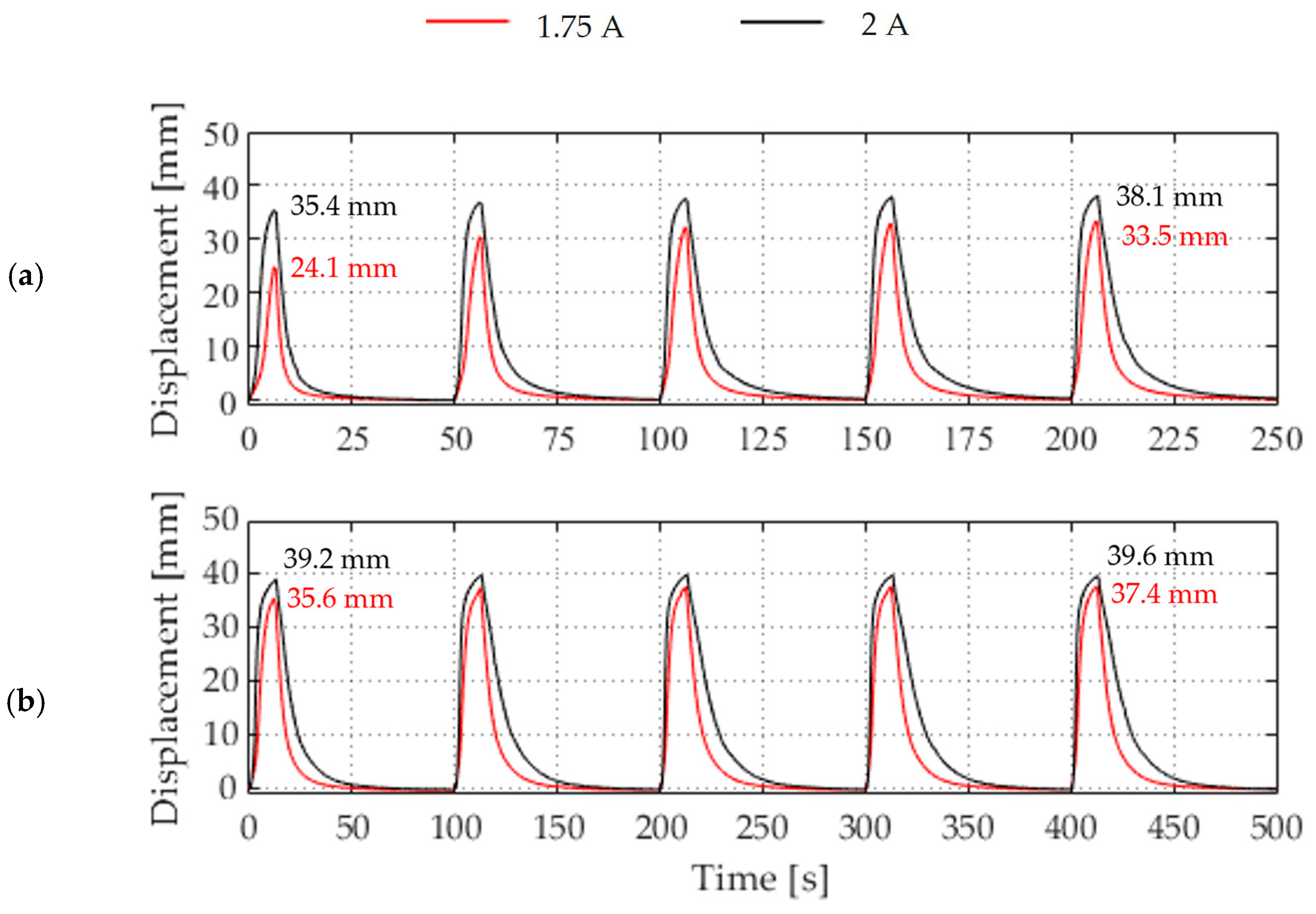
- Switch-on time of 5 s and switch-off time of 45 s as main setting;
- Doubling of the switch-on and switch-off times for two electrical settings: 10 s switch-on time and 90 s switch-off time.
2.3. Measurement Methodology
3. Results and Discussion
3.1. Influence of Activation Parameters and Temperature on Deflection
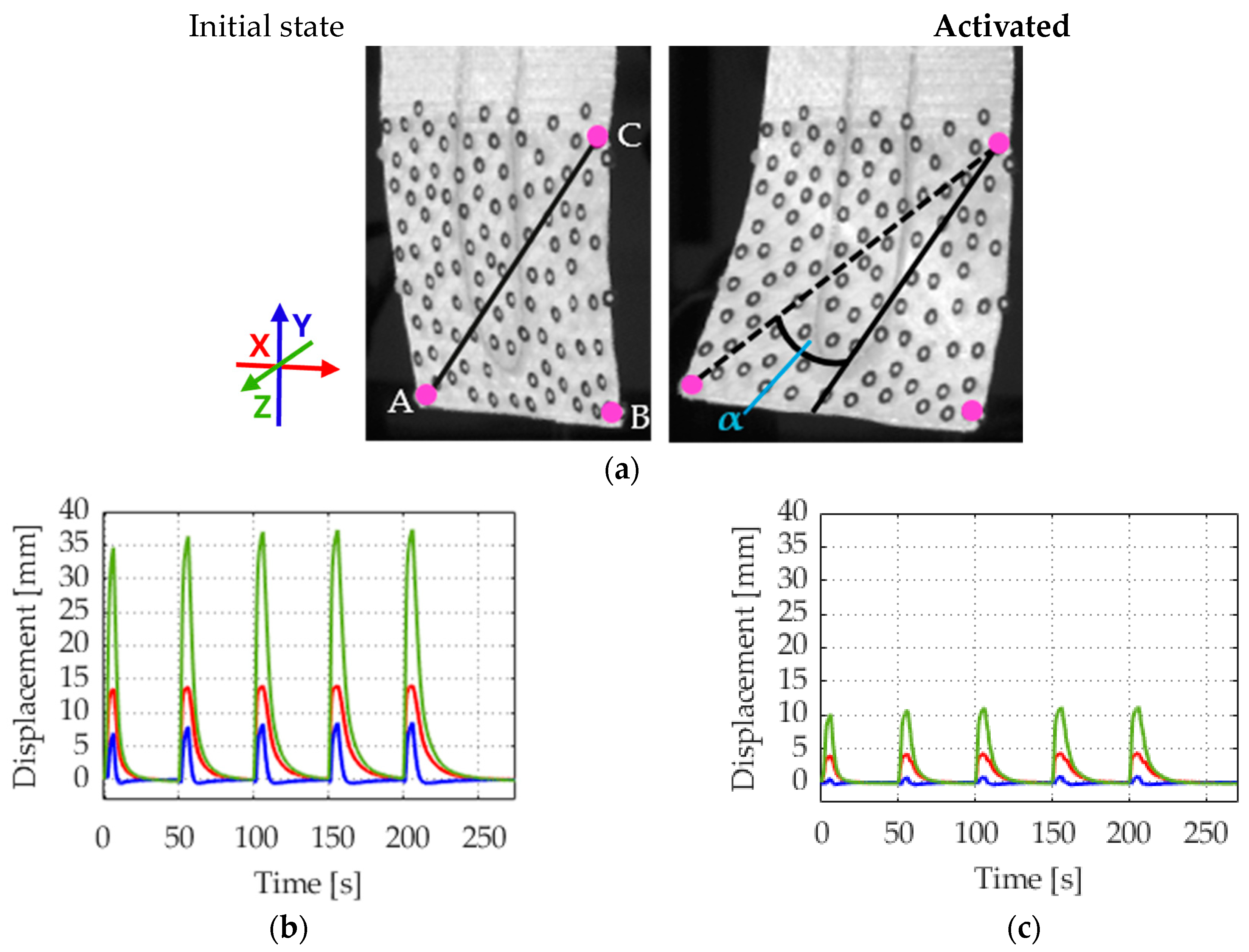
3.2. Three-Dimensional Actuator Deflection
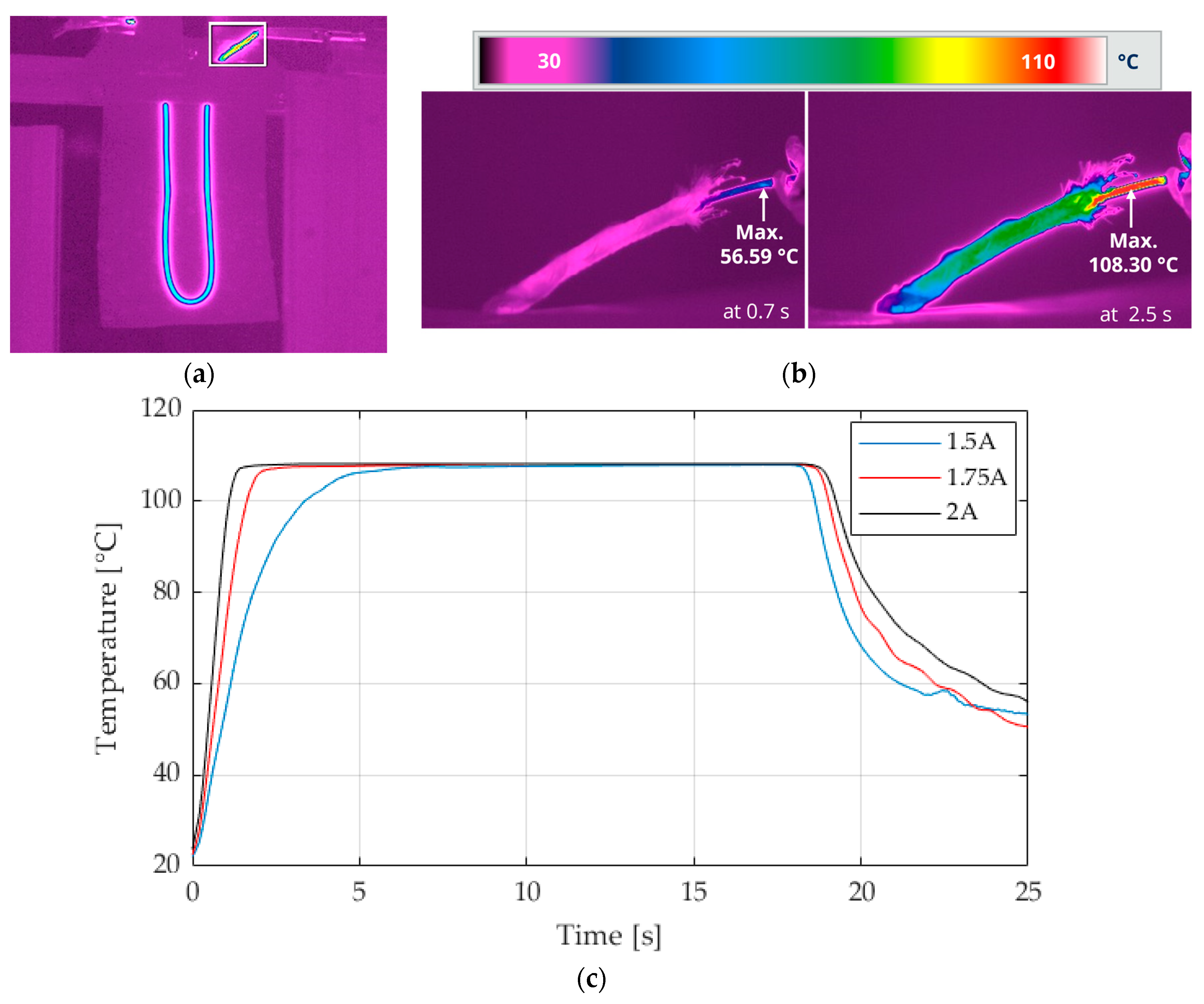
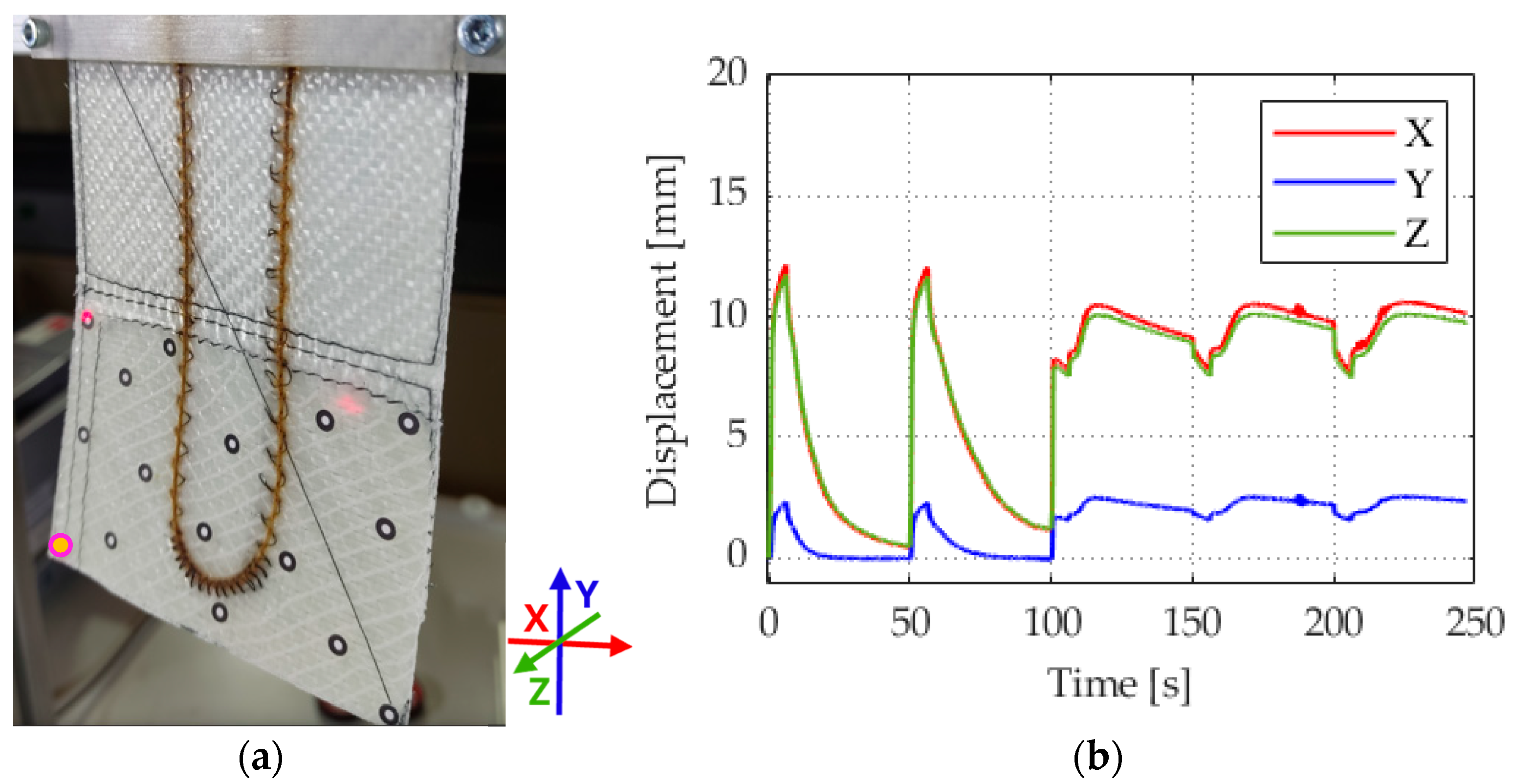
3.3. Maximum Actuation Due to Overheating of the Actuator
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gariya, N.; Kumar, P. A review on soft materials utilized for the manufacturing of soft robots. Mater. Today Proc. 2021, 46, 11177–11181. [Google Scholar] [CrossRef]
- Huang, X.; Kumar, K.; Jawed, M.K.; Mohammadi Nasab, A.; Ye, Z.; Shan, W.; Majidi, C. Highly Dynamic Shape Memory Alloy Actuator for Fast Moving Soft Robots. Adv. Mater. Technol. 2019, 4, 1800540. [Google Scholar] [CrossRef]
- El-Atab, N.; Mishra, R.B.; Al-Modaf, F.; Joharji, L.; Alsharif, A.A.; Alamoudi, H.; Diaz, M.; Qaiser, N.; Hussain, M.M. Soft Actuators for Soft Robotic Applications: A Review. Adv. Intell. Syst. 2020, 2, 2000128. [Google Scholar] [CrossRef]
- Bar-Cohen, Y.; Anderson, I.A. Electroactive polymer (EAP) actuators—Background review. Mech. Soft Mater. 2019, 1, 5. [Google Scholar] [CrossRef]
- Carpi, F.; Kornbluh, R.; Sommer-Larsen, P.; Alici, G. Electroactive polymer actuators as artificial muscles: Are they ready for bioinspired applications? Bioinspir. Biomim. 2011, 6, 45006. [Google Scholar] [CrossRef]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef]
- Kumar, S.; Shivashankar, P.; Gopalakrishnan, S. A half a decade timeline of shape memory alloys in modeling and applications. ISSS J. Micro Smart Syst. 2020, 9, 1–32. [Google Scholar] [CrossRef]
- Lagoudas, D.C. Shape Memory Alloys: Modeling and Engineering Applications; Springer: Boston, MA, USA, 2008. [Google Scholar]
- Kim, M.-S.; Heo, J.-K.; Rodrigue, H.; Lee, H.-T.; Pané, S.; Han, M.-W.; Ahn, S.-H. Shape Memory Alloy (SMA) Actuators: The Role of Material, Form, and Scaling Effects. Adv. Mater. 2023, 35, e2208517. [Google Scholar] [CrossRef]
- Langbein, S.; Czechowicz, A. Konstruktionspraxis Formgedächtnistechnik: Potentiale-Auslegung-Beispiele; Springer: Wiesbaden, Germany, 2013; ISBN 3834819573. [Google Scholar]
- Otsuka, K.; Wayman, C.M. Shape Memory Materials; Cambridge University Press: Cambridge, UK, 1999; pp. 97–126. ISBN 0521663849. [Google Scholar]
- Petrini, L.; Migliavacca, F. Biomedical Applications of Shape Memory Alloys. J. Metall. 2011, 2011, 501483. [Google Scholar] [CrossRef]
- Chengli, S. History and Current Situation of Shape Memory Alloys Devices for Minimally Invasive Surgery. Open Med. Devices J. 2010, 2, 24–31. [Google Scholar]
- Do, P.T.; Le, Q.N.; Luong, Q.V.; Kim, H.-H.; Park, H.-M.; Kim, Y.-J. Tendon-Driven Gripper with Variable Stiffness Joint and Water-Cooled SMA Springs. Actuators 2023, 12, 160. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Kim, D.-R.; Ahn, S.-H. Curved shape memory alloy-based soft actuators and application to soft gripper. Compos. Struct. 2017, 176, 398–406. [Google Scholar] [CrossRef]
- Duerig, T.W.; Melton, K.N.; Stöckel, D. Engineering Aspects of Shape Memory Alloys; 1. publ; Butterworth-Heinemann: London, UK, 1990; ISBN 978-0-7506-1009-4. [Google Scholar]
- Abramovich, H. Intelligent Materials and Structures, 2nd ed.; De Gruyter: Berlin, Germany; Boston, MA, USA, 2021; ISBN 9783110726695. [Google Scholar]
- Ruth, D.J.S.; Sohn, J.-W.; Dhanalakshmi, K.; Choi, S.-B. Control Aspects of Shape Memory Alloys in Robotics Applications: A Review over the Last Decade. Sensors 2022, 22, 4860. [Google Scholar] [CrossRef]
- Ikuta, K. Micro/miniature shape memory alloy actuator. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; IEEE Computer Society Press: Los Alamitos, CA, USA, 1990; pp. 2156–2161, ISBN 0-8186-9061-5. [Google Scholar]
- Ashrafiuon, H.; Eshraghi, M.; Elahinia, M.H. Position Control of a Three-link Shape Memory Alloy Actuated Robot. J. Intell. Mater. Syst. Struct. 2006, 17, 381–392. [Google Scholar] [CrossRef]
- Deng, E.; Tadesse, Y. A Soft 3D-Printed Robotic Hand Actuated by Coiled SMA. Actuators 2021, 10, 6. [Google Scholar] [CrossRef]
- Bodkhe, S.; Vigo, L.; Zhu, S.; Testoni, O.; Aegerter, N.; Ermanni, P. 3D printing to integrate actuators into composites. Addit. Manuf. 2020, 35, 101290. [Google Scholar] [CrossRef]
- Song, S.-H.; Kim, M.-S.; Rodrigue, H.; Lee, J.-Y.; Shim, J.-E.; Kim, M.-C.; Chu, W.-S.; Ahn, S.-H. Turtle mimetic soft robot with two swimming gaits. Bioinspir. Biomim. 2016, 11, 36010. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, F.; Lan, X.; Leng, J.; Wu, A.S.; Bryson, T.M.; Cotton, C.; Gu, B.; Sun, B.; Chou, T.-W. Shape memory behavior and recovery force of 4D printed textile functional composites. Compos. Sci. Technol. 2018, 160, 224–230. [Google Scholar] [CrossRef]
- Hann, S.Y.; Cui, H.; Nowicki, M.; Zhang, L.G. 4D printing soft robotics for biomedical applications. Addit. Manuf. 2020, 36, 101567. [Google Scholar] [CrossRef]
- Priyadarshi, A.; Bin Shahrani, S.; Choma, T.; Zrodowski, L.; Qin, L.; Leung, C.L.A.; Clark, S.J.; Fezzaa, K.; Mi, J.; Lee, P.D.; et al. New insights into the mechanism of ultrasonic atomization for the production of metal powders in additive manufacturing. Addit. Manuf. 2024, 83, 104033. [Google Scholar] [CrossRef]
- Rurup, J.D.; Secor, E.B. In-situ qualification and physics-based process design for aerosol jet printing via spatially correlated light scattering measurements. Addit. Manuf. 2024, 82, 104037. [Google Scholar] [CrossRef]
- Lohse, F.; Kopelmann, K.; Grellmann, H.; Ashir, M.; Gereke, T.; Häntzsche, E.; Sennewald, C.; Cherif, C. Experimental and Numerical Analysis of the Deformation Behavior of Adaptive Fiber-Rubber Composites with Integrated Shape Memory Alloys. Materials 2022, 15, 582. [Google Scholar] [CrossRef] [PubMed]
- Annadata, A.; Endesfelder, A.; Koenigsdorff, M.; Mersch, J.; Gereke, T.; Zimmermann, M.; Cherif, C. Evaluation of Bend-Twist Coupling in Shape Memory Alloy Integrated Fiber Rubber Composites. In Proceedings of the 9th ECCOMAS Thematic Conference on the Mechanical Response of Composites (COMPOSITES 2023), Trapani, Italy, 12–14 September 2023. [Google Scholar]
- Endesfelder, A.; Annadata, A.R.; Wang, Z.; Koenigsdorff, M.; Modler, N.; Cherif, C.; Zimmermann, M. Bewegungsanalyse von interaktiven Elastomer-Verbunden mittels Multi-Sensor-Kamerasystem. In Proceedings of the Tagungsmanuskript Werkstoffprüfung 2023: Werkstoffe und Bauteile auf dem Prüfstand, Berlin, Germany, 23–24 November 2023. [Google Scholar]
- Carl Zeiss GOM Metrology GmbH. Available online: http://www.gom.com/de-de/themen/aramis-multi-sensor-dic-systeme (accessed on 1 July 2024).





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Endesfelder, A.; Annadata, A.R.; Acevedo-Velazquez, A.I.; Koenigsdorff, M.; Gerlach, G.; Röbenack, K.; Cherif, C.; Zimmermann, M. Deflection and Performance Analysis of Shape Memory Alloy-Driven Fiber–Elastomer Composites with Anisotropic Structure. Materials 2024, 17, 4855. https://doi.org/10.3390/ma17194855
Endesfelder A, Annadata AR, Acevedo-Velazquez AI, Koenigsdorff M, Gerlach G, Röbenack K, Cherif C, Zimmermann M. Deflection and Performance Analysis of Shape Memory Alloy-Driven Fiber–Elastomer Composites with Anisotropic Structure. Materials. 2024; 17(19):4855. https://doi.org/10.3390/ma17194855
Chicago/Turabian StyleEndesfelder, Anett, Achyuth Ram Annadata, Aline Iobana Acevedo-Velazquez, Markus Koenigsdorff, Gerald Gerlach, Klaus Röbenack, Chokri Cherif, and Martina Zimmermann. 2024. "Deflection and Performance Analysis of Shape Memory Alloy-Driven Fiber–Elastomer Composites with Anisotropic Structure" Materials 17, no. 19: 4855. https://doi.org/10.3390/ma17194855