


Comparison of Cut-to-Length Harvesting Methods in Tree Plantations in Brazil



Abstract
1. Introduction
1.1. Background
1.2. Timber-Harvesting Productivity Studies on Eucalyptus Plantations
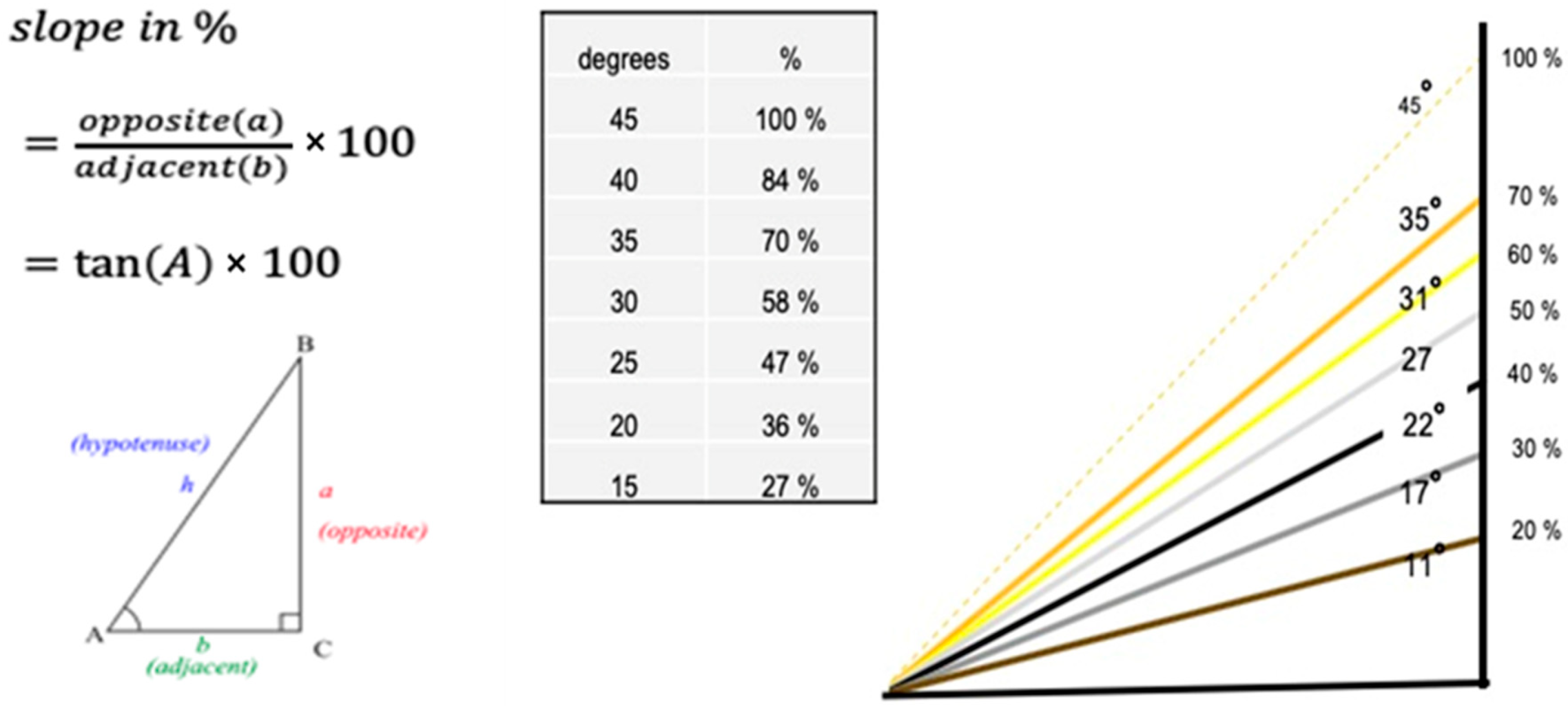
1.3. Harvesting on Sloping Terrain Forests
1.4. Aims of Study
2. Material and Methods
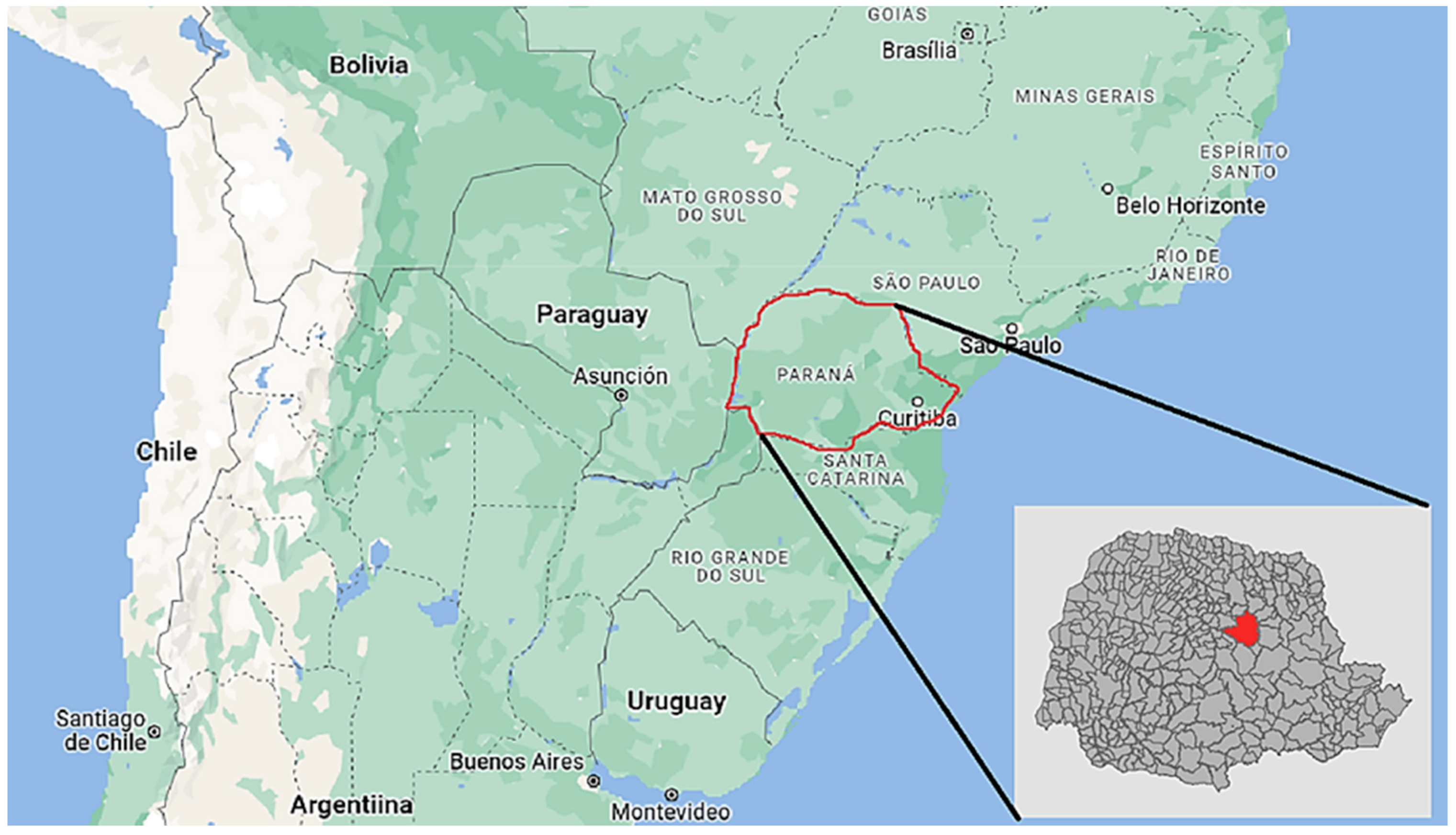
2.1. Study Area and Material
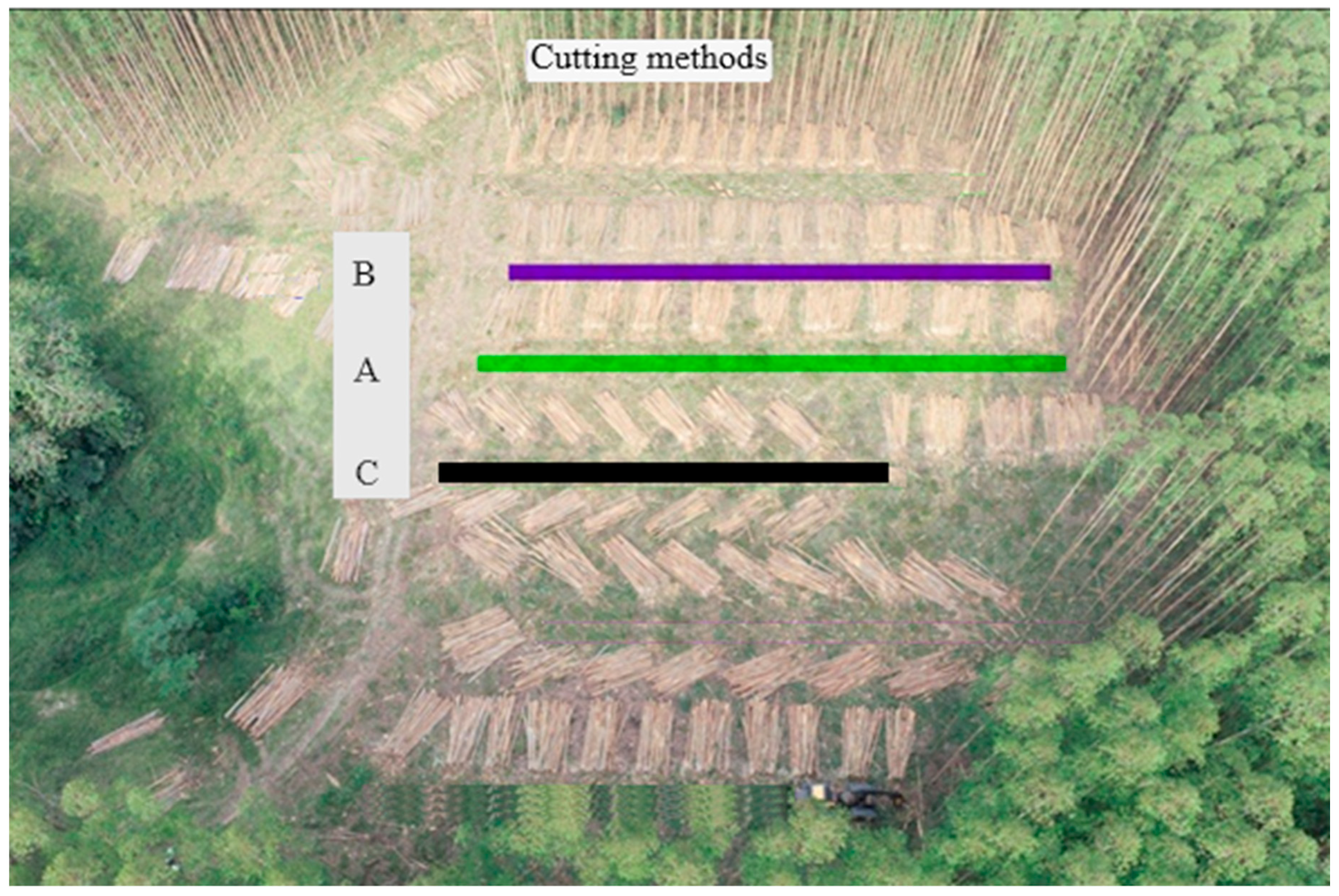
2.2. Cutting and Forwarding Methods in Harvesting
2.3. Data Analysis
3. Results
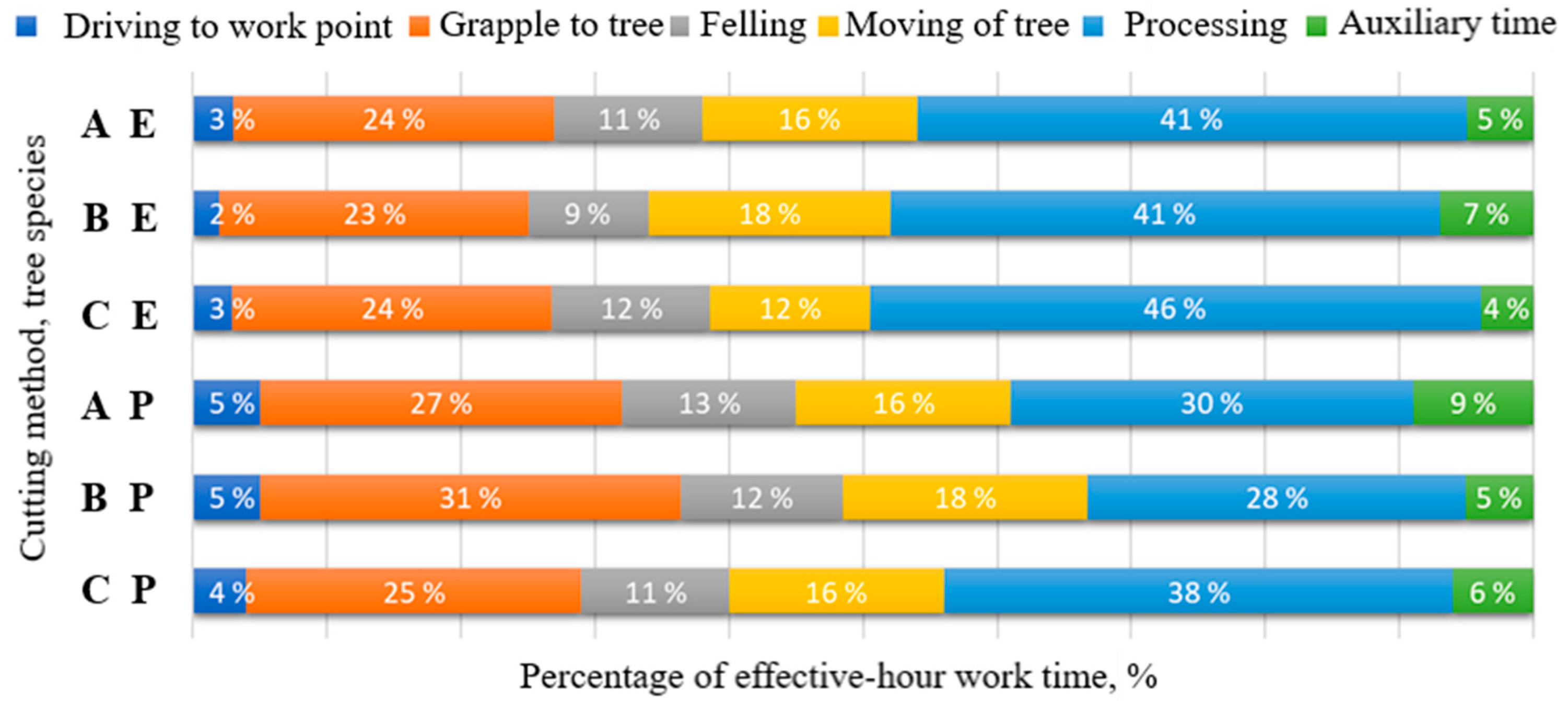
3.1. Time Consumption of Cutting Cycles
3.2. Time Consumption Analysis of Loading Cycle of Forwarder
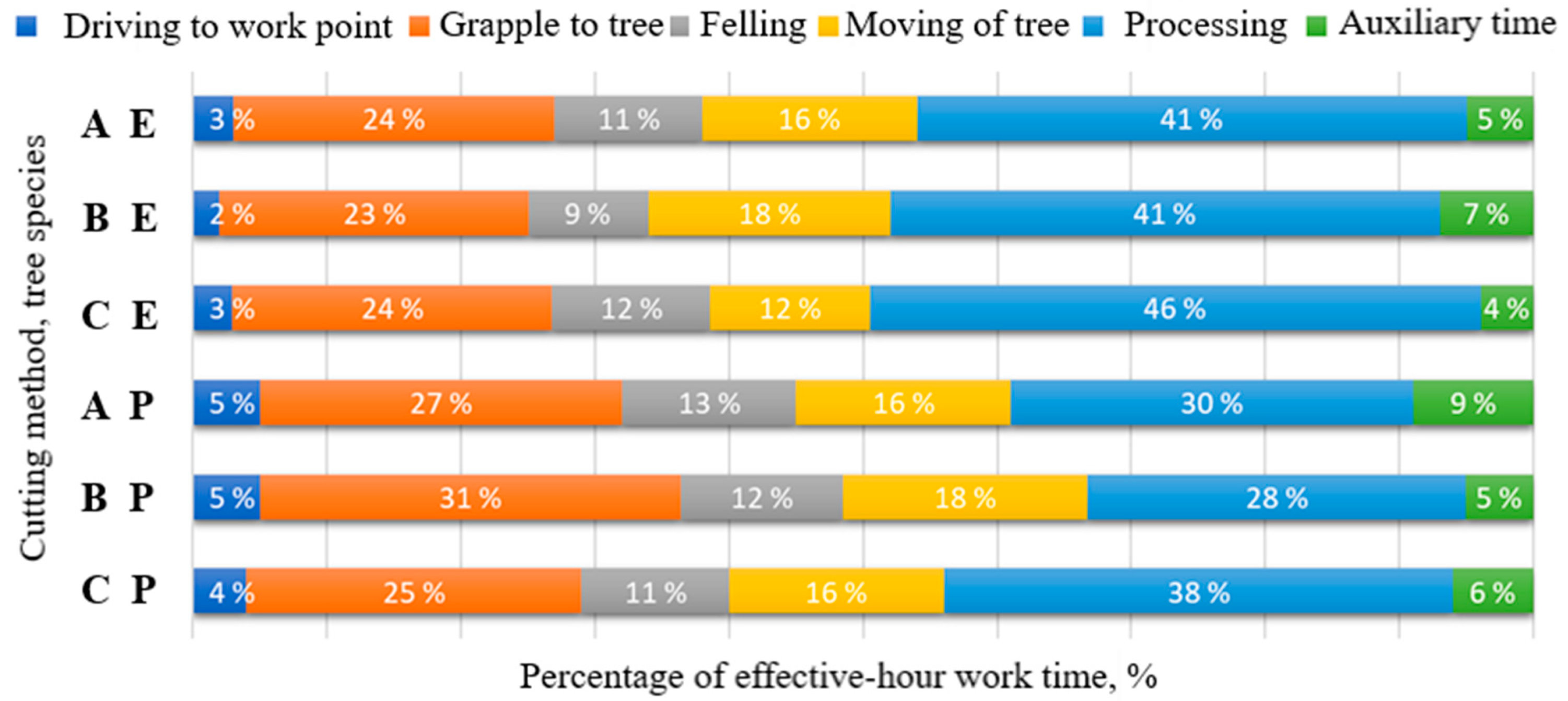
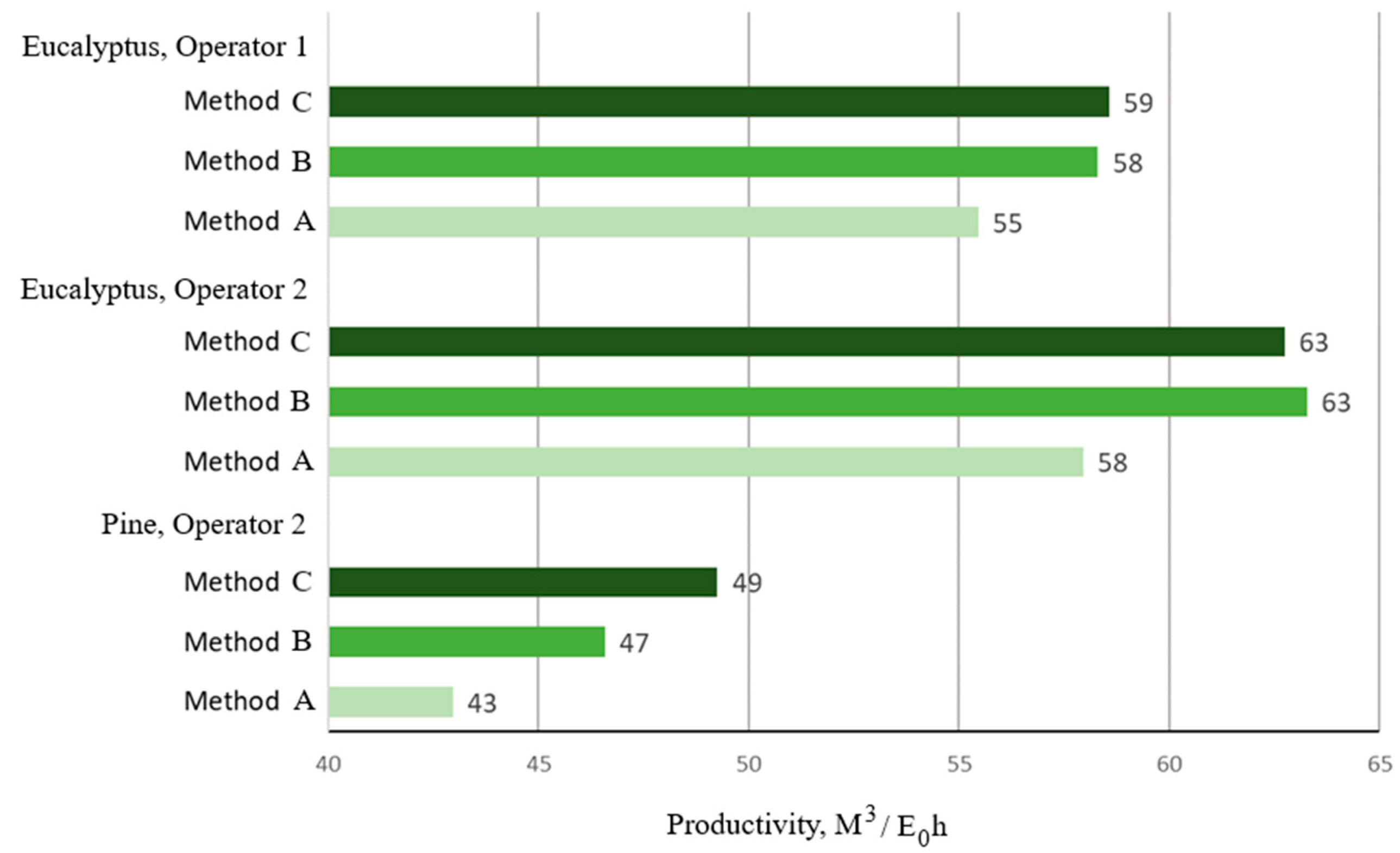
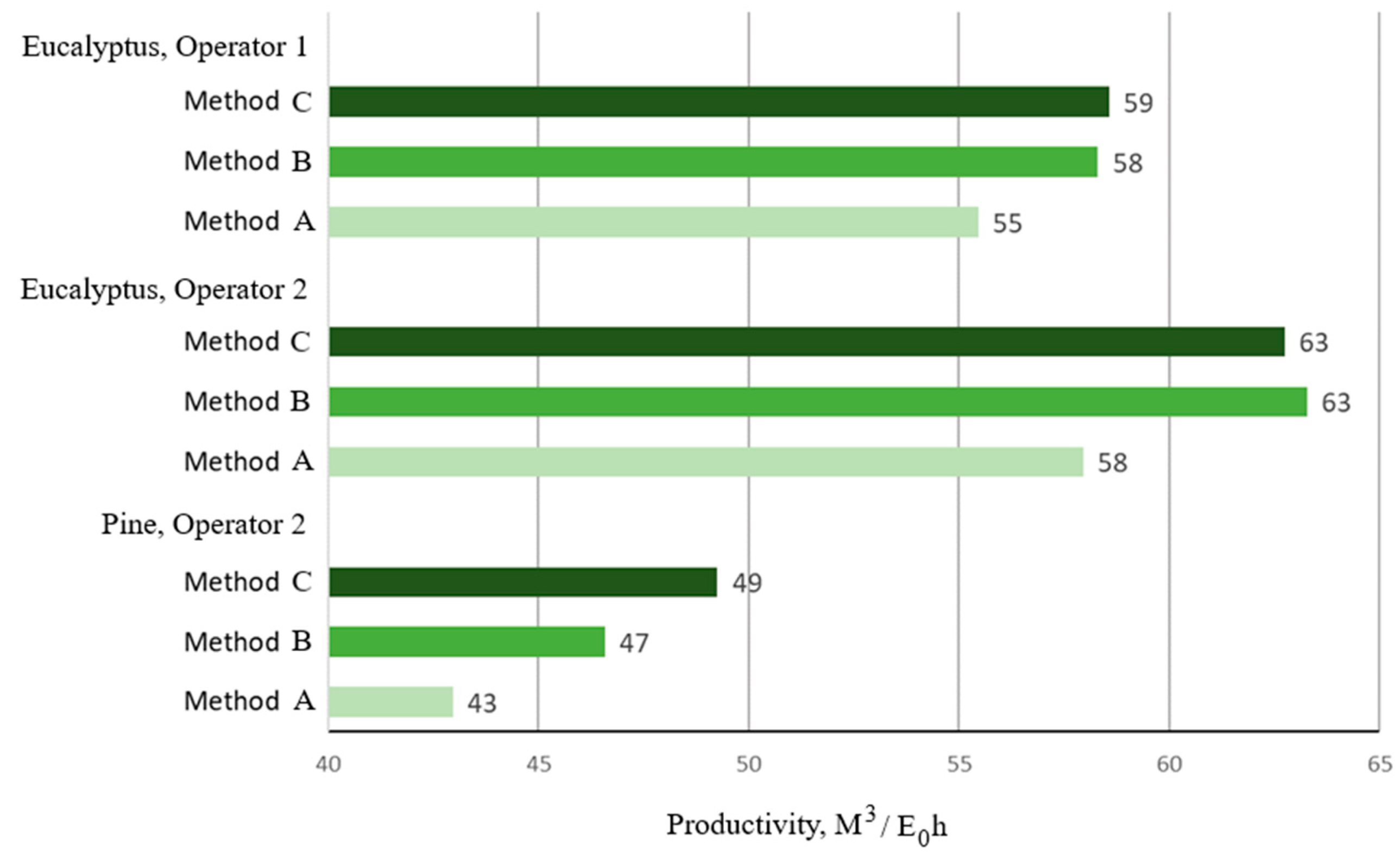
3.3. Effective Hour Productivity of Cutting Methods on Flat Terrain
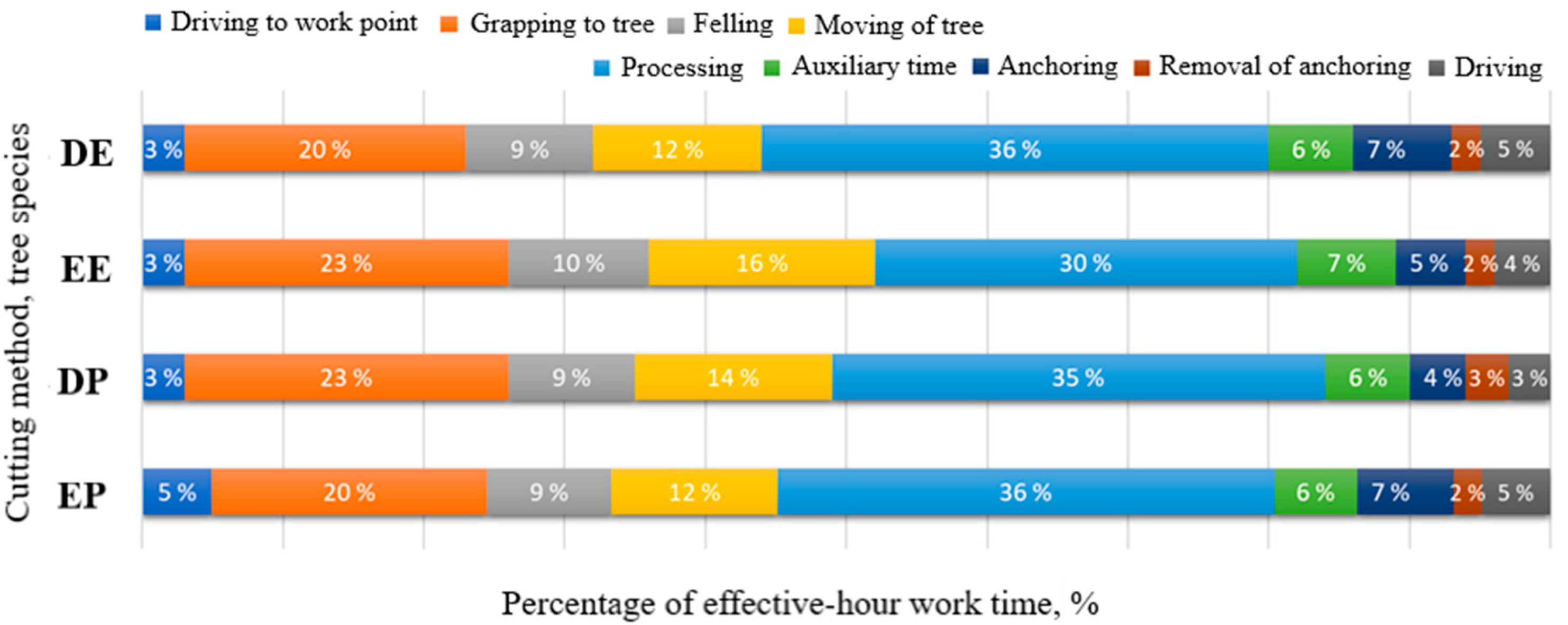
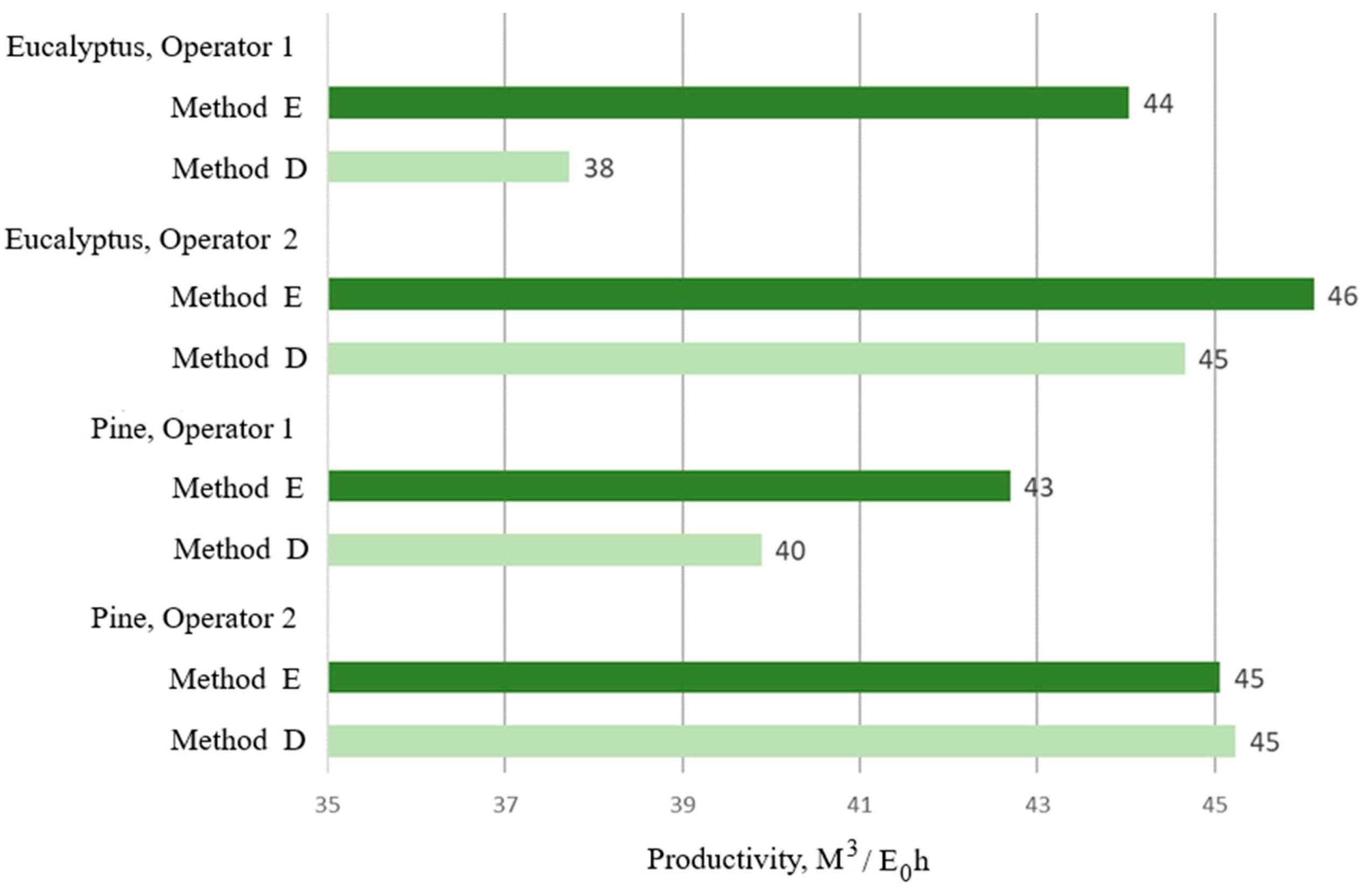
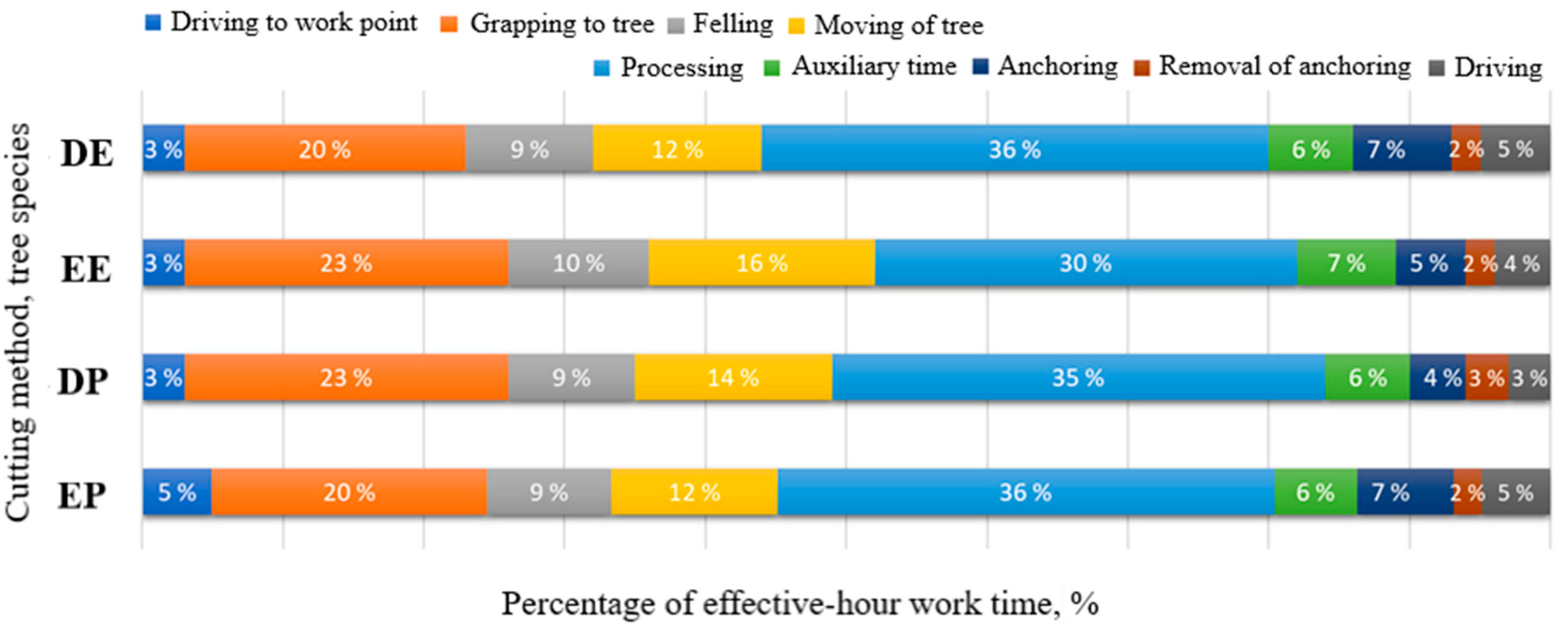
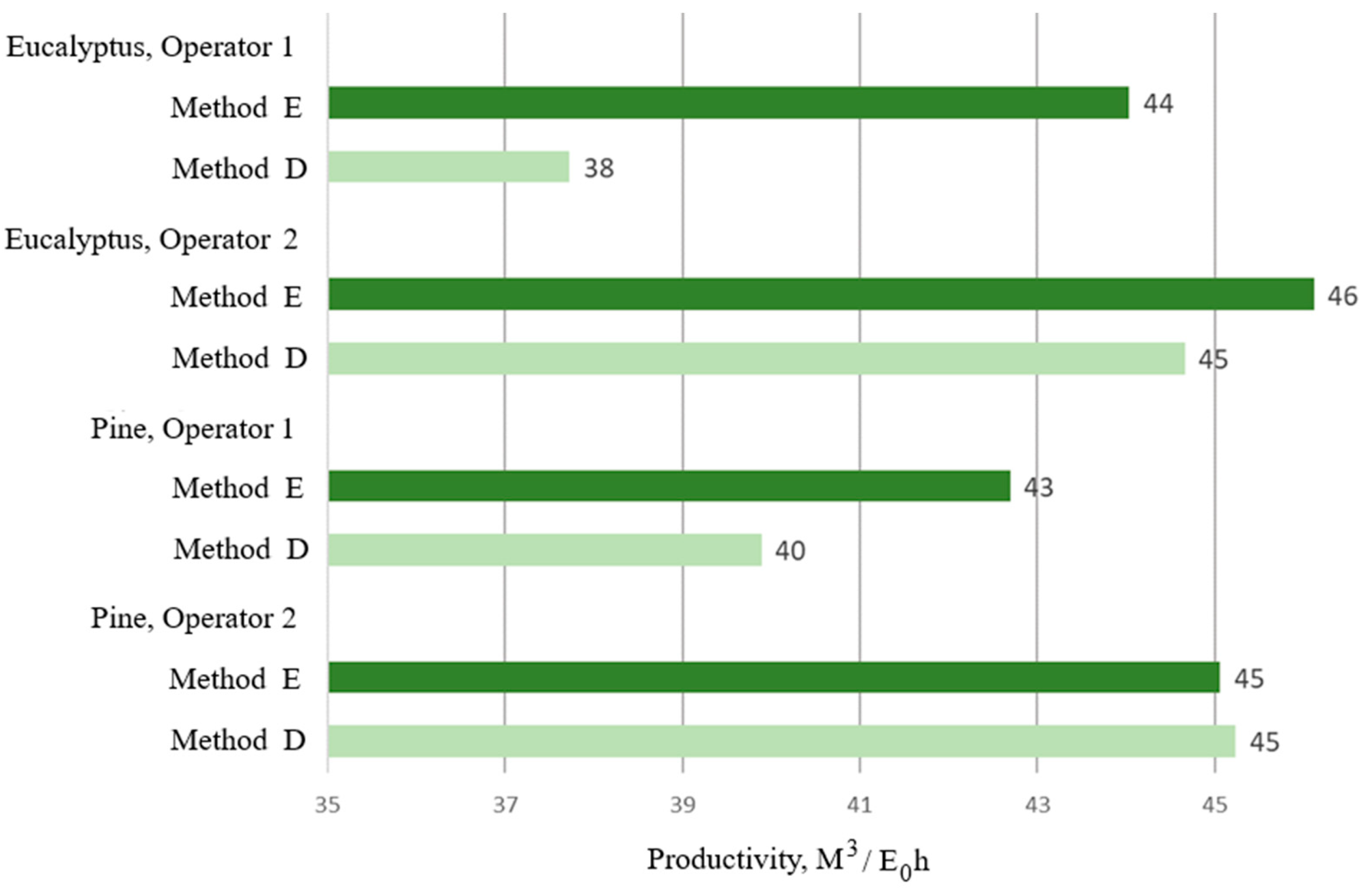
3.4. Effective Hour Productivity of Cutting Methods with Traction Assistance
3.5. Productivity Analysis of Cutting Cycles by Statistical Tests
4. Discussion
4.1. Productivity Comparison of Cut-to-Length Harvesting Methods
4.2. Productivity Comparison between Flat and Sloping Terrains
4.3. Validity of Data and Methods
4.4. Future Studies
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lundbäck, M.; Häggström, C.; Nordfjell, T. Worldwide trends in methods for harvesting and extracting industrial roundwood. Int. J. For. Eng. 2021, 32, 202–215. [Google Scholar] [CrossRef]
- Spinelli, R.; Owende, P.; Ward, S. Productivity and cost of CTL harvesting of Eucalyptus globulus stands using excavator-based harvesters. For. Prod. J. 2002, 52, 67–77. [Google Scholar]
- Palander, T.; Bergroth, J.; Kärhä, K. Excavator technology for increasing the efficiency of energy wood and pulp wood harvesting. Biomass Bioenergy 2012, 40, 120–126. [Google Scholar] [CrossRef]
- Ackerman, P.; Martin, C.; Brewer, J.; Ackerman, S. Effect of slope on productivity and cost of Eucalyptus pulpwood harvesting using single-grip purpose-built and excavator-based harvesters. Int. J. For. Eng. 2018, 29, 74–82. [Google Scholar] [CrossRef]
- Anon 2023a. Ponsse. The Cut-to-Length Method. Available online: https://www.ponsse.com/en/cut-to-length (accessed on 5 April 2024).
- Anon 2023b. John Deere Worldwide. Available online: https://www.deere.com/assets/pdfs/common/our-company/about/jd-world-locations-8-27-20.pdf (accessed on 5 April 2024).
- Eriksson, M.; Lindroos, O. Productivity of harvesters and forwarders in CTL operations in northern Sweden based on large follow-up datasets. Int. J. For. Eng. 2014, 25, 179–200. [Google Scholar] [CrossRef]
- Kuuluvainen, T.; Grenfell, R. Natural disturbance emulation in boreal forest ecosystem management—Theories, strategies, and a comparison with conventional even-aged management. Can. J. For. Res. 2012, 42, 1185–1203. [Google Scholar] [CrossRef]
- Grönlund, Ö.; Erlandsson, E.; Djupström, L.B.; Bergström, D.; Eliasson, L. Nature conservation management in voluntary set-aside forests in Sweden: Practices, incentives and barriers. Scand. J. For. Res. 2020, 35, 96–107. [Google Scholar] [CrossRef]
- Fernandez-Lacruz, F.; Grönlund, Ö.; Johannesson, T.; Djupström, L.B.; Söderberg, J.; Eliasson, L. Harvester time consumption in nature conservation management operations. Int. J. For. Eng. 2023, 34, 112–116. [Google Scholar] [CrossRef]
- McEwan, A.; Marchi, E.; Spinelli, R.; Brink, M. Past, present and future of industrial plantation forestry and implication on future timber harvesting technology. J. For. Res. 2020, 31, 339–351. [Google Scholar] [CrossRef]
- Zhang, F.; Johnson, D.M.; Wang, J.; Yu, C. Cost, energy use and ghg emissions for forest biomass harvesting operations. Energy 2016, 114, 1053–1062. [Google Scholar] [CrossRef]
- Adebayo, A.; Han, H.S.; Johnson, L. Productivity and cost of cut-to-length and whole-tree harvesting in a mixed-conifer stand. For. Prod. J. 2007, 57, 59–69. [Google Scholar]
- Fuentealba, S.; Pradenas, L.; Linfati, R.; Ferland, J.A. Forest harvest and sawmills: An integrated tactical planning model. Comput. Electron. Agric. 2019, 156, 275–281. [Google Scholar] [CrossRef]
- Labelle, E.R.; Lemmer, K.J. Selected Environmental Impacts of Forest Harvesting Operations with Varying Degree of Mechanization. Croat. J. For. Eng. 2017, 40, 239–257. [Google Scholar] [CrossRef]
- Garren, A.M.; Bolding, M.C.; Aust, W.M.; Moura, A.C.; Barrett, S.M. Soil disturbance effects from tethered forwarding on steep slopes in Brazilian eucalyptus plantations. Forests 2019, 10, 721. [Google Scholar] [CrossRef]
- Labelle, E.R.; Hansson, L.; Högbom, L.; Jourgholami, M.; Laschi, A. Strategies to Mitigate the Effects of Soil Physical Disturbances Caused by Forest Machinery: A Comprehensive Review. Curr. For. Rep. 2022, 8, 20–37. [Google Scholar] [CrossRef]
- Seixas, F.; Batista, J. Technical and economical comparison between wheel harvesters and excavators. Sci. For. 2014, 24, 185–191. [Google Scholar]
- Simoes, D.; Fenner, P.T. Influence of relief in productivity and costs of harvester. Sci. For. 2010, 38, 107–114. [Google Scholar]
- Da Silva Leite, E.; Minette, L.J.; Fernandes, H.C.; de Souza, A.P.; do Amaral, E.J.; das Graça Lacerda, E. Desempenho do harvester na colheita de eucalipto em diferentes espaçamentos e declividades (Harvester performance on eucalyptus crops in different spacing and slopes). Rev. Arvore. 2014, 38, 1–7. [Google Scholar]
- Norihiro, J.; Ackerman, P.; Spong, B.D.; Längin, D. Productivity Model for Cut-to-Length Harvester Operation in South African Eucalyptus Pulpwood Plantations. Croat. J. For. Eng. 2018, 39, 1–13. [Google Scholar]
- Hartsough, B.; Cooper, D. Cut-to-length harvesting of short-rotation Eucalyptus. For. Prod. J. 1999, 49, 69–75. [Google Scholar]
- Strandgard, M.; Mitchell, R.; Wiedemann, J. Comparison of Productivity, Cost and Chip Quality of Four Balanced Harvest Systems Operating in a Eucalyptus globulus Plantation in Western Australia. Croat. J. For. Eng. 2019, 40, 39–48. [Google Scholar]
- Ramantswana, M.; McEwan, A.; Steenkamp, J. A comparison between excavator-based harvester productivity in coppiced and planted Eucalyptus grandis compartments in KwaZulu-Natal, South Africa. South. For. A J. For. Sci. 2013, 75, 239–246. [Google Scholar] [CrossRef]
- McEwan, A.; Magagnotti, N.; Spinelli, R. The effects of number of stems per stool on cutting productivity in coppiced Eucalyptus plantations. Silva Fenn. 2016, 50, 1448. [Google Scholar] [CrossRef]
- Strandgard, M.; Mitchell, R.; Acuna, M. General productivity model for single grip harvesters in Australian eucalypt plantations. Aust. For. 2016, 79, 108–113. [Google Scholar] [CrossRef]
- Tarnowsky, C.; Schneider, P.; Machado, C. Productivity and costs of processor working in stands of Eucalyptus grandis. Sci. For. 1999, 2, 103–111. [Google Scholar]
- Martins, R.J.; Seixas, F.; Stape, J.L. Technical and economical evaluation of a harvester, working under different spacing and planting arrangement conditions in eucalypts plantations. Sci. For. 2009, 37, 253–263. [Google Scholar]
- Ackerman, P.; Williams, C.; Ackerman, S.; Nati, C. Diesel Consumption and Carbon Balance in South African Pine Clear-Felling CTL Operations: A Preliminary Case Study. Croat. J. For. Eng. 2017, 38, 65–72. [Google Scholar]
- Brandtner, N. Produktivitätsevaluierung des Seilgestützten Harvesters John Deere 1170E. Master’s Thesis, University of Natural Resources and Life Sciences, Vienna, Austria, 2018; 49p. [Google Scholar]
- Holzfeind, T.; Stampfer, K.; Holzleitner, F. Productivity, setup time and costs of a winch-assisted forwarder. J. For. Res. 2018, 23, 196–203. [Google Scholar] [CrossRef]
- Strimbu, V.; Boswell, B. Adverse Skidding Using a Tigercat 635E Assisted by a T-Winch; FPInnovations: Pointe-Claire, QC, Canada, 2018. [Google Scholar]
- Garland, J.; Belart, F.; Crawford, R.; Chung, W.; Cushing, T.; Fitzgerald, S. Safety in steep slope logging operations. J. Agromed. 2019, 24, 138–145. [Google Scholar] [CrossRef]
- Holzfeind, T.; Visser, R.; Chung, W.; Holzleitner, F.; Erbe, G. Development and Benefits of Winch-Assist Harvesting. Curr. For. Rep. 2020, 6, 201–209. [Google Scholar] [CrossRef]
- Anon 2023c. Ponsse Synchrowinch. Available online: https://www.ponsse.com/synchrowinch#/ (accessed on 5 April 2024).
- Ovaskainen, H. Timber Harvester Operators’ Working Technique in First Thinning and the Importance of Cognitive Abilities on Work Productivity; Monograph no. 79 in Dissertationes Forestales; University of Eastern Finland: Joensuu, Finland, 2009; 62p. [Google Scholar]
- Niebel, B.W. Motion and Time Study; Irwin: Homewood, IL, USA, 1993; 850p. [Google Scholar]
- Hollander, M.; Wolfe, D.A. Nonparametric Statistical Methods; John Wiley and Sons: New York, NY, USA, 1973. [Google Scholar]
- Spinelli, R.; Hartsough, B.; Magagnotti, N. Productivity standards for harvesters and processors in Italy. For. Prod. J. 2010, 60, 226–235. [Google Scholar] [CrossRef]
- Petitmermet, J.; Sessions, J.; Bailey, J.; Zamora-Cristales, R. Cost and productivity of tethered cut-to-length Systems in a dry-Forest Fuel-Reduction Treatment: A case study. For. Sci. 2019, 65, 581–592. [Google Scholar] [CrossRef]
- Green, P.; Chung, W.; Leshchinsky, B.; Belart, F.; Sessions, J.; Fitzgerald, S. Insight into the productivity, cost and soil impacts of cable assisted harvester-forwarder thinning in Western Oregon. For. Sci. 2019, 66, 82–96. [Google Scholar] [CrossRef]
- Harstela, P. Work Studies in Forestry; Silva Carelica 18; University of Joensuu, Faculty of Forestry: Joensuu, Finland, 1991; 41p. [Google Scholar]
- Nuutinen, Y. Possibilities to Use Automatic and Manual Timing in Time Studies on Harvester Operations; Monograph No. 156 in Dissertationes Forestales; University of Eastern Finland: Joensuu, Finland, 2013; 68p. [Google Scholar]
- Palander, T.; Nuutinen, Y.; Kariniemi, A.; Väätäinen, K. Automatic time study method for recording work phase times of timber harvesting. For. Sci. 2013, 59, 472–483. [Google Scholar] [CrossRef]
- Olivera, A.; Visser, R.; Acuna, M.; Morgenroth, J. Automatic GNSS-enabled harvester data collection as a tool to evaluate factors affecting harvester productivity in a Eucalyptus spp. harvesting operation in Uruguay. Int. J. For. Eng. 2016, 27, 15–28. [Google Scholar] [CrossRef]
- Nuutinen, Y.; Väätäinen, K.; Heinonen, J.; Asikainen, A.; Röser, D. The Accuracy of Manually Recorded Time Study Data for Harvester Operation Shown via Simulator Screen. Silva Fenn. 2008, 42, 63–72. [Google Scholar] [CrossRef]
- Palander, T.; Ovaskainen, H.; Tikkanen, L. An Adaptive Work Study Method for Identifying the Human Factors that Influence the Performance of a Human-Machine System. For. Sci. 2012, 58, 377–389. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors of Study | Year | Harvester Model | Species | Country | Tree Size (m3) | Productivity (m3/h) |
|---|---|---|---|---|---|---|
| Spinelli et al. [2] | 2002 | EH | Eucalyptus spp. | Spain, Portugal | 0.11–0.26 | 5–14 |
| Norihiro et al. [21] | 2018 | EH | Eucalyptus spp. | South Africa | 0.12–0.38 | 13.8–27.5 |
| Ramantswana et al. [24] | 2013 | EH | Eucalyptus spp. | South Africa | 0.21 | 16.1 |
| McEwan et al. [25] | 2016 | EH | Eucalyptus spp. | South Africa | 0.47 | 24.8 |
| Ackerman et al. [29] | 2017 | EH | Pinus spp. | South Africa | 1.05 | 54.13 |
| Martins et al. [28] | 2009 | WH | Eucalyptus spp. | Brazil | 0.25 | 17 |
| Seixas and Batista [18] | 2014 | WH | Eucalyptus spp. | Brazil | 0.29 | 19.1 |
| Characteristic | Ponsse Ergo H7 C5 Harvester | Ponsse Elephant King Forwarder |
|---|---|---|
| Operating mass (with accessories), kg | 24,650 | 23,900 |
| Engine power, kW | 205 | 205 |
| Traction force, KN | 195 | 240 |
| Engine torque, rpm | 1100 | 1100 |
| Boom reach, m | 9.5 | 10.0 |
| Wheels, “ | 26.5 “ | 26.5 “ |
| Tracks | Yes | Yes |
| Year of manufacturing | 2016 | 2016 |
| Operating hours, h | 22,235 | 20,459 |
| Characteristic | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| The main tree species | Eucalyptus saligna | Pinus taeda | Eucalyptus saligna | Pinus taeda |
| Slope of terrain, % | 17.5 | 22.5 | 7.5 | 7.5 |
| Number of trees, trees/ha | 1650 | 1350 | 1650 | 1350 |
| DBH, mm | 184 | 205 | 178 | 210 |
| *) Tree’s stem length, m | 21.3 | 13.3 | 22.1 | 15.1 |
| Tree’s stem volume, m3 | 0.416 | 0.315 | 0.386 | 0.366 |
| Samples | 4 | 4 | 6 | 3 |
| Tree Species/ Operator | A | B | C |
|---|---|---|---|
| m3 | |||
| E1 | 0.414 | 0.319 | 0.436 |
| E2 | 0.413 | 0.418 | 0.432 |
| P2 | 0.290 | 0.287 | 0.351 |
| Terrain | Tree Species | Cutting Method | Forwarding Method | Traction Assistance | ||||
|---|---|---|---|---|---|---|---|---|
| Flat | Eucalyptus | A | B | C | AL | BL | CL | No |
| Flat | Pine | A | B | C | AL | BL | CL | No |
| Slope | Eucalyptus | D | E | - | DL | EL | Yes | |
| Slope | Pine | D | E | - | DL | EL | Yes | |
| Species, Operator | Flat Terrain | Sloping Terrain | |||||
|---|---|---|---|---|---|---|---|
| AL, s | BL, s | CL, s | K-W, p | DL, s | EL, s | M-W, p | |
| E1 | 18.6 | 17.9 | 17.7 | 0.638 | 18.2 | 20.8 | 0.013 * |
| E2 | 21.8 | 22.9 | 22.9 | 0.550 | 26.0 | 26.4 | 0.883 |
| P1 | 17.6 | 18.7 | 16.4 | 0.147 | - | 18.4 | - |
| P2 | 22.4 | 26.0 | 19.4 | 0.000 * | - | 22.7 | - |
| Species, Operator | Flat Terrain | Sloping Terrain | |||||
|---|---|---|---|---|---|---|---|
| A | B | C | K-W p | D | E | M-W p | |
| m3/E0h | m3/E0h | ||||||
| E1 | 58.1(24) | 64.8(27) | 62.1(24) | 0.149 | 46.1(25) | 53.8(27) | 0.030 * |
| E2 | 66.3(26) | 64.0(28) | 63.9(27) | 0.716 | 57.9(27) | 56.0(23) | 0.615 |
| P1 | - | - | - | - | 51.7(19) | 58.7(23) | 0.030 * |
| P2 | 49.3(23) | 53.6(25) | 53.8(23) | 0.730 | 55.1(24) | 57.7(25) | 0.325 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palander, T.; Pasi, A.; Laurèn, A.; Ovaskainen, H. Comparison of Cut-to-Length Harvesting Methods in Tree Plantations in Brazil. Forests 2024, 15, 666. https://doi.org/10.3390/f15040666
Palander T, Pasi A, Laurèn A, Ovaskainen H. Comparison of Cut-to-Length Harvesting Methods in Tree Plantations in Brazil. Forests. 2024; 15(4):666. https://doi.org/10.3390/f15040666
Chicago/Turabian StylePalander, Teijo, Antti Pasi, Annamari Laurèn, and Heikki Ovaskainen. 2024. "Comparison of Cut-to-Length Harvesting Methods in Tree Plantations in Brazil" Forests 15, no. 4: 666. https://doi.org/10.3390/f15040666
APA StylePalander, T., Pasi, A., Laurèn, A., & Ovaskainen, H. (2024). Comparison of Cut-to-Length Harvesting Methods in Tree Plantations in Brazil. Forests, 15(4), 666. https://doi.org/10.3390/f15040666