1. Introduction
Spongy moth (
Lymantria dispar dispar), native to Eurasia, is an invasive pest in North America, which was accidentally introduced in the 1860s in Massachusetts. In the more than 150 years spongy moth has been present in North America, tens of millions of hectares of forest have been defoliated during cyclical outbreak events with damage frequently manifesting as tree decline and mortality [
1,
2,
3,
4,
5,
6,
7]. While the outbreaks of forest insects and diseases are not novel, their extent and impact have increased to devastating proportions in recent decades. The caterpillars of this species can feed on a wide variety of plants but prefer oaks (
Quercus spp.) [
8,
9]. Tree decline and mortality related to spongy moth outbreaks can be exacerbated by compounding factors such as drought or unseasonably low temperatures [
8]. These factors occurred in concert between 2021 and 2023 in the northeastern United States [
10,
11]. In New Hampshire, large spongy moth outbreaks were observed for the first time in nearly 30 years beginning in 2021 and continuing through 2023 [
12]. In 2021 and 2022, over 20,000 hectares (ha) of spongy moth defoliation was mapped in New Hampshire (NH) by the NH Forest Health Bureau’s annual aerial forest survey flights [
12,
13,
14].
When the extent of the damage to NH oak forests became apparent in spring of 2023, foresters responsible for managing several thousand acres of oak-dominated forests in the heart of the spongy moth-defoliated area contacted the NH Forest Health Bureau. The foresters were seeking advice regarding the future prospect of declining trees and how this information might inform future management decisions. Specifically, the foresters were planning for an upcoming timber harvest to salvage dead and declining oaks. Foresters look to use silvicultural methods both as a treatment as well as a way to salvage standing dead and declining trees before their economic value is lost due to decay [
15,
16,
17,
18,
19]. Tree decomposition on the stump not only results in lost potential value of wood products, but it also transitions the forest from a carbon sink to a carbon source. Forest pests and diseases have been shown to reduce carbon sequestration [
20]. Overall, forest degradation is known to cause reduced timber production, limit biodiversity, and impair ecosystem function [
21,
22,
23]. Extensive tree mortality can also increase fire risk, negatively impact recreation, and affect local economies [
23]. The forests in New Hampshire and neighboring Vermont provide several billions of dollars in revenue annually, with much of the forested land being privately owned [
10,
21]. Forest management actions, such as thinning in affected oak stands, are expected to reduce subsequent mortality due to spongy moth caterpillar outbreaks [
7].
The aerial surveys conducted to map the statewide extent of oak decline are a widely adopted practice for attaining landscape level data on forest insect and disease impacts [
6,
24,
25] but are not designed for management-level evaluation of decline. Comprehensive, local-scale knowledge is needed by foresters and land managers to implement adaptive strategies. This can either be performed via traditional field surveys on foot, or, if the resources are available, using the following newer survey tool: Unpiloted Aerial Systems. Unpiloted Aerial Systems (UASs, UAVs, or drones) are frequently used in localized research-related surveys and employed as a tool for tree level mapping [
17,
26,
27,
28,
29]. However, commercial use of UASs in the natural resources industry are not yet widely adopted. Multispectral UAS sensor capabilities expand the depth of detail captured during surveys, especially in relation to vegetation health applications [
30,
31,
32,
33,
34,
35]. Different multispectral sensors are available for purchase, ranging in price, number of bands available, and frequencies collected. For smaller outfits with limited budgets, such as local governments or smaller businesses, tough decisions need to be made regarding resource allocation. Between training of staff, purchasing the UAS and sensor(s), establishing a ground control station, and purchasing the associated software needed for pre-processing and analysis, compromises need to be made for organizations to stay operational. UASs can range in price from a few hundred dollars to tens of thousands of dollars [
36,
37,
38,
39]. The selection of a comprehensive yet affordable image processing or photogrammetry software is also no easy task [
33,
40]. There are many open-source and commercial software applications available that are capable of performing some processing and analysis functions, but each requires a unique level of technical expertise [
41,
42].
In recent years, due to the rapid expansion of UAS applications, practitioners have begun to make comparisons between hardware and software choices as well as highlight the need for standardization and accessibility [
17,
32,
42,
43]. For example, in Changsalak and Tiansawat [
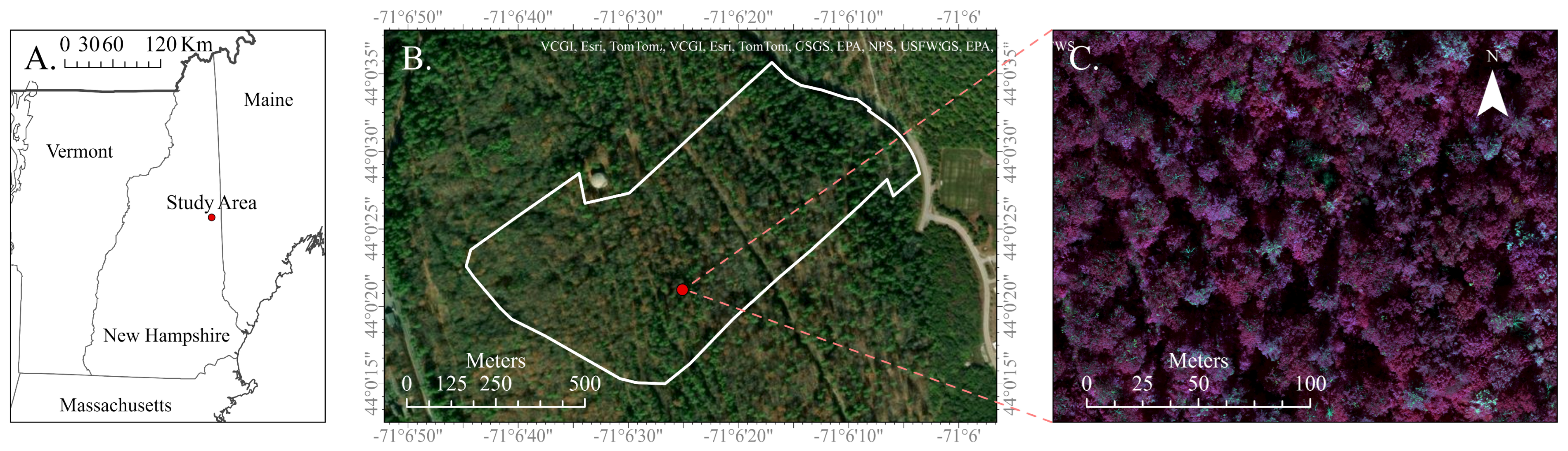
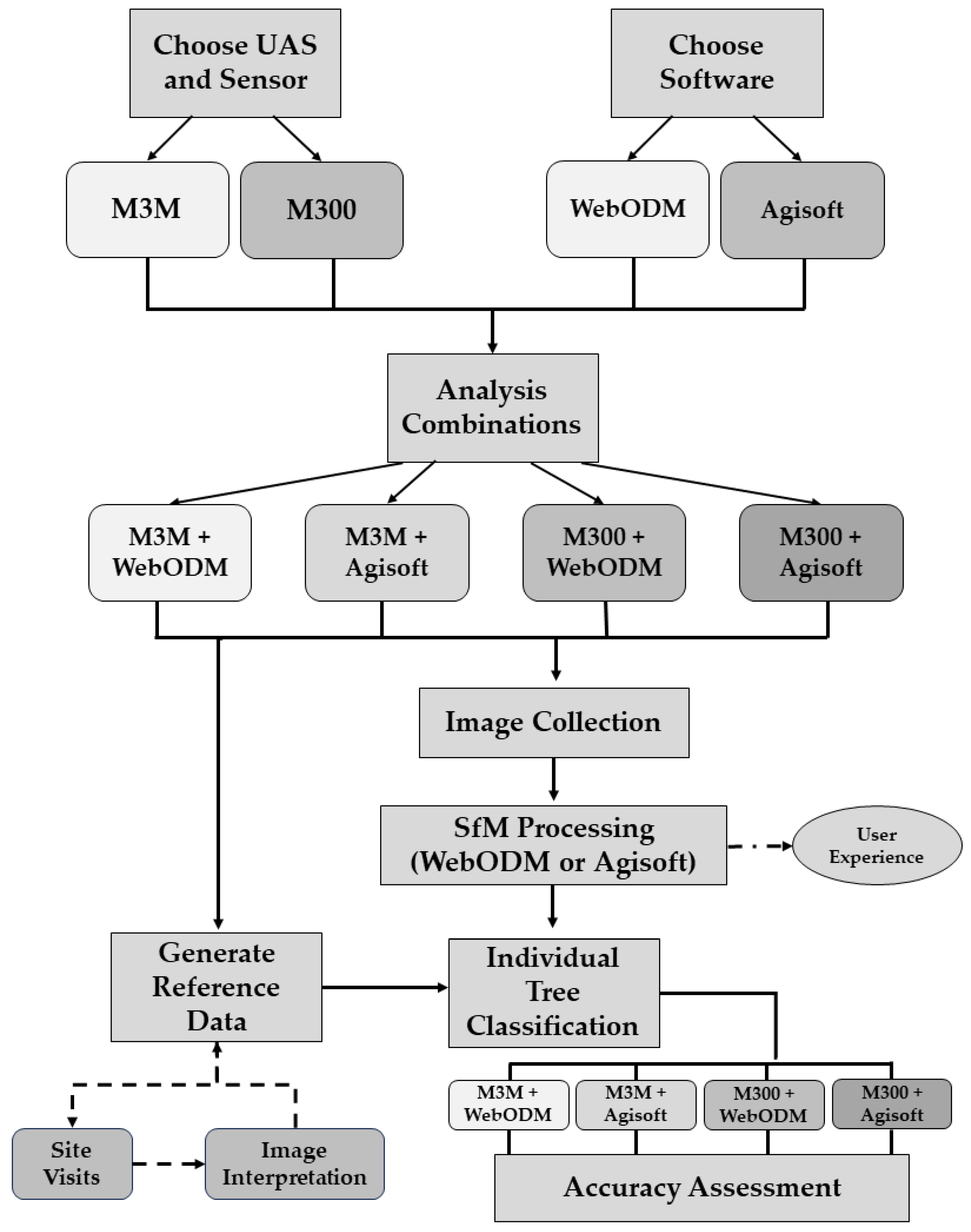
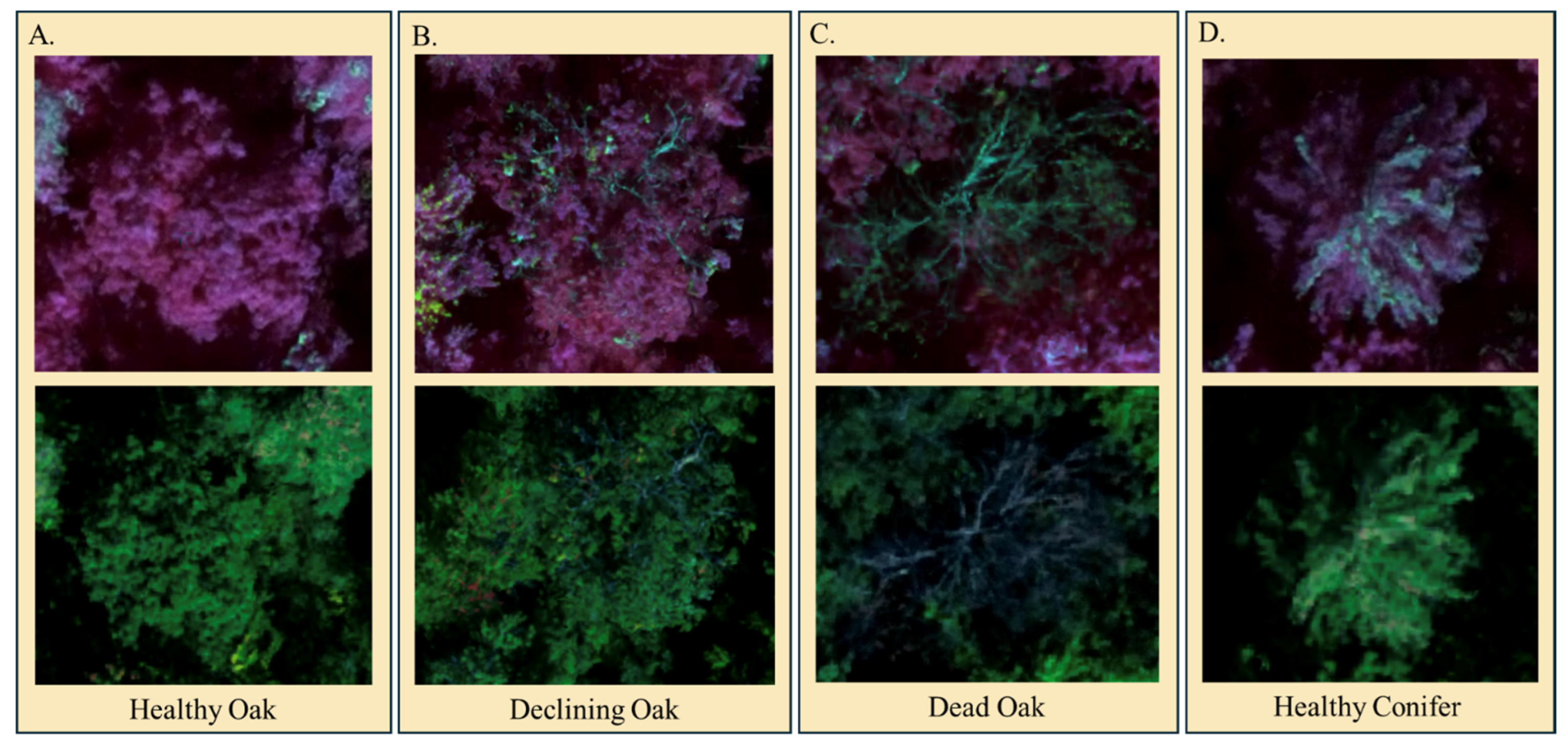
40], the authors tested WebODM against Pix4Dmapper (Pix4D S.A. Prilly, Switzerland) and determined that the results were similar but not equivalent. WebODM produced slightly higher levels of omission error for tree detections. The primary objective of this research is to evaluate the effectiveness of two UAS surveying approaches for classifying the health of individual oak trees following a spongy moth outbreak. To accomplish this, we quantified the differences in classification accuracy based on two tests. The first used different UAS sensors and the second used two different software capabilities: commercial software and open-source software (
Table 1). The forests surveyed were dominated by northern red oak (
Quercus rubra) and eastern white pine (
Pinus strobus). Oaks were divided into three health classes: healthy, declining, and dead. We also discuss important characteristics of our image processing experience using these hardware and software options. Based on these findings, stakeholders can make practical decisions related to resource allocation, accuracy, and technical complexity.
4. Discussion
The impact of spongy moth outbreaks on oak populations is widespread and has far-reaching consequences for forest resource health and management. Forest and land managers, including state agencies, work to minimize these ecological and economic impacts and build resiliency against future outbreaks [
9,
18,
19,
23], but often lack the tools and resources to adopt cutting-edge technologies to guide their decisions. UASs, and their associated image processing workflows, offer a way to bridge the gap between field observations and airborne or satellite-based observations, leading to more effective management efforts [
62,
65,
66]. UAS assessments of oak crown vigor, especially at fine scales, can also support silvicultural management efforts, given operational flexibility for timely and frequent flights of UASs compared to more traditional imagery platforms (i.e., planes and satellites), which deal with cloud cover, fuel costs, and other logistical challenges [
17,
18]. However, willingness to participate in new technologies are dampened without evidence that investments will be met with adequate returns. With multiple options out there for purchase and a range of daunting price tags, this analysis of how different UASs, and associated software, compare may assist smaller organizations in deciding what is best for their team [
17,
18]. Our objective was to compare the effectiveness of two UAS (different costs and different multispectral payloads) surveying approaches to quantify the differences in accuracy achieved for classifying individual oak tree health following a recent spongy moth outbreak. These surveying approaches utilized different pieces of hardware and software so that combinations of each type of hardware and software could be evaluated for cost and accuracy.
In comparing UAS hardware, M300 UAS paired with MicaSense Dual-MX 10-band sensor achieved the highest overall performance with an 89.5% classification accuracy when paired with commercial-grade Agisoft SfM software. M3M achieved its highest overall classification accuracy of 85.3% using WebODM open-source SfM. When using Agisoft, M3M achieved an average overall accuracy of 85.0%. This average overall accuracy increase of approximately 3.8% between hardware options (M300 vs. M3M) comes at the cost of a USD 27,700 price difference. The class of most interest to the foresters looking to conduct management operations, the ’Declining Oak‘ identification, achieved larger differences in user’s and producer’s accuracies between these two types of hardware. In our example error matrices, we saw an increase in user’s accuracy of 11.5% and an increase in producer’s accuracy of 4.8% when using the more expensive system. Secondly, in comparing UAS-SfM software choices, commercial-grade Agisoft SfM software performed 3.8% better overall when classifying the imagery captured using M300 and MicaSense sensor, but 0.3% lower when using M3M sensor. The most likely cause for the difference in performance when using both software and MicaSense sensor is the lack of radiometric calibration in WebODM. It is well documented that radiometric correction (i.e., pre-processing of remotely sensed imagery to more closely measure surface reflectance) is an essential process of digital image analysis [
17,
33,
67,
68,
69]. This slight increase (3.8%) in overall classification performance was made based on a USD 3500 investment in software.
Just looking at the results and costs, one might assume that there is no major difference between the kinds of software and hardware being compared, at least not thousands of dollars worth of an upgrade. However, when you look beyond the accuracies and dollar signs, there are few nuances worth mentioning. While processing the imagery from both UAS sensors in both software applications, notable differences in user experience were documented. From these notes, three major considerations stand out with respect to the choice between commercial or open-source software use. First, UAS-SfM processing took nearly 25 times as long using WebODM in comparison to Agisoft while both were set to a ‘High’ quality setting. On ‘Ultra-High’ (point cloud quality setting), WebODM took over 75 times longer than Agisoft and often failed before generating outputs. When switching to the ‘Fast Orthophoto’ setting in WebODM, which omitted point cloud and DEM creation, the processing times were much more similar. The lack of a 3D point cloud or DEM, however, removed a primary source of data for individual tree segmentation. Vacca [
50] also found that WebODM took longer to process than Agisoft, even on a small number of photos (i.e., small area). This investment in processing time could limit operational feasibility for teams attempting to complete surveys over large areas in a timely manner or those who wish to automate their processing workflow. A second major consideration is the lack of configuration for WebODM to process image composites with greater than five bands. While not as common, sensors with increased spectral resolution (number and width of bands) are currently available and may increase in availability in the coming years. This heightened spectral resolution is known to aid in various environmental applications, including forest health management [
31,
34,
67,
70,
71]. When working with these heightened spectral resolution sensors, WebODM may present some additional barriers. Lastly, open-source WebODM software does not currently support the integration of pre-flight radiometric processing or calibration panel recognition. This pre-processing step is an essential component of many digital image analysis workflows [
17,
68] and may have contributed to the lower overall classification accuracy when using MicaSense sensor in conjunction with WebODM. Deng et al. [
67] determined that the use of different UAS sensors and radiometric calibration methods could influence the accuracy of observed spectral reflectance values in a precision agriculture setting.
M3M is advertised to have an internal calibration panel and, therefore, was not manually calibrated in either WebODM or Agisoft during the processing stages. This could explain why the results produced by WebODM and Agisoft were so similar for M3M but varied more for M300. It is also worth mentioning that our results are the product of manually delineated tree crowns. The value of more expensive hardware and software might become more apparent if we were to utilize automation for individual tree segmentation, rather than manual, due to potentially improved point cloud generation and processing [
40,
48,
52]. From an applied perspective, crown delineation would need to be automated for efficiency of workflow and, therefore, 3D data would be instrumental.
The results of this study demonstrate that both UAS hardware and software options achieved an accuracy sufficient to inform fine-scale forest management operations. The overall classification accuracy for delineating three classes of oak health as well as conifer trees ranged from 85.0% (M3M and Agisoft) to 89.5% (M300 and Agisoft). The user’s and producer’s accuracies for this highest performing combination were 89.5% and 81.0% for Declining Oak. Among the most important features for all tests were NDVI, RVI, Green, and Red band products. Similar studies by Kanaskie et al. [
54] and Lopez et al. [
53] achieved forest health classification accuracies closer to 70%–80% using similar sensors and methods. Abdollahnejad and Panagiotidis [
72], achieved an 84.7% overall accuracy for assessing the health status of trees infested by bark beetles. These studies, among others, have found that spectral wavelengths and derivative bands created using Red and Green reflectance are important indicators of physiological stress [
26,
35,
54,
73,
74,
75].
As spongy moth outbreaks and other forest disturbances continue to impact global forests, it is imperative that novel remote-sensing applications offer ways to effectively and efficiently acquire spatially explicit information to support management decisions [
2,
76]. The kinds of hardware and software compared during this research represent an investment of hundreds to thousands of dollars as well as quantifiable differences in processing time, resources, and technical complexity. As more users continue to adopt these technologies, reliable evidence must be available to support their decisions on which kind of hardware and software best suits their individual needs.

 ,
, 

{kind=link}
{kind=link}
{kind=link}


