
An Improved LandTrendr Algorithm for Forest Disturbance Detection Using Optimized Temporal Trajectories of the Spectrum: A Case Study in Yunnan Province, China


Abstract
1. Introduction
2. Study Area and Datasets
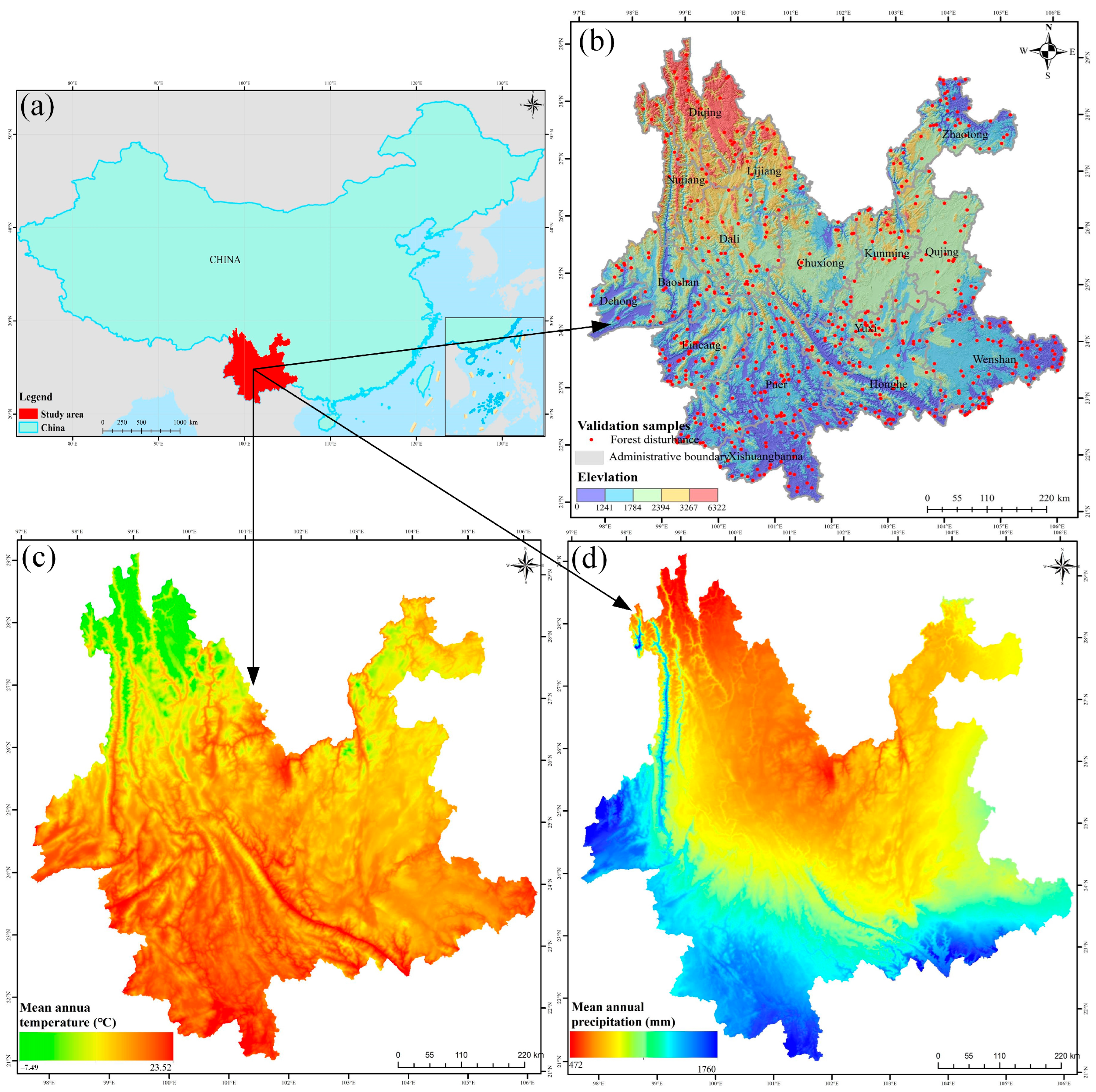
2.1. Study Area
2.2. Landsat Time-Series Data
2.3. Ancillary Data
2.4. Validation Samples
3. Methods
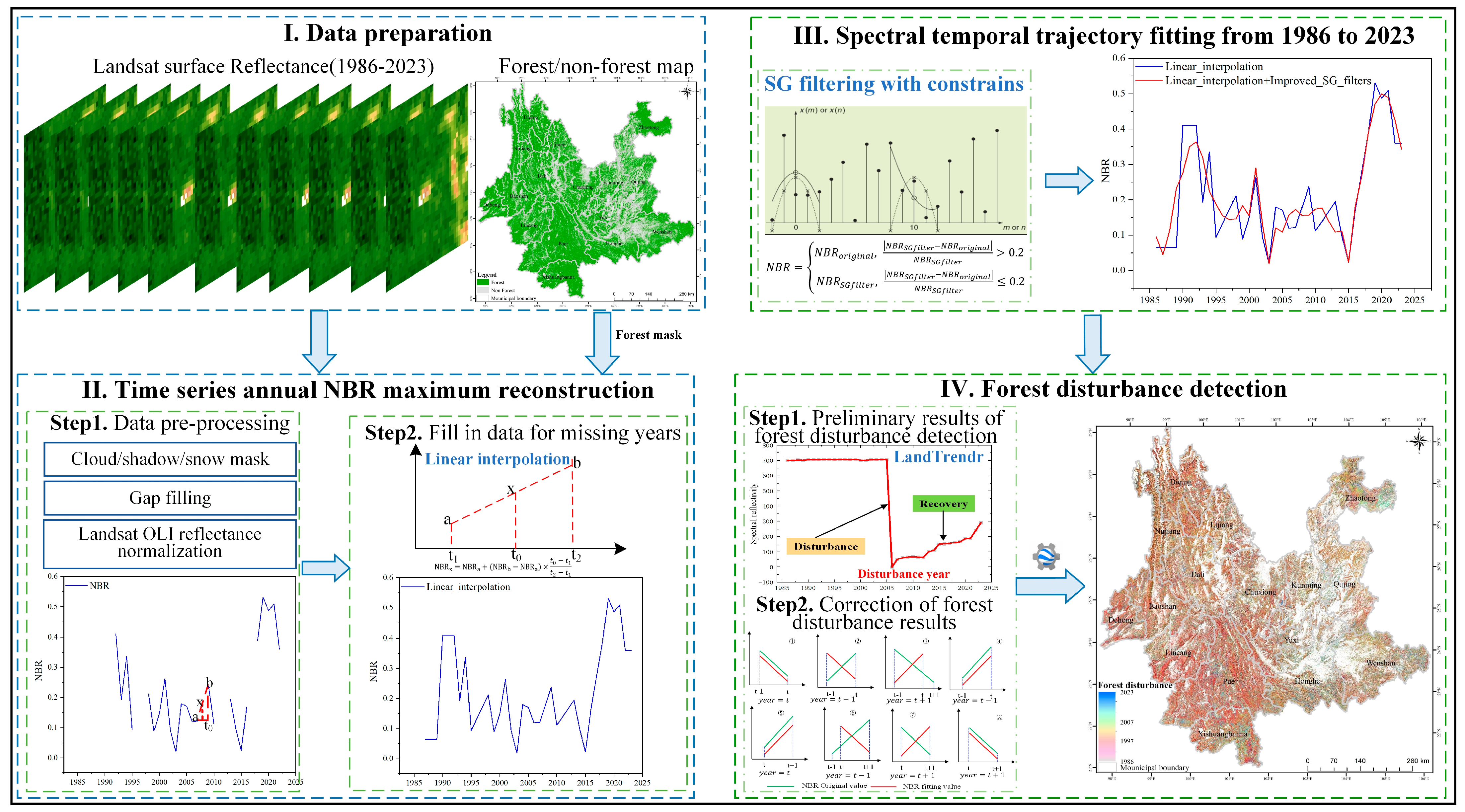
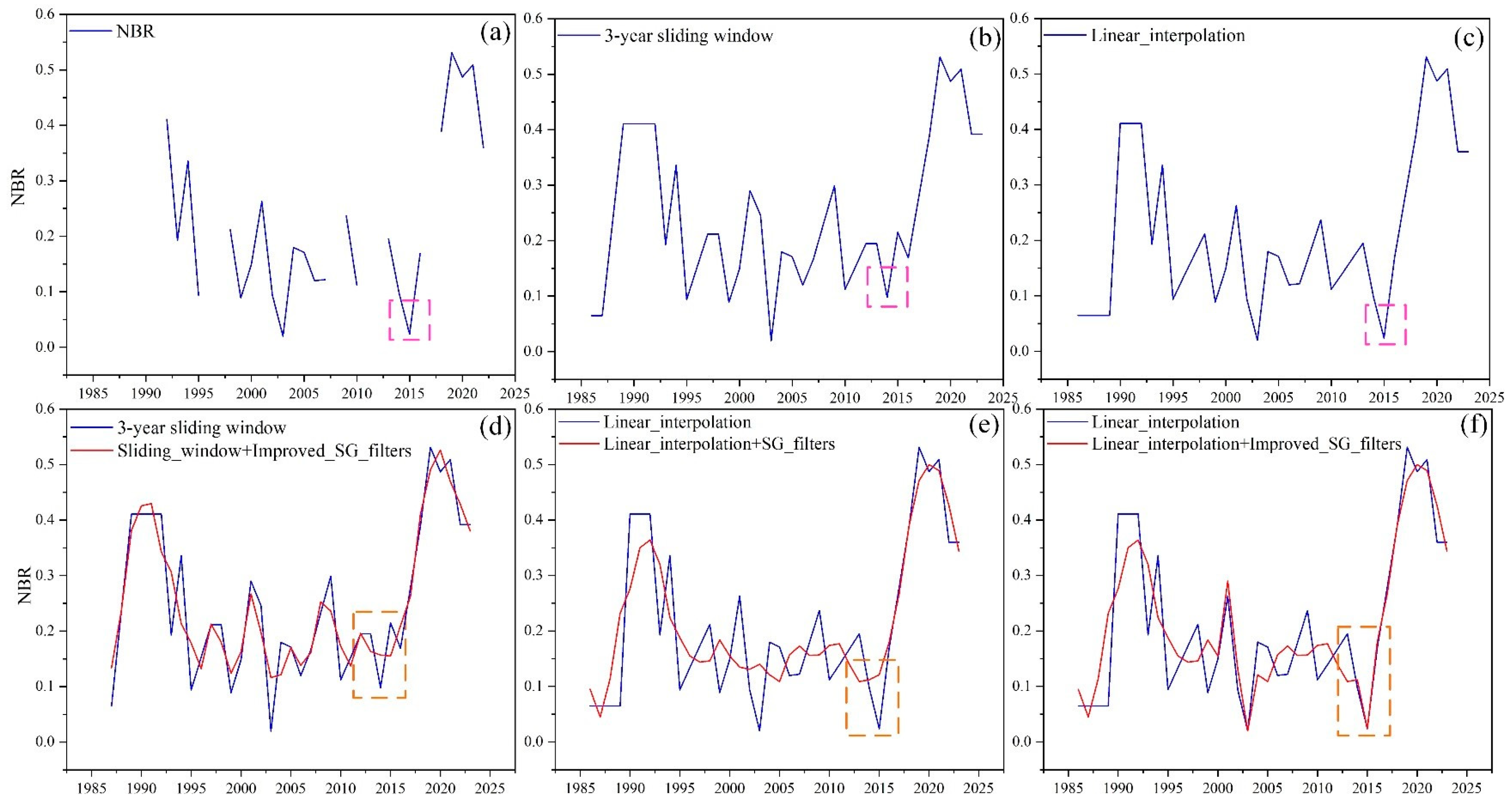
3.1. Reconstruction of High-Density Landsat Time-Series Data
3.2. Spectral Time-Series Trajectory Fitting
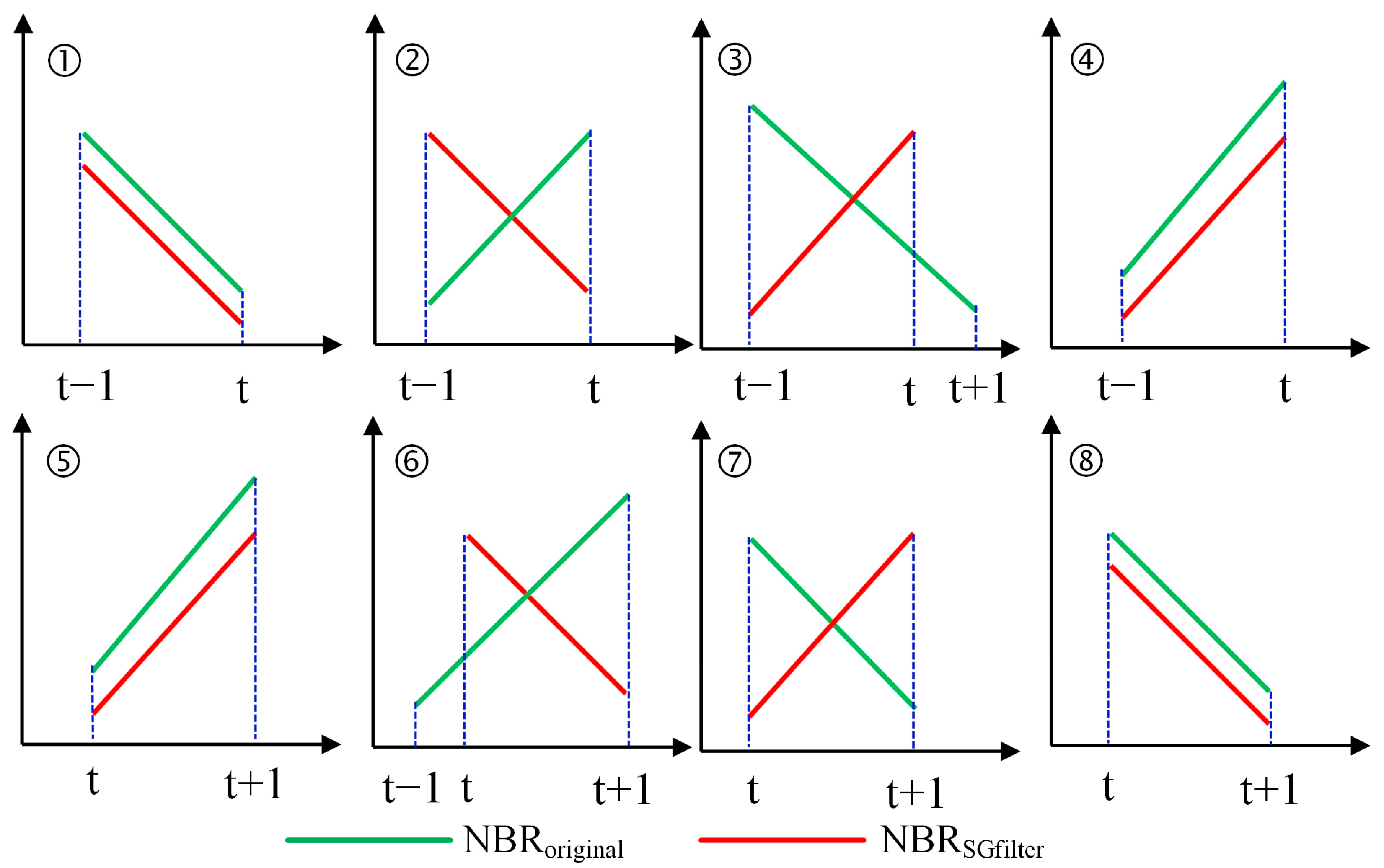
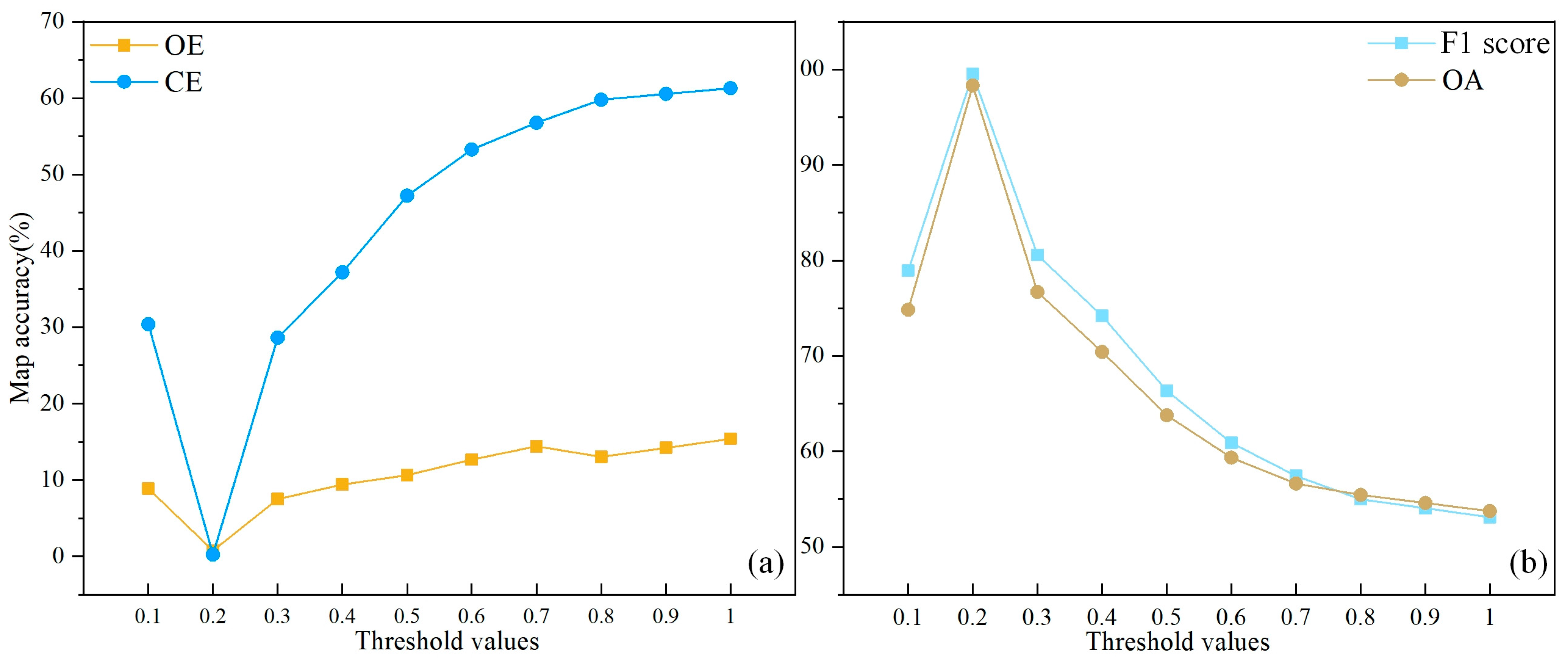
3.3. Forest Disturbance Detection
3.4. Accuracy Assessment
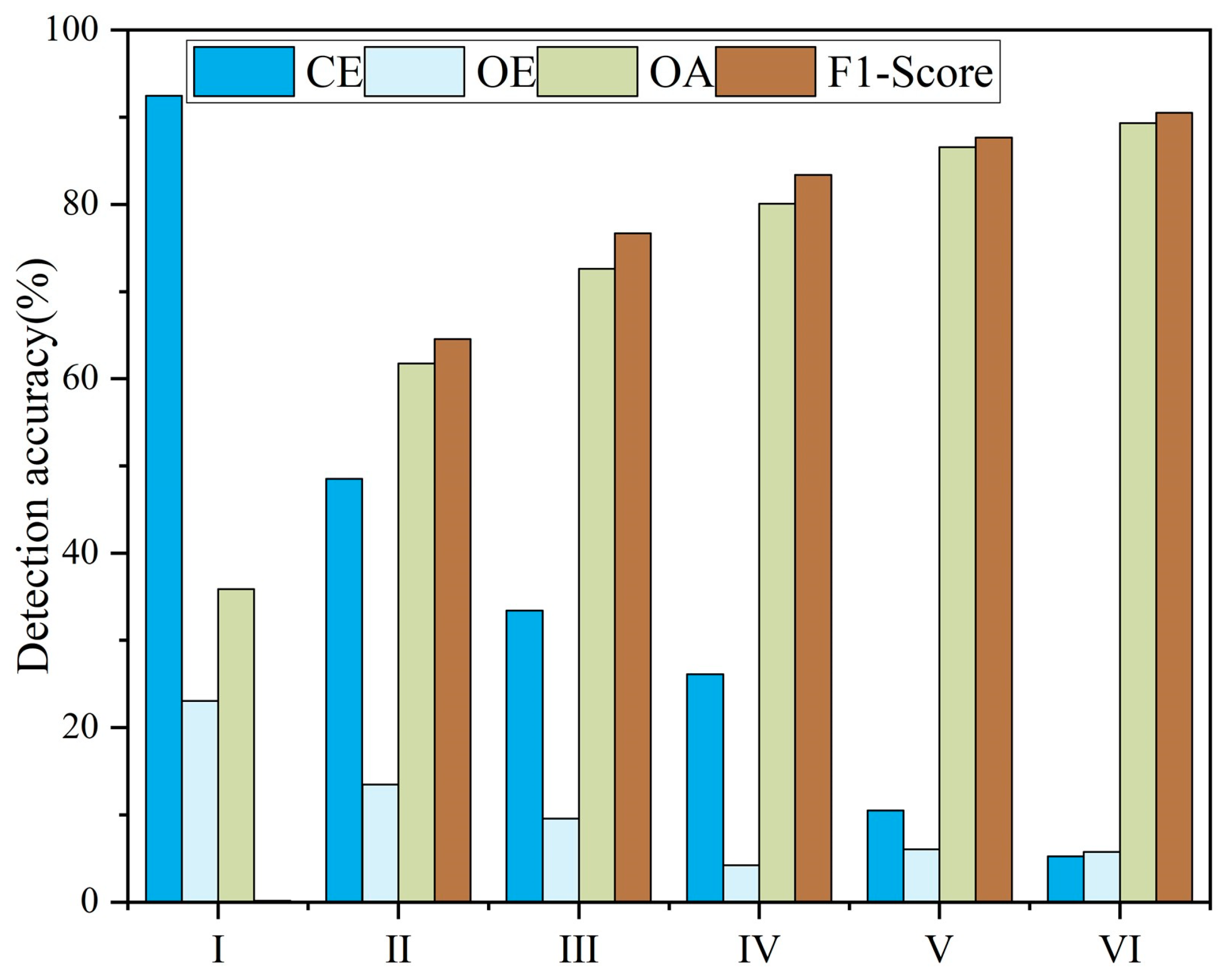
3.5. Experiment Design
4. Results
4.1. Evaluating the Quality of Temporal Trajectory
4.2. Evaluating the Effectiveness of the iLandTrendr Algorithm for Forest Disturbance Mapping
4.3. Spatiotemporal Characteristics of Forest Disturbance in Yunnan Province from 1986 to 2023
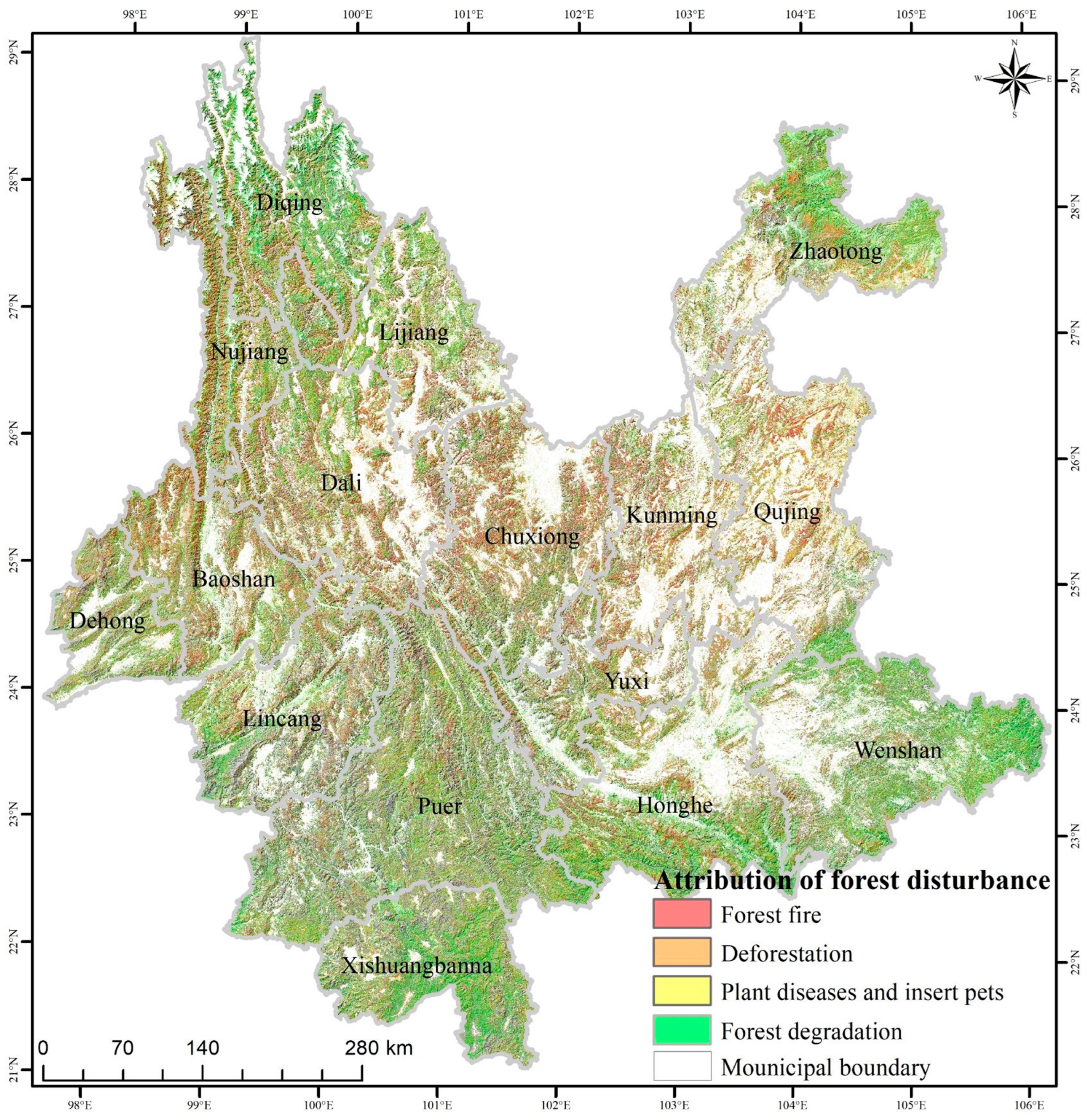
4.4. Attribution Analysis of Forest Disturbance
5. Discussions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Seidl, R.; Thom, D.; Kautz, M.; Martin-Benito, D.; Peltoniemi, M.; Vacchiano, G.; Wild, J.; Ascoli, D.; Petr, M.; Honkaniemi, J.; et al. Forest disturbances under climate change. Nat. Clim. Chang. 2017, 7, 395–402. [Google Scholar] [CrossRef] [PubMed]
- Cannon, J.B.; Peterson, C.J.; O’Brien, J.J.; Brewer, J.S. A review and classification of interactions between forest disturbance from wind and fire. For. Ecol. Manag. 2017, 406, 381–390. [Google Scholar] [CrossRef]
- van Lierop, P.; Lindquist, E.; Sathyapala, S.; Franceschini, G. Global forest area disturbance from fire, insect pests, diseases and severe weather events. For. Ecol. Manag. 2015, 352, 78–88. [Google Scholar] [CrossRef]
- Santos, A.M.D.; Silva, C.; Almeida Junior, P.M.; Rudke, A.P.; Melo, S.N. Deforestation drivers in the Brazilian Amazon: Assessing new spatial predictors. J. Environ. Manag. 2021, 294, 113020. [Google Scholar] [CrossRef]
- Pennington, D.N.; Hansel, J.R.; Gorchov, D.L. Urbanization and riparian forest woody communities: Diversity, composition, and structure within a metropolitan landscape. Biol. Conserv. 2010, 143, 182–194. [Google Scholar] [CrossRef]
- Trigueiro, W.R.; Nabout, J.C.; Tessarolo, G. Uncovering the spatial variability of recent deforestation drivers in the Brazilian Cerrado. J. Environ. Manag. 2020, 275, 111243. [Google Scholar] [CrossRef]
- da Silva, C.F.A.; Dos Santos, A.M.; de Melo, S.N.; Rudke, A.P.; de Almeida Junior, P.M. Spatial modelling of deforestation-related factors in the Brazilian semi-arid biome. Int. J. Environ. Stud. 2023, 80, 1021–1040. [Google Scholar] [CrossRef]
- Qi, J.-H.; Fan, Z.-X.; Fu, P.-L.; Zhang, Y.-J.; Sterck, F.; Mencuccini, M. Differential determinants of growth rates in subtropical evergreen and deciduous juvenile trees: Carbon gain, hydraulics and nutrient-use efficiencies. Tree Physiol. 2021, 41, 12–23. [Google Scholar] [CrossRef]
- Seidl, R.; Schelhaas, M.J.; Rammer, W.; Verkerk, P.J. Increasing forest disturbances in Europe and their impact on carbon storage. Nat. Clim. Chang. 2014, 4, 806–810. [Google Scholar] [CrossRef]
- Espirito-Santo, F.D.; Gloor, M.; Keller, M.; Malhi, Y.; Saatchi, S.; Nelson, B.; Junior, R.C.; Pereira, C.; Lloyd, J.; Frolking, S.; et al. Size and frequency of natural forest disturbances and the Amazon forest carbon balance. Nat. Commun. 2014, 5, 3434. [Google Scholar] [CrossRef]
- Shang, R.; Chen, J.M.; Xu, M.; Lin, X.; Li, P.; Yu, G.; He, N.; Xu, L.; Gong, P.; Liu, L.; et al. China’s current forest age structure will lead to weakened carbon sinks in the near future. Innovation 2023, 4, 100515. [Google Scholar] [CrossRef]
- Sun, R.; Zhao, F.; Huang, C.; Huang, H.; Lu, Z.; Zhao, P.; Ni, X.; Meng, R. Integration of deep learning algorithms with a Bayesian method for improved characterization of tropical deforestation frontiers using Sentinel-1 SAR imagery. Remote Sens. Environ. 2023, 298, 113821. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Cohen, W.B.; Kennedy, R.E. Using Landsat-derived disturbance history (1972–2010) to predict current forest structure. Remote Sens. Environ. 2012, 122, 146–165. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Brondízio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2010, 25, 2365–2401. [Google Scholar] [CrossRef]
- Verbesselt, J.; Hyndman, R.; Newnham, G.; Culvenor, D. Detecting trend and seasonal changes in satellite image time series. Remote Sens. Environ. 2010, 114, 106–115. [Google Scholar] [CrossRef]
- Seidl, R.; Fernandes, P.M.; Fonseca, T.F.; Gillet, F.; Jönsson, A.M.; Merganičová, K.; Netherer, S.; Arpaci, A.; Bontemps, J.-D.; Bugmann, H.; et al. Modelling natural disturbances in forest ecosystems: A review. Ecol. Model. 2011, 222, 903–924. [Google Scholar] [CrossRef]
- Griffiths, P.; Kuemmerle, T.; Baumann, M.; Radeloff, V.C.; Abrudan, I.V.; Lieskovsky, J.; Munteanu, C.; Ostapowicz, K.; Hostert, P. Forest disturbances, forest recovery, and changes in forest types across the Carpathian ecoregion from 1985 to 2010 based on Landsat image composites. Remote Sens. Environ. 2014, 151, 72–88. [Google Scholar] [CrossRef]
- DeVries, B.; Verbesselt, J.; Kooistra, L.; Herold, M. Robust monitoring of small-scale forest disturbances in a tropical montane forest using Landsat time series. Remote Sens. Environ. 2015, 161, 107–121. [Google Scholar] [CrossRef]
- Malila, W.A. Change vector analysis: An approach for detecting forest changes with Landsat. In Proceedings of the LARS symposia, West Lafayette, IN, USA, 3–6 June 1980; p. 385. [Google Scholar]
- Healey, S.; Cohen, W.; Zhiqiang, Y.; Krankina, O. Comparison of Tasseled Cap-based Landsat data structures for use in forest disturbance detection. Remote Sens. Environ. 2005, 97, 301–310. [Google Scholar] [CrossRef]
- Shimada, M.; Itoh, T.; Motooka, T.; Watanabe, M.; Shiraishi, T.; Thapa, R.; Lucas, R. New global forest/non-forest maps from ALOS PALSAR data (2007–2010). Remote Sens. Environ. 2014, 155, 13–31. [Google Scholar] [CrossRef]
- Lv, Z.Y.; Liu, T.F.; Zhang, P.; Benediktsson, J.A.; Lei, T.; Zhang, X. Novel Adaptive Histogram Trend Similarity Approach for Land Cover Change Detection by Using Bitemporal Very-High-Resolution Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9554–9574. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Zhou, Q.; Tang, F.; Zhang, B.; Huang, N.; Nath, B. Continuous Change Detection and Classification—Spectral Trajectory Breakpoint Recognition for Forest Monitoring. Land 2022, 11, 504. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, C.; Liu, X.; Zhu, L.; Yang, Q.; Wang, Q.; Zhang, Q.; Meng, Y. Object-based change detection for vegetation disturbance and recovery using Landsat time series. GIScience Remote Sens. 2022, 59, 1706–1721. [Google Scholar] [CrossRef]
- DeVries, B.; Decuyper, M.; Verbesselt, J.; Zeileis, A.; Herold, M.; Joseph, S. Tracking disturbance-regrowth dynamics in tropical forests using structural change detection and Landsat time series. Remote Sens. Environ. 2015, 169, 320–334. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhang, J.; Yang, Z.; Aljaddani, A.H.; Cohen, W.B.; Qiu, S.; Zhou, C. Continuous monitoring of land disturbance based on Landsat time series. Remote Sens. Environ. 2020, 238, 111116. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E.; Olofsson, P. Continuous monitoring of forest disturbance using all available Landsat imagery. Remote Sens. Environ. 2012, 122, 75–91. [Google Scholar] [CrossRef]
- Yin, H.; Prishchepov, A.V.; Kuemmerle, T.; Bleyhl, B.; Buchner, J.; Radeloff, V.C. Mapping agricultural land abandonment from spatial and temporal segmentation of Landsat time series. Remote Sens. Environ. 2018, 210, 12–24. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Cohen, W.B.; Schroeder, T.A. Trajectory-based change detection for automated characterization of forest disturbance dynamics. Remote Sens. Environ. 2007, 110, 370–386. [Google Scholar] [CrossRef]
- Shen, J.; Chen, G.; Hua, J.; Huang, S.; Ma, J. Contrasting Forest Loss and Gain Patterns in Subtropical China Detected Using an Integrated LandTrendr and Machine-Learning Method. Remote Sens. 2022, 14, 3238. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]
- Cohen, W.B.; Yang, Z.; Healey, S.P.; Kennedy, R.E.; Gorelick, N. A LandTrendr multispectral ensemble for forest disturbance detection. Remote Sens. Environ. 2018, 205, 131–140. [Google Scholar] [CrossRef]
- Nasirzadehdizaji, R.; Balik Sanli, F.; Abdikan, S.; Cakir, Z.; Sekertekin, A.; Ustuner, M. Sensitivity Analysis of Multi-Temporal Sentinel-1 SAR Parameters to Crop Height and Canopy Coverage. Appl. Sci. 2019, 9, 655. [Google Scholar] [CrossRef]
- Li, Y.; Wu, Z.; Xu, X.; Fan, H.; Tong, X.; Liu, J. Forest disturbances and the attribution derived from yearly Landsat time series over 1990–2020 in the Hengduan Mountains Region of Southwest China. For. Ecosyst. 2021, 8, 73. [Google Scholar] [CrossRef]
- Kennedy, R.; Yang, Z.; Gorelick, N.; Braaten, J.; Cavalcante, L.; Cohen, W.; Healey, S. Implementation of the LandTrendr Algorithm on Google Earth Engine. Remote Sens. 2018, 10, 691. [Google Scholar] [CrossRef]
- Danylo, O.; Pirker, J.; Lemoine, G.; Ceccherini, G.; See, L.; McCallum, I.; Hadi; Kraxner, F.; Achard, F.; Fritz, S. A map of the extent and year of detection of oil palm plantations in Indonesia, Malaysia and Thailand. Sci. Data 2021, 8, 96. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A. Savitzky-Golay Smoothing Filters. Comput. Phys. 1990, 4, 669–672. [Google Scholar] [CrossRef]
- Seron, M.M.; Braslavsky, J.H.; Goodwin, G.C. Fundamental Limitations in Filtering and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Zhu, L.; Liu, X.; Wu, L.; Tang, Y.; Meng, Y. Long-Term Monitoring of Cropland Change near Dongting Lake, China, Using the LandTrendr Algorithm with Landsat Imagery. Remote Sens. 2019, 11, 1234. [Google Scholar] [CrossRef]
- Bright, B.C.; Hudak, A.T.; Kennedy, R.E.; Braaten, J.D.; Henareh Khalyani, A. Examining post-fire vegetation recovery with Landsat time series analysis in three western North American forest types. Fire Ecol. 2019, 15, 8. [Google Scholar] [CrossRef]
- Yin, X.; Kou, W.; Yun, T.; Gu, X.; Lai, H.; Chen, Y.; Wu, Z.; Chen, B. Tropical Forest Disturbance Monitoring Based on Multi-Source Time Series Satellite Images and the LandTrendr Algorithm. Forests 2022, 13, 2038. [Google Scholar] [CrossRef]
- Li, M.; Zuo, S.; Su, Y.; Zheng, X.; Wang, W.; Chen, K.; Ren, Y. An Approach Integrating Multi-Source Data with LandTrendr Algorithm for Refining Forest Recovery Detection. Remote Sens. 2023, 15, 2667. [Google Scholar] [CrossRef]
- Brooks, E.B.; Wynne, R.H.; Thomas, V.A.; Blinn, C.E.; Coulston, J.W. On-the-fly massively multitemporal change detection using statistical quality control charts and Landsat data. IEEE Trans. Geosci. Remote Sens. 2013, 52, 3316–3332. [Google Scholar] [CrossRef]
- Li, Y.; Xu, X.; Wu, Z.; Fan, H.; Tong, X.; Liu, J. A forest type-specific threshold method for improving forest disturbance and agent attribution mapping. GIScience Remote Sens. 2022, 59, 1624–1642. [Google Scholar] [CrossRef]
- Qiu, D.; Liang, Y.; Shang, R.; Chen, J.M. Improving LandTrendr Forest Disturbance Mapping in China Using Multi-Season Observations and Multispectral Indices. Remote Sens. 2023, 15, 2381. [Google Scholar] [CrossRef]
- Key, C.; Benson, N. Landscape assessment: Remote sensing of severity, the normalized burn ratio and ground measure of severity, the composite burn index. In FIREMON: Fire Effects Monitoring and Inventory System; USDA Forest Service, Rocky Mountain Research Station: Ogden, UT, USA, 2005. [Google Scholar]
- Zhang, Z.; van Coillie, F.; Ou, X.; de Wulf, R. Integration of Satellite Imagery, Topography and Human Disturbance Factors Based on Canonical Correspondence Analysis Ordination for Mountain Vegetation Mapping: A Case Study in Yunnan, China. Remote Sens. 2014, 6, 1026–1056. [Google Scholar] [CrossRef]
- Zheng, P.; Fang, P.; Wang, L.; Ou, G.; Xu, W.; Dai, F.; Dai, Q. Synergism of Multi-Modal Data for Mapping Tree Species Distribution—A Case Study from a Mountainous Forest in Southwest China. Remote Sens. 2023, 15, 979. [Google Scholar] [CrossRef]
- Li, R.; Kraft, N.J.; Yang, J.; Wang, Y. A phylogenetically informed delineation of floristic regions within a biodiversity hotspot in Yunnan, China. Sci. Rep. 2015, 5, 9396. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Peng, H. Notes on the key role of stenochoric endemic plants in the floristic regionalization of Yunnan. Plant Divers. 2016, 38, 289–294. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, L.; Du, L.; Zheng, H.; Nie, A.; Rao, M.; Bo Pang, J.; Nie, S. Population data for 20 autosomal STR loci in the Yi ethnic minority from Yunnan Province, Southwest China. Forensic Sci. Int. Genet. 2017, 28, e43–e44. [Google Scholar] [CrossRef]
- Wu, F.; Wang, X.; Cai, Y.; Li, C. Spatiotemporal analysis of precipitation trends under climate change in the upper reach of Mekong River basin. Quat. Int. 2016, 392, 137–146. [Google Scholar] [CrossRef]
- He, L.; Shi, Z. Spatiotemporal changes of impervious surface areas in Great Mekong Subregion from 1992 to 2019. J. Appl. Remote Sens. 2021, 15, 048506. [Google Scholar] [CrossRef]
- Zhu, Z.; Deng, X.; Zhao, F.; Li, S.; Wang, L. How Environmental Factors Affect Forest Fire Occurrence in Yunnan Forest Region. Forests 2022, 13, 1392. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, 183. [Google Scholar] [CrossRef]
- Fick, S.E.; Hijmans, R.J. WorldClim 2: New 1 km spatial resolution climate surfaces for global land areas. Int. J. Climatol. 2017, 37, 4302–4315. [Google Scholar] [CrossRef]
- Li, R.; Fang, P.; Xu, W.; Wang, L.; Ou, G.; Zhang, W.; Huang, X. Classifying Forest Types over a Mountainous Area in Southwest China with Landsat Data Composites and Multiple Environmental Factors. Forests 2022, 13, 135. [Google Scholar] [CrossRef]
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Joseph Hughes, M.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, X.; Vogelmann, J.E.; Gao, F.; Jin, S. A simple and effective method for filling gaps in Landsat ETM+ SLC-off images. Remote Sens. Environ. 2011, 115, 1053–1064. [Google Scholar] [CrossRef]
- Roy, D.P.; Kovalskyy, V.; Zhang, H.K.; Vermote, E.F.; Yan, L.; Kumar, S.S.; Egorov, A. Characterization of Landsat-7 to Landsat-8 reflective wavelength and normalized difference vegetation index continuity. Remote Sens. Environ. 2016, 185, 57–70. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Bahamondez, C.; Álvarez, O.; Itzelcoaut, M. Global Forest Resources Assessment 2010 Main Report; Food and Agriculture Organization of the United Nations: Roma, Italy, 2010. [Google Scholar]
- Shamir, A. A survey on Mesh Segmentation Techniques. Comput. Graph. Forum 2008, 27, 1539–1556. [Google Scholar] [CrossRef]
- Zanaga, D.; Van De Kerchove, R.; Daems, D.; De Keersmaecker, W.; Brockmann, C.; Kirches, G.; Wevers, J.; Cartus, O.; Santoro, M.; Fritz, S. ESA WorldCover 10 m 2021 v200. 2022. Available online: https://pure.iiasa.ac.at/id/eprint/18478/ (accessed on 12 November 2023).
- Liu, X.Q.; Su, Y.J.; Hu, T.Y.; Yang, Q.L.; Liu, B.B.; Deng, Y.F.; Tang, H.; Tang, Z.Y.; Fang, J.Y.; Guo, Q.H. Neural network guided interpolation for mapping canopy height of China’s forests by integrating GEDI and ICESat-2 data. Remote Sens. Environ. 2022, 269, 112844. [Google Scholar] [CrossRef]
- Li, C.; Gong, P.; Wang, J.; Zhu, Z.; Biging, G.S.; Yuan, C.; Hu, T.; Zhang, H.; Wang, Q.; Li, X.; et al. The first all-season sample set for mapping global land cover with Landsat-8 data. Sci. Bull. 2017, 62, 508–515. [Google Scholar] [CrossRef]
- Powell, M.J. A Direct Search Optimization Method That Models the Objective and Constraint Functions by Linear Interpolation; Springer: Berlin/Heidelberg, Germany, 1994. [Google Scholar]
- Cao, R.; Chen, Y.; Shen, M.; Chen, J.; Zhou, J.; Wang, C.; Yang, W. A simple method to improve the quality of NDVI time-series data by integrating spatiotemporal information with the Savitzky-Golay filter. Remote Sens. Environ. 2018, 217, 244–257. [Google Scholar] [CrossRef]
- Du, Z.; Yu, L.; Yang, J.; Xu, Y.; Chen, B.; Peng, S.; Zhang, T.; Fu, H.; Harris, N.; Gong, P. A global map of planting years of plantations. Sci. Data 2022, 9, 141. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Li, Y.; Xu, X.; Fan, H. Topographic effects amplify forest disturbances detected by yearly wide-time-window Landsat time series. GIScience Remote Sens. 2023, 60, 2222627. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, L.; Chen, X.; Gao, Y.; Xie, S.; Mi, J. GLC_FCS30: Global land-cover product with fine classification system at 30 m using time-series Landsat imagery. Earth Syst. Sci. Data 2020, 13, 2753–2776. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.; Braaten, J.; Copass, C.; Antonova, N.; Jordan, C.; Nelson, P. Attribution of disturbance change agent from Landsat time-series in support of habitat monitoring in the Puget Sound region, USA. Remote Sens. Environ. 2015, 166, 271–285. [Google Scholar] [CrossRef]
- Huo, L.-Z.; Boschetti, L.; Sparks, A. Object-Based Classification of Forest Disturbance Types in the Conterminous United States. Remote Sens. 2019, 11, 477. [Google Scholar] [CrossRef]
- Senf, C.; Seidl, R. Storm and fire disturbances in Europe: Distribution and trends. Glob. Chang. Biol. 2021, 27, 3605–3619. [Google Scholar] [CrossRef]
- Xiao, C.; Li, P.; Feng, Z. Monitoring annual dynamics of mature rubber plantations in Xishuangbanna during 1987–2018 using Landsat time series data: A multiple normalization approach. Int. J. Appl. Earth Obs. Geoinf. 2019, 77, 30–41. [Google Scholar] [CrossRef]
- Yang, J.; Huang, X. The 30 m annual land cover dataset and its dynamics in China from 1990 to 2019. Earth Syst. Sci. Data 2021, 13, 3907–3925. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite Parameters | Landsat 5 | Landsat 7 | Landsat 8 | |
|---|---|---|---|---|
| Dataset availability | 1986–2011 | 2012–2013 | 2014–2023 | |
| Temporal resolution | 16 days | 16 days | 16 days | |
| Spatial resolution | 30 m | 30 m | 30 m | |
| Sensor | TM | ETM | OLI/TIRS | |
| Atmospheric correction | LEDAPS | LEDAPS | LaSRC | |
| Cloud mask | CFMASK | CFMASK | CFMASK | |
| Scenes covering | 170 km × 183 km | 170 km × 183 km | 170 km × 183 km | |
| Bands | Name | Wavelength (um) | Name | Wavelength (µm) |
| Band1 | Blue | 0.45–0.52 | Ultra-blue | 0.435–0.451 |
| Band2 | Green | 0.52–0.60 | Blue | 0.451–0.512 |
| Band3 | Red | 0.63–0.69 | Green | 0.533–0.590 |
| Band4 | Near-infrared | 0.77–0.90 | Red | 0.636–0.673 |
| Band5 | Shortwave infrared 1 | 1.55–1.75 | Near-infrared | 0.851–0.879 |
| Band6 | Brightness temperature | 10.40–12.50 | Shortwave infrared 1 | 1.566–1.651 |
| Band7 | Shortwave infrared 2 | 2.05–2.35 | Shortwave infrared 2 | 2.107–2.294 |
| Band10 | Brightness temperature | 10.60–11.19 | ||
| Band11 | Brightness temperature | 11.50–12.51 | ||
| Data Source | Sample Quantity |
|---|---|
| Statistical data on forest fires in Yunnan Province | 38 |
| FAST | 3 |
| Visual interpretation based on high-resolution images | 804 |
| Experimental Schemes | Description |
|---|---|
| I | NBR time-series data from June to September + Sliding window method |
| II | NBR time-series data from January to April + Sliding window method |
| III | NBR time-series data from January to April + Linear interpolation method |
| IV | NBR time-series data from January to April + Linear interpolation method + SG filter |
| V | NBR time-series data from January to April + Linear interpolation method + Constrained SG filter |
| VI | NBR time-series data from January to April + Linear interpolation method + Constrained SG filter + Correction of forest disturbance detection results |
| CE (%) | OE (%) | OA (%) | F1 Score (%) | |
|---|---|---|---|---|
| I | 92.46 | 23.08 | 35.88 | 13.73 |
| II | 48.49 | 13.50 | 61.73 | 64.57 |
| III | 33.42 | 9.56 | 72.62 | 76.70 |
| IV | 26.13 | 4.23 | 80.1 | 83.40 |
| V | 10.52 | 6.05 | 86.58 | 87.66 |
| VI | 5.25 | 5.75 | 89.32 | 90.50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, L.; Hong, L.; Zhu, A.-X. An Improved LandTrendr Algorithm for Forest Disturbance Detection Using Optimized Temporal Trajectories of the Spectrum: A Case Study in Yunnan Province, China. Forests 2024, 15, 1539. https://doi.org/10.3390/f15091539
He L, Hong L, Zhu A-X. An Improved LandTrendr Algorithm for Forest Disturbance Detection Using Optimized Temporal Trajectories of the Spectrum: A Case Study in Yunnan Province, China. Forests. 2024; 15(9):1539. https://doi.org/10.3390/f15091539
Chicago/Turabian StyleHe, Li, Liang Hong, and A-Xing Zhu. 2024. "An Improved LandTrendr Algorithm for Forest Disturbance Detection Using Optimized Temporal Trajectories of the Spectrum: A Case Study in Yunnan Province, China" Forests 15, no. 9: 1539. https://doi.org/10.3390/f15091539
APA StyleHe, L., Hong, L., & Zhu, A.-X. (2024). An Improved LandTrendr Algorithm for Forest Disturbance Detection Using Optimized Temporal Trajectories of the Spectrum: A Case Study in Yunnan Province, China. Forests, 15(9), 1539. https://doi.org/10.3390/f15091539