
Deep Neural Networks for Spatial-Temporal Cyber-Physical Systems: A Survey





Abstract
:1. Introduction
- The applications of Deep Neural Networks (DNNs)—convolutional, recurrent, and graphs in handling spatial-temporal data in CPS are systematically reviewed.
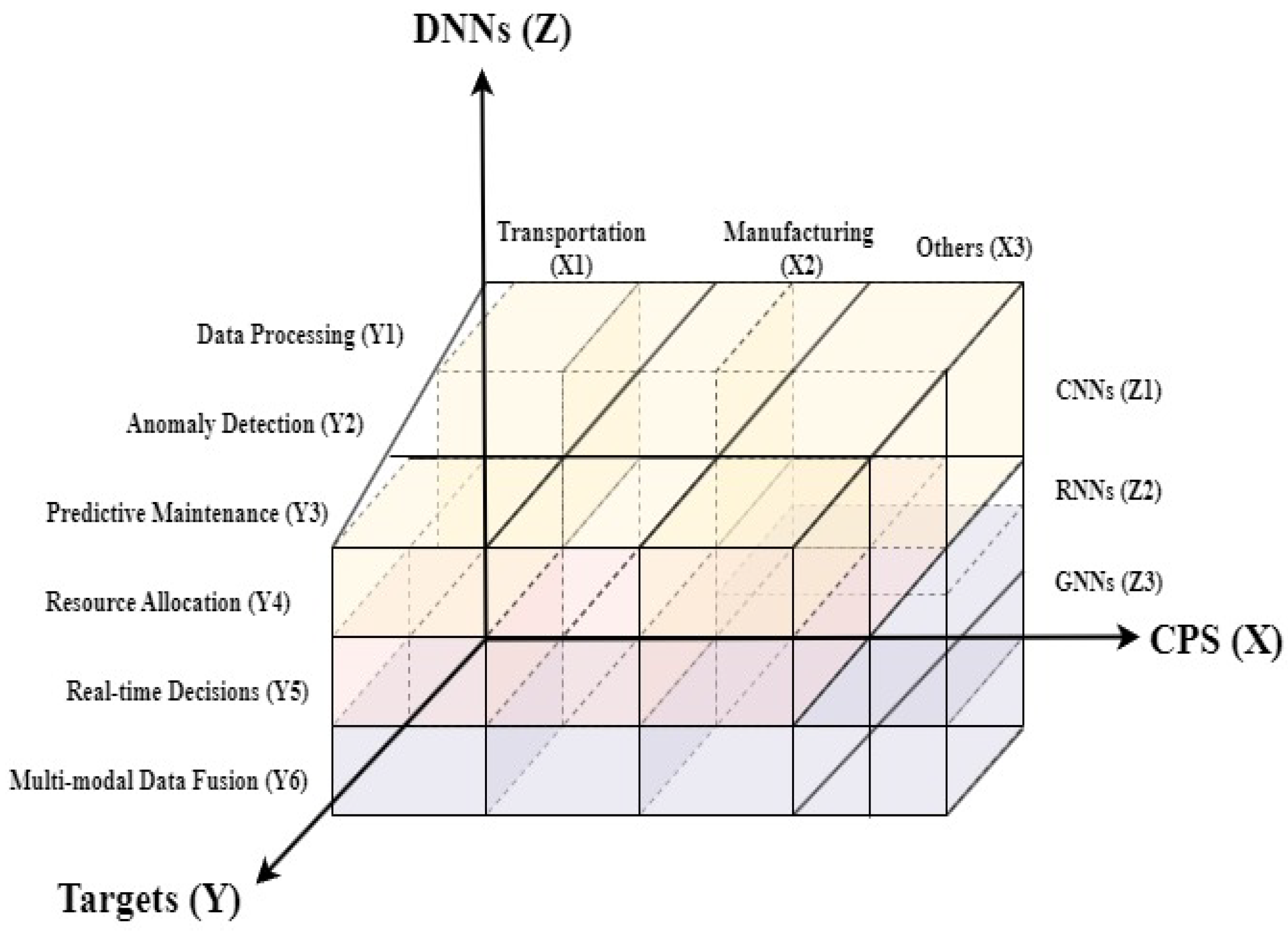
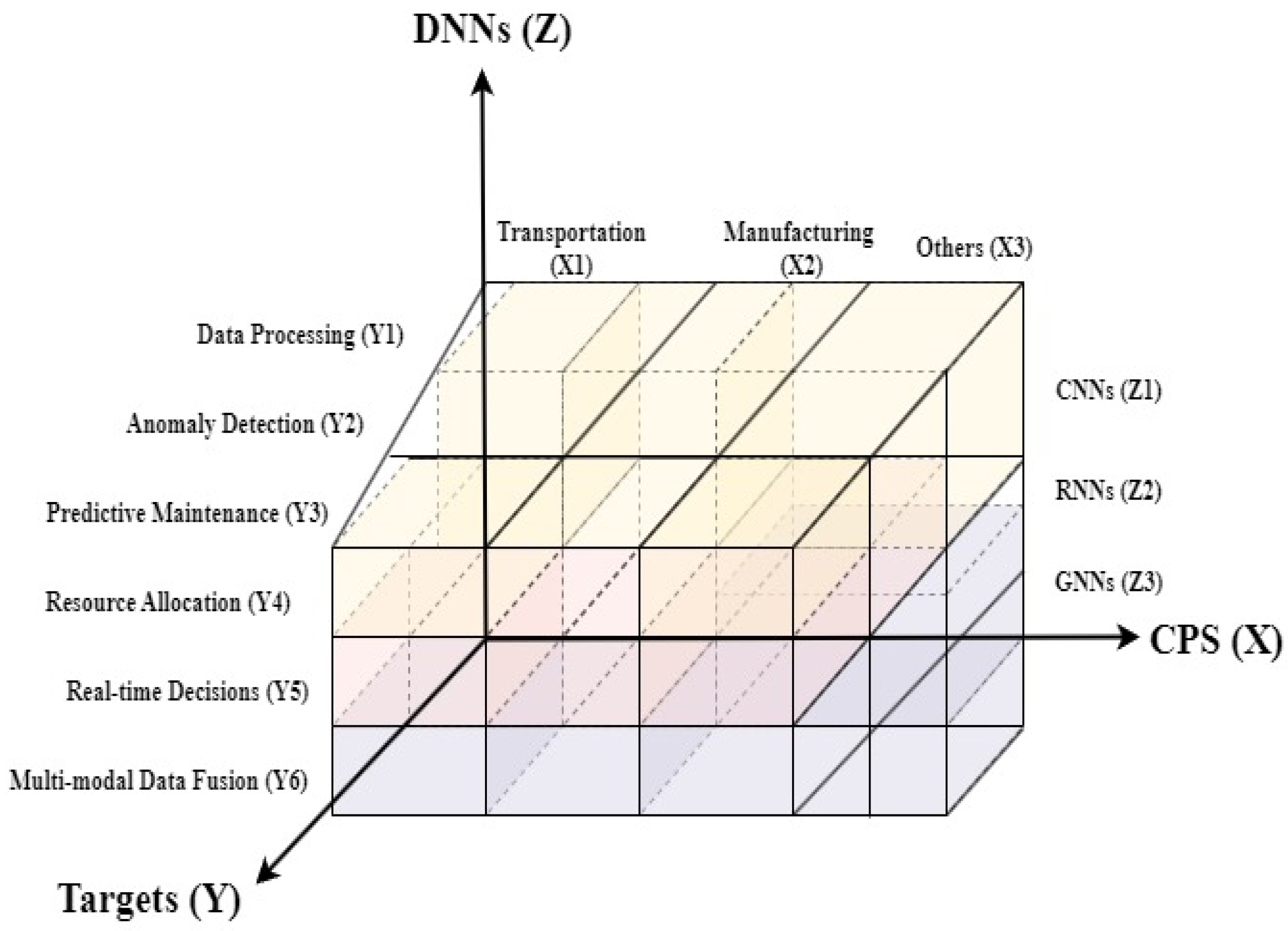
- A three-dimensional problem space that considers: CPS (transportation, manufacturing, and others), Target (spatial-temporal data processing, anomaly detection, predictive maintenance, resource allocation, realtime decisions, and multi-modal data fusion), and DNN scheme (CNNs, RNNs, and GNNs) is proposed.
- Future research directions concerning data quality, strict performance assurance and reliability, safety, and security resilience have been outlined.
2. Preliminaries
2.1. Deep Neural Networks (DNN)
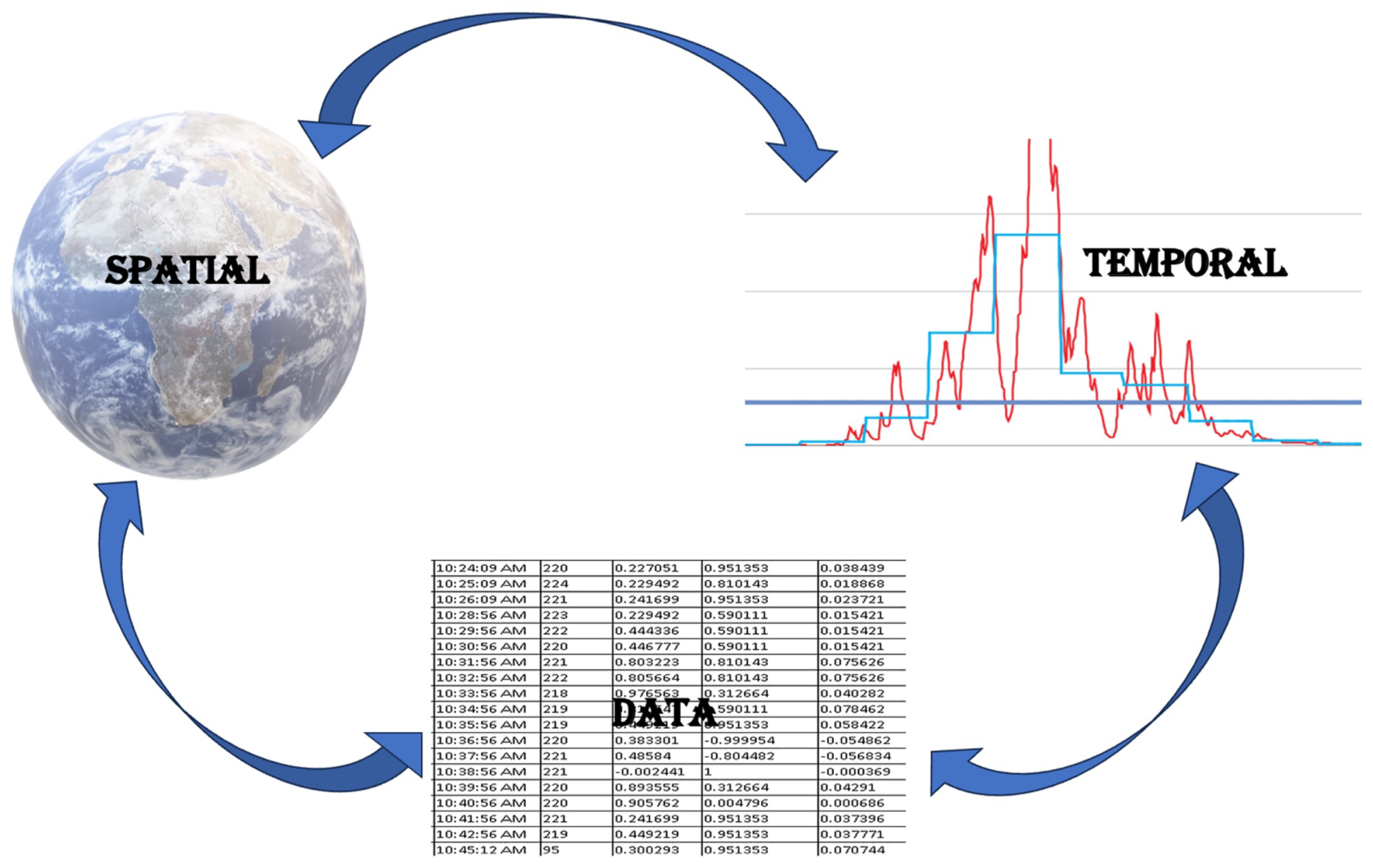
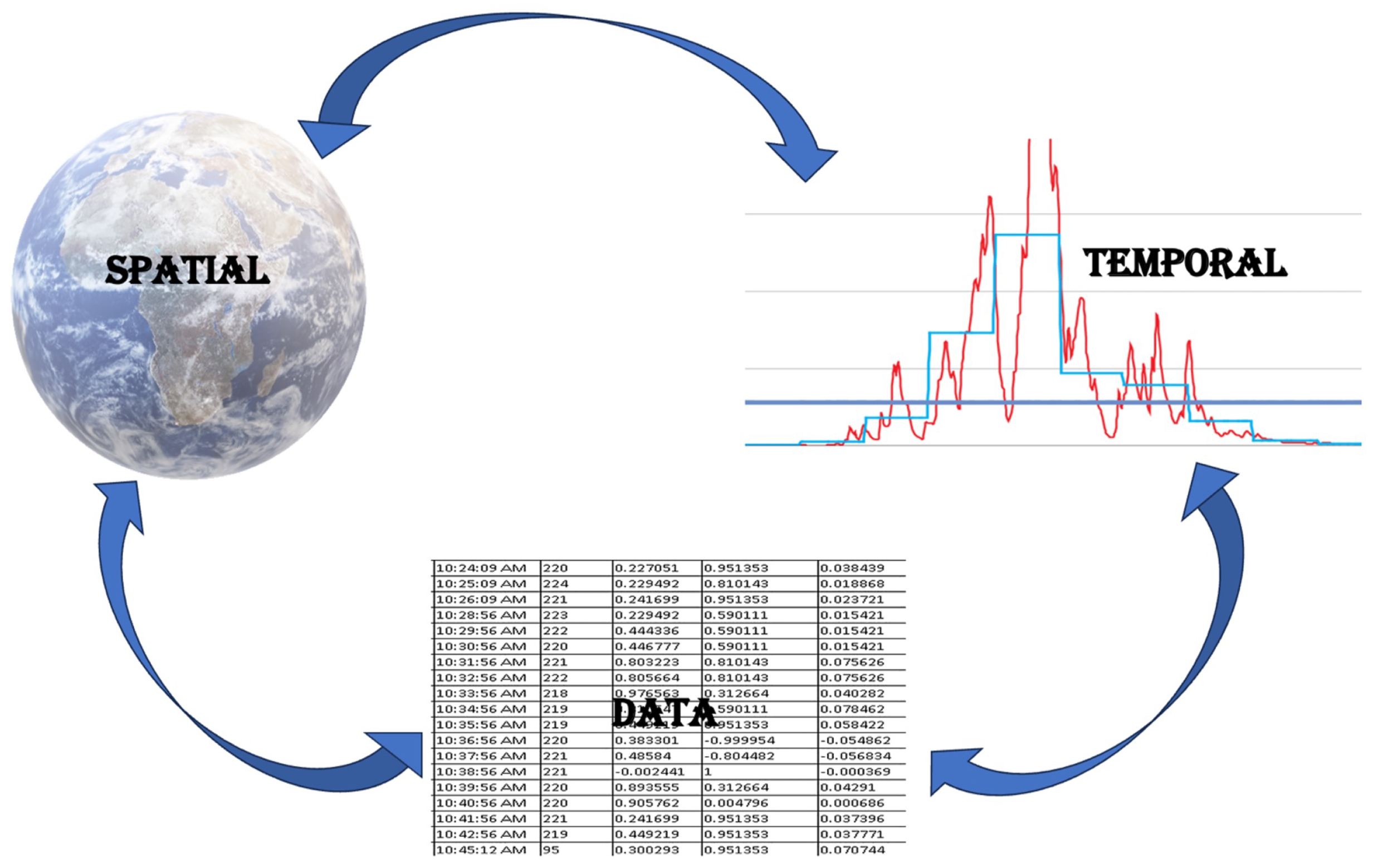
2.2. Spatial-Temporal Data
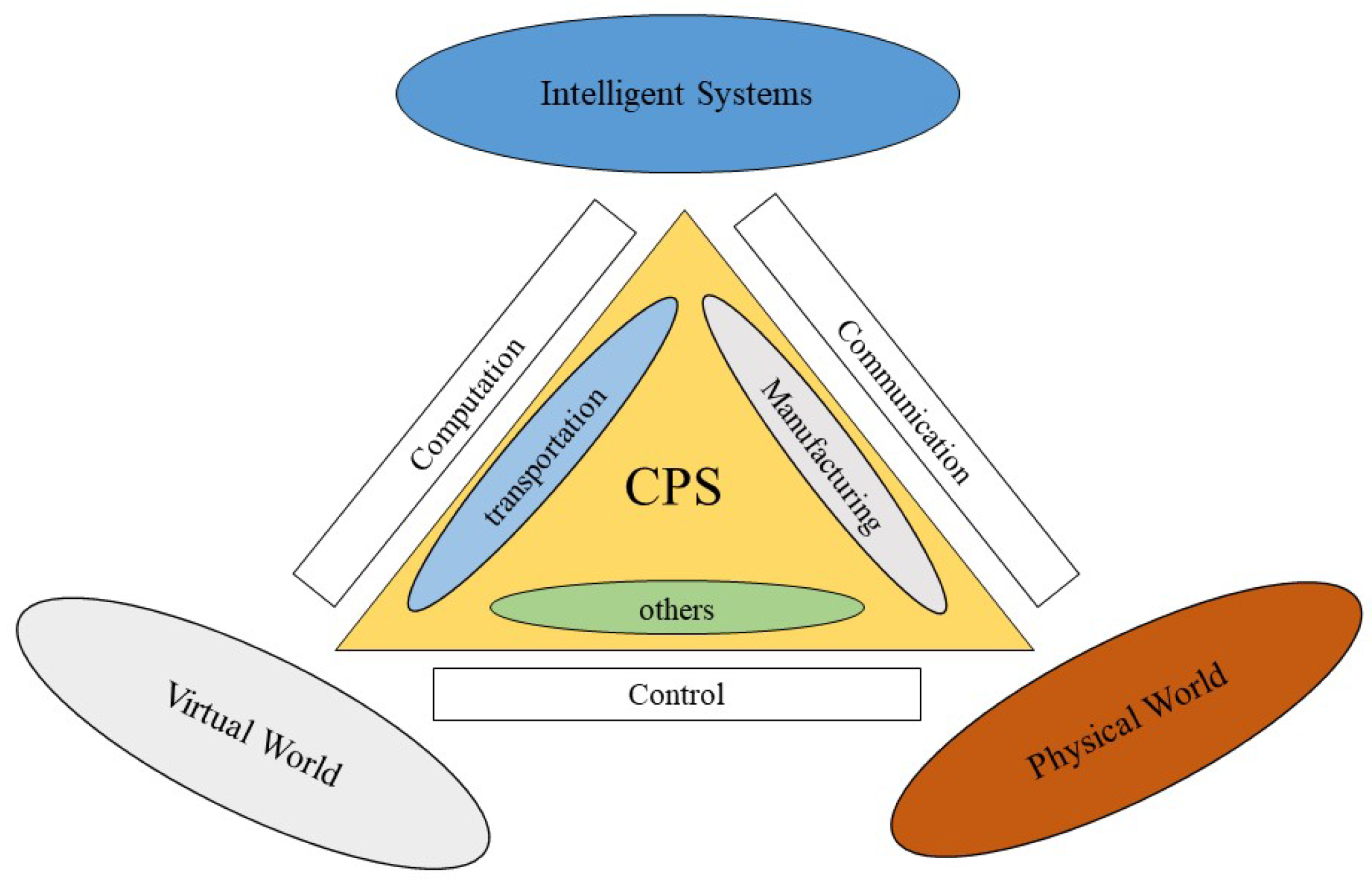
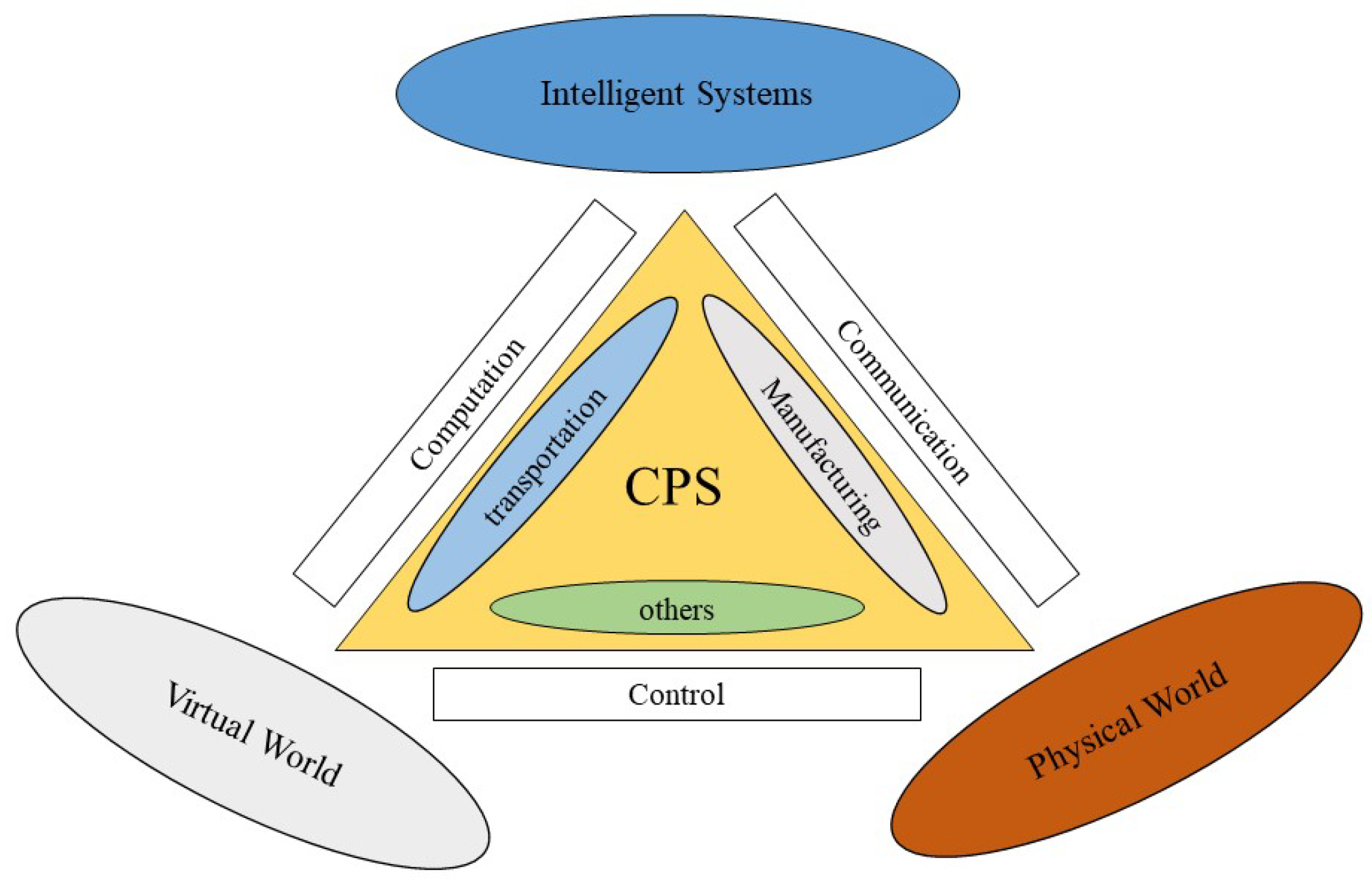
2.3. Cyber Physical Systems (CPS)
3. DNNs in CPS-Based Spatial-Temporal Data
3.1. The Problem Space
- Spatial-temporal Data Processing (): It involves using DNNs to process and analyze spatial-temporal data in CPS, including feature extraction, classification, regression, and future event predictions.
- Anomaly Detection (): It involves using DNNs to detect anomalies based on spatial-temporal data in CPS, such as faults, attacks, or intrusions.
- Predictive Maintenance (): It involves using DNNs to predict the performance and maintenance needs of CPS according to spatial-temporal data, such as predicting the failure of smart manufacturing systems.
- Resource Allocation (): It involves using DNNs to optimize the allocation of resources in CPS, such as allocating network resources in communication networks and production logistics in manufacturing CPS.
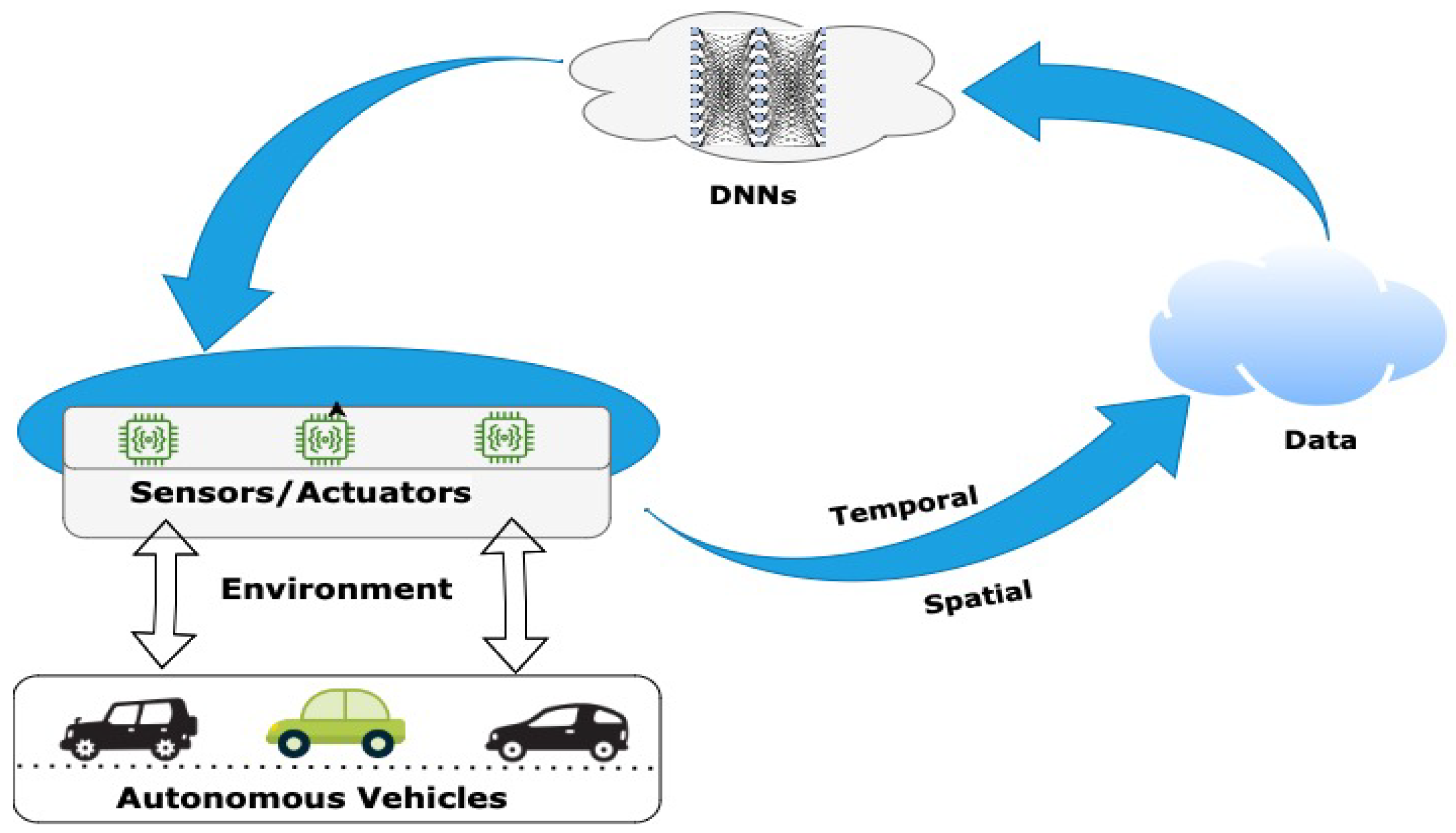
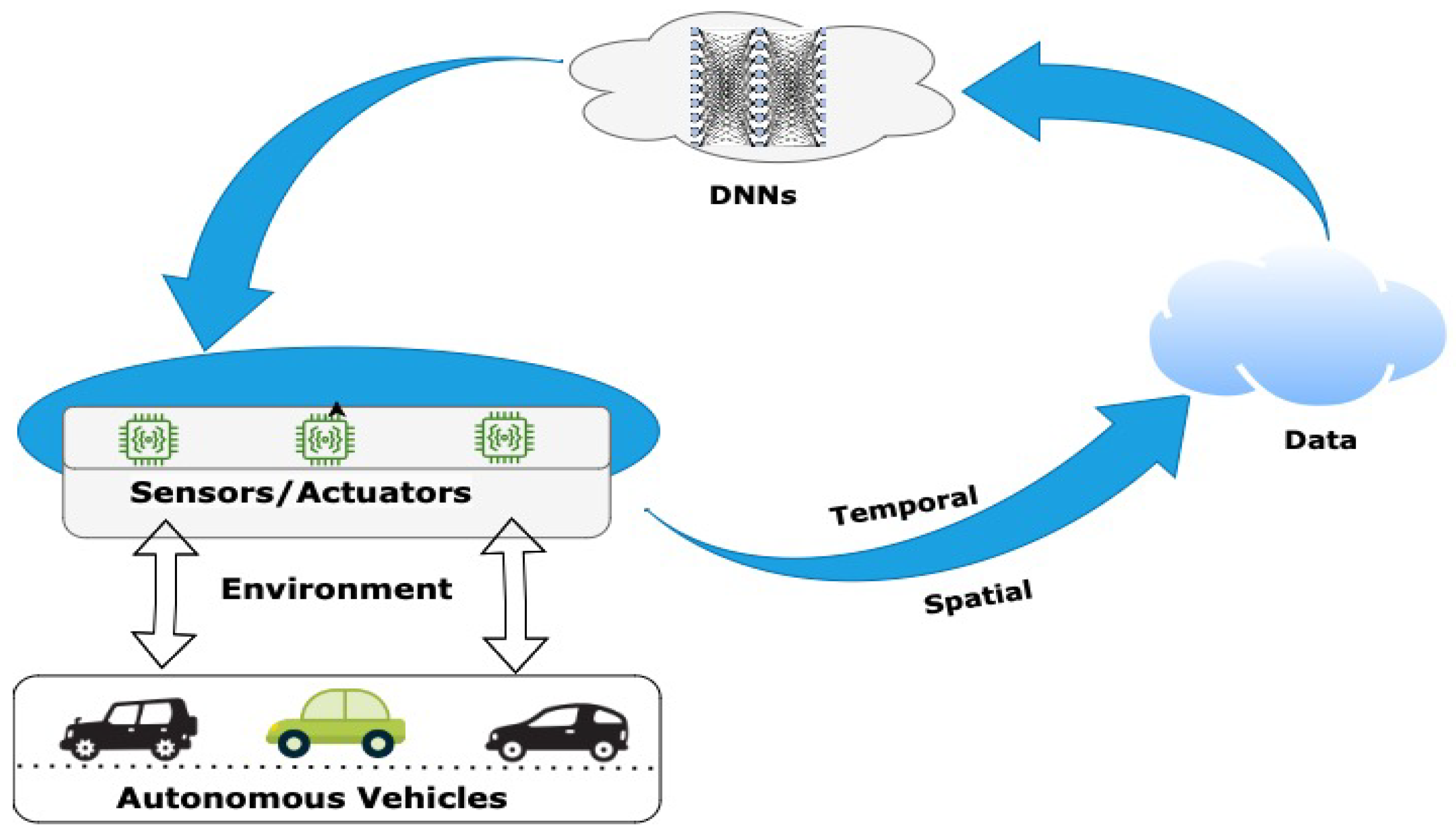
- Real-time Decision (): It makes real-time decisions with spatial-temporal data, controlling the trajectory of autonomous vehicles.
- Multi-modal Data Fusion (): It includes employing DNNs to process data from multiple sources in CPS, such as combining data from sensors and communication networks to provide insightful information to the decision process.
3.2. CPS Application Domains
3.2.1. Transportation CPS
3.2.2. Manufacturing CPS
3.3. DNN Techniques
3.3.1. CNN
3.3.2. RNN
- LSTM: It is an RNN variant designed to deal with challenges in RNNs in handling sequential data. Since conventional RNNs suffer from the “vanishing gradient problem” that limits their capability of capturing long-term dependencies between input and output sequences. LSTMs improve on that by remembering and selectively forgetting information over longer time horizons, making them effective for modeling sequences of variable lengths, such as natural language processing (text or speech). An LSTM consists of four main components: a memory cell, three gating units (an input, a forget, and an output gate), and an activation function. The memory cell stores information over long periods and passes it on to the next time step. The input gate controls data flow into the memory cell according to the current and previous outputs. Based on the input and output from the previous and current cycles, the forget gate determines the data to be erased from the memory cell. The output gate determines the output based on the current input and the current state of the memory cell. The activation function, mostly a hyperbolic tangent or sigmoid function, is used to compute the cell’s current state. At each iteration, the LSTM unit receives an input vector and a hidden state vector from the previous time step and produces an output vector and a new hidden state vector. The input vector is passed through the input gate, and the output gate determines the output vector. The forget gate determines what information to keep from the previous hidden state, and the memory cell updates its internal state based on the input and the last hidden state. The updated memory cell is then passed on to the next time step. LSTMs have been effective in various applications, including speech recognition, machine translation, image captioning, and music composition. They are often combined with other DNNs, such as CNNs or attention mechanisms, to realize performance on given tasks.
- GRU: It is a gating mechanism for RNN. It was introduced to serve as a simplified version of the complex LSTM. Like other RNNs, GRU processes sequential input data, such as text or time series, by maintaining a hidden state that captures information about the past sequence elements. It also uses a gating mechanism to selectively update and reset the hidden state, enabling it to capture longer-term dependencies in the sequence. GRU has two gating mechanisms: the reset gate and the update gate. The reset gate decides the past hidden state to forget, while the update gate makes the current input to incorporate into the new hidden state. GRU is a powerful and flexible neural network architecture that can capture long-term dependencies in sequential data and deal with the “vanishing gradient problem” that bedevils standard RNNs. It has been used in various applications, including NLP, speech/voice recognition, time series prediction, etc.
3.3.3. GNN
4. CPS Application Domains
4.1. Transportation-Based CPS
4.1.1. Traffic Forecasting
4.1.2. Threat Detection

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Objectives | Research Papers |
|---|---|
| <, , (Transportation-Data Processing), > | [23,37,55,56,57,58,59,61,62,63,65,66,67,68,69,70,71] |
| <, (Transportation-Anomaly Detection), > | [64,65,67] |
| <, (Transportation-Predictive Maintenance)> | N/A (No much research conducted in this direction) |
| <, (Transportation-Resource Allocation)> | N/A (No much research conducted in this direction) |
| <, (Transportation-Real-time Decisions), Z3> | [60,68,69] |
| <, (Transportation-Multi-modal Fusion)> | N/A (No much research conducted in this direction) |
4.1.3. Data Inconsistency Identification
4.1.4. Autonomous Vehicle Collision Prediction
4.2. Manufacturing CPS
4.2.1. Real-Time Monitoring of Factory Logistics
4.2.2. Production Resources Allocation
4.2.3. Threat Detection
4.2.4. Predictive Maintenance
4.3. Other CPS
4.3.1. Flood Prediction
4.3.2. CPS-Data Processing
4.3.3. Physical Attack Detection
4.3.4. Real-Time Fire Identification Systems
4.3.5. Medical CPS
5. Challenges and Future Research Directions
- Performance: Real-time communication could be impacted by the latency caused by several protocols, especially when event-driven communication and detection are involved. Some protocols influence the performance of DNNs while handling CPS spatial-temporal data, i.e., by affecting data transmission, size, latency, reliability, and synchronization. For example, network protocols (UDP and TCP by determining the reliability and latency of data transmission), data serialization protocols (JSON, protocol buffers by affecting the data size, encoding/decoding overhead), compression protocols (by scaling/shrinking the data size during transmission to improve the network performance), real-time communication protocols (MQTT, DDS by providing low-latency, publish-subscribe messaging for timely data delivery), and synchronization protocols (PTP, NTP by ensuring time synchronization in distributed systems, which aides coordinated processing.
- Security: CPS has unique system requirements and security challenges. Specifically, the confidentiality, integrity, and availability (CIA) security paradigm has been widely used to design security standards for information technology-driven systems. For example, availability is a crucial property regarding security and an essential requirement of a CPS. Different threats (DoS attacks, malware propagation, etc.) could affect the availability of CPS. Under this situation, computing and networking components in the CPS shall employ effective mitigation measures so that malicious computing requests and traffic can be detected in time and the impact of such attacks can be effectively mitigated. For CPS integrity, an ML model that depends on real-time data inputs is critical for the realization of highly dependable and trustworthy CPS (transportation infrastructure, manufacturing infrastructure, etc.). Data fidelity is crucial for the CPS, as it is the information that can accurately simulate and direct the physical system in response to environmental changes accurately and quickly. In CPS, an adversary could compromise the integrity of sensing data by intercepting the communication channel using either a man-in-the-middle (MITM) attack or the commands transmitted by the programmable logic controllers. Thus, security measures (device authentication, etc.) shall be in place to prevent unauthorized users from changing data. Although solutions based on cryptography have been promoted in the context of CPS, such as those that use TLS, HMACs, or other authentication and integrity guarantees. Historically, such countermeasures have not been widely used due to hardware restrictions and the relative computational cost of deploying protocols and mechanisms. Table 7, summarizes the challenges of utilizing the DNN in CPS spatial-temporal data.
- Data Quality Assurance for Effective DNNs: The spatial-temporal data in CPS is characterized as complex (generated from multiple sources of sensors, microcontrollers, etc.), incomplete (measurement errors, missing values, outliers, etc.), noisy data (real-time streaming data), challenging to interpret, and unavailability in some cases, among others. There is a need to address these challenges, i.e., by developing better data collection techniques, missing data imputation and normalization methods, and new feature extraction procedures that can effectively capture the relevant latent spatial-temporal information in large and complex datasets.Similarly, explainable AI can be leveraged to develop more precise, interpretable, and explainable DNNs that provide the detailed underlying features and relationships driving results or decisions. On the other hand, transfer learning can be leveraged with existing knowledge and pre-trained models to improve the accuracy and efficiency of DNNs. For example, the transfer of knowledge from related spatial-temporal datasets within or across the different CPS domains would be beneficial for improving ML model efficiency and supporting the CPS co-design initiative.
- Strict Performance Assurance for CPS: Most models that handle spatial-temporal data in CPS are highly complex, combining two or more DNNs for a given task (CNN-LSTM, GCN-GTN, etc.). This calls for the use of multiple layers and many parameters, leading to a longer training time and hindering real-time performance in practice. In a nutshell, the computational complexity, which translates to communication delays, and the dynamic nature of CPS data are among the factors hindering the achievement of real-time performance in various CPS domains. This calls for the design of new efficient model architectures that require few parameters to handle CPS spatial-temporal data.The targeted model architectures can significantly reduce the computational requirements and memory footprint of DNN models, making them more suitable for real-time tasks. Such architectures can include lightweight models, such as MobileNet and ShuffleNet, with smaller parameters that can be executed on CPS-resource-constrained devices. Alternatively, using specialized hardware, such as field-programmable gate arrays, can further optimize the execution of DNN models. Furthermore, the targeted model architectures can enable the deployment of DNN models in edge devices (sensors, actuators, smart cameras, etc.), which can process data locally within the network edge to reduce communication latency with the cloud. This can be critical for CPS applications, which require real-time decision-making and control. Similarly, developing and using continuous learning techniques that can adapt to the changing CPS data in real time can improve the performance, accuracy, and reliability of DNN models as well.
- Reliability, Safety, and Security Resilience Insurance for DNNS and CPS: Reliability entails predicting, detecting, and mitigating failures, while safety guarantees the system by dealing with unexpected failures. Security resilience entails preventing security threats posed by adversaries. As for reliability and safety, CPS could fail due to hardware or software faults resulting in inconsistent spatial-temporal data, which might lead the DNN models to make incorrect predictions or even shut down the system. There is a need for models that adopt spatial-temporal data to predict, detect, and mitigate hardware and software failures in CPS. Similarly, methods for evaluating the reliability and availability of DNN models and systems, such as reliability metrics and failure analysis, are critical too. Developing strategies for implementing fault-tolerant techniques and self-healing CPS cost-effectively and efficiently is critical for the predictive maintenance of CPS.On the other hand, data breaches and theft can compromise the confidentiality and integrity of spatial-temporal data in CPS. Furthermore, threats can lead the models to make incorrect predictions. In addition, malware and other cyberattacks can infect CPS and disrupt its regular operations. There is a need for strategies to predict, detect, and prevent attacks (defensive distillation, adversarial training, etc.). Additionally, introducing methods to ensure the privacy and confidentiality of spatial-temporal data in CPS (such as access control, encryption, and privacy-preserving machine learning techniques) is necessary. Finally, procedures for detecting and mitigating malware and other cyberattacks on CPS systems (e.g., intrusion detection and network segmentation) shall be considered as well.
6. Final Remarks
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lee, E.A. Cyber physical systems: Design challenges. In Proceedings of the 2008 11th IEEE international symposium on object and component-oriented real-time distributed computing (ISORC), Orlando, FL, USA, 5–7 May 2008; pp. 363–369. [Google Scholar]
- Xu, H.; Liang, F.; Yu, W. Internet of Things: Architecture, Key Applications, and Security Impacts. In Encyclopedia of Wireless Networks; Springer: Cham, Switzerland, 2020; pp. 672–681. [Google Scholar]
- Lin, J.; Yu, W.; Zhang, N.; Yang, X.; Zhang, H.; Zhao, W. A Survey on Internet of Things: Architecture, Enabling Technologies, Security and Privacy, and Applications. IEEE Internet Things J. 2017, 4, 1125–1142. [Google Scholar] [CrossRef]
- Mitchell, R.; Chen, I.R. A survey of intrusion detection techniques for cyber-physical systems. ACM Comput. Surv. (CSUR) 2014, 46, 1–29. [Google Scholar] [CrossRef]
- Liu, X.; Qian, C.; Hatcher, W.G.; Xu, H.; Liao, W.; Yu, W. Secure Internet of Things (IoT)-based smart-world critical infrastructures: Survey, case study and research opportunities. IEEE Access 2019, 7, 79523–79544. [Google Scholar] [CrossRef]
- Zahran, B.; Hussaini, A.; Ali-Gombe, A. IIoT-ARAS: IIoT/ICS Automated risk assessment system for prediction and prevention. In Proceedings of the Eleventh ACM Conference on Data and Application Security and Privacy, Virtual Event, 26–28 April 2021; pp. 305–307. [Google Scholar]
- Ramasamy, L.K.; Khan, F.; Shah, M.; Prasad, B.V.V.S.; Iwendi, C.; Biamba, C. Secure smart wearable computing through artificial intelligence-enabled internet of things and cyber-physical systems for health monitoring. Sensors 2022, 22, 1076. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.D.; Ma, M. PhysiQ: Off-site Quality Assessment of Exercise in Physical Therapy. Proc. Acm Interact. Mob. Wearable Ubiquitous Technol. 2023, 6, 1–25. [Google Scholar] [CrossRef]
- Tan, Y.; Vuran, M.C.; Goddard, S. Spatio-temporal event model for cyber-physical systems. In Proceedings of the 2009 29th IEEE International Conference on Distributed Computing Systems Workshops, Montreal, QC, Canada, 22–26 June 2009; pp. 44–50. [Google Scholar]
- Mohammadi, M.; Al-Fuqaha, A.; Sorour, S.; Guizani, M. Deep learning for IoT big data and streaming analytics: A survey. IEEE Commun. Surv. Tutor. 2018, 20, 2923–2960. [Google Scholar] [CrossRef]
- Liu, X.; Xu, H.; Liao, W.; Yu, W. Reinforcement learning for cyber-physical systems. In Proceedings of the 2019 IEEE International Conference on Industrial Internet (ICII), Orlando, FL, USA, 1–12 November 2019; pp. 318–327. [Google Scholar]
- Iqbal, R.; Doctor, F.; More, B.; Mahmud, S.; Yousuf, U. Big Data analytics and Computational Intelligence for Cyber–Physical Systems: Recent trends and state of the art applications. Future Gener. Comput. Syst. 2020, 105, 766–778. [Google Scholar] [CrossRef]
- Hao, W.; Yang, T.; Yang, Q. Hybrid statistical-machine learning for real-time anomaly detection in industrial cyber-physical systems. IEEE Trans. Autom. Sci. Eng. 2021, 20, 32–46. [Google Scholar] [CrossRef]
- Chaojun, G.; Yang, D.; Jirutitijaroen, P.; Walsh, W.M.; Reindl, T. Spatial load forecasting with communication failure using time-forward kriging. IEEE Trans. Power Syst. 2014, 29, 2875–2882. [Google Scholar] [CrossRef]
- Mardia, K.V.; Goodall, C.; Redfern, E.J.; Alonso, F.J. The kriged Kalman filter. Test 1998, 7, 217–282. [Google Scholar] [CrossRef]
- Tien Bui, D.; Tuan, T.A.; Klempe, H.; Pradhan, B.; Revhaug, I. Spatial prediction models for shallow landslide hazards: A comparative assessment of the efficacy of support vector machines, artificial neural networks, kernel logistic regression, and logistic model tree. Landslides 2016, 13, 361–378. [Google Scholar] [CrossRef]
- Ge, X.; Shi, L.; Fu, Y.; Muyeen, S.; Zhang, Z.; He, H. Data-driven spatial-temporal prediction of electric vehicle load profile considering charging behavior. Electr. Power Syst. Res. 2020, 187, 106469. [Google Scholar] [CrossRef]
- Hamdi, A.; Shaban, K.; Erradi, A.; Mohamed, A.; Rumi, S.K.; Salim, F.D. Spatiotemporal data mining: A survey on challenges and open problems. Artif. Intell. Rev. 2022, 55, 1441–1488. [Google Scholar] [CrossRef] [PubMed]
- Du, P.; Bai, X.; Tan, K.; Xue, Z.; Samat, A.; Xia, J.; Li, E.; Su, H.; Liu, W. Advances of four machine learning methods for spatial data handling: A review. J. Geovis. Spat. Anal. 2020, 4, 1–25. [Google Scholar] [CrossRef]
- Nikparvar, B.; Thill, J.C. Machine learning of spatial data. ISPRS Int. J. Geo-Inf. 2021, 10, 600. [Google Scholar] [CrossRef]
- Bao, Y.; Huang, J.; Shen, Q.; Cao, Y.; Ding, W.; Shi, Z.; Shi, Q. Spatial–Temporal Complex Graph Convolution Network for Traffic Flow Prediction. Eng. Appl. Artif. Intell. 2023, 121, 106044. [Google Scholar] [CrossRef]
- Wang, S.; Cao, J.; Yu, P. Deep learning for spatio-temporal data mining: A survey. IEEE Trans. Knowl. Data Eng. 2020, 34, 3681–3700. [Google Scholar] [CrossRef]
- Bai, M.; Lin, Y.; Ma, M.; Wang, P.; Duan, L. PrePCT: Traffic congestion prediction in smart cities with relative position congestion tensor. Neurocomputing 2021, 444, 147–157. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, M.; Chen, J.; Qu, T.; Huang, G.Q. Digital twin-enabled dynamic spatial-temporal knowledge graph for production logistics resource allocation. Comput. Ind. Eng. 2022, 171, 108454. [Google Scholar] [CrossRef]
- Li, S.; Liu, J.; Pan, Z.; Lv, S.; Si, S.; Sun, L. Anomaly Detection based on Robust Spatial-temporal Modeling for Industrial Control Systems. In Proceedings of the 2022 IEEE 19th International Conference on Mobile Ad Hoc and Smart Systems (MASS), Denver, CO, USA, 19–23 October 2022; pp. 355–363. [Google Scholar]
- Zahran, B.; Hussaini, A.; Ali-Gombe, A. Security of IT/OT Convergence: Design and Implementation Challenges. arXiv 2023, arXiv:2302.09426. [Google Scholar]
- Alwan, A.A.; Ciupala, M.A.; Brimicombe, A.J.; Ghorashi, S.A.; Baravalle, A.; Falcarin, P. Data quality challenges in large-scale cyber-physical systems: A systematic review. Inf. Syst. 2022, 105, 101951. [Google Scholar]
- Luo, Y.; Xiao, Y.; Cheng, L.; Peng, G.; Yao, D. Deep learning-based anomaly detection in cyber-physical systems: Progress and opportunities. ACM Comput. Surv. (CSUR) 2021, 54, 1–36. [Google Scholar] [CrossRef]
- Iqbal, R.; Maniak, T.; Doctor, F.; Karyotis, C. Fault detection and isolation in industrial processes using deep learning approaches. IEEE Trans. Ind. Inform. 2019, 15, 3077–3084. [Google Scholar] [CrossRef]
- Cinar, E.; Kalay, S.; Saricicek, I. A Predictive Maintenance System Design and Implementation for Intelligent Manufacturing. Machines 2022, 10, 1006. [Google Scholar] [CrossRef]
- Castano, F.; Cruz, Y.J.; Villalonga, A.; Haber, R.E. Data-driven insights on time-to-failure of electromechanical manufacturing devices: A procedure and case study. IEEE Trans. Ind. Inform. 2022, 19, 7190–7200. [Google Scholar] [CrossRef]
- Ghasemkhani, B.; Aktas, O.; Birant, D. Balanced K-Star: An Explainable Machine Learning Method for Internet-of-Things-Enabled Predictive Maintenance in Manufacturing. Machines 2023, 11, 322. [Google Scholar] [CrossRef]
- Ding, C.; Sun, S.; Zhao, J. MST-GAT: A multimodal spatial–temporal graph attention network for time series anomaly detection. Inf. Fusion 2023, 89, 527–536. [Google Scholar]
- Wu, W.; Shen, L.; Zhao, Z.; Li, M.; Huang, G.Q. Industrial IoT and long short-term memory network enabled genetic indoor tracking for factory logistics. IEEE Trans. Ind. Inform. 2022, 18, 7537–7548. [Google Scholar] [CrossRef]
- Cruz, Y.J.; Rivas, M.; Quiza, R.; Haber, R.E.; Castaño, F.; Villalonga, A. A two-step machine learning approach for dynamic model selection: A case study on a micro milling process. Comput. Ind. 2022, 143, 103764. [Google Scholar]
- Kim, T.Y.; Cho, S.B. Predicting residential energy consumption using CNN-LSTM neural networks. Energy 2019, 182, 72–81. [Google Scholar] [CrossRef]
- Zhou, J.; Dai, H.N.; Wang, H.; Wang, T. Wide-attention and deep-composite model for traffic flow prediction in transportation cyber–physical systems. IEEE Trans. Ind. Inform. 2020, 17, 3431–3440. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, X.; Zhang, H.; Cao, Y.; Terzija, V. Review on deep learning applications in frequency analysis and control of modern power system. Int. J. Electr. Power Energy Syst. 2022, 136, 107744. [Google Scholar] [CrossRef]
- Carvalho, T.P.; Soares, F.A.; Vita, R.; Francisco, R.d.P.; Basto, J.P.; Alcalá, S.G. A systematic literature review of machine learning methods applied to predictive maintenance. Comput. Ind. Eng. 2019, 137, 106024. [Google Scholar] [CrossRef]
- Rowe, F. What literature review is not: Diversity, boundaries and recommendations. Eur. J. Inf. Syst. 2014, 23, 241–255. [Google Scholar] [CrossRef]
- Hatcher, W.G.; Yu, W. A survey of deep learning: Platforms, applications and emerging research trends. IEEE Access 2018, 6, 24411–24432. [Google Scholar] [CrossRef]
- Liang, F.; Yu, W.; Liu, X.; Griffith, D.; Golmie, N. Toward Edge-Based Deep Learning in Industrial Internet of Things. IEEE Internet Things J. 2020, 7, 4329–4341. [Google Scholar] [CrossRef]
- Xu, H.; Liu, X.; Yu, W.; Griffith, D.; Golmie, N. Reinforcement Learning-Based Control and Networking Co-Design for Industrial Internet of Things. IEEE J. Sel. Areas Commun. 2020, 38, 885–898. [Google Scholar] [CrossRef]
- Gao, N.; Xue, H.; Shao, W.; Zhao, S.; Qin, K.K.; Prabowo, A.; Rahaman, M.S.; Salim, F.D. Generative adversarial networks for spatio-temporal data: A survey. ACM Trans. Intell. Syst. Technol. (TIST) 2022, 13, 1–25. [Google Scholar] [CrossRef]
- Chen, F.; Chen, J.; Huang, W.; Chen, S.; Huang, X.; Jin, L.; Jia, J.; Zhang, X.; An, C.; Zhang, J.; et al. Westerlies Asia and monsoonal Asia: Spatiotemporal differences in climate change and possible mechanisms on decadal to sub-orbital timescales. Earth-Sci. Rev. 2019, 192, 337–354. [Google Scholar] [CrossRef]
- Shao, W.; Salim, F.D.; Gu, T.; Dinh, N.T.; Chan, J. Traveling officer problem: Managing car parking violations efficiently using sensor data. IEEE Internet Things J. 2017, 5, 802–810. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Cai, Y.D.; Lu, Q.; Koric, S.; Shao, C. Hierarchical measurement strategy for cost-effective interpolation of spatiotemporal data in manufacturing. J. Manuf. Syst. 2019, 53, 159–168. [Google Scholar] [CrossRef]
- Feng, S.; Fan, F. Developing an Enhanced Ecological Evaluation Index (EEEI) Based on Remotely Sensed Data and Assessing Spatiotemporal Ecological Quality in Guangdong–Hong Kong–Macau Greater Bay Area, China. Remote Sens. 2022, 14, 2852. [Google Scholar] [CrossRef]
- Kupilik, M.; Witmer, F. Spatio-temporal violent event prediction using Gaussian process regression. J. Comput. Soc. Sci. 2018, 1, 437–451. [Google Scholar] [CrossRef]
- Rumi, S.K.; Salim, F.D. Modelling regional crime risk using directed graph of check-ins. In Proceedings of the 29th ACM International Conference on Information & Knowledge Management, Virtual Event, 19–23 October 2020; pp. 2201–2204. [Google Scholar]
- Pan, Z.; Liang, Y.; Wang, W.; Yu, Y.; Zheng, Y.; Zhang, J. Urban traffic prediction from spatio-temporal data using deep meta learning. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 1720–1730. [Google Scholar]
- Heikinheimo, V.; Di Minin, E.; Tenkanen, H.; Hausmann, A.; Erkkonen, J.; Toivonen, T. User-generated geographic information for visitor monitoring in a national park: A comparison of social media data and visitor survey. ISPRS Int. J. Geo-Inf. 2017, 6, 85. [Google Scholar] [CrossRef]
- Lin, J.; Yu, W.; Yang, X.; Yang, Q.; Fu, X.; Zhao, W. A Novel Dynamic En-Route Decision Real-Time Route Guidance Scheme in Intelligent Transportation Systems. In Proceedings of the 2015 IEEE 35th International Conference on Distributed Computing Systems, Columbus, OH, USA, 29 June–2 July 2015; pp. 61–72. [Google Scholar] [CrossRef]
- Liang, F.; Qian, C.; Yu, W.; Griffith, D.; Golmie, N. Survey of Graph Neural Networks and Applications. Wirel. Commun. Mob. Comput. 2022, 2022, 9261537. [Google Scholar] [CrossRef]
- Guo, G.; Yuan, W. Short-term traffic speed forecasting based on graph attention temporal convolutional networks. Neurocomputing 2020, 410, 387–393. [Google Scholar] [CrossRef]
- Ma, X.; Zhong, H.; Li, Y.; Ma, J.; Cui, Z.; Wang, Y. Forecasting transportation network speed using deep capsule networks with nested LSTM models. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4813–4824. [Google Scholar] [CrossRef]
- Yan, B.; Wang, G.; Yu, J.; Jin, X.; Zhang, H. Spatial-temporal chebyshev graph neural network for traffic flow prediction in iot-based its. IEEE Internet Things J. 2021, 9, 9266–9279. [Google Scholar] [CrossRef]
- Han, L.; Du, B.; Sun, L.; Fu, Y.; Lv, Y.; Xiong, H. Dynamic and multi-faceted spatio-temporal deep learning for traffic speed forecasting. In Proceedings of the 27th ACM SIGKDD conference on Knowledge Discovery & Data Mining, Virtual Event, 14–18 August 2021; pp. 547–555. [Google Scholar]
- Tian, C.; Chan, W.K. Spatial-temporal attention wavenet: A deep learning framework for traffic prediction considering spatial-temporal dependencies. IET Intell. Transp. Syst. 2021, 15, 549–561. [Google Scholar] [CrossRef]
- Li, W.; Wang, X.; Zhang, Y.; Wu, Q. Traffic flow prediction over muti-sensor data correlation with graph convolution network. Neurocomputing 2021, 427, 50–63. [Google Scholar] [CrossRef]
- Lin, L.; Li, W.; Zhu, L. Network-wide multi-step traffic volume prediction using graph convolutional gated recurrent neural network. arXiv 2021, arXiv:2111.11337. [Google Scholar]
- Cai, K.; Li, Y.; Fang, Y.P.; Zhu, Y. A deep learning approach for flight delay prediction through time-evolving graphs. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11397–11407. [Google Scholar] [CrossRef]
- Peng, H.; Du, B.; Liu, M.; Liu, M.; Ji, S.; Wang, S.; Zhang, X.; He, L. Dynamic graph convolutional network for long-term traffic flow prediction with reinforcement learning. Inf. Sci. 2021, 578, 401–416. [Google Scholar] [CrossRef]
- Kong, X.; Zhu, B.; Shen, G.; Workneh, T.C.; Ji, Z.; Chen, Y.; Liu, Z. Spatial-temporal-cost combination based taxi driving fraud detection for collaborative internet of vehicles. IEEE Trans. Ind. Inform. 2021, 18, 3426–3436. [Google Scholar] [CrossRef]
- Karim, M.M.; Li, Y.; Qin, R.; Yin, Z. A Dynamic Spatial-Temporal Attention Network for Early Anticipation of Traffic Accidents. IEEE Trans. Intell. Transp. Syst. 2022, 23, 9590–9600. [Google Scholar] [CrossRef]
- Diao, C.; Zhang, D.; Liang, W.; Li, K.C.; Hong, Y.; Gaudiot, J.L. A Novel Spatial-Temporal Multi-Scale Alignment Graph Neural Network Security Model for Vehicles Prediction. IEEE Trans. Intell. Transp. Syst. 2022, 24, 904–914. [Google Scholar] [CrossRef]
- Chen, D.; Lv, Z. Artificial intelligence enabled Digital Twins for training autonomous cars. Internet Things Cyber-Phys. Syst. 2022, 2, 31–41. [Google Scholar] [CrossRef]
- Liang, W.; Li, Y.; Xie, K.; Zhang, D.; Li, K.C.; Souri, A.; Li, K. Spatial-temporal aware inductive graph neural network for C-ITS data recovery. IEEE Trans. Intell. Transp. Syst. 2022, 2022, 1–12. [Google Scholar] [CrossRef]
- Kong, X.; Zhou, W.; Shen, G.; Zhang, W.; Liu, N.; Yang, Y. Dynamic graph convolutional recurrent imputation network for spatiotemporal traffic missing data. Knowl.-Based Syst. 2023, 261, 110188. [Google Scholar] [CrossRef]
- Malawade, A.V.; Yu, S.Y.; Hsu, B.; Muthirayan, D.; Khargonekar, P.P.; Al Faruque, M.A. Spatiotemporal scene-graph embedding for autonomous vehicle collision prediction. IEEE Internet Things J. 2022, 9, 9379–9388. [Google Scholar] [CrossRef]
- Sun, B.; Zhao, D.; Shi, X.; He, Y. Modeling global spatial–temporal graph attention network for traffic prediction. IEEE Access 2021, 9, 8581–8594. [Google Scholar] [CrossRef]
- Yang, J.; Yue, Z. Learning Hierarchical Spatial-Temporal Graph Representations for Robust Multivariate Industrial Anomaly Detection. IEEE Trans. Ind. Inform. 2022, 2022, 1–12. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, Z.; Zhang, S.; Jung, U. Identification of abnormal processes with spatial-temporal data using convolutional neural networks. Processes 2020, 8, 73. [Google Scholar] [CrossRef]
- Li, T.; Zhao, Z.; Sun, C.; Yan, R.; Chen, X. Hierarchical attention graph convolutional network to fuse multi-sensor signals for remaining useful life prediction. Reliab. Eng. Syst. Saf. 2021, 215, 107878. [Google Scholar] [CrossRef]
- Yang, C.; Zhou, K.; Liu, J. SuperGraph: Spatial-temporal graph-based feature extraction for rotating machinery diagnosis. IEEE Trans. Ind. Electron. 2021, 69, 4167–4176. [Google Scholar] [CrossRef]
- Zhang, X.; Long, Z.; Peng, J.; Wu, G.; Hu, H.; Lyu, M.; Qin, G.; Song, D. Fault Prediction for Electromechanical Equipment Based on Spatial-Temporal Graph Information. IEEE Trans. Ind. Inform. 2022, 19, 1413–1424. [Google Scholar] [CrossRef]
- Shcherbakov, M.; Sai, C. A hybrid deep learning framework for intelligent predictive maintenance of Cyber-Physical Systems. ACM Trans. Cyber-Phys. Syst. (TCPS) 2022, 6, 1–22. [Google Scholar] [CrossRef]
- Xiong, Q.; Zhang, J.; Wang, P.; Liu, D.; Gao, R.X. Transferable two-stream convolutional neural network for human action recognition. J. Manuf. Syst. 2020, 56, 605–614. [Google Scholar] [CrossRef]
- Zheng, T.; Liu, C.; Liu, B.; Wang, M.; Li, Y.; Wang, P.; Qin, X.; Guo, Y. Scene recognition model in underground mines based on CNN-LSTM and spatial-temporal attention mechanism. In Proceedings of the 2020 International Symposium on Computer, Consumer and Control (IS3C), Taichung City, Taiwan, 13–16 November 2020; pp. 513–516. [Google Scholar]
- Jia, M.; Xu, D.; Yang, T.; Liu, Y.; Yao, Y. Graph convolutional network soft sensor for process quality prediction. J. Process Control 2023, 123, 12–25. [Google Scholar] [CrossRef]
- Li, X.; Yi, X.; Liu, Z.; Liu, H.; Chen, T.; Niu, G.; Yan, B.; Chen, C.; Huang, M.; Ying, G. Application of novel hybrid deep leaning model for cleaner production in a paper industrial wastewater treatment system. J. Clean. Prod. 2021, 294, 126343. [Google Scholar] [CrossRef]
- Guo, J.; Han, M.; Zhan, G.; Liu, S. A Spatio-Temporal Deep Learning Network for the Short-Term Energy Consumption Prediction of Multiple Nodes in Manufacturing Systems. Processes 2022, 10, 476. [Google Scholar] [CrossRef]
- Bampoula, X.; Siaterlis, G.; Nikolakis, N.; Alexopoulos, K. A deep learning model for predictive maintenance in cyber-physical production systems using lstm autoencoders. Sensors 2021, 21, 972. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Hui, Q.; Xie, W.; Wan, S.; Zhou, Y.; Pei, Q. Convolutional Neural Networks for forecasting flood process in Internet-of-Things enabled smart city. Comput. Netw. 2021, 186, 107744. [Google Scholar] [CrossRef]
- Jiang, Y.; Niu, S.; Zhang, K.; Chen, B.; Xu, C.; Liu, D.; Song, H. Spatial-temporal graph data mining for iot-enabled air mobility prediction. IEEE Internet Things J. 2021, 9, 9232–9240. [Google Scholar] [CrossRef]
- Pan, J. Physical Integrity Attack Detection of Surveillance Camera with Deep Learning based Video Frame Interpolation. In Proceedings of the 2019 IEEE International Conference on Internet of Things and Intelligence System (IoTaIS), Bali, Indonesia, 5–7 November 2019; pp. 79–85. [Google Scholar]
- Zhang, T.; Wang, Z.; Zeng, Y.; Wu, X.; Huang, X.; Xiao, F. Building Artificial-Intelligence Digital Fire (AID-Fire) system: A real-scale demonstration. J. Build. Eng. 2022, 62, 105363. [Google Scholar] [CrossRef]
- Pan, X.; Gao, X.; Wang, H.; Zhang, W.; Mu, Y.; He, X. Temporal-based Swin Transformer network for workflow recognition of surgical video. Int. J. Comput. Assist. Radiol. Surg. 2023, 18, 139–147. [Google Scholar] [CrossRef]
- Ge, W.; Huh, J.W.; Park, Y.R.; Lee, J.H.; Kim, Y.H.; Zhou, G.; Turchin, A. Using deep learning with attention mechanism for identification of novel temporal data patterns for prediction of ICU mortality. Inform. Med. Unlocked 2022, 29, 100875. [Google Scholar] [CrossRef]
| Ref, Year | Framework | Gap | Contribution |
|---|---|---|---|
| [23], 2021 | ConvLSTM | Traffic jam forecasting models were location specific | Created a model that covers the entire smart city |
| [37], 2020 | CNN-LSTM | Traffic forecasting models were vehicle-type based | Proposed a generalized model applicable to all smart vehicles |
| [55], 2020 | GATCN | Inaccurate prediction of spatial-temporal features from traffic data | An improved prediction of the hidden spatial-temporal features that lies in the data |
| [57], 2021 | ChebNet-LSTM | Inadequate accuracy, deficient adaptability and inferior real-time | Proposed an enhanced real-time, adaptable prediction scheme |
| [58], 2021 | DGNN | Previous models were built based on static adjacency matrix | Proposed a dynamic graph construction method |
| [59], 2021 | STAWnet | Previous models were built based on the static dependency within the predefined structure | Designed a self attentive model that requires no prior knowledge of the graph topology |
| [61], 2021 | GCGRNN | CNN models are inefficient in handling structure-varying data | Proposed a graph convolution approach that is independent of a predefined adjacency matrix |
| [62], 2021 | GCN | Previous models were single airport specific | Proposed a flight delay prediction of airport networks framework |
| [63], 2021 | GCN-LSTM | Previous models were static graphs based | Addressed data defects problems caused by the static graphs |
| [64], 2021 | GNNs | Current methods were not security driven | Designed a taxi driving fraud detection system |
| [71], 2021 | GST-GAT | Previous methods neglects the non-Euclidean nature of the road network | an improved dynamic spatial-temporal correlation method that captures the relevant characteristics of the traffic network |
| [65], 2022 | DSTA | Conventional methods neglects the spatial-temporal features that exist in the data | Proposed Dashcams video data to predict/detect accidents |
| [66], 2022 | CRFAST-GCN | Traditional forecasting methods neglects the semantic similarity between traffic nodes that degrades accuracy | Designed a model that extracts long and short-term dependencies, semantic similarity, and periodicity |
| [67], 2022 | CNN-DT | Current accidents prediction methods do not operate in real-time | Presented digital-twins AI-enabled autonomous cars prediction model |
| [68], 2022 | STAR | Imputing the missing entries in spatial-temporal traffic data is challenging | addressed the transport data corruption problem in real-time |
| [70], 2022 | SG2VEC | Traditional collision prediction methods were expensive | Proposed an improved future autonomous vehicles accidents prediction method |
| [69], 2023 | DGCRIN | Missing data imputation methods do not account for the dynamic spatial dependencies of the road network over time and the effective utilization of the diverse data | Designed an improved dynamic imputation method |
| Research Objectives | Research Papers |
|---|---|
| < (Industrial-Real-time Decisions), > | [34] |
| < (Industrial-Resource Allocation), > | [24] |
| < (Industrial-Anomaly Detection), > | [25,72,73] |
| < (Industrial-Predictive Maintenance)> | [74,75,76] |
| < (Industrial-Data Processing)> | N/A (No much research conducted in this direction) |
| < (Industrial-Multi-modal Data Fusion)> | N/A (No much research conducted in this direction) |
| Ref, Year | Framework | Gap | Contribution |
|---|---|---|---|
| [24], 2022 | DSTKG | The Dynamites of the operating environment makes the efficient allocation of production logistics challenging | Proposed a framework for the adequate allocation of smart production logistics |
| [73], 2020 | CNN | Abnormal manufacturing processes are not well examined | Extensible recognition framework for identifying abnormal manufacturing processes |
| [78], 2020 | CNN | Accurate prediction of the evolving human activities in Human-Robot-Collaboration (HRC) was challenging | Optical flow CNN-based transfer learning technique was leveraged to promote HRC in smart manufacturing system |
| [79], 2020 | CNN-LSTM | previous methods were inaccurate | An improved scene identification framework for underground coal mining |
| [74], 2021 | HAGCN | Machineries remaining useful life prediction models do not consider their operating environment | Considered the environment and its dynamic features for improved accuracy |
| [75], 2021 | SuperGraph | Achievement of a generic feature extraction method for vibration signals was challenging | Graph theory was found supportive and successfully applied for rotating machinery fault diagnosis |
| [83], 2021 | LSTM-Autoencoders | Data quality challenges and preventive maintenance strategies | Proposed predictive maintenance for steel industry production processes |
| [81], 2021 | CLSTMA | Effective feature extraction methods, data size and scalability challenges | An improved scheme for monitoring water quality in a wastewater treatment system |
| [82], 2022 | GCN-GRU | Early energy prediction of complex nodes in smart manufacturing systems remains a challenge | Framework for predicting energy consumption behaviour of multiple nodes concurrently |
| [34], 2022 | LSTM-GITA | Real-time monitoring of factory logistics is under-investigated | IIoT-DT based method of monitoring factory logistics |
| [25], 2022 | AD-RoSM | Accuracy problems for anomaly detection schemes in ICS | An improved anomaly detection method for ICS |
| [72], 2022 | HiSTAR | Spatial-temporal feature extraction was challenging for multivariate industrial anomaly detection schemes | A graph-theory concept was proposed for improved feature extraction and detection accuracy |
| [77], 2022 | CNN-LSTM | Health assessment of complex systems remains a challenge | A method for evaluating the heath status of smart CPS |
| [76], 2022 | Markov graph | Accuracy problems in predicting faults for electromechanical instruments | An improved scheme aims to stop fatal damage and reduce equipment maintenance costs |
| [80], 2023 | GCN | Compound and time-varying characteristics of the process industry are not well investigated | Graph theory was used to capture the inherent relationships among the affected variables for an improved accuracy |
| Research Objectives | Research Papers |
|---|---|
| <, (Other CPS-Data Processing), > | [84,85] |
| <, (Other CPS-Anomaly Detection), > | [86] |
| <, (Other CPS-Predictive Maintenance), > | N/A (No much research conducted in this direction) |
| <, (Other CPS-Resource Allocations)> | N/A (No much research conducted in this direction) |
| <, (Other CPS-Real-time Decisions), , > | [8,87,88] |
| <, (Other CPS-Multi-modal Data Fusion)> | N/A (No much research conducted in this direction) |
| Ref, Year | Framework | Gap | Contribution |
|---|---|---|---|
| [8], 2023 | PhysiQ | Lack of adequate and convenient methods of tracking exercises done off-site | Proposed a framework that tracks and assesses people’s off-site physical therapy exercises in real time using a smartwatch. |
| [86], 2019 | ConvLSTM | Integrity attacks against the physical configuration of cyber-physical devices are underinvestigated | Method of detecting threats against cyber-physical surveillance cameras |
| [84], 2021 | CNN | Both traditional and data-driven methods are inefficient for flood process forecasting | Proposed an effective method of flood process prediction |
| [85], 2021 | GNN | Previous methods neglected the propagation of traffic perturbations among airports | Air mobility prediction model for effective control and decision-making in the airport of things network |
| [87], 2022 | Conv-LSTM | Modern firefighting systems need to be integrated with the state-of-the-art technologies | Proposed a real-time fire identification system |
| [89], 2022 | RNN-LSTM | Methods for status monitoring and evaluating patients in ICUs neglect the temporal features of their operating environment | A method for determining the longitudinal variable patterns associated with the higher risk of medical ICU patient mortality. |
| S/NO | Performance | Security |
|---|---|---|
| 1 | Longer training time | Data Fidelity issue |
| 2 | High computational power | Attack on availability |
| 3 | Insufficient training data | Sensing data attack |
| 4 | Problem complexity | Cost of protocols deployment |
| 5 | Learning hyperparameter | PLC compromise |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Musa, A.A.; Hussaini, A.; Liao, W.; Liang, F.; Yu, W. Deep Neural Networks for Spatial-Temporal Cyber-Physical Systems: A Survey. Future Internet 2023, 15, 199. https://doi.org/10.3390/fi15060199
Musa AA, Hussaini A, Liao W, Liang F, Yu W. Deep Neural Networks for Spatial-Temporal Cyber-Physical Systems: A Survey. Future Internet. 2023; 15(6):199. https://doi.org/10.3390/fi15060199
Chicago/Turabian StyleMusa, Abubakar Ahmad, Adamu Hussaini, Weixian Liao, Fan Liang, and Wei Yu. 2023. "Deep Neural Networks for Spatial-Temporal Cyber-Physical Systems: A Survey" Future Internet 15, no. 6: 199. https://doi.org/10.3390/fi15060199
APA StyleMusa, A. A., Hussaini, A., Liao, W., Liang, F., & Yu, W. (2023). Deep Neural Networks for Spatial-Temporal Cyber-Physical Systems: A Survey. Future Internet, 15(6), 199. https://doi.org/10.3390/fi15060199