
Aspects of Foreign Object Detection in a Wireless Charging System for Electric Vehicles Using Passive Inductive Sensors


Abstract
:1. Introduction
- The magnetic field of the charging system is not homogeneous.
- The magnetic field of the charging system is much stronger than that of the foreign objects.
- Typically, differential sensors are used whose output signal represents the gradient of the magnetic field.
2. The Ground Assembly of the Used Charging System
2.1. Mechanical and Electrical Parameters
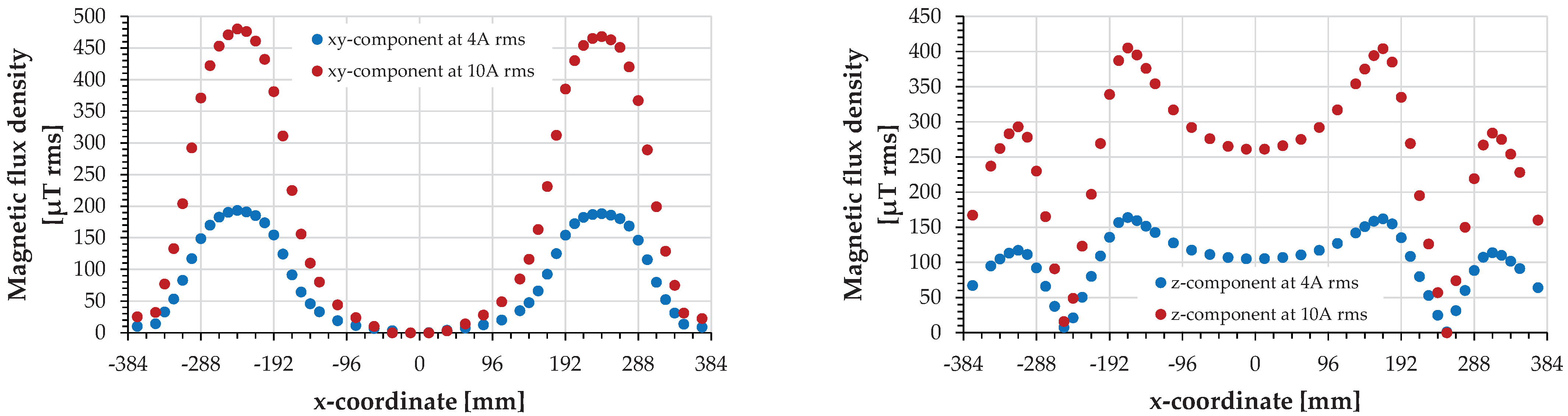
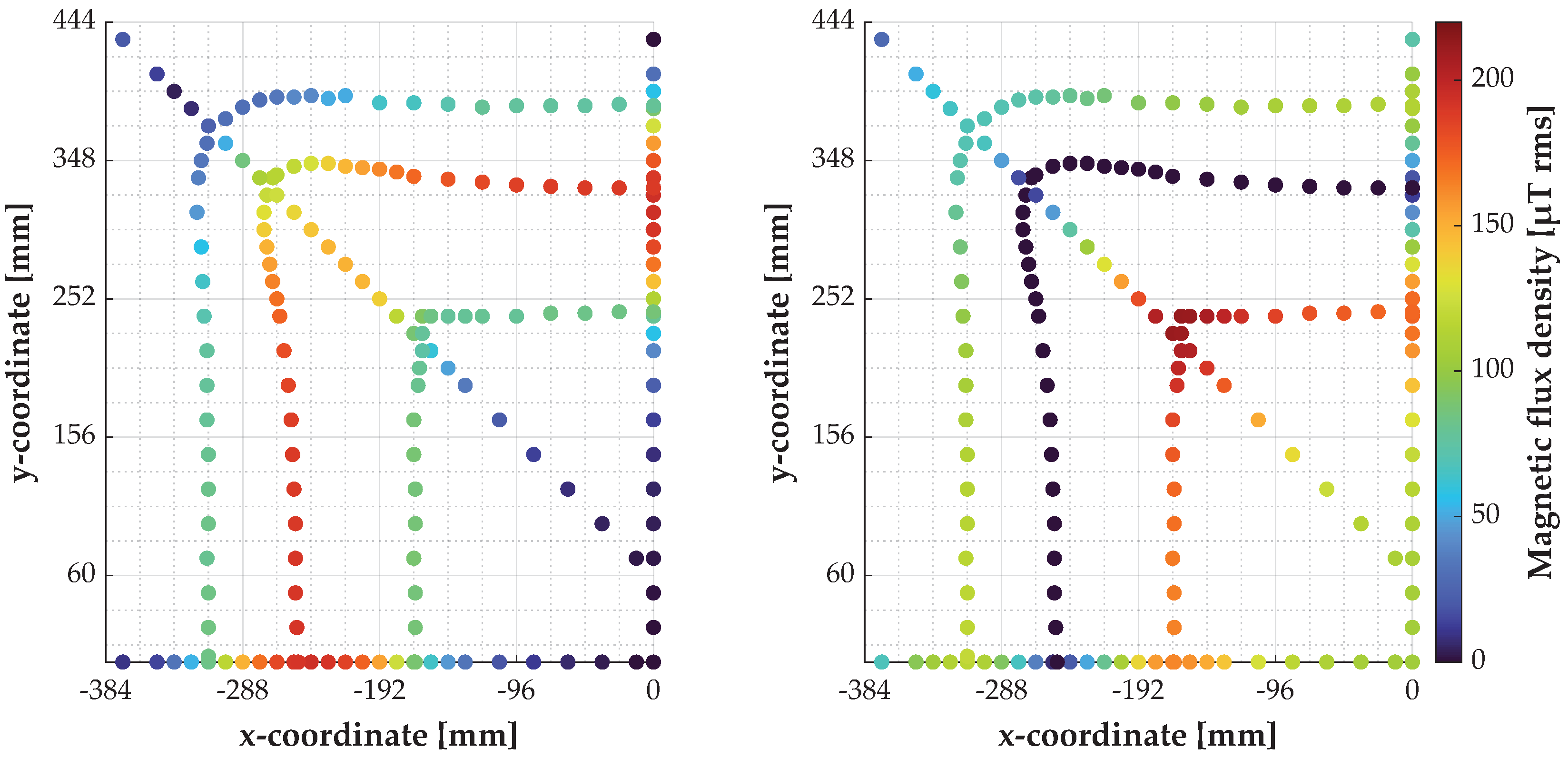
2.2. The Magnetic Field of the Ground Assembly
3. Metallic Foreign Objects in the Magnetic Field of the Ground Assembly
4. Sensor Coils for the Detection of Metallic Foreign Objects
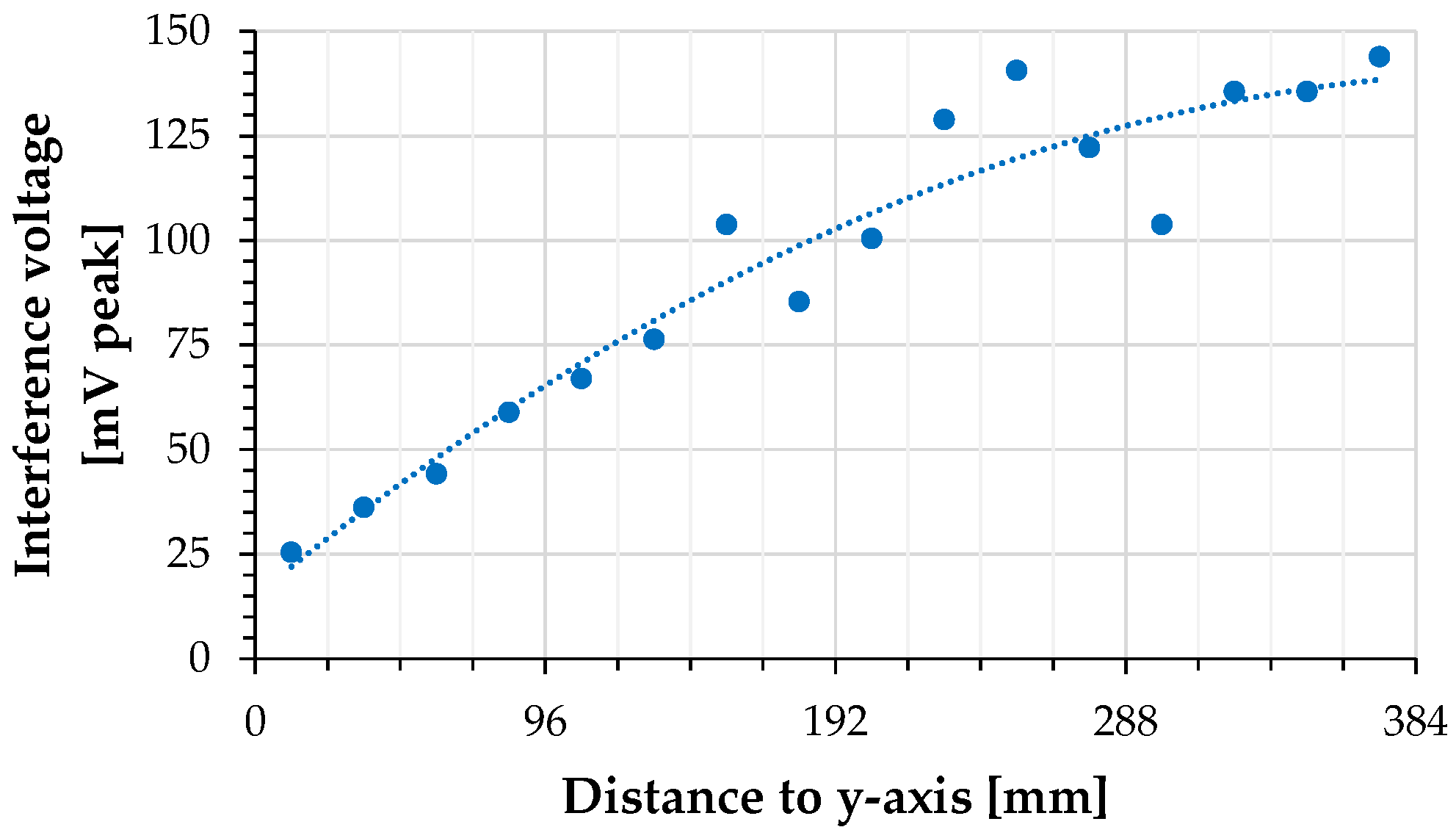
4.1. Signal Interference Due to Capacitive Coupling
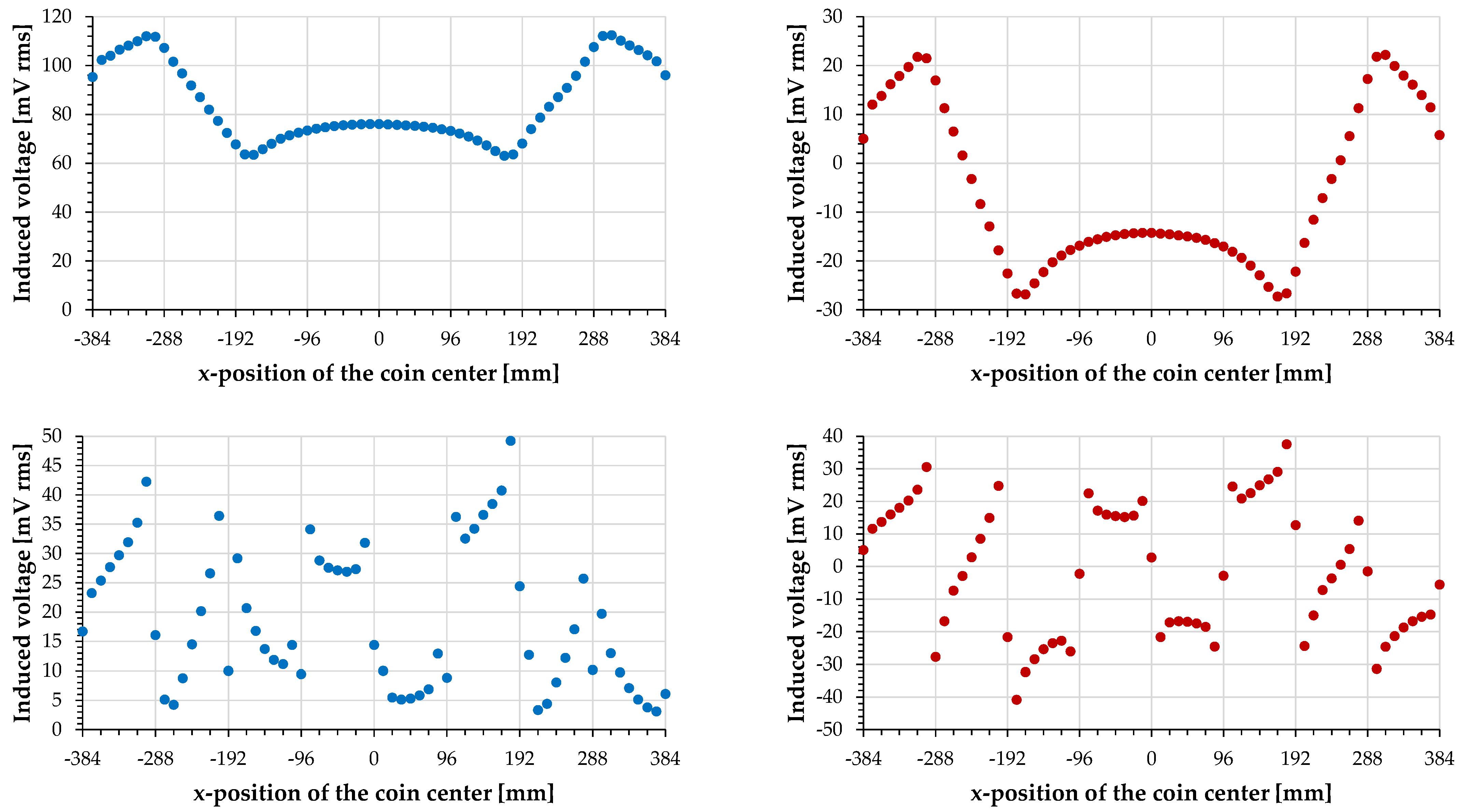
4.2. Influence of the Magnetic Field of the Ground Assembly on the Sensor Coils
4.3. Feedback Effects of Metallic Foreign Objects on the Sensor Coils
5. Discussion
5.1. The Magnetic Field of the Ground Assembly
5.2. Thermal Behavior of the Test Objects
- The measurement period was limited in time and thus apparently too short.
- The premature termination of the test of individual test objects if they have heated up very quickly and very strongly, such as the steel nail.
- The permanent emission of thermal energy of the test objects to their environment
5.3. Feedback Effects of Metallic Foreign Objects on the Sensor Coils
5.4. Improved Detectability of Foreign Objects by Using a Modified Sensor Coil
5.5. Improved Feedback Effects of Metallic Foreign Objects on the Sensor Coils
6. Conclusions
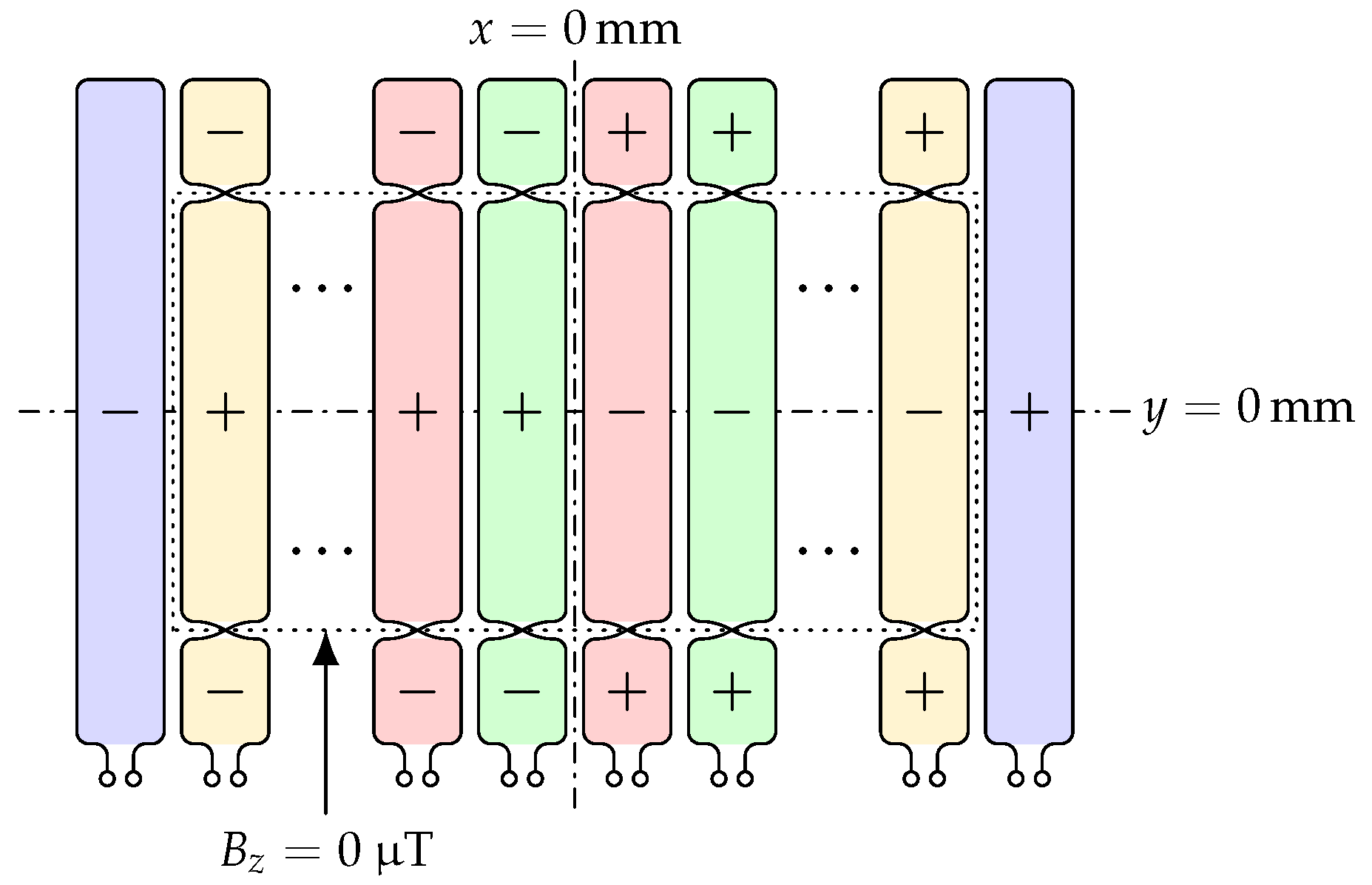
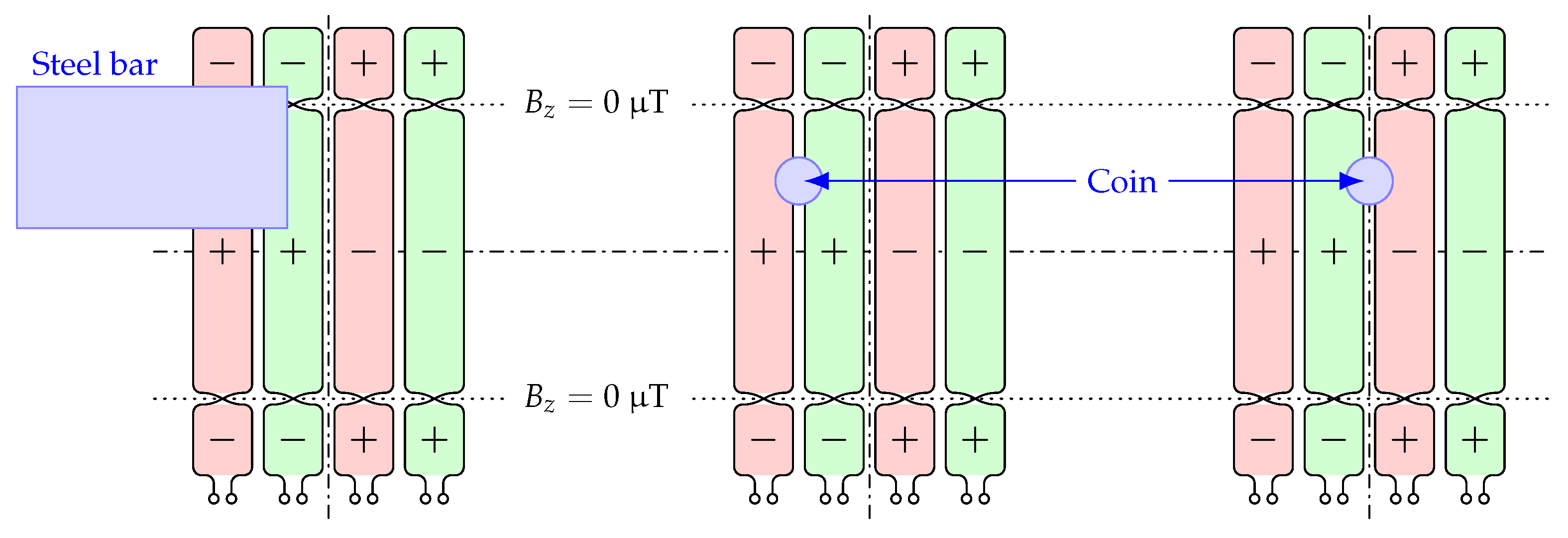
- The dependence on the magnetic field, and thus the difficulties in detecting metallic foreign objects at locations where the decisive field component—in this work, the z-component—takes the value zero
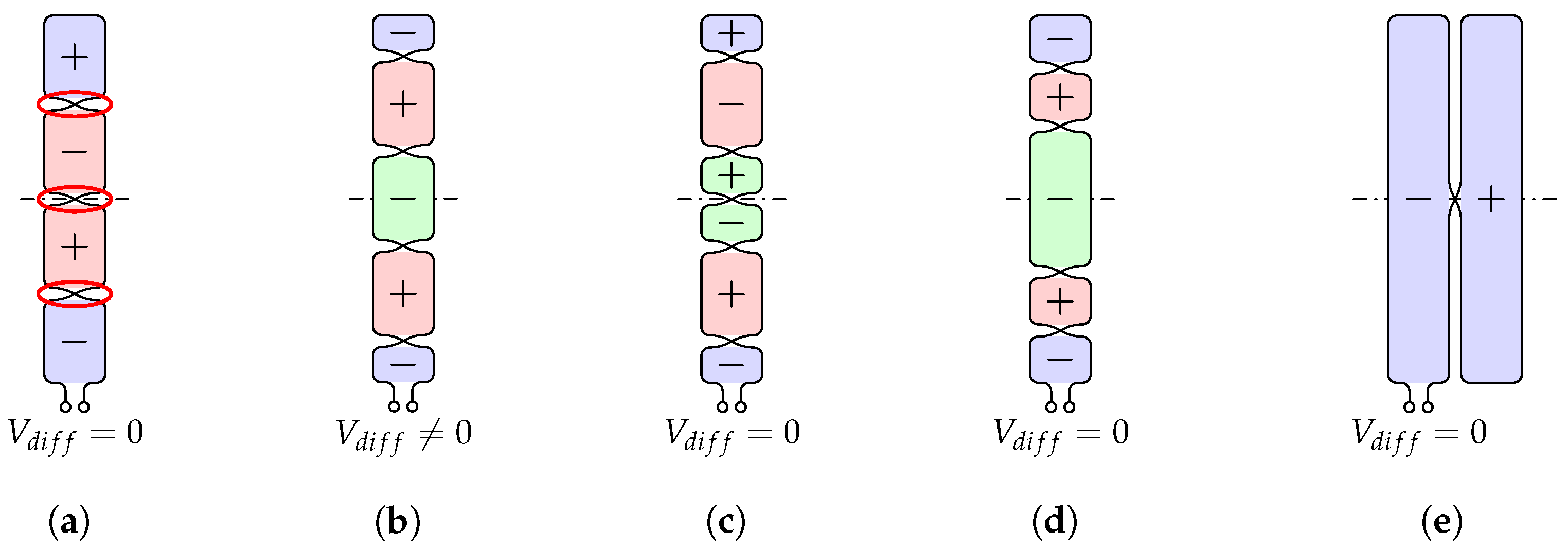
- The non-detectability of one or more foreign objects when they stimulate a sensor coil symmetrically
- The non-detectability of several foreign objects when they stimulate a sensor coil with the same intensity but in oposite directions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- SAE J2954:2020-10-20; Wireless Power Transfer for Light-Duty Plug-In/Electric Vehicles and Alignment Methodology. SAE International: Warrendale, PA, USA, 2020. [CrossRef]
- DIN EN IEC 61980-1:2021-09 VDE 0122-10-1:2021-09; Electric Vehicle Wireless Power Transfer (WPT) Systems—Part 1: General Requirements (IEC 61980-1:2020); German Version EN IEC 61980-1:2021. VDE: Frankfurt, Germany; DIN: Berlin, Germany, 2021.
- DIN CLC IEC/TS 61980-3:2021-10 VDE V 0122-10-3:2021-10; Electric Vehicle Wireless Power Transfer (WPT) Systems—Part 3: Specific Requirements for the Magnetic Field Wireless Power Transfer Systems (IEC/TS 61980-3:2019). German Version CLC IEC/TS 61980-3:2020. VDE: Frankfurt, Germany; DIN: Berlin, Germany, 2021.
- DIN EN ISO 19363:2021-02; Electrically Propelled Road Vehicles—Magnetic Field Wireless Power Transfer—Safety and Interoperability Requirements (ISO 19363:2020). English Version prEN ISO 19363:2020. DIN: Berlin, Germany, 2021.
- Zhang, X.; Jin, Y.; Yang, Q.; Yuan, Z.; Meng, H.; Wang, Z. Detection of Metal Obstacles in Wireless Charging System of Electric Vehicle. In Proceedings of the 2017 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Chongqing, China, 20–22 May 2017; pp. 89–92. [Google Scholar] [CrossRef]
- Wang, Y.C.; Chiang, C.W. Foreign Metal Detection by Coil Impedance for EV Wireless Charging System. In Proceedings of the EVS28 International Electric Vehicle Symposium Exhibition (KINTEX), Goyang, Republic of Korea, 3–6 May 2015. [Google Scholar]
- Kuyvenhoven, N.; Dean, C.; Melton, J.; Schwannecke, J.; Umenei, A.E. Development of a Foreign Object Detection and Analysis Method for Wireless Power Systems. In Proceedings of the 2011 IEEE Symposium on Product Compliance Engineering Proceedings, San Diego, CA, USA, 10–12 October 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, S.J.; Su, J.L.; Dai, S.H.; Tai, C.C.; Lee, T.S. Enhancement of Wireless Power Transmission with Foreign-Object Detection Considerations. In Proceedings of the 2017 IEEE 6th Global Conference on Consumer Electronics (GCCE), Nagoya, Japan, 24–27 October 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Jafari, H.; Moghaddami, M.; Sarwat, A.I. Foreign Object Detection in Inductive Charging Systems Based on Primary Side Measurements. IEEE Trans. Ind. Appl. 2019, 55, 6466–6475. [Google Scholar] [CrossRef]
- Deguchi, Y.; Nagai, S.; Fujita, T.; Fujimoto, H.; Hori, Y. Sensorless Metal Object Detection Using Transmission-Side Voltage Pulses in Standby Phase for Dynamic Wireless Power Transfer. In Proceedings of the 2021 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), San Diego, CA, USA, 1–4 June 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Moghaddami, M.; Sarwat, A.I. A Sensorless Conductive Foreign Object Detection for Inductive Electric Vehicle Charging Systems Based on Resonance Frequency Deviation. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting (IAS), Portland, OR, USA, 23–27 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Kudo, H.; Ogawa, K.; Oodachi, N.; Deguchi, N.; Shoki, H. Detection of a metal obstacle in wireless power transfer via magnetic resonance. In Proceedings of the 2011 IEEE 33rd International Telecommunications Energy Conference (INTELEC), Amsterdam, The Netherlands, 9–13 October 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Fukuda, S.; Nakano, H.; Murayama, Y.; Murakami, T.; Kozakai, O.; Fujimaki, K. A novel metal detector using the quality factor of the secondary coil for wireless power transfer systems. In Proceedings of the 2012 IEEE MTT-S International Microwave Workshop Series on Innovative Wireless Power Transmission: Technologies, Systems, and Applications, Kyoto, Japan, 10–11 May 2012; pp. 241–244. [Google Scholar] [CrossRef]
- Jafari, H.; Olowu, T.O.; Mahmoudi, M.; Sarwat, A. Design and Implementation of Estimating Algorithm for Foreign Object Location in Wireless Charging EV Systems. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 3167–3171. [Google Scholar] [CrossRef]
- Sun, Y.; Wei, G.; Song, K.; Huang, X.; Zhang, Q.; Zhu, C. Determination Foreign Object Detection Area in Electric Vehicle Wireless Charging System Based on Thermal Temperature Rise Characteristic. In Proceedings of the 2020 IEEE Transportation Electrification Conference Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 258–261. [Google Scholar] [CrossRef]
- Sonnenberg, T.; Stevens, A.; Dayerizadeh, A.; Lukic, S. Combined Foreign Object Detection and Live Object Protection in Wireless Power Transfer Systems via Real-Time Thermal Camera Analysis. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 1547–1552. [Google Scholar] [CrossRef]
- Karanth, A.; Hara Kumaran, H.; Kumar, R.B.R. Foreign Object Detection in Inductive Coupled Wireless Power Transfer Environment Using Thermal Sensors. WIPO Patent WO2012/004092 A2, 12 January 2012. [Google Scholar]
- Sun, Y.; Wei, G.; Qian, K.; He, P.; Zhu, C.; Song, K. A Foreign Object Detection Method Based on Variation of Quality Factor of Detection Coil at Multi-frequency. In Proceedings of the 2021 IEEE 12th Energy Conversion Congress Exposition—Asia (ECCE-Asia), Singapore, 24–27 May 2021; pp. 1578–1582. [Google Scholar] [CrossRef]
- Shi, W.; Dong, J.; Soeiro, T.B.; Bauer, P. Integrated Solution for Electric Vehicle and Foreign Object Detection in the Application of Dynamic Inductive Power Transfer. IEEE Trans. Veh. Technol. 2021, 70, 11365–11377. [Google Scholar] [CrossRef]
- Chu, S.Y.; Zan, X.; Avestruz, A.T. Electromagnetic Model-Based Foreign Object Detection for Wireless Power Transfer. IEEE Trans. Power Electron. 2022, 37, 100–113. [Google Scholar] [CrossRef]
- Xiang, L.; Zhu, Z.; Tian, J.; Tian, Y. Foreign Object Detection in a Wireless Power Transfer System Using Symmetrical Coil Sets. IEEE Access 2019, 7, 44622–44631. [Google Scholar] [CrossRef]
- Thai, V.X.; Park, J.H.; Jeong, S.Y.; Rim, C.T.; Kim, Y.S. Equivalent-Circuit-Based Design of Symmetric Sensing Coil for Self-Inductance-Based Metal Object Detection. IEEE Access 2020, 8, 94190–94203. [Google Scholar] [CrossRef]
- Liu, X.; Liu, C.; Han, W.; Pong, P.W.T. Design and Implementation of a Multi-Purpose TMR Sensor Matrix for Wireless Electric Vehicle Charging. IEEE Sens. J. 2019, 19, 1683–1692. [Google Scholar] [CrossRef]
- Qi, C.; Lin, T.; Wang, Z.; Li, D.; Sun, T. Research on metal object detection of MCR-WPT system that allows transmisson coils to be misaligned. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 4642–4647. [Google Scholar] [CrossRef]
- Gan, K.; Zhang, H.; Yao, C.; Lai, X.; Jin, N.; Tang, H. Statistical Model of Foreign Object Detection for Wireless EV Charger. In Proceedings of the 2019 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), London, UK, 18–21 June 2019; pp. 71–74. [Google Scholar] [CrossRef]
- Verghese, S.; Kesler, M.P.; Hall, K.; Lou, H.T. Foreign Object Detection in Wireless Energy Transfer Systems. WIPO Patent WO2013/036947 A2, 14 March 2013. [Google Scholar]
- Rim, C.T.; Mi, C. Foreign Object Detection. In Wireless Power Transfer for Electric Vehicles and Mobile Devices; Wiley/IEEE/John Wiley & Sons Ltd.: Chichester, UK, 2017; Chapter 22; pp. 457–469. [Google Scholar]
- Jeong, S.Y.; Kwak, H.G.; Jang, G.C.; Choi, S.Y.; Rim, C.T. Dual-Purpose Nonoverlapping Coil Sets as Metal Object and Vehicle Position Detections for Wireless Stationary EV Chargers. IEEE Trans. Power Electron. 2018, 33, 7387–7397. [Google Scholar] [CrossRef]
- Jang, G.C.; Jeong, S.Y.; Kwak, H.G.; Rim, C.T. Metal object detection circuit with non-overlapped coils for wireless EV chargers. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Sonapreetha, M.R.; Jeong, S.Y.; Choi, S.Y.; Rim, C.T. Dual-purpose Non-overlapped Coil Sets as Foreign Object and Vehicle Location Detections for Wireless Stationary EV Chargers. In Proceedings of the 2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power (2015 WoW), Daejeon, Republic of Korea, 5–6 June 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Thai, V.X.; Jang, G.C.; Jeong, S.Y.; Park, J.H.; Kim, Y.S.; Rim, C.T. Symmetric Sensing Coil Design for the Blind-Zone Free Metal Object Detection of a Stationary Wireless Electric Vehicles Charger. IEEE Trans. Power Electron. 2020, 35, 3466–3477. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Thai, V.X.; Park, J.H.; Rim, C.T. Self-Inductance-Based Metal Object Detection With Mistuned Resonant Circuits and Nullifying Induced Voltage for Wireless EV Chargers. IEEE Trans. Power Electron. 2019, 34, 748–758. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Thai, V.X.; Park, J.H.; Rim, C.T. Metal Object Detection System with Parallel-mistuned Resonant Circuits and Nullifying Induced Voltage for Wireless EV Chargers. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018-ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 2564–2568. [Google Scholar] [CrossRef]
- Shi, W.; Grazian, F.; Dong, J.; Soeiro, T.B.; Bauer, P. Detection of Metallic Foreign Objects and Electric Vehicles Using Auxiliary Coil Sets for Dynamic Inductive Power Transfer Systems. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 1599–1604. [Google Scholar] [CrossRef]
- Cai, W.; Yi, F.; Jiang, L. Fast Online Foreign Object Detection Method using Auxiliary Coils in Wireless Charging Systems. In Proceedings of the 2020 IEEE Transportation Electrification Conference Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 979–984. [Google Scholar] [CrossRef]
- Son, S.; Lee, S.; Rhee, J.; Shin, Y.; Woo, S.; Huh, S.; Lee, C.; Ahn, S. Foreign Object Detection of Wireless Power Transfer System Using Sensor Coil. In Proceedings of the 2021 IEEE Wireless Power Transfer Conference (WPTC), San Diego, CA, USA, 1–4 June 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Sun, T.; Qi, C. Design of Metal Object Detection Coil Set with Positioning Function for WPT System. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 3884–3888. [Google Scholar] [CrossRef]
- Qi, C.; Duan, H.; Guo, J.; Sun, T.; Wang, W.; Yang, F. A Rack Coil for Metal Foreign Object Detection in WPT System. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Meng, T.; Tan, L.; Zhong, R.; Xie, H.; Huang, X. Research on Metal Foreign Object Detection of Electric Vehicle Wireless Charging System Based on Detection Coil. World Electr. Veh. J. 2021, 12, 203. [Google Scholar] [CrossRef]
- Xia, J.; Yuan, X.; Li, J.; Lu, S.; Cui, X.; Li, S.; Fernández-Ramírez, L.M. Foreign Object Detection for Electric Vehicle Wireless Charging. Electronics 2020, 9, 805. [Google Scholar] [CrossRef]
- Lu, J.; Zhu, G.; Mi, C.C. Foreign Object Detection in Wireless Power Transfer Systems. IEEE Trans. Ind. Appl. 2022, 58, 1340–1354. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, B.; Wang, K.; Wang, Y.; Yang, Y. Metal Foreign Object Detection in Electric Vehicle Wireless Power Transmission. In Proceedings of the 2020 IEEE International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 6–8 November 2020; Volume 1, pp. 696–701. [Google Scholar] [CrossRef]
- Jeong, J.W.; Ryu, S.H.; Lee, B.K.; Kim, H.J. Tech tree study on foreign object detection technology in wireless charging system for electric vehicles. In Proceedings of the 2015 IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 18–22 October 2015; pp. 1–4. [Google Scholar] [CrossRef]
- OSEM-EV. Optimised and Systematic Energy Management in Electric Vehicles. Available online: http://www.osem-ev.eu/ (accessed on 4 October 2022).
- AutoDrive. Advancing Fail-Aware, Fail-Safe, and Fail-Operational Electronic Components, Systems, and Architectures for Highly and Fully Automated Driving to Make Future Mobility Safer, More Efficient, Affordable, and End-User Acceptable. Available online: http://www.autodrive-project.eu/ (accessed on 4 October 2022).
- ArchitectECA2030. Trustable Architectures with Acceptable Residual Risk for the Electric, Connected and Automated Cars. Available online: https://architect-eca2030.eu/ (accessed on 4 October 2022).
- AI4CSM. Automotive Intelligence 4 Connected Shared Mobility. Available online: https://ai4csm.eu/ (accessed on 4 October 2022).
- New England Wire Technologies. Litz Wire Types and Constructions. Available online: https://www.newenglandwire.com/product/litz-wire-types-and-constructions/ (accessed on 4 October 2022).
- Blinzinger Electronic Components. Ferrites—Soft-Magnetic Ferrite Cores (MnZn). Available online: https://www.blinzinger-elektronik.de/en/ferrites/ferrite-blocks-ferrite-plates-ferrite-tiles-in-one-piece/ (accessed on 4 October 2022).
- WIMA GmbH & Co. KG. Pulse Capacitors—FKP 1. Available online: https://www.wima.de/en/our-product-range/pulse-capacitors/fkp-1/ (accessed on 4 October 2022).
- European Central Bank. Common Sides. Available online: https://www.ecb.europa.eu/euro/coins/common/html/index.en.html (accessed on 4 October 2022).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description/Value |
|---|---|
| Coil: | |
| Dimensions | |
| in x-direction: | 360 mm (inside)/600 mm (outside) |
| in y-direction: | 510 mm (inside)/750 mm (outside) |
| Material: | Litz wire NELC840/38SPSGB (5 × 4 × 42 AWG 38, ∅ 4.2 mm) [48] |
| Number of parallel wires: | 3 |
| Number of turns: | 7 |
| Inductance: | 83.3 μH |
| Average quality factor: | 1065 |
| Ferrites: | |
| Type: | Blinzinger Ferrite plate 120 mm × 40 mm × 6 mm (BMF8) [49] |
| Number: | 126 |
| Position: | Top side 4 mm below and centered to the coil |
| Dimensions | |
| in x-direction: | 720 mm |
| in y-direction: | 840 mm |
| Capacitors: | |
| Type: | WIMA FKP1U024707E00JS (47 nF, 2000 V−, 700 V~, 5%) [50] |
| Number: | 64 (2 blocks with 8 parallel branches with 4 in series each) |
| Total capacity: | 48.6 nF |
| Average quality factor: | 3008 |
| Resonance frequency: | |
| measured: | between 77.75 kHz and 78.00 kHz |
| calculated: | 79.1 kHz |
| Operating | Component in the xy-Plane at Positions | z-Component at | ||
|---|---|---|---|---|
| Current | ||||
| 4 A rms | 193.4 μT rms | 193.9 μT rms | 188.2 μT rms | 212 μT rms |
| 10 A rms | 480 μT rms | 483 μT rms | 468 μT rms | — |
| Number | Name | Dimensions [mm] | Composition |
|---|---|---|---|
| Euro coins [51] | |||
| 1 | 0.05 € | ∅ 21.25 × 1.67 | Copper-covered steel |
| 2 | 0.50 € | ∅ 24.25 × 2.38 | Nordic gold |
| 3 | 1.00 € | ∅ 23.25 × 2.33 | Outside: nickel brass |
| inside: copper-nickel, nickel, copper-nickel | |||
| 4 | 2.00 € | ∅ 25.75 × 2.20 | Outside: copper-nickel |
| inside: nickel brass, nickel, nickel brass | |||
| 5 | Metal sheet/bar | 50 × 50 × 0.2 | Aluminium |
| 6 | 55 × 55 × 0.2 | Copper | |
| 7 | 100 × 70 × 10 | Steel | |
| 8 | Nail | ∅ 3.8 × 98 | Steel |
| 50 A rms Coil Current | 80 A rms Coil Current | |||||
|---|---|---|---|---|---|---|
| Number | Temperature | Time 1 | Cooling Time 2 | Temperature | Time 1 | Cooling Time 2 |
| [°C] | [min:s] | [min:s] | [°C] | [min:s] | [min:s] | |
| 1 | 136.8 | 05:03 | 00:58 | 269.2 | 05:03 | 03:30 |
| 2 | 71.6 | 05:02 | — | 126.3 | 05:02 | 01:16 |
| 3 | 83.8 | 05:02 | 00:10 | 156.7 | 05:05 | 01:49 |
| 4 | 109.4 | 05:04 | 00:45 | 190.6 | 05:09 | 02:46 |
| 5 | 154.8 | 04:57 | 01:38 | 302.2 | 03:00 | 04:40 |
| 6 | 97.1 | 05:05 | 00:35 | 293.5 | 05:04 | 05:41 |
| 7 | 309.7 | 04:42 | 39:15 | — | — | — |
| 8 | 324.1 | 01:54 | 03:42 | — | — | — |
| Number | Type | Position of the Conductor Loops 1 | Offset Voltage 2 | |
|---|---|---|---|---|
| x-Direction [mm] | y-Direction [mm] | |||
| 1 | 2 × 1 × 1 | variable | 0 | |
| 2 | 2 × 32 × 1 | 0 | ±24 | 90.28 mV rms 19.89 mV rms 3 |
| 3 | 2 × 16 × 1 | ±192 | −48 | |
| 4 | 2 × 16 × 1 | ±192 | 48 | |
| 5 | 4 × 8 × 1 | ±288, ±96 | 0 | 103.54 mV rms |
| 6 | 8 × 4 × 1 | ±336, ±240, ±144, ±48, | 0 | 11.67 mV rms |
| 7 | 2 × 3 × 3 | ±36 | 0 | 7.51 mV rms |
| Number | Sensor Coil Area | Interference Voltage | |
|---|---|---|---|
| Grid Size | Size [cm2] | [mV peak] | |
| 2 | 64 | 368.64 | 80.33 |
| 3 | 32 | 184.32 | 190.80 |
| 4 | 32 | 184.32 | 165.70 |
| 5 | 32 | 184.32 | 1071.13 |
| 6 | 32 | 184.32 | 1171.55 |
| 7 | 18 | 103.68 | 177.41 |
| Operating | Component in the xy-Plane at Positions | z-Component at | ||
|---|---|---|---|---|
| Current | ||||
| 50 A rms | 2.42 mT rms | 2.42 mT rms | 2.35 mT rms | 2.65 mT rms |
| 80 A rms | 3.87mT rms | 3.88 mT rms | 3.76 mT rms | 4.24 mT rms |
| 100 A rms | 4.83 mT rms | 4.85 mT rms | 4.70 mT rms | 5.30 mT rms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hentschel, U.; Labitzke, F.; Helwig, M.; Winkler, A.; Modler, N. Aspects of Foreign Object Detection in a Wireless Charging System for Electric Vehicles Using Passive Inductive Sensors. World Electr. Veh. J. 2022, 13, 241. https://doi.org/10.3390/wevj13120241
Hentschel U, Labitzke F, Helwig M, Winkler A, Modler N. Aspects of Foreign Object Detection in a Wireless Charging System for Electric Vehicles Using Passive Inductive Sensors. World Electric Vehicle Journal. 2022; 13(12):241. https://doi.org/10.3390/wevj13120241
Chicago/Turabian StyleHentschel, Uwe, Fiete Labitzke, Martin Helwig, Anja Winkler, and Niels Modler. 2022. "Aspects of Foreign Object Detection in a Wireless Charging System for Electric Vehicles Using Passive Inductive Sensors" World Electric Vehicle Journal 13, no. 12: 241. https://doi.org/10.3390/wevj13120241
APA StyleHentschel, U., Labitzke, F., Helwig, M., Winkler, A., & Modler, N. (2022). Aspects of Foreign Object Detection in a Wireless Charging System for Electric Vehicles Using Passive Inductive Sensors. World Electric Vehicle Journal, 13(12), 241. https://doi.org/10.3390/wevj13120241