

Using Driving-Cycle Data to Retrofit and Electrify Sub-Saharan Africa’s Existing Minibus Taxis for a Circular Economy


Abstract
:1. Introduction
“The vehicle capital cost is considered a key barrier to uptake [of electric vehicles in sub-Saharan Africa]. Therefore, affordable vehicles must be designed and manufactured to lower vehicle capital costs. This could be achieved through local manufacturing of SSA-specific EVs.” and “Alternatively, retrofitting vehicles to be electric could lower prices even further and be a more widely achievable option.”—Collett et al. in Energy Strategy Reviews [1].
1.1. Introduction to Retrofit Contextualisation
1.2. Contribution
2. Retrofit Considerations
2.1. Vehicle Modification Requirements and Regulations
2.2. Weight of Vehicle before Removal
- Tare weight: The tare weight refers to the vehicle’s weight when it is empty, without any cargo or passengers, and includes the weight of all fluids such as fuel, oil, and coolant.
- GVM: The GVM represents the maximum permissible weight of the vehicle, including the tare weight, passengers, cargo, and any additional equipment or load.
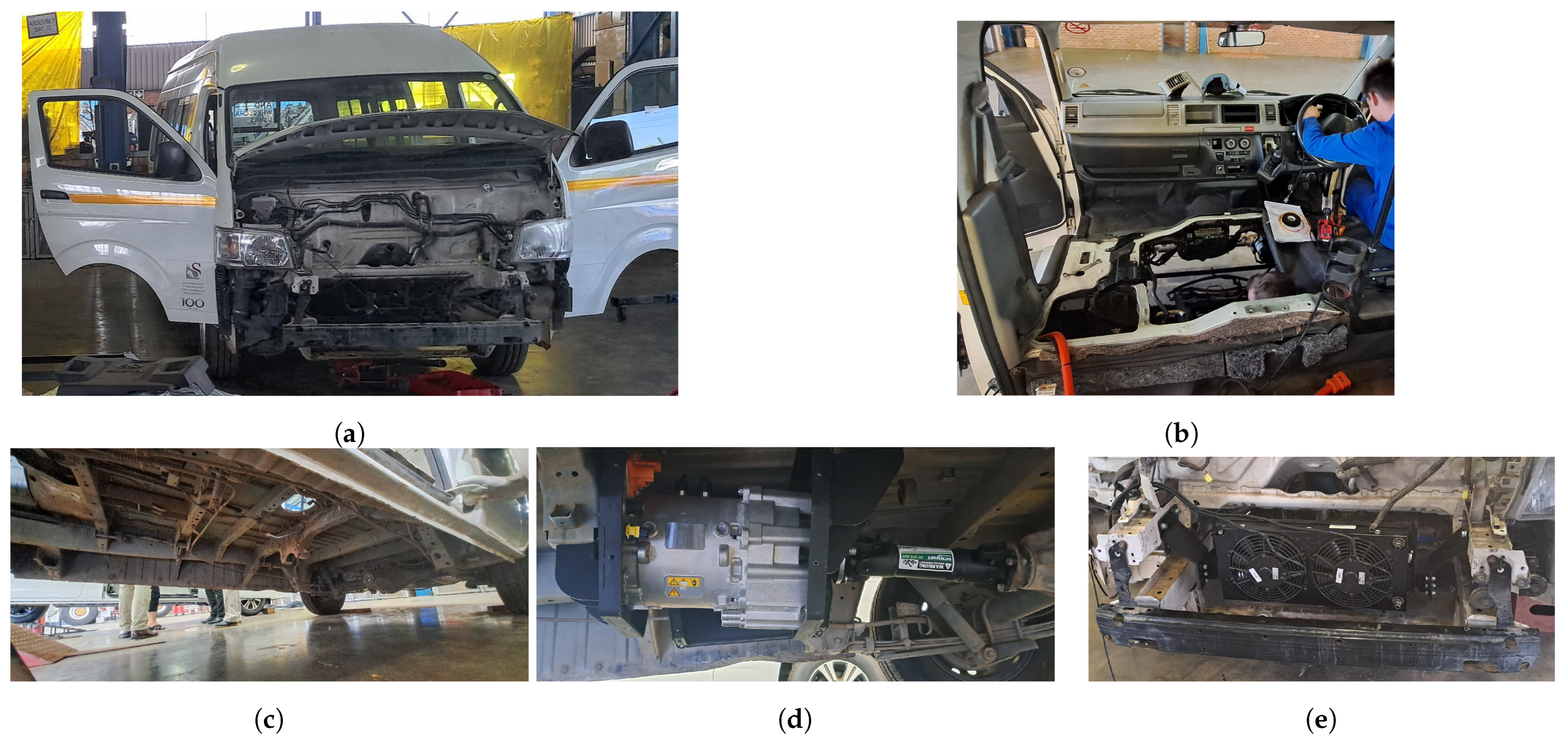
2.3. Removal of Combustion-Related Components
- Internal Combustion Engine: The entire engine and its specific functioning components can be detached. However, the harness connections connected to the engine should only be disconnected at this point since some sensors may be reused in the new vehicle’s electronic control unit (ECU).
- Fuel system: The fuel tank and all its related components, such as the fuel lines, fuel pump, and fuel injectors, can be removed.
- Radiator system: The main radiator responsible for cooling the engine coolant is no longer needed. Thus, all the related piping and pumps can also be removed. Depending on the design and component selection, a different cooling system will be installed for the electric drivetrain.
- Exhaust system: The exhaust module containing the catalytic converter and the muffler can be removed.
- Starter motor: The combustion engine’s starter motor is not required and can be removed.
- Alternator: As the low-voltage system will be operated on a different low-voltage circuit, the alternator is no longer necessary and can be removed. The 12 V battery will be reused for the electric drivetrain’s low-voltage (<48 V) system.
2.4. Weight of Vehicle after Removal
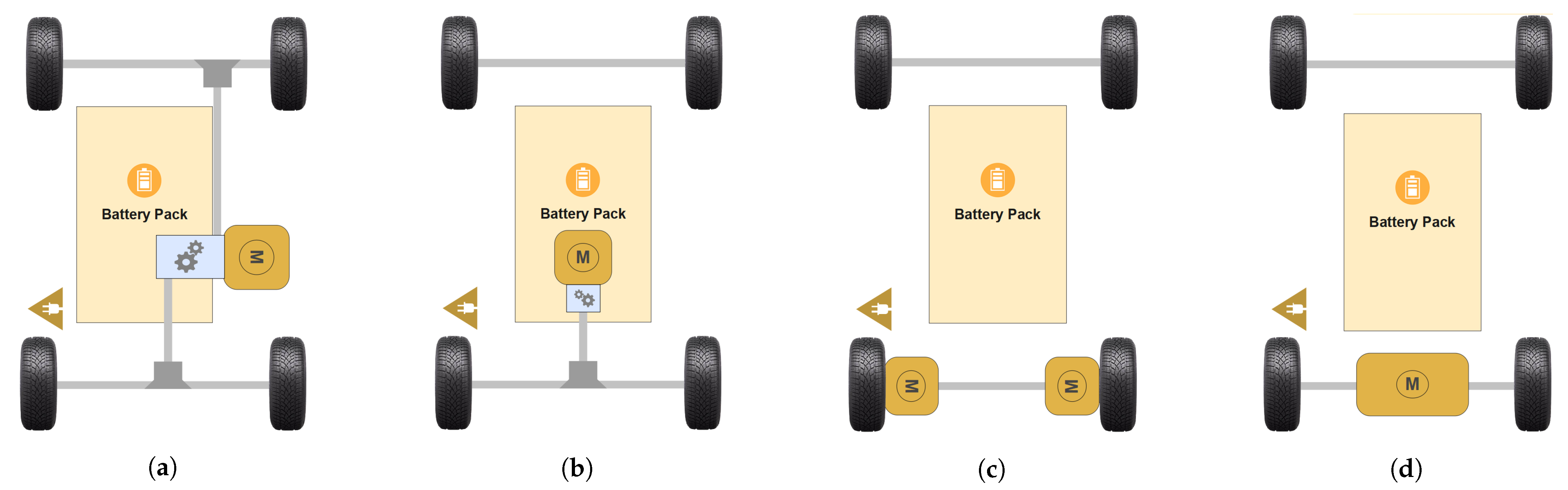
2.5. Different Types of Electric Drivetrain Typologies
2.6. Battery Electric Vehicle Component List
- Electric motor: The electric motor replaces the ICE of the original vehicle.
- Reduction gearbox: For safety reasons, it is crucial that the new electric propulsion unit replicates the original rpm (revolutions per minute) and torque ranges produced by the transmission and ICE due to the components from the differential gearbox to the wheels being unchanged. The reduction gearbox ensures that the high rpm speeds generated by the electric motor do not exceed dangerous limits that the original vehicle’s components are not designed to handle. Additionally, the reduction gearbox substantially increases the torque that can be produced by the electric motor, enabling the vehicle to maintain adequate performance and provability similar to the original ICE configuration.
- Inverter: The inverter acts as the motor controller by converting the DC input power from the battery pack to the desired AC or DC output power, depending on the motor specification and desired operation.
- Battery pack: The battery pack of the electric vehicle is a combination of battery cells, often lithium ion, combined in specific configurations (series and parallel) to achieve a predetermined energy capacity in kWh and the desired voltage for the chosen inverter. Battery packs include battery management systems (BMS) to ensure that each cell is monitored and balanced to maximise usability and lifespan.
- Charging system: The charging system consists of an onboard charging port and charger. The system allows the battery pack to be charged from an external power source.
- Cooling systems: Two central cooling systems can be implemented in a retrofit vehicle. There is one cooling system for the battery pack to keep the battery cells operating at the most efficient temperature. Similarly, there is a cooling system for the electric motor.
- DC-DC Converter: The converter must supply (12 V to 48 V) to the low-voltage system in the vehicle from the high-voltage battery pack. The low-voltage system will power all the 12 V systems in the vehicle, such as the headlights, windscreen wipers, indicators, and various vehicle electronics.
- Vehicle control unit (VCU): The VCU acts as the central communication hub for the various components and electronic control units (ECUs).
- Electric throttle control: If the original ICE vehicle uses a manual throttle cable, it will need to be replaced with an electronic control throttle that connects to the VCU for acceleration control.
- Electric servo pumps: If the original ICE vehicle contained an engine-powered assisted hydraulic pump for the power steering and brakes, one or two electric servo pumps need to be implemented in the retrofit to assist with power steering and the hydraulic pressure for the brakes.
- High-voltage safety components: Specific high-voltage (60 V to 800 V) safety components are required for the battery EV high-voltage system, such as high-voltage wiring, fuses, and safety disconnects.
3. Methodology
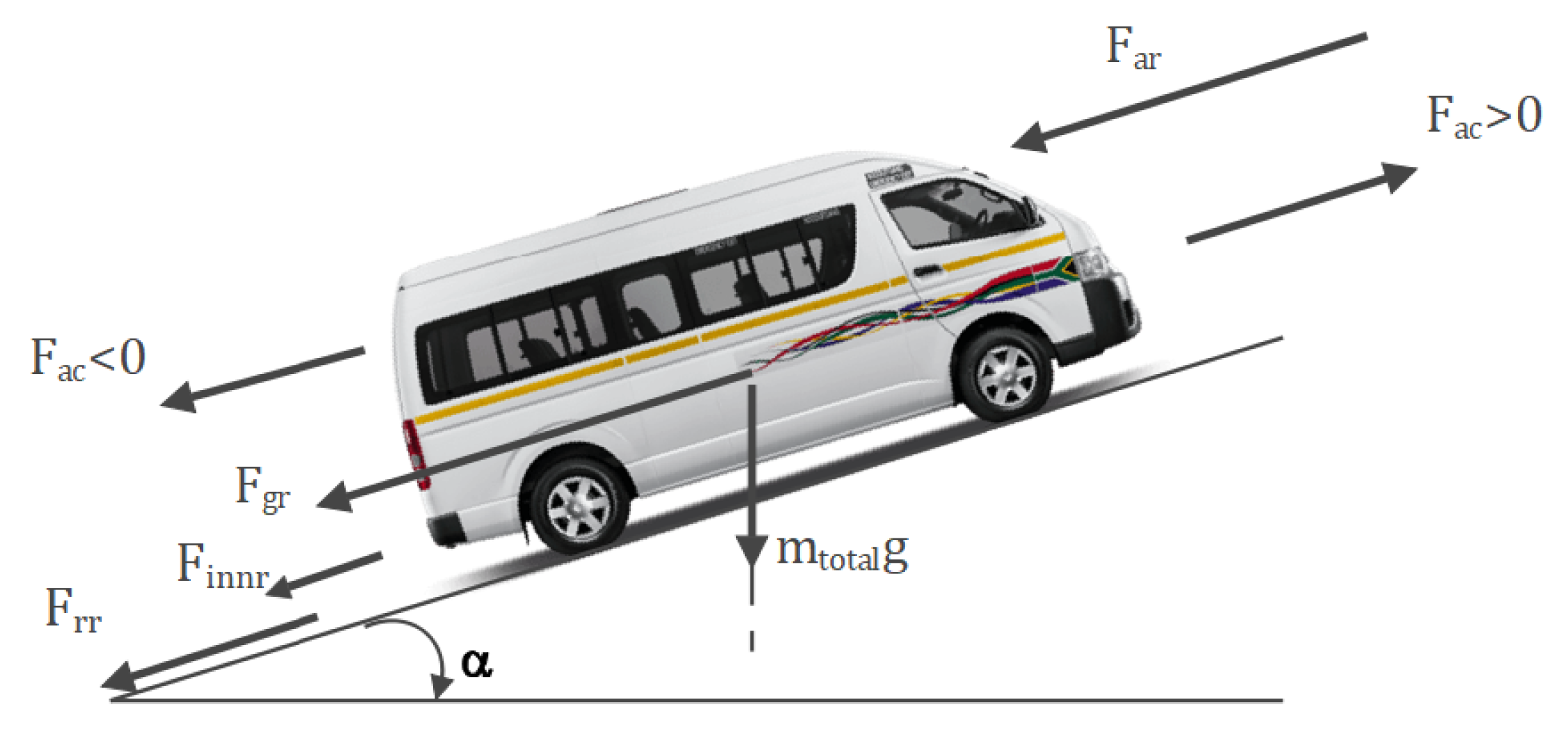
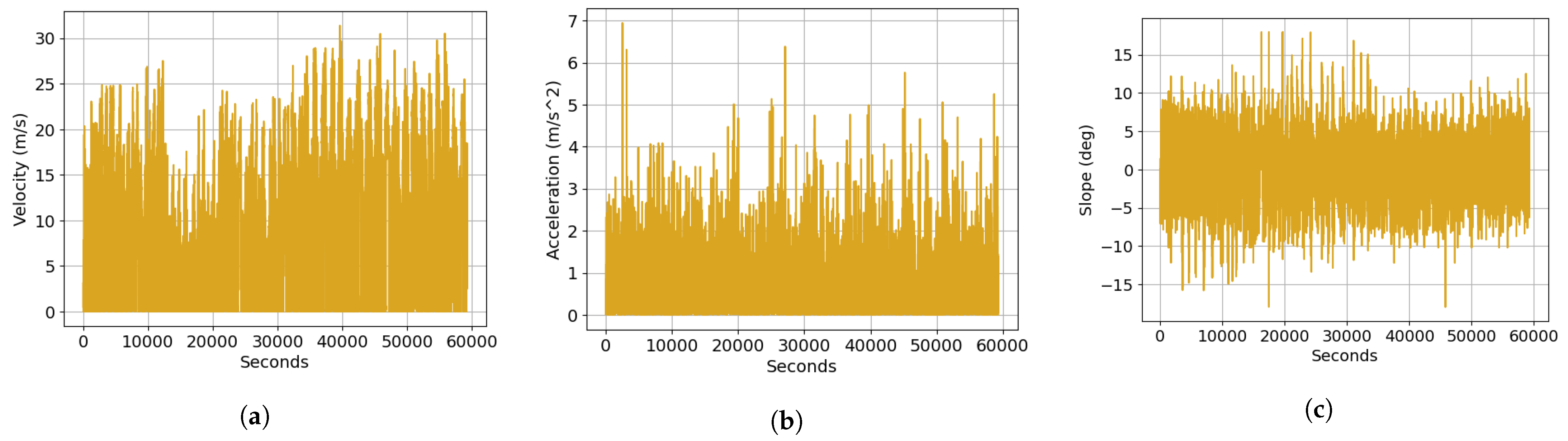
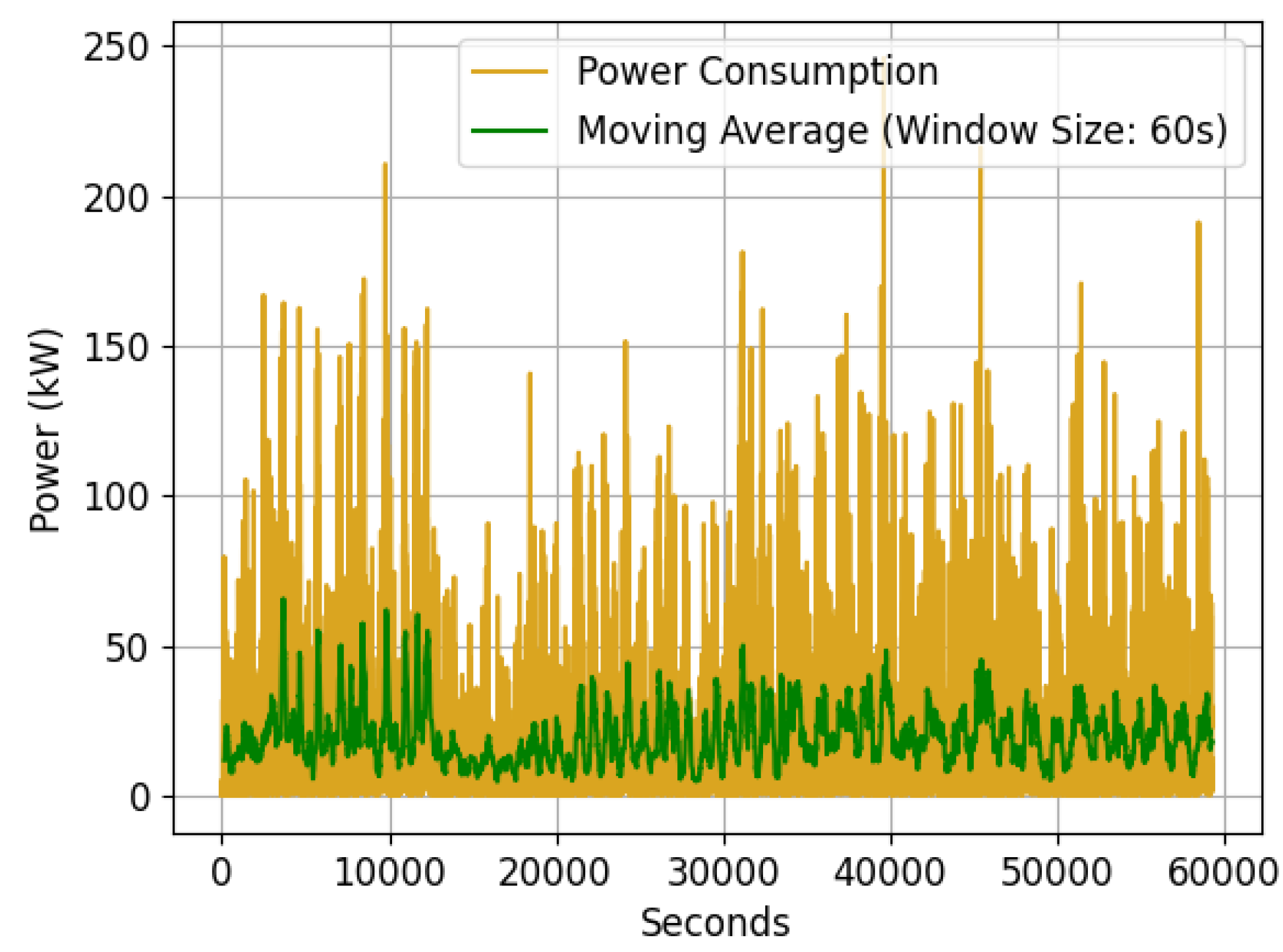
3.1. Vehicle Driving-Cycle Power Requirements
3.2. Propulsion Unit Selection and Sizing Model
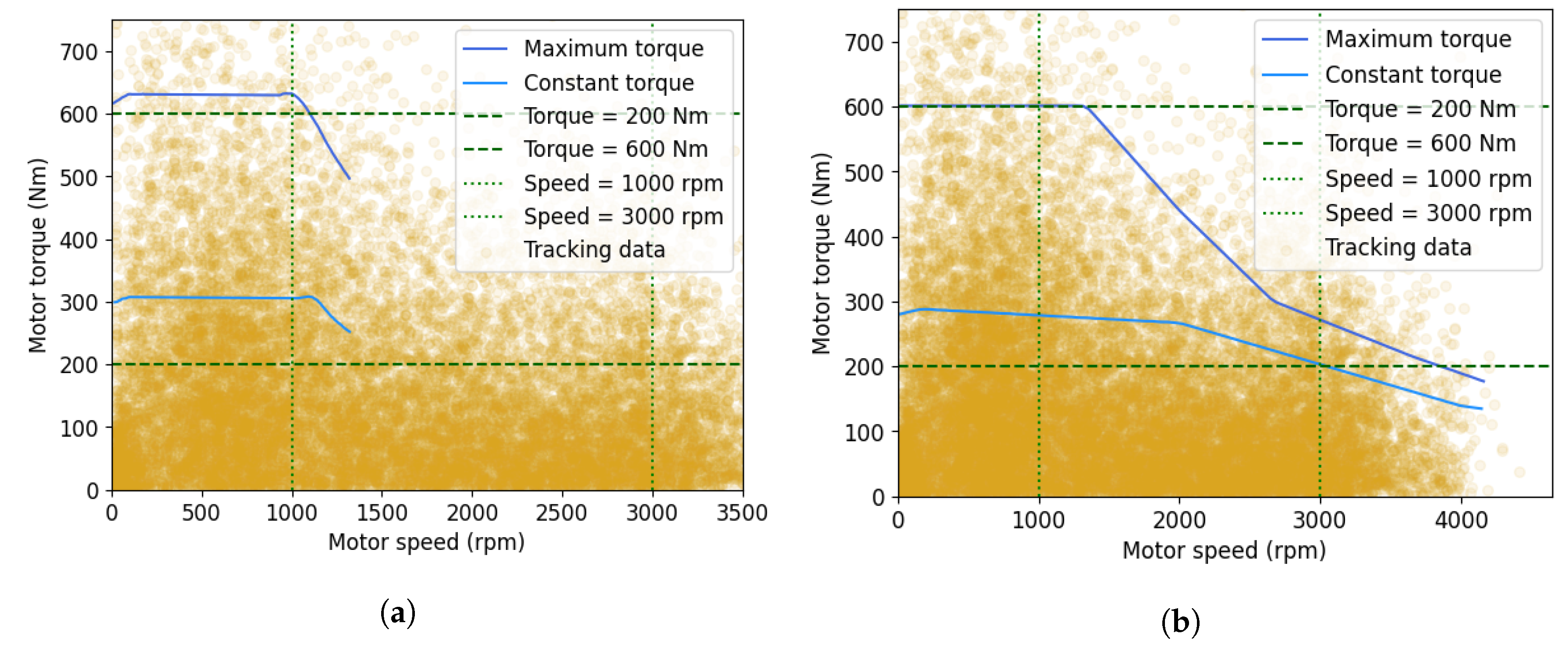
3.2.1. Propulsion Unit Torque-Speed Analysis
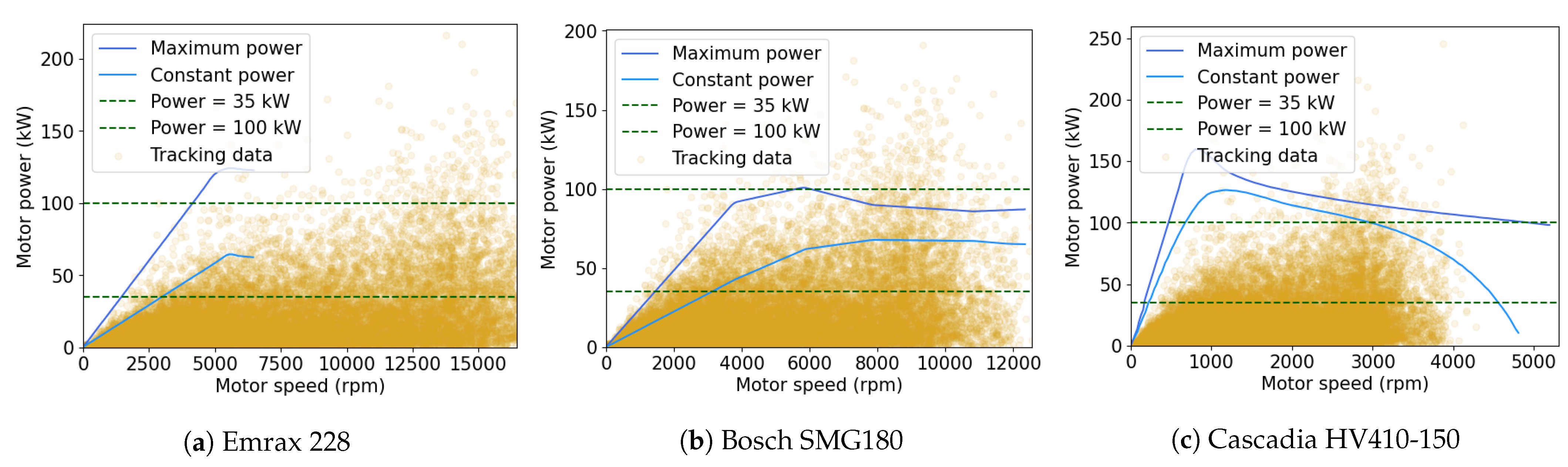
3.2.2. Propulsion Unit Power Analysis
3.2.3. Propulsion Unit Selection
3.3. Battery Size and Range Determination
3.3.1. Battery Technology and Cell Selection
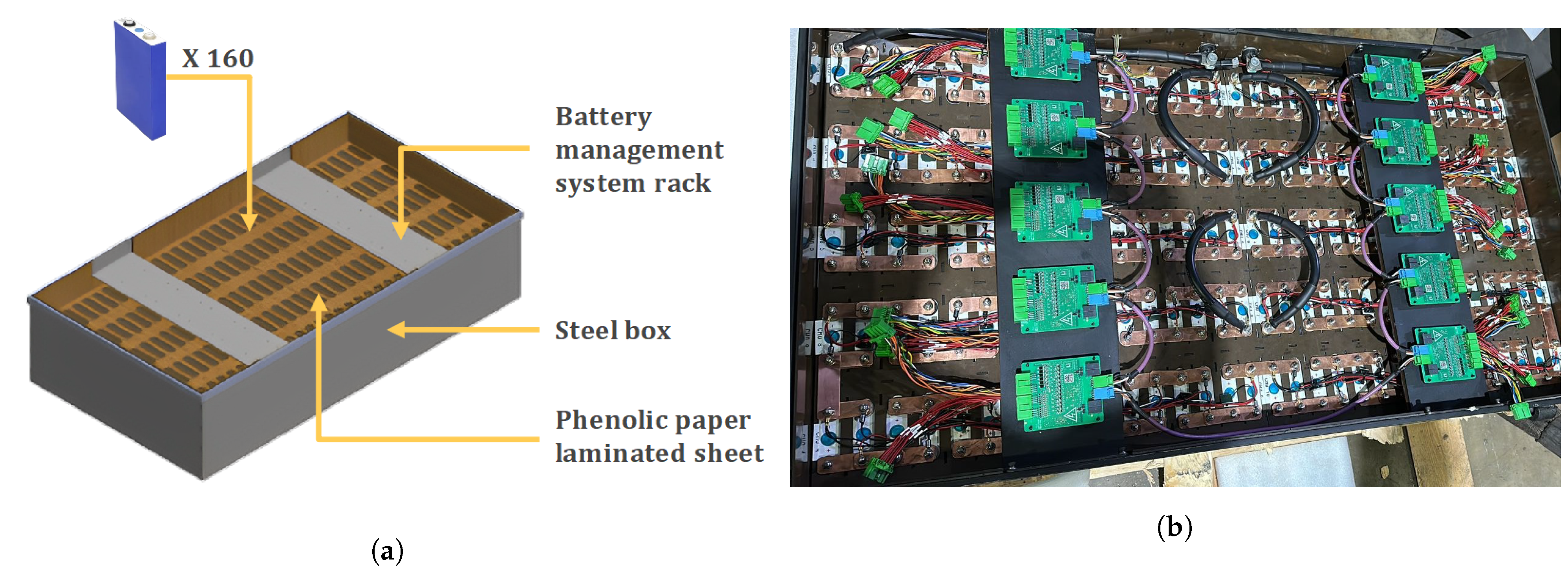
3.3.2. Battery Pack Design
3.3.3. Battery Pack Additional Components
- Battery cells: As explained in Section 3.3.1, the battery cell selection is critical for the performance and safety of the battery pack.
- Battery Management System (BMS): The battery management system encompasses several crucial functions such as monitoring, protection, charging and discharging management, communication, diagnostics, and data management. The BMS plays a pivotal role in maintaining the balance of the battery pack and controlling voltage levels [49]. This system is divided into two key sub-components: the BMS master and the BMS slaves. The BMS master handles back-end operations and is situated within the vehicle’s electronic control unit. Conversely, the BMS slaves are microcircuits linked to the front-end connections of the battery cells [50]. Each BMS slave can be linked to multiple battery cells and carries out essential tasks such as signal acquisition, filtering, and more.
- Cooling management system: The majority of battery packs require a cooling management system to maintain batteries within an optimal temperature operating range. In this use case, a battery pack cooling system was not implemented. This may lead to operational temperatures that exceed optimal cell temperatures, which can result in inefficient battery operation. To ensure safe temperature ranges, the charging and discharging rates were limited operationally in accordance with manufacturer specifications.
- CAN communication system: For effective communication between the VCU and the battery pack, it is crucial for the battery pack to feature CAN outputs. These outputs enable seamless communication between the VCU and the BMS slaves.
- High-voltage wiring: The battery pack is connected to the inverter via HV wiring, which should be able to withstand the expected maximum current. This is determined by the motor’s power and the battery pack’s voltage. In the proposed battery pack, the wire should be able to withstand currents of up to 300 A.
- Busbars and connectors: Busbars are reliable metallic strips used to connect the different cells, and various other standard electric connectors can be used to connect to the input and output plugs.
- Fuses: Fuses are added in between the battery packs to prevent current-overload and short-circuit scenarios. The fuses added to the battery pack are rated at 300 Amp and 400 V DC.
- Isolation contactors: An isolation contactor functions as an electrical switch connecting the battery pack to the remainder of the vehicle. This mechanism enhances safety during maintenance activities and safeguards against potential emergencies. The VCU of the vehicle controls the contactor.
- Manual disconnect: The manual disconnect is a manual switch that disconnects the main power connection from the battery box. This is used to isolate power in the case of emergencies or maintenance operations.
3.4. Vehicle Electric and Electronic Systems
3.4.1. Vehicle Control Unit
3.4.2. High-Voltage Source
3.4.3. Low-Voltage Rack
4. Braking System and Regenerative Braking
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| BMS | Battery Management System |
| CAN | Control Area Network |
| CATL | Contemporary Amperex Technology Co. Limited |
| DC | Direct Current |
| ECU | Electronic Control Unit |
| EV | Electric Vehicle |
| GPS | Global Positioning System |
| GVM | Gross Vehicle Mass |
| HV | High Voltage |
| ICE | Internal Combustion Engine |
| LFP | Lithium Iron Phosphate |
| LV | Low Voltage |
| LMO | Lithium Manganese Oxide |
| LTO | Lithium Titanate Oxide |
| NCA | Nickel Cobalt Aluminium |
| NMC | Nickel Manganese Cobalt |
| NRCS | National Regulator for Compulsory Specifications |
| VCU | Vehicle Control Unit |
References
- Collett, K.A.; Hirmer, S.A.; Dalkmann, H.; Crozier, C.; Mulugetta, Y.; McCulloch, M.D. Can electric vehicles be good for Sub-Saharan Africa? Energy Strategy Rev. 2021, 38, 100722. [Google Scholar] [CrossRef]
- Boudway, I. Europe Needs 65 Million Electric Vehicle Chargers by 2035. 2022. Bloomberg. 8 February 2022. Available online: https://www.bloomberg.com/news/articles/2022-02-08/europe-will-need-65-million-electric-vehicle-chargers-by-2035(accessed on 10 October 2023).
- BMUV. EU Member States Pave Way for Zero-Emission Cars from 2035; BMUV: Berlin, Germany, 2023. [Google Scholar]
- Vollgraaff, R. South African Car Exports Seen Beating Local Sales This Year. 2023. Bloomberg. February 2023. Available online: https://www.bloomberg.com/news/articles/2023-02-21/south-african-car-exports-seen-beating-local-sales-this-year?in_source=embedded-checkout-banner(accessed on 10 October 2023).
- BusinessTech. South Africa Needs to Kick-Start Electric Vehicle Production–Or Risk Losing Billions in Exports. Bloomberg, 8 February 2022. Available online: https://businesstech.co.za/news/motoring/602960/south-africa-needs-to-kick-start-electric-vehicle-production-or-risk-losing-billions-in-exports/(accessed on 10 October 2023).
- CEIC. South Africa Motor Vehicle Production, 1997–2021; CEIC Data: Singapore, 2022. [Google Scholar]
- BusinessTechSA. Good News for South Africa’s Motor Industry. Businesstech, October 2022. Available online: https://businesstech.co.za/news/motoring/630803/good-news-for-south-africas-motor-industry/(accessed on 10 October 2023).
- Gaylor, C.; Anthony, D.; Moshikaro, L. Department of Trade, Industry and Competition; National Association of Automobile Manufacturers of South Africa: Harnessing Electric Vehicles for Industrial Development in South Africa Prepared by Sustainable Growth. 2020. Available online: www.tips.org.za (accessed on 10 October 2023).
- IEA. Global EV Data Explorer—Data Tools; IEA: Paris, France, 2023. [Google Scholar]
- NAAMSA. December 2022 New Vehicle Stats; NAAMSA: Pretoria, South Africa, 2023; pp. 1–5. [Google Scholar]
- Booysen, M.J.; Abraham, C.J.; Rix, A.J.; Giliomee, J.H. Electrification of minibus taxis in the shadow of load shedding and energy scarcity. S. Afr. J. Sci. 2022, 118, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Giliomee, J.; Hull, C.; Collett, K.A.; McCulloch, M.; Booysen, M. Simulating mobility to plan for electric minibus taxis in Sub-Saharan Africa’s paratransit. Transp. Res. Part D Transp. Environ. 2023, 118, 103728. [Google Scholar] [CrossRef]
- Basson, A. SU and partners retrofit first minibus taxi in SA to run on electricity, 2023. Energy Sustain. Dev. 2023. Available online: https://www.eng.sun.ac.za/su-partners-retrofit-first-minibus-taxi-in-sa-to-run-on-electricity/ (accessed on 10 October 2023).
- Tara, E.; Shahidinejad, S.; Filizadeh, S.; Bibeau, E. Battery Storage Sizing in a Retrofitted Plug-in Hybrid Electric Vehicle. IEEE Trans. Veh. Technol. 2010, 59, 2786–2794. [Google Scholar] [CrossRef]
- Hoeft, F. Internal combustion engine to electric vehicle retrofitting: Potential customer’s needs, public perception and business model implications. Transp. Res. Interdiscip. Perspect. 2021, 9, 100330. [Google Scholar] [CrossRef]
- Anosike, A.; Loomes, H.; Udokporo, C.K.; Garza-Reyes, J.A. Exploring the challenges of electric vehicle adoption in final mile parcel delivery. Int. J. Logist. Res. Appl. 2021, 26, 683–707. [Google Scholar] [CrossRef]
- Santis, M.D.; Regis, F. Modeling, simulation, and techno-economic analysis of a retrofitted electric vehicle. In Proceedings of the 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Bari, Italy, 7–10 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Nemeth, T.; Bubert, A.; Becker, J.N.; De Doncker, R.W.; Sauer, D.U. A Simulation Platform for Optimization of Electric Vehicles With Modular Drivetrain Topologies. IEEE Trans. Transp. Electrif. 2018, 4, 888–900. [Google Scholar] [CrossRef]
- Sehab, R.; Barbedette, B.; Chauvin, M. Electric vehicle drivetrain: Sizing and validation using general and particular mission profiles. In Proceedings of the 2011 IEEE International Conference on Mechatronics, Istanbul, Turkey, 13–15 April 2011; pp. 77–83. [Google Scholar] [CrossRef]
- National Regulator for Compulsory Specifications. AUTOMOTIVE—Homologation of Vehicles; NRCS: Pretoria, South Africa, 2019. [Google Scholar]
- Machado, F.A.; Kollmeyer, P.J.; Barroso, D.G.; Emadi, A. Multi-Speed Gearboxes for Battery Electric Vehicles: Current Status and Future Trends. IEEE Open J. Veh. Technol. 2021, 2, 419–435. [Google Scholar] [CrossRef]
- Keoun, B. Designing an electric vehicle conversion. In Proceedings of the Southcon ’95, Fort Lauderdale, FL, USA, 7–9 March 1995; pp. 303–308. [Google Scholar] [CrossRef]
- Gunji, D.; Fujimoto, H. Efficiency analysis of powertrain with toroidal continuously variable transmission for Electric Vehicles. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 6614–6619. [Google Scholar] [CrossRef]
- Jian, L. Research Status and Development Prospect of Electric Vehicles Based on Hub Motor. In Proceedings of the 2018 China International Conference on Electricity Distribution (CICED), Tianjin, China, 17–19 September 2018; pp. 126–129. [Google Scholar] [CrossRef]
- Hull, C.; Giliomee, J.; Collett, K.A.; McCulloch, M.; Booysen, M. Using High Resolution Gps Data to Plan the Electrification of Paratransit: A Case Study in South Africa. Sciencedirect 2022. Available online: https://www.sciencedirect.com/science/article/pii/S1361920923000925?via%3Dihub (accessed on 10 October 2023).
- Tavares, A.A.; Fornasa, I.; Cutipa-Luque, J.C.; Ernesto Ponce Saldias, C.; Bianchi Carbonera, L.F.; Elias Bretas de Carvalho, B. Power Losses Analysis and Efficiency Evaluation of an Electric Vehicle Conversion. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles&International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Toyota. Toyota Hiace Ses’fikile Technical Specifications Leaflet. 2013. Available online: https://freewaytoyota.co.za/site/wp-content/uploads/2021/01/Sesfikile_Leaflet.pdf (accessed on 18 January 2023).
- Hofman, T.; Dai, C. Energy efficiency analysis and comparison of transmission technologies for an electric vehicle. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Budynas, R.G.; Nisbett, J.K.; Shigley, J.E. Shigley’s Mechanical Engineering Design; Mcgraw-Hill Education: New York, NY, USA, 2020. [Google Scholar]
- Jape, S.R.; Thosar, A. Comparison of electric motors for electric vehicle application. Int. J. Res. Eng. Technol. 2017, 6, 12–17. [Google Scholar] [CrossRef]
- Andrada, P.; Torrent, M.; Blanqué, B.; Perat, J. Switched Reluctance Drives for Electric Vehicle Applications. Renew. Energy Power Qual. J. 2005, 16, 311–317. [Google Scholar] [CrossRef]
- De Santiago, J.; Bernhoff, H.; Ekergård, B.; Eriksson, S.; Ferhatovic, S.; Waters, R.; Leijon, M. Electrical Motor Drivelines in Commercial All-Electric Vehicles: A Review. IEEE Trans. Veh. Technol. 2012, 61, 475–484. [Google Scholar] [CrossRef]
- Bhatt, P.; Mehar, H.; Sahajwani, M. Electrical Motors for Electric Vehicle—A Comparative Study. 2019. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=3364887 (accessed on 20 February 2023).
- Zeraoulia, M.; Benbouzid, M.E.H.; Diallo, D. Electric Motor Drive Selection Issues for HEV Propulsion Systems: A Comparative Study. IEEE Trans. Veh. Technol. 2006, 55, 1756–1764. [Google Scholar] [CrossRef]
- Emrax. EMRAX 228 Is a Compact Axial Flux Permanent Magnet Synchronous Electric Motor with High Power/Torque Density; Emrax: Kamnik, Slovenia, 2023. [Google Scholar]
- BOSCH. Separate Motor-Generator for Off-Highway Applications; BOSCH: Gerlingen, Germany, 2023. [Google Scholar]
- Cascadia. HVH410 Series Motors Datasheet, Packaging Model, Drawing and Application Manual; Cascadia: Wilsonville, OR, USA, 2023. [Google Scholar]
- Hughes, A.; Drury, B. Chapter 9—Synchronous, permanent magnet and reluctance motors and drives. In Electric Motors and Drives, 5th ed.; Hughes, A., Drury, B., Eds.; Newnes: Oxford, UK, 2019; pp. 365–370. [Google Scholar] [CrossRef]
- BOSCH. Gearboxes for Electric Drive Systems EDT180; BOSCH: Gerlingen, Germany, 2023. [Google Scholar]
- BOSCH. Inverter Generation 4; BOSCH: Gerlingen, Germany, 2023. [Google Scholar]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Crawford, M. Safer and Powerful Solid-State Batteries for Electric Vehicles; ASME: New York, NY, USA, 2022. [Google Scholar]
- Mohammadi, F.; Saif, M. A comprehensive overview of electric vehicle batteries market. e-Prime-Adv. Electr. Eng. Electron. Energy 2023, 3, 100127. [Google Scholar] [CrossRef]
- Ramey, J. Here’s Exactly When Toyota Promises Solid-State Batteries. 2023. Available online: https://news.yahoo.com/exactly-toyota-promises-solid-state-162200561.html (accessed on 20 September 2023).
- Miao, Y.; Liu, L.; Zhang, Y.; Tan, Q.; Li, J. An overview of global power lithium-ion batteries and associated critical metal recycling. J. Hazard. Mater. 2022, 425, 127900. [Google Scholar] [CrossRef] [PubMed]
- EV Lithium. 3.2V 105ah LF105 Prismatic LiFePO4 Battery Cell; EV Lithium: Hong Kong, China, 2023. [Google Scholar]
- Weiss, M.; Cloos, K.C.; Helmers, E. Energy efficiency trade-offs in small to large electric vehicles. Environ. Sci. Eur. 2020, 32, 46. [Google Scholar] [CrossRef]
- Shahan, Z. The Most Efficient Electric Cars: Comparing Real-World Energy Efficiency. 2021. Available online: https://cleantechnica.com/2021/12/06/most-efficient-electric-cars/ (accessed on 10 June 2023).
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D.U. Battery Management System Hardware Concepts: An Overview. Appl. Sci. 2018, 8, 534. [Google Scholar] [CrossRef]
- Gabbar, H.A.; Othman, A.M.; Abdussami, M.R. Review of Battery Management Systems (BMS) Development and Industrial Standards. Technologies 2021, 9, 28. [Google Scholar] [CrossRef]
- DSE. DSEM640|Vehicle and Off-Highway Machinery Control Systems (M-Series)|DSEControl|Deep Sea Electronics. 2023. Available online: https://www.deepseaelectronics.com/control/vehicle-off-highway-machinery-control-systems-m-series/dsem640 (accessed on 1 September 2023).
- Wu, J.; Zhang, H.; He, R.; Chen, P.; Chen, H. A Mechatronic Brake Booster for Electric Vehicles: Design, Control, and Experiment. IEEE Trans. Veh. Technol. 2020, 69, 7040–7053. [Google Scholar] [CrossRef]
- Zhang, L.; Yu, L.; Wang, Z.; Zuo, L.; Song, J. All-Wheel Braking Force Allocation During a Braking-in-Turn Maneuver for Vehicles With the Brake-by-Wire System Considering Braking Efficiency and Stability. IEEE Trans. Veh. Technol. 2016, 65, 4752–4767. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Vehicle acceleration | 0.664 | ||
| Vehicle velocity | 16.6 | ||
| Road slope | 0.175 |
| Parameter | Symbol | Value | Ref. |
|---|---|---|---|
| Gravitational acceleration | g | [25] | |
| Density of air at | [25] | ||
| Minibus weight (GVM) | [25] | ||
| Drag coefficient | 0.36 | [25] | |
| Rolling resistance coefficient | 0.02 | [25] | |
| Vehicle’s front surface area | A | [27] | |
| Moment of inertia of wheel | [28] | ||
| Moment of inertia of axle shaft | [28] | ||
| Wheel rolling radius | Measured |
| Description | Symbol | Value | Ref |
|---|---|---|---|
| Gear ratio of drivetrain | 3.727 | [27] | |
| Drivetrain efficiency | 0.96 | [29] |
| Requirement | Minimum Value | Maximum Value | Unit |
|---|---|---|---|
| Power () | 35 | 100 | kW |
| Torque () | 200 | 600 | Nm |
| Speed () | 1000 | 3000 | rpm |
| Criteria | DC | Induction | Switched Reluctance | Permanent Magnet Synchronous |
|---|---|---|---|---|
| Power Density (kW/kg) | 4 | 3 | 2 | 1 |
| Energy Efficiency (%) | 4 | 3 | 2 | 1 |
| Reliability (%) | 4 | 3 | 1 | 2 |
| Cost | 1 | 2 | 4 | 3 |
| Total | 13 | 11 | 9 | 7 |
| Parameters/Motors | Emrax 228 [35] | Bosch SMG180 [36] | Cascadia HV410-150 [37] |
|---|---|---|---|
| Voltage (V) | 520 | 400 | 700 |
| Maximum/Nominal power (kW) | 124/75 | 90/60 | 135/120 |
| Maximum/Nominal Torque (Nm) | 230/135 | 200/95 | 2000/550 |
| Maximum Speed (rpm) | 6500 | 12,800 | 4500 |
| Base Speed (rpm) | 5100 | 4800 | 800 |
| Energy Efficiency (%) | 92–98 | 94–96 | 90–95 |
| Weight (kg) | 12.9–13.5 | 30 | 140 |
| Cost (USD) | 4500 | 3000 | 17,000 |
| Parameter | Minimum Value | Maximum Value | Unit |
|---|---|---|---|
| DC input voltage range | 210 | 470 | V |
| AC output voltage range | 0 | 460 | |
| Current range | 320 | 900 | |
| Maximum output power range | 70 | 250 | kW |
| Nominal output power range | 42 | 150 | kW |
| Description | Value | Unit |
|---|---|---|
| Capacity | 169.7 | Wh/kg |
| Electric charge | 105 | Ah |
| Nominal voltage | 3.2 | V |
| Discharge cut-off voltage | 2.5 (T > 0 °C) | V |
| Standard charging and discharging current | 52.5 | A |
| Charging temperature | 0–65 | °C |
| Discharging temperature | –65 | °C |
| Cycle life | >4000 | discharge cycles |
| Weight | 1.98 ± 0.06 | kg |
| Dimensions | 130.3 × 36.35 × 200.5 | mm |
| Description | Value | Unit |
|---|---|---|
| Capacity | 53.760 | kWh |
| Electric charge | 210 | Ah |
| Nominal voltage | 256 | V |
| Weight | 304 ± 16 | kg |
| Dimensions | 685 × 298 × 1248 | mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lacock, S.; du Plessis, A.A.; Booysen, M.J. Using Driving-Cycle Data to Retrofit and Electrify Sub-Saharan Africa’s Existing Minibus Taxis for a Circular Economy. World Electr. Veh. J. 2023, 14, 296. https://doi.org/10.3390/wevj14100296
Lacock S, du Plessis AA, Booysen MJ. Using Driving-Cycle Data to Retrofit and Electrify Sub-Saharan Africa’s Existing Minibus Taxis for a Circular Economy. World Electric Vehicle Journal. 2023; 14(10):296. https://doi.org/10.3390/wevj14100296
Chicago/Turabian StyleLacock, Stephan, Armand André du Plessis, and Marthinus Johannes Booysen. 2023. "Using Driving-Cycle Data to Retrofit and Electrify Sub-Saharan Africa’s Existing Minibus Taxis for a Circular Economy" World Electric Vehicle Journal 14, no. 10: 296. https://doi.org/10.3390/wevj14100296
APA StyleLacock, S., du Plessis, A. A., & Booysen, M. J. (2023). Using Driving-Cycle Data to Retrofit and Electrify Sub-Saharan Africa’s Existing Minibus Taxis for a Circular Economy. World Electric Vehicle Journal, 14(10), 296. https://doi.org/10.3390/wevj14100296