
Optimization Effect of the Improved Power System Integrating Composite Motors on the Energy Consumption of Electric Vehicles

Abstract
:1. Introduction
2. Related Works
3. Optimization of Electric Vehicle Energy Efficiency by Integrating Composite Motor and Improved Power System
3.1. Configuration Optimization Design of Integrated Composite Motor and Electric Vehicle Power Systems
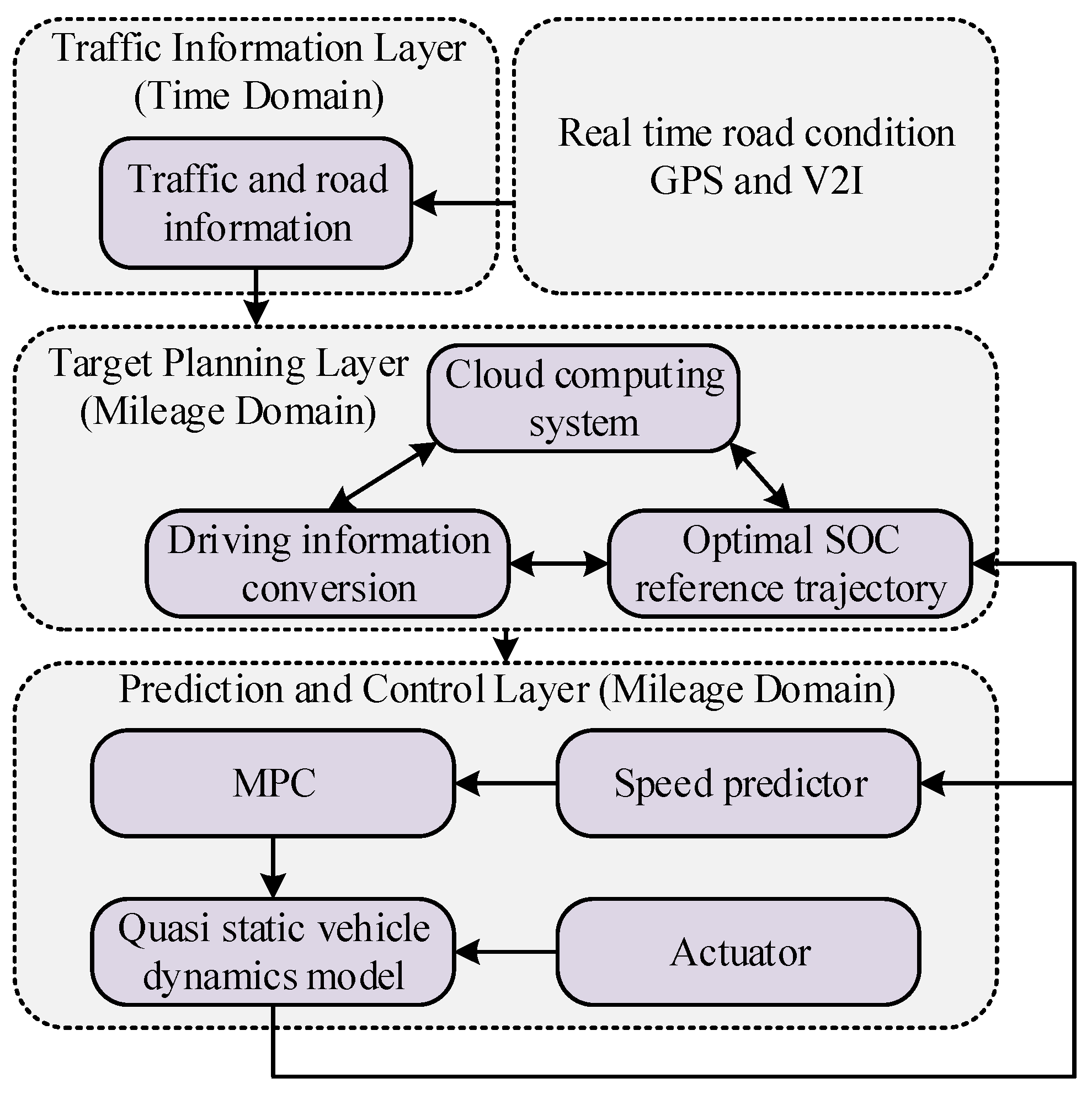
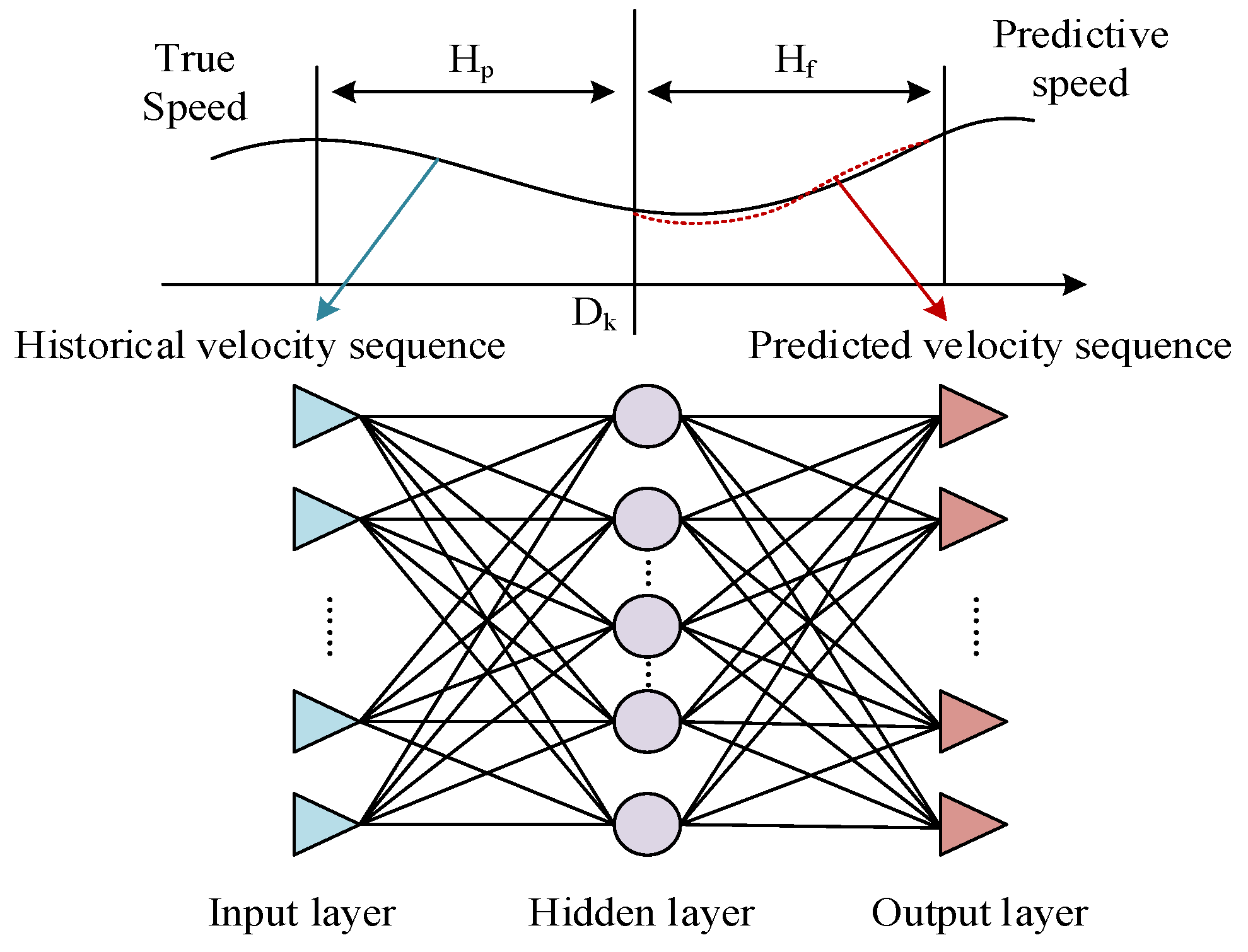
3.2. Improved Power System-Based Optimal Control Strategy for Energy Efficiency
4. Configuration Testing and Energy Consumption Simulation Analysis
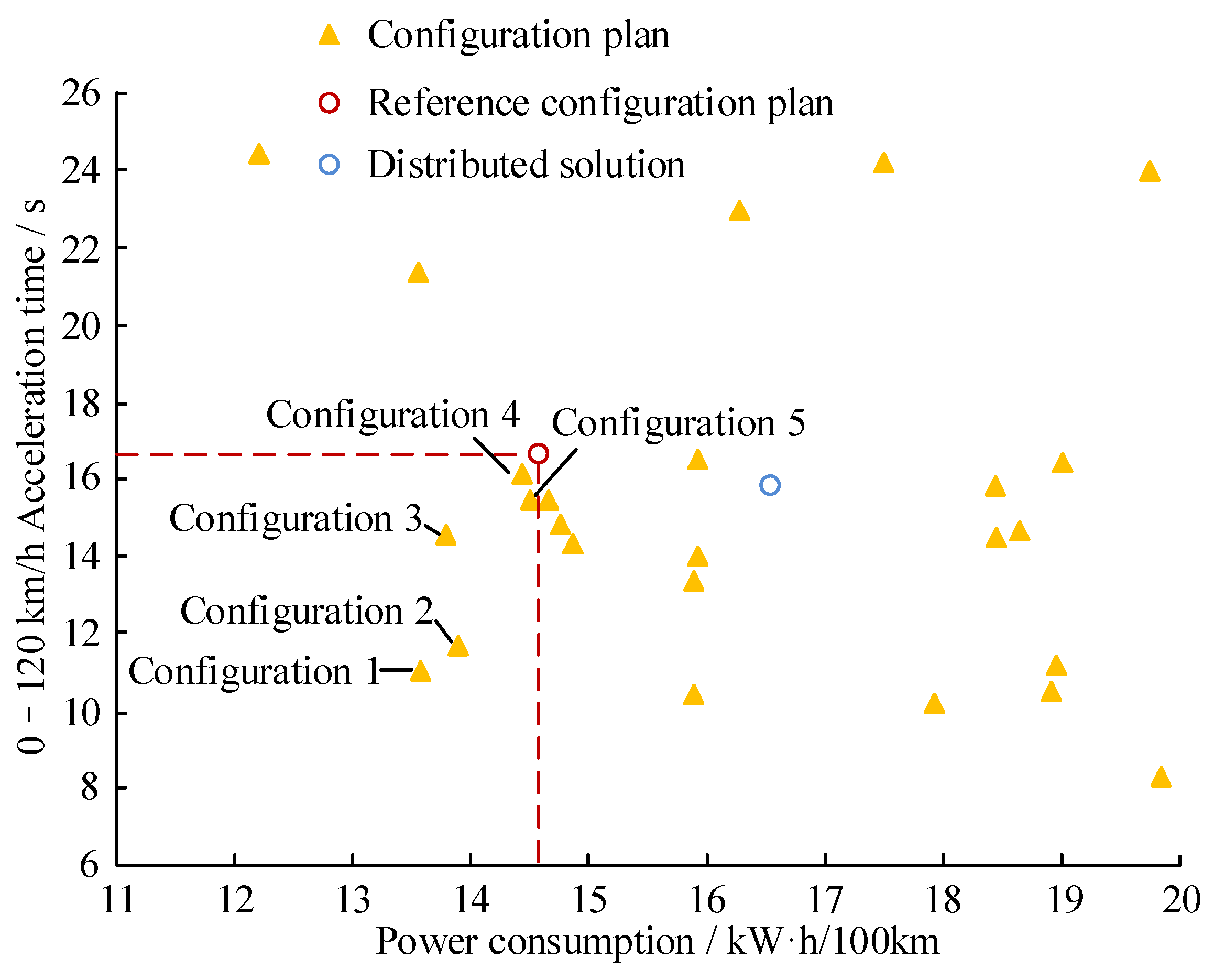
4.1. Configuration Optimization Testing
4.2. Energy Consumption Simulation Analysis
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, T.; Luo, H.; Zeng, X.; Yu, Z.; Liu, A.; Sangaiah, A. Mobility based trust evaluation for heterogeneous electric vehicles network in smart cities. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1797–1806. [Google Scholar] [CrossRef]
- Gryparis, E.; Papadopoulos, P.; Leligou, H.C.; Psomopoulos, C.S. Electricity demand and carbon emission in power generation under high penetration of electric vehicles. A European Union perspective. Energy Rep. 2020, 6, 475–486. [Google Scholar] [CrossRef]
- Yang, C.; Zha, M.; Wang, W.; Liu, K.; Xiang, C. Efficient energy management strategy for hybrid electric vehicles/plug-in hybrid electric vehicles: Review and recent advances under intelligent transportation system. IET Intell. Transp. Syst. 2020, 14, 702–711. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, N.; Tan, D.; Chang, J.; Shi, W. A robust online energy management strategy for fuel cell/battery hybrid electric vehicles. Int. J. Hydrogen Energy 2020, 45, 14093–14107. [Google Scholar] [CrossRef]
- Patil, H.; Kalkhambkar, V.N. Grid integration of electric vehicles for economic benefits: A review. J. Mod. Power Syst. Clean Energy 2020, 9, 13–26. [Google Scholar] [CrossRef]
- Li, Y.; Han, M.; Yang, Z.; Li, G. Coordinating flexible demand response and renewable uncertainties for scheduling of community integrated energy systems with an electric vehicle charging station: A bi-level approach. IEEE Trans. Sustain. Energy 2021, 12, 2321–2331. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A review on electric vehicles: Technologies and challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Alimujiang, A.; Jiang, P. Synergy and co-benefits of reducing CO2 and air pollutant emissions by promoting electric vehicles—A case of Shanghai. Energy Sustain. Dev. 2020, 55, 181–189. [Google Scholar] [CrossRef]
- Cunanan, C.; Tran, M.K.; Lee, Y.; Kwok, S.; Leung, V.; Fowler, M. A review of heavy-duty vehicle powertrain technologies: Diesel engine vehicles, battery electric vehicles, and hydrogen fuel cell electric vehicles. Clean Technol. 2021, 3, 474–489. [Google Scholar] [CrossRef]
- Zhao, X.; Ye, Y.; Ma, J.; Shi, P.; Chen, H. Construction of electric vehicle driving cycle for studying electric vehicle energy consumption and equivalent emissions. Environ. Sci. Pollut. Res. 2020, 27, 37395–37409. [Google Scholar] [CrossRef]
- Modi, S.; Bhattacharya, J.; Basak, P. Estimation of energy consumption of electric vehicles using deep convolutional neural network to reduce driver’s range anxiety. ISA Trans. 2020, 98, 454–470. [Google Scholar] [CrossRef] [PubMed]
- Alateef, S.; Thomas, N. Energy consumption estimation for electric vehicles using routing API data. In European Workshop on Performance Engineering; Springer International Publishing: Cham, Switzerland, 2022; pp. 37–53. [Google Scholar]
- Albatayneh, A.; Assaf, M.N.; Alterman, D.; Jaradat, M. Comparison of the overall energy efficiency for internal combustion engine vehicles and electric vehicles. Rigas Teh. Univ. Zinat. Raksti 2020, 24, 669–680. [Google Scholar] [CrossRef]
- Basso, R.; Kulcsár, B.; Sanchez-Diaz, I. Electric vehicle routing problem with machine learning for energy prediction. Transp. Res. Part B Methodol. 2021, 145, 24–55. [Google Scholar] [CrossRef]
- Muduli, U.R.; Beig, A.R.; Al Jaafari, K.; Alsawal, J.Y.; Behera, B.K. Interrupt-free operation of dual-motor four-wheel drive electric vehicle under inverter failure. IEEE Trans. Transp. Electrif. 2020, 7, 329–338. [Google Scholar] [CrossRef]
- Tu, Z.; Fei, F.; Deng, X. Untethered flight of an at-scale dual-motor hummingbird robot with bio-inspired decoupled wings. IEEE Robot. Autom. Lett. 2020, 5, 4194–4201. [Google Scholar] [CrossRef]
- Jafari, M.; Korpås, M.; Botterud, A. Power system decarbonization: Impacts of energy storage duration and interannual renewables variability. Renew. Energy 2020, 156, 1171–1185. [Google Scholar] [CrossRef]
- Mohammad-Alikhani, A.; Mahmoudi, A.; Khezri, R.; Kahourzade, S. Multiobjective optimization of system configuration and component capacity in an AC minigrid hybrid power system. IEEE Trans. Ind. Appl. 2022, 58, 4158–4170. [Google Scholar] [CrossRef]
- Sun, G.J.; Yun, J.H.; Cheon, M.W. Parallel Switch Configuration for High Voltage DC switching to secure PV power system safety. Trans. Electr. Electron. Mater. 2021, 22, 108–113. [Google Scholar] [CrossRef]
- Vishnuram, P.; P., S.; R., N.; K., V.; Nastasi, B. Wireless Chargers for Electric Vehicle: A Systematic Review on Converter Topologies, Environmental Assessment, and Review Policy. Energies 2023, 16, 1731. [Google Scholar] [CrossRef]
- Deepak, K.; Frikha, M.A.; Benômar, Y.; El Baghdadi, M.; Hegazy, O. In-Wheel Motor Drive Systems for Electric Vehicles: State of the Art, Challenges, and Future Trends. Energies 2023, 16, 3121. [Google Scholar] [CrossRef]
- Wang, X.; Cheng, M.; Eaton, J.; Hsieh, C.J.; Wu, S.F. Fake node attacks on graph convolutional networks. J. Comput. Cogn. Eng. 2022, 1, 165–173. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode Type | Classification Criteria |
|---|---|
| Speed coupling mode | |
| Torque coupling mode | |
| Motor 1 drive mode | |
| Motor 2 drive mode |
| Configuration | Economy (kW·h/100 km) | Driving Range (km) | 0–100 km/h Acceleration Performance (s) | 0–120 km/h Acceleration Performance (s) |
|---|---|---|---|---|
| 1 | 13.6109 | 510.601 | 8.2167 | 10.973 |
| 2 | 13.8769 | 500.799 | 8.872 | 11.7245 |
| 3 | 13.7968 | 503.801 | 9.9881 | 14.4306 |
| 4 | 14.4263 | 481.802 | 11.2671 | 15.9831 |
| 5 | 14.5174 | 478.701 | 10.8425 | 15.3319 |
| Distributed Configuration | 14.5201 | 478.603 | 11.9614 | 16.5649 |
| Reference configuration | 16.4998 | 421.197 | 10.9181 | 15.9099 |
| Component | Speed Coupling Mode | Torque Coupling Mode | Motor 1 Drive Mode | Motor 2 Drive Mode |
|---|---|---|---|---|
| Motor 1 | A | A | A | B |
| Motor 2 | A | A | B | A |
| First clutch | A | A | B | A |
| Second clutch | A | B | B | B |
| Third clutch | B | A | A | B |
| Brakes | B | A | A | A |
| Control Strategy | DP Method | Rule-Based Approach | Research Design Methods | ||
|---|---|---|---|---|---|
| Route 1 | SOC | Initial | 0.9 | 0.9 | 0.9 |
| Terminal | 0.7554 | 0.7412 | 0.7546 | ||
| Power consumption | Energy Economy (kW·h/100 km) | 14.6843 | 15.3185 | 14.7271 | |
| Range (km) | 474 | 458 | 471 | ||
| Mileage difference ratio (%) | 99.79 | 95.87 | 99.86 | ||
| Route 2 | SOC | Initial | 0.9 | 0.9 | 0.9 |
| Terminal | 0.7537 | 0.7368 | 0.7514 | ||
| Power consumption | Energy Economy (kW·h/100 km) | 14.6983 | 15.3623 | 14.7473 | |
| Range (km) | 474 | 454 | 473 | ||
| Mileage difference ratio (%) | 99.61 | 95.58 | 99.72 | ||
| Route 3 | SOC | Initial | 0.9 | 0.9 | 0.9 |
| Terminal | 0.8341 | 0.8217 | 0.8324 | ||
| Power consumption | Energy Economy (kW·h/100 km) | 13.4024 | 14.1562 | 13.4472 | |
| Range (km) | 518 | 492 | 515 | ||
| Mileage difference ratio (%) | 99.53 | 94.73 | 99.59 | ||
| Operational performance | Calculation time for predicting mileage intervals (s) | 2.68 | 0.32 | 0.13 | |
| Applicative categories | Offline | Offline/Online | Offline/Online | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, L. Optimization Effect of the Improved Power System Integrating Composite Motors on the Energy Consumption of Electric Vehicles. World Electr. Veh. J. 2023, 14, 257. https://doi.org/10.3390/wevj14090257
Jia L. Optimization Effect of the Improved Power System Integrating Composite Motors on the Energy Consumption of Electric Vehicles. World Electric Vehicle Journal. 2023; 14(9):257. https://doi.org/10.3390/wevj14090257
Chicago/Turabian StyleJia, Lijun. 2023. "Optimization Effect of the Improved Power System Integrating Composite Motors on the Energy Consumption of Electric Vehicles" World Electric Vehicle Journal 14, no. 9: 257. https://doi.org/10.3390/wevj14090257