
Methodology to Improve an Extended-Range Electric Vehicle Module and Control Integration Based on Equivalent Consumption Minimization Strategy

 , , ,
, , ,  and
and
Abstract
:1. Introduction
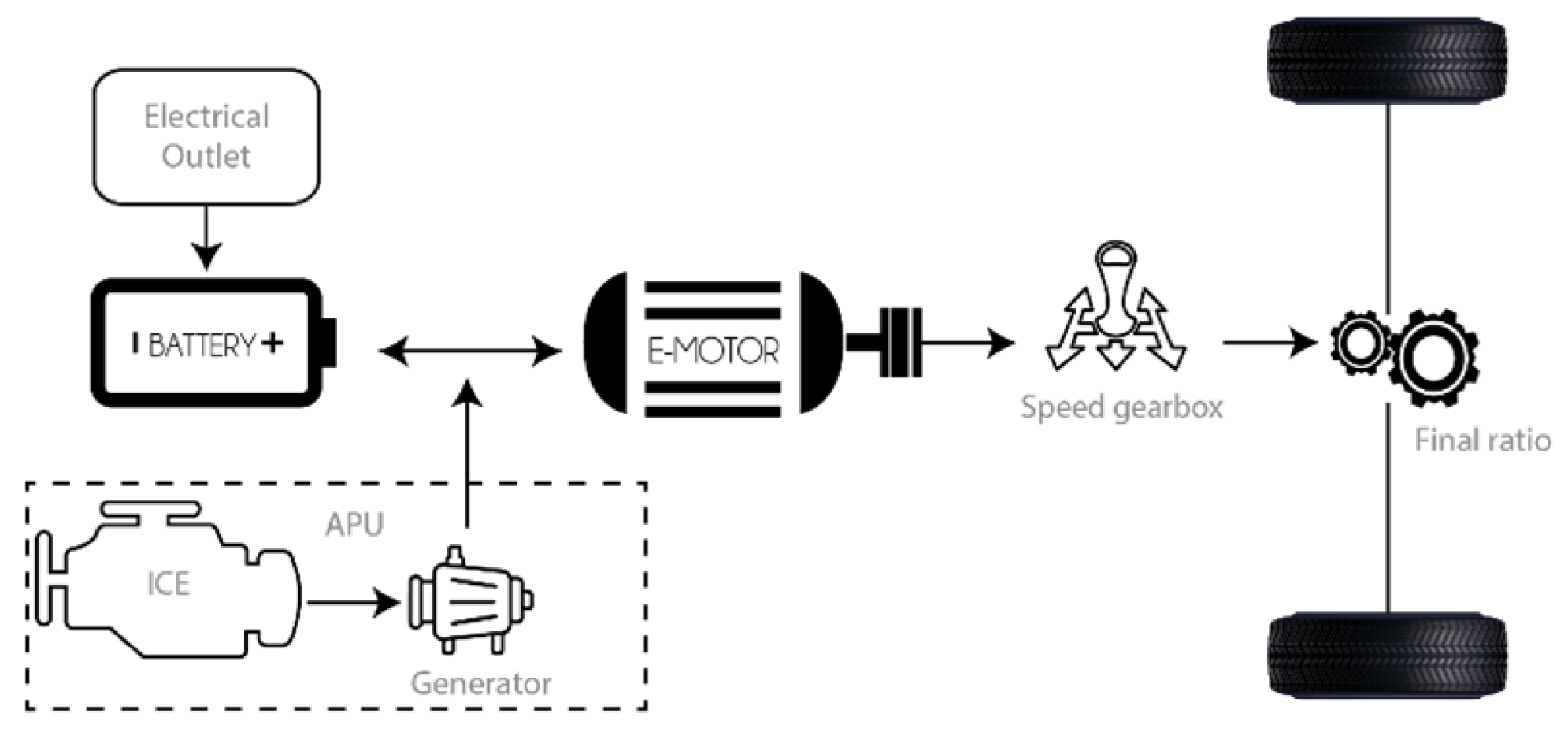
1.1. Energy of Extended-Range Electric Vehicles
1.2. Equivalent Consumption Minimization Strategy Application in EREVs
1.3. Problem Formulation
1.3.1. Global Constraints
1.3.2. Local Constraints
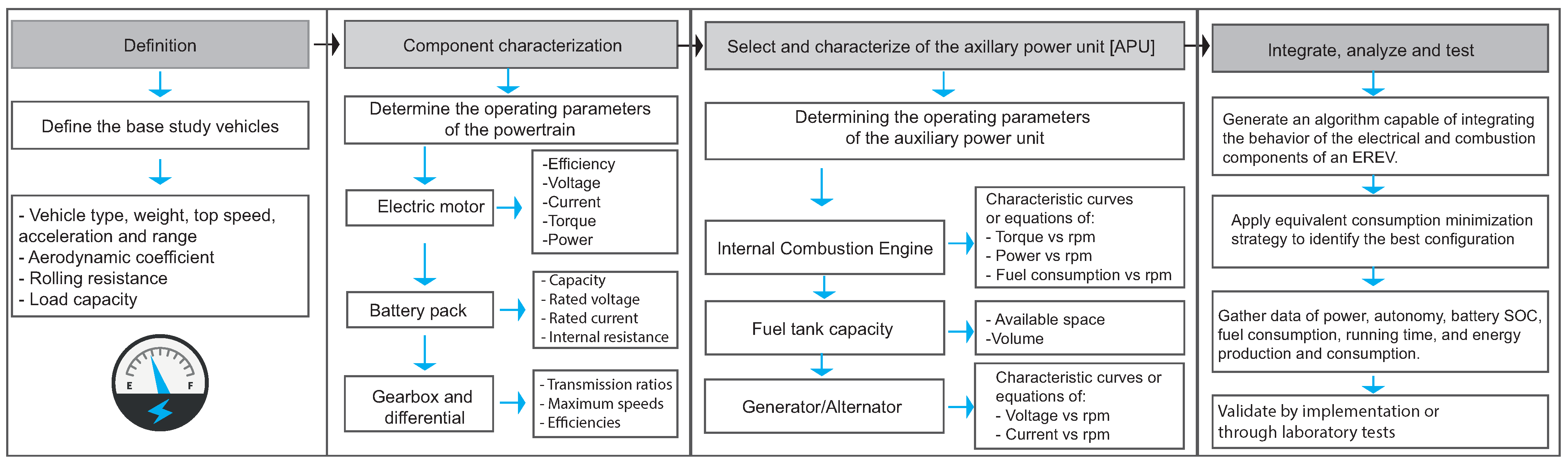
2. Methodology
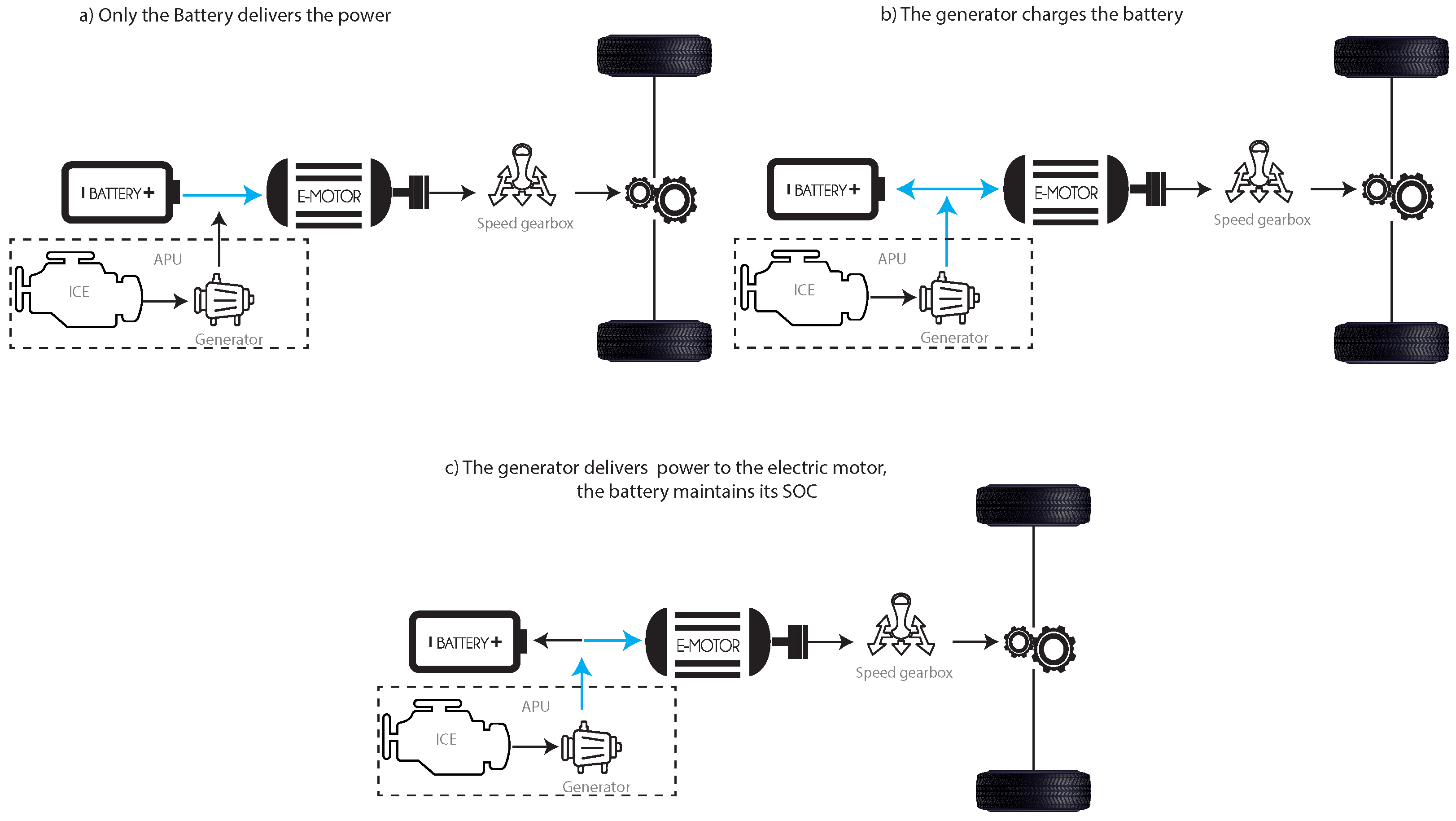
2.1. Algorithm Usage Scenarios
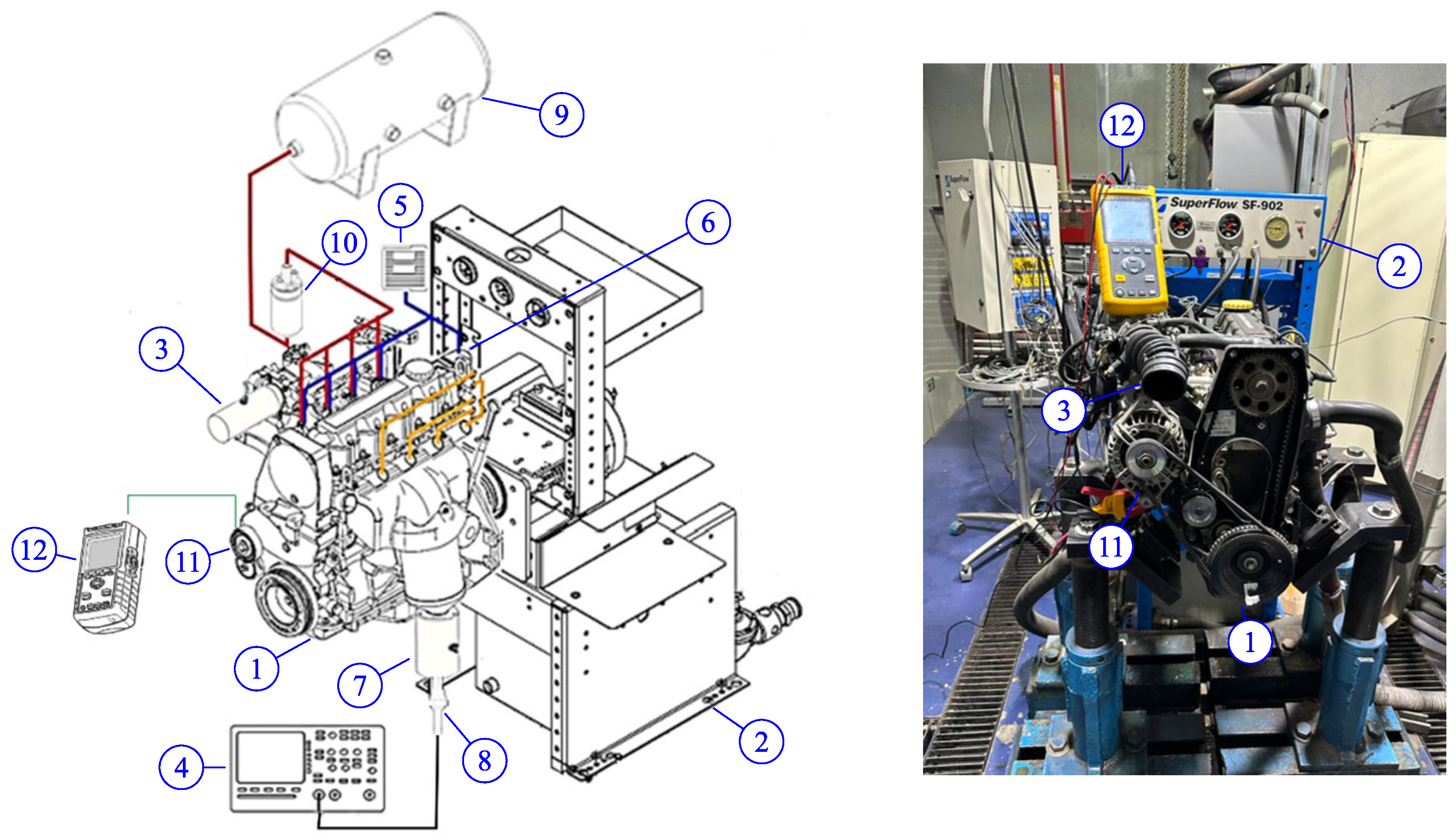
2.2. Test Setup
2.3. Physical Implementation
2.4. Data Acquisition
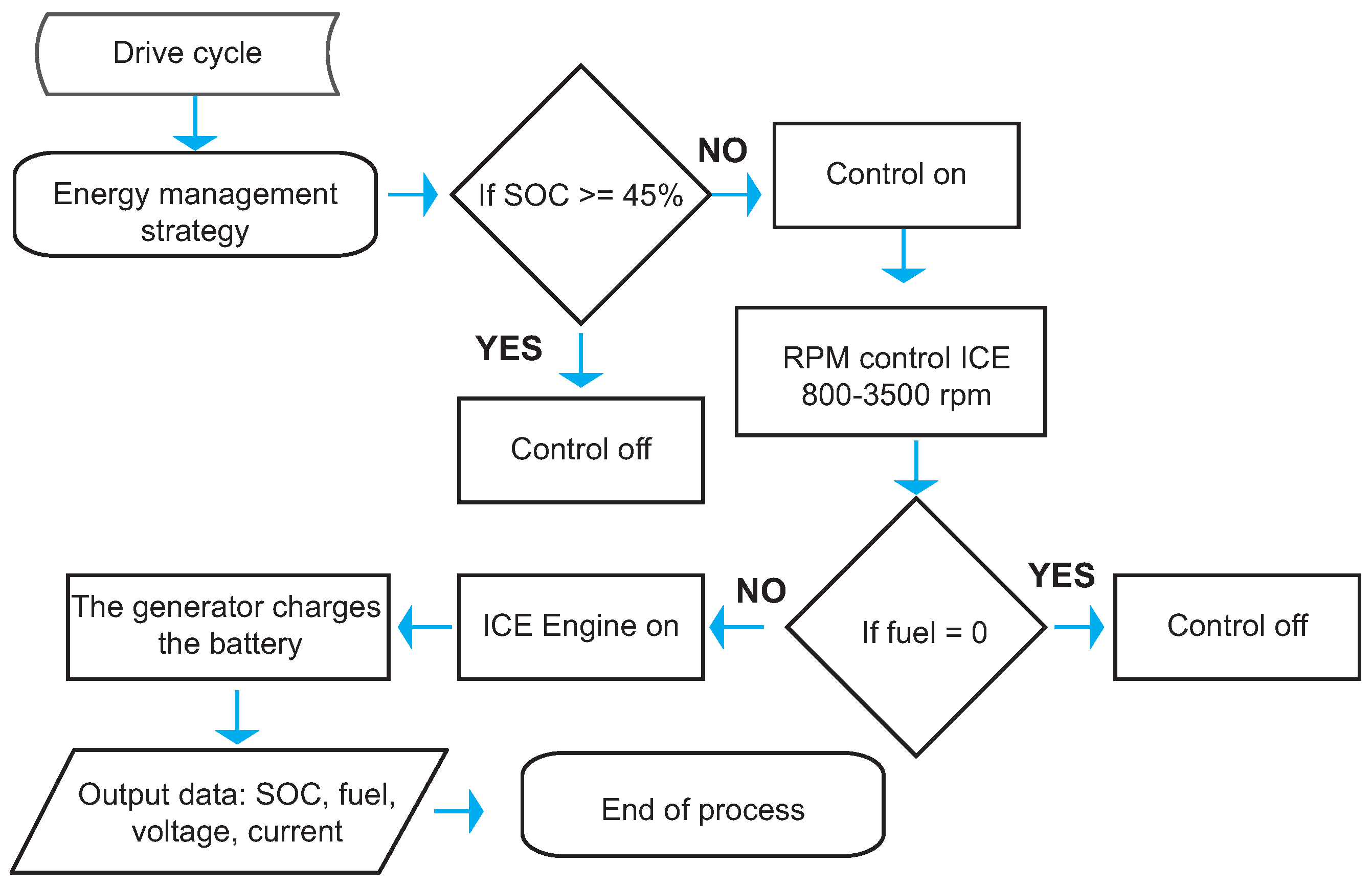
2.5. ECMS-Based Supervisory Control
2.6. Control Integration
3. Experimental Test Vehicle
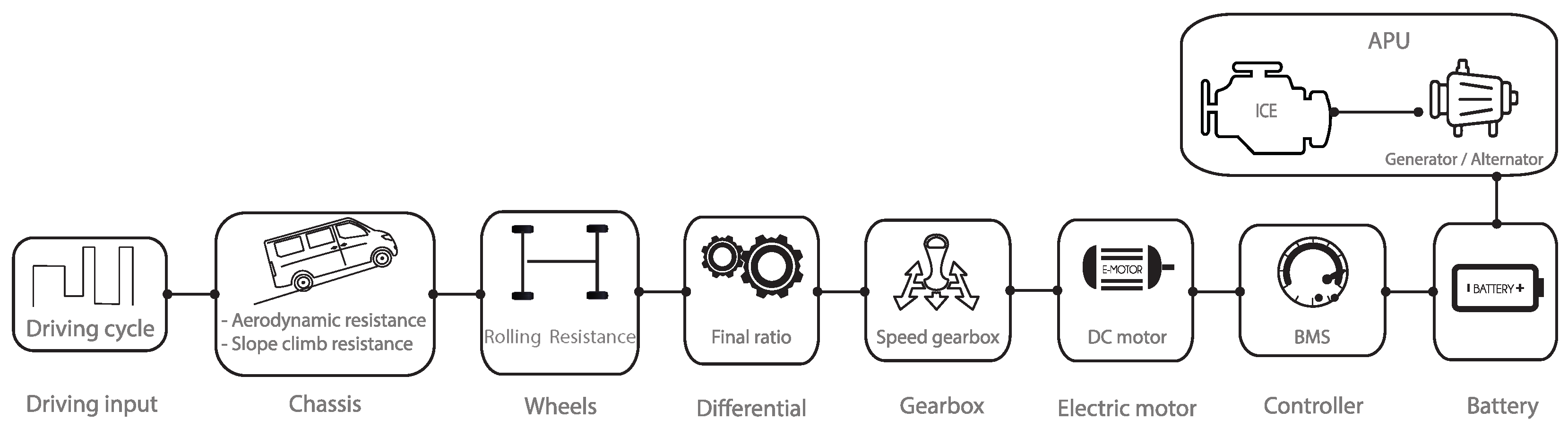
3.1. Electric Vehicle Model Development: Vehicle Dynamics
3.1.1. Rolling Resistance Force
3.1.2. Aerodynamic Drag
3.1.3. Hill Climbing Force
3.1.4. Net Force
3.1.5. Tractive Force
3.1.6. Gradability
3.2. Battery Model
3.3. Auxiliary Power Unit Characterization
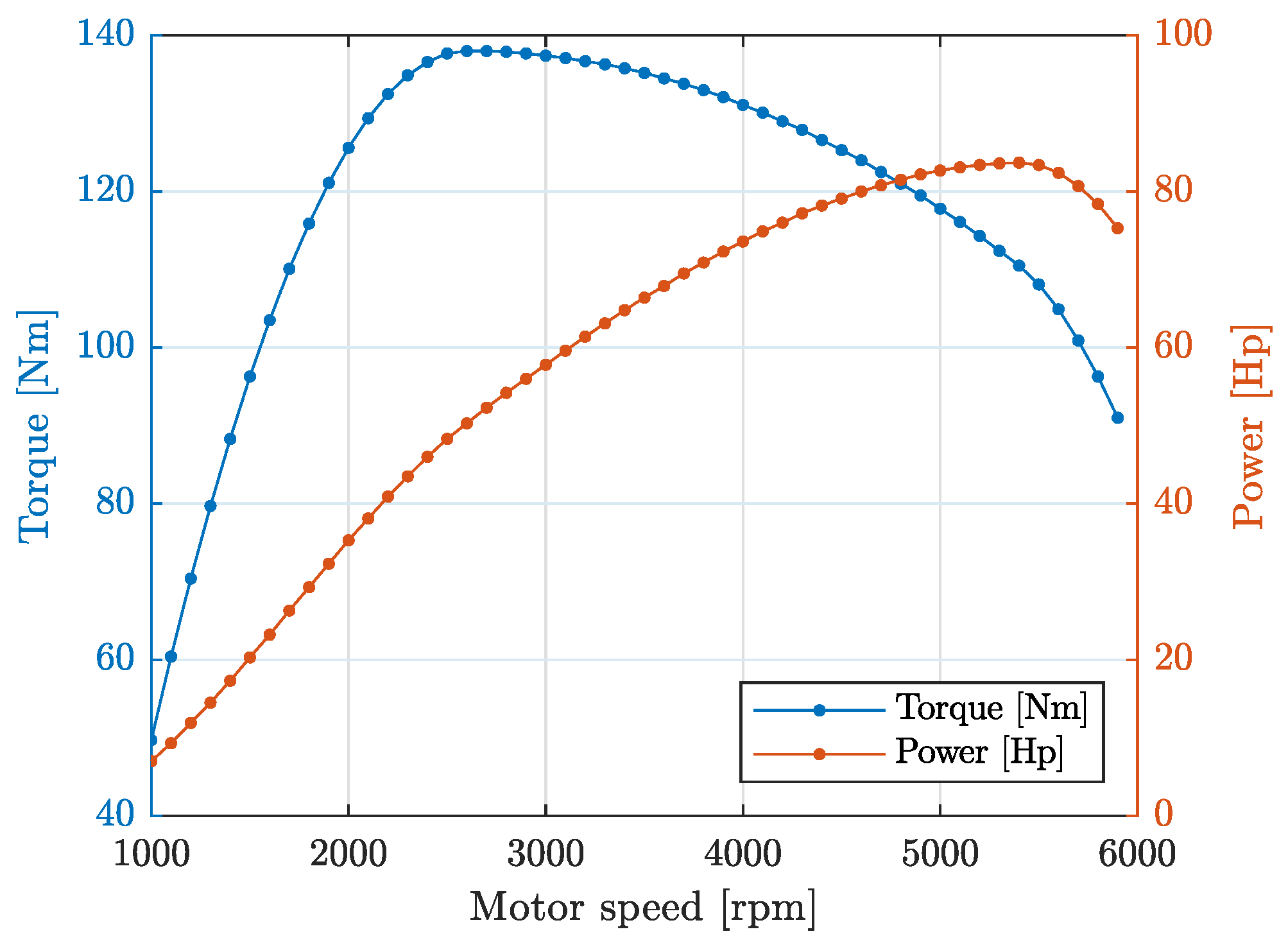
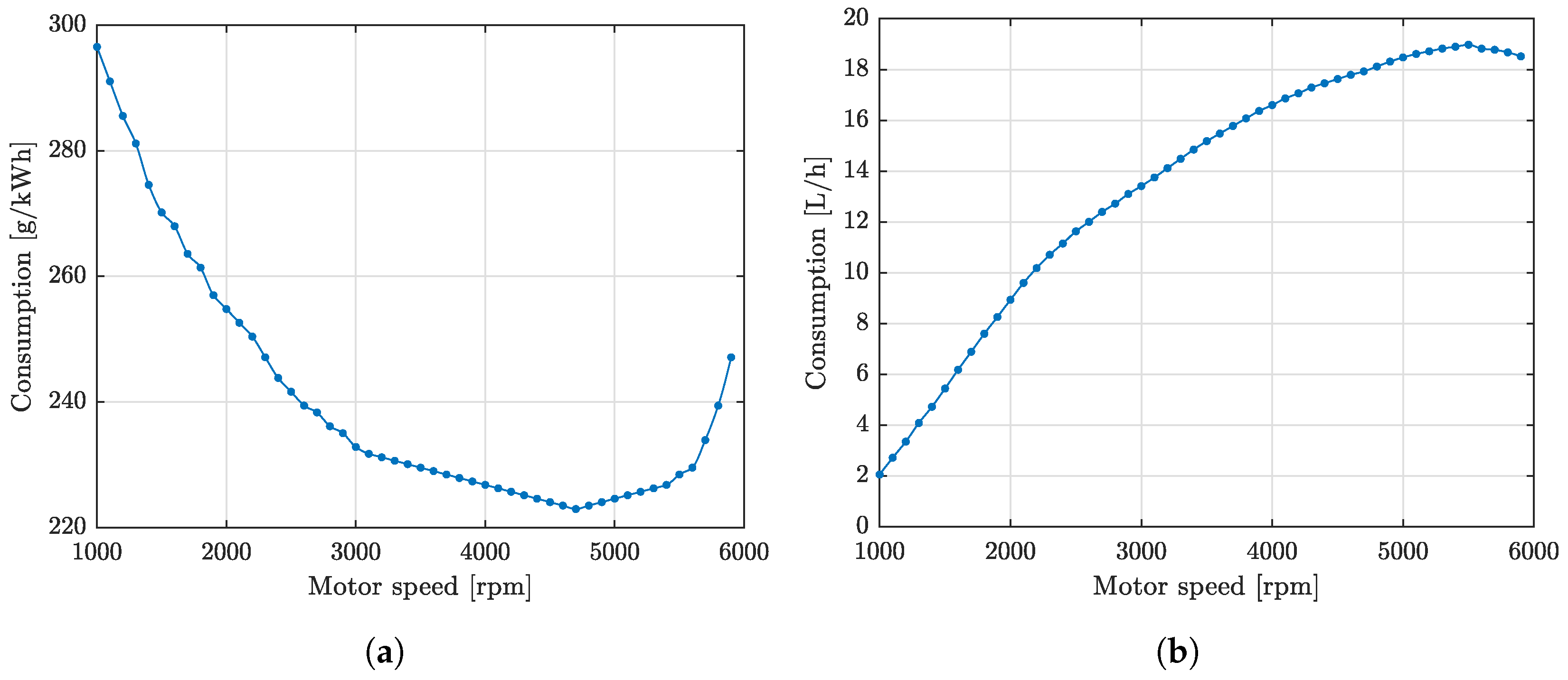
3.3.1. Internal Combustion Engine Characterization
3.3.2. Generator Characterization
3.4. Internal Combustion Engine and Generator Sizing
3.5. Mechanical Load
3.6. Model Development Using MATLAB-Simulink
4. Model Validation and Results
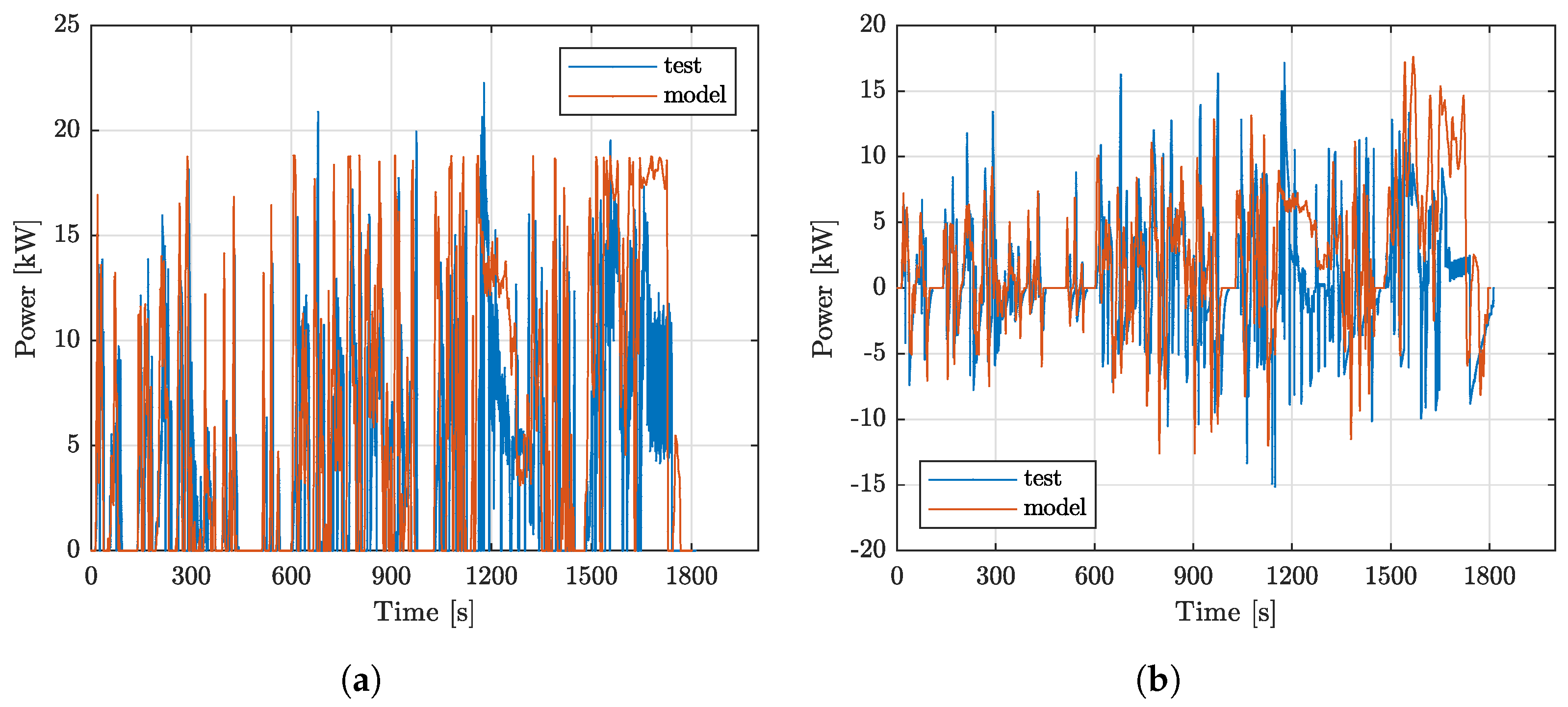
4.1. Model Validation
4.2. Auxiliary Power Unit Integration
4.3. Extra Weight Influence Due to the Integration of the APU in the EREV
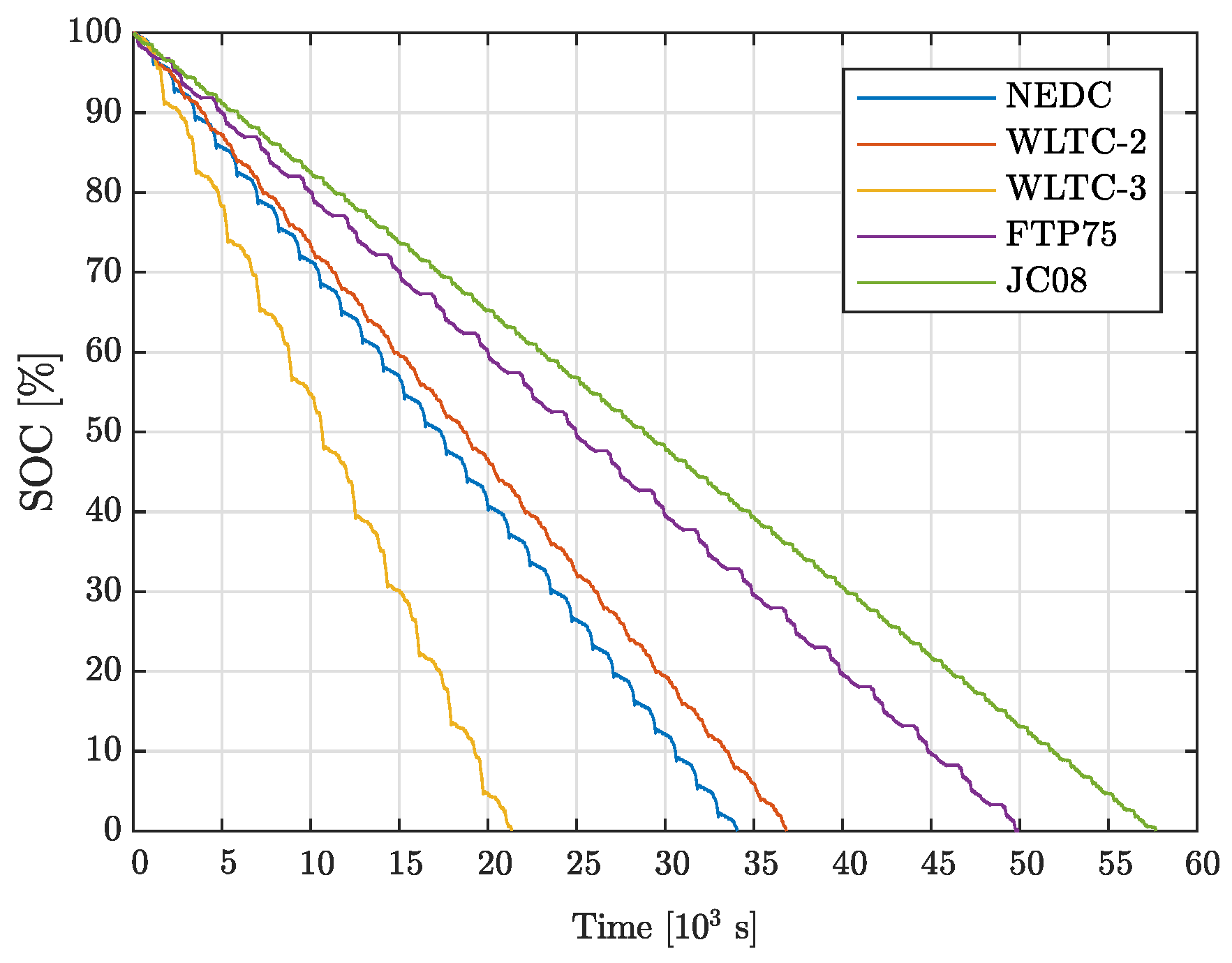
4.4. Analysis of SOC Behavior under Different APU Speeds
4.5. NEDC Analysis
4.6. WLTC-2 Analysis
4.7. WLTC-3 Cycle Analysis
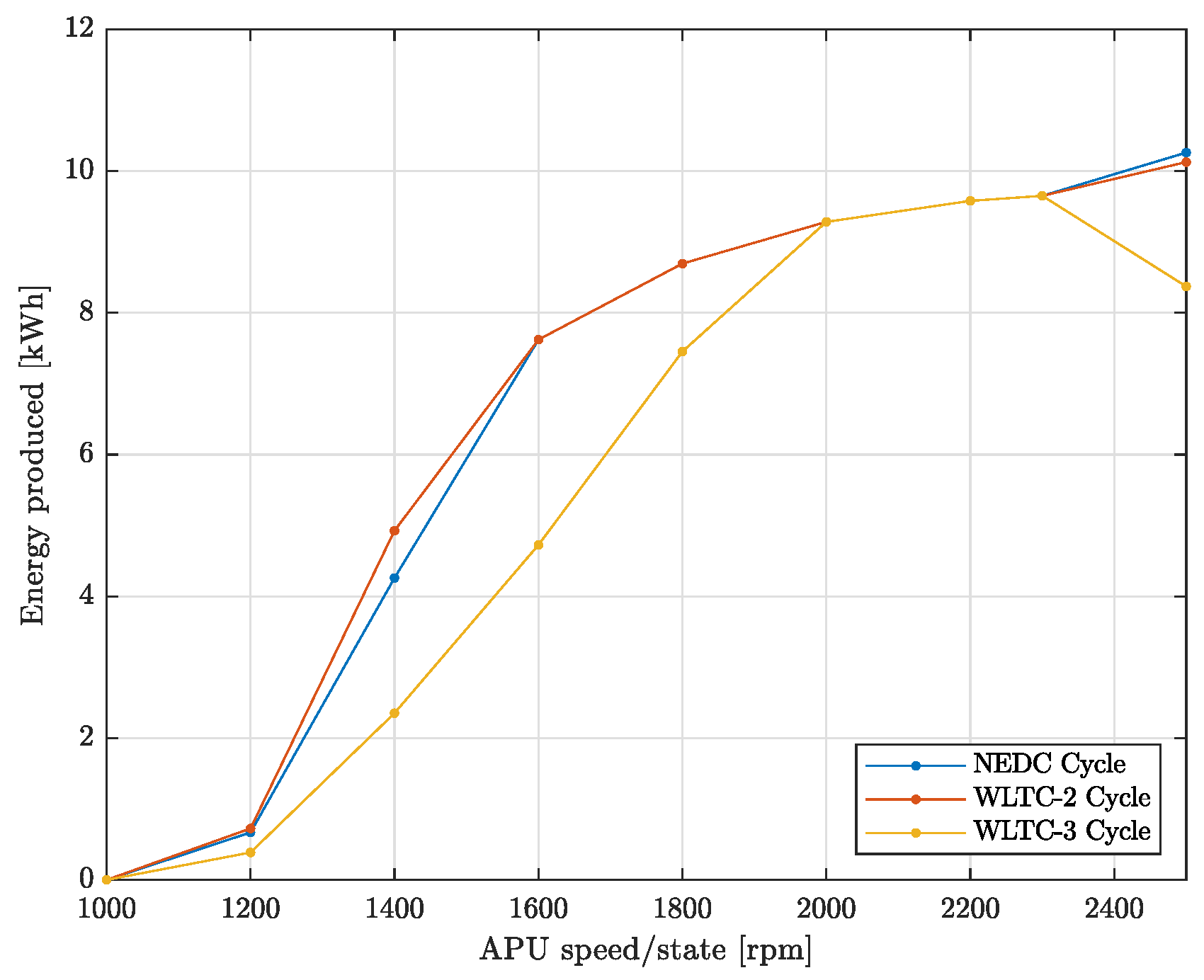
4.8. Equivalent Energy Produced ICE Generator
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| APU | Auxiliary Power Unit |
| BMS | Battery Management System |
| CFD | Computational Fluid Dynamics |
| CO2 | Carbon Dioxide |
| EC | European Commission |
| ECMS | Equivalent Energy Consumption Minimization Strategy |
| EREV | Extended-Range Electric Vehicle |
| EV | Electric Vehicle |
| HEV | Hybrid Electric Vehicle |
| HV | Hybrid Vehicle |
| ICE | Internal Combustion Engine |
| IFAC | International Federation of Automatic Control |
| ISO | International Organization for Standardization |
| Li-ion | Lithium-ion |
| NEDC | New European Drive Cycle |
| PID | Proportional–Integral–Derivative |
| SAE | Society of Automotive Engineers |
| SOC | State of Charge |
| WLTC | Worldwide Harmonized Light Vehicles Test Cycle |
References
- Davis, S.C.; Boundy, R.G. Transportation Energy Data Book; US Department of Energy: Washington, DC, USA, 2022.
- International Energy Agengy. Global EV Outlook 2023; Technical Report Geo; International Energy Agency: Paris, France, 2023. [Google Scholar]
- Jin, Z.; Li, D.; Hao, D.; Zhang, Z.; Guo, L.; Wu, X.; Yuan, Y. Increasing the energy efficiency of an electric vehicle powered by hydrogen fuel cells. Int. J. Hydrogen Energy 2024, 49, 15326–15341. [Google Scholar] [CrossRef]
- Zhang, Z.; Hao, D.; Wu, X.; Yuan, Y. PEM fuel cell as an auxiliary power unit for range-extended hybrid electric vehicles. Energy Convers. Manag. 2021, 256, 114765. [Google Scholar] [CrossRef]
- Chen, J.; Wang, R.; Ding, R.; Luo, D. Matching design and numerical optimization of automotive thermoelectric generator system applied to range-extended electric vehicle. Appl. Energy 2024, 370, 123637. [Google Scholar] [CrossRef]
- Jin, Z.; Li, D.; Hao, D.; Zhang, Z.; Wu, X.; Yuan, Y. A portable, auxiliary photovoltaic power system for electric vehicles based on a foldable scissors mechanism. Energy Built Environ. 2024, 5, 81–96. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, B.; Jiang, J.; Liu, C.; Zhao, D.; Zhou, Q.; Chen, Z.; Lei, Z. Cooperative power management for range extended electric vehicle based on internet of vehicles. Energy 2023, 273, 127238. [Google Scholar] [CrossRef]
- Boretti, A. High-efficiency internal combustion engine for hybrid hydrogen-electric locomotives. Int. J. Hydrogen Energy 2023, 48, 1596–1601. [Google Scholar] [CrossRef]
- BMW i3. Available online: https://en.wikipedia.org/wiki/BMW_i3 (accessed on 1 August 2024).
- Leach, F.; Kalghatgi, G.; Stone, R.; Miles, P. The scope for improving the efficiency and environmental impact of internal combustion engines. Transp. Eng. 2020, 1, 100005. [Google Scholar] [CrossRef]
- Fan, L.; Tu, Z.; Chan, S.H. Prototype design of an extended range electric sightseeing bus with an air-cooled proton exchange membrane fuel cell stack based on a voltage control logic of hydrogen purging. J. Power Sources 2022, 537, 231541. [Google Scholar] [CrossRef]
- Ouyang, T.; Zhao, Z.; Wang, Z.; Zhang, M.; Liu, B. A high-efficiency scheme for waste heat harvesting of solid oxide fuel cell integrated homogeneous charge compression ignition engine. Energy 2021, 229, 120720. [Google Scholar] [CrossRef]
- Hahn, S.; Braun, J.; Kemmer, H.; Reuss, H.C. Optimization of the efficiency and degradation rate of an automotive fuel cell system. Int. J. Hydrogen Energy 2021, 46, 29459–29477. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, H.; Ravey, A.; Péra, M.C. An integrated predictive energy management for light-duty range-extended plug-in fuel cell electric vehicle. J. Power Sources 2020, 451, 227780. [Google Scholar] [CrossRef]
- Hoeflinger, J.; Hofmann, P. Air mass flow and pressure optimisation of a PEM fuel cell range extender system. Int. J. Hydrogen Energy 2020, 45, 29246–29258. [Google Scholar] [CrossRef]
- Toyota. Second Generation Toyota Mirai. Still Zero Emissions. Available online: https://www.toyota-europe.com/world-of-toyota/articles-news-events/2019/new-mirai-concept (accessed on 1 August 2024).
- Hyundai NEXO de pila de Combustible | Hyundai | Hyundai Motor España. Available online: https://www.hyundai.com/es/modelos/nexo.html (accessed on 1 August 2024).
- Nikola Two. Available online: https://nikolamotor.com/two (accessed on 1 August 2024).
- Taner, T. The novel and innovative design with using H 2 fuel of PEM fuel cell: Efficiency of thermodynamic analyze. Fuel 2021, 302, 121109. [Google Scholar] [CrossRef]
- Shen, X.; Costall, A.; Turner, M.; Islam, R.; Ribnishki, A.; Turner, J.; Vorraro, G.; Bailey, N.; Addy, S. Large-Eddy simulation of a Wankel rotary engine for range extender applications. In Powertrain Systems for Net-Zero Transport; Institution of Mechanical Engineers: Bath, UK, 2024; pp. 173–194. [Google Scholar] [CrossRef]
- Ji, C.; Wang, H.; Shi, C.; Wang, S.; Yang, J. Multi-objective optimization of operating parameters for a gasoline Wankel rotary engine by hydrogen enrichment. Energy Convers. Manag. 2021, 229, 113732. [Google Scholar] [CrossRef]
- Sadiq, G.A.; Al-Dadah, R.; Mahmoud, S. Development of rotary Wankel devices for hybrid automotive applications. Energy Convers. Manag. 2019, 202, 112159. [Google Scholar] [CrossRef]
- Mazda 2 RE Range-Extender: Return of the Rotary—News—Car and Driver. Available online: https://www.caranddriver.com/news/a15366035/mazda-2-re-range-extender-return-of-the-rotary/ (accessed on 1 August 2024).
- Zhao, J.; Ma, Y.; Zhang, Z.; Wang, S.; Wang, S. Optimization and matching for range-extenders of electric vehicles with artificial neural network and genetic algorithm. Energy Convers. Manag. 2019, 184, 709–725. [Google Scholar] [CrossRef]
- Li, W.; Xu, H.; Liu, X.; Wang, Y.; Zhu, Y.; Lin, X.; Zhang, Y. Energy recovery control strategy for electric vehicles based on fuzzy neural network. Ain Shams Eng. J. 2024, 15, 102430. [Google Scholar] [CrossRef]
- Dong, P.; Li, J.; Yao, K.; Li, S.; Wang, S.; Xu, X.; Guo, W. Downshifting strategy of plug-in hybrid vehicle during braking process for greater regenerative energy. Control Eng. Pract. 2024, 152, 106049. [Google Scholar] [CrossRef]
- Wu, D.; Feng, L. On-Off Control of Range Extender in Extended-Range Electric Vehicle using Bird Swarm Intelligence. Electronics 2019, 8, 1223. [Google Scholar] [CrossRef]
- Shah, R.M.R.A.; McGordon, A.; Rahman, M.M.; Amor-Segan, M.; Jennings, P. Characterisation of micro turbine generator as a range extender using an automotive drive cycle for series hybrid electric vehicle application. Appl. Therm. Eng. 2021, 184, 116302. [Google Scholar] [CrossRef]
- Kim, H.; Nutakor, C.; Singh, S.; Jaatinen-Värri, A.; Nerg, J.; Pyrhönen, J.; Sopanen, J. Design process and simulations for the rotor system of a high-efficiency 22 kW micro-gas-turbine range extender for electric vehicles. Mech. Mach. Theory 2023, 183, 105230. [Google Scholar] [CrossRef]
- Ezzat, M.F.; Dincer, I. Development and exergetic assessment of a new hybrid vehicle incorporating gas turbine as powering option. Energy 2019, 170, 112–119. [Google Scholar] [CrossRef]
- Ji, F.; Zhang, X.; Du, F.; Ding, S.; Zhao, Y.; Xu, Z.; Wang, Y.; Zhou, Y. Experimental and numerical investigation on micro gas turbine as a range extender for electric vehicle. Appl. Therm. Eng. 2020, 173, 115236. [Google Scholar] [CrossRef]
- Barakat, A.A.; Diab, J.H.; Badawi, N.S.; Bou Nader, W.S.; Mansour, C.J. Combined cycle gas turbine system optimization for extended range electric vehicles. Energy Convers. Manag. 2020, 226, 113538. [Google Scholar] [CrossRef]
- Fathabadi, H. Utilizing solar and wind energy in plug-in hybrid electric vehicles. Energy Convers. Manag. 2018, 156, 317–328. [Google Scholar] [CrossRef]
- Fathabadi, H. Recovering waste vibration energy of an automobile using shock absorbers included magnet moving-coil mechanism and adding to overall efficiency using wind turbine. Energy 2019, 189, 116274. [Google Scholar] [CrossRef]
- Goushcha, O.; Felicissimo, R.; Danesh-Yazdi, A.H.; Andreopoulos, Y. Exploring harnessing wind power in moving reference frames with application to vehicles. Adv. Mech. Eng. 2019, 11, 168781401986568. [Google Scholar] [CrossRef]
- Industrial Corporation Minuto de Dios Javier Roldán. Meet Eolo, A Wind-Powered EV From Colombia; Industrial Corporation Minuto de Dios Javier Roldán: Antioquia, Colombia, 2021. [Google Scholar]
- Sun, B.; Li, B.; Xing, J.; Yu, X.; Xie, M.; Hu, Z. Analysis of the influence of electric flywheel and electromechanical flywheel on electric vehicle economy. Energy 2024, 295, 131069. [Google Scholar] [CrossRef]
- Barelli, L.; Bidini, G.; Bonucci, F.; Castellini, L.; Fratini, A.; Gallorini, F.; Zuccari, A. Flywheel hybridization to improve battery life in energy storage systems coupled to RES plants. Energy 2019, 173, 937–950. [Google Scholar] [CrossRef]
- Li, J.; Zhao, J. Energy recovery for hybrid hydraulic excavators: Flywheel-based solutions. Autom. Constr. 2021, 125, 103648. [Google Scholar] [CrossRef]
- Erdemir, D.; Dincer, I. Assessment of Renewable Energy-Driven and Flywheel Integrated Fast-Charging Station for Electric Buses: A Case Study. J. Energy Storage 2020, 30, 101576. [Google Scholar] [CrossRef]
- Wang, W.; Li, Y.; Shi, M.; Song, Y. Optimization and control of battery-flywheel compound energy storage system during an electric vehicle braking. Energy 2021, 226, 120404. [Google Scholar] [CrossRef]
- Fan, T.; Liang, W.; Guo, W.; Feng, T.; Li, W. Life cycle assessment of electric vehicles’ lithium-ion batteries reused for energy storage. J. Energy Storage 2023, 71, 108126. [Google Scholar] [CrossRef]
- Bou Nader, W.; Chamoun, J.; Dumand, C. Thermoacoustic engine as waste heat recovery system on extended range hybrid electric vehicles. Energy Convers. Manag. 2020, 215, 112912. [Google Scholar] [CrossRef]
- Nader, W.B.; Chamoun, J.; Dumand, C. Optimization of the thermodynamic configurations of a thermoacoustic engine auxiliary power unit for range extended hybrid electric vehicles. Energy 2020, 195, 116952. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, X.; Chen, W.; Rasim, Y.; Salman, W.; Pan, H.; Yuan, Y.; Wang, C. A high-efficiency energy regenerative shock absorber using supercapacitors for renewable energy applications in range extended electric vehicle. Appl. Energy 2016, 178, 177–188. [Google Scholar] [CrossRef]
- Kiddee, K.; Sukcharoensup, T. Efficiency Analysis of Suspension Energy Harvesting besed on Supercapacitor for Electric Vehicles. In Proceedings of the 2020 8th International Electrical Engineering Congress (iEECON), Chiang Mai, Thailand, 4–6 March 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Swamy, V.M.M.; Vidyasagar, S. High-efficiency regenerative shock absorbers considering twin ball screws transmission for increasing the vehicles’ driving range using a hybrid approach. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2024, 238, 141–157. [Google Scholar] [CrossRef]
- Siemens. Facts about Climate-Friendly Road Freight Transportation, Operational Range; Siemens: Munich, Germany, 2021; pp. 1–4. [Google Scholar]
- Qiu, K.; Ribberink, H.; Entchev, E. Economic feasibility of electrified highways for heavy-duty electric trucks. Appl. Energy 2022, 326, 119935. [Google Scholar] [CrossRef]
- Puma-Benavides, D.S.; Mixquititla-Casbis, L.; Llanes-Cedeño, E.A.; Jima-Matailo, J.C. Impact of Temperature Variations on Torque Capacity in Shrink-Fit Junctions of Water-Jacketed Permanent Magnet Synchronous Motors (PMSMs). World Electr. Veh. J. 2024, 15, 282. [Google Scholar] [CrossRef]
- Puma-Benavides, D.S.; Izquierdo-Reyes, J.; Galluzzi, R.; Calderon-Najera, J.d.D. Influence of the final ratio on the consumption of an electric vehicle under conditions of standardized driving cycles. Appl. Sci. 2021, 11, 1474. [Google Scholar] [CrossRef]
- Almousa, M.T.; Rezk, H.; Alahmer, A. Optimized Equivalent Consumption Minimization Strategy-based Artificial Hummingbird Algorithm for Electric Vehicles. Front. Energy Res. 2024, 12, 1344341. [Google Scholar] [CrossRef]
- Du, A.; Chen, Y.; Zhang, D.; Han, Y. Multi-Objective Energy Management Strategy Based on PSO Optimization for Power-Split Hybrid Electric Vehicles. Energies 2021, 14, 2438. [Google Scholar] [CrossRef]
- Yao, D.; Lu, X.; Chao, X.; Zhang, Y.; Shen, J.; Zeng, F.; Zhang, Z.; Wu, F. Adaptive Equivalent Fuel Consumption Minimization Based Energy Management Strategy for Extended-Range Electric Vehicle. Sustainability 2023, 15, 4607. [Google Scholar] [CrossRef]
- Onori, S.; Serrao, L.; Rizzoni, G. Hybrid Electric Vehicles: Energy Management Strategies; Springer: London, UK, 2016; Volume 13. [Google Scholar]
- Lei, Z.; Qin, D.; Hou, L.; Peng, J.; Liu, Y.; Chen, Z. An adaptive equivalent consumption minimization strategy for plug-in hybrid electric vehicles based on traffic information. Energy 2020, 190, 116409. [Google Scholar] [CrossRef]
- Puma-Benavides, D.S.; Izquierdo-reyes, J.; Calderon-najera, J.D.D.; Ramirez-mendoza, R.A. A Systematic Review of Technologies, Control Methods, and Optimization for Extended-Range Electric Vehicles. Appl. Sci. 2021, 11, 7095. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Z.; Liu, P.; Zhang, Z.; Li, X.; Qu, C. Driving cycles construction for electric vehicles considering road environment: A case study in Beijing. Appl. Energy 2019, 253, 113514. [Google Scholar] [CrossRef]
- Yang, H.; Wu, J.; Chen, F.; Guo, Z.; Xue, X.; Chen, Y.; Xu, G. Life cycle climate performance evaluation of electric vehicle thermal management system under Chinese climate and driving condition. Appl. Therm. Eng. 2023, 228, 120460. [Google Scholar] [CrossRef]
- Wu, A.; Zhang, Z.; Shi, X.; Liu, C. Modeling the role of interfacial adhesion in the rolling resistance of a hyperelastic wheel. Tribol. Int. 2023, 185, 108494. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, Y.; Ye, M.; Zhang, Y.; Li, G. A survey on key techniques and development perspectives of equivalent consumption minimisation strategy for hybrid electric vehicles. Renew. Sustain. Energy Rev. 2021, 151, 111607. [Google Scholar] [CrossRef]
- Anselma, P.G.; Biswas, A.; Belingardi, G.; Emadi, A. Rapid assessment of the fuel economy capability of parallel and series-parallel hybrid electric vehicles. Appl. Energy 2020, 275, 115319. [Google Scholar] [CrossRef]
- Zhuotong, L.; Yi, Z.; Yun, J.; Fang, F. Rule-Based Dual Planning Strategy of Hybrid Battery Energy Storage System. IFAC-PapersOnLine 2022, 55, 495–500. [Google Scholar] [CrossRef]
- ISO 28580; Passenger Car, Truck and Bus Tyre Rolling Resistance Measurement Method—Single Point Test and Correlation of Measurement Results. International Organization for Standardization: Geneva, Switzerland, 2018.
- Puma-Benavides, D.S.; Cevallos-Carvajal, A.S.; Masaquiza-Yanzapanta, A.G.; Quinga-Morales, M.I.; Moreno-Pallares, R.R.; Usca-Gomez, H.G.; Murillo, F.A. Comparative Analysis of Energy Consumption between Electric Vehicles and Combustion Engine Vehicles in High-Altitude Urban Traffic. World Electr. Veh. J. 2024, 15, 355. [Google Scholar] [CrossRef]
- Cabir, B.; Yakin, A. Evaluation of gasoline-phthalocyanines fuel blends in terms of engine performance and emissions in gasoline engines. J. Energy Inst. 2024, 112, 101483. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology System | Power Provided | Additional Range | Efficiency | Emissions |
|---|---|---|---|---|
| Internal Combustion Engine | 25 kW [7] 750 kW [8] | 330 km [9] 60.36 km [7] | 20–40% [10] 46% [8] | Low |
| Fuel cell | 1.1 kW [11] 20 kW [12] 85–83 kW [13] 1200 W [14] 25 kW [15] 128 kW [16] | 30 km [11] 500 km [12] 650 km [16] 665 km [17] 594 km [17] 1500 km [18] | 98% [11] 70% [12] 63.6–72.4% [19] 43% [14] 55.21% [15] | No |
| Rotary engine | 30 kW [20] 3.8 kW [21] 20 kW [22] | 80 km [22] 321 km [23] | 78% [21] 77% [22] | Low |
| Regenerative Braking System | 14.8 kW [24] 6671.52 kJ [25] | up to 38% SOC increase [26] | 79–94% [24] 30–60% [27] 19–40% [25] | No |
| Micro-Gas Turbine | 25 kW [28] 22 kW [29] 63.3 kW [30] | 370 km [31] | 25% [28] 35% [31] 38% [30] 47.2% [32] | Low |
| Photovoltaic Cell | 68.2–300 W [33] | 19.6 km [33] | 91.2% [33] 20.2–23% [33] | No |
| Wind Turbine | 2.64 kW [34] 0.1–1.1 kW [35] | up to 10% [36] 7.27 km [34] | 75% [34] 75–90% [35] | Low |
| Flywheel Energy Storage | 0.67 kWh [37] 11 kW [38] 60–101 kW [39] 1–20 kW [40] | 4.49% extra [37] 50% mileage over [39] 17% mileage over [41] | 75.92% [37] 60% [39] 90–98% [38,42] | No |
| Thermoacoustic Engine | up to 14 kW [43] 25 kW [44] | 5.5–7% [43] 80% fuel consumption savings [44] | 33.8–38.7% [43] 34–40% [44] 18% [13] | Low |
| Regenerative Shock Absorber | 4.302 W [45] 8.12 W [46] 8–40 W [39] | Can power an 8 W lidar for 323 days or a 2 W camera for 1292 days [39] | 44.24% [45] 38.70–67.29% [46] 97.54% [47] 70–80% [39] | No |
| Pantograph | 670 kW [48] | Unlimited as long as overhead lines exist [49] | >80% [49] | No |
| Description | Symbol | Unit | Value |
|---|---|---|---|
| Powertrain configuration | − | − | Central electric motor with |
| five-speed transmission and | |||
| final drive ratio | |||
| Vehicle mass | m | 1370 | |
| Battery pack capacity | − | 32 (Li-ion cells) | |
| Nominal voltage | 105 | ||
| Maximum capacity | Q | 304 | |
| Initial state-of-charge | − | % | 100 |
| Internal resistance | 0.07 | ||
| Nominal current discharge | i | 160 | |
| Exponential voltage | 106 | ||
| Exponential capacity | 260 | ||
| Frontal area | A | 2.15 | |
| Drag coefficient | − | 0.436 | |
| Rolling resistance coefficient | − | ||
| Gearbox efficiency | − | 0.95 | |
| First shift ratio | − | 3.636 | |
| Second shift ratio | − | 1.9641 | |
| Third shift ratio | − | 1.428 | |
| Fourth shift ratio | − | 1 | |
| Fifth shift ratio | − | 0.801 | |
| Final ratio efficiency | − | 0.95 | |
| Final ratio | − | 4.3 | |
| Maximum torque | − | 691.51 | |
| Maximum power | − | 25.92 | |
| Maximum speed | − | 117 |
| Driving Cycle | Energy [kWh] | Time [s] | Travel Dist. [km] |
|---|---|---|---|
| NEDC | 39.70 | 34,065 | 315.57 |
| WLTC-2 | 40.01 | 36,835 | 382.98 |
| WLTC-3 | 33.99 | 21,341 | 306.78 |
| FTP75 | 48.61 | 49,932 | 472.71 |
| JC08 | 50.56 | 57,672 | 391.39 |
| Condition | Energy Cons. [kWh] | Travel Time [h] | Travel Dist. [km] | Improvement [%] |
|---|---|---|---|---|
| APU off | 39.70 | 9.46 | 315.57 | - |
| APU on/2300 | 48.19 | 12.73 | 424.49 | 34.52 |
| APU on w/control | 49.40 | 12.74 | 425.06 | 34.70 |
| Condition | Energy Cons. [kWh] | Travel Time [h] | Travel Dist. [km] | Improvement [%] |
|---|---|---|---|---|
| APU off | 40.01 | 10.23 | 382.98 | - |
| APU on/2300 | 48.65 | 13.84 | 518.39 | 35.36 |
| APU on w/control | 50.34 | 14.25 | 533.42 | 39.28 |
| Condition | Energy Cons. [kWh] | Travel Time [h] | Travel Dist. [km] | Improvement [%] |
|---|---|---|---|---|
| APU off | 37.60 | 5.93 | 306.78 | - |
| APU on/2300 | 45.18 | 7.92 | 410.30 | 33.74 |
| APU on w/control | 44.22 | 7.35 | 380.21 | 23.94 |
| Speed or State [rpm] | Eq. Energy NEDC [kWh] | Eq. Energy WLTC-2 [kWh] | Eq. Energy WLTC-3 [kWh] |
|---|---|---|---|
| APU off | 0 | 0 | 0 |
| 1200 | 0.67 | 0.73 | 0.39 |
| 1400 | 4.26 | 4.93 | 2.35 |
| 1600 | 7.62 | 7.62 | 4.73 |
| 1800 | 8.69 | 8.69 | 7.45 |
| 2000 | 9.28 | 9.28 | 9.28 |
| 2200 | 9.58 | 9.58 | 9.58 |
| 2300 | 9.65 | 9.65 | 9.65 |
| APU on w/control | 10.26 | 10.26 | 8.37 |
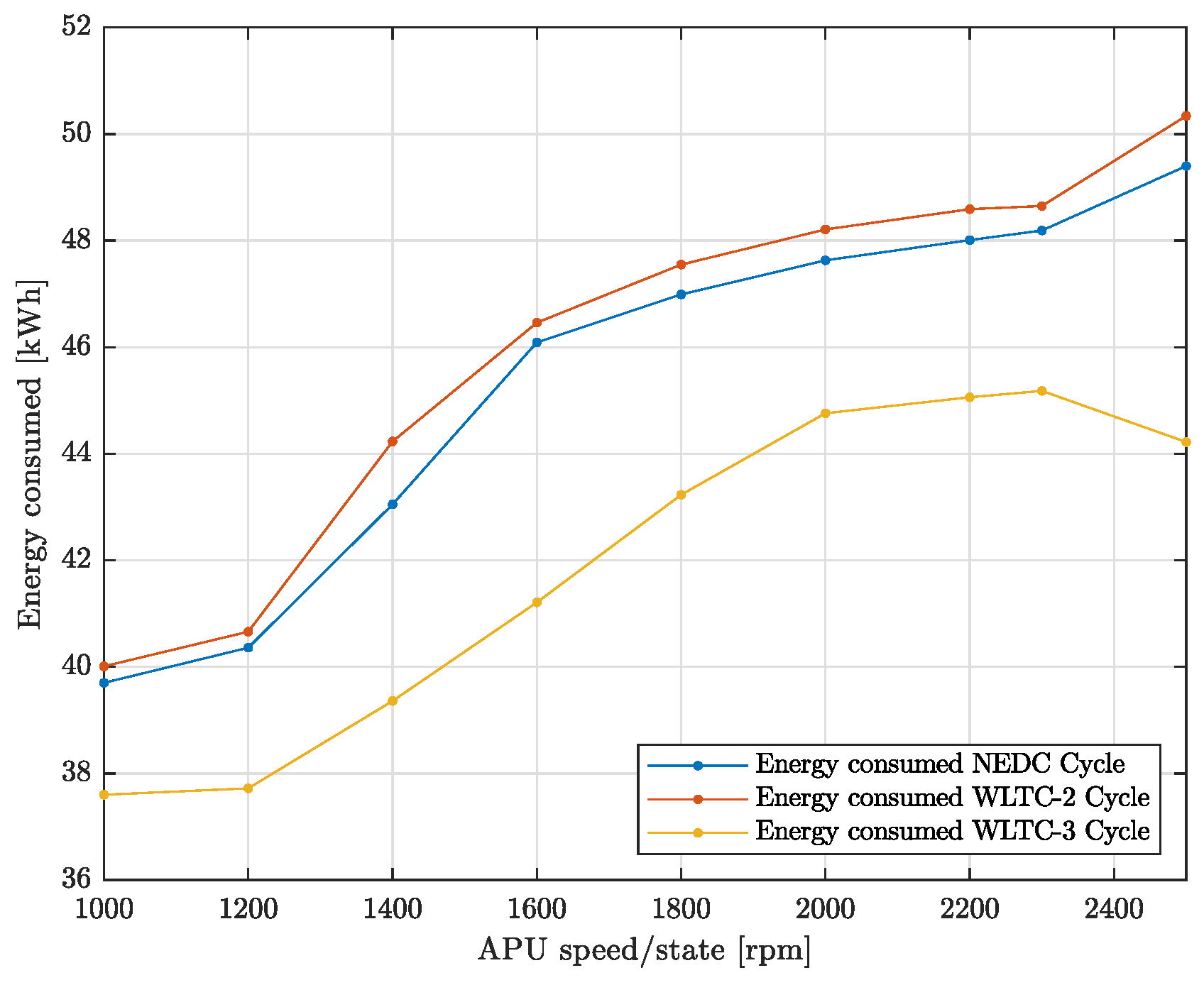
| Speed or State [rpm] | Energy Cons. NEDC [kWh] | Energy Cons. WLTC-2 [kWh] | Energy Cons. WLTC-3 [kWh] |
|---|---|---|---|
| APU off | 39.7 | 40.01 | 37.6 |
| 1200 | 40.36 | 40.66 | 37.72 |
| 1400 | 43.05 | 44.23 | 39.36 |
| 1600 | 46.09 | 46.46 | 41.21 |
| 1800 | 46.99 | 47.55 | 43.23 |
| 2000 | 47.63 | 48.21 | 44.76 |
| 2200 | 48.01 | 48.59 | 45.06 |
| 2300 | 48.19 | 48.65 | 45.18 |
| APU on w/control | 49.4 | 50.34 | 44.22 |
| Speed or State [rpm] | Travel Dist. NEDC [km] | Travel Dist. WLTC-2 [km] | Travel Dist. WLTC-3 [km] |
|---|---|---|---|
| APU off | 315.57 | 382.98 | 306.78 |
| 1200 | 324.29 | 395.52 | 307.78 |
| 1400 | 360.1 | 463.95 | 332.27 |
| 1600 | 402.19 | 488.76 | 358.03 |
| 1800 | 413.63 | 504.01 | 384.84 |
| 2000 | 420.28 | 513.94 | 406.07 |
| 2200 | 424.21 | 518.12 | 409.93 |
| 2300 | 424.49 | 518.39 | 410.3 |
| APU on w/control | 425.06 | 533.42 | 380.21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Puma-Benavides, D.S.; Calderon-Najera, J.d.D.; Izquierdo-Reyes, J.; Galluzzi, R.; Llanes-Cedeño, E.A. Methodology to Improve an Extended-Range Electric Vehicle Module and Control Integration Based on Equivalent Consumption Minimization Strategy. World Electr. Veh. J. 2024, 15, 439. https://doi.org/10.3390/wevj15100439
Puma-Benavides DS, Calderon-Najera JdD, Izquierdo-Reyes J, Galluzzi R, Llanes-Cedeño EA. Methodology to Improve an Extended-Range Electric Vehicle Module and Control Integration Based on Equivalent Consumption Minimization Strategy. World Electric Vehicle Journal. 2024; 15(10):439. https://doi.org/10.3390/wevj15100439
Chicago/Turabian StylePuma-Benavides, David Sebastian, Juan de Dios Calderon-Najera, Javier Izquierdo-Reyes, Renato Galluzzi, and Edilberto Antonio Llanes-Cedeño. 2024. "Methodology to Improve an Extended-Range Electric Vehicle Module and Control Integration Based on Equivalent Consumption Minimization Strategy" World Electric Vehicle Journal 15, no. 10: 439. https://doi.org/10.3390/wevj15100439