Abstract
This research presents the design of a brake fluid pressure warning and control system for autonomous vehicles (AVs) used on university campuses to control brake fluid pressure and measure the proximity of objects or obstacles in front of the vehicles using LiDAR. The goal was to reduce the jerking of the vehicle caused by the conventional braking system, which may cause danger to the user. We initially changed the existing brake system, which uses human braking force, to electric motor braking and tested it in a closed area (a test track) before actual use. This research was divided into two parts: Part 1—using LiDAR to create warnings in case there are obstacles in front of the vehicle and Part 2—controlling brake fluid pressure using a linear motor and a PD controller. Under the test conditions employed, at a speed of 20 km/h, the total load of passengers is 600 kg. The design results regarding the PD controller with the most suitable values of the system that prevent the vehicle from jerking are KD = 27.9606 and KP = 32.0490. The test was conducted while an object crossed the vehicle’s path at distances of 5, 10, 15, and 20 m, respectively. It was found that controlling brake fluid pressure by measuring the distance from the object helped reduce the braking time and jerking of the vehicle and could stop the vehicle before experiencing a collision. At a distance of 20 m, the vehicle could be stopped before the crash and was 3.7 m away from the object; at a distance of 15 m, the distance from the object was 3.1 m; and at a distance of 10 m, the distance from the object was 3 m. However, at a distance of 5 m, the brake system could not stop the vehicle, causing collision with the object because the distance from the object for braking was less than the designed distance. This shows that the warning system and the brake fluid pressure control system can operate in accordance with the corresponding conditions correctly, smoothly, and quickly within the specified distance and be applied to other types of vehicles.
1. Introduction
Vehicles are currently undergoing rapid development to improve road safety through technology such as lane-keeping systems, emergency braking systems, distance-keeping systems, and various warning systems [1,2,3]. Most of these systems are installed in modern vehicles with many amenities. However, for older vehicles, including other types of vehicles, these systems do not have driver assistance, including a braking system, which is very important for the safety of the driver or passengers. This research focuses on developing an automatic braking system for autonomous vehicles (AVs) [4,5,6] used for student transportation on university campuses by using LiDAR to detect objects in front of these vehicles to warn passengers and apply the brakes in advance to avoid a collision. This system is specifically designed and prototyped for transporting students across university campuses. The system is designed to provide advanced warnings of proximity to stations or obstacles ahead. The fact that AVs use tracks parallel to public roads will help ensure the creation of safety features that reduce collisions and increase road user confidence in safe and efficient operation [7,8,9].
Currently, LiDAR technology [10] is integrated into braking systems to measure distances and detect people or objects that suddenly cut in front through light detection and ranging [11,12]. This integration provides drivers with warnings about the proximity of objects ahead and to the sides, helping prevent accidents. Moreover, LiDAR plays a crucial role in enhancing braking systems, known as “Autonomous Emergency Braking” [13,14], to meet the ASCE and ANSI/ASCE/T&DI 21-21 standards [15].
The braking system is essential for slowing down or halting the movement of a vehicle. In the context of rail passenger vehicles, braking systems are categorized into three main types based on their operation: mechanical, air brake, and hydraulic systems [16,17,18]. This research focuses on hydraulic braking systems due to their widespread adoption and the ease with which they can be maintained. Hydraulic systems are straightforward and can be readily integrated with additional assistance systems like Brake Booster [19,20,21], the Anti-Lock Brake System (ABS), and Electronic Brake Force Distribution (EBD) [22,23].
Based on the information above, our research team integrated LiDAR technology into a braking system designed to slow down and provide warnings to an autonomous vehicle (AV) as it approaches a parking station. This integration is a prototype currently being tested at King Mongkut’s University of Technology North Bangkok. By monitoring distances and adjusting brake fluid pressure, the system automatically alerts operators before approaching stations or obstacles, ensuring safe and efficient operation.
2. Determining the Braking Distance of AV
2.1. Calculating Braking Distance
The safe braking distance is the sum of the reaction distance and the braking distance, as depicted in Figure 1. As shown in the figure, the safe braking distance can be calculated using Equation (1).
where Ss is the safe braking distance (m), S is the braking distance (m), V is the speed of the vehicle (km/h), and T is the reaction time (s).
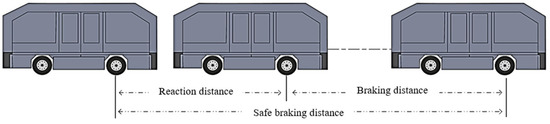
Figure 1.
The safe braking distance of AV.
The braking distance is the distance that a vehicle travels from when the brakes are applied until it comes to a complete stop. It can be calculated using Equation (2).
where a is retardation (m/s2).
Using Equations (1) and (2), we can calculate a car’s braking distance. In this research, we calculate the required braking distance required for the vehicle to come to a complete stop at 20 km/h, i.e., 10 m. The braking action begins within 2 s after the brakes are applied. The safe braking distance and the retardation rate used in this study are as follows. The safe braking distance is 48.67 m, and the retardation rate is 0.317 m/s2.
2.2. Calculating Braking Force
Newton’s second law can be used to calculate braking force. A free-body diagram of the AV is provided in Figure 2.
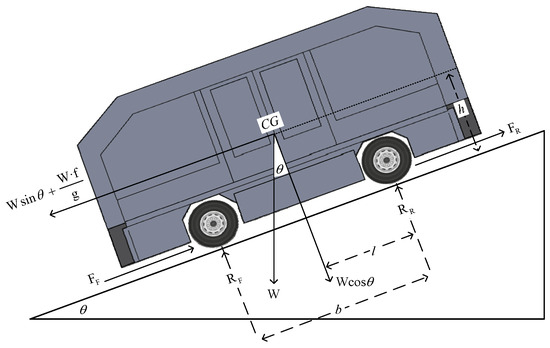
Figure 2.
Free-body diagram of the AV.
The variables in Figure 2 are defined as follows: W is the vehicle’s weight (kg), µ is the coefficient of adhesion between the tires and the road surface, RF and RR are the perpendicular reaction forces between the road and the front and rear wheels (N), b is the wheelbase (m), h is the height of the center of gravity measured from the road surface (m), l is the distance from the rear wheel to the center of gravity (m), f is the deceleration rate (m/s2), θ is the gradient (deg), and g is gravity (m/s2). Table 1 shows the various variable values used in designing the vehicle’s braking force as depicted in Figure 1.

Table 1.
Autonomous vehicle parameters for brake design.
Equations (3)–(5) can be derived from Figure 2 and the data in Table 1, considering the brakes on all four wheels:
where
and
Based on Equations (6)–(8), the maximum possible braking force that can be applied without the wheels locking up can be determined. Assuming a 50:50 weight distribution, the forces exerted on the front and rear wheels are as follows: the front-wheel braking force (FF) and rear-wheel braking force (FR) are both equal to 2384 N.
2.3. Calculating the Force of the Disc Brake
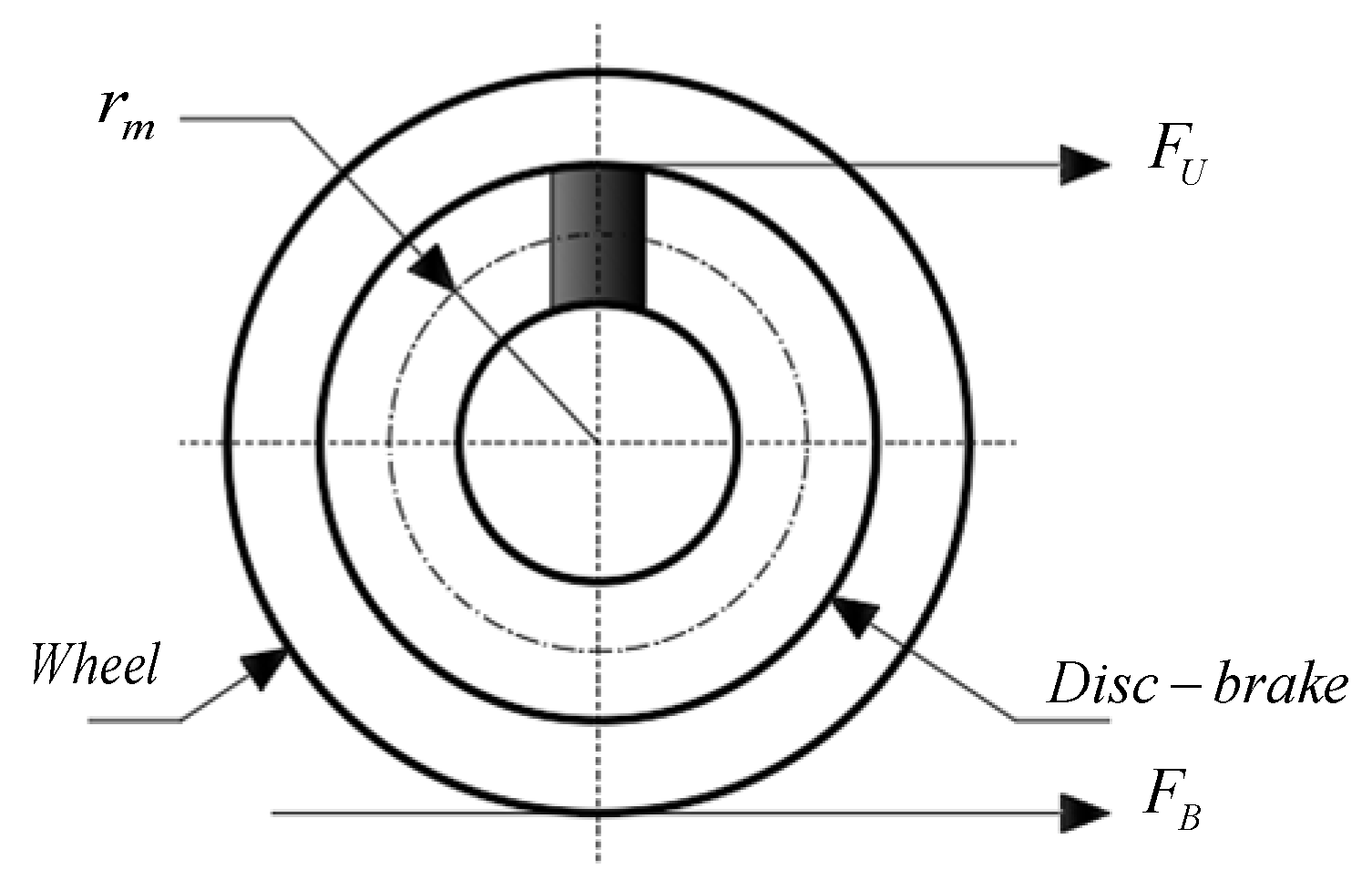
The brake force of the disc brake can be calculated by considering the diagram in Figure 3.
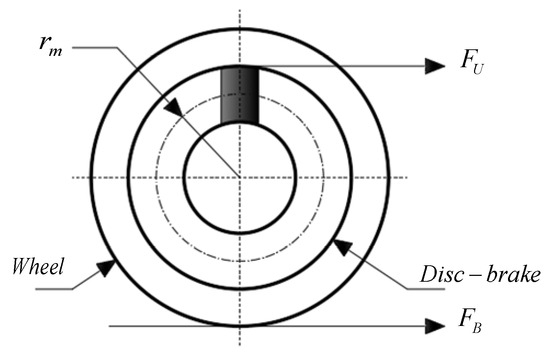
Figure 3.
Free-body diagram of the disc brake.
The variables in Figure 3 are defined as follows: FB is the braking force at the wheel (N), FU is the braking force at the disc (N), rm is the radius of the brake disc (m), and R is the radius of the tire (m). The force applied to the brake disc can be calculated using Equation (6), with the brake disc radius being 0.165 m.
Based on Equation (6), the average braking force at the front and rear wheel disc positions can be computed. The front-wheel disc braking force and rear-wheel disc braking force are both 5960 N.
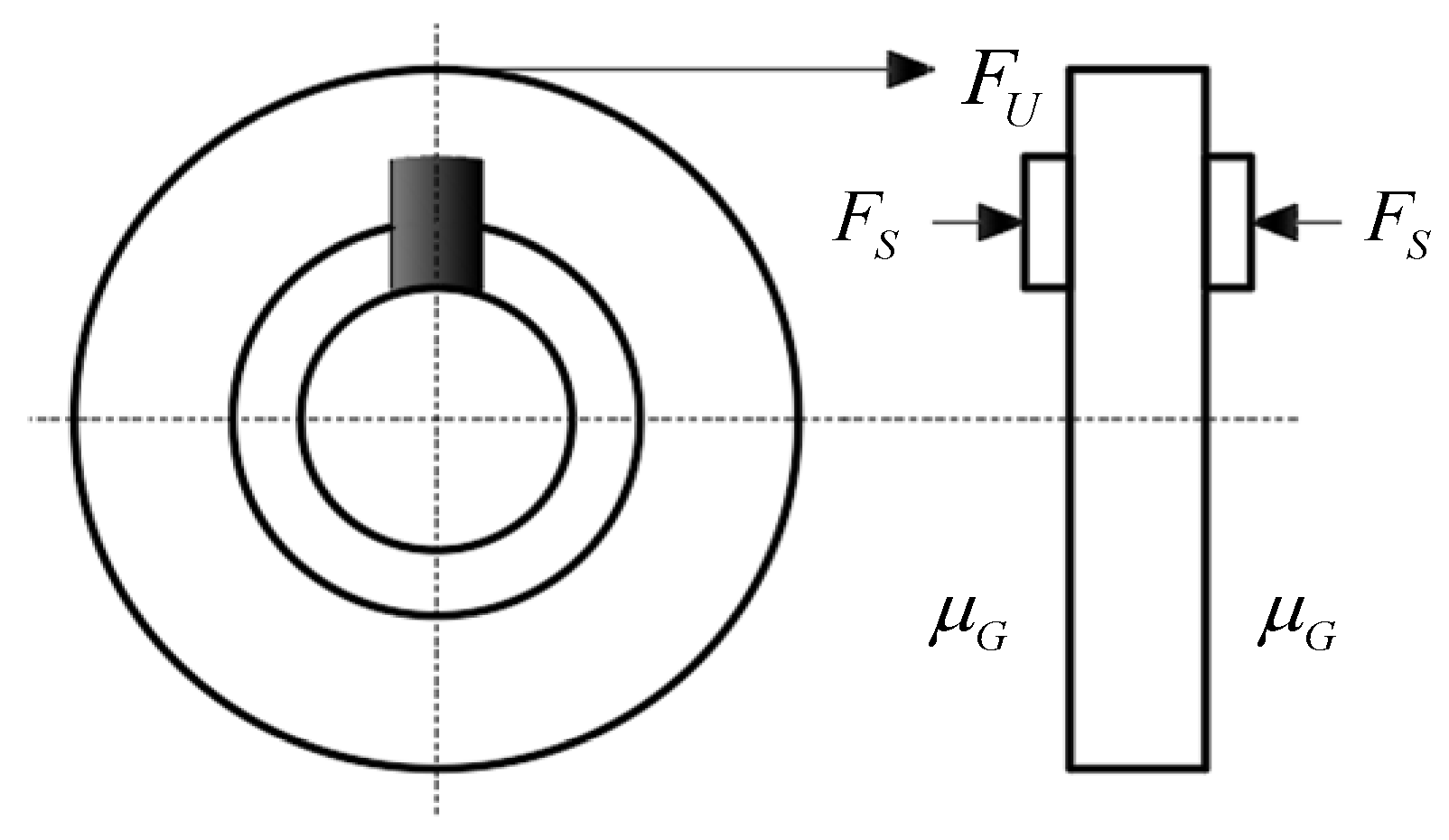
2.4. Calculating the Force Generated by the Brake Caliper
The force generated by the brake caliper can be calculated by considering the diagram in Figure 4.
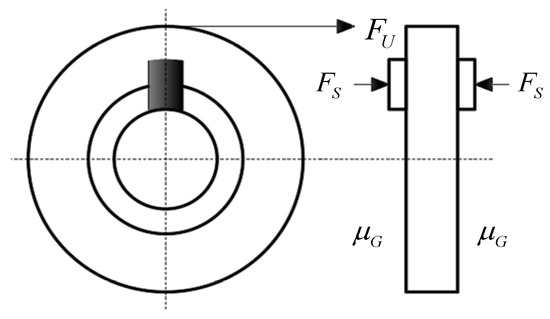
Figure 4.
Free-body diagram of the brake caliper.
Based on Figure 4, the following variables can be determined. µG is the coefficient of friction between the brake pad and brake disc, and FS is the force applied by the brake caliper (N). The force applied by the brake piston can be calculated by setting the coefficient of friction between the brake pad and brake disc to 0.45, as specified in Equation (7).
From Equation (7), the force generated by the front and rear wheel calipers can be calculated. The braking force at the front and rear calipers is 6623 N.
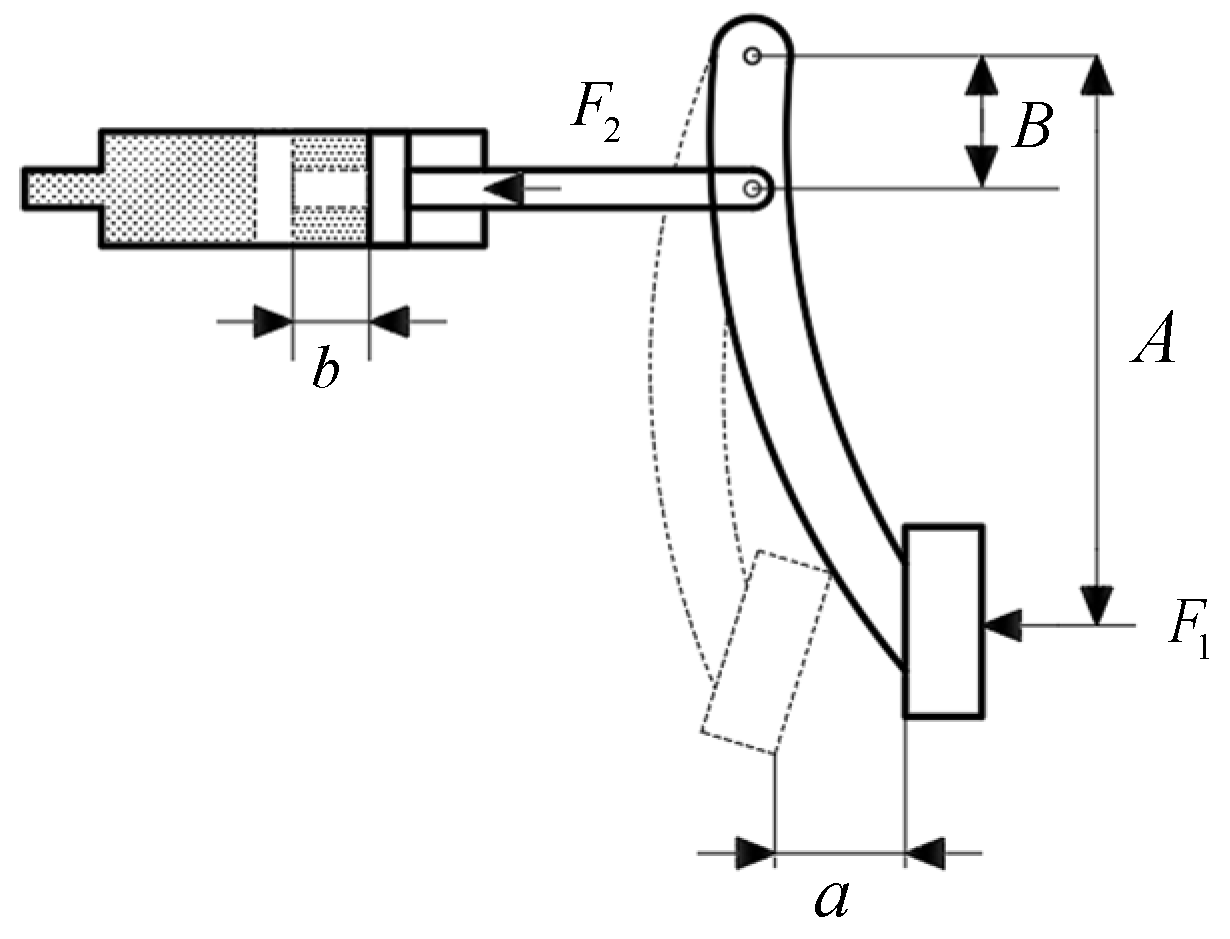
2.5. Calculating the Force Exerted by the Master Cylinder
The force exerted by the master cylinder can be calculated by considering the diagram in Figure 5.
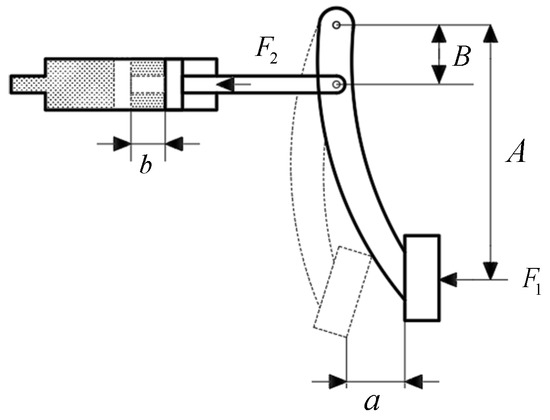
Figure 5.
Free-body diagram of the master cylinder.
Based on Figure 5, the force of the brake master cylinder can be calculated using Equation (8):
where F1 is the force applied to the brake pedal (N), F2 is the force exerted by the brake master cylinder (N), A is the distance from the center of the brake pedal to the pivot point (m), B is the distance from the push rod to the fulcrum (m), a is the distance from the brake pedal to the pivot point (m), and b is the deflection distance of the brake master cylinder (m). Based on Equation (8), the force required to press the brake pedal was determined to be 125 N.
To calculate the braking distance and braking force to ensure the safety of AV vehicle users, we designed a brake fluid pressure control system equipped with a DC motor. This enhancement aims to achieve faster and more precise system operation.
3. Brake Forced Control System
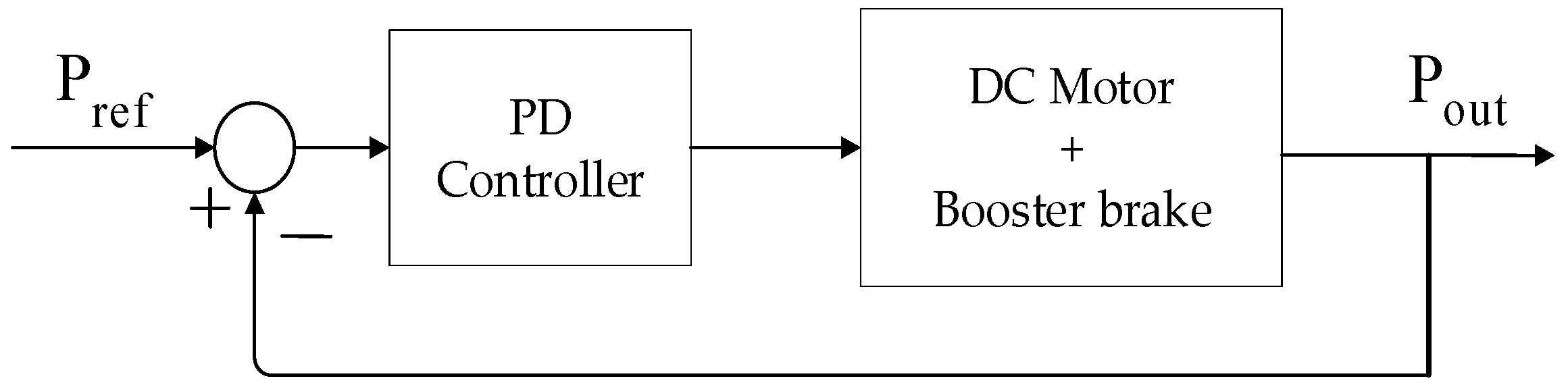
Since braking force is directly proportional to hydraulic oil pressure, we employed a DC motor to operate the brake lever, eliminating the need for manual operation. A closed-loop control system with a PD controller was used for AV control as it can control how a DC motor operates [24,25,26] and ensure precise control. Figure 6 shows a block diagram of the hydraulic oil pressure control system, and Equation (9) corresponds to the PD controller.
where KP is the proportional controller, and KD is the derivative controller.
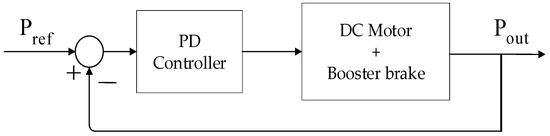
Figure 6.
Block diagram of PD controller.
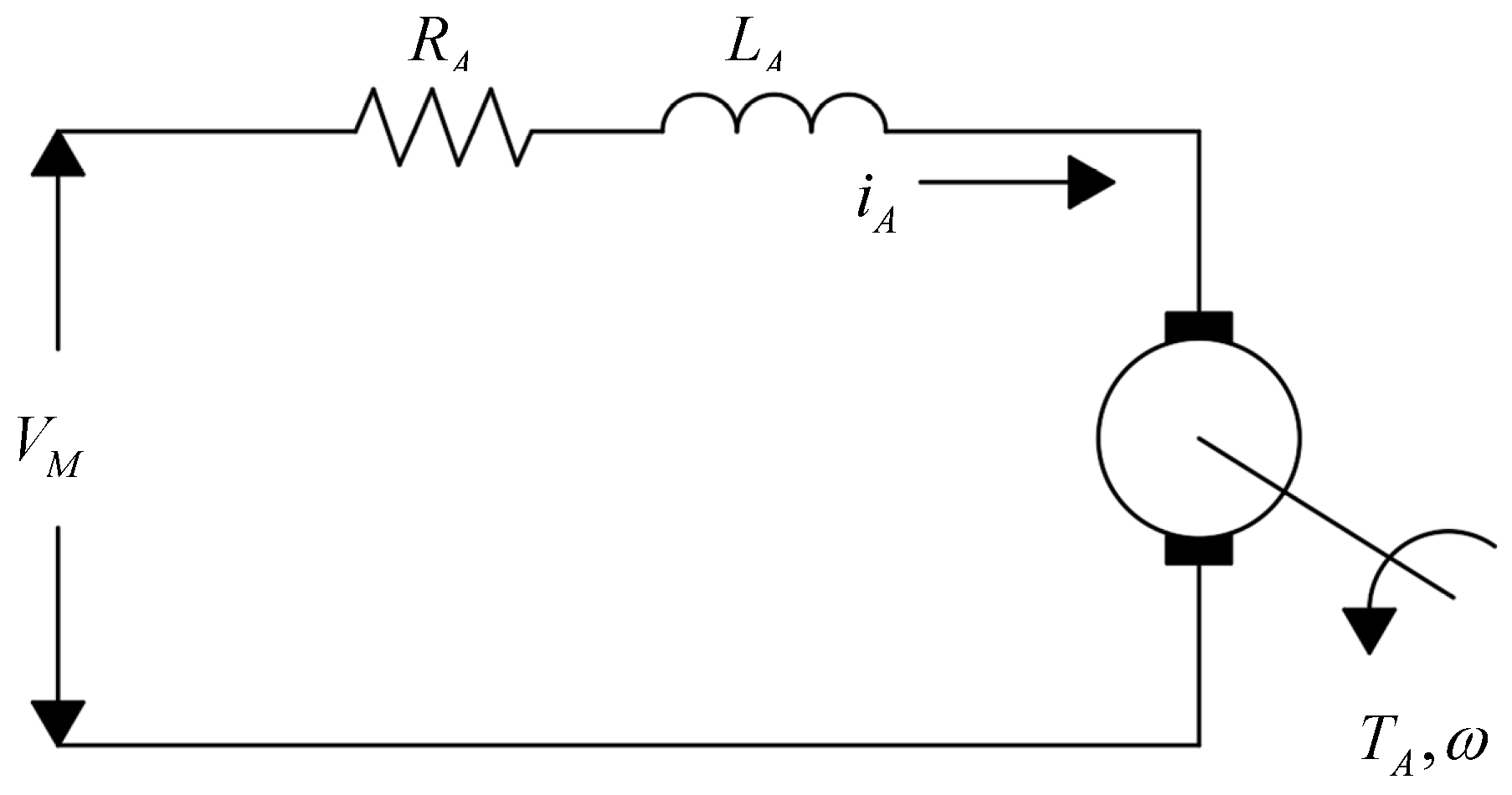
Mathematical Model of DC Motor in Braking System
A DC electric motor functions by converting electrical energy into mechanical force. This is achieved through armature control, where the rotational speed and position are adjusted using voltage adjustments in the armature circuit, often via a ball screw reduction gear mechanism. Control is achieved by varying the voltage applied to the armature circuit. We started by considering the torque equation of the motor, as shown in Equation (10).
The electromotive force is shown in Equation (11):
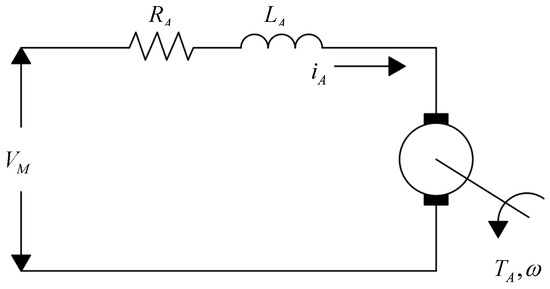
Figure 7.
Electrical armature circuit diagrams.
Based on Equations (10) and (11), the mathematical equations of a DC motor can be written in state-space-model form, as shown in Equation (12).
In practice, some DC motor parameters cannot be measured directly. However, knowing the values of these variables is essential for designing the controller. To achieve this, we specified the identity of the DC motor using MATLAB R2024a-Simulink’s Parameter Estimation section. This estimation process involved using voltage data and the movement position of the motor (DC Motor) obtained from experiments, which served as input data. The output of the MATLAB program was then compared with the output of the mathematical model. The resulting mathematical model was subsequently used to design a PD controller utilizing MATLAB-Simulink’s Signal-Constraints section [27]. Parameters such as overshoot percentage, rise time, and steady-state time were set to ensure the controller performed as desired.
4. Experimental Setup
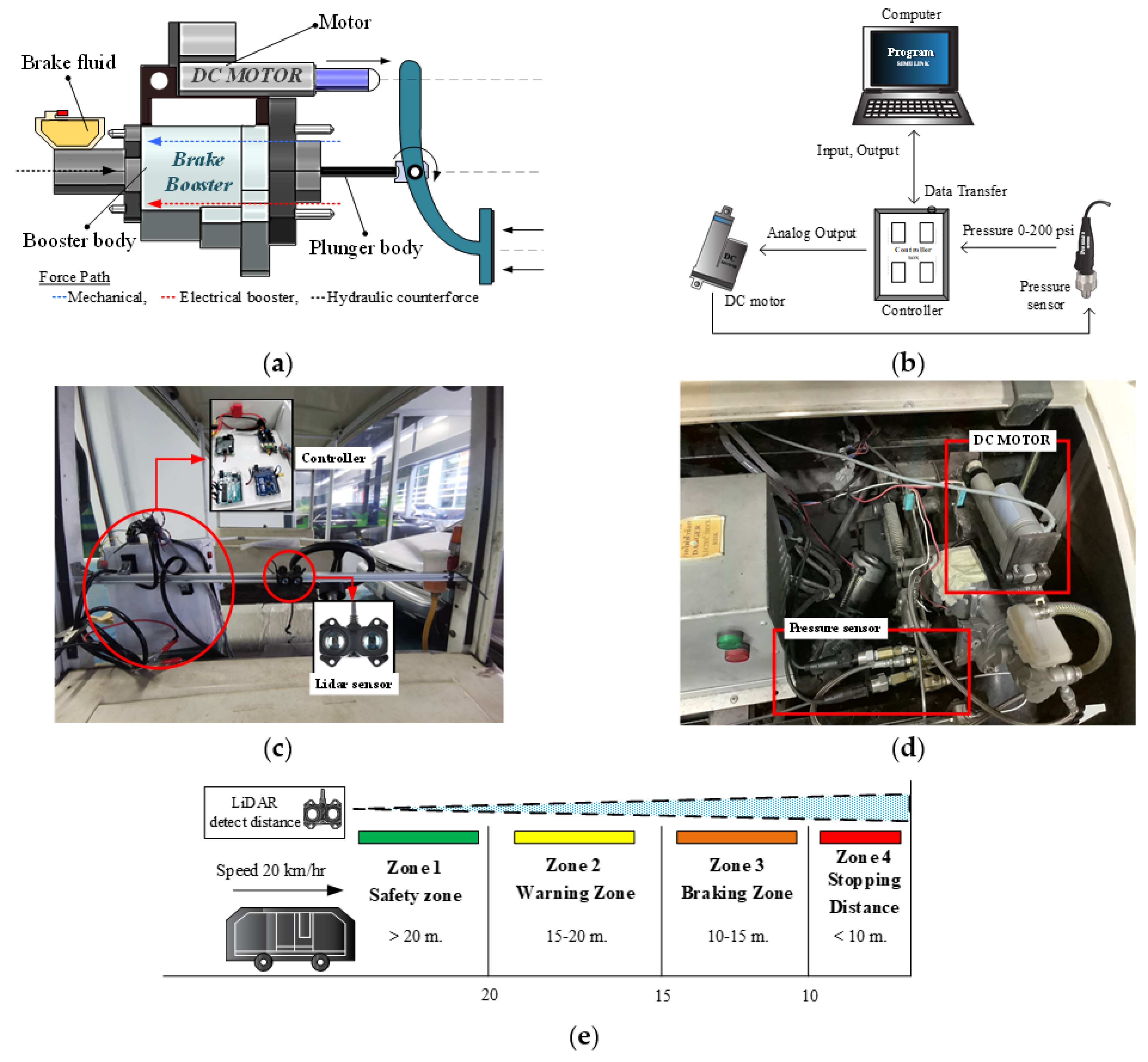
This research involved setting up experimental equipment, as shown in Figure 8 [28]. A DC motor was installed in the brake master cylinder assembly, which includes a brake booster model [29] produced by BOSCH for the HONDA CRV GEN 4. Lx model brand Honda, Order from Massachusetts USA. The DC motor used has a voltage rating of 24 volts and a maximum current of 15 amps and is capable of generating 4500 N of pressure with a movement speed of 60 mm/s. Additionally, a LiDAR sensor Lite V3 HP model brand Garmin, Order from SparkFun Electronics, Niwot, CO, USA was installed to measure distances and detect obstacles within a range of 0–40 m and a field of view of 0.5 degrees.
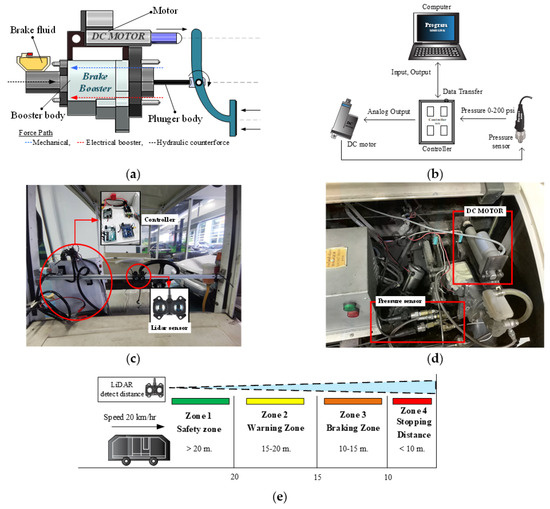
Figure 8.
Brake system: (a) brake booster; (b) pressure controller; (c) location where external devices were installed; (d) area where internal equipment was installed; (e) LiDAR detection data.
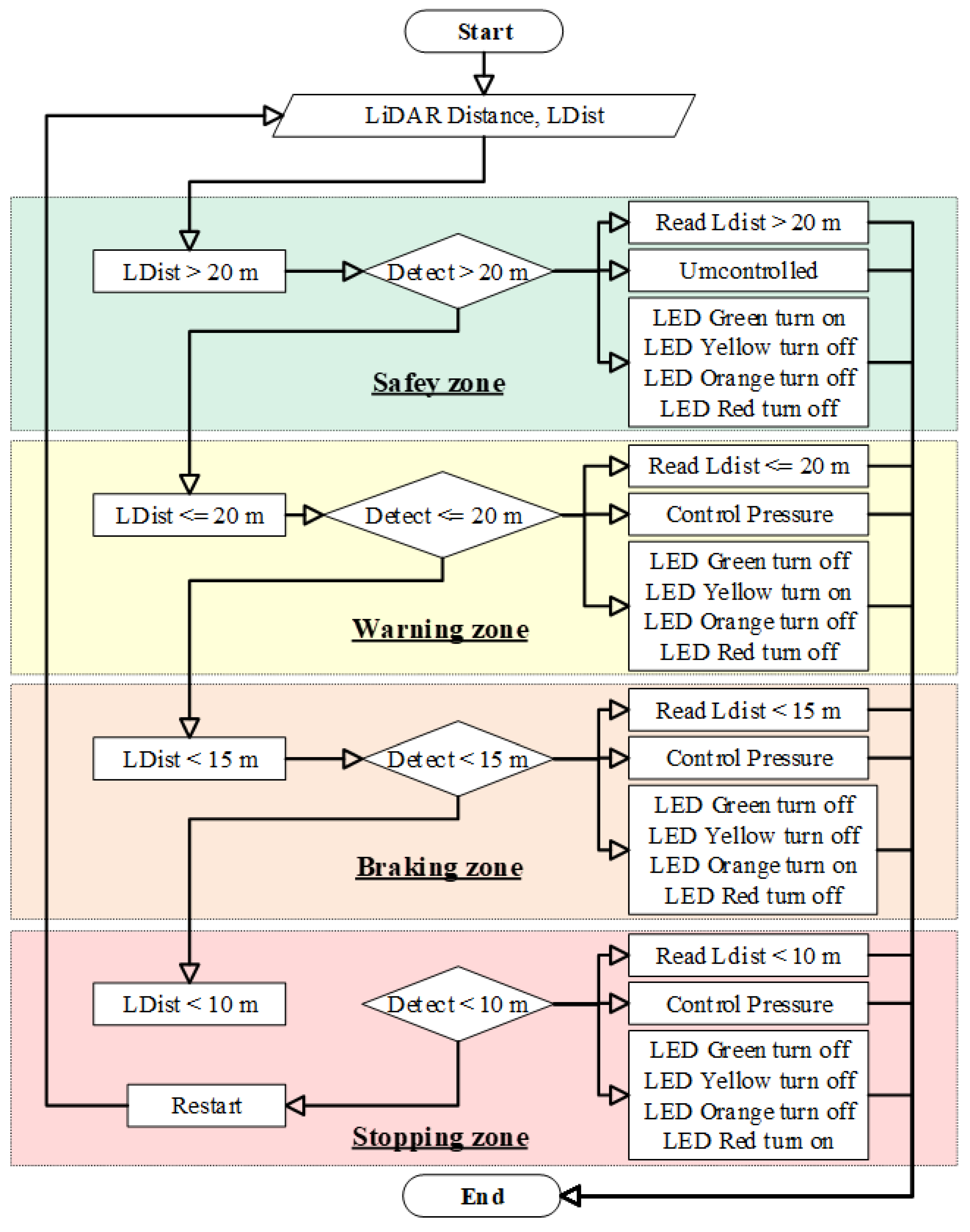
The operation of the system consists of two parts. Section 1: A method of measuring distance with a lidar sensor [30]: The system detects an object that suddenly cuts in front of the AV. When the lidar sensor detects an obstacle in front of the AV, the system will send a warning signal back to the station. Lidar works by measuring distance based on the time taken by a light beam to hit an object and be reflected back. Light beams are faster and thus return faster than sound waves. The working strategy of the system was divided into four zones. A flowchart of the operation of both braking systems, functioning according to the specified conditions, is shown in Figure 9 below.
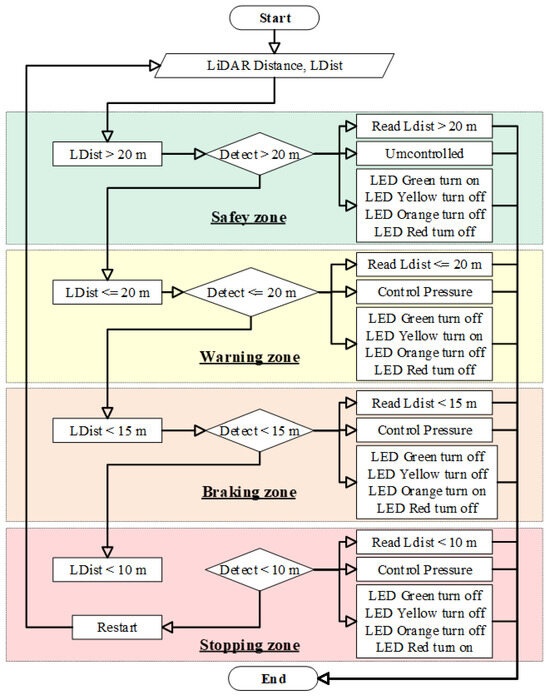
Figure 9.
Flow chart for brake control: Lidar distance (m), brake pressure (PSI), LED signal (signal on—1, off—0).
Zone 1: Safety Zone—The distance between the lidar and the object suddenly cutting in front is more than 20 m.
Zone 2: Warning Zone—A warning is issued when the distance between the prototype vehicle and the object suddenly cutting in front is in the range of 15–20 m.
Zone 3: Braking Zone—This zone triggers a warning and initiates braking when the distance to an object suddenly cutting in front is within 10–15 m to slow down the vehicle.
Zone 4: Stopping Distance—This zone signals the vehicle to stop when the distance is less than 10 m.
Section 2: Brake fluid pressure control. This part controls the linear DC electric motor when the brake pedal is pressed. A brake fluid pressure sensor was installed to provide feedback for the control system. According to the calculations, the brake fluid pressure ranged from 0 to 200 PSI.
5. Experimental Results
Once the equipment for testing the system and collecting various data was complete, this research was divided into four experiments.
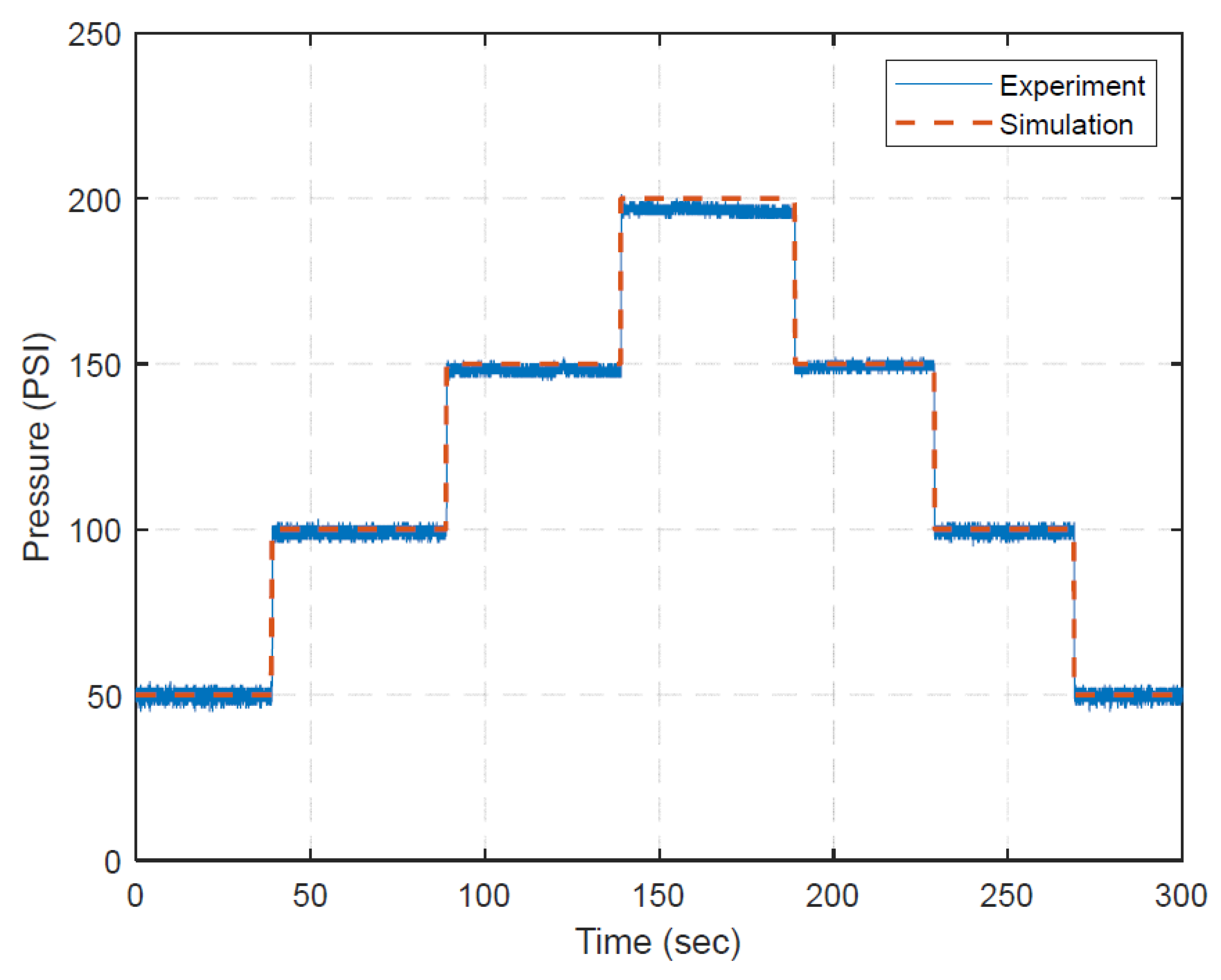
Experiment 5.1: Estimating a Mathematical Model of a DC Motor Braking System.
In this experiment, we collected data on brake fluid pressure from the electric motor operating in the 50–200 PSI range. The data were used to refine the mathematical model of the system. Variable values were estimated using the MATLAB-Simulink Parameter Estimation function, and the results were compared between the mathematical model and experimental data, as shown in Figure 10.
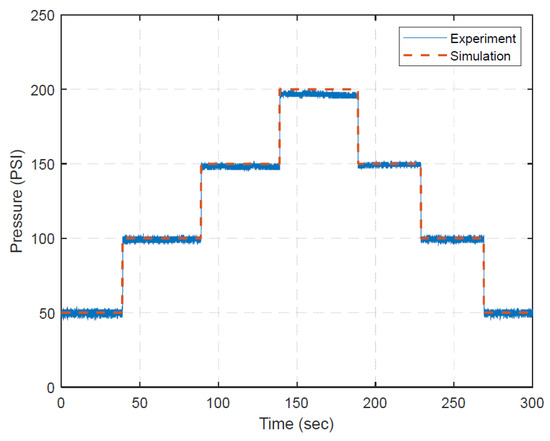
Figure 10.
The results of the DC motor.
As shown in Figure 10, comparison between the mathematical model of the braking system and the experimental results shows a discrepancy of 1.36%. The variable values obtained from the examination of the motor-operated braking system using the Parameter Estimation function in MATLAB-Simulink are presented in Table 2.
Table 2.
Parameters used in mathematical modeling.
Experiment 5.2: Optimization of Brake Fluid Pressure Controller with PD Controller.
This experiment was carried out to establish the boundaries of the control variables necessary for achieving the desired response, including a percentage overshoot not exceeding 10%, a rise time under 2 s, a settling time of less than 4 s, and a steady-state error below 2%. Optimization results were obtained using the MATLAB-Simulink program via the Signal Constraints function to determine the optimal values for the PD controller. The findings are presented in Table 3.
Table 3.
Parameters of PD controller.
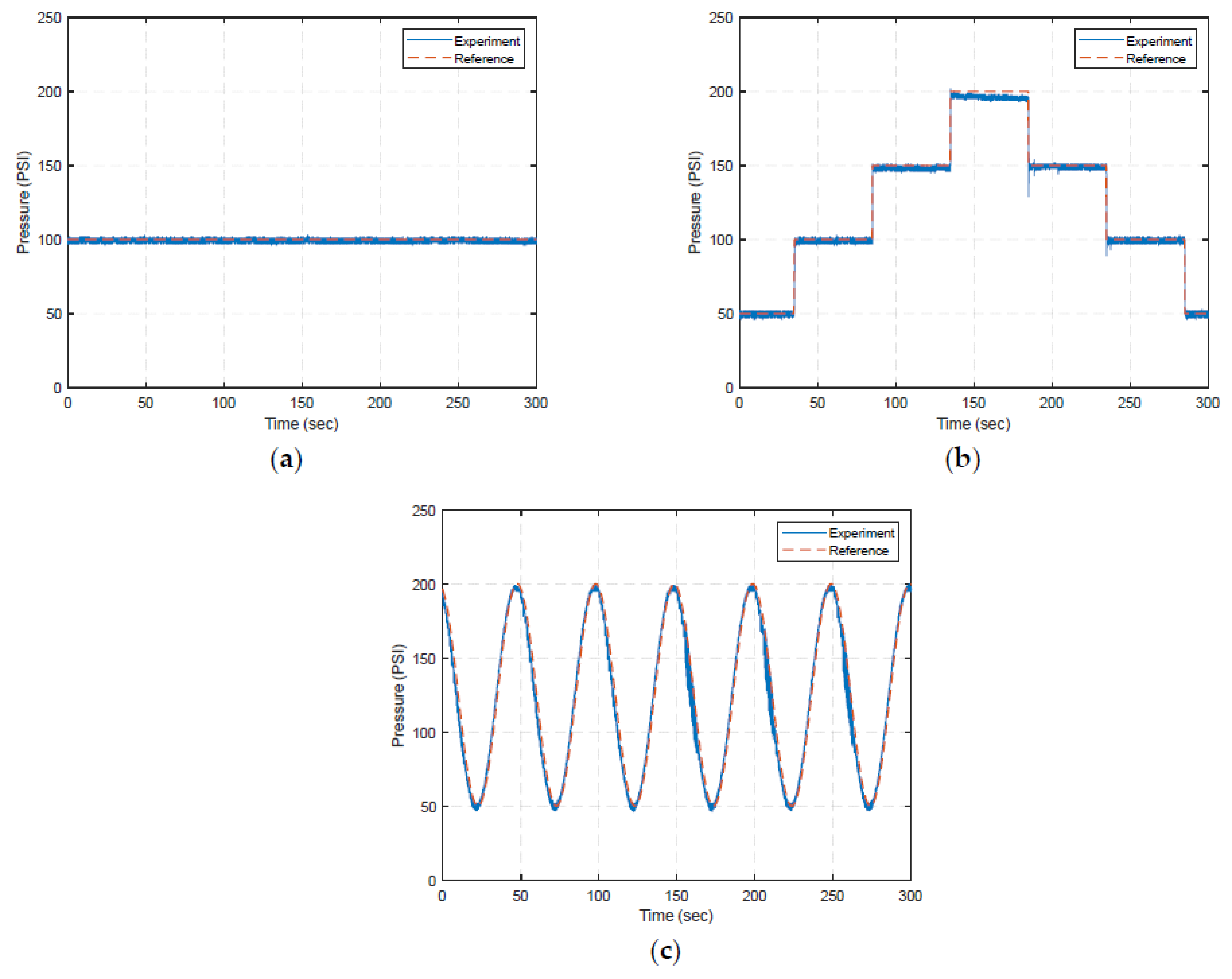
The values of the proportional controller (P) and derivative controller (D) from Table 3 were applied to test the brake fluid pressure control system under various conditions, including constant, step, and harmonic control. The results of the PD controller tests are illustrated in Figure 11a–c.
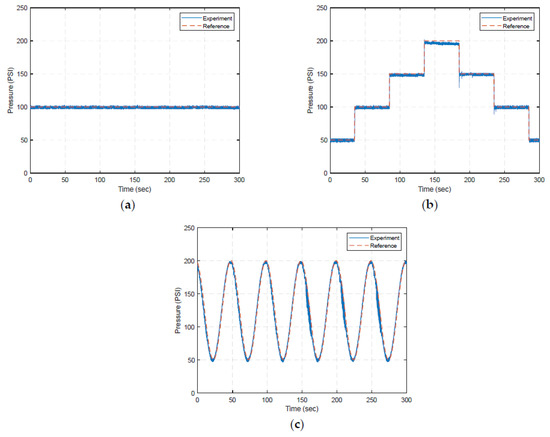
Figure 11.
Experiment 5.2: (a) constant pressure; (b) step pressure; (c) harmonic pressure.
As shown in Figure 11a,b, the brake fluid pressure control system operated according to the specified patterns. The pressure errors were ±1.85 PSI during constant operation, ±2.56 PSI during step operation, and ±7.89 PSI during harmonic operation.
Experiment 5.3: Testing Braking Distance Control with Brake Fluid Pressure. For this experiment, the vehicle’s speed was set to 20 km/h. Brake fluid pressure was controlled at 50, 100, 150, and 200 PSI using a PD controller for each pressure setting. The results are presented in Table 4 below.
Table 4.
AV skid distance at constant brake fluid pressure.
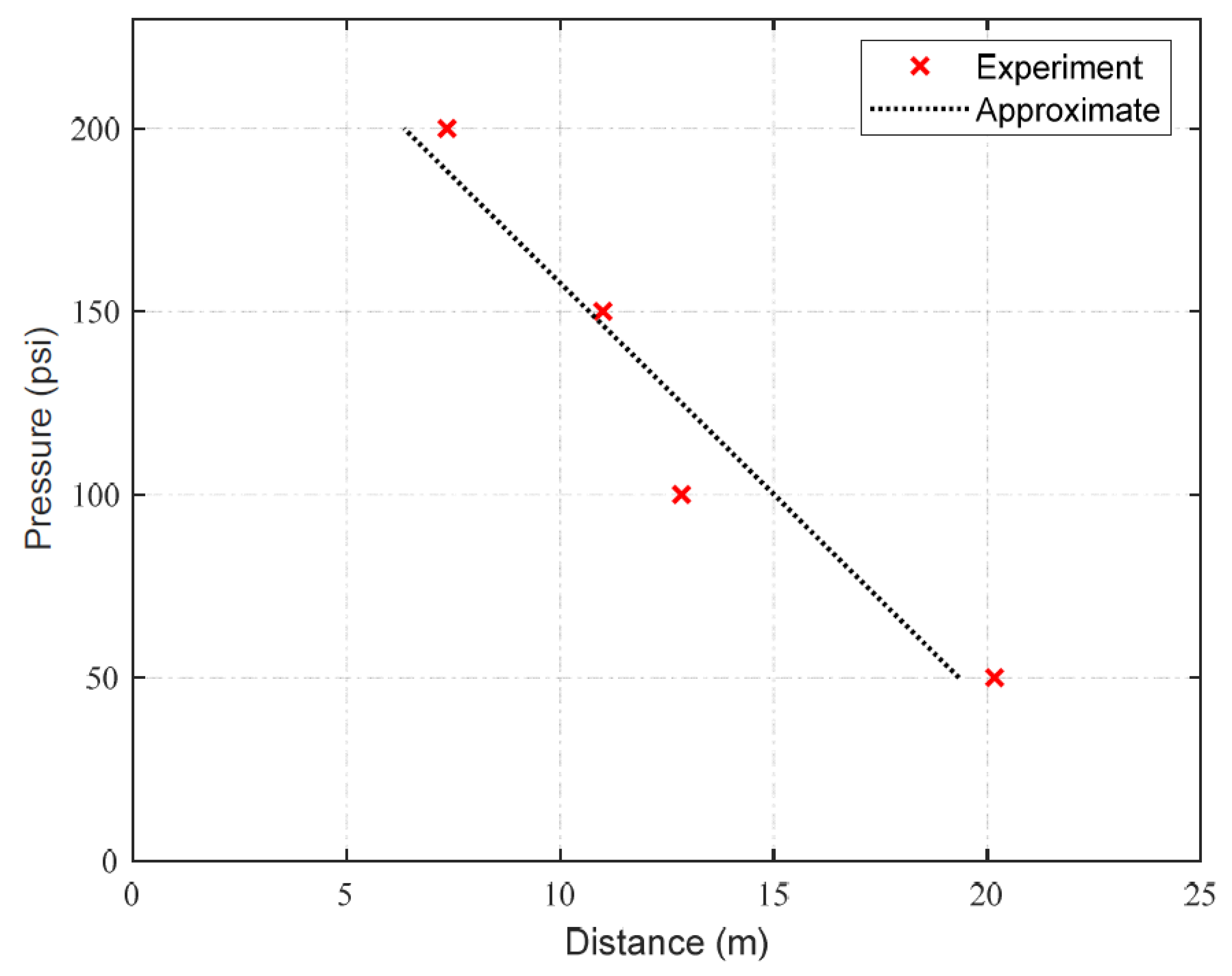
The results of Experiment 5.3 show that the relationship between braking distance and brake fluid pressure was analyzed to control the AV braking system at 20 km/h. The findings are depicted in Figure 12.
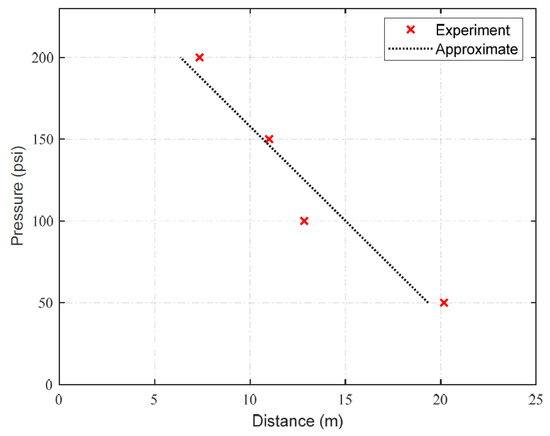
Figure 12.
Brake curve profile.
The data from Figure 12 were used to derive the relationship equation using curve fitting [31] via the MATLAB program. This equation can be utilized in programming the microcontroller to regulate the operation of the DC motor under specific conditions and constraints, as described in Equation (13).
where is the Brake fluid pressure (psi), and is the LiDAR distance (m).
Using Equation (13), the relationship was tested to ensure the braking system operates automatically when an object suddenly cuts in front or obstructs the path or when approaching the station to stop the vehicle, as demonstrated in Experiment 5.5.
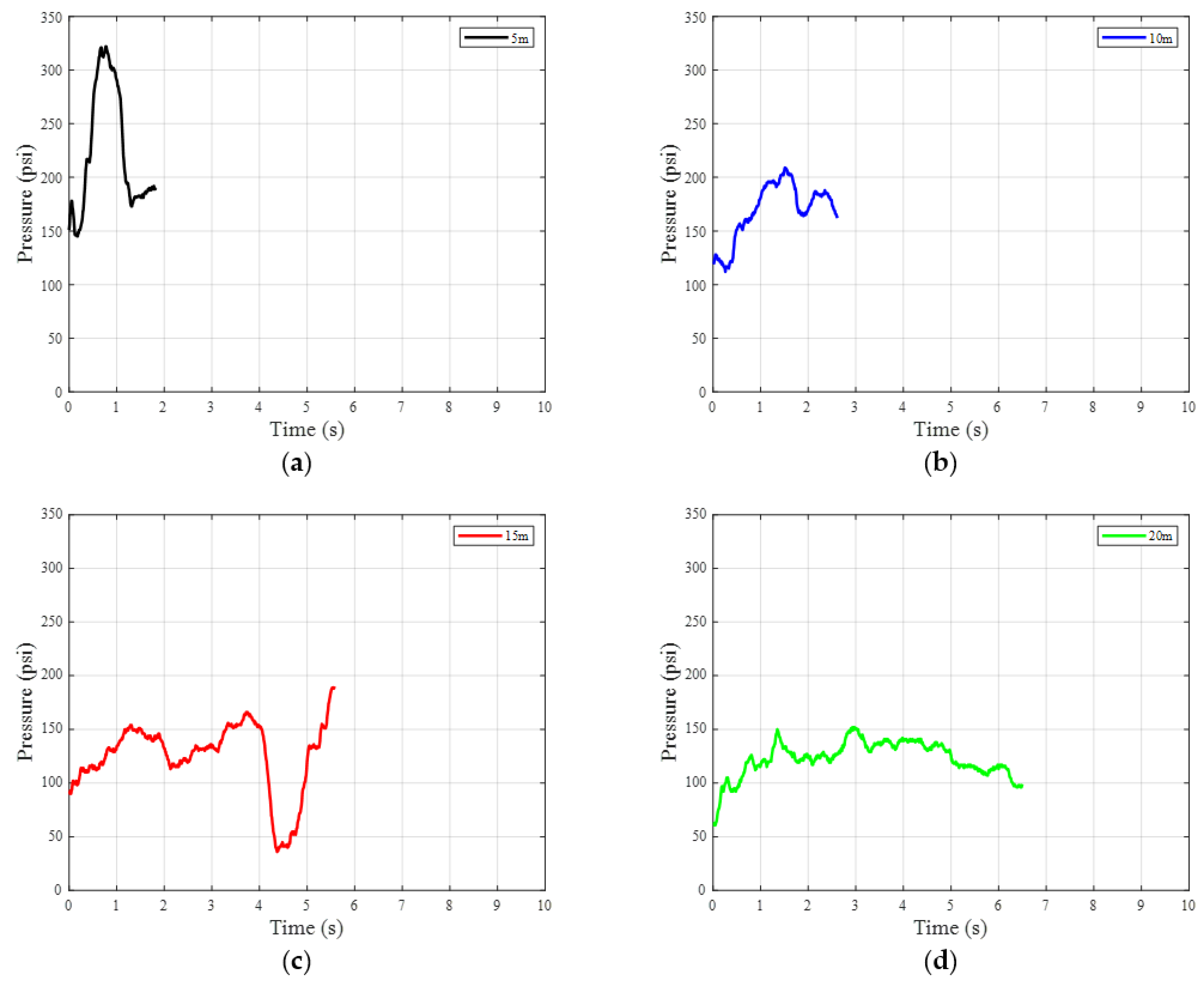
Experiment 5.4: This experiment is a traditional brake system test conducted before installing a brake assist device. This test requires the driver to apply braking force when an object crosses in front of the vehicle at a distance of 5, 10, 15, and 20 m. The test results are shown in Figure 13 and Table 5. It was found that the four types of tests revealed different brake behaviors, which can be observed from the brake fluid pressure in each test. In the test where the object crossed in front of the vehicle at a distance of 5 m, the highest brake fluid pressure was approximately 330 PSI, and the braking time was approximately 1.82 s. The AV vehicle jerked during the test due to the high and quickly applied braking pressure. In the test where the object crossed in front of the vehicle at a distance of 10 m, the highest brake fluid pressure was approximately 200 PSI; the braking time was approximately 2.61 s, and the jerking of the vehicle decreased. In the test where the object crossed in front of the vehicle at a distance of 15 m, the highest brake fluid pressure was approximately 160 PSI; the braking time was approximately 5.62 s, and the vehicle jerked when it was about to stop because the driver misjudged the situation, causing an increase in brake fluid pressure before the vehicle stopped. The test in which the object cut across the front of the car at a distance of 20 m brought about the highest brake fluid pressure, at approximately 130 PSI. The braking time was approximately 6.50 s, and there was no jerking of the vehicle. It can be seen from the brake fluid pressure that the stop was quite soft, and the time afforded to the driver to decide to brake was quite long, allowing for a careful and accurate assessment of the situation.
Figure 13.
The relationship between braking time and object distance when stopping the vehicle under the condition that a person is in control: (a) 5 m.; (b) 10 m.; (c) 15 m.; (d) 20 m.
Table 5.
Time taken to stop the vehicle under the condition that a person is in control.
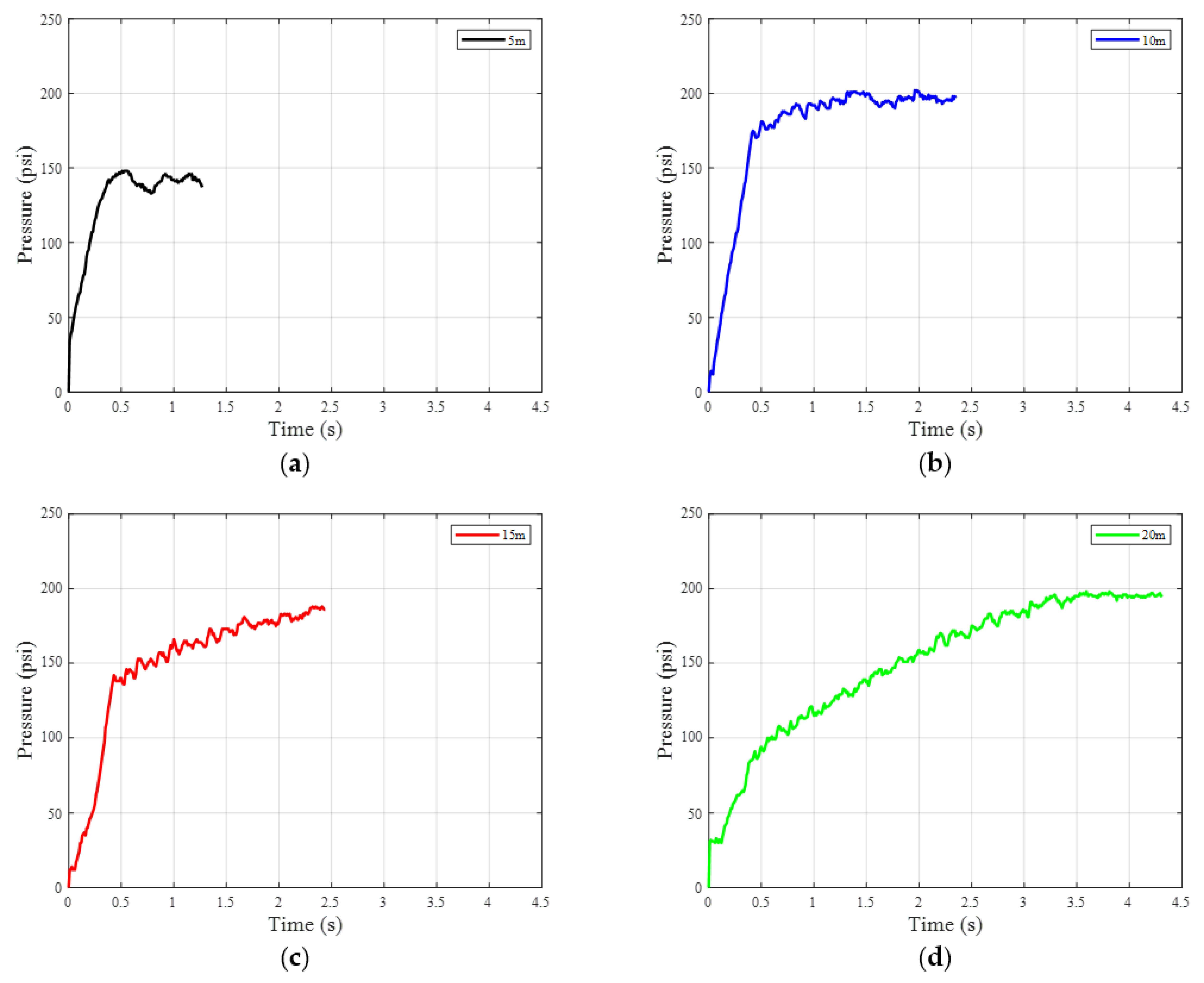
Experiment 5.5: In this experiment, the braking system was tested after installing the brake assist device and involved an object crossing in front of the car at a distance of 5, 10, 15, and 20 m, employing the designed PD controller together with measuring the distance from the object via LiDAR. The test results are shown in Figure 14 and Table 6. It was found that when the brake fluid pressure was controlled such that it changed with the distance from the object, the maximum pressure was the same, amounting to 200 PSI, but the braking time differed depending on the distance from the object. Each test showed a significant reduction in the jerking of the vehicle. It can be observed that the brake fluid pressure increased smoothly without overshooting. However, in the test involving a distance of 5 m, the vehicle could not be stopped because the brake assist device could not raise the pressure as high as the system required, resulting in a collision with the object.
Figure 14.
The relationship between time and brake fluid pressure and the time taken to brake when an object cuts in front (using an automated system): (a) 5 m.; (b) 10 m.; (c) 15 m.; (d) 20 m.
Table 6.
Time taken to stop the vehicle under system control.
Experiments 5.4 and 5.5 show that the brake fluid pressures before and after the control system were different. Human braking will cause severe jerking if an object crosses or if the human is startled. When installing the developed braking device to help make the existing braking system work smoothly and quickly, the results, when compared, show that the brake fluid pressure control system with a PD controller combined with LiDAR distance measurement can work better than the driver, with reduced car jerking and shorter braking time.
6. Conclusions
We began this research by developing a mathematical model of the braking system and estimating the model, which showed an error of 13.6%. The optimal parameters for the PD controller based on the designed conditions were determined to be KP = 27.906 and KD = 32.049. When controlling the brake pressure, the system exhibited a steady-state pressure control error of ±1.85 psi, a step response error of ±2.56 psi, and a harmonic response error of ±7.89 psi. The system was tested by simulating an object passing in front of the vehicle at a speed of 20 km/h at four different distances: 20 m (zone 1), 15 m (zone 2), 10 m (zone 3), and 5 m (zone 4). In zones 1–3, the braking system successfully stopped the vehicle, with a remaining distance of approximately 3 m from the object, preventing a collision. However, in zone 4, where the object was less than 5 m away, the system could not stop the vehicle in time to avoid a collision. This result is consistent with the initial system design, which predicted a minimum braking distance of 6 m. The experiments demonstrate that the braking system operates accurately and reliably within the specified conditions and boundaries, meeting the design expectations for safe operation in zones 1–3. The brakes with the brake fluid pressure control system worked quickly, without jerking the vehicle. The test results show that considering these principles can reduce jerking in other types of vehicles.
Author Contributions
Conceptualization, S.O. and C.S.; methodology, S.O.; software, P.I.; validation, S.O., P.I. and C.S.; formal analysis, S.O. and P.I.; investigation, S.O.; resources, P.I.; data curation, N.T.; writing—original draft preparation, S.O. and P.I.; writing—review and editing, N.T. and C.S.; visualization, N.T.; supervision, S.O. and C.S.; project administration, C.S.; funding acquisition, C.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liang, J.; Tian, Q.; Feng, J.; Pi, D.; Yin, G. A Polytopic Model-Based Robust Predictive Control Scheme for Path Tracking of Autonomous Vehicles. IEEE Trans. Intell. Veh. 2024, 9, 3928–3939. [Google Scholar] [CrossRef]
- Rao, S.; Quezada, A.; Rodriguez, S.; Chinolla, C.; Chung, C.J.; Siegel, J. Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms Using Electric Vehicles. Vehicles 2022, 4, 1012–1041. [Google Scholar] [CrossRef]
- Guo, J.; Wang, Y.; Yin, X.; Liu, P.; Hou, Z.; Zhao, D. Study on the Control Algorithm of Automatic Emergency Braking System (AEBS) for commercial Vehicle Based on Identification of Driving Condition. Machines 2022, 10, 859. [Google Scholar] [CrossRef]
- Barbosa, F.C. Automated People Mover Technology Review—A Mobility Tool for Large Capacity Airports and Connecting Transit System. In Proceedings of the Joint Rail Conference, New York, NY, USA, 20–21 April 2022. [Google Scholar]
- Thongboonpian, T.; Weerawat, W.; Tomii, N. The Simulation of APM Operation: A Case Study of Suvarnabhumi Airport. J. Adv. Inf. Technol. 2024, 15, 458–466. [Google Scholar] [CrossRef]
- Gunay, M.; Korkmaz, M.E.; Ozmen, R. An Investigation on Braking System Used in Railway Vehicles. Eng. Sci. Technol. Int. J. 2020, 23, 421–431. [Google Scholar] [CrossRef]
- Chengula, T.J.; Mwakalonge, J.; Comert, G.; Sikhi, S. Improving Road Safety with Ensemble Learning Detecting Driver Anomalies Using Vehicle Inbuilt Cameras. Mach. Learn. Appl. 2023, 14, 100510. [Google Scholar] [CrossRef]
- Eskandari Torbaghan, M.; Sasidharan, M.; Reardon, L.; Muchanga-Hvelplund, L.C.W. Understanding the potential of emerging digital technologies for improving road safety. Accid. Anal. Prev. 2022, 166, 106543. [Google Scholar] [CrossRef]
- Han, S.; Kim, H.W.; Leigh, J. Improvement of road safety management systems of local governments in Korea after evaluating related indicators. Accid. Anal. Prev. 2023, 193, 107325. [Google Scholar] [CrossRef]
- Roriz, R.; Cabral, J.; Gomes, T. Automotive LiDAR Technology: A Survey. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6282–6297. [Google Scholar] [CrossRef]
- Yeong, D.J.; Velasco-Hernandez, G.; Barry, J.; Walsh, J. Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review. Sensors 2021, 21, 2140. [Google Scholar] [CrossRef]
- Dai, Z.; Wolf, A.; Ley, P.-P.; Glück, T.; Sundermeier, M.C.; Lachmayer, R. Requirements for Automotive LiDAR Systems. Sensors 2022, 22, 7532. [Google Scholar] [CrossRef] [PubMed]
- Sorrentino, G.; Danese, L.; Circosta, S.; Khan, I.; Luciani, S.; Bonfitto, A.; Amati, N.; Torino, P.D. Remote Emergency Braking System for Autonomous Racing Electric Vehicles. In Proceedings of the International Conference on Advanced Vehicle Technologies (AVT), New York, NY, USA, 19 August 2021. [Google Scholar]
- Lucan, M.; Duchon, F.; Bata, M.; Mikle, D.; Andocs, K. Design of Emergency Brake System for Autonomous Electric Racing Vehicle. In Proceedings of the International Conference on Mechatronics—Mechatronika (ME), Pilsen, Czech Republic, 9 December 2022. [Google Scholar]
- American Society of Civil Engineers. In Automated People Mover Standards; American Society of Civil Engineers: Reston, VA, USA, 2021; pp. 33–34.
- Hua, X.; Zeng, J.; Li, H.; Huang, J.; Luo, M.; Feng, X.; Xiong, H.; Wu, W. A Review of Automobile Brake-by-Wire Control Technology. Processes 2023, 11, 994. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, X.; Yang, C.; Chen, Z.; Wu, X. An Experimental Study on Hysteresis Characteristics of a Pneumatic Braking System for a Multi-Axle Heavy Vehicle in Emergency Braking Situations. Appl. Sci. 2017, 7, 799. [Google Scholar] [CrossRef]
- He, Z.R.; Jing, Z. Study on braking stability of commercial vehicles: An optimized air brake system. Adv. Mech. Eng. 2019, 11, 11687814019848593. [Google Scholar] [CrossRef]
- Meng, B.; Zhou, Z.; Zhang, C.; Yang, F. A Design Method for Booster Motor of Brake-by-Wire System Based on Intelligent Electric Vehicle. Green Energy Intell. Transp. 2023, 2, 100110. [Google Scholar] [CrossRef]
- Nugraha, A.A.; Sumarsono, D.A.; Adhitya, M.; Prasetya, S. Develop of Brake Booster Design for Electric City Cars. Int. J. Technol. 2021, 12, 802–812. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, H.; He, R.; Chen, P.; Chen, H. A Mechatronic Brake Booster for Electric Vehicles: Design, Control, and Experiment. IEEE Trans. Veh. Technol. 2020, 69, 7040–7053. [Google Scholar] [CrossRef]
- Aly, A.A.; Zeidan, E.B.; Hamed, A.M.; Salem, F.A. An Antilock-Braking Systems (ABS) Control: A Technical Review. Intell. Control Autom. 2011, 2, 186–195. [Google Scholar] [CrossRef]
- Gaurkar, P.V.; Ramakrushnan, K.; Challa, A.; Subramanian, S.C.; Vivekanandan, G.; Sivaram, S. An Anti-Lock Braking System Algorithm Using Real-Time Wheel Reference Slip Estimation and Control. In Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, London, UK, 8 June 2021. [Google Scholar]
- Zhang, X. Design and implementation of fuzzy PID DC motor control system based on STM32. In Proceedings of the IEEE International Conference on Control, Electronics and Computer Technology (ICCECT), Jilin, China, 30 April 2023. [Google Scholar]
- Koca, Y.B.; Aslan, Y.; Gokce, B. Speed Control Based PID Configuration of a DC Motor for An Unmanned Agricultural Vehicle. In Proceedings of the International Conference on Electrical and Electronics Engineering (ICEEE), Antalya, Turkey, 11 April 2021. [Google Scholar]
- Saengsri, S.; Prawanta, S.; Odngam, S.; Srisertpol, J. PI-servo with state-D feedback and observer for magnetic stirrer machine. In Proceedings of the International Conference on Circuits, Devices and Systems (ICCDS), Chengdu, China, 8 September 2017. [Google Scholar]
- Shravan, K. DC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification Methods. IOSR J. Electr. Electron. Eng. 2015, 10, 37–47. [Google Scholar]
- Li, C.; Zhuo, G.; Tang, C.; Xiong, L.; Tian, W.; Qiao, L.; Cheng, Y.; Duan, Y. A Review of Electro-Mechanical Brake (EMB) System: Structure, Control and Application. Sustainability 2023, 15, 4514. [Google Scholar] [CrossRef]
- Wu, J.; Chen, P.; Zhao, J.; He, R. Active Braking of an Electronic Brake Booster Facing Intelligent Automobile. Int. J. Perform. Eng. 2018, 14, 1735–1744. [Google Scholar] [CrossRef]
- Pirhonen, J.; Ojala, R.; Kivekäs, K.; Vepsäläinen, J.; Tammi, K. Brake Light Detection Algorithm for Predictive Braking. Appl. Sci. 2022, 12, 2804. [Google Scholar] [CrossRef]
- Cantera-Cantera, L.A.; Vargas-Jarillo, C.; Palomino-Reséndiz, S.I.; Lozano-Hernández, Y.; Montelongo-Vázquez, C.M. A Polynomial Fitting Problem: The Orthogonal Distances Method. Mathematics 2022, 10, 4596. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).