

Research on the Driving Behavior and Decision-Making of Autonomous Vehicles (AVs) in Mixed Traffic Flow by Integrating Bilayer-GRU-Att and GWO-XGBoost Models

Abstract
:1. Introduction
2. Model Framework
- The Bilayer-GRU-Att model aims to capture and predict the dynamic behavior of vehicles in complex traffic environments and simulate the nonlinear dynamic characteristics of vehicles during driving. The model consists of four parts: the input layer, the Bilayer-GRU network (encoder–decoder), the attention mechanism layer (located between the first GRU and the second GRU) [14], and the fully connected layer for trajectory output. Firstly, the input layer performs filtering and standardization on the vehicle trajectory data, and reconstructs feature vectors including vehicle coordinates, longitudinal speed, lateral speed, longitudinal acceleration, lateral acceleration, and heading angle. Then, the Bilayer-GRU captures the contextual information in the time sequence through a double-layer Gated Recurrent Unit (GRU) network and completes the encoding and decoding process. Here, the attention mechanism simulates the ability of human drivers to quickly focus on key target information, prevents the loss of high-value information to make up for the shortcomings of traditional encoders in micro-lane-changing features, and thus improves the accuracy of trajectory prediction. Finally, through the fully connected layer, the model generates trajectory prediction results for future time steps.
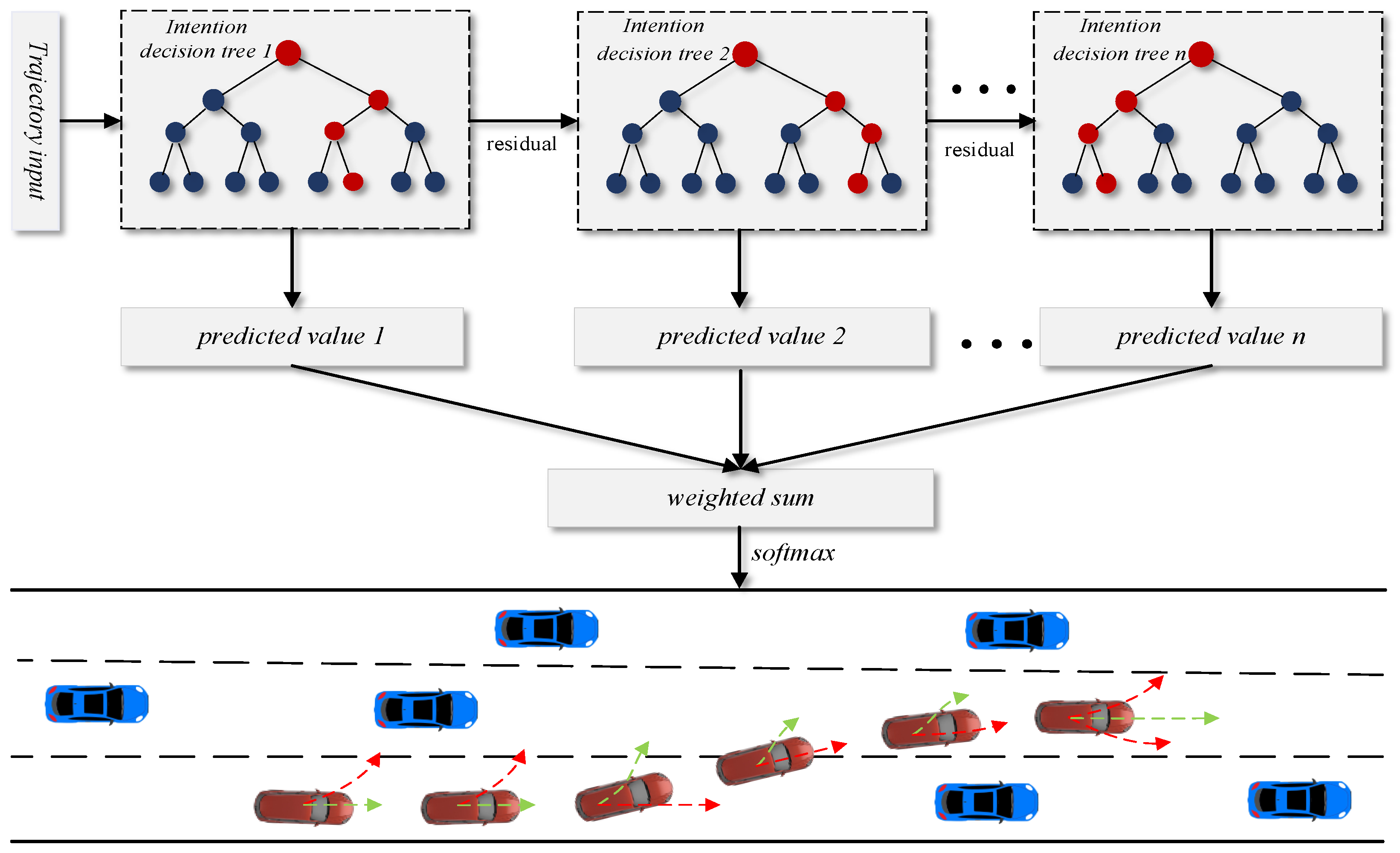
- First, the GWO-XGBoost model further processes the trajectory prediction results generated by the Bilayer-GRU-Att model to extract the key features. Then, the feature splicing module fuses vehicle trajectory data in different prediction time-domains to generate input feature sets. Furthermore, the eXtreme Gradient Boosting model (XGBoost) [15] is optimized by the Grey Wolf Optimization model (GWO) [16], which is used to decode and judge these feature sets, so as to achieve the accurate identification of vehicle lane-changing intention. GWO optimization is used to improve the effectiveness of feature selection and the optimization of XGBoost parameters, thus enhancing the accuracy and robustness of recognition.
3. Data Preprocessing and Fragment Extraction
3.1. Data Source and Preprocessing
3.2. Data Filtering
- The types of vehicles collected in the HighD data include cars and trucks. Because trucks are always on the right lane of the road during driving and the frequency of lane-changing is far less than that of cars, in order to truly reflect the lane-changing decision-making behavior of vehicles on the highway, the driving information of cars in the dataset is selected.
- A total of 4191 sets of vehicle trajectory data are screened from the HighD dataset, including 2123 sets of lane-changing trajectories and 2068 sets of non-lane-changing trajectories. The selected data are collated and the vehicle driving information is recorded as discrete points, where the ordinate direction is the same as the driving direction of the vehicle. Table 1 shows some processed vehicle trajectory data from the HighD dataset, for the fourth vehicle driving in the positive direction of the y-axis, which changed lanes from the middle to the right, starting at 9:20 a.m. on Monday, October 2017.
3.3. Data Fragment Extraction
4. Vehicle Trajectory Prediction Model
4.1. Model Structure
4.2. Bilayer-GRU-Att Model Mechanism
4.2.1. Coding Process
4.2.2. Att Model Mechanism
4.2.3. Decoding Process
4.2.4. Trajectory Output
5. Lane-Changing Intention Identification Model
5.1. Model Structure
5.2. Mechanism of GWO-XGBoost Model
6. Experiment and Analysis
6.1. Experimental Environment Configuration
6.2. Comparative Analysis of Models
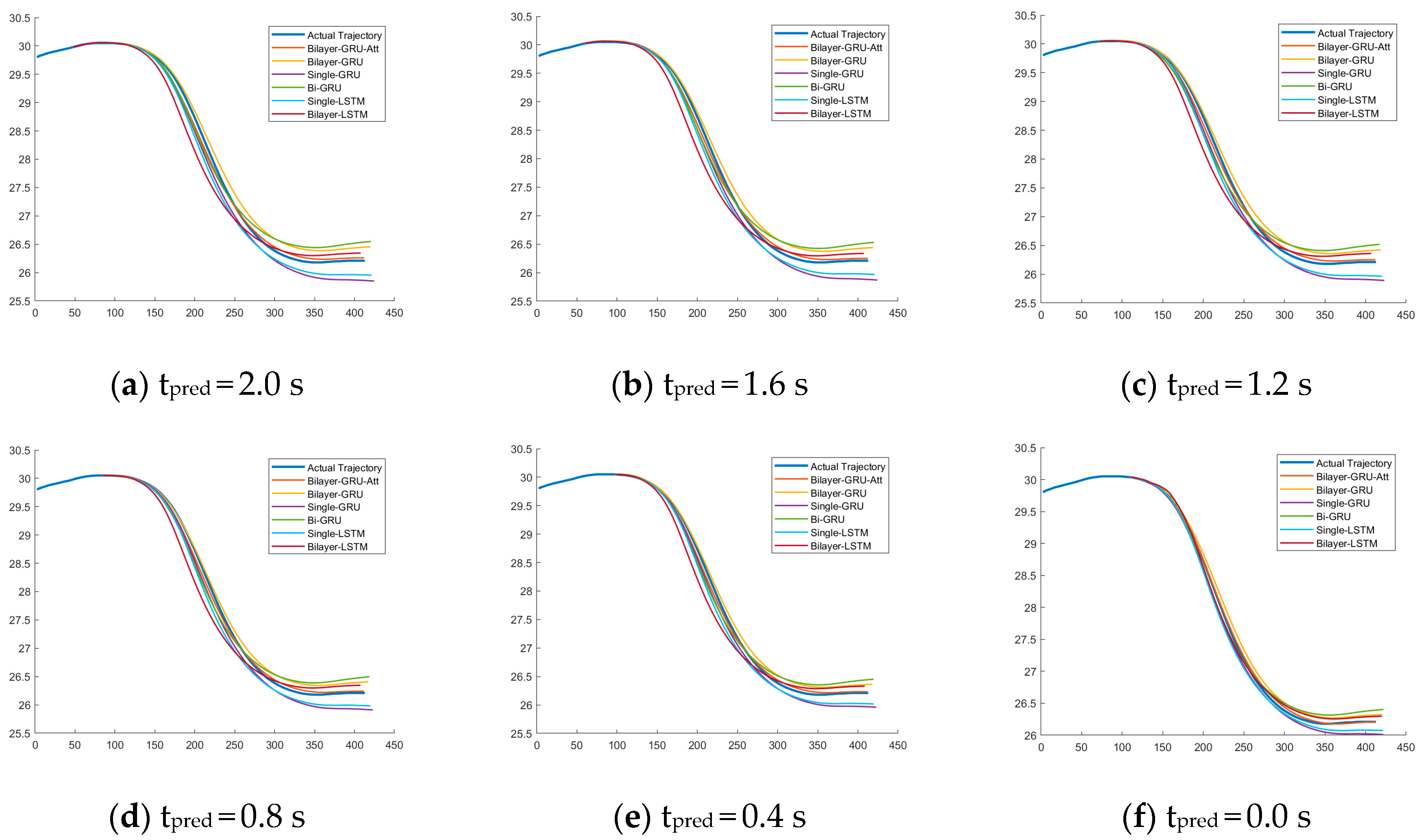
6.2.1. Comparison of Trajectory Prediction Models
6.2.2. Comparison of Lane-Changing Decision Models
- Prediction of “turning left” driving intention: GWO-XGBoost also performed well in identifying “turning left” driving intentions. The precision rate, recall rate, F1 score improved by 31.69%, 4.48%, and 18.55%, respectively, compared with ELM. Compared with the BP model, these indexes are also significantly improved by 18.44%, 3.40%, and 11.17%, respectively.
- Prediction of “going straight” driving intention: GWO-XGBoost has excellent performance in “going straight” driving intention prediction. Compared with ELM, its precision rate is improved by 0.91%, recall rate is improved by 3.08%, and F1 score is improved by 1.99%. Compared with BP, the precision rate, recall rate, and F1 score also increased by 0.30%, 1.79%, and 1.05%, respectively.
- Prediction of “turning right” driving intention: The GWO-XGBoost also demonstrated excellent performance in “turing right” driving intent prediction. The precision rate, recall rate, and F1 score improved by 11.66%, 9.38%, and 10.52%, respectively, compared with ELM. Compared with BP, the improvement of these indicators also reached 6.53%, 3.46%, and 5.00%, respectively.
7. Summary
- The Bilayer-GRU-Att module proposed here exhibits a remarkable ability to capture and analyze the dynamic evolution of the traffic environment in real-time. This capability enables the system to accurately predict the driving state of the target vehicle across different tpred. The module demonstrates superior performance in trajectory prediction, achieving the best prediction error evaluation when compared to benchmarking models.
- The GWO-XGboost module significantly enhances the predictability and accuracy of lane-changing intention recognition. By incorporating information from the Bilayer-GRU-Att module, the GWO-XGboost model effectively decodes and judges feature sets, resulting in the accurate identification of vehicle lane-changing intentions. This integrated approach not only improves the effectiveness of feature selection but also optimizes XGBoost parameters, thereby enhancing the overall accuracy and robustness of the recognition system.
- The experimental results obtained using the real-world HighD dataset further validate the effectiveness of the proposed hybrid prediction model. The models’ performance in mixed human–machine traffic scenarios is particularly noteworthy, highlighting its potential for enhancing system safety in complex driving environments.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Andreotti, E.; Boyraz, P.; Selpi, S. Mathematical definitions of scene and scenario for analysis of automated driving systems in mixed-traffic simulations. IEEE Trans. Intell. Veh. 2020, 6, 366–375. [Google Scholar] [CrossRef]
- Singh, H.; Kathuria, A. Analyzing driver behavior under naturalistic driving conditions: A review. Accid. Anal. Prev. 2021, 150, 105908. [Google Scholar] [CrossRef] [PubMed]
- Jing, L.; Shan, W.; Zhang, Y. Risk preference, risk perception as predictors of risky driving behaviors: The moderating effects of gender, age, and driving experience. J. Transp. Saf. Secur. 2023, 15, 467–492. [Google Scholar] [CrossRef]
- Yi, B.; Bender, P.; Bonarens, F.; Stiller, C. Model predictive trajectory planning for automated driving. IEEE Trans. Intell. Veh. 2018, 4, 24–38. [Google Scholar] [CrossRef]
- Peng, Y.H.; Jiang, M.; Ma, Z.Y.; Zhong, C. Research progress of key technologies of automobile automatic driving. J. Fuzhou Univ. 2021, 49, 691–693. [Google Scholar]
- Ding, H.; Xingxing, S.; Lai, L. Study on lane change trajectory prediction considering driving intention. Agric. Equip. Veh. Eng. 2023, 61, 1–6. [Google Scholar]
- Moridpour, S.; Sarvi, M.; Rose, G.; Mazloumi, E. Lane-changing decision model for heavy vehicle drivers. J. Intell. Transp. Syst. 2012, 16, 24–35. [Google Scholar] [CrossRef]
- Messaoud, K.; Yahiaoui, I.; Verroust-Blondet, A.; Nashashibi, F. Attention based vehicle trajectory prediction. IEEE Trans. Intell. Veh. 2020, 6, 175–185. [Google Scholar] [CrossRef]
- Do, J.; Han, K.; Choi, S.B. Lane change–intention inference and trajectory prediction of surrounding vehicles on highways. IEEE Trans. Intell. Veh. 2023, 8, 3813–3825. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.; Zhao, W.; Xu, C. Decision-Making and Planning Method for Autonomous Vehicles Based on Motivation and Risk Assessment. IEEE Trans. Veh. Technol. 2021, 70, 107–120. [Google Scholar] [CrossRef]
- Jeong, Y. Predictive lane change decision making using bIDirectional long shot-term memory for autonomous driving on highways. IEEE Access 2021, 9, 144985–144998. [Google Scholar] [CrossRef]
- Zhao, S.; Su, T.; Zhao, D. Interactive vehicle driving intention recognition and trajectory prediction based on graph neural network. Automob. Technol. 2023, 7, 24–30. [Google Scholar]
- Yang, Y.; Gao, K.; Cui, S.; Xue, Y.; Najafi, A.; Andric, J. Data-driven rolling eco-speed optimization for autonomous vehicles. Front. Eng. Manag. 2024, 1–13. [Google Scholar] [CrossRef]
- Niu, Z.; Zhong, G.; Yu, H. A review on the attention mechanism of deep learning. Neurocomputing 2021, 452, 48–62. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting system. In Proceedings of the 22nd ACM Sigkdd International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Zhang, X.; Wang, X. Research Review of Grey Wolf Optimization Algorithm. Comput. Sci. 2019, 46, 30–38. [Google Scholar]
- Krajewski, R.; Bock, J.; Kloeker, L.; Eckstein, L. The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for valIDation of highly automated driving systems. In Proceedings of the 2018 21st IEEE International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2118–2125. [Google Scholar]
- Hu, S.Q.; Jing, Z.L. A Survey of Particle Filter Algorithms. Control Decis. Mak. 2005, 20, 361–365. [Google Scholar]
- Tang, R.; Yang, Z.; Lu, J.; Liu, H.; Zhang, H. Real-time trajectory prediction of unmanned aircraft vehicles based on gated recurrent unit. In Green Connected Automated Transportation and Safety, Proceedings of the 11th International Conference on Green Intelligent Transportation Systems and Safety; Springer: Singapore, 2021; pp. 585–596. [Google Scholar]
- Wu, J.; Zheng, X.; Wang, J.; Wu, J.; Wang, J. AB-GRU: An attention-based bidirectional GRU model for multimodal sentiment fusion and analysis. Math. Biosci. Eng. 2023, 20, 18523–18544. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Dai, W.; Hu, Y.; Li, J. Speech emotion recognition model based on Bi-GRU and Focal Loss. Pattern Recognit. Lett. 2020, 140, 358–365. [Google Scholar] [CrossRef]
- Alonso, A.M.; Nogales, F.J.; Ruiz, C. A single scalable LSTM model for short-term forecasting of massive electricity time series. Energies 2020, 13, 5328. [Google Scholar] [CrossRef]
- Yuan, R.; Li, H. An Image Captioning Model Based on SE-ResNest and EMSA. In Proceedings of the 2023 IEEE 6th International Conference on Pattern Recognition and Artificial Intelligence (PRAI), Haikou, China, 18–20 August 2023; pp. 681–686. [Google Scholar]
- Schubert, R.; Adam, C.; Obst, M.; Mattern, N.; Leonhardt, V.; Wanielik, G. Empirical evaluation of vehicular models for ego motion estimation. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011. [Google Scholar]
- Qiao, S.J.; Han, N.; Zhu, X.W.; Shu, H.; Zheng, J.; Yuan, C. Dynamic trajectory prediction algorithm based on Kalman filter. J. Electron. 2018, 46, 6. [Google Scholar]
- Hartigan, J.A. Bayes Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Charbuty, B.; Abdulazeez, A. Classification based on decision tree algorithm for machine learning. J. Appl. Sci. Technol. Trends 2021, 2, 20–28. [Google Scholar] [CrossRef]
- Abdullah, D.M.; Abdulazeez, A.M. Machine learning applications based on SVM classification a review. Qubahan Acad. J. 2021, 1, 81–90. [Google Scholar] [CrossRef]
- Rigatti, S.J. Random forest. J. Insur. Med. 2017, 47, 31–39. [Google Scholar] [CrossRef] [PubMed]
- Manoharan, J.S. Study of variants of extreme learning machine (ELM) brands and its performance measure on classification algorithm. J. Soft Comput. Paradig. (JSCP) 2021, 3, 83–95. [Google Scholar]
- Chen, J.; Liu, Z.X.; Yin, Z.T.; Liu, X.; Li, X.L.; Yin, L.R.; Zheng, W.F. Predict the effect of meteorological factors on haze using BP neural network. Urban Clim. 2023, 51, 101630. [Google Scholar] [CrossRef]
- Markoulidakis, I.; Kopsiaftis, G.; Rallis, I.; Georgoulas, I. Multi-class confusion matrix reduction method and its application on net promoter score classification problem. In Proceedings of the 14th Pervasive Technologies Related to Assistive Environments Conference, Corfu, Greece, 29 June–2 July 2021; pp. 412–419. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frame | ID | X | Y | X Velocity | Y Velocity | X Acceleration | Y Acceleration | Theta |
|---|---|---|---|---|---|---|---|---|
| 1352 | 219 | 3.800 | 25.1200 | 19.8800 | 0.1600 | −0.1100 | −0.0200 | 0.0080 |
| 1353 | 219 | 4.5900 | 25.1200 | 19.8700 | 0.1600 | −0.1100 | −0.0300 | 0.0080 |
| 1354 | 219 | 5.3800 | 25.1300 | 19.8700 | 0.1500 | −0.1100 | −0.0300 | 0.0075 |
| 1355 | 219 | 6.1800 | 25.1400 | 19.8600 | 0.1500 | −0.1200 | −0.0400 | 0.0075 |
| 1356 | 219 | 6.9800 | 25.1400 | 19.8600 | 0.1500 | −0.1200 | −0.0400 | 0.0075 |
| 1357 | 219 | 7.7800 | 25.1500 | 19.8600 | 0.1400 | −0.1300 | −0.0400 | 0.0070 |
| 1358 | 219 | 8.5700 | 25.1500 | 19.8500 | 0.1400 | −0.1400 | −0.0500 | 0.0070 |
| 1359 | 219 | 9.3800 | 25.1600 | 19.8500 | 0.1300 | −0.1400 | −0.0500 | 0.0065 |
| 1360 | 219 | 10.1700 | 25.1600 | 19.8400 | 0.1300 | −0.1500 | −0.0500 | 0.0065 |
| 1361 | 219 | 10.9700 | 25.1600 | 19.8300 | 0.1200 | −0.1600 | −0.0500 | 0.0060 |
| Advance Prediction Time-Domain | Evaluation Index | Vehicle Trajectory Prediction Model | |||||
|---|---|---|---|---|---|---|---|
| Bilayer-GRU-Att | Bilayer-GRU | Single-GRU | Bi-GRU | Single-LSTM | Bilayer-LSTM | ||
| tpred = 0.0 s | RMSE/m | 3.9535 | 4.6358 | 5.0859 | 5.1751 | 5.0907 | 5.6122 |
| ADE/m | 3.0305 | 3.9683 | 4.4152 | 4.4672 | 4.3826 | 4.9689 | |
| FDE/m | 5.5402 | 7.7539 | 9.4478 | 9.3142 | 8.5048 | 7.2470 | |
| PTC/ms | 29.9526 | 27.6731 | 26.5046 | 30.3257 | 35.4763 | 38.5224 | |
| tpred = 0.4 s | RMSE/m | 4.0622 | 4.7914 | 5.2472 | 5.3430 | 5.2632 | 5.9603 |
| ADE/m | 3.1178 | 4.1332 | 4.5290 | 4.5997 | 4.4950 | 5.2644 | |
| FDE/m | 5.7699 | 8.0921 | 9.8209 | 9.6874 | 8.8324 | 7.5189 | |
| PTC/ms | 30.7508 | 28.5756 | 26.9144 | 31.3932 | 36.8574 | 40.4592 | |
| tpred = 0.8 s | RMSE/m | 4.2005 | 4.9402 | 5.3714 | 5.4546 | 5.3908 | 6.1985 |
| ADE/m | 3.2219 | 4.2901 | 4.6375 | 4.6807 | 4.5648 | 5.4640 | |
| FDE/m | 5.9862 | 8.4817 | 10.0423 | 9.8875 | 8.9610 | 7.5816 | |
| PTC/ms | 31.6852 | 29.3051 | 27.4945 | 32.7618 | 38.4371 | 42.7675 | |
| tpred = 1.2 s | RMSE/m | 4.2705 | 5.0745 | 5.4794 | 5.5354 | 5.4966 | 6.3727 |
| ADE/m | 3.2654 | 4.4302 | 4.7375 | 4.7297 | 4.6181 | 5.6077 | |
| FDE/m | 6.1777 | 8.7548 | 10.2198 | 10.0186 | 9.0137 | 7.5324 | |
| PTC/ms | 32.3931 | 30.1777 | 27.9324 | 33.6674 | 40.2769 | 45.0985 | |
| tpred = 1.6 s | RMSE/m | 4.2795 | 5.1900 | 5.6276 | 5.6487 | 5.6461 | 6.5487 |
| ADE/m | 3.2444 | 4.5537 | 4.8826 | 4.7959 | 4.7144 | 5.7618 | |
| FDE/m | 6.3714 | 8.9751 | 10.4696 | 10.2172 | 9.1574 | 7.5723 | |
| PTC/ms | 33.9952 | 30.9751 | 28.6077 | 34.4376 | 42.8436 | 48.2981 | |
| tpred = 2.0 s | RMSE/m | 4.2965 | 5.2976 | 5.7988 | 5.7900 | 5.8240 | 6.7437 |
| ADE/m | 3.2112 | 4.6644 | 5.0499 | 4.8803 | 4.8588 | 5.9391 | |
| FDE/m | 6.5808 | 9.2402 | 10.7859 | 10.5039 | 9.3998 | 7.7354 | |
| PTC/ms | 34.4371 | 31.7635 | 29.0248 | 35.1153 | 45.2921 | 51.0654 | |
| Predictive Intent | Turning Left | Going Straight | Turning Right | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ELM | BP | GWO-XGBoost | ELM | BP | GWO-XGBoost | ELM | BP | GWO-XGBoost | ||
| Real intention | Turning left | 5717 | 6357 | 7529 | 2312 | 1627 | 598 | 104 | 149 | 6 |
| Going straight | 186 | 178 | 65 | 79,843 | 80,326 | 80,566 | 637 | 162 | 35 | |
| Turning right | 122 | 95 | 0 | 795 | 462 | 45 | 7472 | 7832 | 8344 | |
| Precision Rate | Recall Rate | F1 Score | Accuracy Rate | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Evaluation Index | ELM | BP | GWO-XGBoost | ELM | BP | GWO-XGBoost | ELM | BP | GWO-XGBoost | ELM | BP | GWO-XGBoost |
| Turning left | 0.7029 | 0.7816 | 0.9257 | 0.9489 | 0.9588 | 0.9914 | 0.8076 | 0.8612 | 0.9574 | 0.9572 | 0.9725 | 0.9923 |
| Going straight | 0.9898 | 0.9958 | 0.9988 | 0.9625 | 0.9747 | 0.9921 | 0.9760 | 0.9851 | 0.9954 | |||
| Turning right | 0.8907 | 0.9336 | 0.9946 | 0.9098 | 0.9618 | 0.9951 | 0.9001 | 0.9475 | 0.9948 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Guan, Z.; Liu, J.; Zhao, J. Research on the Driving Behavior and Decision-Making of Autonomous Vehicles (AVs) in Mixed Traffic Flow by Integrating Bilayer-GRU-Att and GWO-XGBoost Models. World Electr. Veh. J. 2024, 15, 333. https://doi.org/10.3390/wevj15080333
Wang L, Guan Z, Liu J, Zhao J. Research on the Driving Behavior and Decision-Making of Autonomous Vehicles (AVs) in Mixed Traffic Flow by Integrating Bilayer-GRU-Att and GWO-XGBoost Models. World Electric Vehicle Journal. 2024; 15(8):333. https://doi.org/10.3390/wevj15080333
Chicago/Turabian StyleWang, Lei, Zhiwei Guan, Jian Liu, and Jianyou Zhao. 2024. "Research on the Driving Behavior and Decision-Making of Autonomous Vehicles (AVs) in Mixed Traffic Flow by Integrating Bilayer-GRU-Att and GWO-XGBoost Models" World Electric Vehicle Journal 15, no. 8: 333. https://doi.org/10.3390/wevj15080333