
Investigation of the Smoothness of an Intelligent Chassis in Electric Vehicles

Abstract
1. Introduction
2. Intelligent Chassis Structure and Configuration for Electric Vehicles
2.1. Examination of the Intelligent Chassis Structure and Configuration of Electric Vehicles
2.1.1. Primary Energy Subsystems
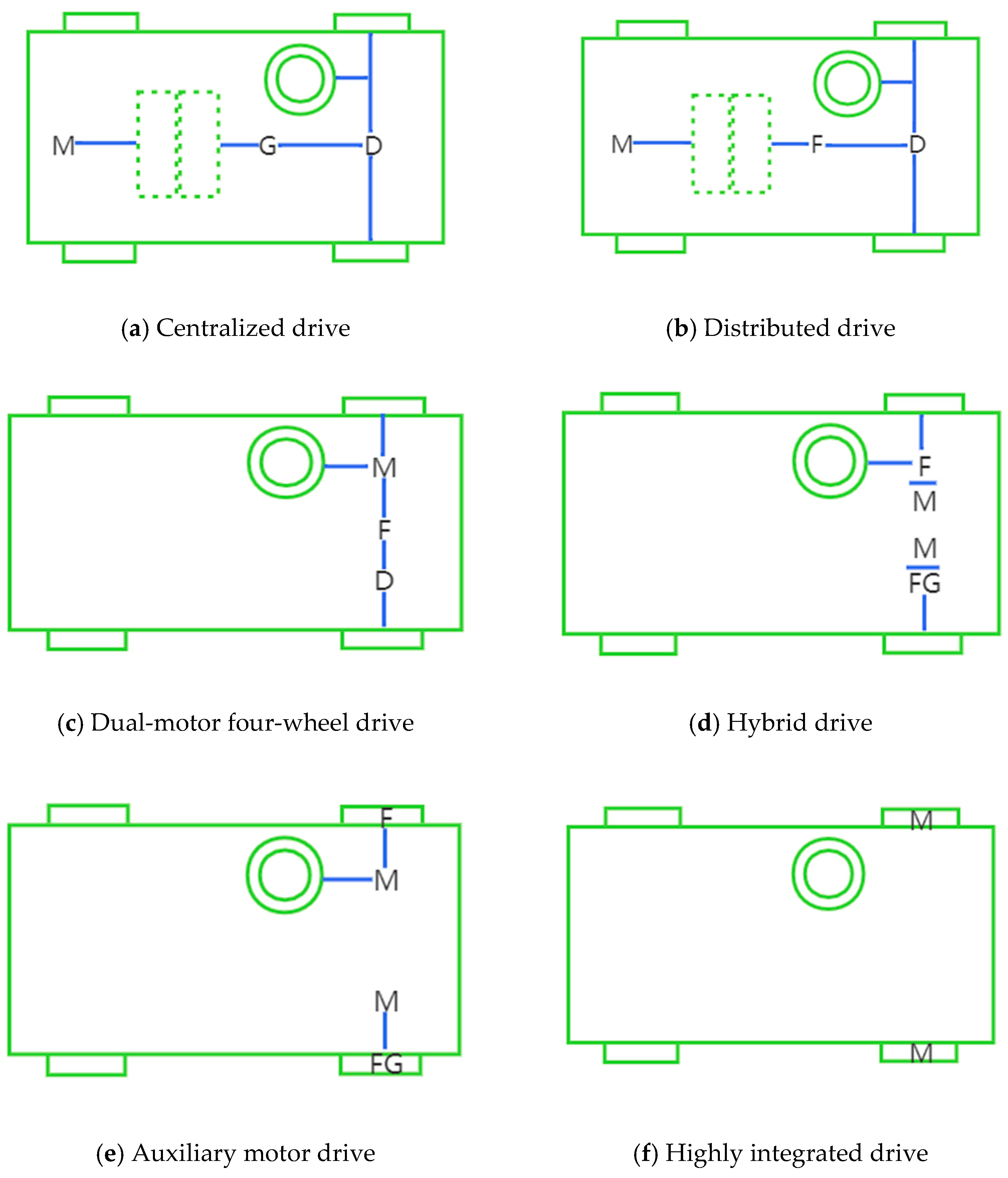
2.1.2. Power Drive Subsystems
2.1.3. Auxiliary Control Subsystems
2.2. Examination of Suspension Effects on Chassis Structure Smoothness
2.2.1. Human Reaction to Vibration and Assessment Metrics of Vehicle Smoothness
2.2.2. Impacts of Vehicle Suspension Parameters on Ride Smoothness
3. Research on the Vibration Theory Modeling of Electric Vehicle Intelligent Chassis
3.1. Vibration Analysis of One-Quarter Vehicle Suspension Systems
3.1.1. Simplification of the Complete Vehicle Model
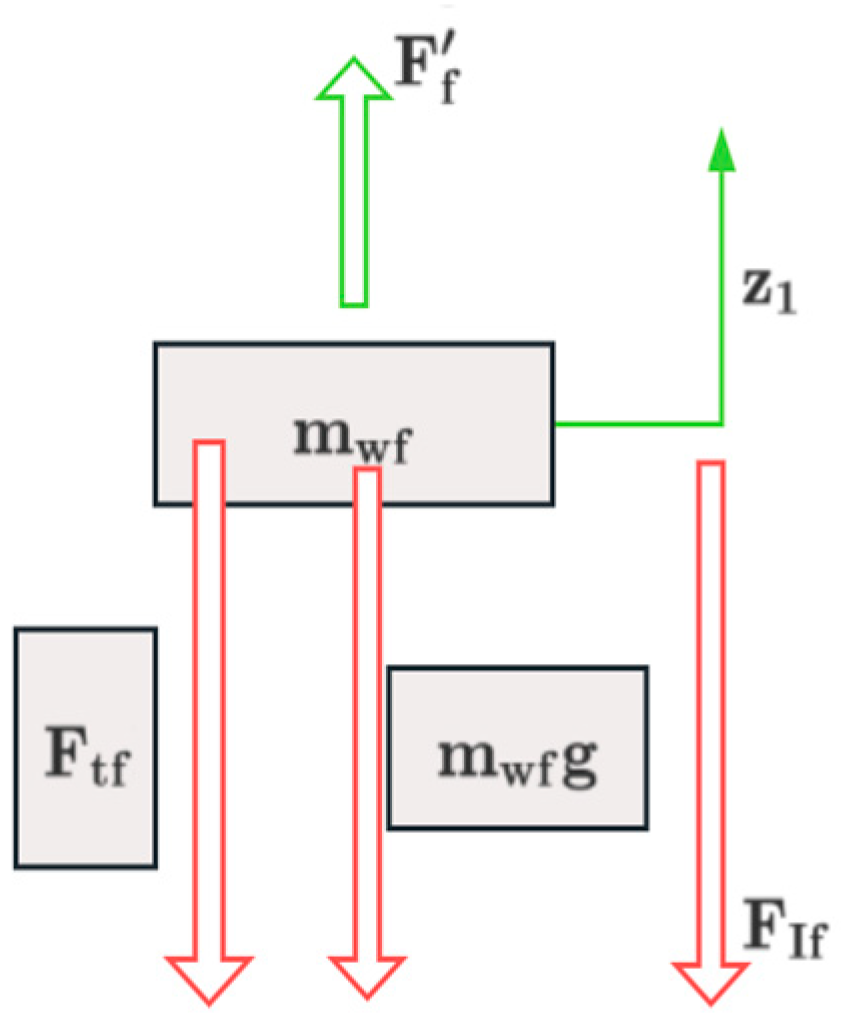
3.1.2. Mathematical Modeling of a Two-Mass Vibration System
3.2. Dynamics of a One-Half Vehicle Suspension System
3.3. Dynamic Characterization of a Nine-Degree-of-Freedom Vehicle Model for the Entire Vehicle
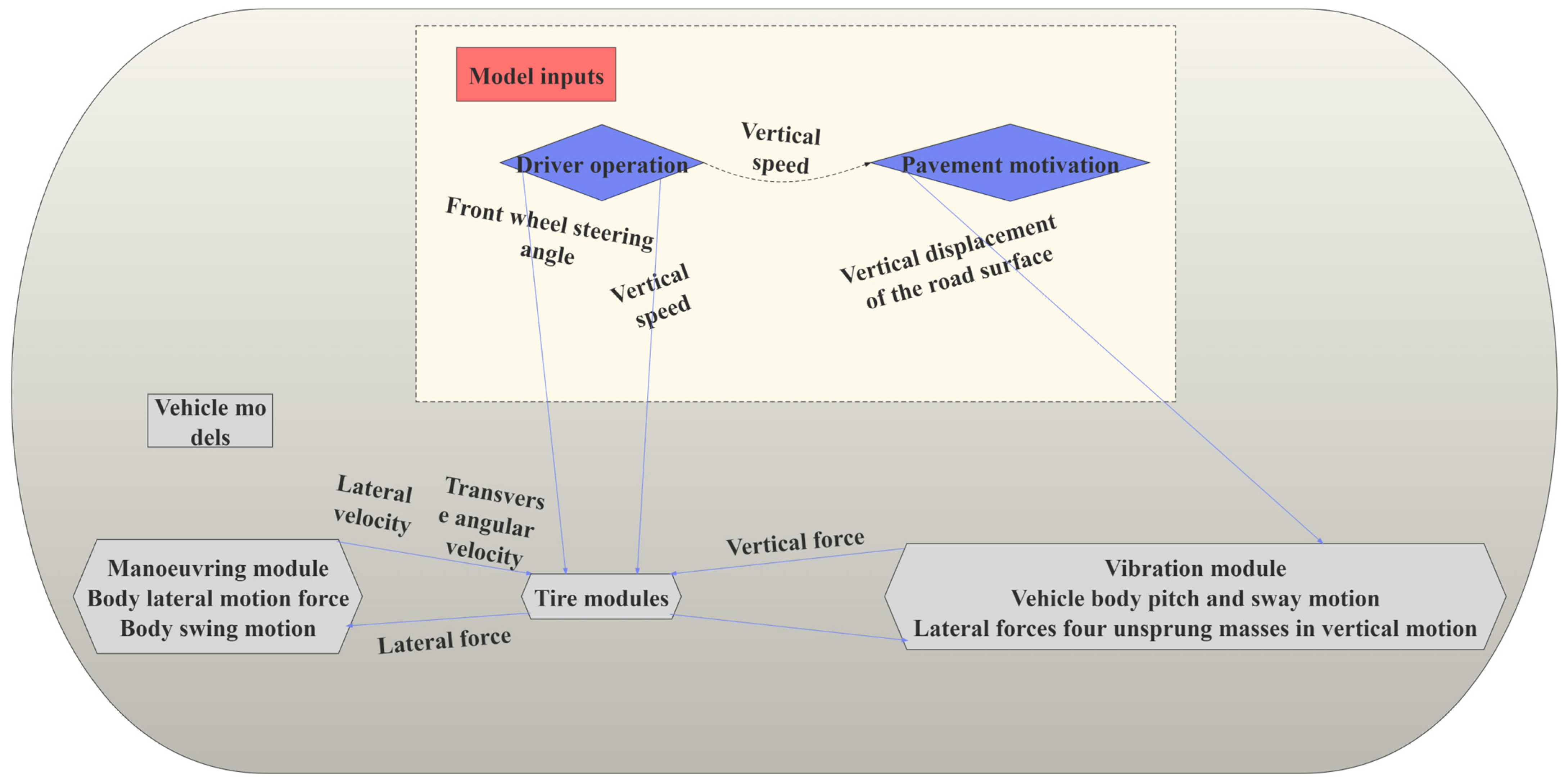
3.3.1. Principles of the Co-Simulation Model
3.3.2. Mathematical Modeling
4. Modeling and Analysis of the Smoothness of a Smart Chassis for Electric Vehicles
4.1. Theory of Multibody System Dynamics for ADAMS
4.2. Modeling of Chassis and Suspension Dynamics
4.2.1. Comparative Analysis of Chassis Design and Suspension Systems in Electric and Conventional Vehicles
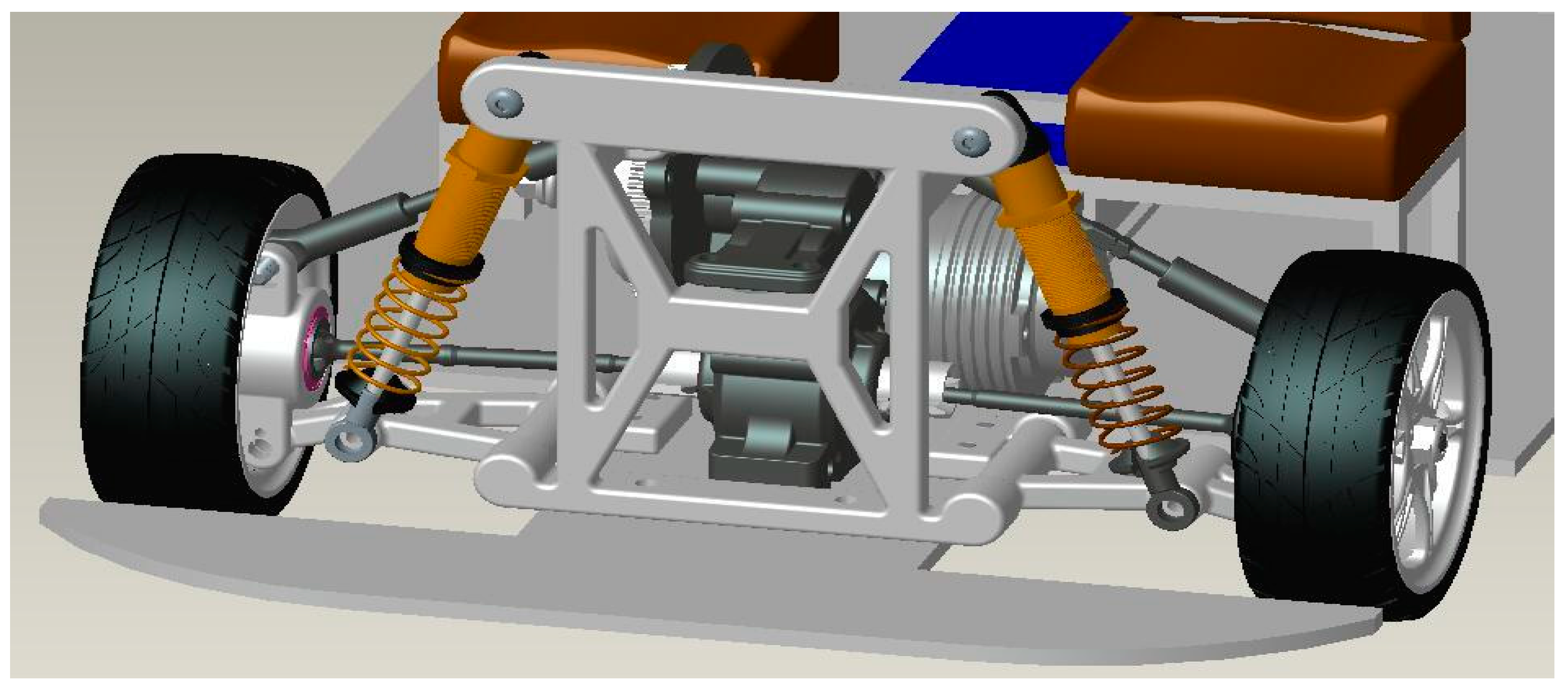
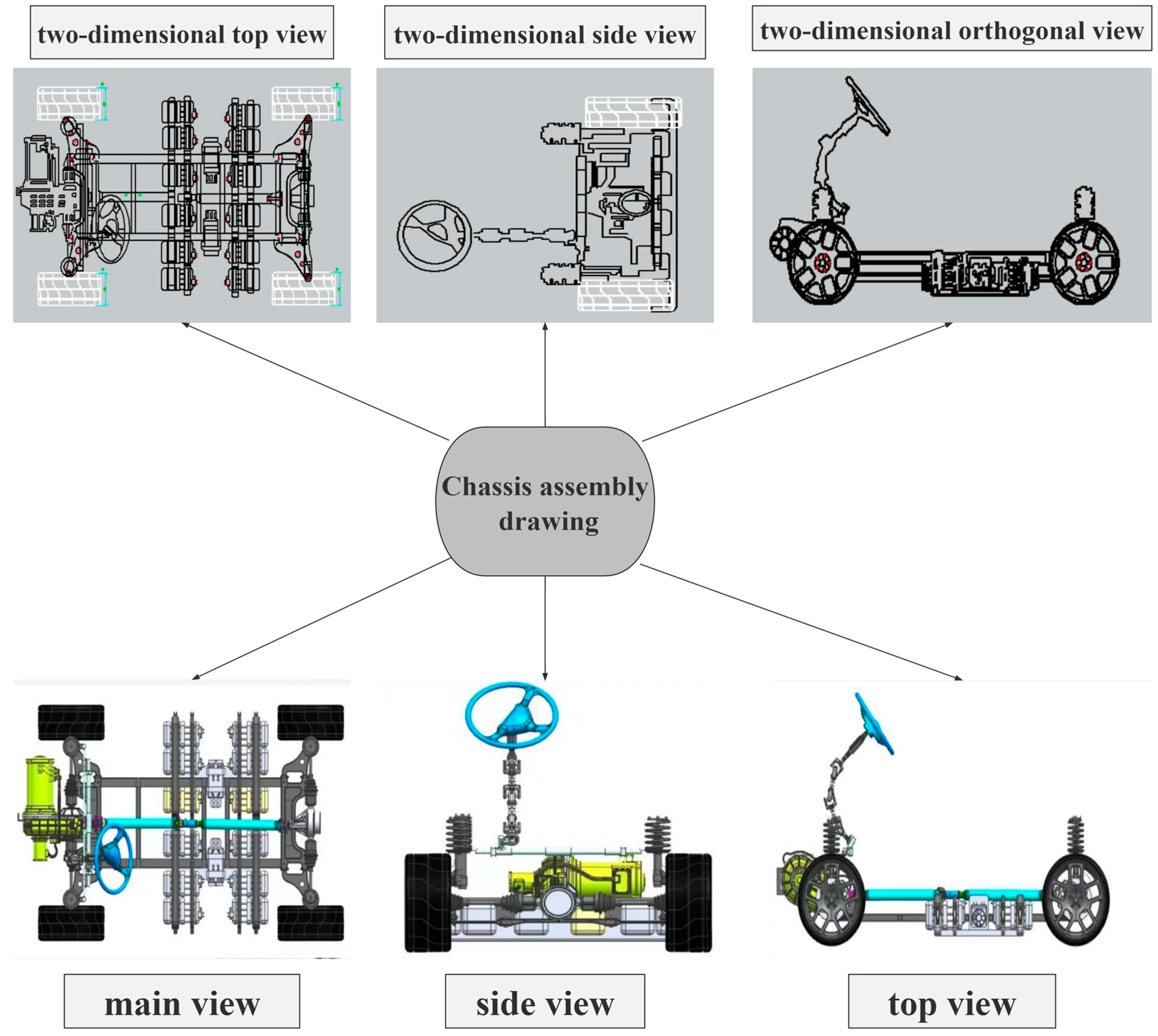
4.2.2. Simulation Model and Multi-View Representation of the Electric Vehicle Chassis Suspension System
4.3. Simulation Analysis of the Model and Optimized Design
4.3.1. Simulation Analysis of the Model
4.3.2. Optimized Model Design
5. Conclusions
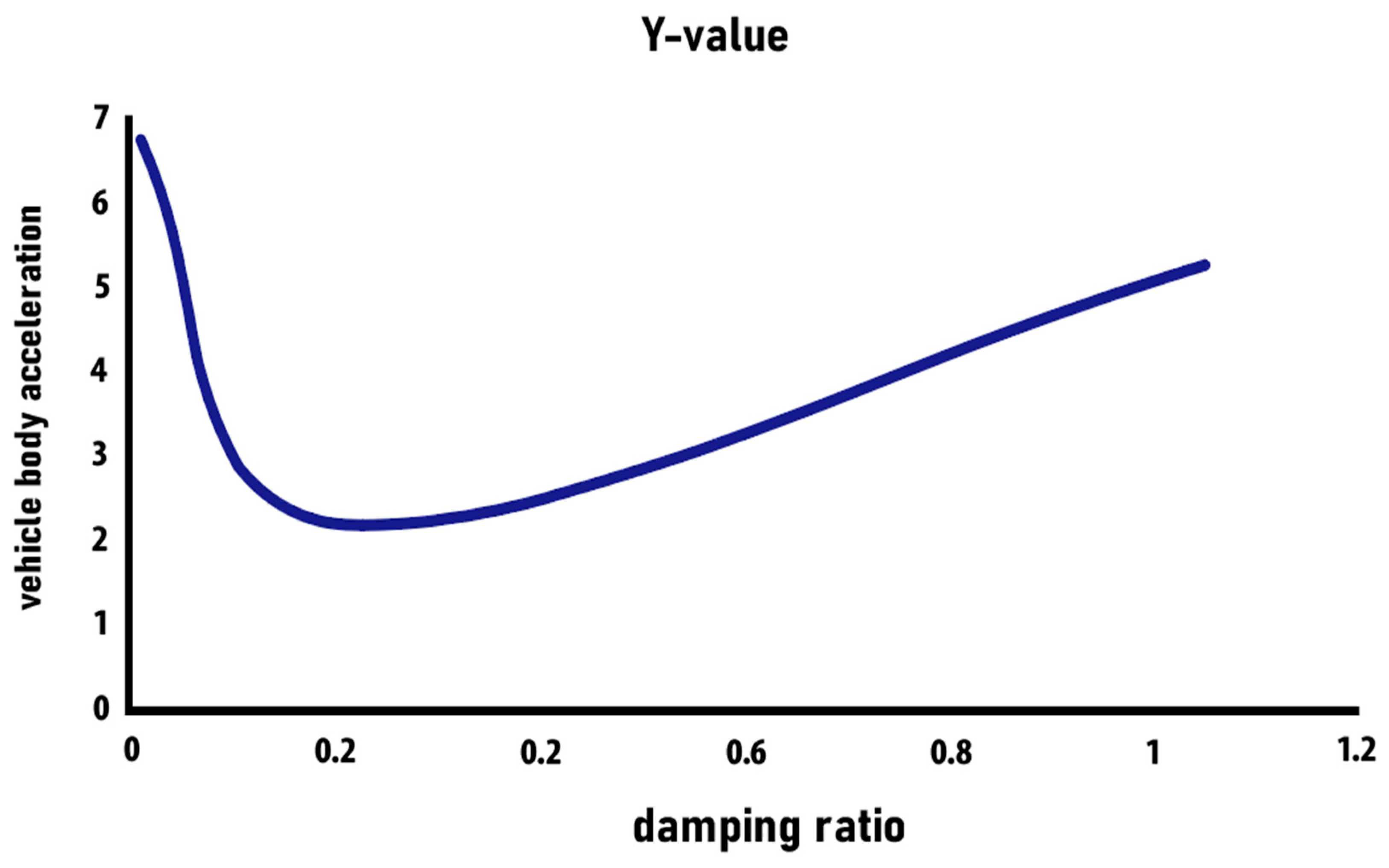
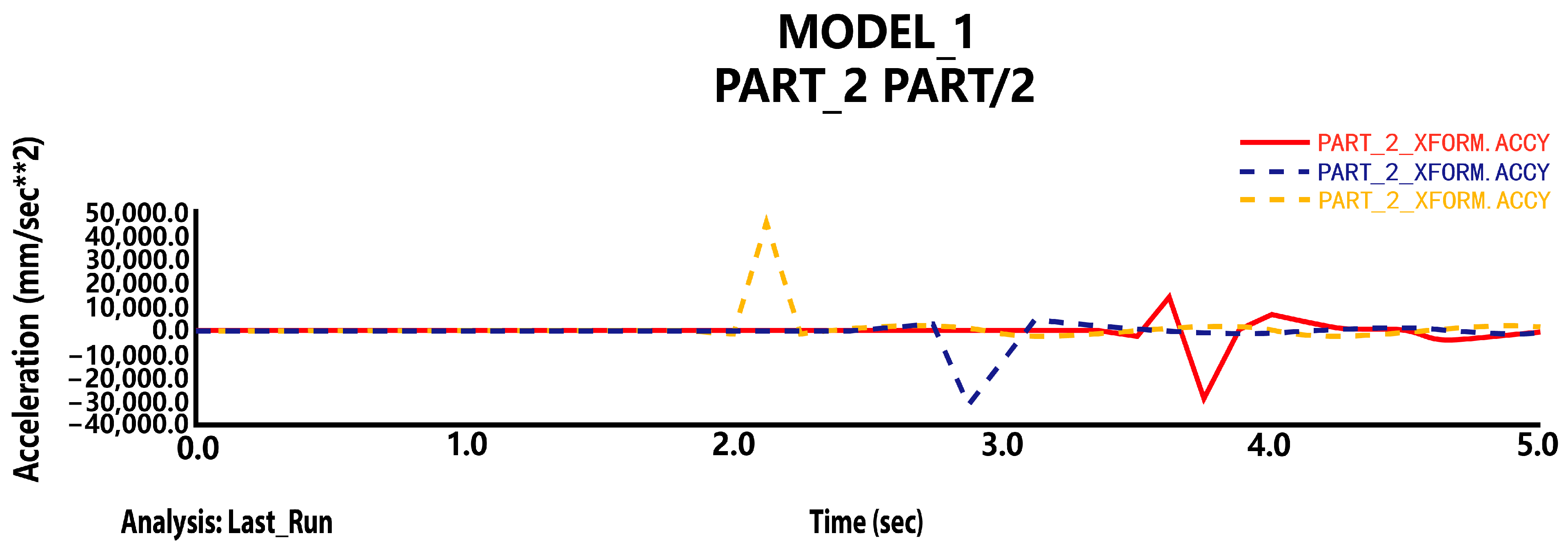
- Quantitative effect of suspension parameters on vehicle smoothness: The simulation investigation using ADAMS software reveals that changing the suspension damping ratio has a considerable impact on vehicle smoothness. The root mean square (RMS) value of the vehicle’s vertical acceleration is lowered by approximately 15% between damping ratios of 0.1748 and 0.4136, and this result is constant across varied road conditions. In addition, the modal analysis reveals that the first-order and second-order principal vibration patterns of the vehicle contribute to the smoothness by 45% and 30%, respectively.
- Multiple-case validation of the dynamic model: The established dynamic model has a strong predictive ability under a variety of road situations. In simulation testing on conventional asphalt pavement, gravel pavement, and bumpy pavement, the correlation coefficients between the model-predicted vibration responses and actual measured values were greater than 0.95, with typical absolute errors of less than 5%. This suggests that the model is highly accurate and stable, making it suited for a smoothness analysis under a variety of operating settings.
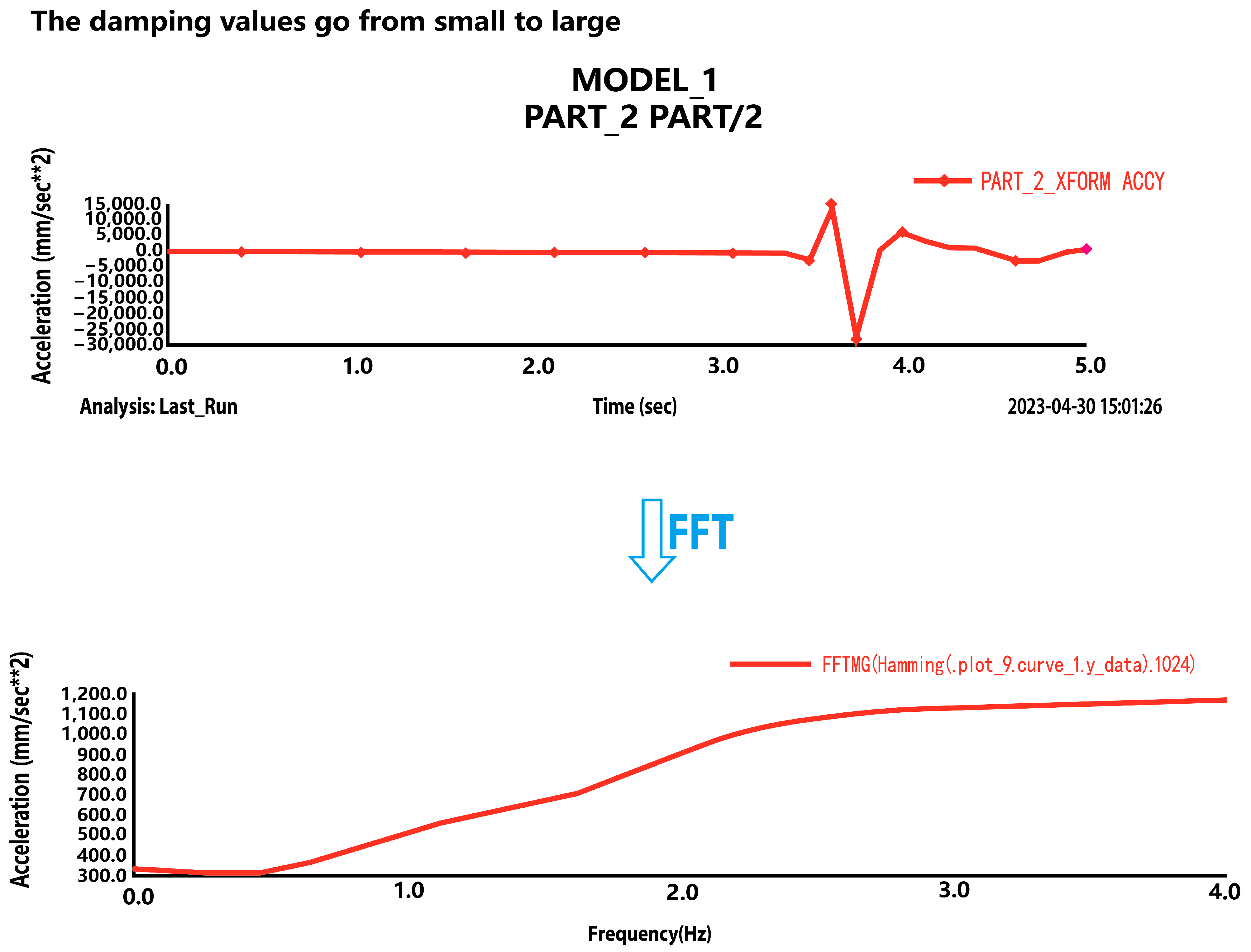
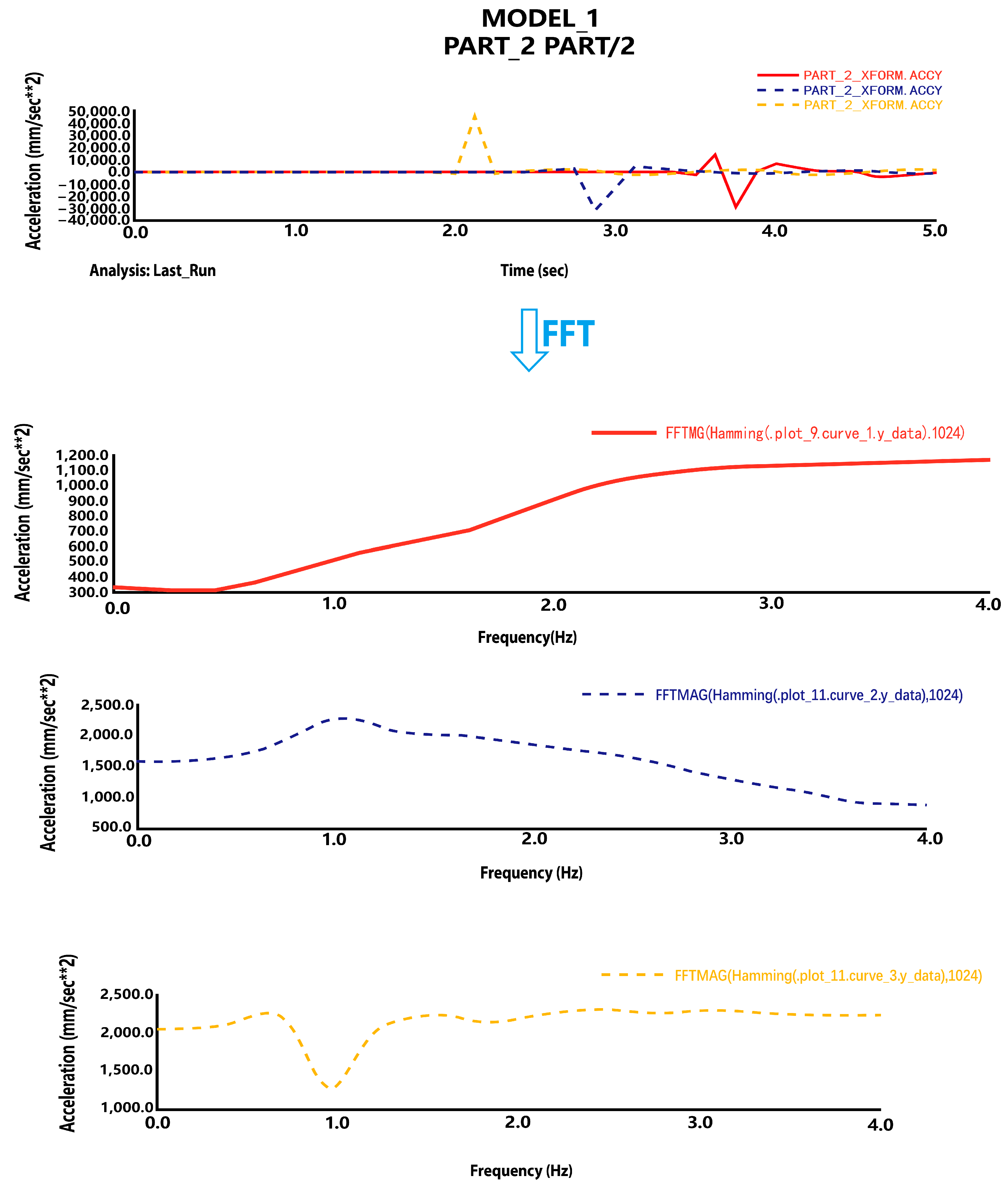
- In-depth insights from modal and frequency domain analyses: The modal analysis reveals the vibration characteristics of the vehicle at different frequencies, with the 1–2 Hz and 5–6 Hz modes having the most significant impact on vehicle smoothness. The frequency domain analysis further indicates that the spectral density of the vehicle’s vibration acceleration is greatest in the frequency range of 2–4 Hz, which is highly consistent with the frequency range of the human body.
6. Discussion
- Suspension parameter optimization can improve ride comfort: The findings of this study demonstrate the potential for improved ride comfort through a suspension parameter adjustment. An appropriate decrease in the damping value not only increases vehicle smoothness but may also enhance passenger ride pleasure. This conclusion has significant implications for the design of an intelligent chassis for electric cars, as well as a new area for future study, namely, investigating adaptive tuning techniques for suspension characteristics to adapt to varied road and driving circumstances.
- Widespread application of the dynamic model in vehicle performance evaluations: The dynamic model developed in this study can be extended and applied to a variety of aspects, including vehicle handling stability and durability evaluation. This provides a useful tool for evaluating the overall performance of electric cars and has several application possibilities. Future studies might investigate the model’s applicability and accuracy across multiple vehicle types and setups for broader applications.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lei, L.; Hu, Y.; Jing, J.; Guang, G. Smoothness analysis of special chassis for electric vehicles based on ADAMS. Automot. Eng. 2019, 1, 68–72. [Google Scholar]
- Gu, Y.; Hu, W.; Chen, J. Development Requirements and Implementation Strategies of Electric Vehicle Chassis Platform. Automot. Util. Technol. 2020, 12, 32–34. [Google Scholar]
- Yin, G.; Zhu, D.; Ren, Z.; Li, G.; Jin, X. Multi-agent based intelligent control system framework for electric vehicle chassis. China Mech. Eng. 2018, 15, 1796–1801. [Google Scholar]
- Tong, J.; Cai, X. Research on intelligent control system of electric vehicle chassis based on Agent technology. J. Shaoguan Coll. 2019, 12, 36–42. [Google Scholar]
- Lei, L.; Hu, Y.; Jing, J.; Wang, G. Smoothness optimization of wheel motor-specific chassis based on ADAMS. J. Hubei Ind. Vocat. Tech. Coll. 2019, 32, 68–72. [Google Scholar]
- Mirzaeinejad, H.; Mirzaei, M.; Rafatnia, S. A novel technique for optimal integration of active steering and differential braking with estimation to improve vehicle directional stability. ISA Trans. 2018, 80, 513–527. [Google Scholar] [CrossRef] [PubMed]
- Rengaraj, C.; Crolla, D. Integrated Chassis Control to Improve Vehicle Handling Dynamics Performance; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Cavazzuti, M.; Baldini, A.; Bertocchi, E.; Costi, D.; Torricelli, E.; Moruzzi, P. High performance automotive chassis design: A topology optimization based approach. Struct. Multidiscip. Optim. 2011, 44, 45–56. [Google Scholar] [CrossRef]
- Sharmila, B.; Srinivasan, K.; Devasena, D.; Suresh, M.; Panchal, H.; Ashokkumar, R.; Meenakumari, R.; Kumar Sadasivuni, K.; Shah, R.R. Modelling and performance analysis of electric vehicle. Int. J. Ambient. Energy 2022, 43, 5034–5040. [Google Scholar] [CrossRef]
- Yasar, A.; Bircan, D.A. Design, analysis and optimization of heavy vehicle chassis using finite element analysis. Int. J. Sci. Technol. Res 2015, 1, 1–9. [Google Scholar]
- Heising, B.; Else, M. Automobile Chassis Manual; Mechanical Industry Press: Beijing, China, 2012; pp. 736–740. [Google Scholar]
- Yu, C.S. Theory of Automobile; Mechanical Industry Press: Beijing, China, 2008. [Google Scholar]
- Long, L.X.; Quynh, L.V.; Cuong, B.V. Study on the influence of bus suspension parameters on ride comfort. Vibroengineering Procedia 2018, 21, 77–82. [Google Scholar] [CrossRef]
- Wang, C.; Liu, Y. Evaluation indexes and influencing factors of automobile traveling smoothness. Econ. Tech. Coop. Inf. 2010, 15, 228. [Google Scholar]
- Liu, W. Automotive Design; Tsinghua University Press: Beijing, China, 2001. [Google Scholar]
- Zheng, J. Influence of automobile suspension parameters on smoothness. Mod. Manuf. Technol. Equip. 2020, 56, 127–128+131. [Google Scholar]
- Peng, M.; Diao, Z.; Dang, X. Design Calculation of Automobile Suspension Construction; Mechanical Industry Publishing: Beijing, China, 2012. [Google Scholar]
- Yan, H.; Peng, W.; Lu, H.; Qiao, Q. Research on vibration characteristics of quarter vehicle suspension system. Manuf. Autom. 2014, 36, 89–91. [Google Scholar]
- Tang, Z. Dynamic simulation study of one-half vehicle suspension system. Road Veh. Transp. 2015, 1, 5–8+56. [Google Scholar]
- Chen, S.; Meng, S.; Li, G.; Qin, Y.; Qu, X. Research on joint simulation model of vehicle smoothness and maneuvering stability. Agric. Equip. Veh. Eng. 2016, 54, 12–16. [Google Scholar]
- Pacejka, H.B. Tyre and Xehicle Dynamics, 2nd ed.; Elsevier: London, UK, 2006. [Google Scholar]
- Gong, P.; Hu, R.; Kang, S. ADAMS 2014 Virtual Prototyping from Beginner to Master; Mechanical Industry Press: Beijing, China, 2015. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ) | Subjective Perception of the Human Body |
|---|---|
| <0.315 | It is not uncomfortable. |
| 0.315~0.63 | Slightly uncomfortable |
| 0.5~1.0 | Feel ill |
| 0.8~1.6 | Uncomfortable |
| 1.25~2.5 | It is very uncomfortable. |
| >2.0 | Dreadfully uncomfortable |
| Vehicle Type | Suspensions | Damping Ratio |
|---|---|---|
| Enclosed Carriage | front suspension | 0.4 |
| rear suspension | 0.2 | |
| Lorry | front suspension | 0.4 |
| rear suspension | 0.3 |
| Eigenvalues (Time = 5.0) | ||||
|---|---|---|---|---|
| Frequency Units (Hz) | ||||
| Mode Number | Undamped Natural Frequency | Damping Ratio | Real | Imaginary |
| 1 | 7.80 × 10−1 | 6.88 × 10−2 | 5.37 × 10−2 +/− | 7.78 × 10−1 |
| 2 | 8.89 × 10−1 | 3.98 × 10−0 | −3.54 × 10−2 +/− | 8.89 × 10−1 |
| 3 | 9.41 × 10−1 | 2.82 × 10−0 | −2.67 × 10−2 +/− | 9.40 × 10−1 |
| 4 | 6.13 × 100 | 3.36 × 10−0 | −2.06 × 100 +/− | 5.78 × 100 |
| 5 | 6.23 × 100 | 8.17 × 10−0 | −5.10 × 10−1 +/− | 6.21 × 100 |
| 6 | 7.37 × 100 | 1.94 × 10−1 | −1.430 × 100 +/− | 7.23 × 100 |
| Eigenvalues (Time = 5.0) | ||||
|---|---|---|---|---|
| Frequency Units (Hz) | ||||
| Mode Number | Undamped Natural Frequency | Damping Ratio | Real | Imaginary |
| 1 | 7.68 × 10−1 | 1.23 × 10−1 | 9.41 × 10−2 +/− | 7.63 × 10−1 |
| 2 | 8.73 × 10−1 | 4.69 × 10−4 | −4.09 × 10−4 +/− | 8.73 × 10−1 |
| 3 | 9.29 × 10−1 | 3.23 × 10−2 | −3.00 × 10−2 +/− | 9.28 × 10−1 |
| 4 | 5.18 × 100 | 4.99 × 10−1 | −2.59 × 100 +/− | 4.49 × 100 |
| 5 | 6.22 × 100 | 1.46 × 10−1 | −9.07 × 10−1 +/− | 6.15 × 100 |
| 6 | 7.19 × 100 | 2.24 × 10−1 | −1.61 × 100 +/− | 7.01 × 100 |
| Eigenvalues (Time = 5.0) | ||||
|---|---|---|---|---|
| Frequency Units (Hz) | ||||
| Mode Number | Undamped Natural Frequency | Damping Ratio | Real | Imaginary |
| 1 | 7.750 × 10−1 | 6.07 × 10−2 | 4.70 × 10−2 +/− | 7.73 × 10−1 |
| 2 | 8.79 × 10−1 | 6.34 × 10−4 | −5.57 × 10−4 +/− | 8.79 × 10−1 |
| 3 | 9.36 × 10−1 | 4.64 × 10−2 | −4.34 × 10−2 +/− | 9.35 × 10−1 |
| 4 | 6.29 × 100 | 5.16 × 10−1 | −3.25 × 100 +/− | 5.38 × 100 |
| 5 | 6.20 × 100 | 1.27 × 10−1 | −7.89 × 10−1 +/− | 6.15 × 100 |
| 6 | 7.33 × 100 | 3.18 × 10−1 | −2.33 × 100 +/− | 6.95 × 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, C.; Wang, Z.; Wu, T.; Su, J. Investigation of the Smoothness of an Intelligent Chassis in Electric Vehicles. World Electr. Veh. J. 2025, 16, 219. https://doi.org/10.3390/wevj16040219
Ma C, Wang Z, Wu T, Su J. Investigation of the Smoothness of an Intelligent Chassis in Electric Vehicles. World Electric Vehicle Journal. 2025; 16(4):219. https://doi.org/10.3390/wevj16040219
Chicago/Turabian StyleMa, Chuzhao, Zhengyi Wang, Ti Wu, and Jintao Su. 2025. "Investigation of the Smoothness of an Intelligent Chassis in Electric Vehicles" World Electric Vehicle Journal 16, no. 4: 219. https://doi.org/10.3390/wevj16040219
APA StyleMa, C., Wang, Z., Wu, T., & Su, J. (2025). Investigation of the Smoothness of an Intelligent Chassis in Electric Vehicles. World Electric Vehicle Journal, 16(4), 219. https://doi.org/10.3390/wevj16040219