
Research on Trajectory Prediction Based on Front Vehicle Sideslip Recognition

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Preamble
2. Introduction
2.1. Characterization of Forward Vehicle Skidding
Sideslip Scene
2.2. Sideslip Feature Extraction
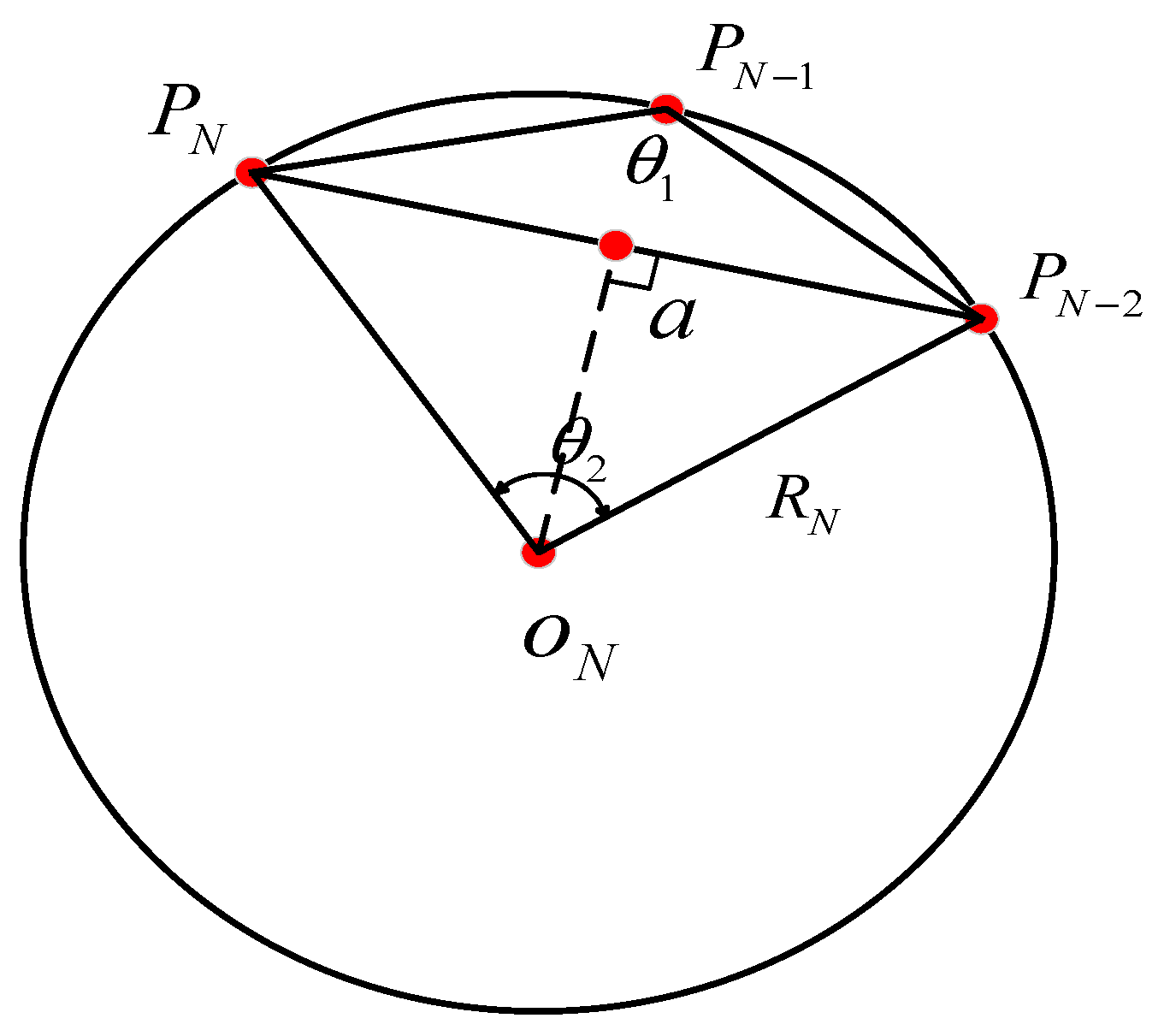
- (1)
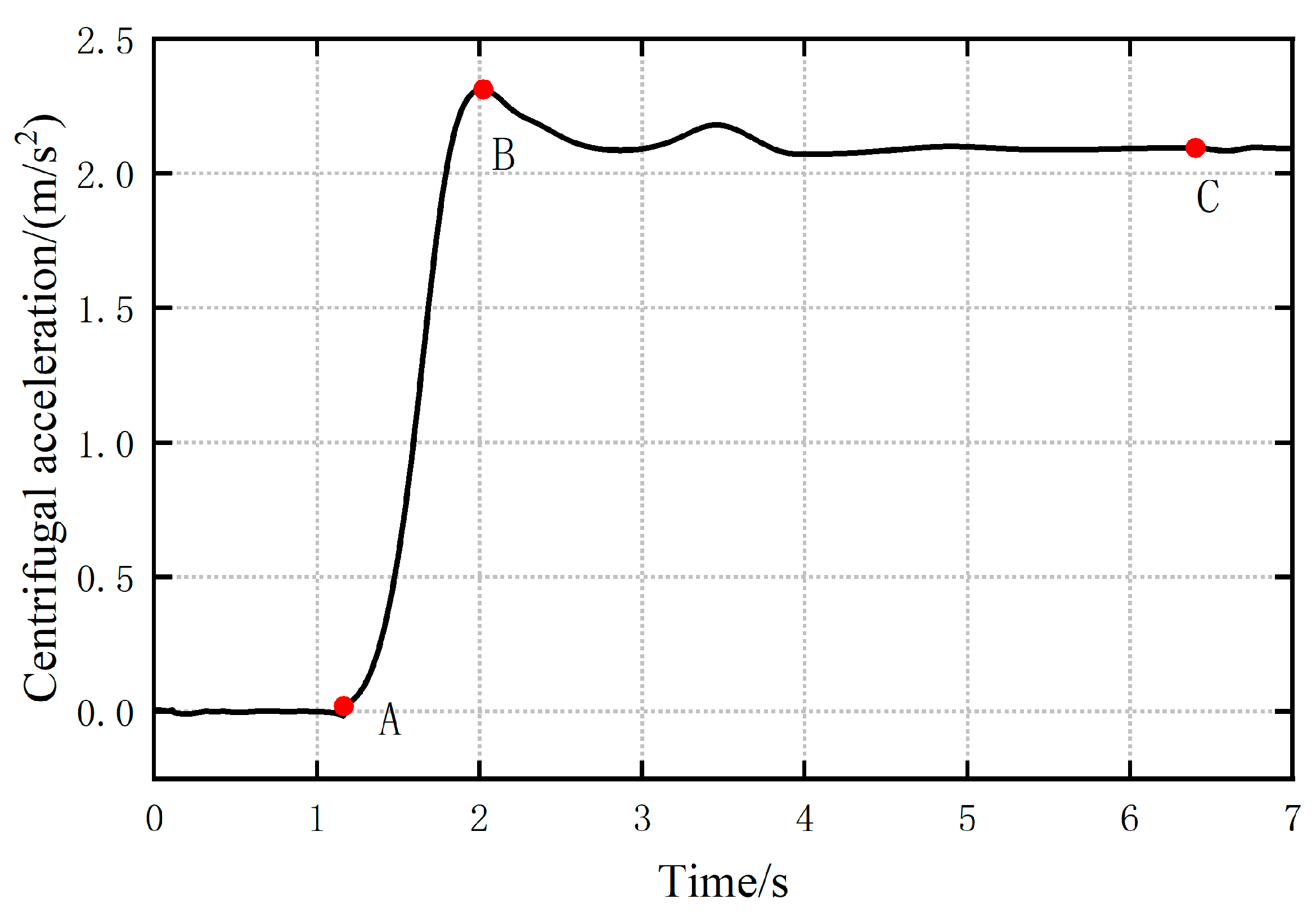
- Centrifugal acceleration
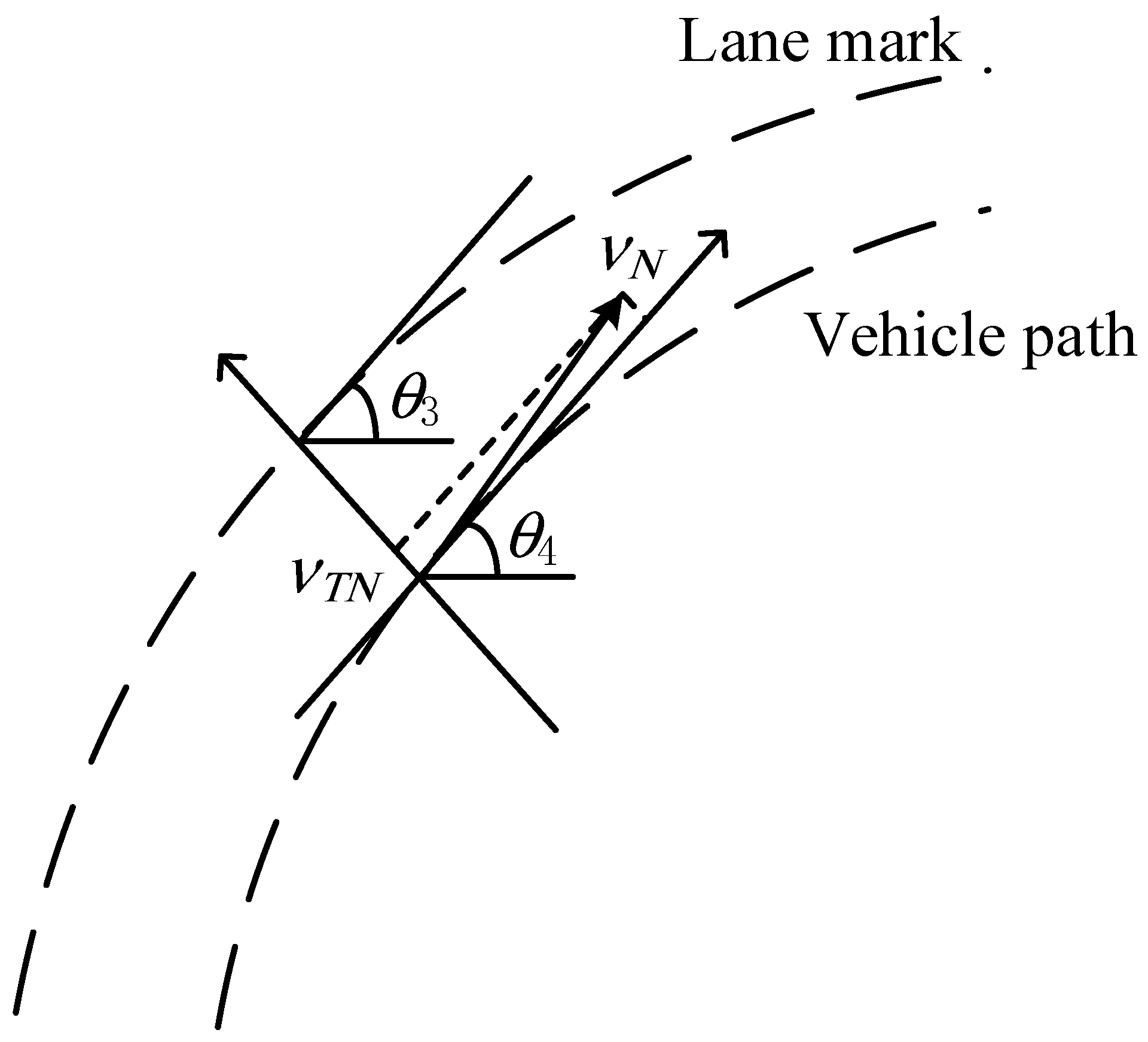
- (2)
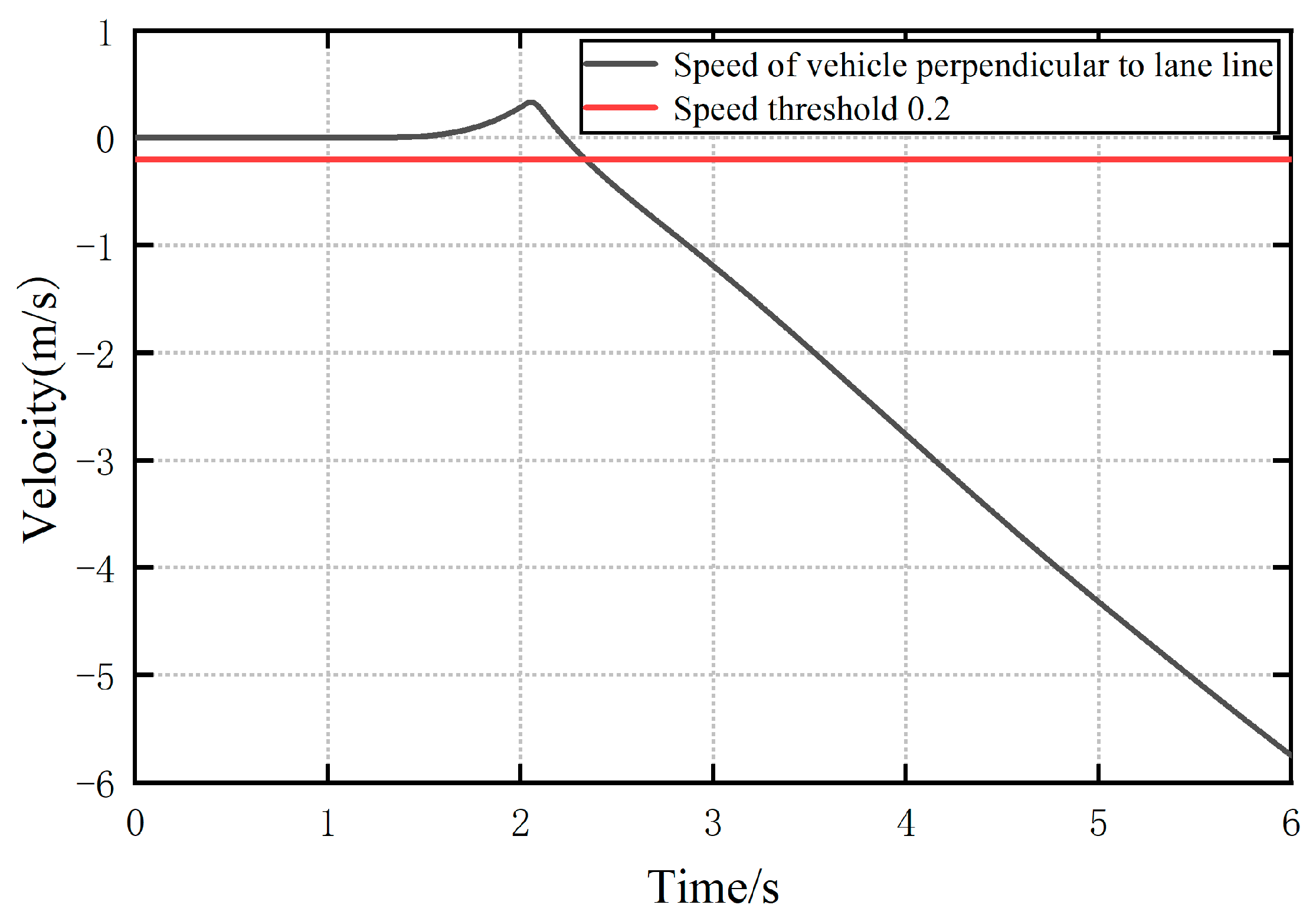
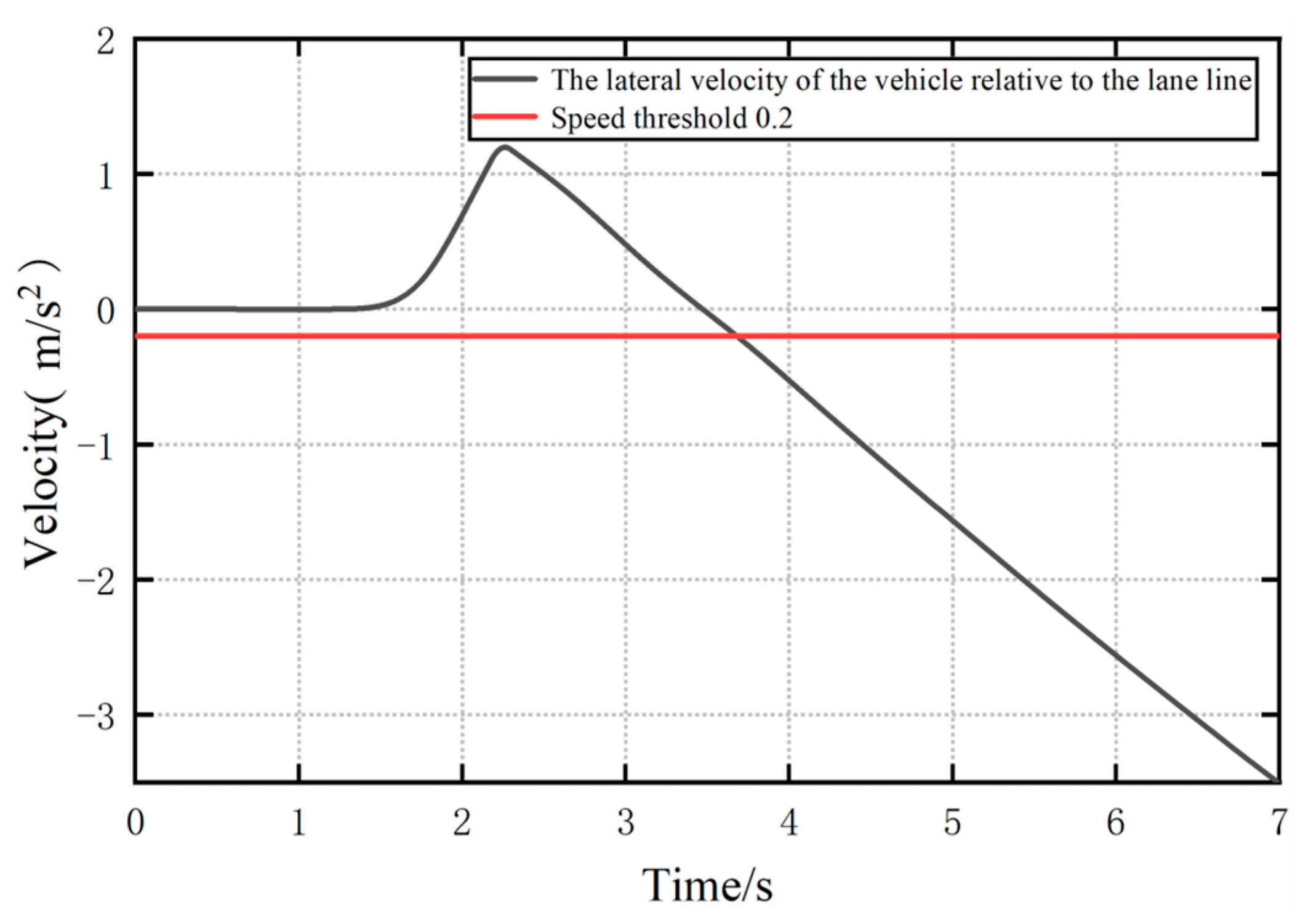
- Lateral speed of the vehicle ahead relative to the lane line
- (3)
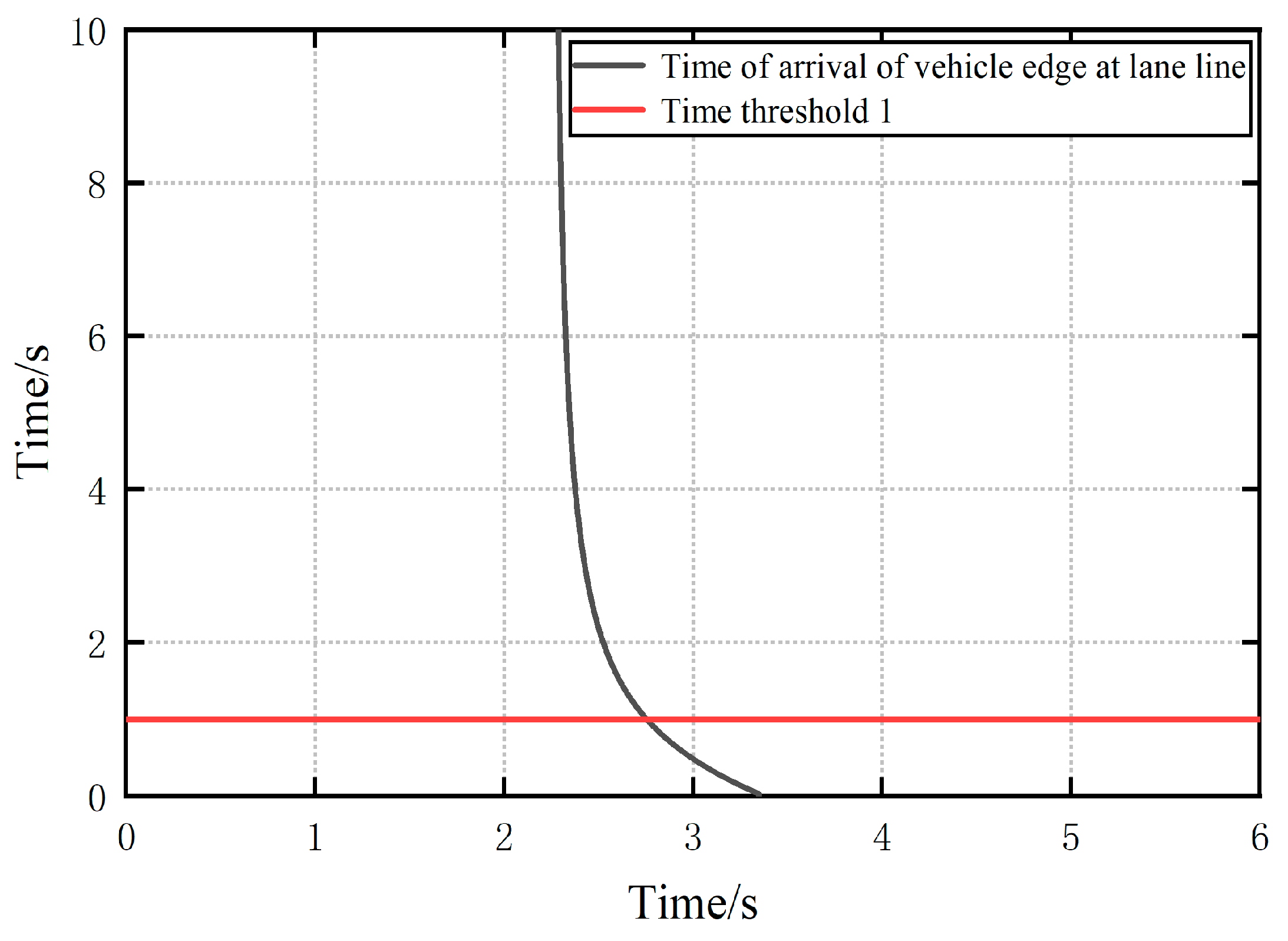
- Time of arrival of the edge of the front vehicle at the lane line
2.3. Strategy for Recognizing the Sideslip State of the Front Vehicle
- (a)
- Calculate the centrifugal acceleration of the vehicle in front of you at the moment of time based on the sensed information.
- (b)
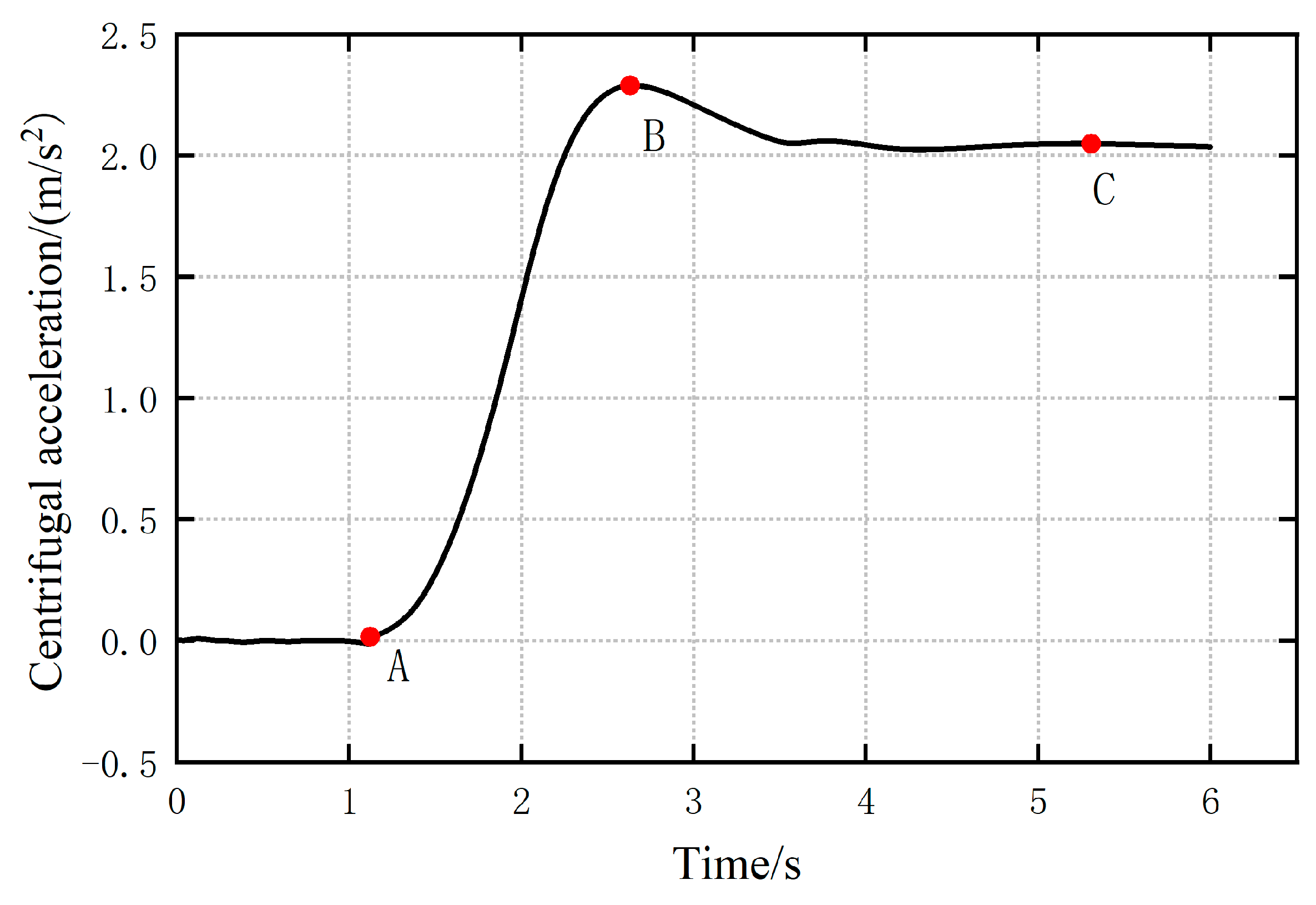
- Compare the historical centrifugal accelerations from the moment to the moment and determine if there is an extreme value. If there is no extreme value, then the moment ; then, go back to step a and continue to calculate the centrifugal acceleration at the next moment. If there is an extreme value in the historical centrifugal acceleration, mark the extreme point as k and proceed to step c.
- (c)
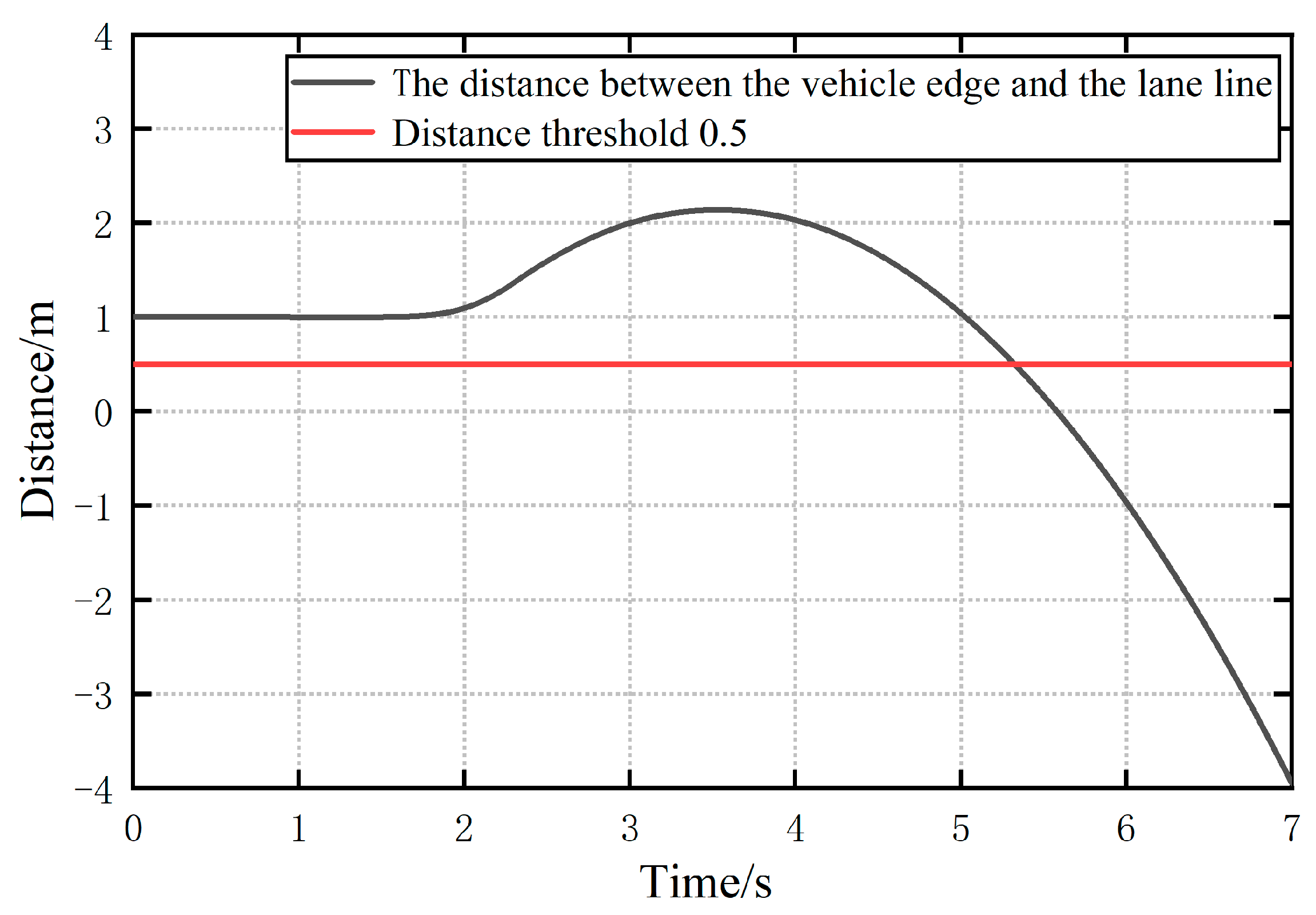
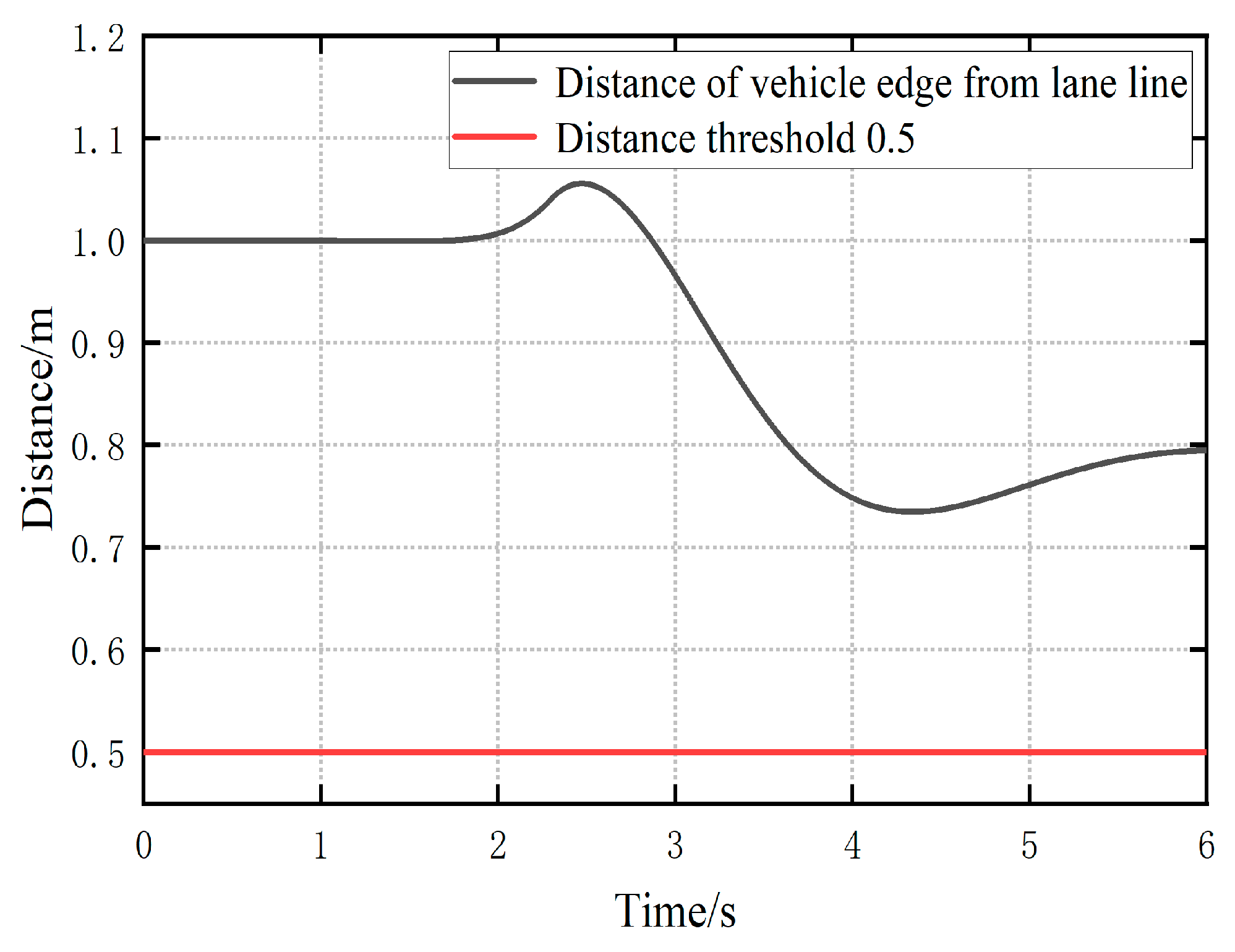
- Analyze the distance between the edge of the front car and the lane line on one side of the car during the period from moment k to moment . If it is gradually decreasing, go to step d; otherwise, go to step f.
- (d)
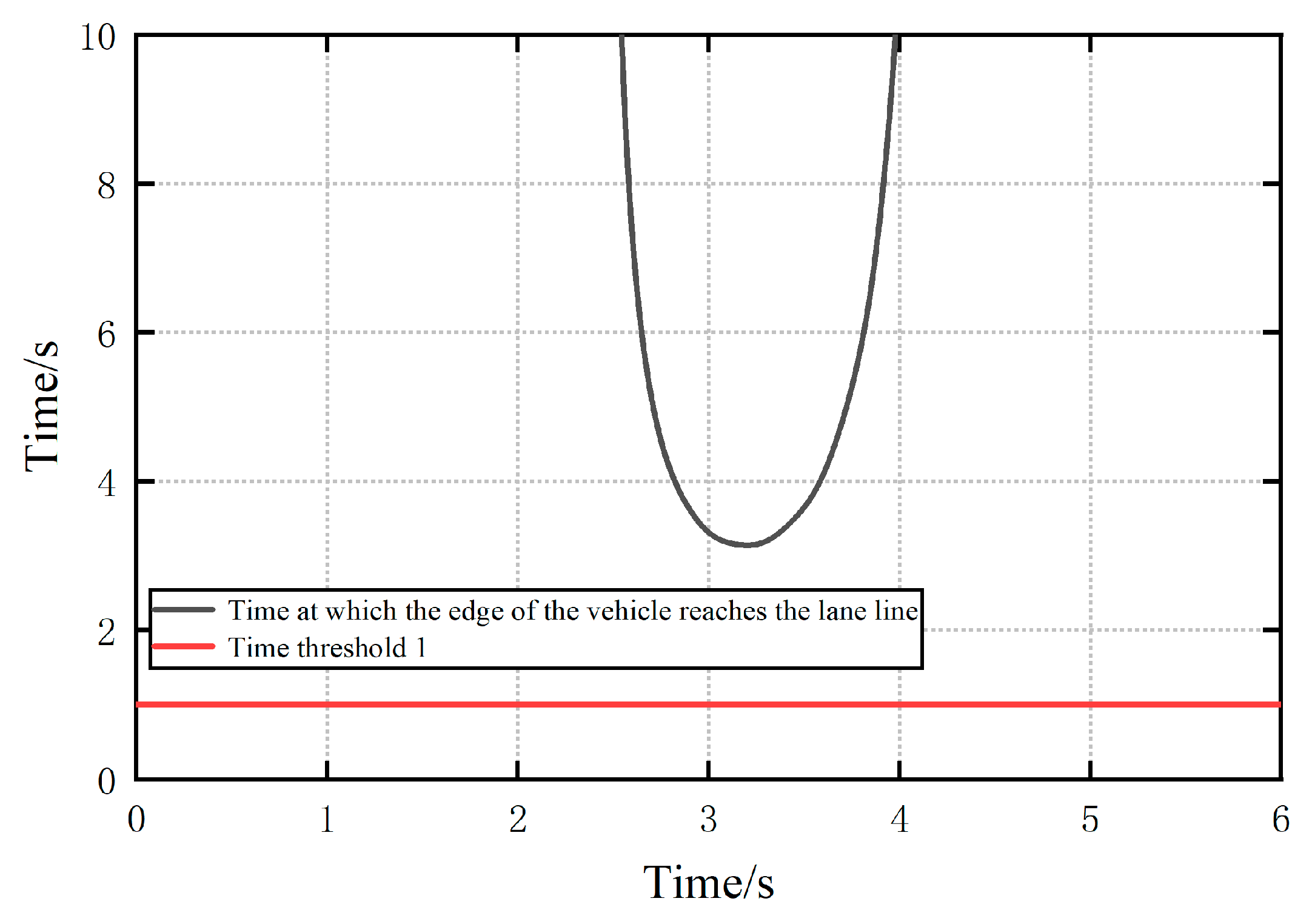
- Calculate three metrics used at time N to characterize whether the vehicle in front will quickly slide out of the lane it is in: the distance between the edge of the vehicle in front and the lane line, the lateral speed relative to the lane line, and the time for the edge to reach the lane line. If one or more of these three metrics do not reach the set threshold, then go to step e; conversely, if all of them reach the set threshold, then go to step i.
- (e)
- Calculate the centrifugal acceleration of the front vehicle at the next moment . If it does not exceed the centrifugal acceleration at the k-moment, go back to step c for further judgment; conversely, at moment , go back to step a and continue to calculate the centrifugal acceleration at the next moment.
- (f)
- Analyze the distance between the edge of the front car and the lane line on the other side of the car during the period from moment k to the next moment. If it is gradually shortened, then go to the next step g; conversely, for moment , go back to step a, and continue to calculate the centrifugal acceleration at the next moment.
- (g)
- As in step d, calculate the three indicators used to characterize whether the vehicle in front will slide out of its lane quickly at the designated time. If one or more of the three indicators do not reach the set threshold, then go to the next step h; conversely, if all of them reach the set threshold, then go to step i.
- (h)
- Calculate the centrifugal acceleration of the front vehicle at the next moment . If it does not exceed the centrifugal acceleration at the k-moment, go back to step f for further judgment; conversely, for the moment , go back to step a and continue to calculate the centrifugal acceleration at the next moment.
- (i)
- This only means that the vehicle in front of you may be skidding, which is further determined by the turn signal information of the vehicle in front of you. If the vehicle in front of you does not have turn signals, it is determined that the vehicle in front of you is skidding dangerously.
3. Sideswipe Vehicle Trajectory Prediction
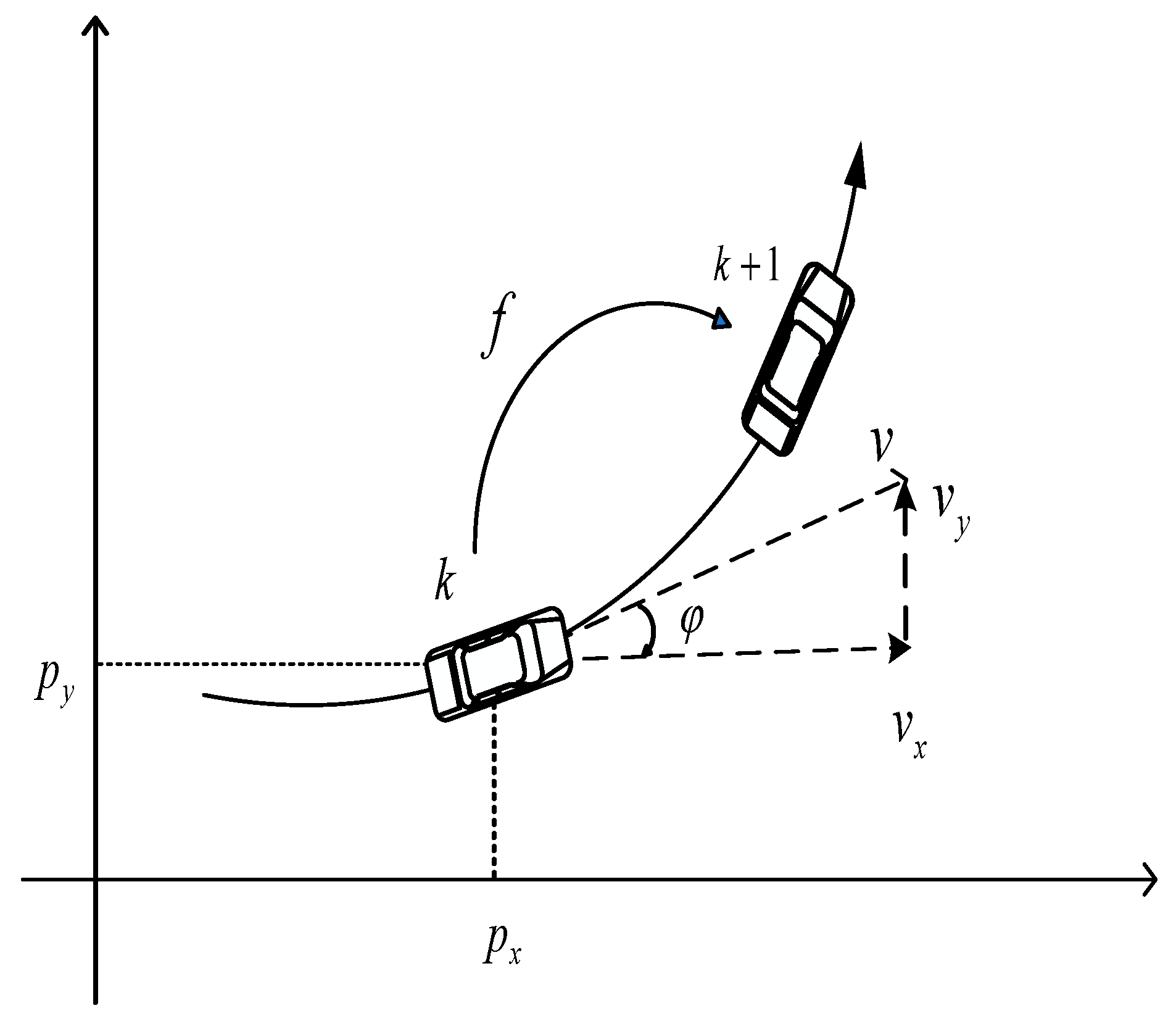
3.1. Constant Rotation and Acceleration Models
3.2. Traceless Kalman Filtering
- (1)
- Generate Sigma points
- (2)
- Obtain new Sigma sample points by nonlinear transformation
- (3)
- Calculate the weighted mean and covariance of the mapped Sigma sample points
3.3. Potential Future Areas for Sideslip Vehicles
4. Results
4.1. Pickup Truck Curve Sideslip Recognition
4.2. Sideslip Recognition of SUV Vehicle on Curve
4.3. Pickup Truck Normal Sideslip Recognition
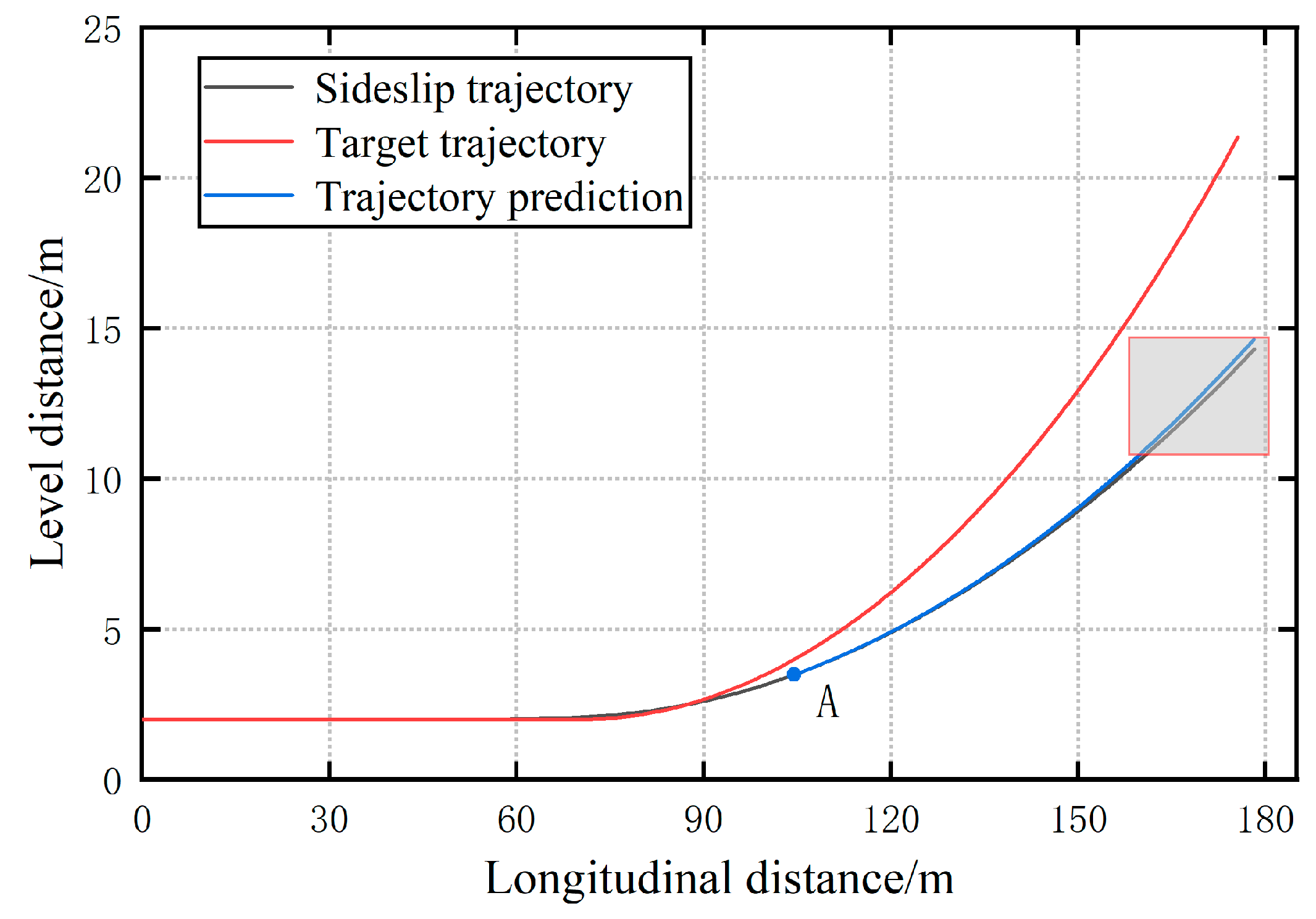
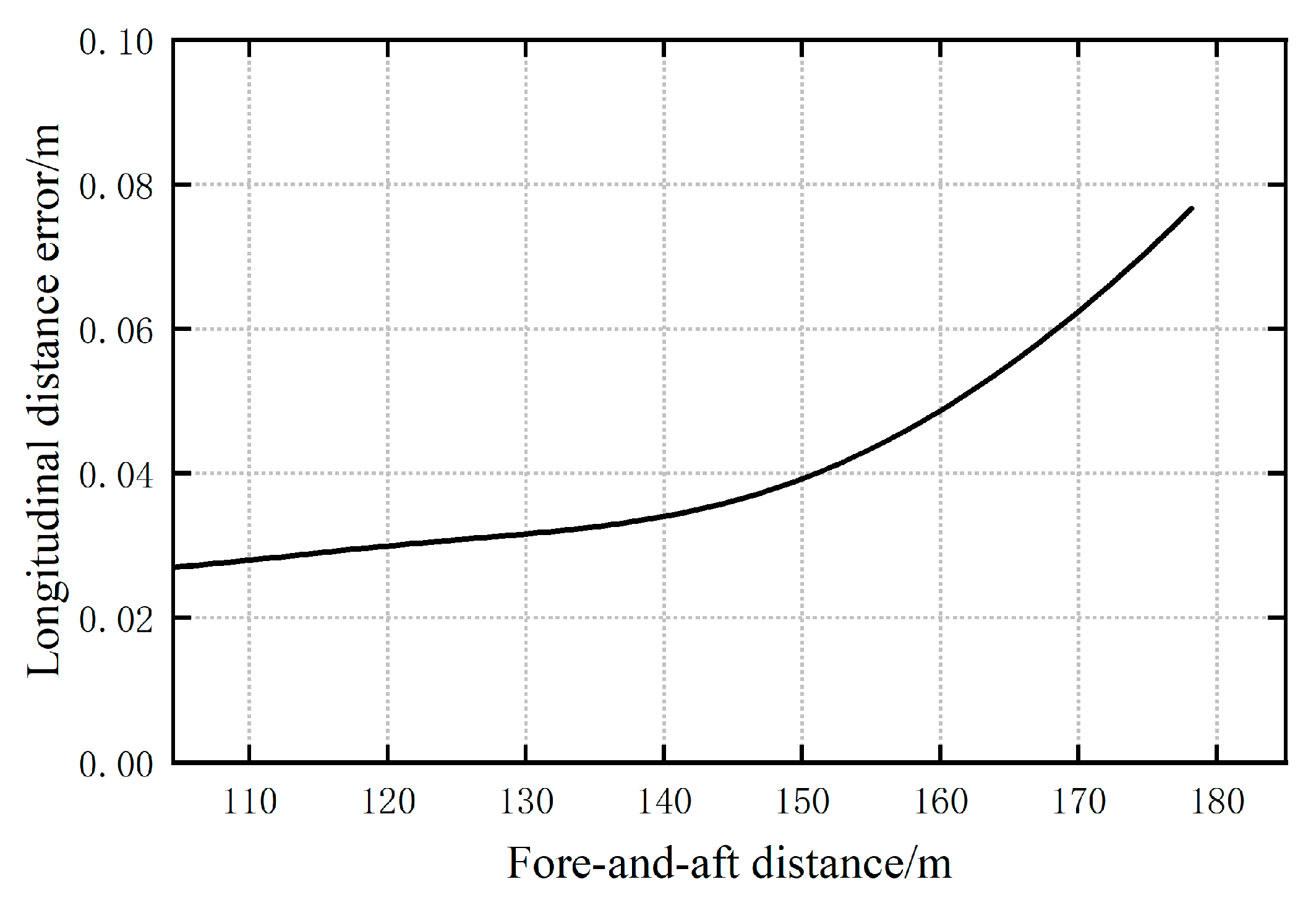
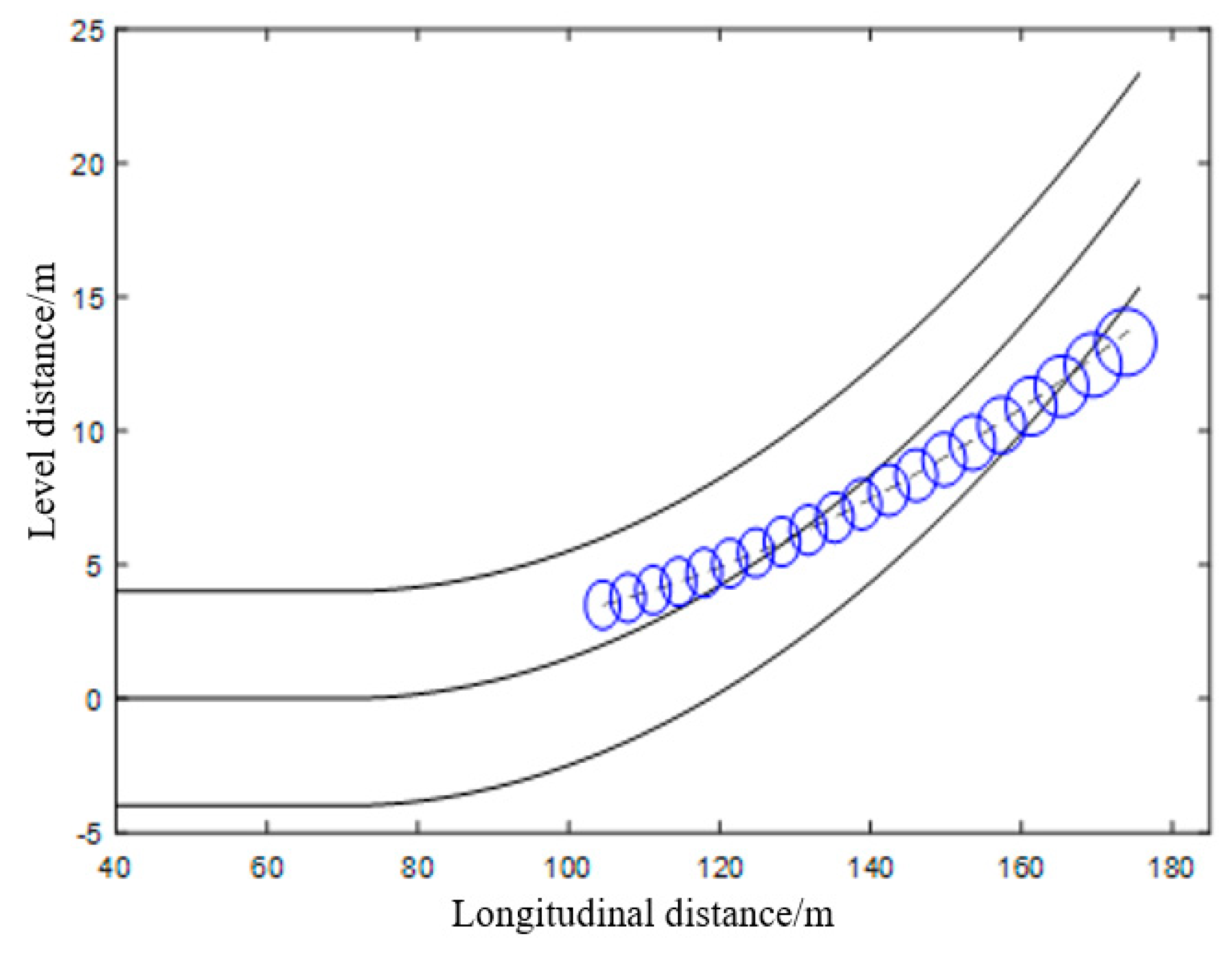
4.4. Pickup Truck Curve Sideslip Trajectory Prediction
4.5. Areas Where Sideslip May Occur for Vehicles
5. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, H.; Yang, M.; Wang, C.; Wang, B. Collision warning system based on front vehicle behavior recognition. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2015, 43 (Suppl. S1), 117–121. [Google Scholar]
- Monot, N.; Moreau, X.; Benine-Neto, A.; Rizzo, A.; Aioun, F. Comparison of rule-based and machine learning methods for lane change detection. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 198–203. [Google Scholar]
- Xiong, S. Analysis of Expressway Merging Behavior and Optimization of Merging Area Organization. Master’s Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Cai, Y.; Tai, K.; Wang, H.; Li, Y.; Chen, L. Research on vehicle behavior recognition algorithm around driverless cars. Automot. Eng. 2020, 42, 1464–1472. [Google Scholar]
- Zhu, L.; Liu, L.; Zhao, X.; Yang, D. Research on vehicle driving behavior recognition based on support vector machine. Transp. Syst. Eng. Inf. 2017, 17, 91–97. [Google Scholar]
- Chung, S.; Lee, H. Vehicle sideslip estimation and compensation for banked road. Int. J. Automot. Technol. 2016, 17, 63–69. [Google Scholar] [CrossRef]
- Ma, B.; Liu, Y.; Gao, Y.; Yang, Y.; Ji, X.; Bo, Y. Estimation of vehicle sideslip angle based on steering torque. Int. J. Adv. Manuf. Technol. 2023, 94, 3229–3237. [Google Scholar] [CrossRef]
- Lai, E.-M.; Luo, Y.-T. Automobile center of mass side estimation based on multi-information fusion. Sci. Technol. Eng. 2024, 13, 1889–1894. [Google Scholar]
- Shirazi, M.S.; Morris, B.T. Looking at intersections: A survey of intersection monitoring, behavior and safety analysis of recent studies. IEEE Trans. Intell. Transp. Syst. 2021, 18, 4–24. [Google Scholar] [CrossRef]
- Mozaffari, S.; Al-Jarrah, O.Y.; Dianati, M.; Jennings, P.; Mouzakitis, A. Deep learning-based vehicle behavior prediction for autonomous driving applications: A review. IEEE Trans. Intell. Transp. Syst. 2020, 23, 33–47. [Google Scholar] [CrossRef]
- Zhang, R.; Cao, L.; Bao, S.; Tan, J. A method for connected vehicle trajectory prediction and collision warning algorithm based on V2V communication. Int. J. Crashworthiness 2017, 22, 15–25. [Google Scholar] [CrossRef]
- Lefkopoulos, V.; Menner, M.; Domahidi, A.; Zeilinger, M.N. Interaction-aware prediction for autonomous driving: A multiple model kalman filtering scheme. IEEE Robot. Autom. Lett. 2020, 6, 80–87. [Google Scholar] [CrossRef]
- Okamoto, K.; Berntorp, K.; Di Cairano, S. Driverintention-based vehicle threat assessment using random forests and particle filtering. IFAC-PapersOnLine 2017, 50, 13860–13865. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Zuo, Z.; Li, Z.; Wang, L.; Luo, X. Trajectory planning and safety assessment of autonomous vehicles based on motion prediction and model predictive control. IEEE Trans. Veh. Technol. 2019, 68, 8546–8556. [Google Scholar] [CrossRef]
- Xiang, Y.; He, Y.; Luo, Y.; Bu, D.; Kong, W.; Chen, J. Recognition model of sideslip of surrounding vehicles based on perception information of driverless vehicle. IEEE Intell. Syst. 2022, 37, 79–91. [Google Scholar] [CrossRef]
- Wang, P.-C. Research on Dynamic Vehicle Trajectory Prediction Method in Lanes. Master’s Thesis, Chang’an University, Xi’an China, 2021. [Google Scholar]
- Xiang, Y. Highway Forward Vehicle Instability Identification and Emergency Collision Avoidance Decision Planning Method. Ph.D. Thesis, Chongqing University, Chongqing, China, 2023. [Google Scholar]
- Wang, Y.; Wang, C.; Zhao, W.; Xu, C. Decision-Making and planning method for autonomous vehicles based on motivation and risk assessment. IEEE Trans. Veh. Technol. 2021, 70, 107–120. [Google Scholar] [CrossRef]
- Qu, W. Research on Driving Behavior Recognition and Trajectory Prediction Method for Traffic Vehicles. Master’s Thesis, Jilin University, Changchun, China, 2021. [Google Scholar]
- Althoff, M.; Mergel, A. Comparison of Markov chain abstraction and Monte Carlo simulation for the safety assessment of autonomous cars. IEEE Trans. Intell. Transp. Syst. 2020, 12, 1237–1247. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ou, J.; Cheng, X.; Zhang, P. Research on Trajectory Prediction Based on Front Vehicle Sideslip Recognition. World Electr. Veh. J. 2025, 16, 241. https://doi.org/10.3390/wevj16040241
Ou J, Cheng X, Zhang P. Research on Trajectory Prediction Based on Front Vehicle Sideslip Recognition. World Electric Vehicle Journal. 2025; 16(4):241. https://doi.org/10.3390/wevj16040241
Chicago/Turabian StyleOu, Jian, Xiaolong Cheng, and Pengju Zhang. 2025. "Research on Trajectory Prediction Based on Front Vehicle Sideslip Recognition" World Electric Vehicle Journal 16, no. 4: 241. https://doi.org/10.3390/wevj16040241
APA StyleOu, J., Cheng, X., & Zhang, P. (2025). Research on Trajectory Prediction Based on Front Vehicle Sideslip Recognition. World Electric Vehicle Journal, 16(4), 241. https://doi.org/10.3390/wevj16040241