Energy-Saving of Battery Electric Vehicle Powertrain and Efficiency Improvement during Different Standard Driving Cycles




Abstract
:1. Introduction
- Exploiting the concept of improving membership functionality and FLC rules by simply training ANFIS with real driving cycle data gathered from the MATLAB/SIMULINK program.
- The procedure for FLC console blocks is recast with enhanced membership functions by ANFIS training. After that, the proposed FLC controller is very suitable for dealing with non-linear problems, thanks to its strength and adaptability.
- As a result, the new control unit not only improves the reliability of the vehicle’s control system but also the energy management strategy achieves a promising performance for energy saving.
- The effectiveness of the proposed FLC in comparison to conventional control (PI) is demonstrated by high-fidelity CarSim/MATLAB experiments under dynamic response conditions where the improved FLC demonstrates better energy savings.
- Furthermore, the proposed PMU controller could lead to the following new contributions:
- Ensure that battery power is optimal for operating the vehicle.
- Ensure that the risk of battery damage is minimal and protect battery cells from abuse and damage.
- Control the charging and discharging of the battery and ensure that the battery is always ready for use.
- Extend battery life for as long as possible.
2. Vehicle Modeling
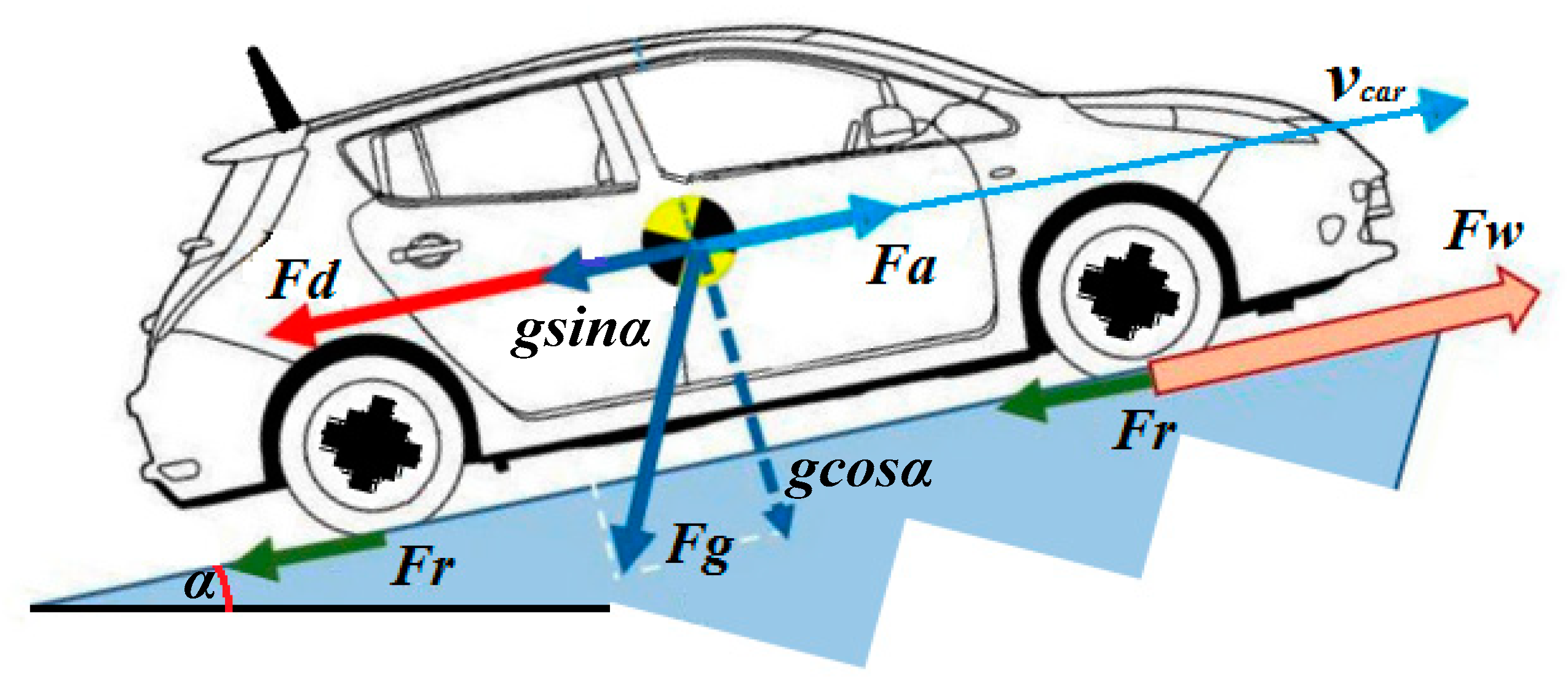
2.1. The Force Model
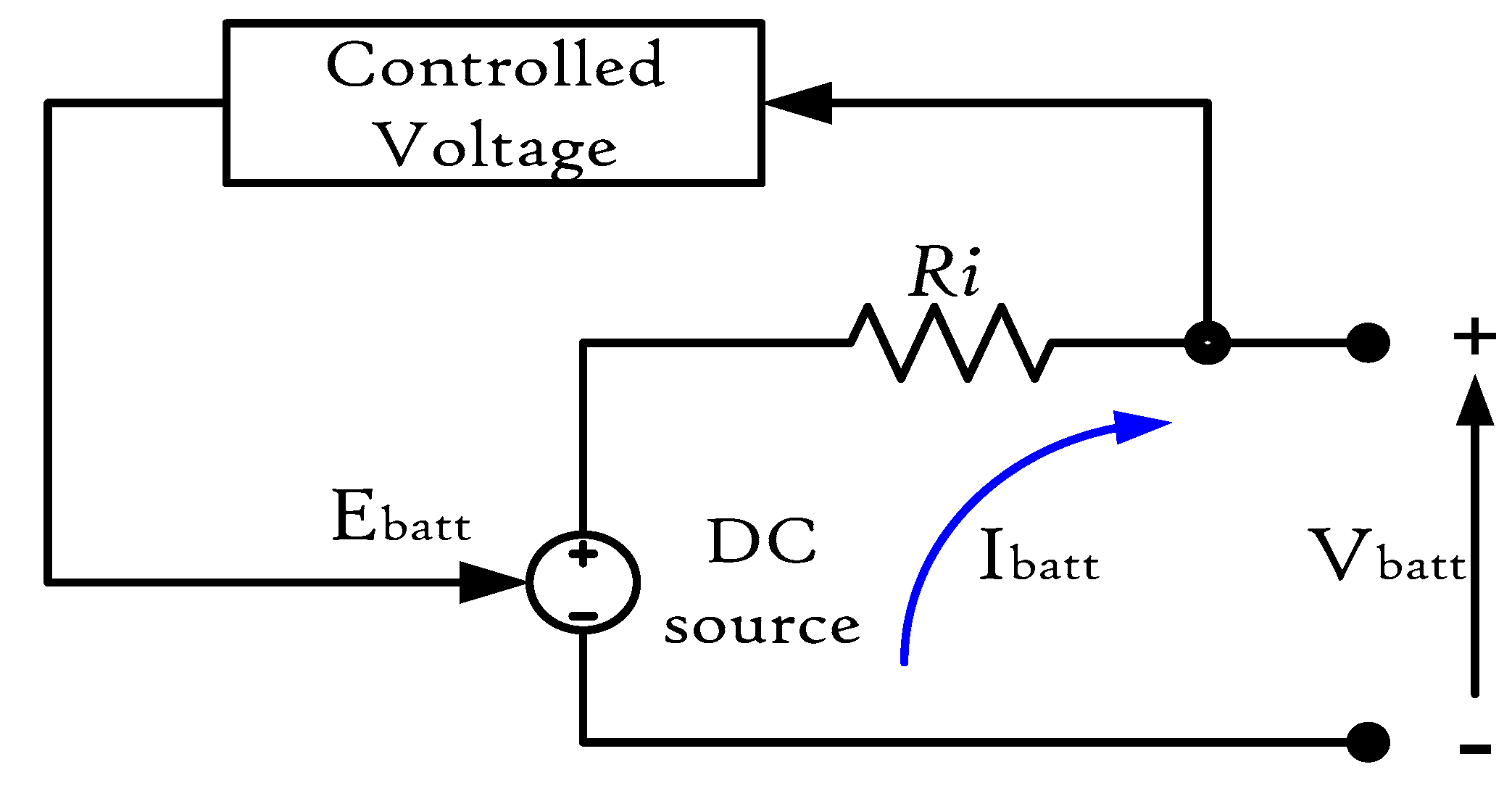
2.2. The Battery Model
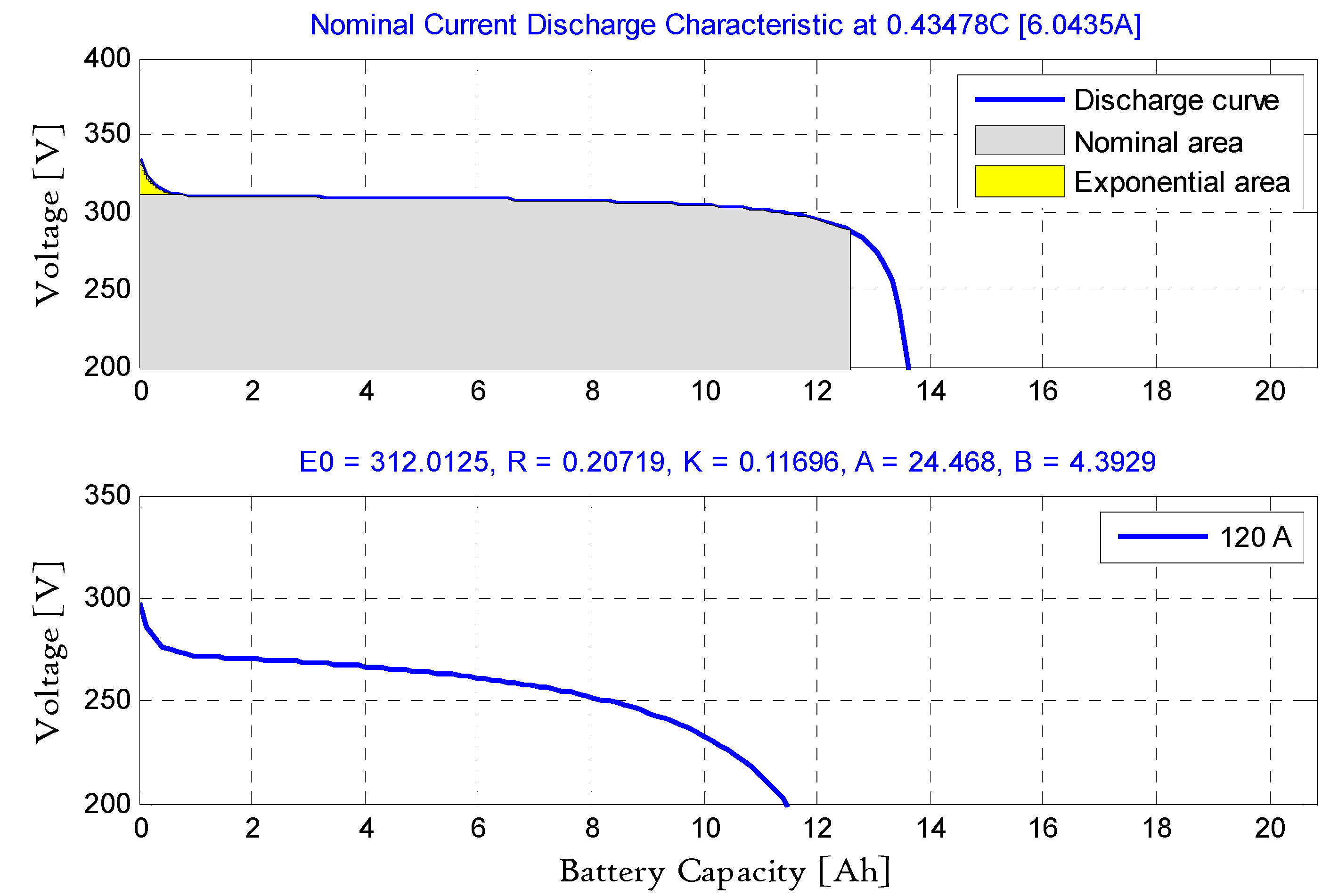
2.3. Extracting Model Parameters
- Charging phase:
- Discharging phase:
2.4. Sizing Battery Pack
2.4.1. Battery Pack Power
2.4.2. Specific Battery Energy (SEbatt)
2.4.3. Battery Specific Power (SPbatt)
2.4.4. Battery Pack Capacity
2.4.5. Maximum Battery Pack Storage
2.4.6. Efficient Battery Power
2.4.7. Battery Cell Numbers
2.5. Monitoring and Estimating the Battery SOC
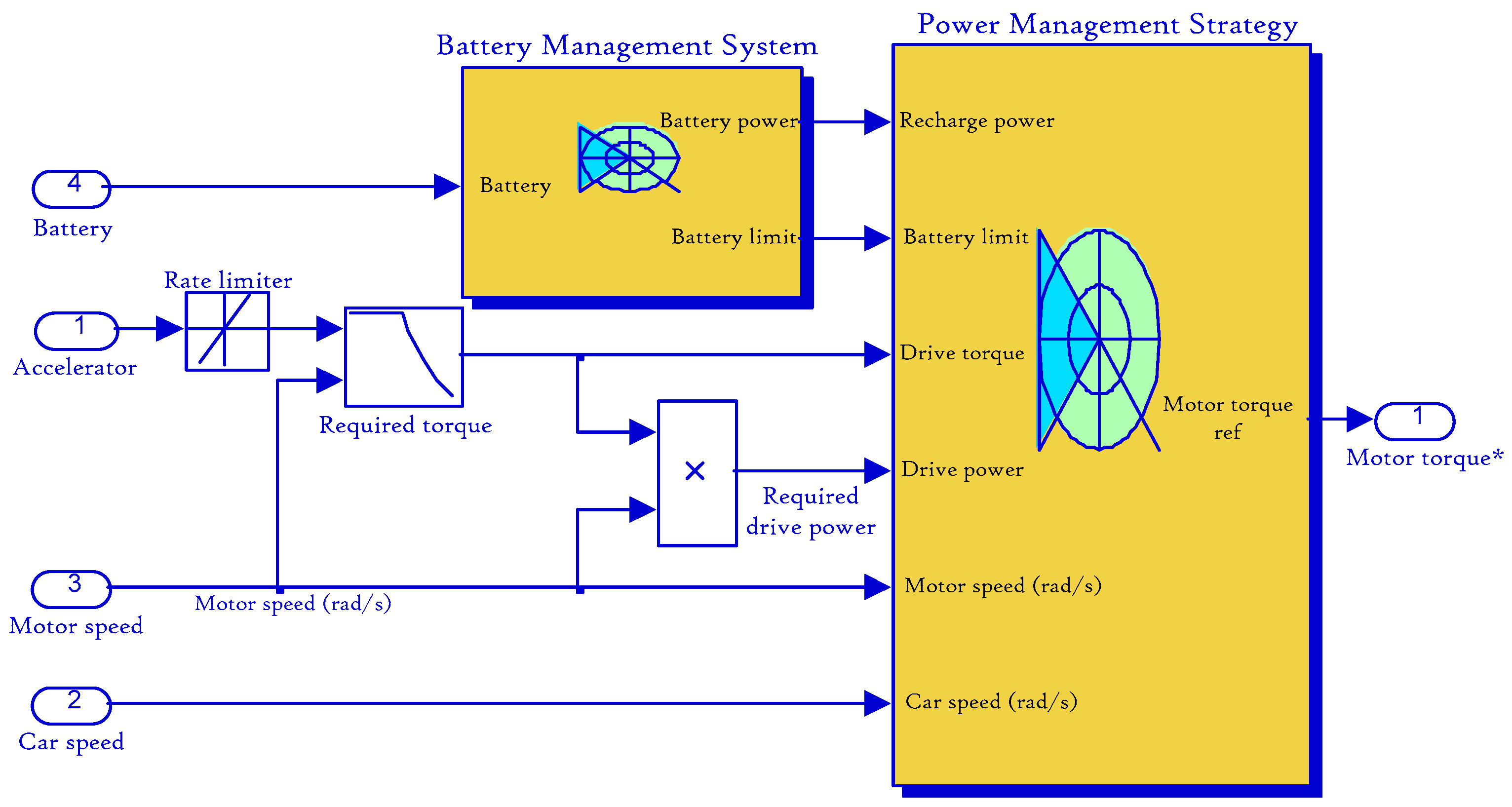
3. Energy Management Strategy
3.1. Battery Management System
- 1.
- Fully protect the battery from damage.
- 2.
- Monitor cells, units, and packages to ensure that they operate within the appropriate range and avoid faulty operation such as short circuits, overvoltage, overcharging, over-discharging, and overheating of particular importance to Li-ion cells.
- 3.
- Ensure safe operation and extend battery life for as long as possible.
- 4.
- Communicate with the supervisor of the vehicle and meet all the requirements for operating the vehicle.
- 5.
- Balance cell groups during dynamic charging and discharging to ensure that the entire battery system provides optimum performance.
3.2. Power Control Unit Suggested
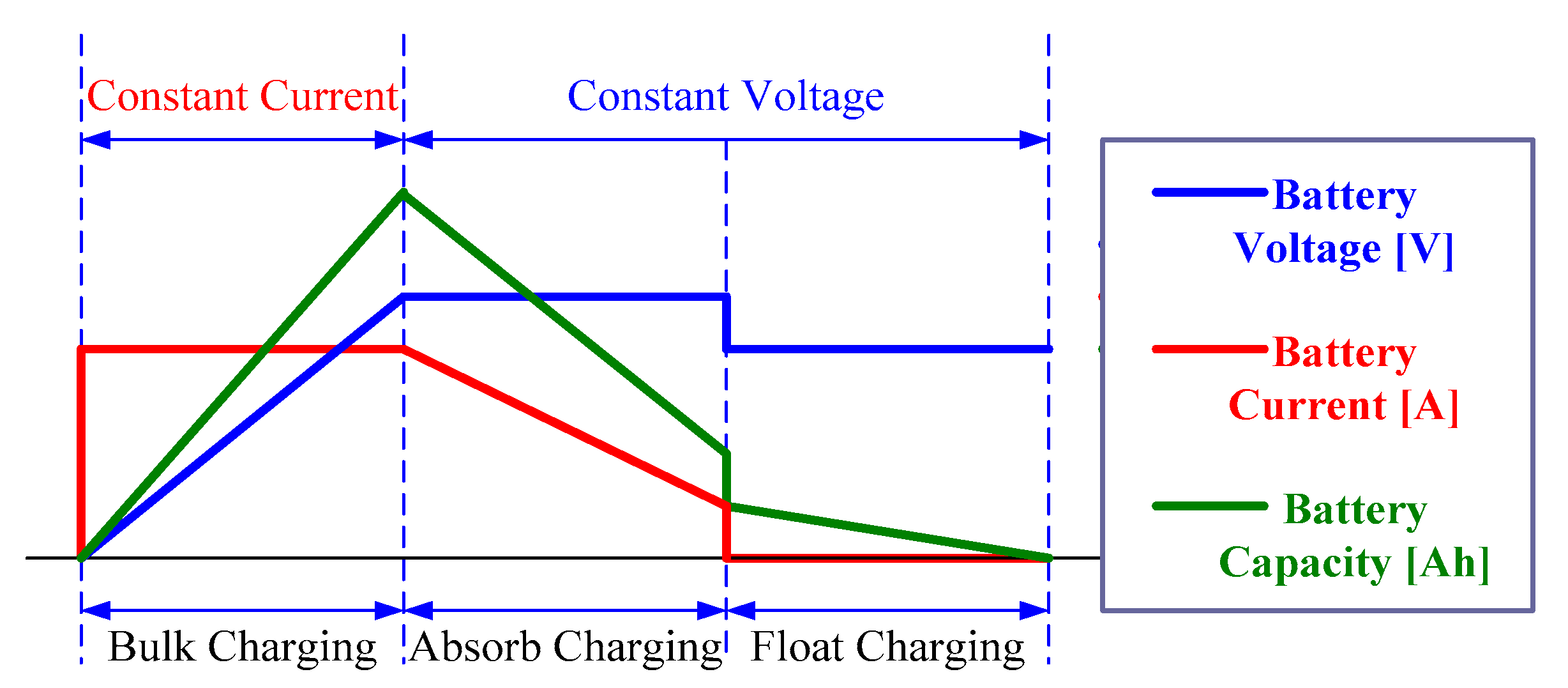
- (1)
- Bulk charging mode or CC charge (current control)—used for fast charging when the SOC is low, where the charger current is kept at a steady rate, and the battery voltage is enabled to grow accordingly during recharging.
- (2)
- Absorption charging mode or CV charge (voltage control)—used to prevent battery overcharging when the SOC is higher than a certain level.
- (3)
- Float charging mode (voltage control)—used when the battery is close to full charge and maintains the full charge state of the battery.
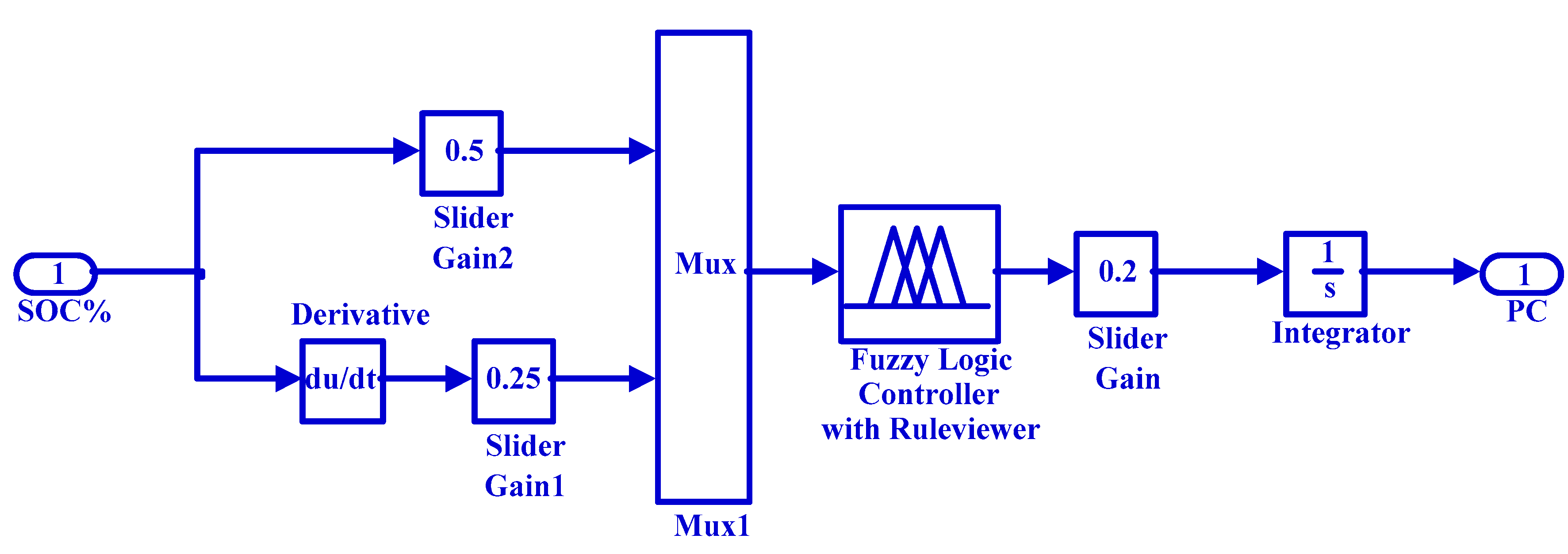
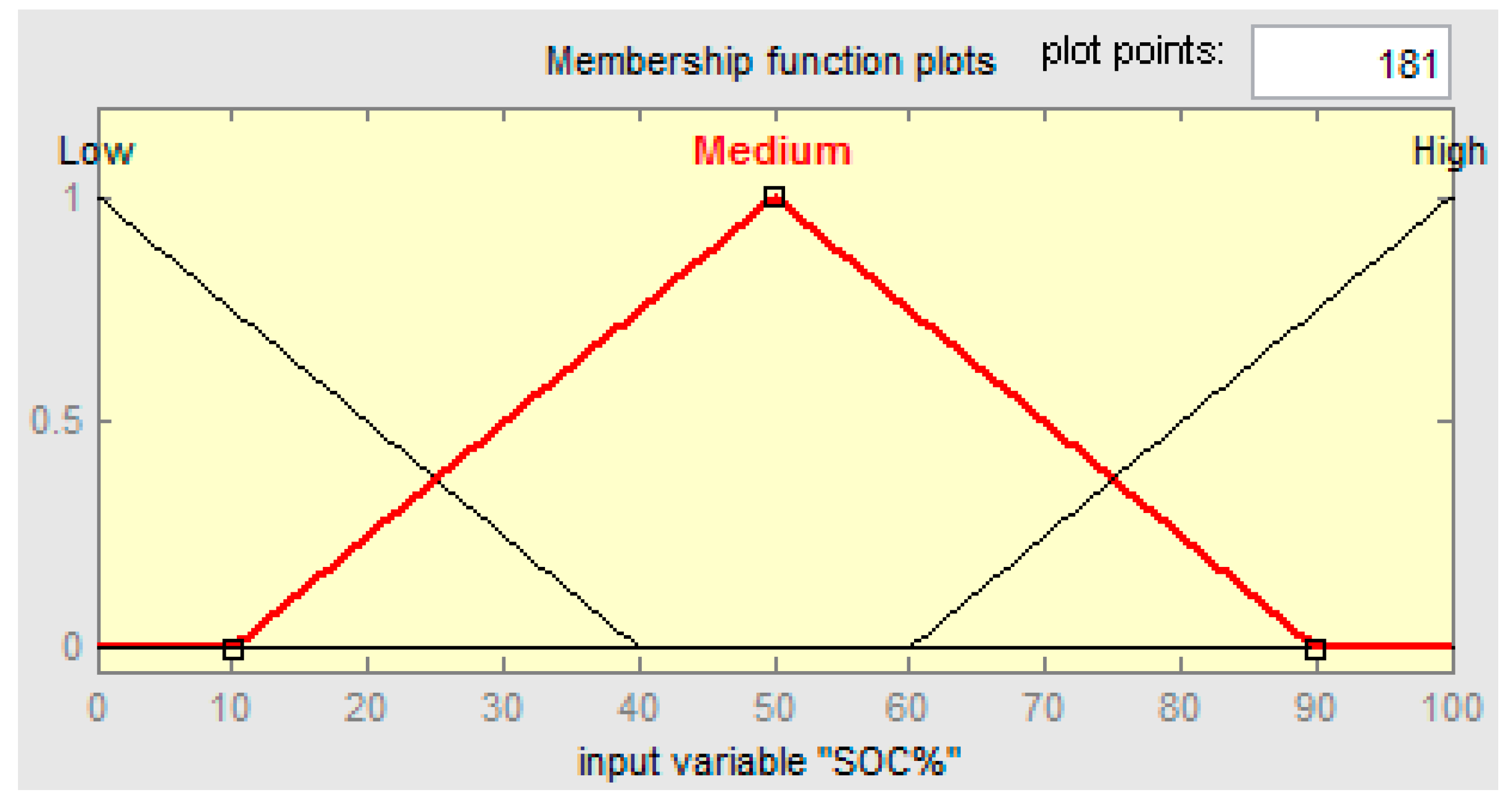
3.3. Suggested Fuzzy Logic Controller
3.4. Adaptive Neural Fuzzy Inference System
- (1)
- Obtaining training data of different driving cycles, each driving cycle is characterized by different road modes, and partial samples of NEDC and UDDS driving cycles are selected in the simulation of ANFIS training to achieve the improved FLC. In simulations, points 0–100, 500–600, 1000–1100 of the different driving cycles are determined as samples.
- (2)
- Use the data to train ANFIS.
- (3)
- Get new membership functions.
- (4)
- Obtaining the new FLC block in the MATLAB.
- (5)
- Obtain simulation results.
- Rule 1:IFx1isAiANDx2isBiTHENYi = Ψi (x1, x2)
- Rule 2:IFx2isAiANDx2isBiTHENYi = Ψi (x1, x2)
4. Results and Discussion
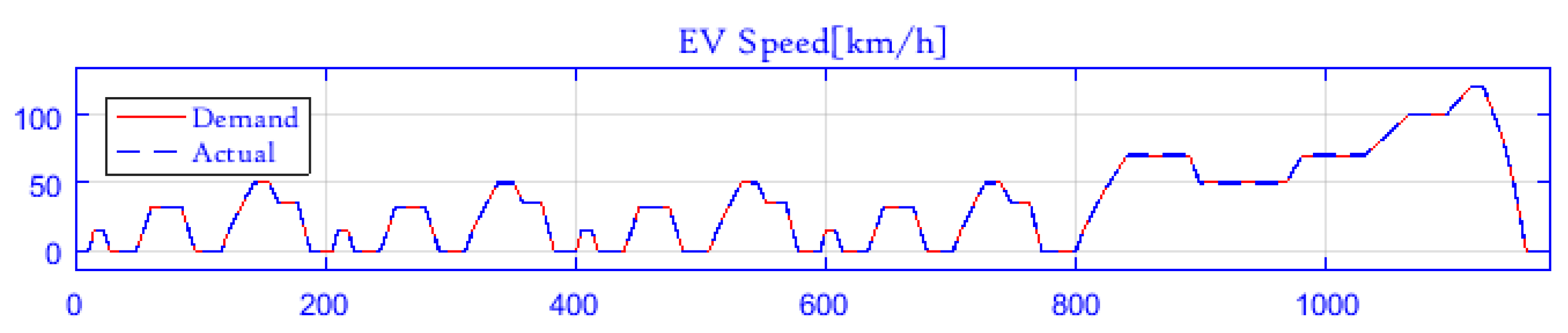
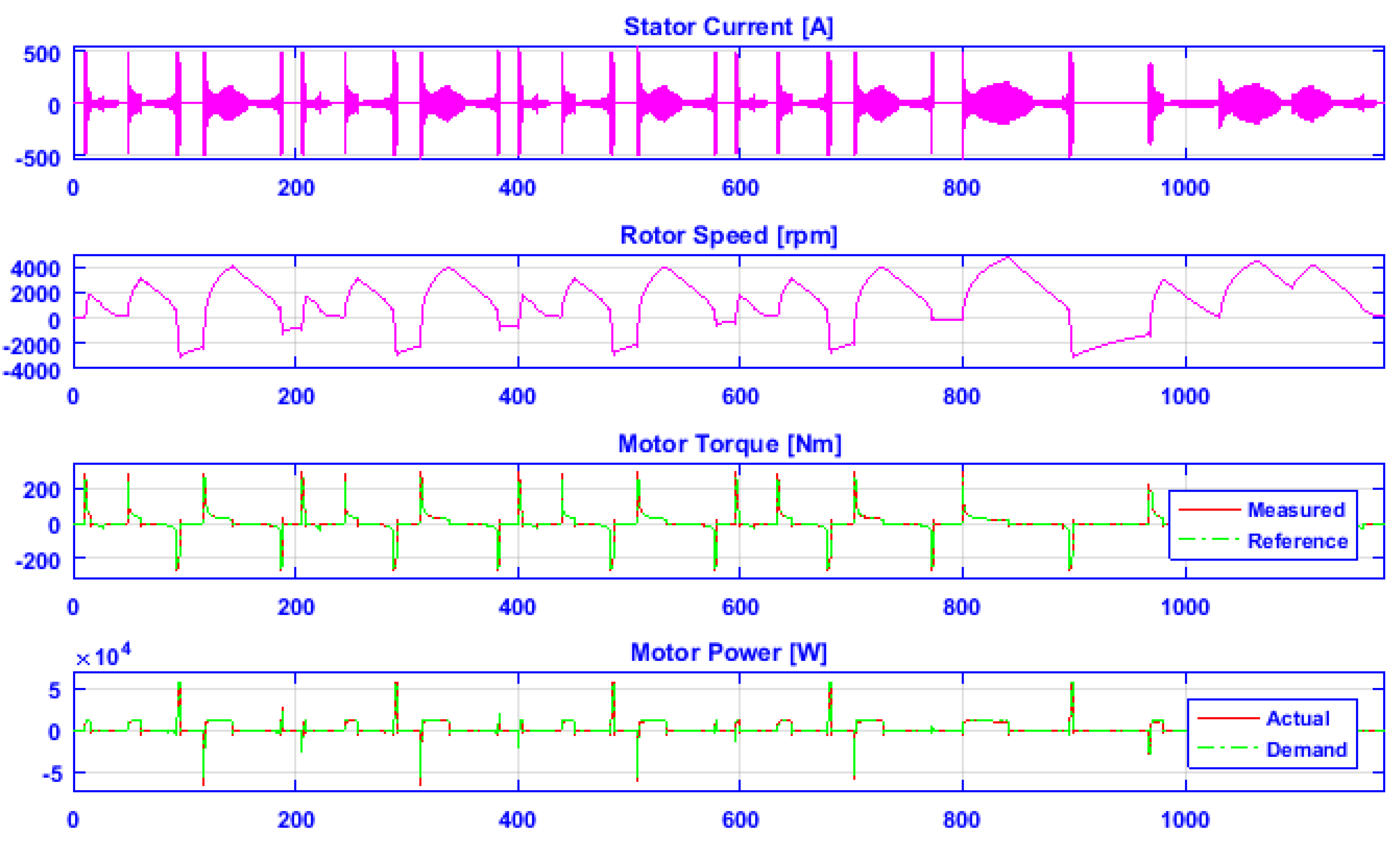
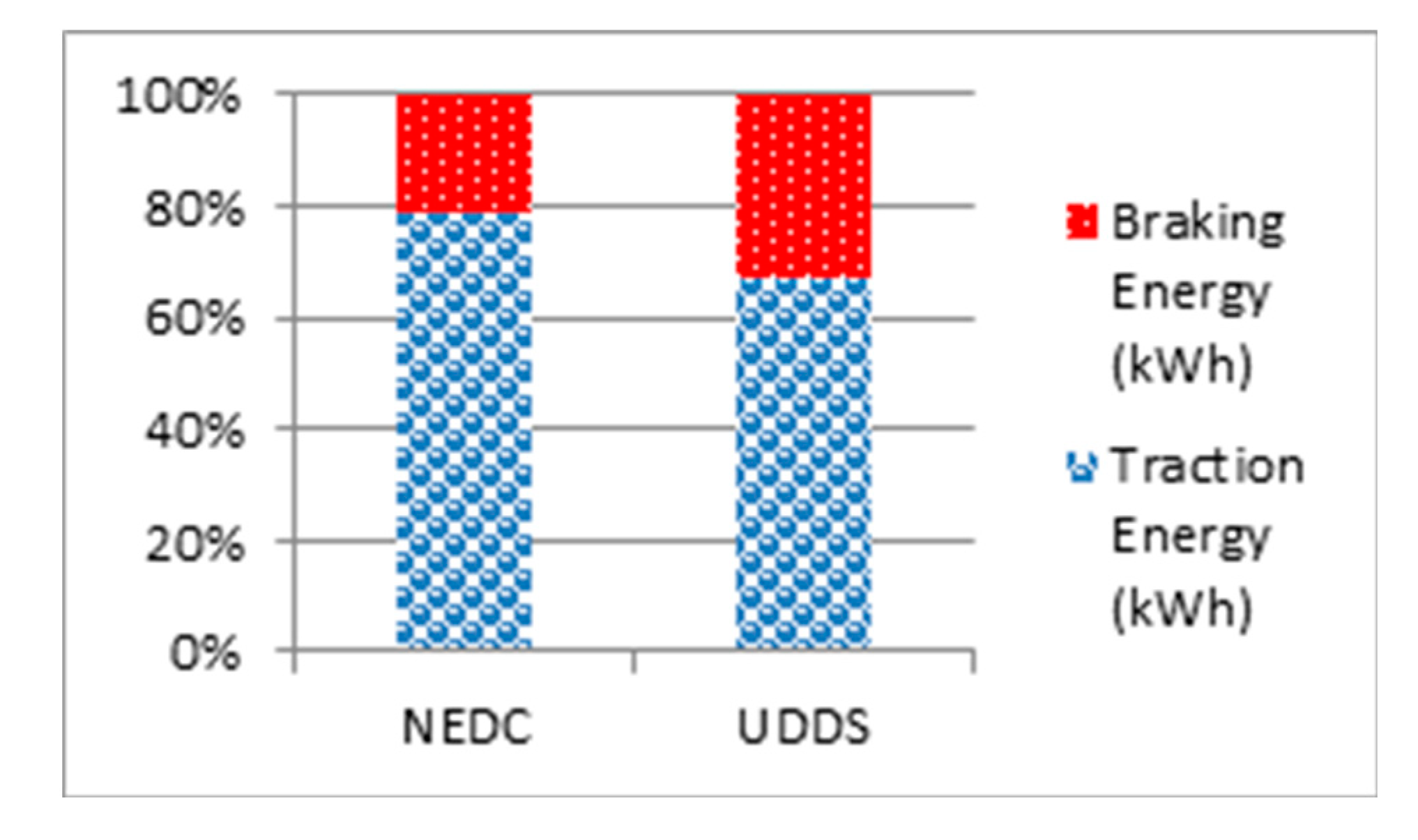
4.1. Description of Driving Cycle NEDC
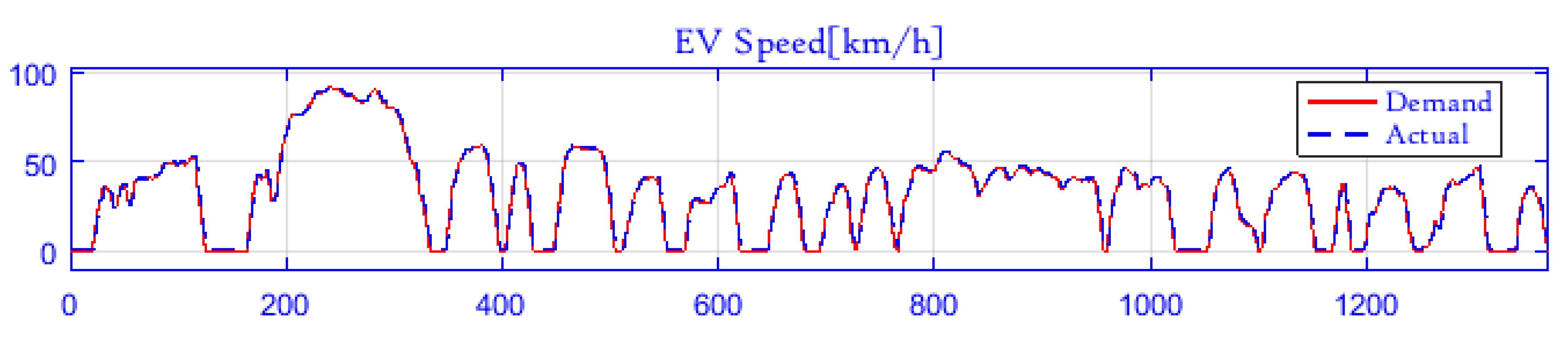
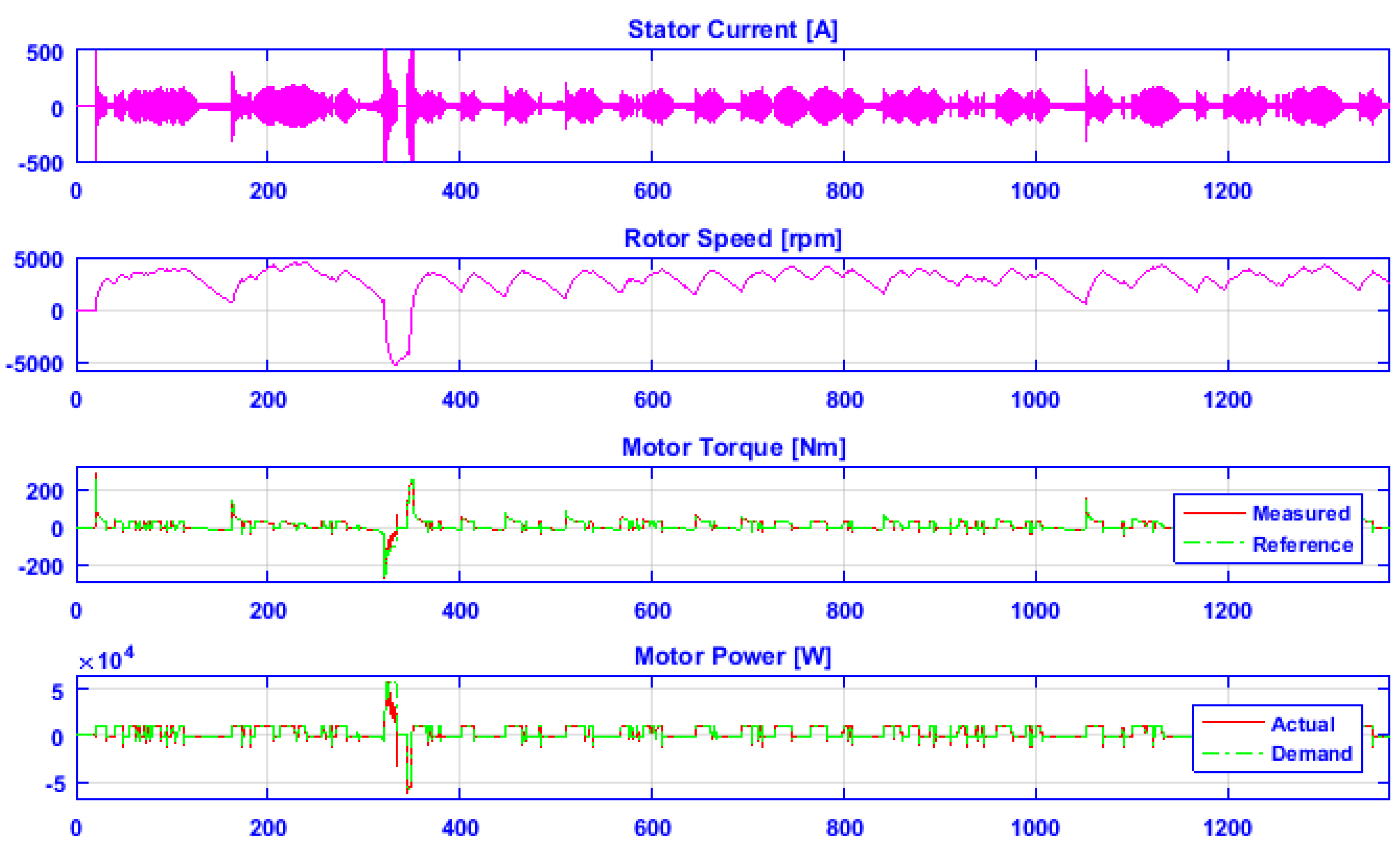
4.2. Description of Driving Cycle UDDS
5. Conclusions
- 1.
- Simulation results showed better performance of the proposed adaptive FLC over conventional PI control.
- 2.
- Adaptive FLC introduced an effective solution to correctly EMS.
- 3.
- Using adaptive FLC, much better results can be achieved due to lower harmonic current and thus torque ripple less than conventional PI.
- 4.
- Several tests were performed using simulations to analyze harmonic components for speed. All THD values are less than 5%, which is acceptable harmonic distortion according to the IEEE standard.
- 5.
- Finally, adaptive FLC offers very good speed control performance.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| ANFIS | Adaptive Neural Fuzzy Inference System |
| BESSs | Battery Energy Storage Systems |
| BEVs | Battery Electric Vehicles |
| BMS | Battery Management System |
| CC | Constant Current |
| CEVs | Combustion Engine Vehicles |
| CV | Constant Voltage |
| DC | Direct Current |
| DG | Distributed Generation |
| DOD | Depth of Discharge |
| ECE-15 | European Standard Urban Driving Cycles |
| EGV | Electric Ground Vehicle |
| EMS | Energy Management Structure |
| EUDC | Extra-Urban Driving Cycle |
| EV | Electric Vehicle |
| FLC | Fuzzy Logic Controller |
| HEVs | Hybrid Electric Vehicles |
| ICE | Internal Combustion Engine |
| IGBTs | Insulated Gate Bipolar Transistors |
| Li-ion | Lithium-Ion |
| LPV | Linear Parameter Variable |
| LQR | Linear Quadratic Regulator |
| MGs | Micro-Grids |
| NEDC | New European Driving Cycle |
| PHEVs | Plug-in Hybrid Electric Vehicles |
| PI | Proportional Integral |
| PID | Proportional Integral Derivative |
| PMS | Power Management Strategy |
| PMSM | Permanent Magnet Synchronous Motors |
| PMU | Power Management Unit |
| PSO | Particle Swarm Optimization |
| RERs | Renewable Energy Resources |
| SOC | State of Charge |
| SOD | State of Discharge |
| SOH | State of Health |
| THD | Total Harmonic Distortion |
| UDDS | Urban Dynamometer Driving Schedule |
| UUG | Upstream Utility Grid |
| List of Notations | |
| Symbol | Description |
| a | Acceleration (m/s2) |
| A | The cross-sectional area of the vehicle (m2) |
| Bpk | The peak flux density in the B-H hysteresis curve |
| Cd | Aerodynamic drag coefficient |
| d,q | Direct, quadrature axis components |
| Ed | Drag energy (W) |
| Eg | Gravitational energy (W) |
| Ek | Kinetic energy (W) |
| Eon+off | The energy dissipated during turn-on and turn-off (W) |
| Er | Rolling energy (W) |
| Err | The energy dissipated during turn-off (due to the reverse recovery process) (W) |
| Et | The total energy of the section (W) |
| f | Frequency of the flux |
| Fa | Acceleration force (Nm) |
| Fd | Drag force (Nm) |
| Fg | Gravitation force (Nm) |
| Fr | Rolling force (Nm) |
| Fresistive | The sum of the resistive forces acting to decrease the vehicle speed (Nm) |
| fsw | Switching frequency |
| Ftractive | The sum of all the tractive forces acting to increase the vehicle speed (Nm) |
| Fw | Tractive force (Nm) |
| g | Gravitation constant (m/s2) |
| IIGBT | The average current (A) |
| k | Coupling coefficient |
| K | The scaling constant for transformation between three-phase to two-phase space vectors |
| kc | Eddy current parameter |
| kh | Hysteresis parameter |
| Ld, Lq | The d- and q-axis winding inductances |
| Lm | Mutual inductance of three inductors (mH) |
| m | Vehicle mass (kg) |
| n | Depends on Bpk, fr, and steel material (typically 1.6-2.2) |
| np | Number of pole pairs |
| Pa | Unit of standard atmospheric pressure (Pascal) |
| r | Wheel radius (m) |
| Rc | Core loss resistance (Ω) |
| RCE | IGBT on-state resistance (Ω) |
| RF | diode on-state resistance (Ω) |
| RL_ac | AC load resistance (Ω) |
| RL_dc | DC load resistance (Ω) |
| Rs | Stator winding resistance (Ω) |
| TNo. | Number of turns per inductor |
| v(t) | Vehicle speed (m/s) |
| Vbatt | Battery voltage (V) |
| vcar | Vehicle speed (m/s) |
| VCE | The IGBT threshold voltage of the on-state characteristics (V) |
| vwind | Wind speed (m/s) |
| w | Wheel speed (rad/s) |
| wel | The electrical angular speed (rad/s) |
| wr | The rotor angular speed (rad/s) |
| α | Road inclination angle (rad/s) |
| ρ | Air density (kg/m3) |
| Ψd, Ψq | Flux linkage in the d- and q-axis |
| Ψm | Flux linkage related to the permanent magnet |
References
- Rahman, K.M.; Patel, N.R.; Ward, T.G.; Nagashima, J.M.; Caricchi, F.; Crescimbini, F. Application of direct-drive wheel motor for fuel cell electric and hybrid electric vehicle propulsion system. Ieee Trans. Ind. Appl. 2006, 42, 1185–1192. [Google Scholar] [CrossRef]
- Mock, P. European Vehicle Market Statistics; The International Council of Clean Transportation (ICCT): Washington, DC, USA, 2014. [Google Scholar]
- Rajashekara, K. Present status and future trends in electric vehicle propulsion technologies. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 3–10. [Google Scholar] [CrossRef]
- Wu, X.; Freese, D.; Cabrera, A.; Kitch, W.A. Electric vehicles energy consumption measurement and estimation. Transp. Res. Part D Transp. Environ. 2015, 34, 52–67. [Google Scholar] [CrossRef]
- Gao, D.W.; Mi, C.; Emadi, A. Modeling and simulation of electric and hybrid vehicles. Proc. IEEE 2007, 95, 729–745. [Google Scholar] [CrossRef]
- Mapelli, F.L.; Tarsitano, D.; Mauri, M. Plug-in hybrid electric vehicle: Modeling, prototype realization, and inverter losses reduction analysis. IEEE Trans. Ind. Electron. 2010, 57, 598–607. [Google Scholar] [CrossRef] [Green Version]
- Schaltz, E. Design of a Fuel Cell Hybrid Electric Vehicle Drive System. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 2010. [Google Scholar]
- Wang, H.; Zhang, X.; Ouyang, M. Energy consumption of electric vehicles based on real-world driving patterns: A case study of Beijing. Appl. Energy 2015, 157, 710–719. [Google Scholar] [CrossRef]
- Vehicle Driving Patterns and Measurement Methods for Energy and Emissions Assessment. Available online: https://www.bitre.gov.au/sites/default/files/op_030.pdf (accessed on 8 December 2020).
- Fuel Economy Labeling of Motor Vehicle Revisions to Improve the Calculation of Fuel Economy Estimates. Available online: https://www.epa.gov/regulations-emissions-vehicles-and-engines/final-rule-fuel-economy-labeling-motor-vehicles-revisions (accessed on 8 December 2020).
- Advanced Powertrain Research Facility, Avta Nissan Leaf Testing and Analysis; Idaho National Laboratory (INL), Advanced Vehicle Testing Activity (AVTA): Idaho Falls, Idaho, 2013.
- Williamson, S.S.; Emadi, A.; Rajashekara, K. Comprehensive efficiency modeling of electric traction motor drives for hybrid electric vehicle propulsion applications. IEEE Trans. Veh. Technol. 2007, 56, 1561–1572. [Google Scholar] [CrossRef]
- Boretti, A. Analysis of the regenerative braking efficiency of a latest electric vehicle. In SAE Technical Paper; SAE International: Warrendale, PA, USA, 2013. [Google Scholar]
- Hayes, J.G.; Davis, K. Simplified electric vehicle powertrain model for range and energy consumption based on EPA coast-down parameters and test validation by Argonne national lab data on the Nissan Leaf. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014; pp. 1–6. [Google Scholar]
- An, F.; Barth, M.; Scora, G. Impacts of diverse driving cycles on electric and hybrid electric vehicle performance. In SAE Technical Paper; SAE International: Warrendale, PA, USA, 1997. [Google Scholar]
- de Gennaro, M.; Paffumi, E.; Martini, G.; Manfredi, U.; Scholz, H.; Lacher, H.; Kuehnelt, H.; Simic, D. Experimental investigation of the energy efficiency of an electric vehicle in different driving conditions. In SAE Technical Paper; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Zaccardi, J.-M.; Le Berr, F. Analysis and choice of representative drive cycles for light-duty vehicles case study for electric vehicles. Proceedings of the Institution of Mechanical Engineers. Part D J. Automob. Eng. 2012, 227, 605–616. [Google Scholar] [CrossRef]
- Neudorfer, H.; Binder, A.; Wicker, N. Analyse von unterschiedlichen fahrzyklen fur den einsatz von elektrofahrzeugen. Elektrotechnik Und Inf. 2006, 123, 352–360. [Google Scholar] [CrossRef]
- Qi, Z.; Shi, Q.; Zhang, H. Tuning of digital PID controllers using particle swarm optimization algorithm for a CAN-based DC motor subject to stochastic delays. IEEE Trans. Ind. Electron. 2020, 67, 5637–5646. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Rath, J.; Guerra, T.M.; Palhares, R.; Zhang, H. Robust set-invariance based fuzzy output tracking control for vehicle autonomous driving under uncertain lateral forces and steering constraints. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, J. Active steering actuator fault detection for an automatically-steered electric ground vehicle. IEEE Trans. Veh. Technol. 2017, 66, 3685–3702. [Google Scholar] [CrossRef]
- Kachroudi, S.; Grossard, M.; Abroug, N. Predictive driving guidance of full electric vehicles using particle swarm optimization. IEEE Trans. Veh. Technol. 2012, 61, 3909–3919. [Google Scholar] [CrossRef]
- Masjosthusmann, C.; Köhler, U.; Decius, N.; Büker, U. A vehicle energy management system for a battery-electric vehicle. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Seoul, Korea, 9–12 October 2012; pp. 339–344. [Google Scholar]
- Roscher, M.A.; Leidholdt, W.; Trepte, J. High-efficiency energy management in BEV applications. Int. J. Electr. Power Energy Syst. 2012, 37, 126–130. [Google Scholar] [CrossRef]
- Fouladi, E.; Baghaee, H.R.; Bagheri, M.; Gharehpetian, G.B. Smart V2G/G2V charging strategy for PHEVs in AC microgrids based on maximizing battery lifetime and RER/DER employment. IEEE Syst. J. 2020. [Google Scholar] [CrossRef]
- Fouladi, E.; Baghaee, H.R.; Bagheri, M.; Lu, M.; Gharehpetian, G.B. BESS Sizing in an Isolated Microgrid Including PREVs and RERs. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Jang, J.-S.R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Grunditz, E.A. BEV Powertrain Component Sizing with Respect to Performance, Energy Consumption and Driving Patterns. Ph.D. Thesis, Chalmers University of Technology, Goteborg, Swedish, 2014. [Google Scholar]
- Gillespie, T.D. Fundamentals of Vehicle Dynamics, 1st ed.; Society of Automotive Engineers, Inc.: Pittsburgh, PA, USA, 1992. [Google Scholar]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles—Fundamentals, Theory, and Design, 1st ed.; CRC Press LLC: Boca Raton, FL, USA, 2005. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008. [Google Scholar]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- GmbH, R.B. Automotive Handbook, 8th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2011. [Google Scholar]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems—Introduction to Modeling and Optimization, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Tires and Passenger Vehicle Fuel Economy: Informing Consumers, Improving Performance; Transportation Research Board Special Report 286, Committee for the National Tire Efficiency Study, Board on Energy and Environmental Systems; The National Academies Press: Washington, DC, USA, 2006.
- Saleeb, H.; Sayed, K.; Kassem, A.; Mostafa, R. Power management strategy for battery electric vehicles. IET Electr. Syst. Transp. 2019, 9, 65–74. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.A.; Dekkiche, A.I. A generic battery model for the dynamic simulation of hybrid electric vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Arlington, TX, USA, 9–12 September 2007; pp. 284–289. [Google Scholar]
- Bhutto, G.M.; Bak-Jensen, B.; Mahat, P. Modeling of the GIGRE low voltage test distribution network and the development of appropriate controllers. Int. J. Smart Grid Clean Energy 2013, 2, 184–191. [Google Scholar] [CrossRef] [Green Version]
- Smart, J.; Schey, S. Battery electric vehicle driving and charging behavior observed early in the EV project. Sae Int. J. Alt. Power 2012, 5, 27–33. [Google Scholar] [CrossRef] [Green Version]
- Saleeb, H.; Sayed, K.; Kassem, A.; Mostafa, R. Control and analysis of bidirectional interleaved hybrid converter with coupled inductors for electric vehicle applications. Electr. Eng. 2019, 102, 195–222. [Google Scholar] [CrossRef]
- Lin, C.-H.; Hsieh, C.-Y.; Chen, K.H. A li-ion battery charger with smooth control circuit and built-in resistance compensator for achieving stable and fast charging. IEEE Trans. Circuits Syst. 2010, 57, 506–517. [Google Scholar]
- Doerffel, D.; Sharkh, S.A. A critical review of using the Peukert equation for determining the remaining capacity of lead-acid and lithium-ion batteries. J. Power Sources 2006, 155, 395–400. [Google Scholar] [CrossRef]
- Ioannou, S.; Dalamagkidis, K.; Stefanakos, E.K.; Valavanis, K.P.; Wiley, P.H. Runtime, capacity and discharge current relationship for lead-acid and lithium batteries. In Proceedings of the 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 46–53. [Google Scholar]
- Ning, G.; Popov, B.N. Cycle life modeling of lithium-ion batteries. J Electrochem. Soc. 2004, 151, A1584–A1591. [Google Scholar] [CrossRef] [Green Version]
- Ning, G.; White, R.E.; Popov, B.N. A generalized cycle life model of rechargeable Li-ion batteries. Electrochim. Acta 2006, 51, 2012–2022. [Google Scholar] [CrossRef]
- Gabbar, H. Smart Energy Grid Engineering; Academic Press: San Francisco, CA, USA, 2016. [Google Scholar]
- Mandami, E.H. Applications of fuzzy algorithms for control of simple dynamic plant. Proc. Inst. Electr. Eng. 1974, 121, 1585–1588. [Google Scholar] [CrossRef]
- Shi, G.; Jing, Y.; Xu, A.; Ma, J. Study and simulation of based fuzzy-logic parallel hybrid electric vehicles control strategy. In Proceedings of the Sixth International Conference on Intelligent Systems Design and Applications (ISDA’06), Jinan, China, 16–18 October 2006; pp. 280–284. [Google Scholar]
- Kassem, R.; Sayed, K.; Kassem, A.; Mostafa, R. Power optimization scheme of induction motor using FLC for electric vehicle. IET Electr. Syst. Transp. 2020, 10, 301–309. [Google Scholar] [CrossRef]
- Sayed, K.; Gabbar, H.A. Electric vehicle to power grid integration using three-phase three-level AC/DC converter and PI-fuzzy controller. Energies 2016, 9, 532. [Google Scholar] [CrossRef]
- Sayed, K.; Ali, Z.M.; Aldhaifallah, M. Phase-shift PWM-controlled DC-DC converter with secondary-side current doubler rectifier for on-board charger application. Energies 2020, 13, 2298. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Data | Symbol | Value | Unit |
|---|---|---|---|
| Top speed | - | 130 | km/h |
| Acceleration | 0–100 km/h | 12.4 | s |
| Curb car mass | mc | 1085 | kg |
| Frontal area | Af | 2.57 | m2 |
| Wheel radius | Rw | 0.3 | m |
| Air density | ρ | 1.2041 | kg/m3 |
| Drag factor | Fd | 0.26 | - |
| Rotation resistance factor | Frr | 0.009 | - |
| Item | Parameters | Symbol | Value | Unit |
|---|---|---|---|---|
| Inverter | On-State switch resistance | Ron | 1 | mΩ |
| Snubber resistance | Rs | 8.3 | mΩ | |
| Forward voltage IGBT/Diode | Vf | 0.8 | V | |
| Switching frequency | fw | 60 | Hz | |
| EEM60 PMSM | Pairs of poles | P | 4 | – |
| Max. power | Pmax | 25 | kW | |
| Max. torque | Tmax | 210 | Nm | |
| Max. speed | Smax | 6000 | rpm | |
| The d- and q-axis winding inductances | Ld | 174 | µH | |
| Lq | 293 | µH | ||
| Stator resistance | Rs | 8.3 | mΩ | |
| Magnetic flux | Ψm | 71.115 | mWb |
| a | 1 | 2 | 3 | 4 | 5 | 6 | m/s2 |
|---|---|---|---|---|---|---|---|
| grade | 10.3 | 20.8 | 32.1 | 44.7 | 59.2 | 77.3 | % |
| grade | 5 | 10 | 15 | 20 | 25 | 30 | % |
| a | 0.49 | 0.98 | 1.46 | 1.92 | 2.38 | 2.82 | m/s2 |
| Specifications | Symbol | Value | Unit |
|---|---|---|---|
| Type of cells | LiFePO4 Lithium-ion battery | ||
| Nominal voltage | Vn | 3.2 | V |
| Internal resistance | Ri | <2 | mΩ |
| Nominal capacity | Cn | 20 | Ah |
| Max. cell voltage | Vmax | 3.8 | V |
| Min. cell voltage | Vmin | 2.6 | V |
| Open circuit output voltage | Vo | 2.8–3.7 | V |
| Optimal discharging current (0.5C *) | - | <10 | A |
| Maximal discharging current (3C *) | - | 60 | A |
| Optimal charging current (0.5C *) | - | <13 | A |
| Maximal charging current (1C *) | - | 20 | A |
| Cycle life (0.5C, 80% DOD *) | - | ˃2000 | Cycles |
| Self-discharge rate | - | <3% | % per month |
| Weight (tolerance +/− 50 g) | W | 0.65 | kg |
| Dimensions (width × length × height) | - | 71 × 178 × 28 | mm |
| Energy | E | 64 | Wh |
| Parameter | Controller | Rise Time | Settling Time | Peak Overshot |
|---|---|---|---|---|
| Battery Power | PI | 387.466 us | 794 ms | 1.158% |
| FLC | 315.564 us | 700 ms | 0.585% | |
| Battery Voltage | PI | 471.870 us | 782 ms | 0.815% |
| FLC | 396.549 us | 713 ms | 0.405% | |
| Battery Current | PI | 398.030 us | 793 ms | 0.226% |
| FLC | 320.362 us | 700 ms | 0.201% |
| Parameter | NEDC |
|---|---|
| Total time (s) | 1180 |
| Total distance (km) | 11.01663 |
| Maximum speed (km/h) | 120.09 |
| Average speed (km/h) | 33.6 |
| Average acceleration (m/s2) | 0.528 |
| Average deceleration (m/s2) | −0.719 |
| Parameter | UDDS |
|---|---|
| Total time (s) | 1369 |
| Total distance (km) | 11.99685 |
| Maximum speed (km/h) | 91.15 |
| Average speed (km/h) | 31.6 |
| Average acceleration (m/s2) | 0.429 |
| Average deceleration (m/s2) | −0.464 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sayed, K.; Kassem, A.; Saleeb, H.; Alghamdi, A.S.; Abo-Khalil, A.G. Energy-Saving of Battery Electric Vehicle Powertrain and Efficiency Improvement during Different Standard Driving Cycles. Sustainability 2020, 12, 10466. https://doi.org/10.3390/su122410466
Sayed K, Kassem A, Saleeb H, Alghamdi AS, Abo-Khalil AG. Energy-Saving of Battery Electric Vehicle Powertrain and Efficiency Improvement during Different Standard Driving Cycles. Sustainability. 2020; 12(24):10466. https://doi.org/10.3390/su122410466
Chicago/Turabian StyleSayed, Khairy, Ahmed Kassem, Hedra Saleeb, Ali S. Alghamdi, and Ahmed G. Abo-Khalil. 2020. "Energy-Saving of Battery Electric Vehicle Powertrain and Efficiency Improvement during Different Standard Driving Cycles" Sustainability 12, no. 24: 10466. https://doi.org/10.3390/su122410466