

Autonomous Vehicles in Mixed Traffic Conditions—A Bibliometric Analysis



Abstract
:1. Introduction
2. Key Aspects of AVs and Mixed Traffic
2.1. Impacts of AVs on Mixed Traffic
2.2. Driving Characteristics of AVs
- During free-flow conditions, AVs keep their desired speed constant since they have a small speed range as compared to CVs. From a standstill position, AVs accelerate more smoothly than CVs [30];
- AVs show shorter values and lower deviation in time headway, distance headway and reaction time as compared to CVs. In addition, AVs show lesser deviation in speed, a greater look-ahead distance and smaller path deviation [44];
- Smaller standstill distance, smaller headway, strict desired speed and lesser variation in acceleration and deceleration are associated with the driving characteristics of AVs [45];
- AVs follow the speed limits strictly which can result in less fuel consumption as compared to CVs [40];
- AVs minimize the headway and required gap during lane changing maneuvers due to a smaller reaction time but it encourages fewer dangerous lane changes along with failure in recognizing the other vehicle’s intention to change a lane [46];
- AVs follow a leading vehicle with a shorter headway than conventional vehicles. This shorter headway leads to increased vehicle throughput per lane [47];
- AVs are expected to behave deterministically and will show smaller oscillations during following conditions [48];
- AVs can dampen the shockwave propagation caused by the intensive behavior of leading vehicles, however, this will result in longer gaps between vehicles and consequently, decreases the capacity [49];
- AVs can be fuel efficient as compared to CVs due to various driving mechanisms, such as reduced distance between two vehicles, acceleration and deceleration characteristics, longitudinal and lateral behavior and gap acceptance thresholds [50];
- In a conservative environment, AVs do not effectively utilize the amber time which in turn results in lower traffic flow than conventional vehicles. AVs prefer to maintain acceleration/deceleration and speed limits, remain away from the dilemma zone and keep a clear distance from other vehicles [36];
- AVs show less speed deviances than conventional vehicles, which results in stability and better system performance [10];
- Cautious AVs improve the safety aspect by keeping longer time headways and distances, however, it affects the capacity and traffic performance [51];
- AVs affect the drivers of conventional vehicles to keep shorter headways when following platoons of equipped vehicles maintaining shorter headways [28];
- AVs equipped with higher automation levels tend to perform less lane changes to overtake slow moving vehicles which may increase the travel time [52].
2.3. Efforts to Incorporate AVs in Mixed Traffic
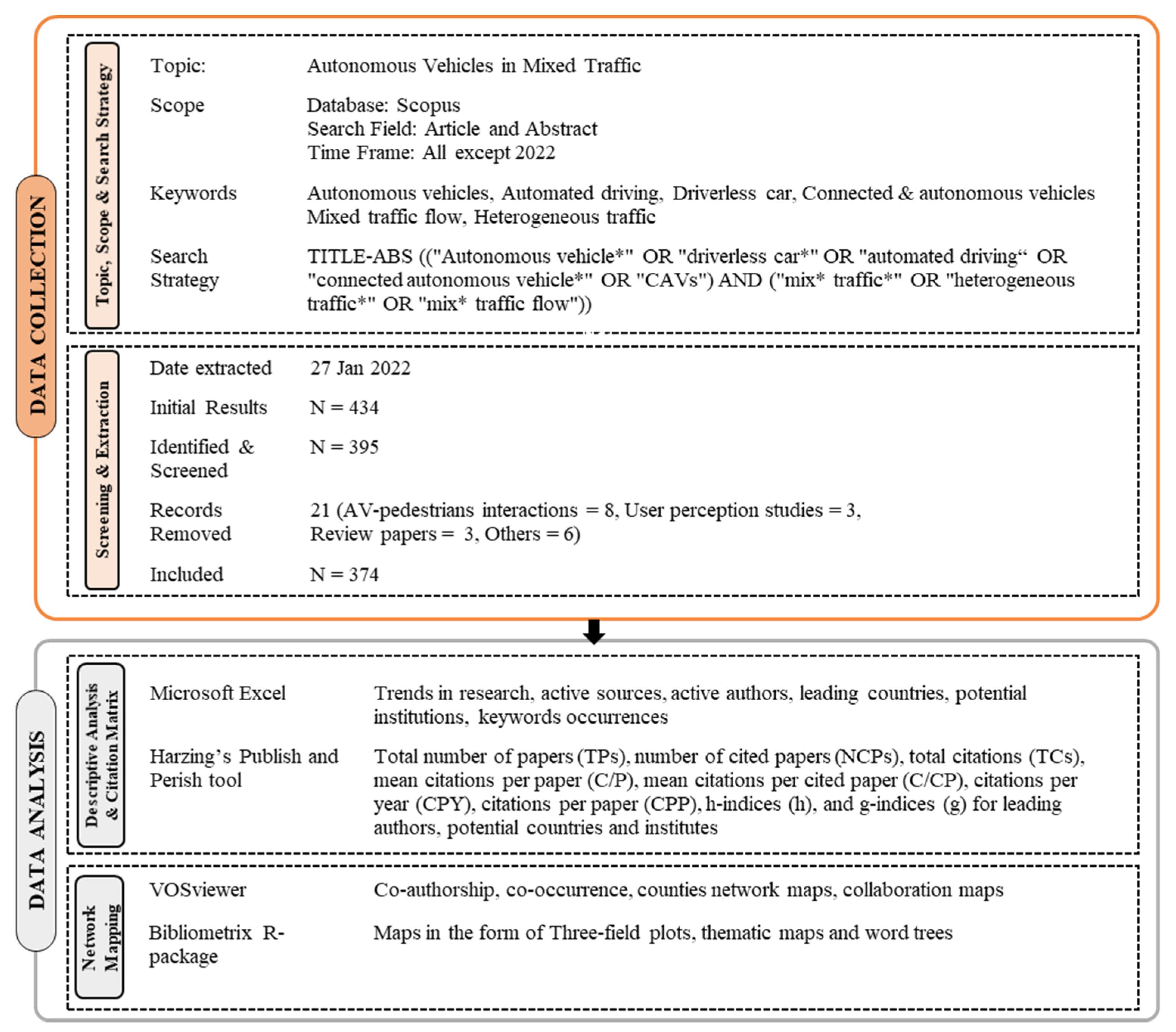
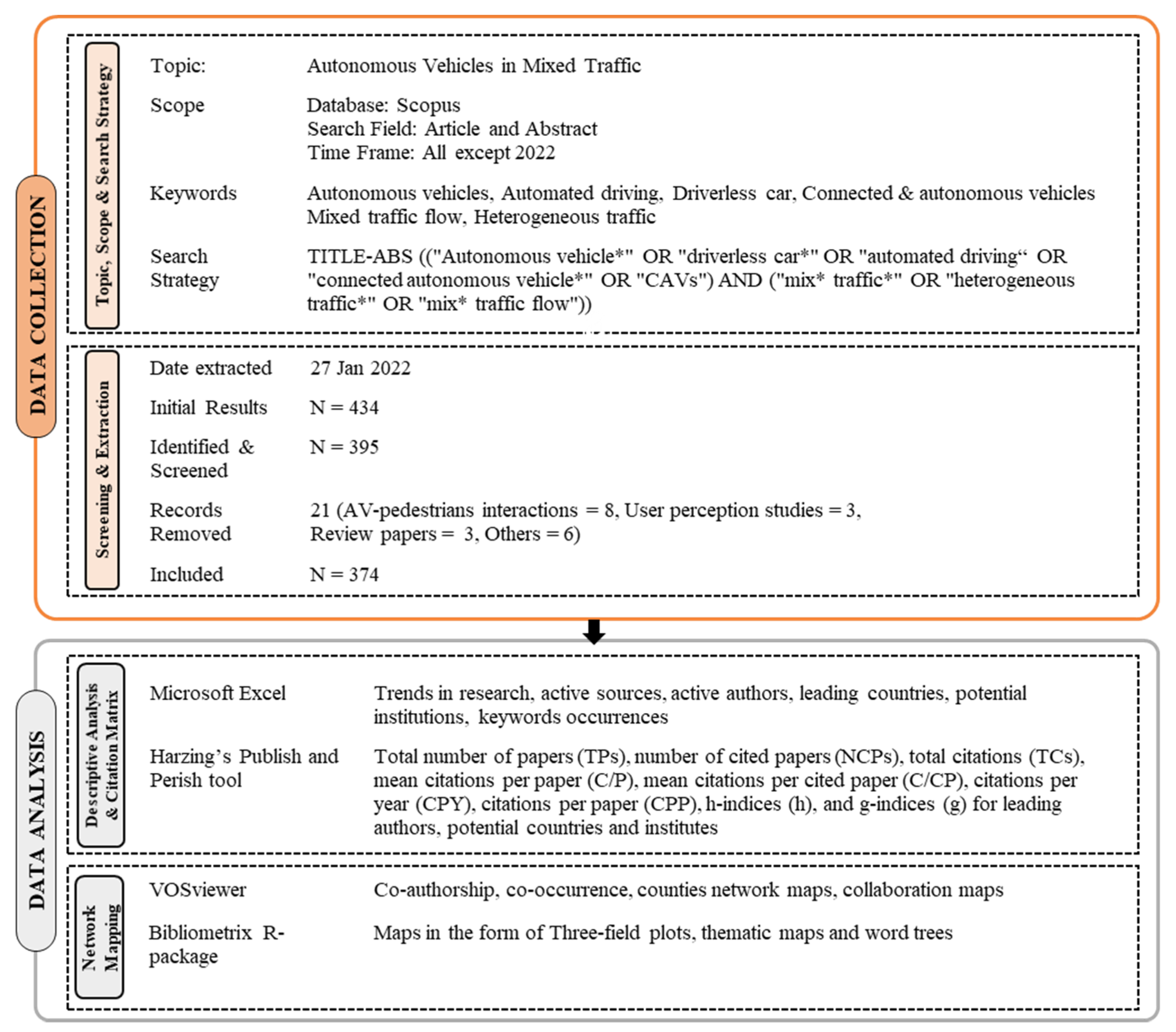
3. Data and Methods
- Microsoft Excel was used to create appropriate graphs showing the frequency and percentage of each publication;
- Harzing’s Publish and Perish tool was used to compute the citations metrics;
- VOSviewer was used to create and visualize the bibliometric networks;
- The Bibliometrix R-package was used to create three field plots, thematic maps and word trees.
4. Current Publication Status on Autonomous Vehicles in Mixed Traffic Conditions
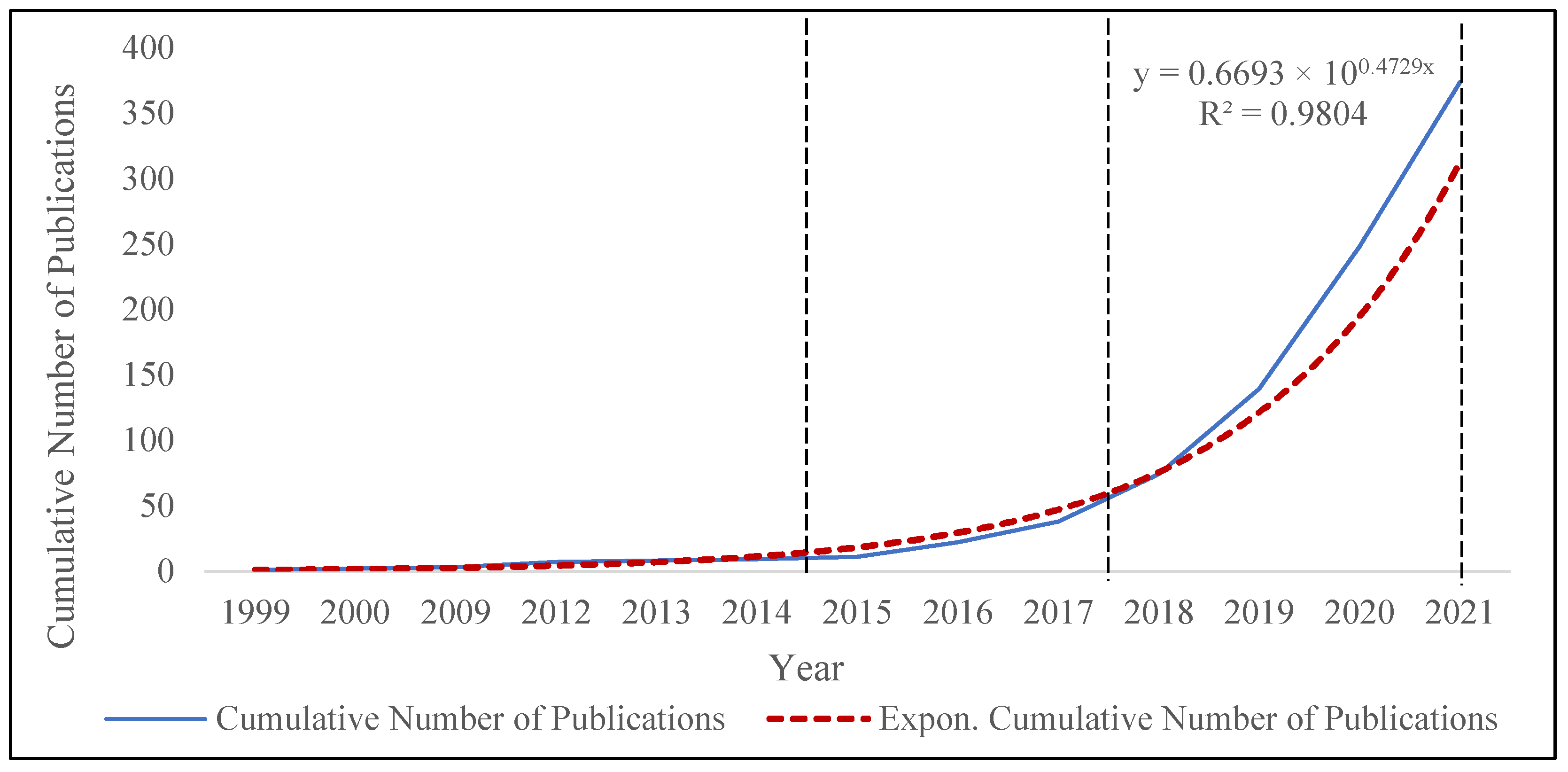
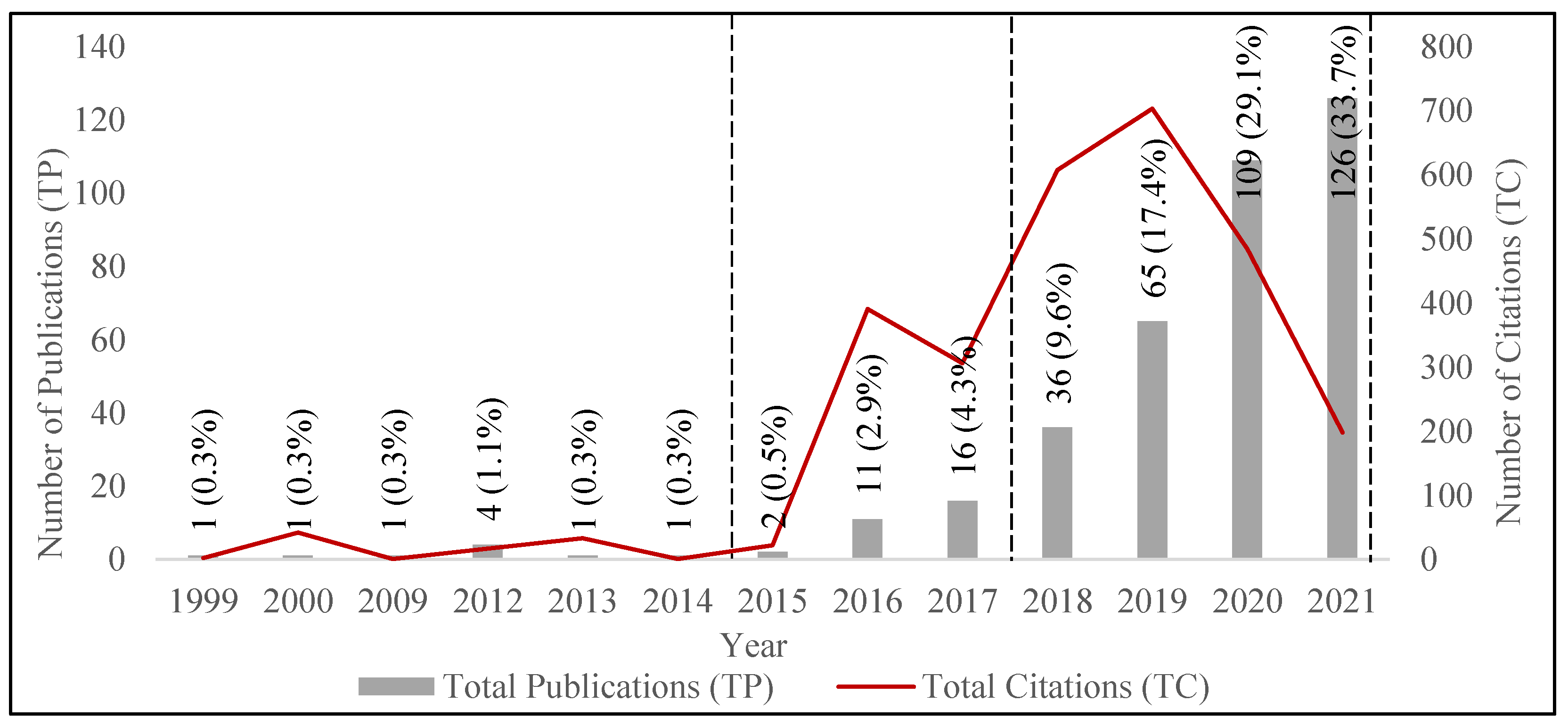
4.1. Annual Publications Trends
4.2. Citation Analysis of Most Dominant Articles
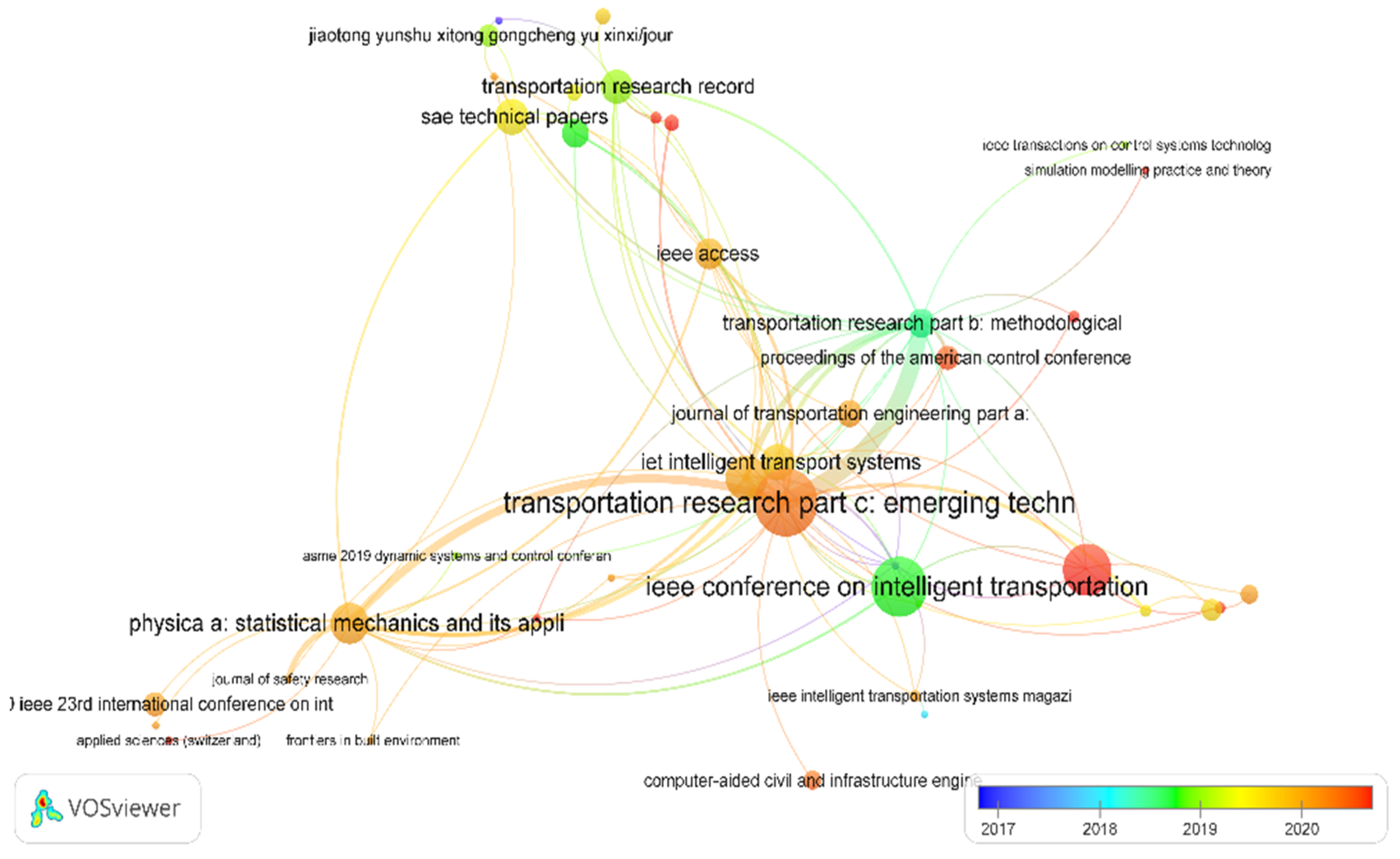
4.3. Citation Analysis of Most Productive Sources
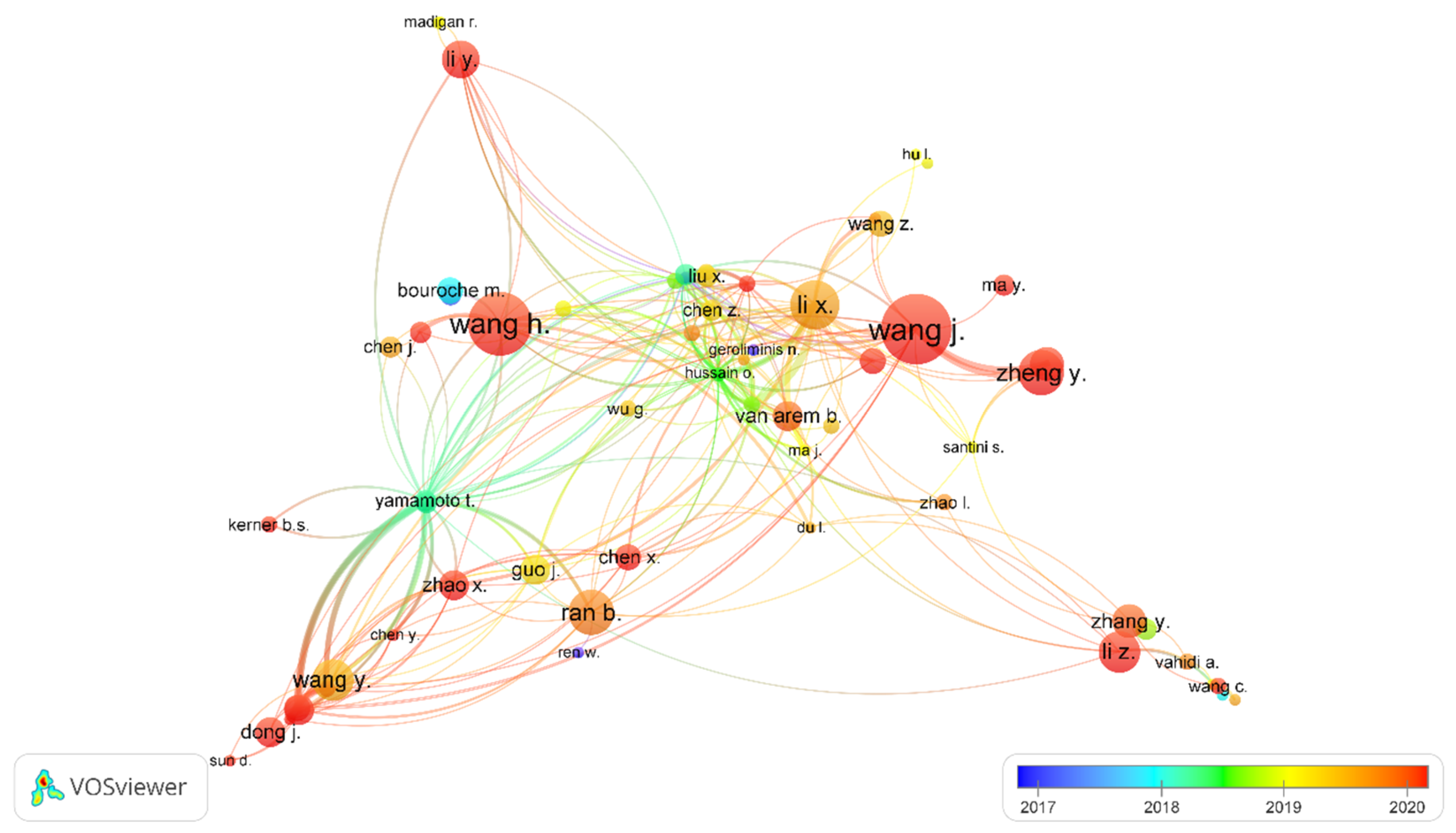
4.4. Citation Analysis of Most Prolific Authors
4.5. Citation Analysis of the Leading Organizations
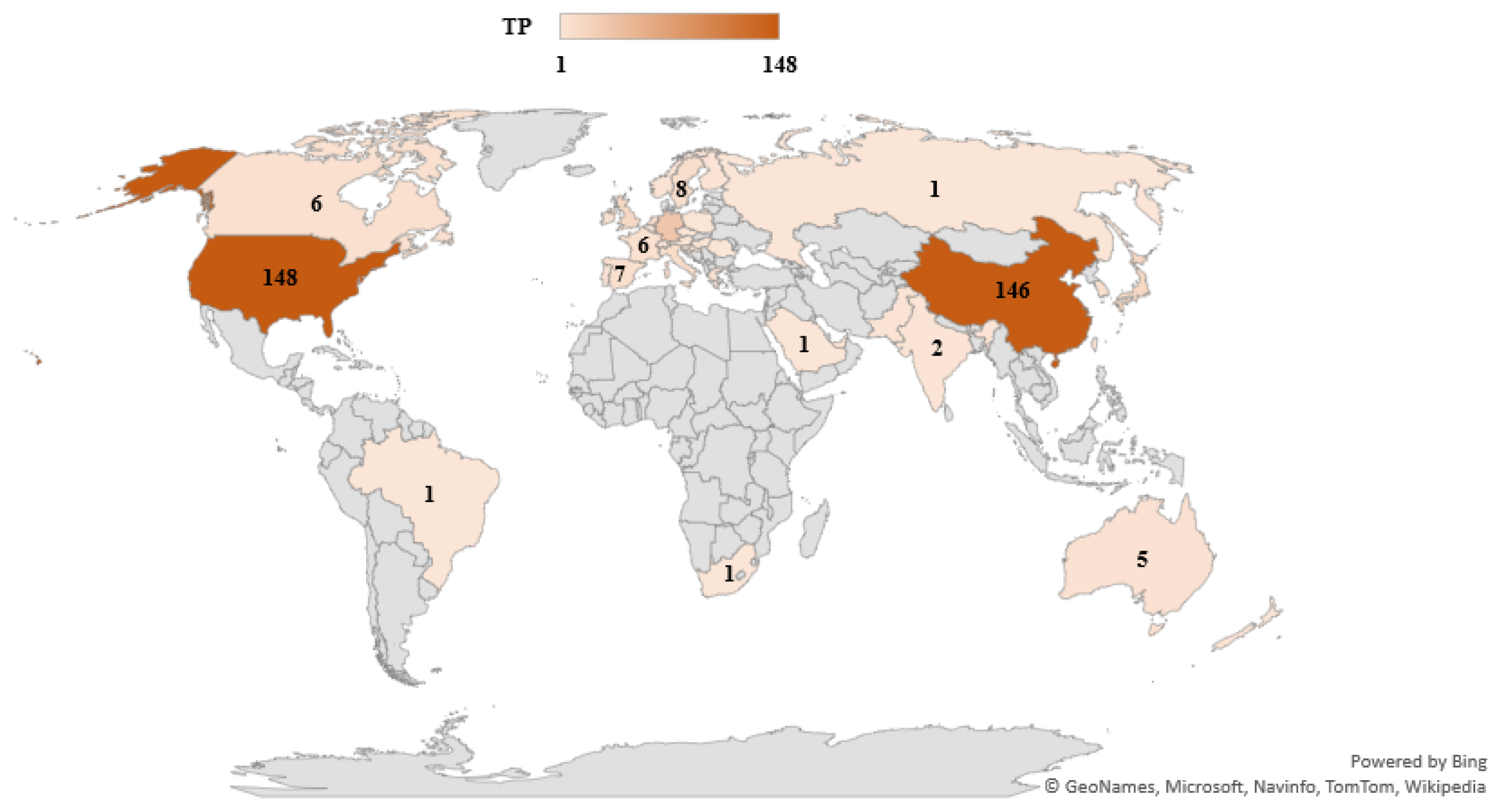
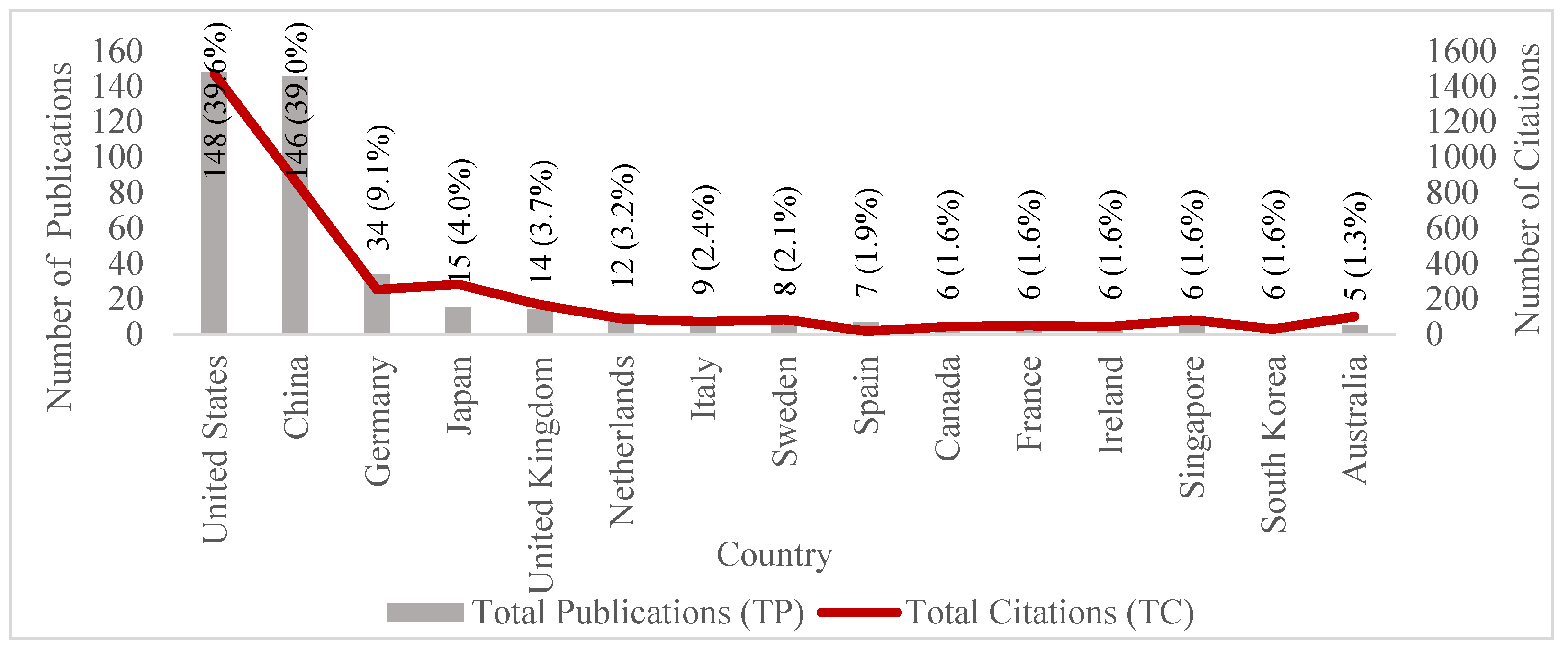
4.6. Citation Analysis of the Potential Countries
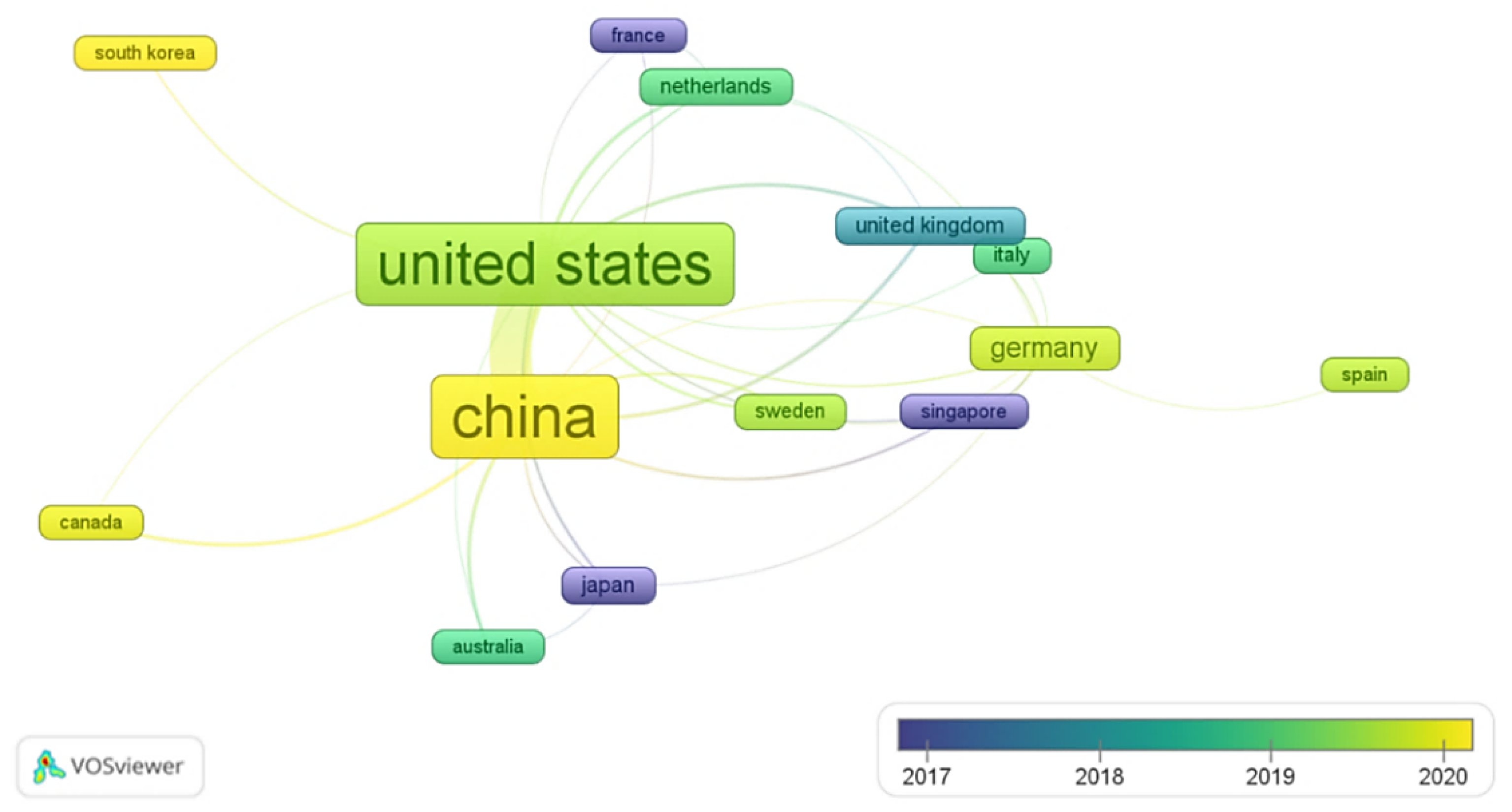
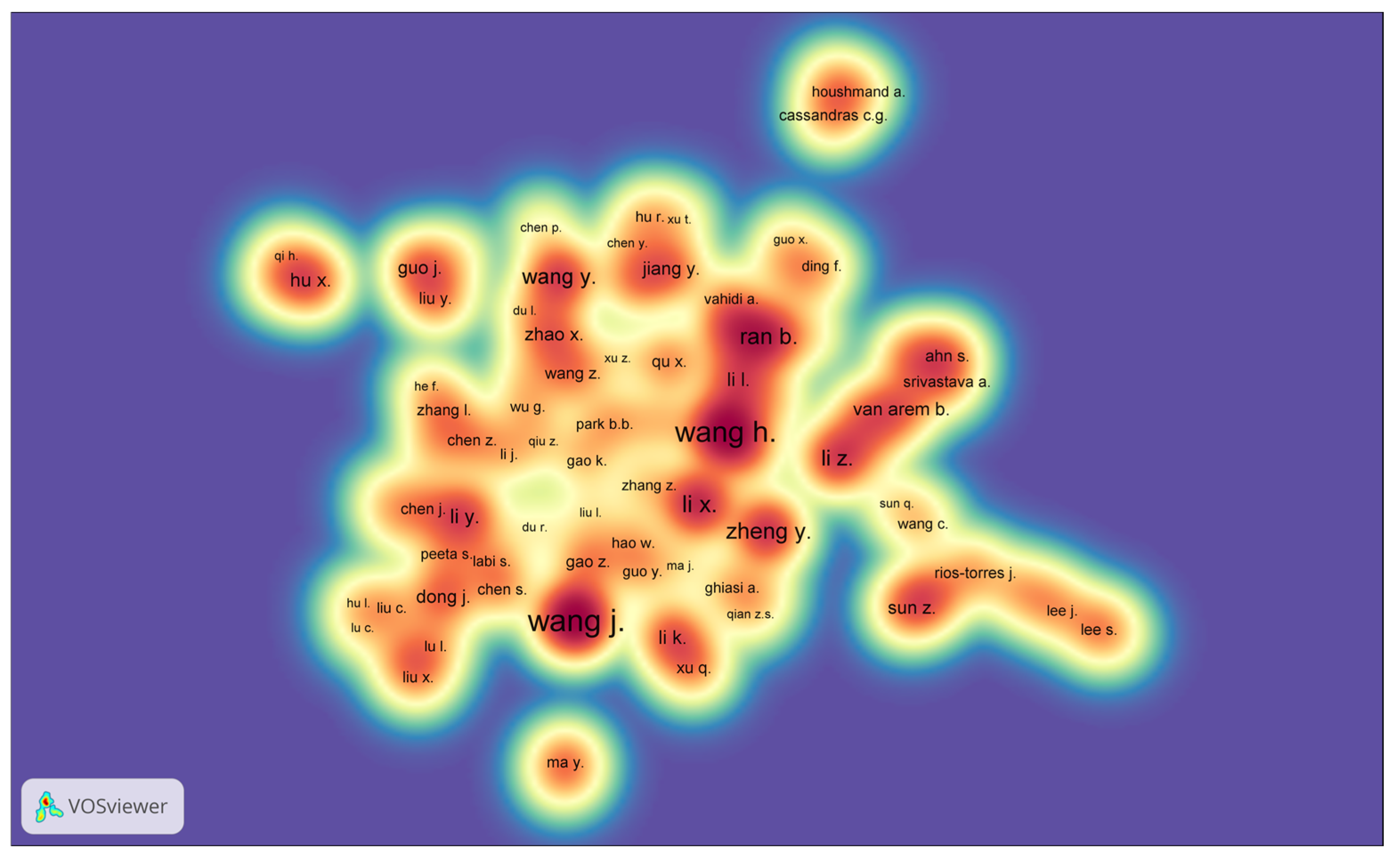
4.7. Co-Authorship Analysis
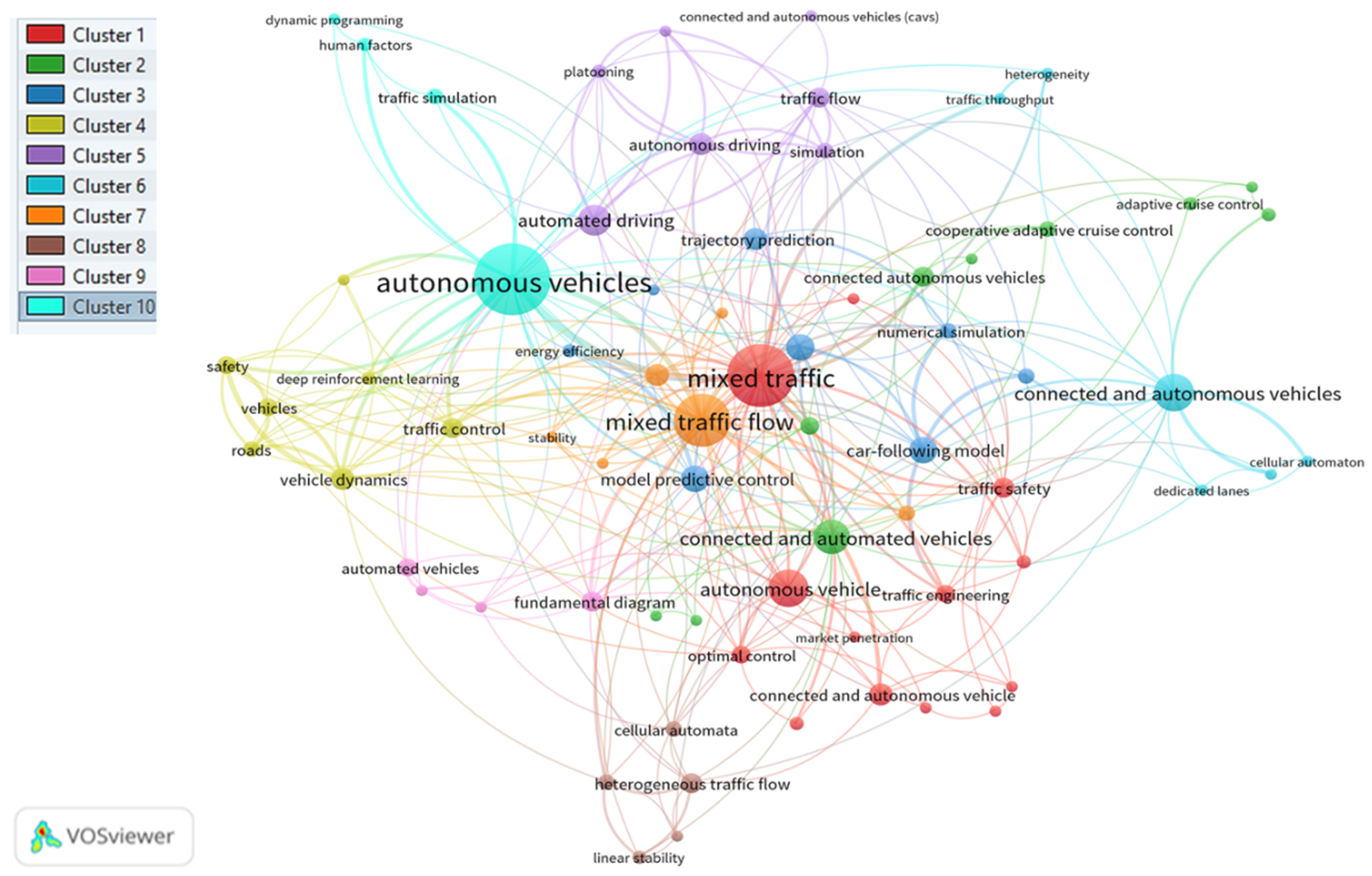
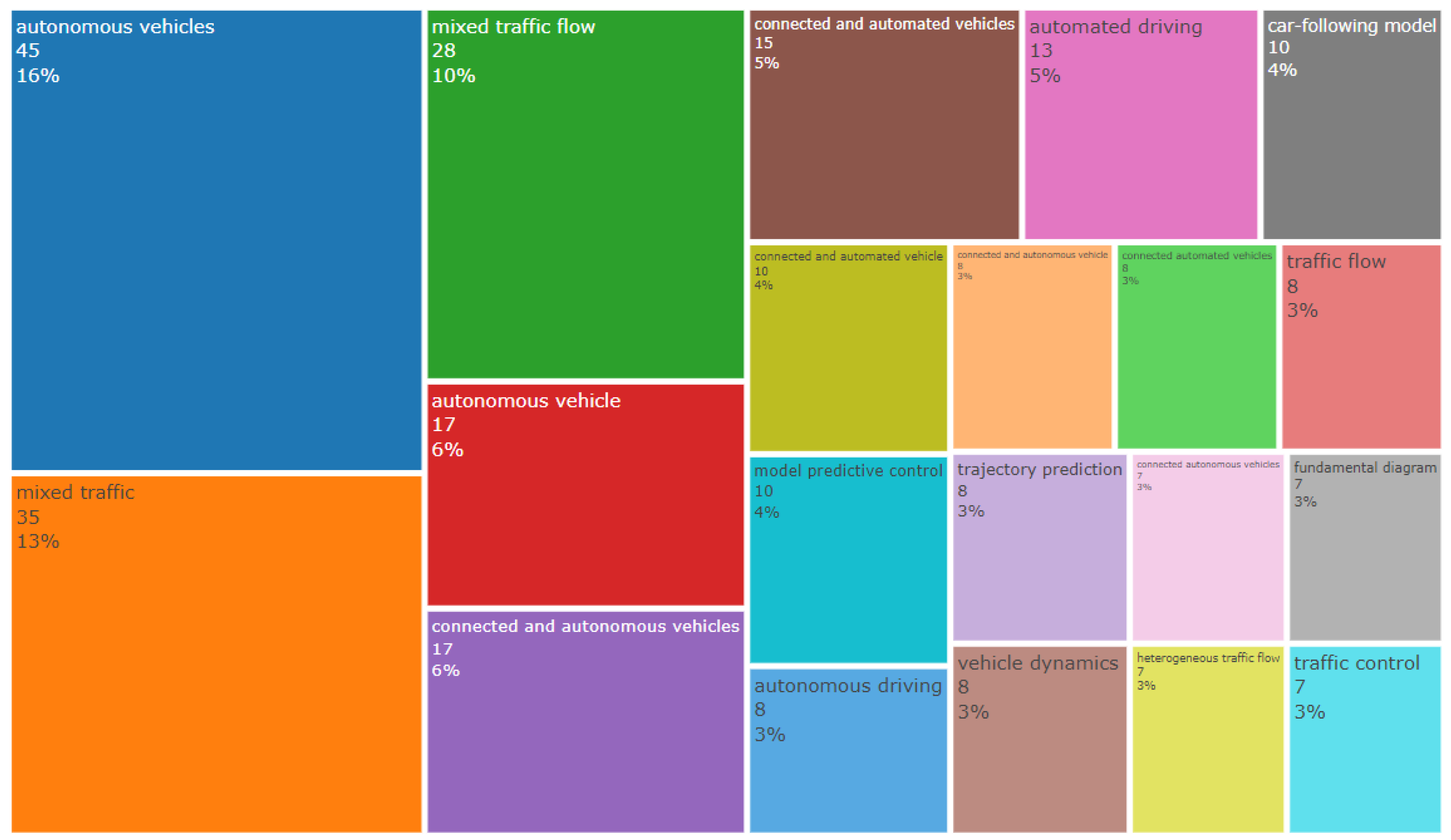
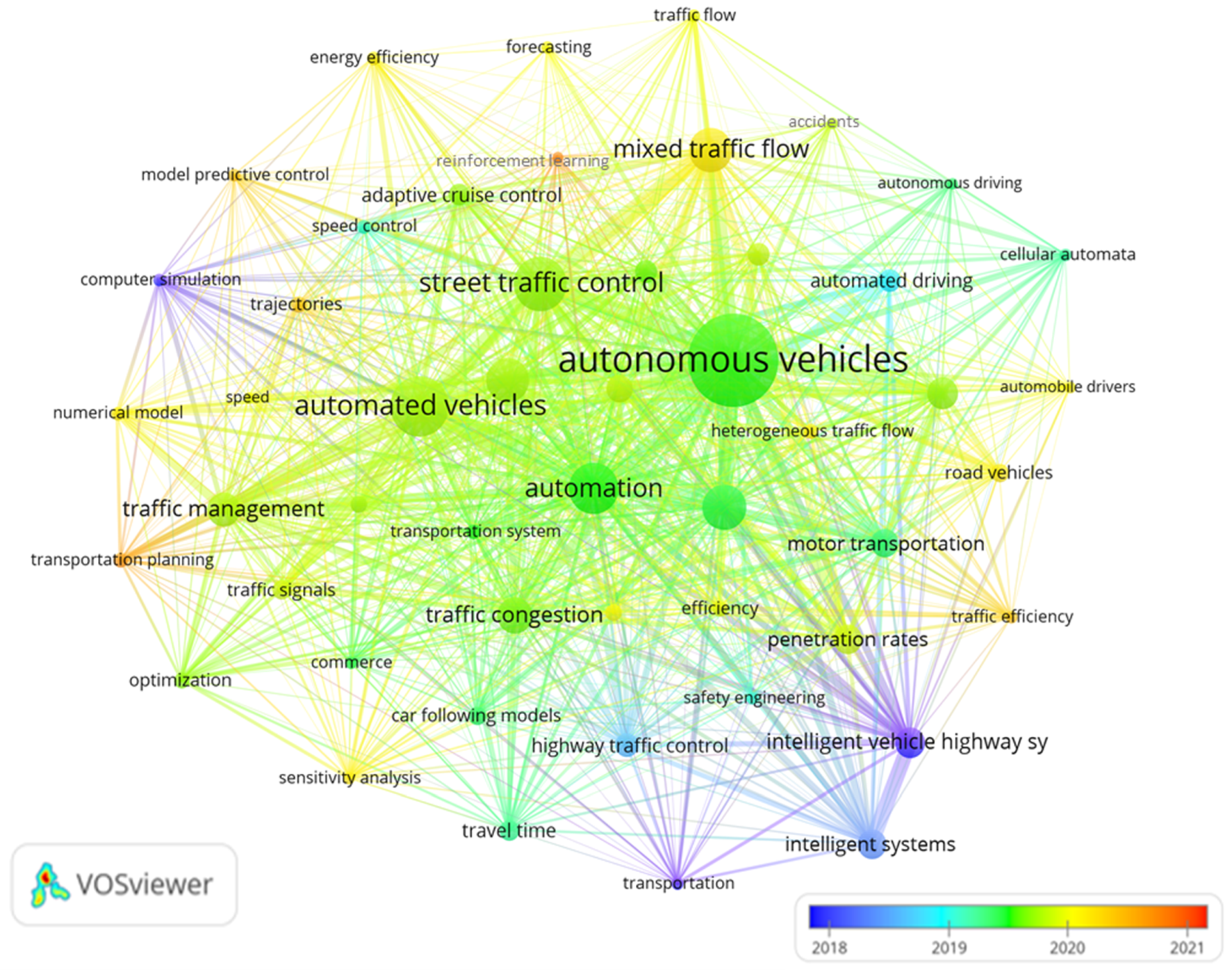
4.8. Co-Occurrence Analysis of Authors Keywords
- The cluster-1 is denoted by a red color and contains 13 author keywords, including “automated vehicles”, “autonomous vehicles”, connected and autonomous vehicle”, “connected vehicle”, “cooperative driving”, “market penetration”, “microscopic simulation”, “mixed traffic”, mixed traffic stream”, “optimal control”, “string stability”, “traffic engineering” and “traffic safety”;
- The cluster-2 is denoted by a green color and consists of 10 author keywords, such as “adaptive cruise control”, “connected and automated vehicle (cav)”, “connected and automated vehicles”, “connected autonomous vehicles”, “cooperative adaptive cruise control”, “intelligent transportation”, “intersection control”, “motion planning”, “smart city” and “trajectory planning”;
- The cluster-3 is denoted by a blue color and contains eight author keywords, including “car-following model”, “connected and automated vehicle”, “energy efficiency”, “machine learning”, “model predictive control”, “numerical simulation”, “stability analysis” and “trajectory prediction”;
- The cluster-4 is denoted by a yellow color and contains seven author keywords, including “connected vehicles”, “deep reinforcement learning”, “roads”, “safety”, “traffic control”, “vehicle dynamics” and “vehicles”;
- The cluster-5 is denoted by a purple color and contains seven author keywords, including “automated driving”, “autonomous driving”, “connected and automated vehicles (CAVs)”, “platooning”, “plex”, “simulation” and “traffic flow”;
- The cluster-6 is denoted by a sky blue color and contains six author keywords, such as “cellular automation”, “connected and autonomous vehicles”, “dedicated lanes”, heterogeneity”, heterogeneous flow” and “traffic throughput”;
- The cluster-7 is denoted by an orange color and consists of six author keywords, such as “car-following”, “cellular automata model”, “connected automated vehicle”, “connected automated vehicles”, “mixed traffic flow” and “stability”;
- The cluster-8 is denoted by a brown color and contains five author keywords, including “cellular automata”, “connected and automated vehicles (CAVs)”, “heterogeneous traffic flow”, “linear stability” and “reaction time”;
- The cluster-9 is denoted by a pink color and includes four author keywords, such as “automated vehicles”, “capacity”, “fundamental diagram” and “microscopic traffic simulation”;
- The cluster-10 is denoted by a cyan color and consists of four author keywords, including “autonomous vehicles”, “dynamic programming”, “human factors” and “traffic simulation”.
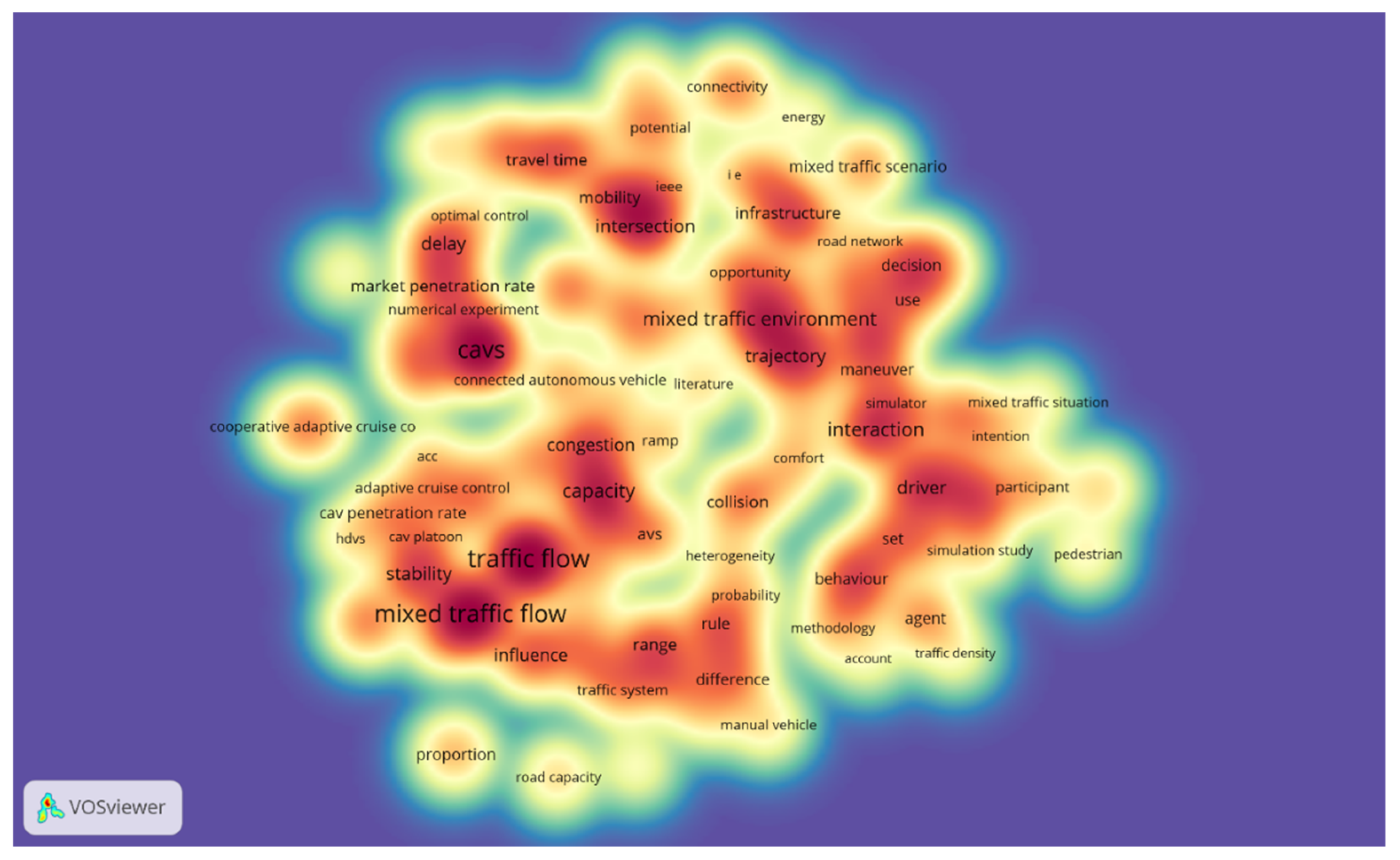
4.9. Text-Data Analysis
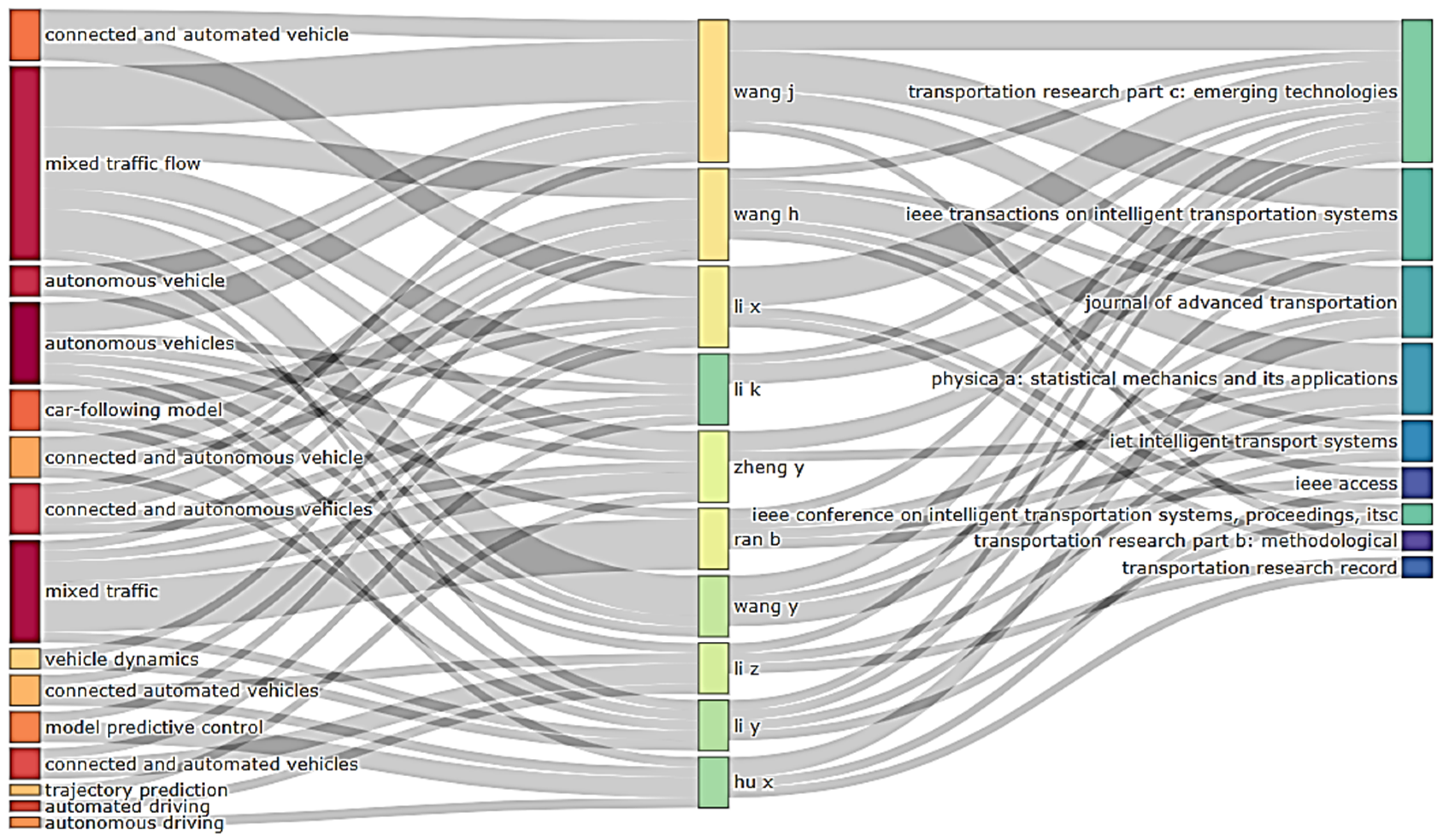
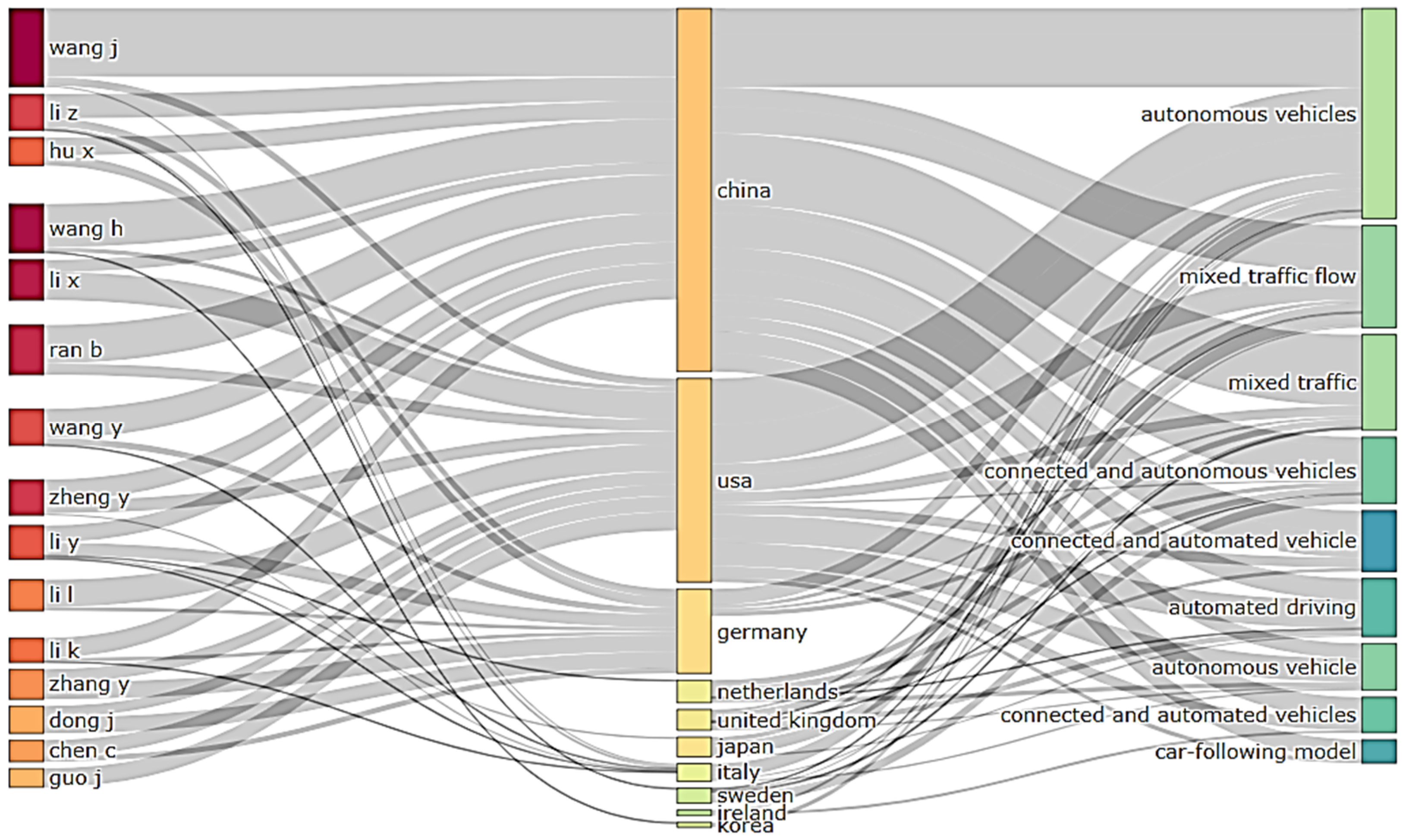
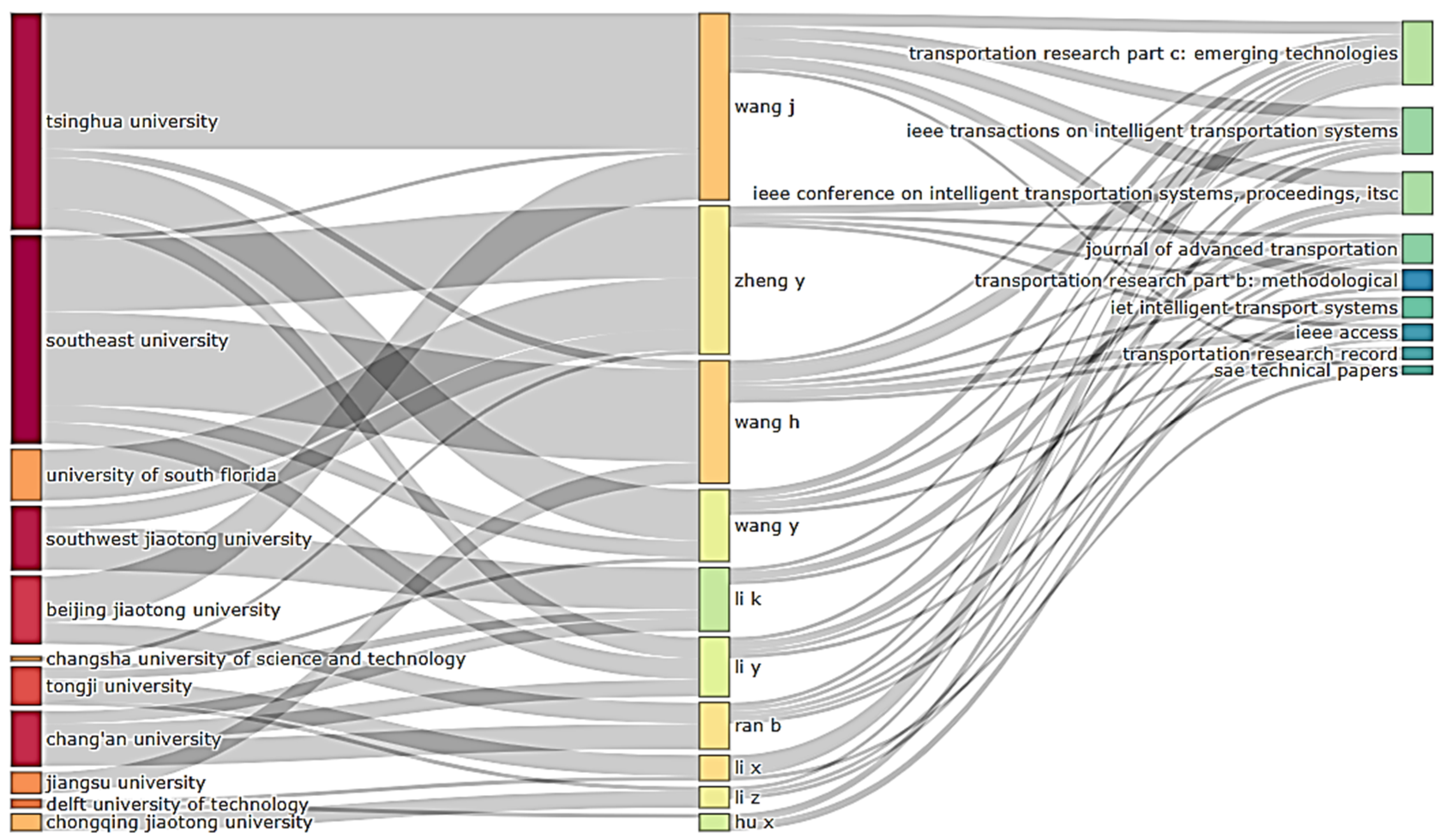
4.10. Three Field Plots on Autonomous Vehicles in Mixed Traffic Conditions
5. Discussion on Thematic Areas and Research Hotspots
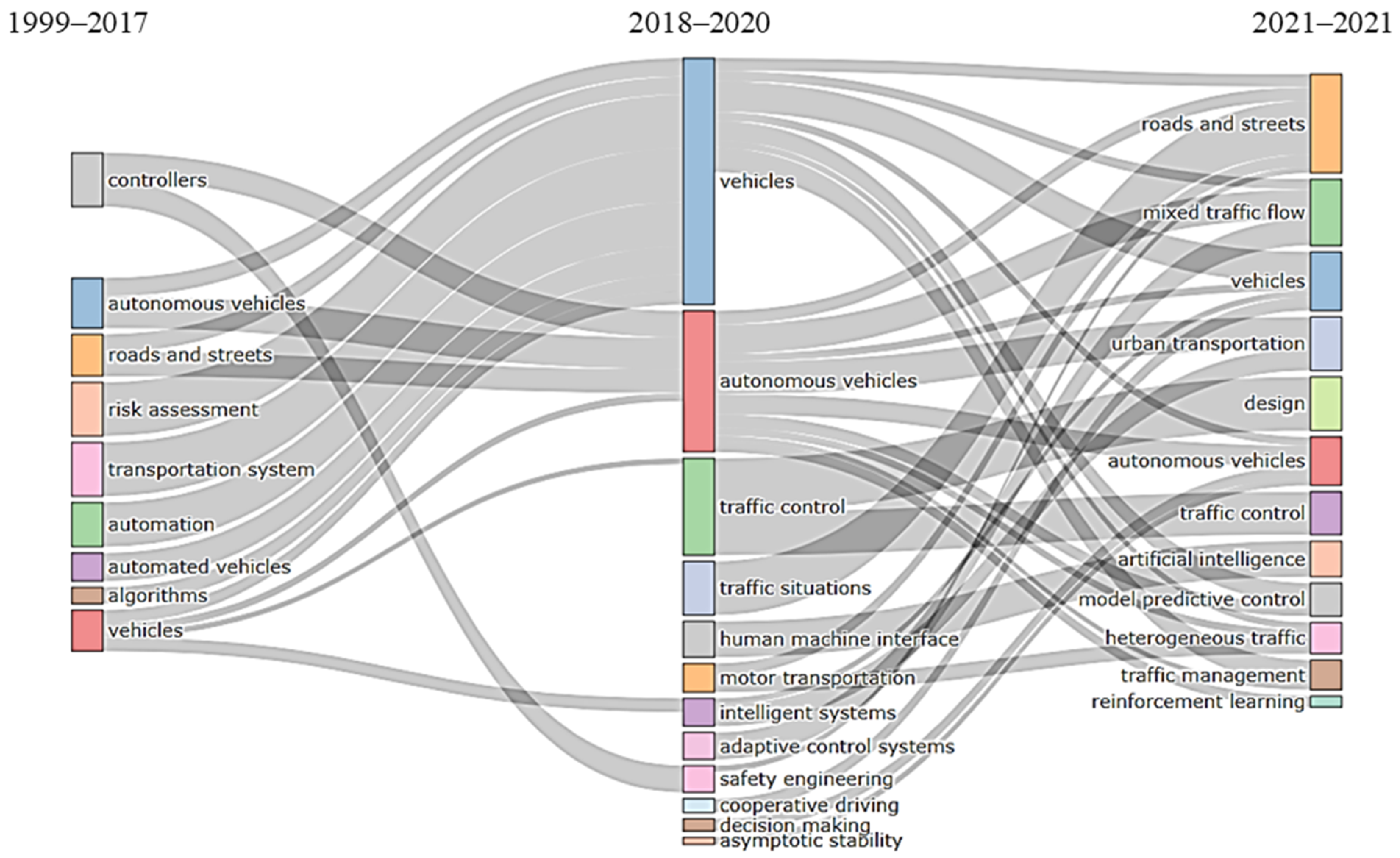
5.1. Thematic Evolution of Autonomous Vehicles in Mixed Traffic from 1999 to 2021
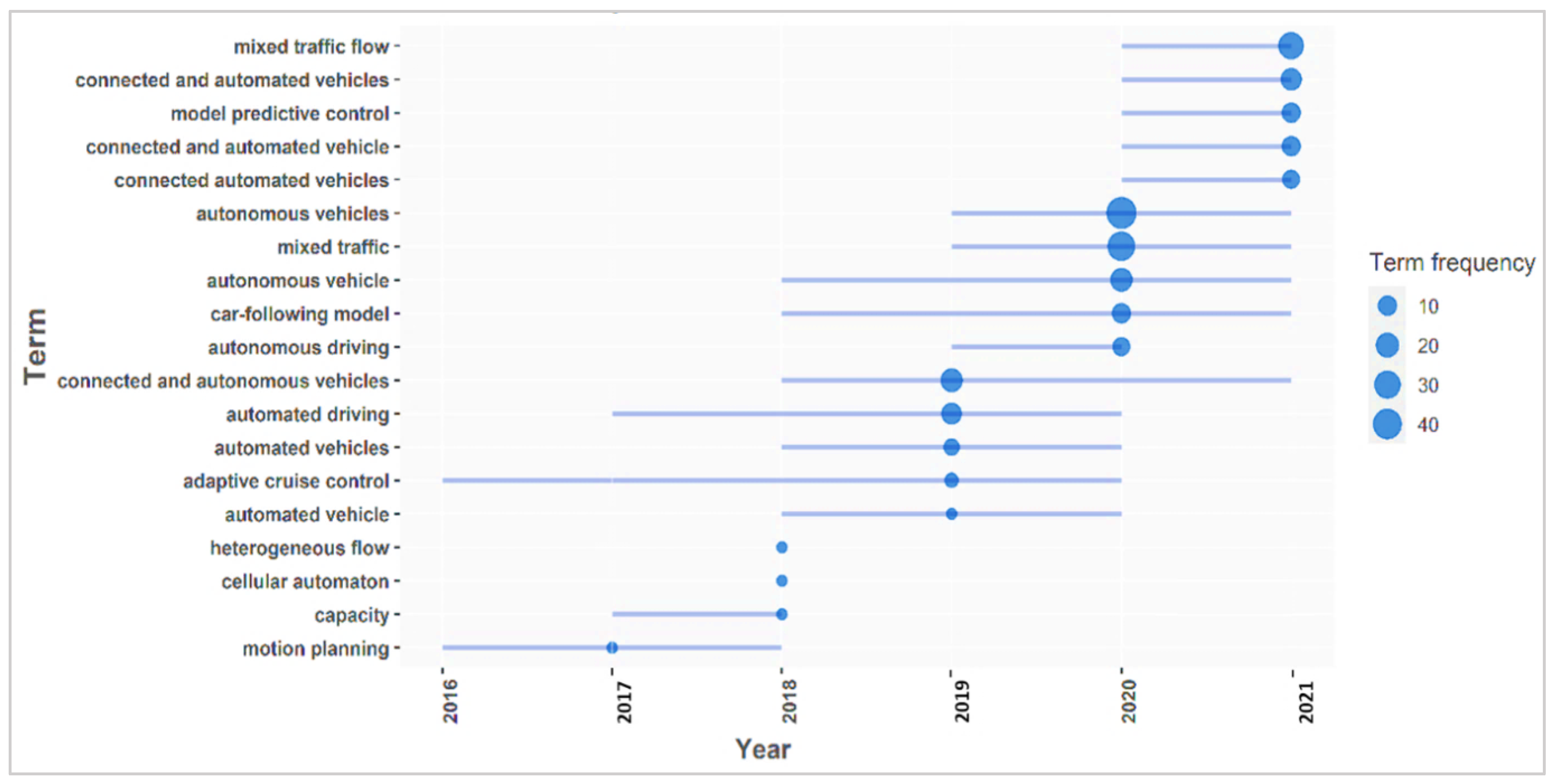
5.2. Trending Topics and Research Hotspots
6. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Minelli, S.; Izadpanah, P.; Razavi, S. Evaluation of Connected Vehicle Impact on Mobility and Mode Choice. J. Traffic Transp. Eng. 2015, 2, 301–312. [Google Scholar] [CrossRef]
- Hashim, H.H.; Omar, M.Z. Towards Autonomous Vehicle Implementation: Issues and Opportunities. J. Soc. Automot. Eng. Malaysia 2017, 1, 111–123. [Google Scholar] [CrossRef]
- Jana, A.; Sarkar, A.; Kallakurchi, J.; Kumar, S. Autonomous Vehicle as a Future Mode of Transport in India: Analyzing the Perception, Opportunities and Hurdles. In Proceedings of the Eastern Asia Society for Transportation Studies, Colombo, Sri Lanka, 9–12 September 2019. [Google Scholar]
- Buehler, M.; Iagnemma, K.; Singh, S. Autonomous Vehicles in City Traffic. In The DARPA Urban Challenge; Springer: Berlin/Heidelberg, Germany, 2009; Volume 56. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Bierstedt, J.; Gooze, A.; Gray, C.; Peterman, J.; Raykin, L.; Walters, J. Effects of Next-Generation Vehicles on Travel Demand and Highway Capacity. Available online: https://www.urbanismnext.org/resources/effects-of-next-generation-vehicles-on-travel-demand-and-highway-capacity (accessed on 27 July 2022).
- Silberg, G.; Wallace, R. Self-Driving Cars: The Next Revolution; KPMG LLP Center Automotive Research: Ann Arbor, MI, USA, 2012; Volume 9, pp. 132–146. [Google Scholar]
- Chehri, A.; Mouftah, H.T. Autonomous Vehicles in the Sustainable Cities, the Beginning of a Green Adventure. Sustain. Cities Soc. 2019, 51, 101751. [Google Scholar] [CrossRef]
- Sohrweide, T. Driverless Vehicles Set to Change the Way We Design Our Roadways? Short Elliott Hendrickson Inc.: Saint Paul, MN, USA, 2018. [Google Scholar]
- Talebpour, A.; Mahmassani, H.S. Influence of Connected and Autonomous Vehicles on Traffic Flow Stability and Throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Patella, S.M.; Scrucca, F.; Asdrubali, F.; Carrese, S. Carbon Footprint of Autonomous Vehicles at the Urban Mobility System Level: A Traffic Simulation-Based Approach. Transp. Res. Part D Transp. Environ. 2019, 74, 189–200. [Google Scholar] [CrossRef]
- Tibljaš, A.D.; Giuffrè, T.; Surdonja, S.; Trubia, S. Introduction of Autonomous Vehicles: Roundabouts Design and Safety Performance Evaluation. Sustainability 2018, 10, 1060. [Google Scholar] [CrossRef]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the Safety Impact of Autonomous Vehicles Using Simulation-Based Surrogate Safety Measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the Safety Impact of Connected and Autonomous Vehicles on Motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ Long-Term Adoption of Connected and Autonomous Vehicle Technologies. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Xie, H.; Tanin, E.; Karunasekera, S.; Qi, J.; Zhang, R.; Kulik, L.; Ramamohanarao, K. Quantifying the Impact of Autonomous Vehicles Using Microscopic Simulations. In Proceedings of the IWCTS 2019—12th International Workshop on Computational Transportation Science, Chicago, IL, USA, 5–8 November 2019; pp. 1–10. [Google Scholar]
- Fagnant, D.J. The Future of Fully Automated Vehicles: Opportunities for Vehicle- and Ride-Sharing, with Cost and Emissions Savings; Texas A&M Transportation Institute: College Station, TX, USA, 2014. [Google Scholar]
- Kockelman, A.K.; Avery, P.; Bansal, P.; Boyles, S.D.; Bujanovic, P.; Choudhary, T.; Clements, L.; Domnenko, G.; Fagnant, D.; Helsel, J.; et al. Implications of Connected and Automated Vehicles on the Safety and Operations of Roadway Networks: A Final Report; The University of Texas: Austin, TX, USA, 2016. [Google Scholar]
- Joshi, D.J.; Kale, I.; Gandewar, S.; Korate, O.; Patwari, D.; Patil, S. Reinforcement Learning: A Survey; Springer: Singapore, 2021; Volume 1311. [Google Scholar]
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2022. [Google Scholar]
- Sinha, A.; Chand, S.; Wijayaratna, K.P.; Virdi, N.; Dixit, V. Comprehensive Safety Assessment in Mixed Fleets with Connected and Automated Vehicles: A Crash Severity and Rate Evaluation of Conventional Vehicles. Accid. Anal. Prev. 2020, 142, 105567. [Google Scholar] [CrossRef]
- Almobayedh, H.B. Simulation of the Impact of Connected and Automated Vehicles at a Signalized Intersection; University of Dayton: Dayton, OH, USA, 2019. [Google Scholar]
- Zhang, G. Connected Autonomous Vehicle Control Optimization at Intersections. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2017; Volume 454, pp. 5–6. [Google Scholar]
- Sun, W.; Zheng, J.; Liu, H.X. A Capacity Maximization Scheme for Intersection Management with Automated Vehicles. Transp. Res. Procedia 2017, 23, 121–136. [Google Scholar] [CrossRef]
- Alfaseeh, L.; Djavadian, S.; Farooq, B. Impact of Distributed Routing of Intelligent Vehicles on Urban Traffic. In Proceedings of the 2018 IEEE International Smart Cities Conference (ISC2 2018), Kansas City, MO, USA, 16–19 September 2018; Institute of Electrical and Electronics Engineers Inc.: Toronto, ON, Canada, 2019. [Google Scholar]
- Rios-Torres, J.; Malikopoulos, A.A. Impact of Partial Penetrations of Connected and Automated Vehicles on Fuel Consumption and Traffic Flow. IEEE Trans. Intell. Veh. 2018, 3, 453–462. [Google Scholar] [CrossRef]
- Maarafi, A. The Impact of Autonomous Vehicles on Freeway Throughput. Master’s Thesis, West Virginia University, Morgantown, WV, USA, 2015. [Google Scholar]
- Aria, E.; Olstam, J.; Schwietering, C. Investigation of Automated Vehicle e Ffects on Driver’s Behavior and Traffic Performance. Transp. Res. Procedia 2016, 15, 761–770. [Google Scholar] [CrossRef]
- Motamedidehkordi, N.; Margreiter, M.; Benz, T. Effects of Connected Highly Automated Vehicles on the Propagation of Congested Patterns on Freeways. In Proceedings of the Transportation Research Board 95th Annual Meeting, Washington, DC, USA, 10–14 January 2016; pp. 1–16. [Google Scholar] [CrossRef]
- Khashayarfard, M.; Nassiri, H. Studying the Simultaneous Effect of Autonomous Vehicles and Distracted Driving on Safety at Unsignalized Intersections. J. Adv. Transp. 2021, 2021, 6677010. [Google Scholar] [CrossRef]
- El-Hansali, Y.; Farrag, S.; Yasar, A.; Shakshuki, E.; Al-Abri, K. Using Surrogate Measures to Evaluate the Safety of Autonomous Vehicles. Procedia Comput. Sci. 2021, 191, 151–159. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Osman, O.A.; Lord, D.; Dixon, K.K.; Dadashova, B. Investigating the Safety and Operational Benefits of Mixed Traffic Environments with Different Automated Vehicle Market Penetration Rates in the Proximity of a Driveway on an Urban Arterial. Accid. Anal. Prev. 2021, 152, 105982. [Google Scholar] [CrossRef] [PubMed]
- Postigo, I.; Olstam, J.; Rydergren, C. Effects on Traffic Performance Due to Heterogeneity of Automated Vehicles on Motorways: A Microscopic Simulation Study. In Proceedings of the VEHITS 2021 7th International Conference on Vehicle Technology and Intelligent Transport Systems, Oline, 28–30 April 2021; pp. 142–151. [Google Scholar]
- Hertel, T.W.; Reimer, J.J. Predicting the Poverty Impacts of Trade Reform. J. Int. Trade Econ. Dev. 2005, 14, 377–405. [Google Scholar] [CrossRef]
- Evanson, A. Connected Autonomous Vehicle (CAV) Simulation Using PTV Vissim. In Proceedings of the 2017 Winter Simulation Conference, Las Vegas, NV, USA, 3–6 December 2017; pp. 4420–4425. [Google Scholar]
- Wang, Y.; Wang, L. Autonomous Vehicles’ Performance on Single Lane Road: A Simulation under VISSIM Environment. In Proceedings of the 2017 10th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics, CISP-BMEI, Shanghai, China, 14–16 October 2017. [Google Scholar]
- Zhong, Z.; Lee, E.E. Alternative Intersection Designs with Connected and Automated Vehicle. In Proceedings of the 2019 IEEE 2nd Connected and Automated Vehicles Symposium (CAVS), Honolulu, HI, USA, 22–23 September 2019. [Google Scholar]
- Yu, H.; Tak, S.; Park, M.; Yeo, H. Impact of Autonomous-Vehicle-Only Lanes in Mixed Traffic Conditions. Transp. Res. Rec. 2019, 2673, 430–439. [Google Scholar] [CrossRef]
- Stogios, C.; Kasraian, D.; Roorda, M.J.; Hatzopoulou, M. Simulating Impacts of Automated Driving Behavior and Traffic Conditions on Vehicle Emissions. Transp. Res. Part D Transp. Environ. 2019, 76, 176–192. [Google Scholar] [CrossRef]
- Tomás, R.F.; Fernandes, P.; MacEdo, E.; Bandeira, J.M.; Coelho, M.C. Assessing the Emission Impacts of Autonomous Vehicles on Metropolitan Freeways. Transp. Res. Procedia 2020, 47, 617–624. [Google Scholar] [CrossRef]
- Khondaker, B.; Kattan, L. Variable Speed Limit: A Microscopic Analysis in a Connected Vehicle Environment. Transp. Res. Part C Emerg. Technol. 2015, 58, 146–159. [Google Scholar] [CrossRef]
- Li, D.; Wagner, P. Impacts of Gradual Automated Vehicle Penetration on Motorway Operation: A Comprehensive Evaluation. Eur. Transp. Res. Rev. 2019, 11, 36. [Google Scholar] [CrossRef]
- Rosique, F.; Navarro, P.J.; Fernández, C.; Padilla, A. A Systematic Review of Perception System and Simulators for Autonomous Vehicles Research. Sensors 2019, 19, 648. [Google Scholar] [CrossRef]
- Overtoom, I.; Correia, G.; Huang, Y.; Verbraeck, A. Assessing the Impacts of Shared Autonomous Vehicles on Congestion and Curb Use: A Traffic Simulation Study in The Hague, Netherlands. Int. J. Transp. Sci. Technol. 2020, 9, 195–206. [Google Scholar] [CrossRef]
- ElSahly, O.; Abdelfatah, A. Influence of Autonomous Vehicles on Freeway Traffic Performance for Undersaturated Traffic Conditions. Athens J. Τechnol. Eng. 2020, 7, 117–132. [Google Scholar] [CrossRef]
- Eissler, C.; Kaufmann, S. Model Calibration to Simulate Driving Recommendations for Traffic Flow Optimization in Oversaturated City Traffic. Procedia Comput. Sci. 2020, 170, 482–489. [Google Scholar] [CrossRef]
- Stanek, D.; Huang, E.; Milam, R.T.; Wang, A. Measuring Autonomous Vehicle Impacts on Congested Networks Using Simulation. In Proceedings of the Transportation Research Board Annual Meeting, Washington, DC, USA, 7–11 January 2018; Volume 18, pp. 1–19. [Google Scholar]
- Sukennik, P. Micro-Simulation Guide for Automated Vehicles; PTV Group: Karlsruhe, Germany, 2018. [Google Scholar]
- Olia, A.; Razavi, S.; Abdulhai, B.; Abdelgawad, H. Traffic Capacity Implications of Automated Vehicles Mixed with Regular Vehicles. J. Intell. Transp. Syst. Technol. Plan. Oper. 2018, 22, 244–262. [Google Scholar] [CrossRef]
- Stogios, C. Investigating the Effects of Automated Vehicle Driving Operations on Road Emissions and Traffic Performance. Master Thesis, University of Toronto, Toronto, ON, Canada, 2018. [Google Scholar]
- Atkins Research on the Impacts of Connected and Autonomous Vehicles (CAVs) on Traffic Flow Stage 2: Traffic Modelling and Analysis Technical Report. 2016. Available online: https://www.gov.uk/government/uploads/system/uploads/attachment_data/file/530091/impacts-of-connected-and-autonomous-vehicles-on-traffic-flow-summary-report.pdf (accessed on 18 April 2022).
- Jamson, A.H.; Merat, N.; Carsten, O.M.J.; Lai, F.C.H. Behavioural Changes in Drivers Experiencing Highly-Automated Vehicle Control in Varying Traffic Conditions. Transp. Res. Part C Emerg. Technol. 2013, 30, 116–125. [Google Scholar] [CrossRef] [Green Version]
- Mahmassani, H.S. Autonomous Vehicles and Connected Vehicle Systems: Flow and Operations Considerations. Transp. Sci. 2016, 50, 1140–1162. [Google Scholar] [CrossRef]
- Calvert, S.C.; van Arem, B. A Generic Multi-Level Framework for Microscopic Traffic Simulation with Automated Vehicles in Mixed Traffic. Transp. Res. Part C Emerg. Technol. 2020, 110, 291–311. [Google Scholar] [CrossRef]
- Zhang, Y.; Cassandras, C.G. The Penetration Effect of Connected Automated Vehicles in Urban Traffic: An Energy Impact Study. In Proceedings of the 2nd IEEE Conference on Control Technology and Applications, CCTA 2018, Copenhagen, Denmark, 21–24 August 2018; Institute of Electrical and Electronics Engineers Inc., Division of Systems Engineering, Center for Information and Systems Engineering, Boston University: Boston, MA, USA, 2018; pp. 620–625. [Google Scholar]
- Seraj, M.; Li, J.; Qiu, Z.; Wu, G. Modeling Microscopic Car-Following Strategy of Mixed Traffic to Identify Optimal Platoon Configurations for Multiobjective Decision-Making. J. Adv. Transp. 2018, 2018, 7835010. [Google Scholar] [CrossRef]
- Ghiasi, A.; Hussain, O.; Qian, Z.; Li, X. A Mixed Traffic Capacity Analysis and Lane Management Model for Connected Automated Vehicles: A Markov Chain Method. Transp. Res. Part B Methodol. 2017, 106, 266–292. [Google Scholar] [CrossRef]
- Qin, Y.Y.; Wang, H. Improving Traffic Safety via Traffic Flow Optimization of Connected and Automated Vehicles. China J. Highw. Transp. 2018, 31, 202–210. [Google Scholar]
- Lee, S.; Jeong, E.; Oh, M.; Oh, C. Driving Aggressiveness Management Policy to Enhance the Performance of Mixed Traffic Conditions in Automated Driving Environments. Transp. Res. Part A Policy Pract. 2019, 121, 136–146. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Modeling Connected and Autonomous Vehicles in Heterogeneous Traffic Flow. Phys. A Stat. Mech. Its Appl. 2018, 490, 269–277. [Google Scholar] [CrossRef]
- Jin, S.; Sun, D.H.; Zhao, M.; Li, Y.; Chen, J. Modeling and Stability Analysis of Mixed Traffic with Conventional and Connected Automated Vehicles from Cyber Physical Perspective. Phys. A Stat. Mech. Its Appl. 2020, 551, 124217. [Google Scholar] [CrossRef]
- Mohajerpoor, R.; Ramezani, M. Mixed Flow of Autonomous and Human-Driven Vehicles: Analytical Headway Modeling and Optimal Lane Management. Transp. Res. Part C Emerg. Technol. 2019, 109, 194–210. [Google Scholar] [CrossRef]
- Fu, R.; Li, Z.; Sun, Q.; Wang, C. Human-like Car-Following Model for Autonomous Vehicles Considering the Cut-in Behavior of Other Vehicles in Mixed Traffic. Accid. Anal. Prev. 2019, 132, 105260. [Google Scholar] [CrossRef]
- Ma, Y.; Zhu, X.; Zhang, S.; Yang, R.; Wang, W.; Manocha, D. TrafficPredict: Trajectory Prediction for Heterogeneous Traffic-Agents. Proc. AAAI Conf. Artif. Intell. 2019, 33, 6120–6127. [Google Scholar] [CrossRef] [Green Version]
- Ghiasi, A.; Li, X.; Ma, J. A Mixed Traffic Speed Harmonization Model with Connected Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2019, 104, 210–233. [Google Scholar] [CrossRef]
- Zhong, Z.; Lee, E.E.; Nejad, M.; Lee, J. Influence of CAV Clustering Strategies on Mixed Traffic Flow Characteristics: An Analysis of Vehicle Trajectory Data. arXiv 2020, arXiv:2003.08290. [Google Scholar] [CrossRef]
- Wang, Y.; Wei, L.; Chen, P. Trajectory Reconstruction for Freeway Traffic Mixed with Human-Driven Vehicles and Connected and Automated Vehicles. Transp. Res. Part C Emerg. Technol. 2020, 111, 135–155. [Google Scholar] [CrossRef]
- Sharath, M.N.; Velaga, N.R. Enhanced Intelligent Driver Model for Two-Dimensional Motion Planning in Mixed Traffic. Transp. Res. Part C Emerg. Technol. 2020, 120, 102780. [Google Scholar] [CrossRef]
- González Debada, E. Motion Planning for CAVs in Mixed Traffic, a Study on Roundabouts; EPFL: Lausanne, Switzerland, 2020. [Google Scholar] [CrossRef]
- Chen, Z.; He, F.; Zhang, L.; Yin, Y. Optimal Deployment of Autonomous Vehicle Lanes with Endogenous Market Penetration. Transp. Res. Part C Emerg. Technol. 2016, 72, 143–156. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Impact of Dedicated Lanes for Connected and Autonomous Vehicle on Traffic Flow Throughput. Phys. A Stat. Mech. Its Appl. 2018, 512, 588–597. [Google Scholar] [CrossRef]
- Ma, K.; Wang, H. Influence of Exclusive Lanes for Connected and Autonomous Vehicles on Freeway Traffic Flow. IEEE Access 2019, 7, 50168–50178. [Google Scholar] [CrossRef]
- Rehman, S.U.; Butt, F.M.; Ashiq, M.; Minhas, K.S.; Ajmal Khan, M. Bibliometric Analysis of Road Traffic Injuries Research in the Gulf Cooperation Council Region. F1000Research 2020, 9, 1155. [Google Scholar] [CrossRef]
- Wallin, J.A. Bibliometric Methods: Pitfalls and Possibilities. Basic Clin. Pharmacol. Toxicol. 2005, 97, 261–275. [Google Scholar] [CrossRef]
- Lin, Y.; Jia, H.; Zou, B.; Miao, H.; Wu, R.; Tian, J.; Wang, G. Multiobjective Environmentally Sustainable Optimal Design of Dedicated Connected Autonomous Vehicle Lanes. Sustainability 2021, 13, 3454. [Google Scholar] [CrossRef]
- Gandia, R.M.; Antonialli, F.; Cavazza, B.H.; Neto, A.M.; Lima, D.A.D.; Sugano, J.Y.; Nicolai, I.; Zambalde, A.L. Autonomous Vehicles: Scientometric and Bibliometric Review *. Transp. Rev. 2019, 39, 9–28. [Google Scholar] [CrossRef]
- Wang, S.; Yu, J. A Bibliometric Research on Next-Generation Vehicles Using Citespace. Recycling 2021, 6, 14. [Google Scholar] [CrossRef]
- Kushairi, N.; Ahmi, A. Flipped Classroom in the Second Decade of the Millenia: A Bibliometrics Analysis with Lotka’s Law. Educ. Inf. Technol. 2021, 26, 4401–4431. [Google Scholar] [CrossRef] [PubMed]
- Burnham, J.F. Scopus Database: A Review. Biomed. Digit. Libr. 2006, 3, 1–8. [Google Scholar] [CrossRef]
- Anik, M.A.H.; Hossain, M.; Habib, M.A. Investigation of Pedestrian Jaywalking Behaviour at Mid-Block Locations Using Artificial Neural Networks. Saf. Sci. 2021, 144, 105448. [Google Scholar] [CrossRef]
- Asha, A.Z.; Smith, C.; Freeman, G.; Crump, S.; Somanath, S.; Oehlberg, L.; Sharlin, E. Co-Designing Interactions between Pedestrians in Wheelchairs and Autonomous Vehicles; Association for Computing Machinery: New York, NY, USA, 2021; pp. 339–351. [Google Scholar] [CrossRef]
- Cooney, M.; Valle, F.; Vinel, A. Robot First Aid: Autonomous Vehicles Could Help in Emergencies. In Proceedings of the 2021 Swedish Artificial Intelligence Society Workshop (SAIS), Luleå, Sweden, 14–15 June 2021. [Google Scholar] [CrossRef]
- Yu, J.; Chen, A. Differentiating and Modeling the Installation and the Usage of Autonomous Vehicle Technologies: A System Dynamics Approach for Policy Impact Studies. Transp. Res. Part C Emerg. Technol. 2021, 127, 103089. [Google Scholar] [CrossRef]
- Camara, F.; Dickinson, P.; Fox, C. Evaluating Pedestrian Interaction Preferences with a Game Theoretic Autonomous Vehicle in Virtual Reality. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 410–423. [Google Scholar] [CrossRef]
- Di, X.; Shi, R. A Survey on Autonomous Vehicle Control in the Era of Mixed-Autonomy: From Physics-Based to AI-Guided Driving Policy Learning. arXiv 2020, arXiv:2007.05156. [Google Scholar] [CrossRef]
- Ramana, A.S.V.; Jabari, S.E. Power Laws and Phase Transitions in Heterogenous Car Following with Reaction Times. Phys. Rev. E 2021, 103, 032202. [Google Scholar] [CrossRef]
- Gonzalez-Delicado, J.J.; Gozalvez, J.; Mena-Oreja, J.; Sepulcre, M.; Coll-Perales, B. Alicante-Murcia Freeway Scenario: A High-Accuracy and Large-Scale Traffic Simulation Scenario Generated Using a Novel Traffic Demand Calibration Method in SUMO. IEEE Access 2021, 9, 154423–154434. [Google Scholar] [CrossRef]
- Stange, V.; Goralzik, A.; Vollrath, M. Keep Your Distance, Automated Vehicle!—Configuration of Automated Driving Behavior at an Urban Junction from a Cyclist’s Perspective. Lect. Notes Networks Syst. 2021, 270, 393–402. [Google Scholar] [CrossRef]
- Amini, R.E.; Dhamaniya, A.; Antoniou, C. Towards a Game Theoretic Approach to Model Pedestrian Road Crossings. Transp. Res. Procedia 2021, 52, 692–699. [Google Scholar] [CrossRef]
- Caballero, W.N.; Ríos Insua, D.; Banks, D. Decision Support Issues in Automated Driving Systems. Int. Trans. Oper. Res. 2021. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, X.; Yang, W.; Jin, W.; Zhu, W.; Zhao, B. W/CDM-MSFM-Driven Pedestrian Path Prediction at Signalized Crosswalk with Mixed Traffic Flow. Transp. B Transp. Dyn. 2020, 9, 172–197. [Google Scholar] [CrossRef]
- Koch, A.; Teichert, O.; Kalt, S.; Ongel, A.; Lienkamp, M. Powertrain Optimization for Electric Buses under Optimal Energy-Efficient Driving. Energies 2020, 13, 6451. [Google Scholar] [CrossRef]
- Padma, A.M.; Alsheikh, A.B.; Song, M.J.; Lundgren, M.; Andersson, J.; Enerbäck, O.; Dolins, S. User Acceptance of Mixed-Traffic Autonomous Shuttles in Gothenburg, Sweden. IOP Conf. Ser. Earth Environ. Sci. 2020, 588, 042002. [Google Scholar] [CrossRef]
- Feys, M.; Rombaut, E.; Vanhaverbeke, L. Experience and Acceptance of Autonomous Shuttles in the Brussels Capital Region. Sustainability 2020, 12, 8403. [Google Scholar] [CrossRef]
- Hilgarter, K.; Granig, P. Public Perception of Autonomous Vehicles: A Qualitative Study Based on Interviews after Riding an Autonomous Shuttle. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 226–243. [Google Scholar] [CrossRef]
- Kalatian, A.; Farooq, B. DeepWait: Pedestrian Wait Time Estimation in Mixed Traffic Conditions Using Deep Survival Analysis. arXiv 2019, arXiv:1904.11008. [Google Scholar] [CrossRef]
- Holländer, K. A Pedestrian Perspective on Autonomous Vehicles. In Proceedings of the IUI 2019 24th International Conference on Intelligent User Interfaces, Marina del Ray, CA, USA, 10–14 March 2019; pp. 149–150. [Google Scholar]
- Gandhi, P.; Luo, X.; Tian, R. Modeling Vehicle-Pedestrian Encountering Risks in the Natural Driving Environment Using Machine Learning Algorithms; Springer: Cham, Switzerland, 2019; Volume 11581, pp. 382–393. [Google Scholar] [CrossRef]
- Chen, T.; Chen, F.; Chen, C. Review on Driverless Traffic from Management Perspective. MATEC Web Conf. 2017, 124, 03002. [Google Scholar] [CrossRef]
- Forchhammer, N.; Lim, P.Y.; Cornet, H.; Frenkler, F. A Virtual Reality Study on How Communication and Gamification Influence Driver Compliance and Emotion. In Proceedings of the DSC 2020 EUROPE Driving Simulation and Virtual Reality Conference and Exhibition, Strasbourg, France, 9–11 September 2020; pp. 141–146. [Google Scholar]
- Zakaria, R.; Ahmi, A.; Ahmad, A.H.; Othman, Z. Worldwide Melatonin Research: A Bibliometric Analysis of the Published Literature between 2015 and 2019. Chronobiol. Int. 2021, 38, 27–37. [Google Scholar] [CrossRef] [PubMed]
- Khudzari, J.M.; Kurian, J.; Tartakovsky, B.; Raghavan, G.S.V. Bibliometric Analysis of Global Research Trends on Microbial Fuel Cells Using Scopus Database. Biochem. Eng. J. 2018, 136, 51–60. [Google Scholar] [CrossRef]
- Rillings, J.H. Automated Highways. Sci. Am. 1997, 277, 80–85. [Google Scholar] [CrossRef]
- Behringer, R. The DARPA Grand Challenge—Autonomous Ground Vehicles in the Desert. IFAC Proc. Vol. 2004, 37, 904–909. [Google Scholar] [CrossRef]
- Endo, S.; Ukawa, H.; Sanada, K.; Kitagawa, A. Study on Speed Control Law for Automated Driving of Heavy-Duty Vehicles Considering Acceleration Characteristics (Simulation of Transient Responses). JSAE Rev. 1999, 20, 331–336. [Google Scholar] [CrossRef]
- Merat, N.; Louw, T.; Madigan, R.; Wilbrink, M.; Schieben, A. What Externally Presented Information Do VRUs Require When Interacting with Fully Automated Road Transport Systems in Shared Space? Accid. Anal. Prev. 2018, 118, 244–252. [Google Scholar] [CrossRef]
- Gong, S.; Du, L. Cooperative Platoon Control for a Mixed Traffic Flow Including Human Drive Vehicles and Connected and Autonomous Vehicles. Transp. Res. Part B Methodol. 2018, 116, 25–61. [Google Scholar] [CrossRef]
- Guo, Y.; Ma, J.; Xiong, C.; Li, X.; Zhou, F.; Hao, W. Joint Optimization of Vehicle Trajectories and Intersection Controllers with Connected Automated Vehicles: Combined Dynamic Programming and Shooting Heuristic Approach. Transp. Res. Part C Emerg. Technol. 2019, 98, 54–72. [Google Scholar] [CrossRef]
- Fayazi, S.A.; Vahidi, A. Mixed-Integer Linear Programming for Optimal Scheduling of Autonomous Vehicle Intersection Crossing. IEEE Trans. Intell. Veh. 2018, 3, 287–299. [Google Scholar] [CrossRef]
- Waltman, L.; van Eck, N.J.; Noyons, E.C.M. A Unified Approach to Mapping and Clustering of Bibliometric Networks. J. Informetr. 2010, 4, 629–635. [Google Scholar] [CrossRef]
- Yao, Z.; Hu, R.; Wang, Y.; Jiang, Y.; Ran, B.; Chen, Y. Stability Analysis and the Fundamental Diagram for Mixed Connected Automated and Human-Driven Vehicles. Phys. A Stat. Mech. Its Appl. 2019, 533, 121931. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, J.; Taplin, J.; Wang, Y. Characteristic Analysis of Mixed Traffic Flow of Regular and Autonomous Vehicles Using Cellular Automata. J. Adv. Transp. 2017, 2017, 8142074. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, Z.; Xu, Z.; Wang, Y.; Li, X.; Qu, X. Field Experiments on Longitudinal Characteristics of Human Driver Behavior Following an Autonomous Vehicle. Transp. Res. Part C Emerg. Technol. 2020, 114, 205–224. [Google Scholar] [CrossRef]
- Van Eck, N.J.; Waltman, L. Software Survey: VOSviewer, a Computer Program for Bibliometric Mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef] [PubMed]
- van Eck, N.J.; Waltman, L. Visualizing Bibliometric Networks. In Measuring Scholarly Impact; Springer: Cham, Switzerland, 2014; pp. 285–320. [Google Scholar]
- Aria, M.; Cuccurullo, C. Bibliometrix: An R-Tool for Comprehensive Science Mapping Analysis. J. Informetr. 2017, 11, 959–975. [Google Scholar] [CrossRef]
- Kukkala, V.K.; Tunnell, J.; Pasricha, S.; Bradley, T. Advanced Driver-Assistance Systems: A Path Toward Autonomous Vehicles. IEEE Consum. Electron. Mag. 2018, 7, 18–25. [Google Scholar] [CrossRef]
- Park, J.E.; Byun, W.; Kim, Y.; Ahn, H.; Shin, D.K. The Impact of Automated Vehicles on Traffic Flow and Road Capacity on Urban Road Networks. J. Adv. Transp. 2021, 2021, 8404951. [Google Scholar] [CrossRef]
- Al-Turki, M.; Ratrout, N.T.; Rahman, S.M.; Reza, I. Impacts of Autonomous Vehicles on Traffic Flow Characteristics under Mixed Traffic Environment: Future Perspectives. Sustainability 2021, 13, 11052. [Google Scholar] [CrossRef]
- Manivasakan, H.; Kalra, R.; O’Hern, S.; Fang, Y.; Xi, Y.; Zheng, N. Infrastructure Requirement for Autonomous Vehicle Integration for Future Urban and Suburban Roads—Current Practice and a Case Study of Melbourne, Australia. Transp. Res. Part A Policy Pract. 2021, 152, 36–53. [Google Scholar] [CrossRef]
- McAslan, D.; Gabriele, M.; Miller, T.R. Planning and Policy Directions for Autonomous Vehicles in Metropolitan Planning Organizations (MPOs) in the United States. J. Urban Technol. 2021, 28, 175–201. [Google Scholar] [CrossRef]
- Mahdinia, I.; Mohammadnazar, A.; Arvin, R.; Khattak, A.J. Integration of Automated Vehicles in Mixed Traffic: Evaluating Changes in Performance of Following Human-Driven Vehicles. Accid. Anal. Prev. 2021, 152, 106006. [Google Scholar] [CrossRef] [PubMed]
- Remonda, A.; Veas, E.; Luzhnica, G. Comparing Driving Behavior of Humans and Autonomous Driving in a Professional Racing Simulator. PLoS ONE 2021, 16, e0245320. [Google Scholar] [CrossRef] [PubMed]
- Spence, J.C.; Kim, Y.B.; Lamboglia, C.G.; Lindeman, C.; Mangan, A.J.; McCurdy, A.P.; Stearns, J.A.; Wohlers, B.; Sivak, A.; Clark, M.I. Potential Impact of Autonomous Vehicles on Movement Behavior: A Scoping Review. Am. J. Prev. Med. 2020, 58, e191–e199. [Google Scholar] [CrossRef]
- Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review. Sustainability 2020, 12, 1719. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Study Site | Simulation Tool | Aspect | Impact/Findings |
|---|---|---|---|---|
| [27] | Freeway section Hypothetical section | VISSIM | Operation | Increase in throughput was observed by above 17% for freeways with MPR of 60% and higher. |
| [28] | Segment of highway including network of secondary urban roads | VISSIM | Operation | For AV scenario, average density improved by 8.09%, average travel speed enhanced relatively by 8.48% and average travel time improved by 9.00%. |
| [29] | Stretch of freeway | VISSIM | Operation | With increase in MPR of CAVs, congestion length and congestion area become smaller. In addition, the speed of shockwave reduces |
| [34] | Freeway and arterial network Freeway corridor | VISSIM | Operation | For network level evaluation, the study finds an improvement of 30% in network total delay and 6% in average network speed at 100% CAV penetration rate. For freeway corridor, the results show 33% improvement in network total delay and 23% in average network speed. |
| [12] | Roundabout | VISSIM | Operation | In all cases there was an increase in travel speed and decrease in average stop delay with the increase in percentage of AVs. |
| [35] | - | VISSIM | Operation | The study found incorporation of CAVs advantageous for operational performance as it reduced the travel time by 11% and delays by more than 40%. |
| [36] | 4-km long single lane road | VISSIM | Operation | The average capacity per lane for AV in single-lane road segment was 1.13% higher than HV. |
| [37] | Diverging Diamond Interchange Restricted Crossing U-Turn (RCUT) Intersection | VISSIM | Operation | The results show a 7% improvement in throughput when both Alternative Intersection Design and full penetration of level-3 autonomous vehicles are employed simultaneously. |
| [25] | Highway network | - | Operation | Incorporating higher percentages of CAVs improves the throughput, travel time, density and speed even with the highly congested conditions. |
| [33] | Motorway section | VISSIM | Operation | Results show higher vehicle throughput and lower travel delays as AVs evolve from cautious to more advanced logics. |
| [13] | Signalized intersection Roundabout | VISSIM | Safety | For signalized intersection, number of conflicts reduced from 20% to 65% with MPR between 50–100%. For the roundabout, the number of conflicts reduced by 29% to 64% with the 100% AV. |
| [30] | Unsignalized intersection | VISSIM | Safety | It was concluded that the presence of 100% of AVs could reduce the potential for accidents by up to 93%. |
| [31] | Motorway section | VISSIM | Safety | Reductions in total conflict points and rear-end collision points were 8.6% and 13%, respectively. Reduction in the annual crash rate was 12% |
| [38] | 10.2 km three-lane roadway with 400 m as merging and diverging section | AIMSUN | Operation and Safety | The study found that at higher penetration rates of AVs, throughput can improve up to 84% while safety conditions are different at different penetration rates. |
| [16] | Freeway network CBD roads Streets in university campus/ | Scalable Microscopic Adaptive Road Traffic Simulator (SMARTS) | Operation and Safety | The findings showed that higher proportion of low-level vehicles reduces the efficiency. A reduction of 11% in safety impact is reported for CBD at 3k volume when proportion of level 4 vehicles increases by 20%. |
| [32] | Urban arterial with unsignalized driveway | VISSIM | Operation and Safety | Increasing MPR of AVs improves the density and speed and reduces the number of lane changes and rear end collisions. |
| [26] | Merging on-ramp area | - | Operation and Environment | At 100% penetration rate of CAVs, a reduction of 16–60% for fuel consumption and 40–67% for travel time was observed. Highest benefits in travel time and fuel consumption are achieved with medium traffic conditions. |
| [39] | Signalized urban corridor Freeway section | VISSIM | Operation and Environment | Aggressive AVs can reduce the subsequent emission factors by up to 26% on the expressway, while cautiously programmed AVs could deteriorate traffic performance and lead to a 35% increase in emissions. |
| [11] | Road Network | - | Operation and Environment | 100% AVs penetration rate reduces the environmental impacts at mobility level by 60%. Network performances improves by 100% AV penetration in terms of travel time (–33%) and average network speed (+51%) whereas the total distance travelled increases for highways (8%). |
| [40] | Freeway corridor | VISSIM | Operation and Environment | Corridor-level analysis showed decreases of 5% in emissions can be expected with AV technology, but it penalizes travel time up to 13% for both AVs and CVs, when compared to the existing situation |
| [41] | Hypothetical 8-km single-lane road | VISSIM | Operation, Safety and Environment | The proposed algorithm involving connected vehicles can reduce travel time by 20%, safety improvement of 6–11% and overall fuel consumption reduction of 5–16% with 100% CV penetration |
| [42] | 3 km stretch on Auckland Motorway | SUMO | Operation, Safety and Environment | For current scenarios, having 0.5% to 0.95% of the capacity, deploying more than 70% of AVs can improve travel time, TTC, emission and fuel consumption. |
| No. | Stage | Search String | Document Results |
|---|---|---|---|
| 1 | Initial search string | TITLE-ABS ((“Autonomous vehicle*” OR “driverless car*” OR “automated driving” OR “connected autonomous vehicle*” OR “CAVs”) AND (“mix* traffic*” OR “heterogeneous traffic*” OR “mix* traffic flow”)) | 434 |
| 2 | Specifying the document type | TITLE-ABS ((“Autonomous vehicle*” OR “driverless car*” OR “automated driving” OR “connected autonomous vehicle*” OR “CAVs”) AND (“mix* traffic*” OR “heterogeneous traffic*” OR “mix* traffic flow”)) AND (LIMIT-TO (DOCTYPE, “ar”) OR LIMIT-TO (DOCTYPE, “cp”)) | 404 |
| 3 | Limiting the time frame | TITLE-ABS ((“Autonomous vehicle*” OR “driverless car*” OR “automated driving” OR “connected autonomous vehicle*” OR “CAVs”) AND (“mix* traffic*” OR “heterogeneous traffic*” OR “mix* traffic flow”)) AND (LIMIT-TO (DOCTYPE,”ar”) OR LIMIT-TO (DOCTYPE, “cp”)) AND (EXCLUDE (PUBYEAR, 2022)) | 395 |
| 4 | Screening and excluding the irrelevant documents | TITLE-ABS ((“Autonomous vehicle*” OR “driverless car*” OR “automated driving” OR “connected autonomous vehicle*” OR “CAVs”) AND (“mix* traffic*” OR “heterogeneous traffic*” OR “mix* traffic flow”)) AND NOT EID (2-s2.0-85113502346 OR 2-s2.0-85110113635 OR 2-s2.0-85111559787 OR 2-s2.0-85105690111 OR 2-s2.0-85105304706 OR 2-s2.0-85102260094 OR 2-s2.0-8510292210 OR 2-s2.0-85120523634 OR 2-s2.0-85112662827 OR 2-s2.0-85101020669 OR 2-s2.0-85099345593 OR 2-s2.0-85092091552 OR 2-s2.0-85106318730 OR 2-s2.0-85097173824 OR 2-s2.0-85093119962 OR 2-s2.0-85086721434 OR 2-s2.0-85076820374 OR 2-s2.0-85074453871 OR 2-s2.0-85069684311 OR 2-s2.0-85031293900 OR 2-s2.0-85106204730) AND (LIMIT-TO (DOCTYPE, “ar”) OR LIMIT-TO (DOCTYPE, “cp”)) AND (EXCLUDE (PUBYEAR, 2022)) | 374 |
| Sr. No. | Reference | EID | Reason of Exclusion |
|---|---|---|---|
| 1 | [80] | 2-s2.0-85113502346 | Pedestrians’ trajectories at midblock—jaywalkers |
| 2 | [81] | 2-s2.0-85110113635 | Interaction between wheelchairs, pedestrians and AVs |
| 3 | [82] | 2-s2.0-85111559787 | Design to deploy AVs to carry a first aid robot |
| 4 | [83] | 2-s2.0-85105690111 | Policy study providing a framework to differentiate between installation and usage of AVs |
| 5 | [84] | 2-s2.0-85105304706 | AV-pedestrian interactions |
| 6 | [85] | 2-s2.0-85102260094 | Survey paper |
| 7 | [86] | 2-s2.0-85102922104 | Primarily not focused on AVs |
| 8 | [87] | 2-s2.0-85120523634 | Calibration method for existing traffic |
| 9 | [88] | 2-s2.0-85112662827 | AVs interactions with cyclists explored |
| 10 | [89] | 2-s2.0-85101020669 | Modeling pedestrians road crossing |
| 11 | [90] | 2-s2.0-85099345593 | Review paper |
| 12 | [91] | 2-s2.0-85092091552 | Pedestrian path prediction at signalized crosswalk |
| 13 | [92] | 2-s2.0-85106318730 | Key focus was connected buses and energy consumption |
| 14 | [93] | 2-s2.0-85097173824 | Survey-based study about user perceptions |
| 15 | [94] | 2-s2.0-85093119962 | User perception based on autonomous shuttle rides—user survey |
| 16 | [95] | 2-s2.0-85086721434 | User perception based on autonomous shuttle rides—user survey |
| 17 | [96] | 2-s2.0-85076820374 | Estimating pedestrian’s waiting time at unsignalized mid-block crosswalks |
| 18 | [97] | 2-s2.0-85074453871 | Pedestrians’ perspective |
| 19 | [98] | 2-s2.0-85069684311 | Vehicle–pedestrian encountering |
| 20 | [99] | 2-s2.0-85031293900 | Review paper discussing future perspectives of AVs |
| 21 | [100] | 2-s2.0-85106204730 | Prior focus was communication from in-vehicle and from infrastructure signage. |
| Year | TP | % | NCP | TC | C/P | C/CP | h | g |
|---|---|---|---|---|---|---|---|---|
| 2021 | 126 | 33.69% | 52 | 198 | 1.57 | 3.81 | 6 | 11 |
| 2020 | 109 | 29.14% | 75 | 484 | 4.44 | 6.45 | 12 | 15 |
| 2019 | 65 | 17.38% | 58 | 704 | 10.83 | 12.14 | 13 | 24 |
| 2018 | 36 | 9.63% | 34 | 608 | 16.89 | 17.88 | 12 | 24 |
| 2017 | 16 | 4.28% | 14 | 306 | 19.13 | 21.86 | 8 | 14 |
| 2016 | 11 | 2.94% | 11 | 391 | 35.55 | 35.55 | 7 | 11 |
| 2015 | 2 | 0.53% | 2 | 22 | 11.00 | 11.00 | 2 | 2 |
| 2014 | 1 | 0.27% | 1 | 1 | 1.00 | 1.00 | 1 | 1 |
| 2013 | 1 | 0.27% | 1 | 33 | 33.00 | 33.00 | 1 | 1 |
| 2012 | 4 | 1.07% | 3 | 17 | 4.25 | 5.67 | 2 | 3 |
| 2009 | 1 | 0.27% | 1 | 1 | 1.00 | 1.00 | 1 | 1 |
| 2000 | 1 | 0.27% | 1 | 42 | 42.00 | 42.00 | 1 | 1 |
| 1999 | 1 | 0.27% | 1 | 2 | 2.00 | 2.00 | 1 | 1 |
| No. | TC | Author | Title | Type | Source | CPY |
|---|---|---|---|---|---|---|
| 1 | 162 | [53] | Autonomous vehicles and connected vehicle systems: Flow and operations considerations | Article | Transportation Science | 27 |
| 2 | 115 | [57] | A mixed traffic capacity analysis and lane management model for connected automated vehicles: A Markov chain method | Article | Transportation Research Part B: Methodological | 23 |
| 3 | 99 | [60] | Modeling connected and autonomous vehicles in heterogeneous traffic flow | Article | Physica A: Statistical Mechanics and its Applications | 24.75 |
| 4 | 97 | [64] | TrafficPredict: Trajectory prediction for heterogeneous traffic-agents | Conference Paper | Proceedings of the AAAI Conference on Artificial Intelligence | 32.33 |
| 5 | 85 | [70] | Optimal deployment of autonomous vehicle lanes with endogenous market penetration | Article | Transportation Research Part C: Emerging Technologies | 14.17 |
| 6 | 76 | [106] | What externally presented information do VRUs require when interacting with fully Automated Road Transport Systems in shared space? | Article | Accident Analysis and Prevention | 19 |
| 7 | 75 | [107] | Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles | Article | Transportation Research Part B: Methodological | 18.75 |
| 8 | 73 | [108] | Joint optimization of vehicle trajectories and intersection controllers with connected automated vehicles: Combined dynamic programming and shooting heuristic approach | Article | Transportation Research Part C: Emerging Technologies | 24.33 |
| 9 | 55 | [109] | Mixed-integer linear programming for optimal scheduling of autonomous vehicle intersection crossing | Article | IEEE Transactions on Intelligent Vehicles | 13.75 |
| 10 | 53 | [28] | Investigation of Automated Vehicle Effects on Driver’s Behavior and Traffic Performance | Conference Paper | Transportation Research Procedia | 8.83 |
| Rank | Source Title | TP | % | Publisher | NCP | TC | C/P |
|---|---|---|---|---|---|---|---|
| 1 | Transportation Research Part C Emerging Technologies | 31 | 8.29% | Elsevier Ltd. | 27 | 412 | 13.29 |
| 2 | IEEE Conference on Intelligent Transportation Systems Proceedings (ITSC) | 25 | 6.68% | IEEE Inc. | 13 | 104 | 4.16 |
| 3 | IEEE Transactions on Intelligent Transportation Systems | 20 | 5.35% | IEEE Inc. | 14 | 108 | 5.40 |
| 4 | Journal Of Advanced Transportation | 16 | 4.28% | Hindawi Limited | 11 | 75 | 4.69 |
| 5 | Physica A: Statistical Mechanics and Its Applications | 14 | 3.74% | Elsevier B.V. | 10 | 306 | 21.86 |
| 6 | IET Intelligent Transport Systems | 11 | 2.94% | Institution of Engineering and Technology | 8 | 48 | 4.36 |
| 7 | SAE Technical Papers | 11 | 2.94% | SAE International | 5 | 14 | 1.27 |
| 8 | Transportation Research Record | 10 | 2.67% | SAGE Publications Ltd. | 9 | 79 | 7.90 |
| 9 | IEEE Access | 9 | 2.41% | IEEE Inc. | 8 | 55 | 6.11 |
| 10 | Transportation Research Part B: Methodological | 8 | 2.14% | Elsevier Ltd. | 7 | 331 | 41.38 |
| 11 | Transportation Research Procedia | 8 | 2.14% | Elsevier B.V. | 7 | 83 | 10.38 |
| Author Name (Scopus ID) | TP | % | Affiliation | Country | NCP | TC | C/P | C/CP | h | g |
|---|---|---|---|---|---|---|---|---|---|---|
| Ran, B. (7003397581) | 9 | 2.41% | Southeast University | China | 6 | 56 | 6.22 | 9.33 | 3 | 6 |
| Wang, H. (55883671300) | 9 | 2.41% | Southeast University | China | 6 | 59 | 6.56 | 9.83 | 4 | 6 |
| Li, K. (26643211100) | 7 | 1.87% | Tsinghua University | China | 6 | 39 | 5.57 | 6.50 | 3 | 6 |
| Wang, J. (57211026358) | 7 | 1.87% | Tsinghua University | China | 6 | 39 | 5.57 | 6.50 | 3 | 6 |
| Ahn, S. (7401989918) | 5 | 1.34% | University of Wisconsin–Madison | United States | 5 | 15 | 3.00 | 3.00 | 2 | 3 |
| Bouroche, M. (15134891000) | 5 | 1.34% | Trinity College Dublin | Ireland | 4 | 39 | 7.80 | 9.75 | 4 | 4 |
| Jiang, Y. (34876737100) | 5 | 1.34% | Southwest Jiaotong University | China | 3 | 65 | 13.00 | 21.67 | 3 | 3 |
| Li, X. (57192545155) | 5 | 1.34% | University of South Florida | United States | 5 | 252 | 50.40 | 50.40 | 4 | 5 |
| Shao, Y. (57188803628) | 5 | 1.34% | Oak Ridge National Laboratory | United States | 5 | 11 | 2.20 | 2.20 | 2 | 3 |
| Xu, Q. (57199199887) | 5 | 1.34% | Tsinghua University | China | 4 | 14 | 2.80 | 3.50 | 2 | 3 |
| Yao, Z. (57190090062) | 5 | 1.34% | Southwest Jiaotong University | China | 3 | 65 | 13.00 | 21.67 | 3 | 3 |
| van Arem, B. (6602784888) | 5 | 1.34% | Delft University of Technology | The Netherlands | 3 | 29 | 5.80 | 9.67 | 2 | 3 |
| Rank | Institution | TP | Country | TC | C/P | C/CP | Authors of MCP | TC of MCP |
|---|---|---|---|---|---|---|---|---|
| 1 | Southeast University | 27 | China | 94 | 3.48 | 6.27 | [72] | 22 |
| 2 | Tsinghua University | 21 | China | 187 | 8.90 | 11.00 | [70] | 85 |
| 3 | Ministry of Education China | 18 | China | 71 | 3.94 | 5.92 | [61] | 17 |
| 4 | University of Wisconsin–Madison | 17 | United States | 81 | 4.76 | 6.75 | [111] | 34 |
| 5 | Tongji University | 17 | China | 63 | 3.71 | 5.73 | [112] | 25 |
| 6 | Southwest Jiaotong University | 14 | China | 136 | 9.71 | 12.36 | [111] | 34 |
| 7 | Chang’an University | 13 | China | 76 | 5.85 | 7.60 | [113] | 18 |
| 8 | Clemson University | 10 | United States | 110 | 11.00 | 18.33 | [109] | 55 |
| 9 | University of South Florida, Tampa | 9 | United States | 149 | 16.56 | 21.29 | [108] | 73 |
| 10 | Zhejiang University | 8 | China | 137 | 17.13 | 22.83 | [70] | 85 |
| Country | TP | % | NCP | TC | C/P | C/CP | h | g |
|---|---|---|---|---|---|---|---|---|
| United States | 148 | 39.6% | 113 | 1470 | 9.93 | 13.01 | 17 | 34 |
| China | 146 | 39.0% | 86 | 866 | 5.93 | 10.07 | 16 | 24 |
| Germany | 34 | 9.1% | 23 | 252 | 7.41 | 10.96 | 6 | 15 |
| Japan | 15 | 4.0% | 12 | 283 | 18.87 | 23.58 | 7 | 12 |
| United Kingdom | 14 | 3.7% | 11 | 167 | 11.93 | 15.18 | 6 | 11 |
| Netherlands | 12 | 3.2% | 11 | 91 | 7.58 | 8.27 | 6 | 9 |
| Italy | 9 | 2.4% | 8 | 71 | 7.89 | 8.88 | 5 | 8 |
| Sweden | 8 | 2.1% | 6 | 84 | 10.50 | 14.00 | 4 | 6 |
| Spain | 7 | 1.9% | 4 | 18 | 2.57 | 4.50 | 3 | 4 |
| Canada | 6 | 1.6% | 5 | 45 | 7.50 | 9.00 | 4 | 5 |
| France | 6 | 1.6% | 5 | 49 | 8.17 | 9.80 | 3 | 5 |
| Ireland | 6 | 1.6% | 5 | 44 | 7.33 | 8.80 | 4 | 5 |
| Singapore | 6 | 1.6% | 5 | 83 | 13.83 | 16.60 | 3 | 5 |
| South Korea | 6 | 1.6% | 5 | 32 | 5.33 | 6.40 | 3 | 5 |
| Australia | 5 | 1.3% | 4 | 101 | 20.20 | 25.25 | 4 | 4 |
| Rank | Based on Occurrence Frequency | Rank | Based on Relevance Score | ||||
|---|---|---|---|---|---|---|---|
| Term | Occurrence | Relevance Score | Term | Occurrence | Relevance Score | ||
| 1 | Traffic flow | 99 | 0.53 | 1 | Mixed traffic situation | 12 | 3.45 |
| 2 | Mixed traffic flow | 88 | 0.83 | 2 | Cooperative adaptive cruise control | 18 | 2.17 |
| 3 | CAVs | 86 | 0.33 | 3 | Cellular automata | 11 | 2.07 |
| 4 | Capacity | 52 | 0.54 | 4 | Numerical simulation | 31 | 1.9 |
| 5 | Interaction | 50 | 0.84 | 5 | Situation | 42 | 1.86 |
| 6 | Mixed traffic environment | 49 | 0.52 | 6 | Mixed traffic scenario | 26 | 1.83 |
| 7 | Stability | 48 | 1.13 | 7 | Road capacity | 17 | 1.79 |
| 8 | Intersection | 47 | 0.44 | 8 | Automated driving | 27 | 1.58 |
| 9 | Driver | 46 | 0.94 | 9 | Simulation study | 15 | 1.56 |
| 10 | Delay | 43 | 0.56 | 10 | Adaptive cruise control | 19 | 1.54 |
| Time Frame | Notable Keywords | Research Front |
|---|---|---|
| 1999–2017 | Autonomous vehicles, controllers, transportation system, algorithms | Pre-Development |
| 2017–2020 | Autonomous vehicles, traffic control, traffic situation, human–machine interface, intelligent systems | Development |
| 2021 | Mixed traffic flow, autonomous vehicles, heterogeneous traffic, traffic management, urban transportation | Deployment |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azam, M.; Hassan, S.A.; Che Puan, O. Autonomous Vehicles in Mixed Traffic Conditions—A Bibliometric Analysis. Sustainability 2022, 14, 10743. https://doi.org/10.3390/su141710743
Azam M, Hassan SA, Che Puan O. Autonomous Vehicles in Mixed Traffic Conditions—A Bibliometric Analysis. Sustainability. 2022; 14(17):10743. https://doi.org/10.3390/su141710743
Chicago/Turabian StyleAzam, Muhammad, Sitti Asmah Hassan, and Othman Che Puan. 2022. "Autonomous Vehicles in Mixed Traffic Conditions—A Bibliometric Analysis" Sustainability 14, no. 17: 10743. https://doi.org/10.3390/su141710743
APA StyleAzam, M., Hassan, S. A., & Che Puan, O. (2022). Autonomous Vehicles in Mixed Traffic Conditions—A Bibliometric Analysis. Sustainability, 14(17), 10743. https://doi.org/10.3390/su141710743