
Safety Analysis of Merging Vehicles Based on the Speed Difference between on-Ramp and Following Mainstream Vehicles Using NGSIM Data



Abstract
:1. Introduction
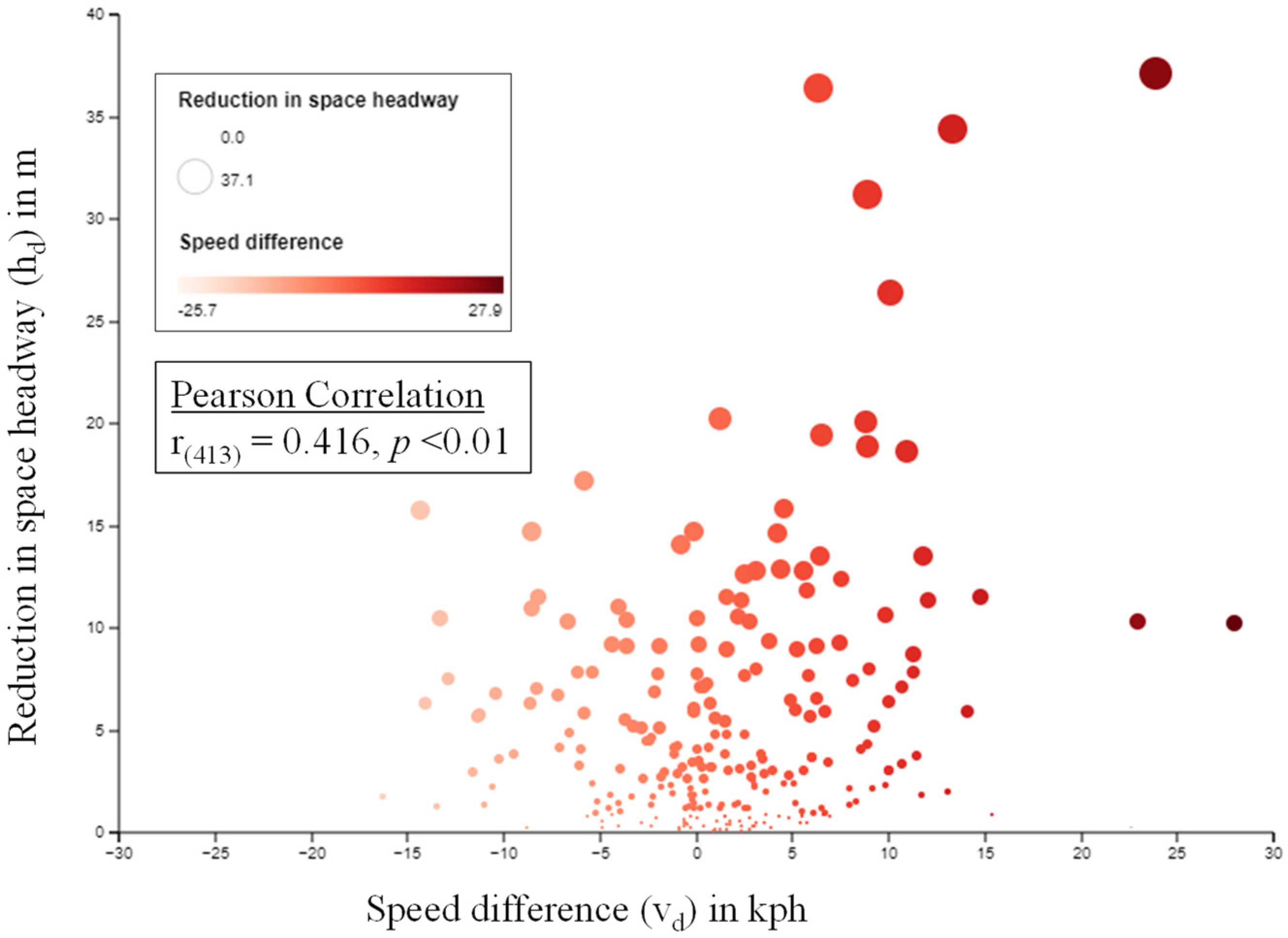
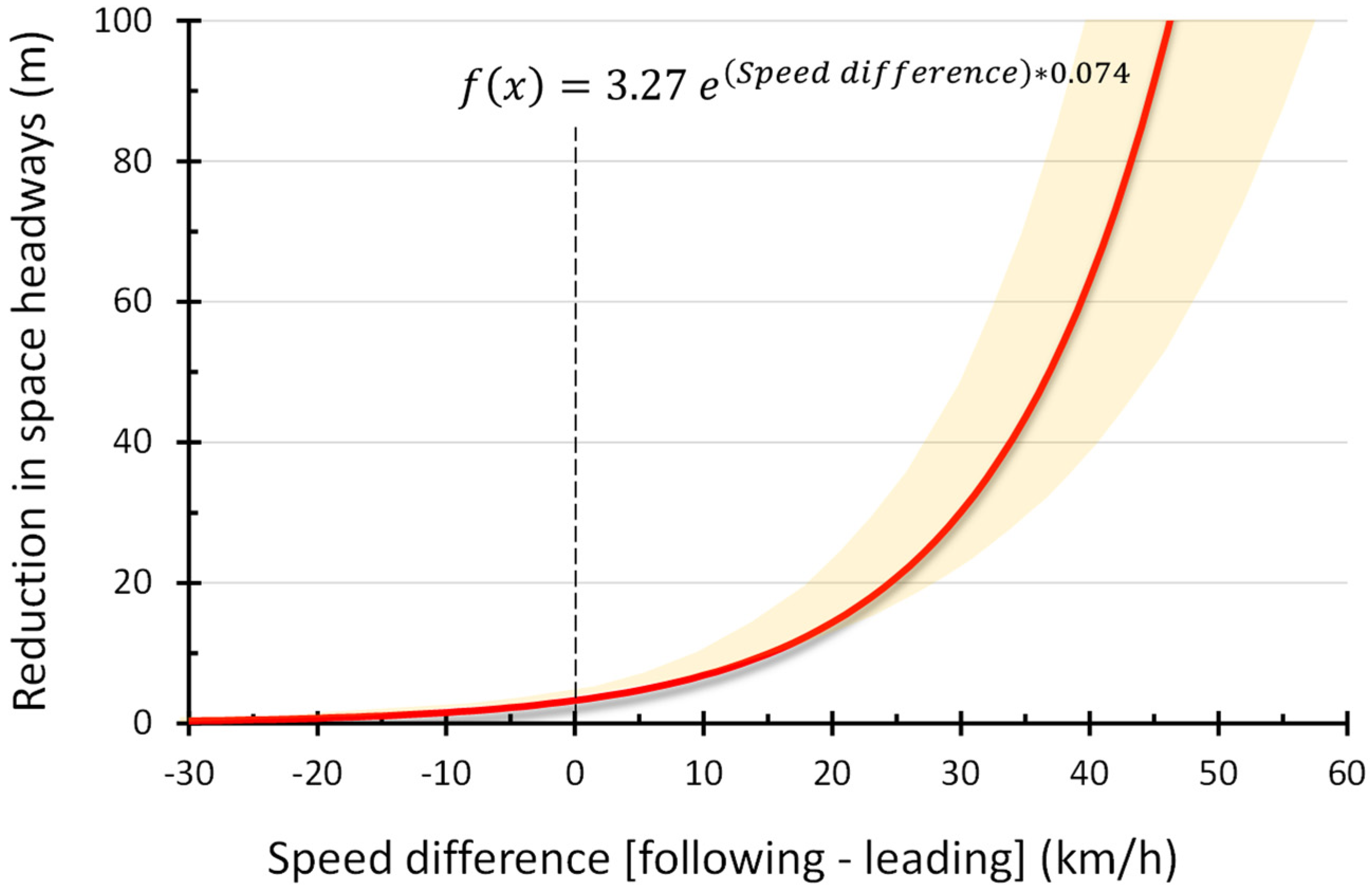
- The higher the speed difference between the following and merging vehicle, the greater the reduction in space headway would be.
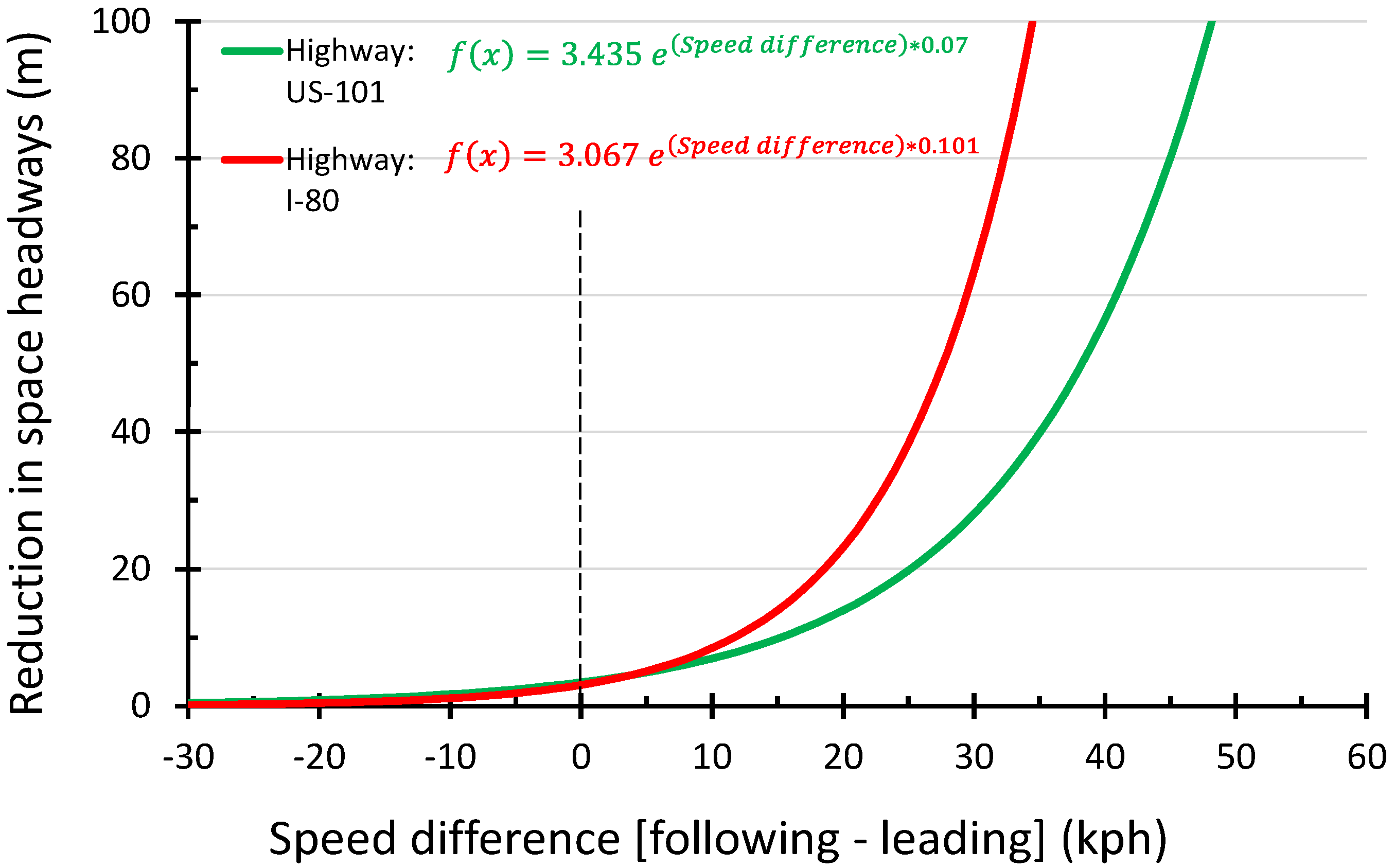
- Space headway reduction is higher for highways without an auxiliary lane.
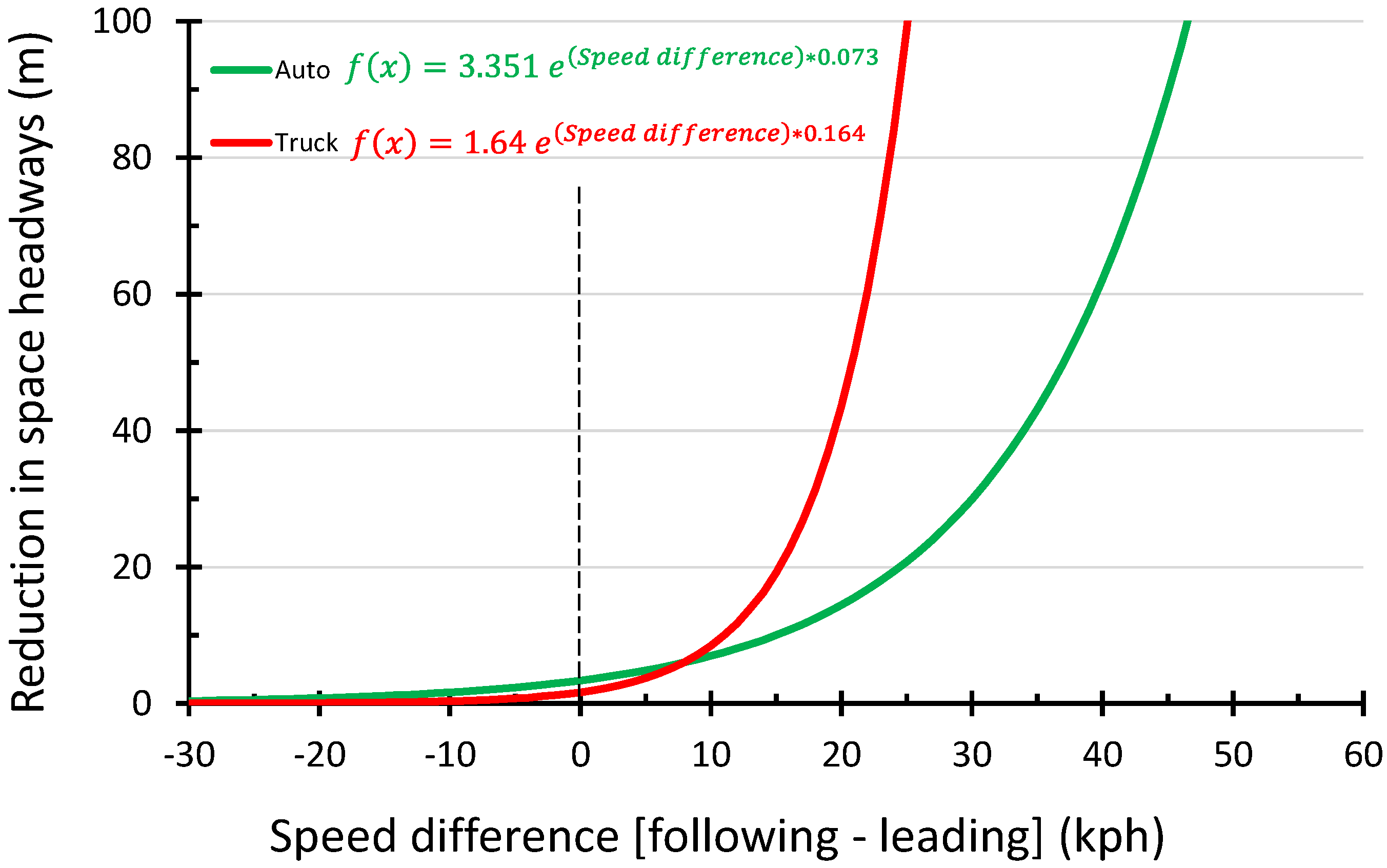
- Space headway reduction is higher if the following vehicle is a truck.
2. Materials and Methods
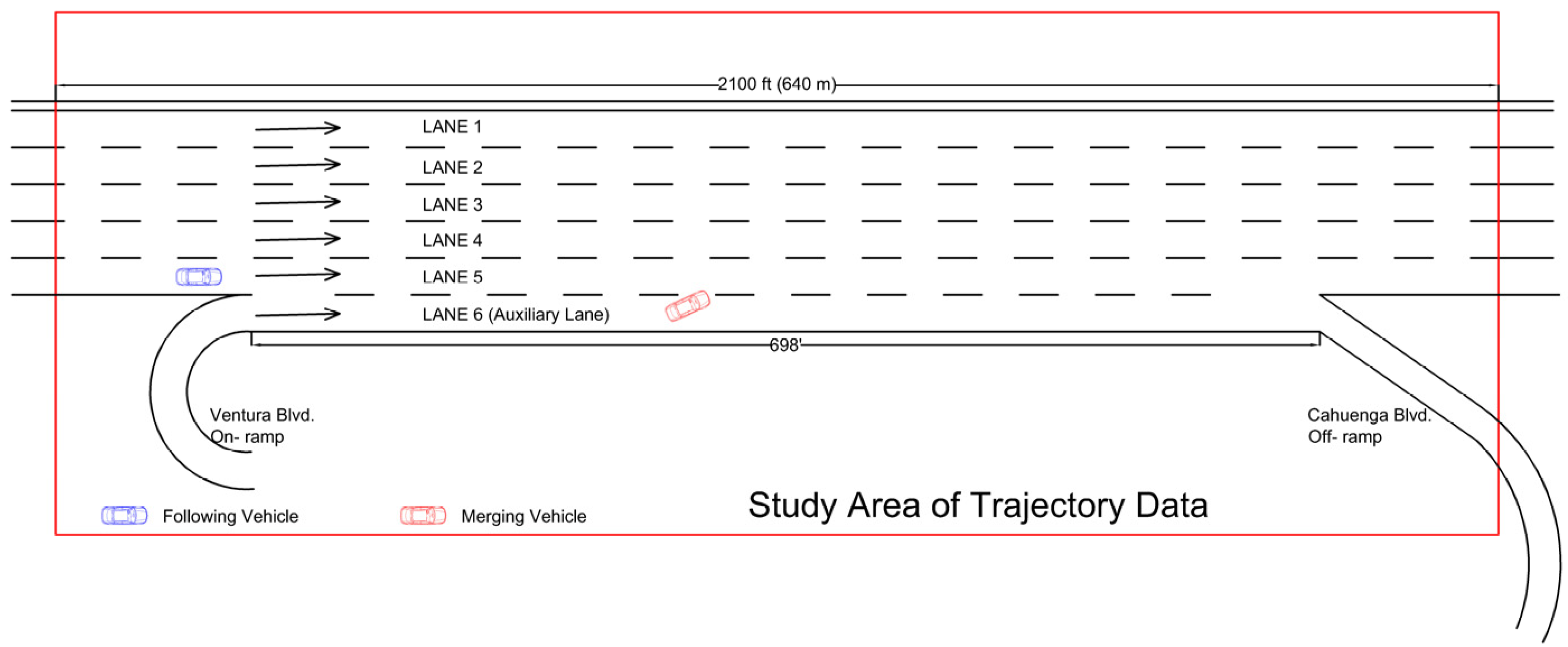
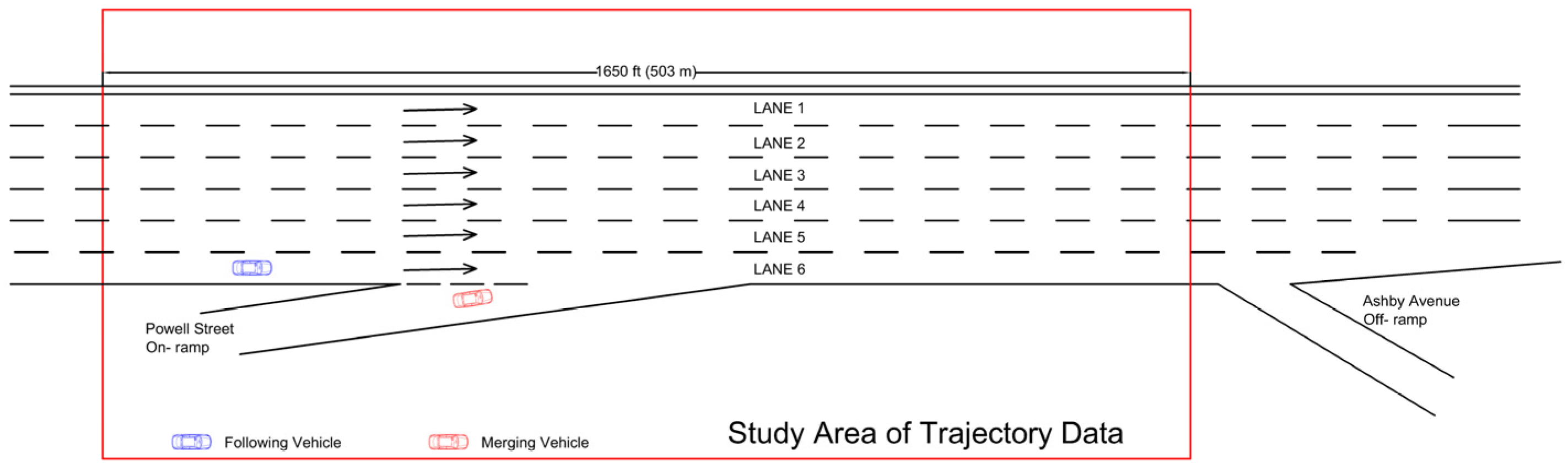
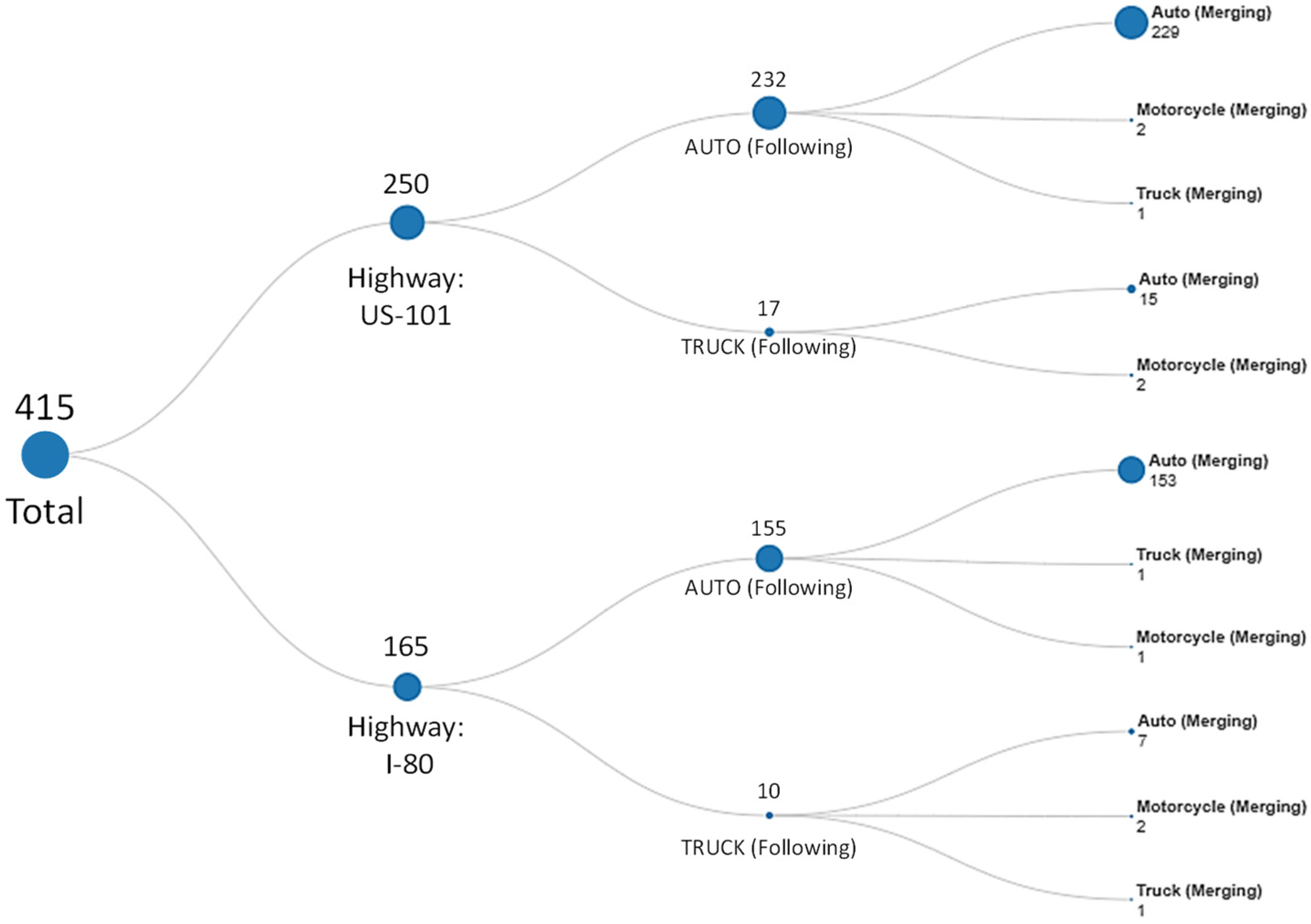
2.1. Dataset
2.2. Features Selection and Data Extraction
2.3. Statistical Analysis
3. Results
3.1. Descriptive Statistics and Correlation Tests
3.2. Main Exponential Regression Model Considering the Overall Interactions
3.3. Highway
3.4. Following Class
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute Label | Attribute Definition |
|---|---|
| Vehicle_ID | A unique vehicle ID (integer) ascending by entry to the section |
| Frame_ID | Frame ID (integer) ascending by start time |
| Total_Frames | Total number of frames (integer) in which the vehicle appears in the data |
| Global_Time | Elapsed time in milliseconds (integer) since 1 January 1970 |
| Local_X | Lateral coordinate of the front center of the vehicle with respect to the left-most edge of the section in the driving direction (in feet) |
| Local_Y | Longitudinal coordinate of the front center of the vehicle with respect to the start of the section in traveling direction (in feet) |
| Global_X | X Coordinate for the front center of the vehicle based on CA State Plane III in NAD83 (in feet) |
| Global_Y | Y Coordinate for the front center of the vehicle based on CA State Plane III in NAD83 (in feet) |
| v_Length | Vehicle length (in feet) |
| v_Width | Vehicle width (in feet) |
| v_Class | Vehicle type (integer): 1—motorcycle; 2—auto; 3—truck |
| v_Vel | Vehicle instantaneous speed (feet/second) |
| v_Acc | Vehicle instantaneous acceleration (feet/second2) |
| Lane_ID | Current lane position of the vehicle (integer): 1 represents the farthest left lane, 5 represents the farthest right lane, 6 represents the auxiliary lane and 7 represents the on-ramp lane |
| Preceding | Vehicle ID of the lead vehicle in the same lane. “0” represents no lead vehicle in the study section in the same lane. |
| Following | Vehicle ID of the following vehicle in the same lane. “0” represents no following vehicle in the study section in the same lane |
| Space_Headway | The distance between the front center of a vehicle to the front center of the preceding vehicle (in feet) |
| Time_Headway | The temporal difference between the front center of a vehicle (at the speed of the vehicle) to the front center of the preceding vehicle (in seconds) |
References
- Garber, N.J.; Hoel, L.A. Traffic and Highway Engineering; Cengage Learning: Boston, MA, USA, 2019. [Google Scholar]
- Liu, R.; Hyman, G. Modelling motorway merge: The current practice in the UK and towards establishing general principles. Transp. Policy 2012, 24, 199–210. [Google Scholar] [CrossRef]
- Yang, H.; Ozbay, K. Estimation of traffic conflict risk for merging vehicles on highway merge section. Transp. Res. Rec. 2011, 2236, 58–65. [Google Scholar] [CrossRef]
- Lee, S.E.; Llaneras, E.; Klauer, S.; Sudweeks, J. Analyses of Rear-End Crashes and Near-Crashes in the 100-Car Naturalistic Driving Study to Support Rear-Signaling Countermeasure Development; DOT HS: Washington, DC, USA, 2007; Volume 810, pp. 1–125. [Google Scholar]
- Khorashadi, A. Effect of Ramp Type and Geometry on Accidents; FHWA/CA/TE-98/13; The National Academies of Sciences: Washington, DC, USA, 1998. [Google Scholar]
- Wang, Z.; Chen, H.; Lu, J.J. Exploring impacts of factors contributing to injury severity at freeway diverge areas. Transp. Res. Rec. 2009, 2102, 43–52. [Google Scholar] [CrossRef]
- Ben-Yaacov, A.; Maltz, M.; Shinar, D. Effects of an in-vehicle collision avoidance warning system on short-and long-term driving performance. Hum. Factors 2002, 44, 335–342. [Google Scholar] [CrossRef]
- Taieb-Maimon, M.; Shinar, D. Minimum and comfortable driving headways: Reality versus perception. Hum. Factors 2001, 43, 159–172. [Google Scholar] [CrossRef]
- Yang, G.; Xu, H.; Wang, Z.; Tian, Z. Truck acceleration behavior study and acceleration lane length recommendations for metered on-ramps. Int. J. Transp. Sci. Technol. 2016, 5, 93–102. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.; Abdel-Aty, M. Analysis of crashes on freeway ramps by location of crash and presence of advisory speed signs. J. Transp. Saf. Secur. 2009, 1, 121–134. [Google Scholar] [CrossRef]
- Daamen, W.; Loot, M.; Hoogendoorn, S.P. Empirical analysis of merging behavior at freeway on-ramp. Transp. Res. Rec. 2010, 2188, 108–118. [Google Scholar] [CrossRef]
- Kondyli, A.; Elefteriadou, L. Driver behavior at freeway-ramp merging areas based on instrumented vehicle observations. Transp. Lett. 2012, 4, 129–142. [Google Scholar] [CrossRef]
- Chen, H.; Zhou, H.; Zhao, J.; Hsu, P. Safety performance evaluation of left-side off-ramps at freeway diverge areas. Accid. Anal. Prev. 2011, 43, 605–612. [Google Scholar] [CrossRef]
- Ale, G.B.; Varma, A.; Gage, B. Safety impacts of right-turn lanes at unsignalized intersections and driveways on two-lane roadways: Crash analysis. J. Transp. Eng. 2014, 140, 04013001. [Google Scholar] [CrossRef]
- Wu, C.; Yu, D.; Doherty, A.; Zhang, T.; Kust, L.; Luo, G. An investigation of perceived vehicle speed from a driver’s perspective. PLoS ONE 2017, 12, e0185347. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bokare, P.S.; Maurya, A.K. Acceleration-deceleration behaviour of various vehicle types. Transp. Res. Procedia 2017, 25, 4733–4749. [Google Scholar] [CrossRef]
- Ramireddy, S.; Ala, V.; Kvr, R.; Mehar, A. Acceleration and Deceleration Rates of Various Vehicle Categories at Signalized Intersections in Mixed Traffic Conditions. Period. Polytech. Transp. Eng. 2021, 49, 324–332. [Google Scholar] [CrossRef]
- U.S. Department of Transportation Federal Highway Administration. Next Generation Simulation (NGSIM) Vehicle Trajectories and Supporting Data. [Dataset]. Provided by ITS DataHub through Data.transportation.gov. 2016. Available online: https://data.transportation.gov/Automobiles/Next-Generation-Simulation-NGSIM-Vehicle-Trajector/8ect-6jqj (accessed on 6 November 2022).
- Lu, X.-Y.; Varaiya, P.; Horowitz, R. Fundamental diagram modelling and analysis based NGSIM data. IFAC Proc. Vol. 2009, 42, 367–374. [Google Scholar] [CrossRef] [Green Version]
- Jin, C.-J.; Knoop, V.; Li, D.; Meng, L.-Y.; Wang, H. Discretionary lane-changing behavior: Empirical validation for one realistic rule-based model. Transp. A Transp. Sci. 2019, 15, 244–262. [Google Scholar] [CrossRef] [Green Version]
- Park, M.; Jang, K.; Lee, J.; Yeo, H. Logistic regression model for discretionary lane changing under congested traffic. Transp. A Transp. Sci. 2015, 11, 333–344. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, H.; Tang, J.; Lee, J.; Meng, X. Driving angle prediction of lane changes based on extremely randomized decision trees considering the harmonic potential field method. Transp. A Transp. Sci. 2021, 18, 1601–1625. [Google Scholar] [CrossRef]
- Hao, H.; Ma, W.; Xu, H. A fuzzy logic-based multi-agent car-following model. Transp. Res. Part C Emerg. Technol. 2016, 69, 477–496. [Google Scholar] [CrossRef]
- Mo, Z.; Shi, R.; Di, X. A physics-informed deep learning paradigm for car-following models. Transp. Res. Part C Emerg. Technol. 2021, 130, 103240. [Google Scholar] [CrossRef]
- Nadimi, N.; Amiri, A.M.; Sadri, A. Introducing novel statistical-based method of screening and combining currently well-known surrogate safety measures. Transp. Lett. 2022, 14, 385–395. [Google Scholar] [CrossRef]
- Sharma, A.; Zheng, Z.; Bhaskar, A. A pattern recognition algorithm for assessing trajectory completeness. Transp. Res. Part C Emerg. Technol. 2018, 96, 432–457. [Google Scholar] [CrossRef]
- Hao, P.; Ban, X.; Guo, D.; Ji, Q. Cycle-by-cycle intersection queue length distribution estimation using sample travel times. Transp. Res. Part B Methodol. 2014, 68, 185–204. [Google Scholar] [CrossRef]
- Yang, S.; Chung, E. Driver response time of queuing vehicles at urban signalized intersections. Procedia-Soc. Behav. Sci. 2012, 43, 169–177. [Google Scholar] [CrossRef]
- Chen, X.; Li, L.; Zhang, Y. A Markov model for headway/spacing distribution of road traffic. IEEE Trans. Intell. Transp. Syst. 2010, 11, 773–785. [Google Scholar] [CrossRef]
- Kutner, M.; Nachtsheim, C.; Neter, J.; Li, W. Introduction to nonlinear regression and neural networks. In Applied Linear Statistical Models; McGraw-Hill: New York, NY, USA, 2005. [Google Scholar]
- Cook, R.D.; Weisberg, S. Confidence curves in nonlinear regression. J. Am. Stat. Assoc. 1990, 85, 544–551. [Google Scholar] [CrossRef]
- Akoglu, H. User’s guide to correlation coefficients. Turk. J. Emerg. Med. 2018, 18, 91–93. [Google Scholar] [CrossRef]
- Taylor, R. Interpretation of the correlation coefficient: A basic review. J. Diagn. Med. Sonogr. 1990, 6, 35–39. [Google Scholar] [CrossRef]
- Jiao, S.; Zhang, S.; Zhou, B.; Zhang, Z.; Xue, L. An extended car-following model considering the drivers’ characteristics under a V2V communication environment. Sustainability 2020, 12, 1552. [Google Scholar] [CrossRef] [Green Version]
- Ayres, T.J.; Li, L.; Schleuning, D.; Young, D. Preferred Time-Headway of Highway Drivers; IEEE: Piscataway, NJ, USA, 2001. [Google Scholar]
- Thomas, J.A.; Walton, D. Vehicle size and driver perceptions of safety. Int. J. Sustain. Transp. 2008, 2, 260–273. [Google Scholar] [CrossRef]
- Caro, S.; Cavallo, V.; Marendaz, C.; Boer, E.R.; Vienne, F. Can headway reduction in fog be explained by impaired perception of relative motion? Hum. Factors 2009, 51, 378–392. [Google Scholar] [CrossRef]
- Dowling, R.; Nevers, B.; Jia, A.; Skabardonis, A.; Krause, C.; Vasudevan, M. Performance benefits of connected vehicles for implementing speed harmonization. Transp. Res. Procedia 2016, 15, 459–470. [Google Scholar] [CrossRef] [Green Version]
- Jones, J.C.; Knopp, M.C.; Fitzpatrick, K.; Doctor, M.A.; Howard, C.E.; Laragan, G.M.; Rosenow, J.A.; Struve, B.A.; Thrasher, B.A.; Young, E.G. Freeway Geometric Design for Active Traffic Management in Europe; Federal Highway Administration: Washington, DC, USA, 2011. [Google Scholar]
- Mirshahi, M.; Obenberger, J.; Fuhs, C.A.; Howard, C.E.; Krammes, R.A.; Kuhn, B.T.; Mayhew, R.M.; Moore, M.A.; Sahebjam, K.; Stone, C.J.; et al. Active Traffic Management: The Next Step in Congestion Management; Federal Highway Administration: Washington, DC, USA, 2007. [Google Scholar]
- Reinolsmann, N.; Alhajyaseen, W.; Brijs, T.; Pirdavani, A.; Hussain, Q.; Brijs, K. Investigating the impact of a novel active gap metering signalization strategy on driver behavior at highway merging sections. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 42–57. [Google Scholar] [CrossRef]
- Qi, Y.; Chen, X.; Cheu, R.K.; Yu, L.; Wu, J.; Wang, Y.; Liu, H.; Liu, G.; Liu, Y. Design and Scope of Impact of Auxiliary Lanes: Technical report; Dept. of Transportation. Research and Technology Implementation Office: Austin, TX, USA, 2014. [Google Scholar]
- Reinolsmann, N.; Alhajyaseen, W.; Brijs, T.; Pirdavani, A.; Hussain, Q.; Brijs, K. Investigating the impact of dynamic merge control strategies on driving behavior on rural and urban expressways—A driving simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 469–484. [Google Scholar] [CrossRef] [Green Version]
- Ghods, A.H.; Saccomanno, F.; Guido, G. Effect of car/truck differential speed limits on two-lane highways safety operation using microscopic simulation. Procedia-Soc. Behav. Sci. 2012, 53, 833–840. [Google Scholar] [CrossRef]







| Highway Type and Statistics | Speed Difference (vd = vf − vm) | Reduction in Space Headway (hd = hmer − hmin) | |
|---|---|---|---|
| US-101 | Mean | −3.8 kph | 2.6 m |
| St. Dev | 6.7 | 0.4 | |
| T-stat | 8.9 | 8.7 | |
| p-value | <0.001 | <0.001 | |
| I-80 | Mean | 0.6 kph | 4.0 m |
| St. Dev | 7.6 | 5.9 | |
| T-stat | −0.9 | 8.6 | |
| p-value | 0.355 | <0.001 | |
| Total | Mean | −2.1 kph | 3.1 m |
| St. Dev | 7.4 | 5.3 | |
| T-stat | 5.7 | 12.1 | |
| p-value | <0.001 | <0.001 | |
| Parameter | Estimate | Std. Error | Lower Bound | Upper Bound |
|---|---|---|---|---|
| α | 3.270 | 0.249 | 2.781 | 3.758 |
| γ | 0.074 | 0.006 | 0.063 | 0.085 |
| R-squared = 0.209 | ||||
| Highway | Parameter | Estimate | Std. Error | Lower Bound | Upper Bound |
|---|---|---|---|---|---|
| US-101 | A | 3.067 | 0.330 | 2.417 | 3.718 |
| Γ | 0.101 | 0.017 | 0.069 | 0.134 | |
| R-squared = 0.123 | |||||
| I-80 | A | 3.435 | 0.407 | 2.632 | 4.239 |
| Γ | 0.070 | 0.008 | 0.055 | 0.085 | |
| R-squared = 0.276 | |||||
| Vehicle Class | Parameter | Estimate | Std. Error | Lower Bound | Upper Bound |
|---|---|---|---|---|---|
| Auto | α | 3.351 | 0.263 | 2.833 | 3.868 |
| γ | 0.073 | 0.006 | 0.061 | 0.084 | |
| R-squared = 0.203 | |||||
| Truck | α | 1.640 | 0.548 | 0.511 | 2.768 |
| γ | 0.164 | 0.072 | 0.016 | 0.312 | |
| R-squared = 0.361 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussain, Q.; Dias, C.; Al-Shahrani, A.; Hussain, I. Safety Analysis of Merging Vehicles Based on the Speed Difference between on-Ramp and Following Mainstream Vehicles Using NGSIM Data. Sustainability 2022, 14, 16436. https://doi.org/10.3390/su142416436
Hussain Q, Dias C, Al-Shahrani A, Hussain I. Safety Analysis of Merging Vehicles Based on the Speed Difference between on-Ramp and Following Mainstream Vehicles Using NGSIM Data. Sustainability. 2022; 14(24):16436. https://doi.org/10.3390/su142416436
Chicago/Turabian StyleHussain, Qinaat, Charitha Dias, Ali Al-Shahrani, and Intizar Hussain. 2022. "Safety Analysis of Merging Vehicles Based on the Speed Difference between on-Ramp and Following Mainstream Vehicles Using NGSIM Data" Sustainability 14, no. 24: 16436. https://doi.org/10.3390/su142416436
APA StyleHussain, Q., Dias, C., Al-Shahrani, A., & Hussain, I. (2022). Safety Analysis of Merging Vehicles Based on the Speed Difference between on-Ramp and Following Mainstream Vehicles Using NGSIM Data. Sustainability, 14(24), 16436. https://doi.org/10.3390/su142416436