
A Study on the Impacts of One-Strut Failure Scenarios for Deep Excavation in Loose to Medium-Dense Sand

Abstract
:1. Introduction
2. Materials and Methods
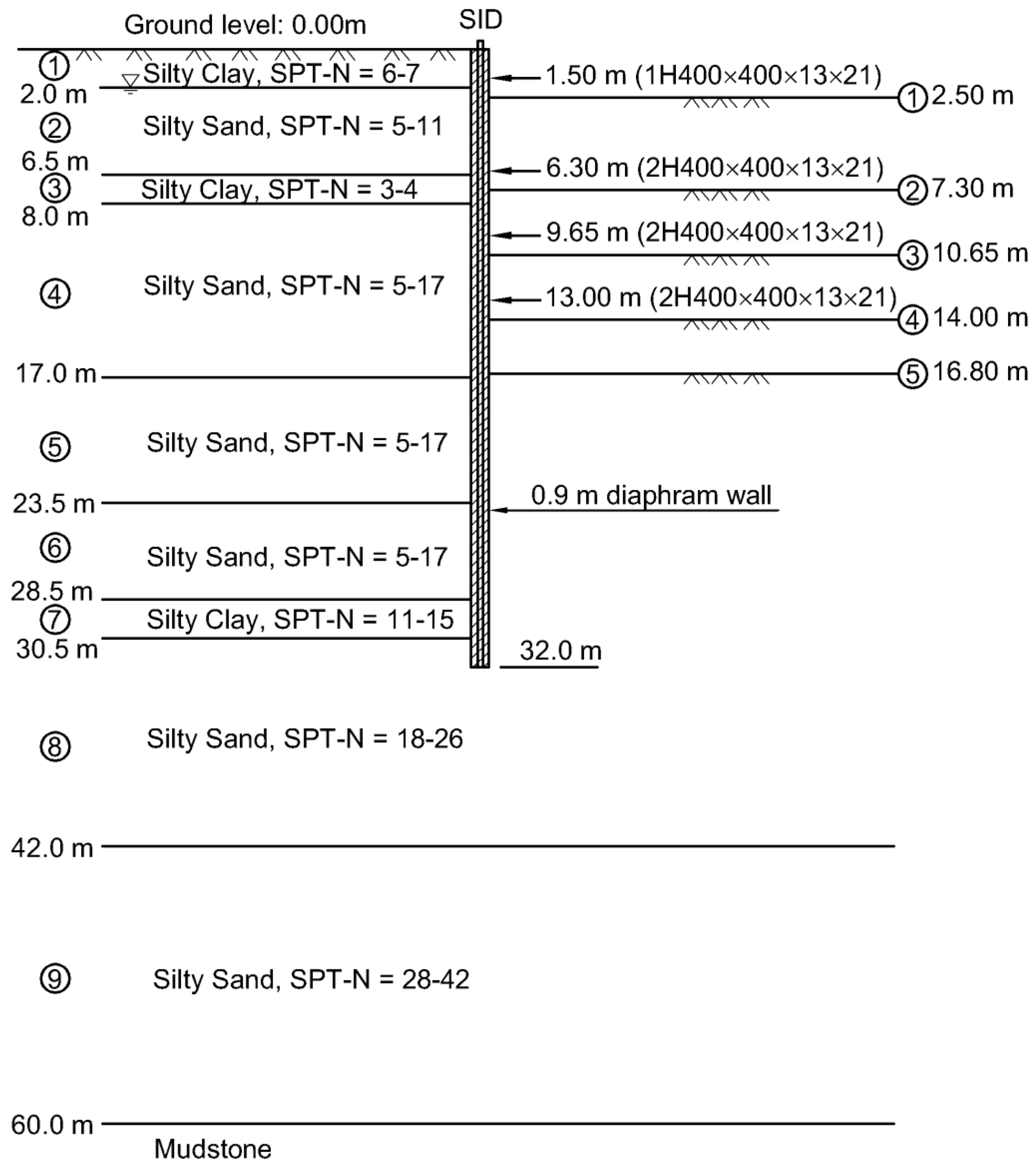
2.1. Project Background
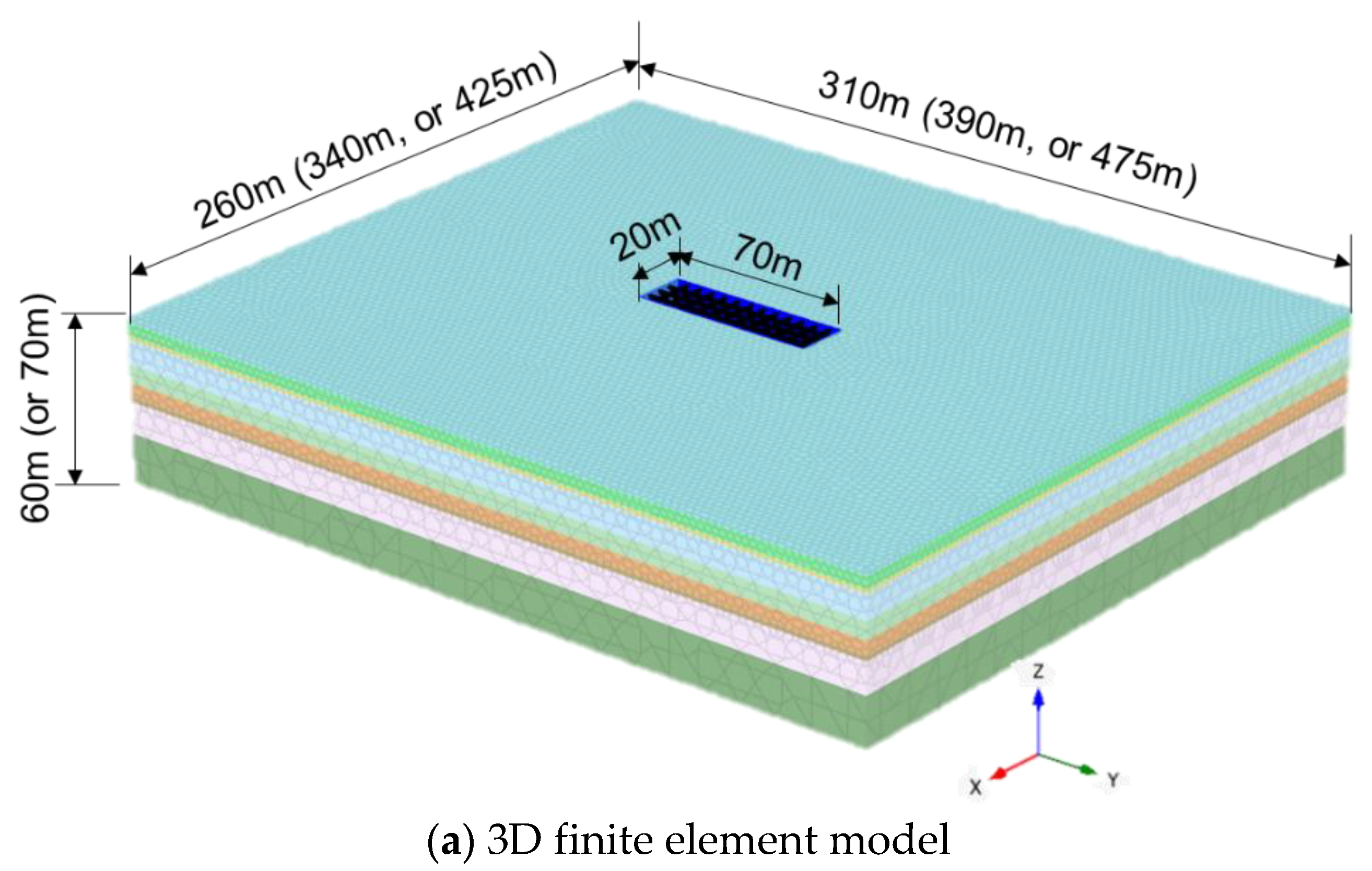
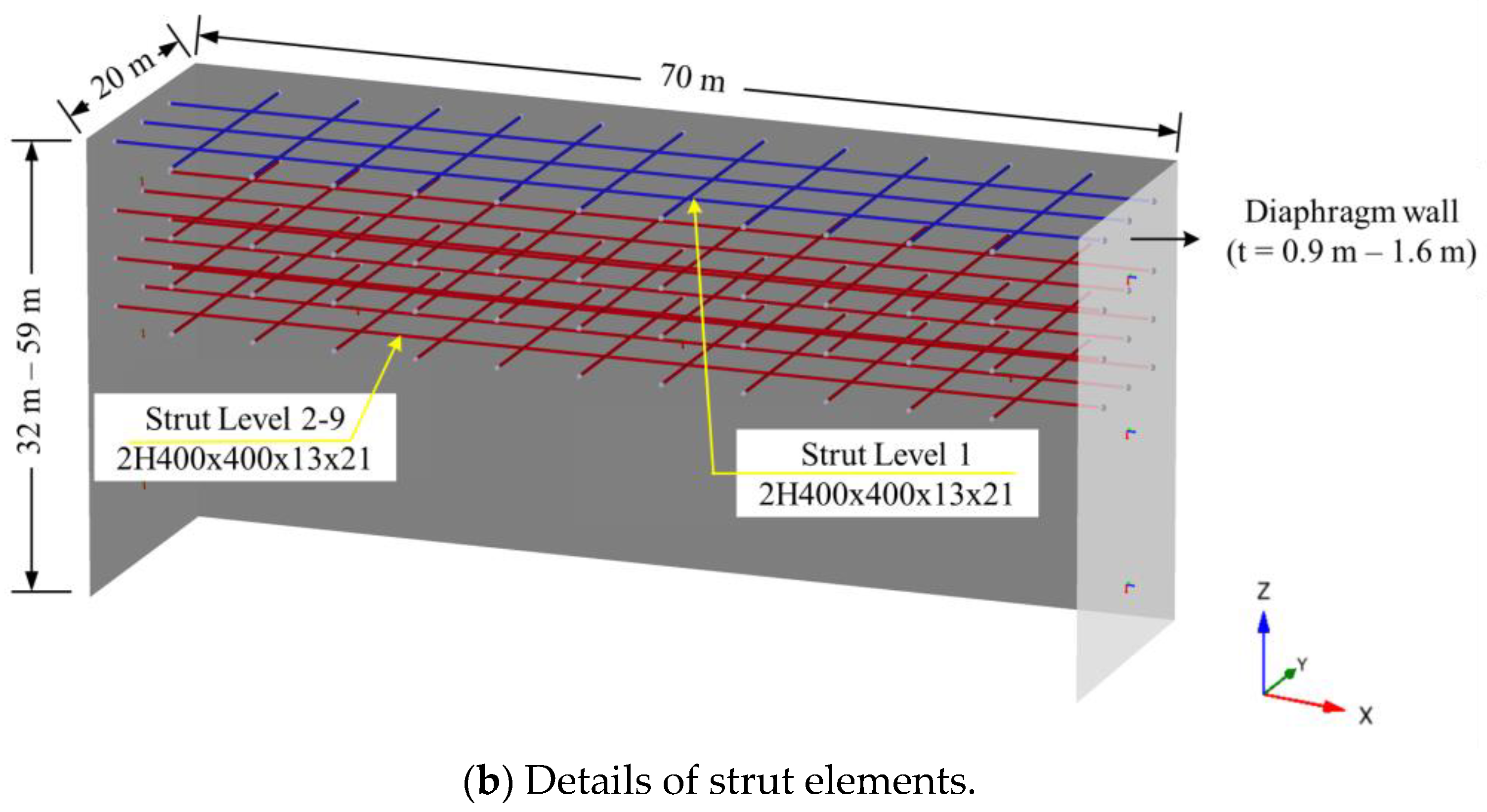
2.2. Proposed Case Studies and Methods
3. Results and Discussion
3.1. Critical Case of Strut Failure
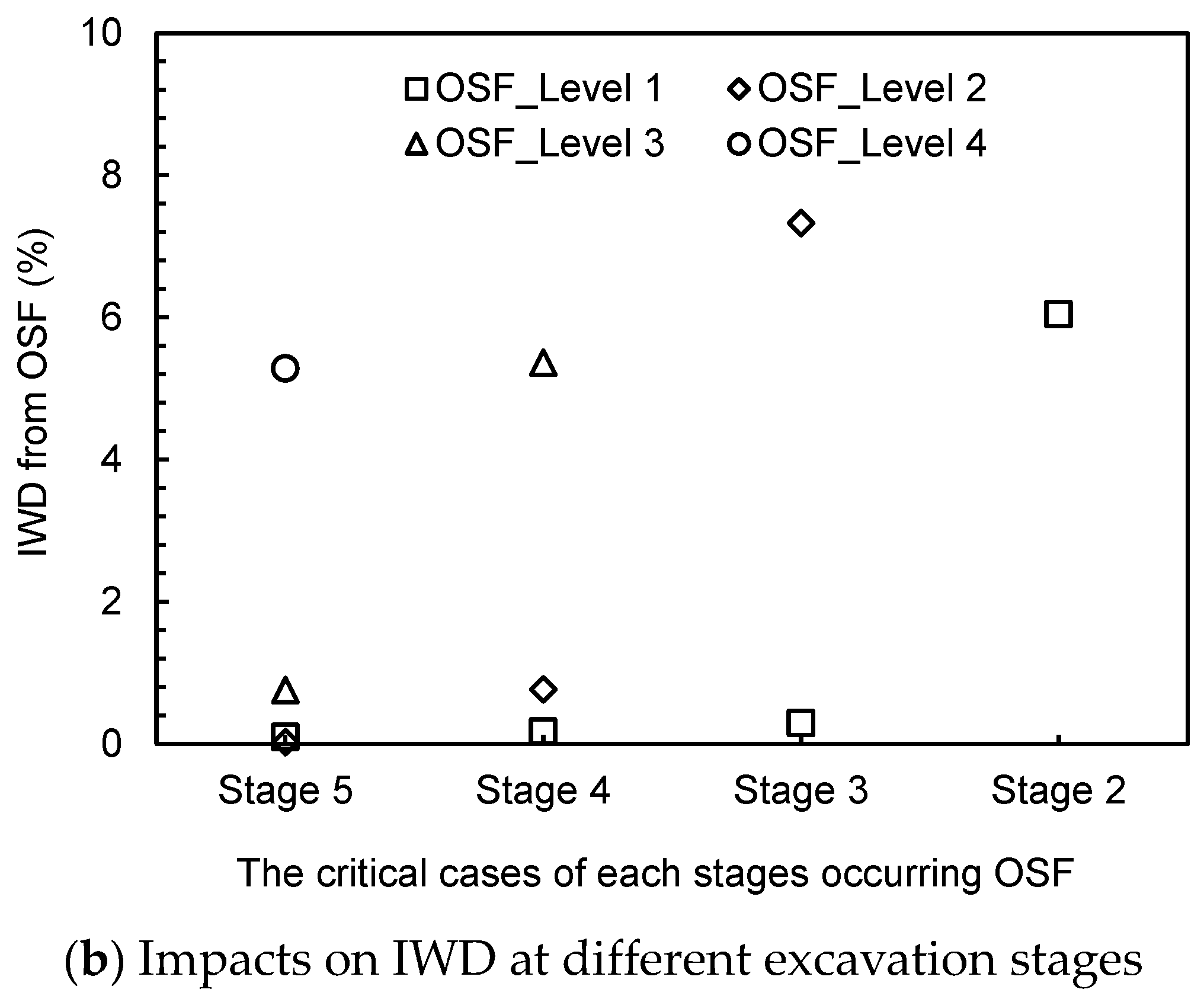
3.1.1. Increment of the Maximum Wall Movement
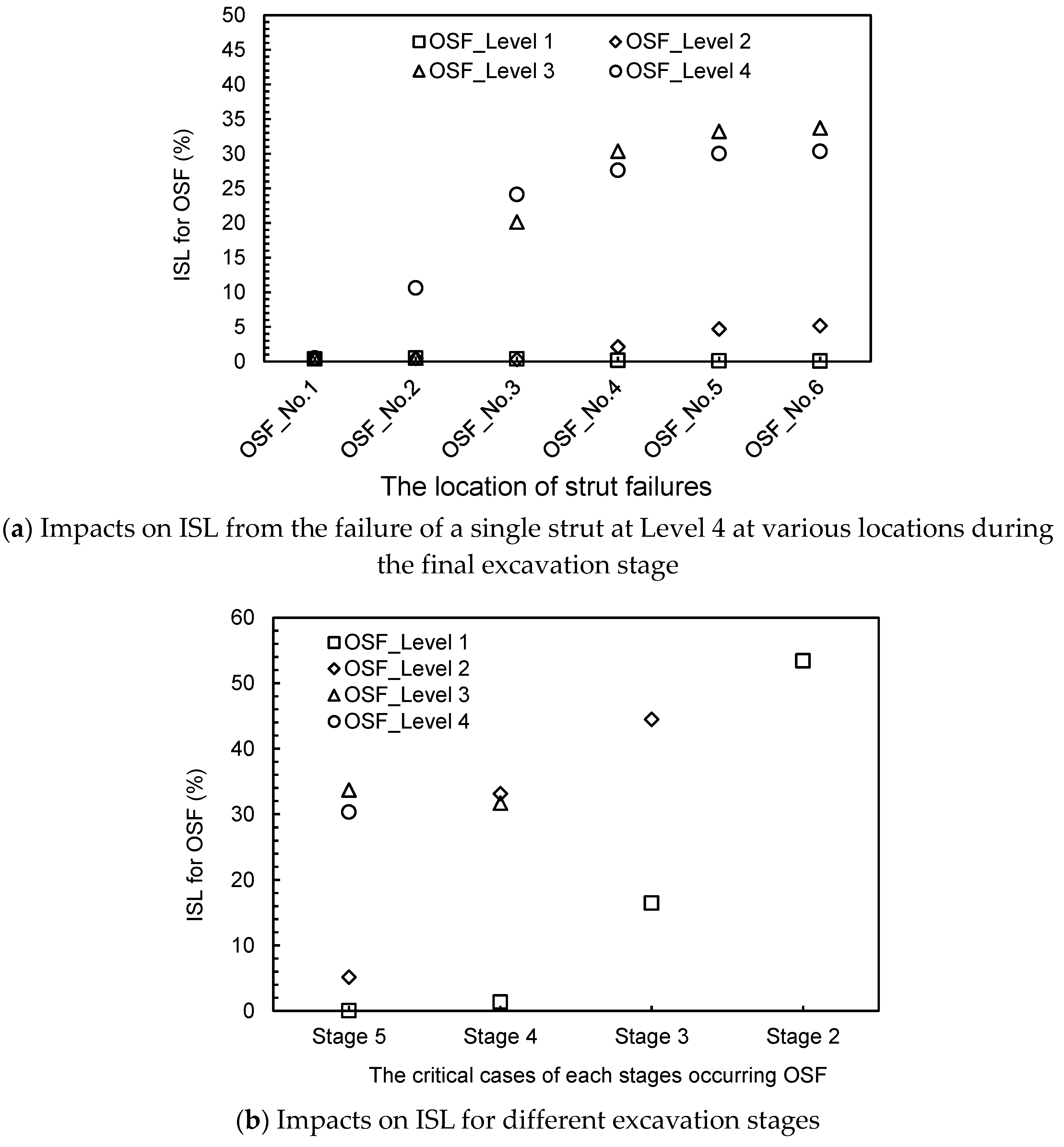
3.1.2. Increment in Axial Strut Loads
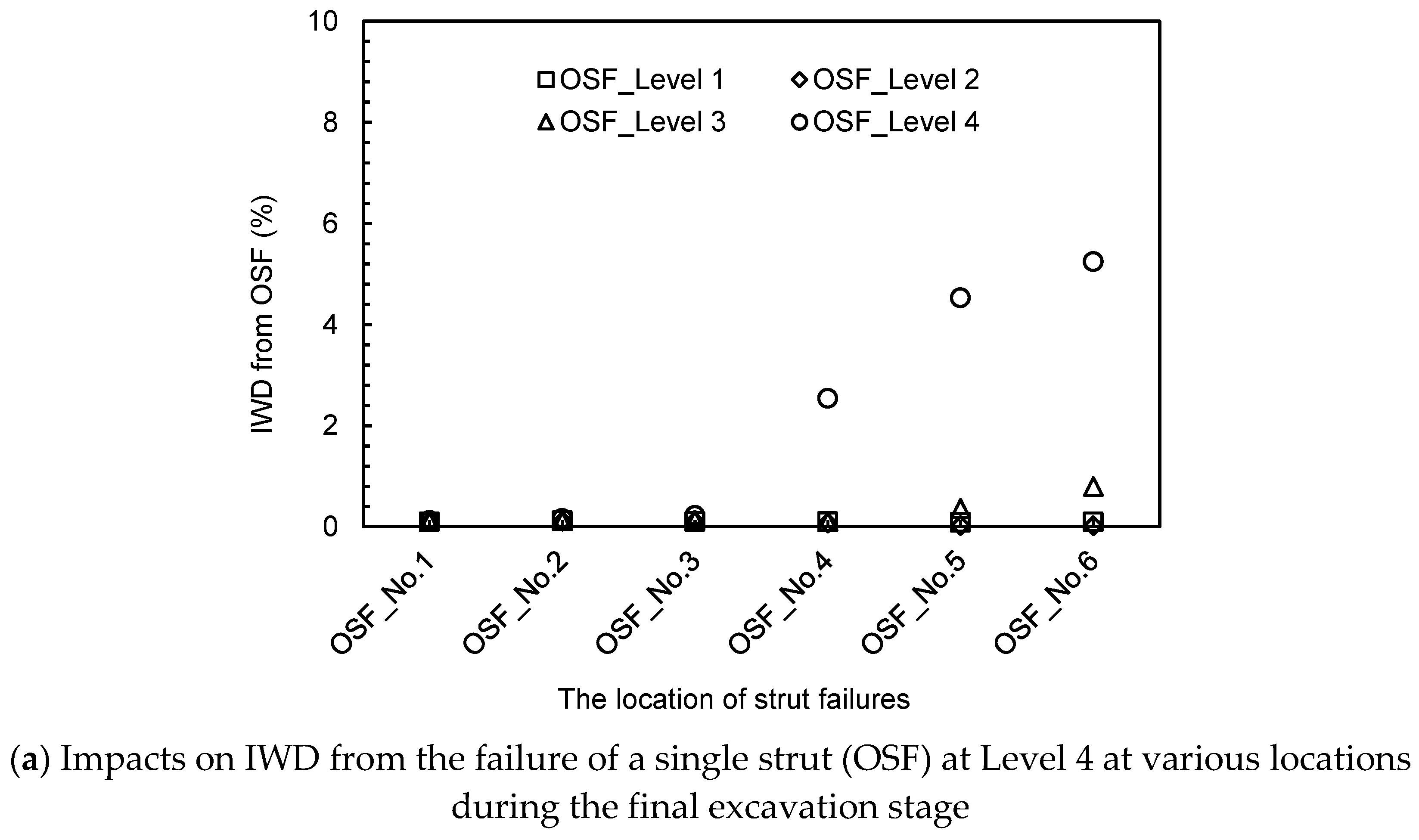
3.2. Influence of OSF on Load Transfers
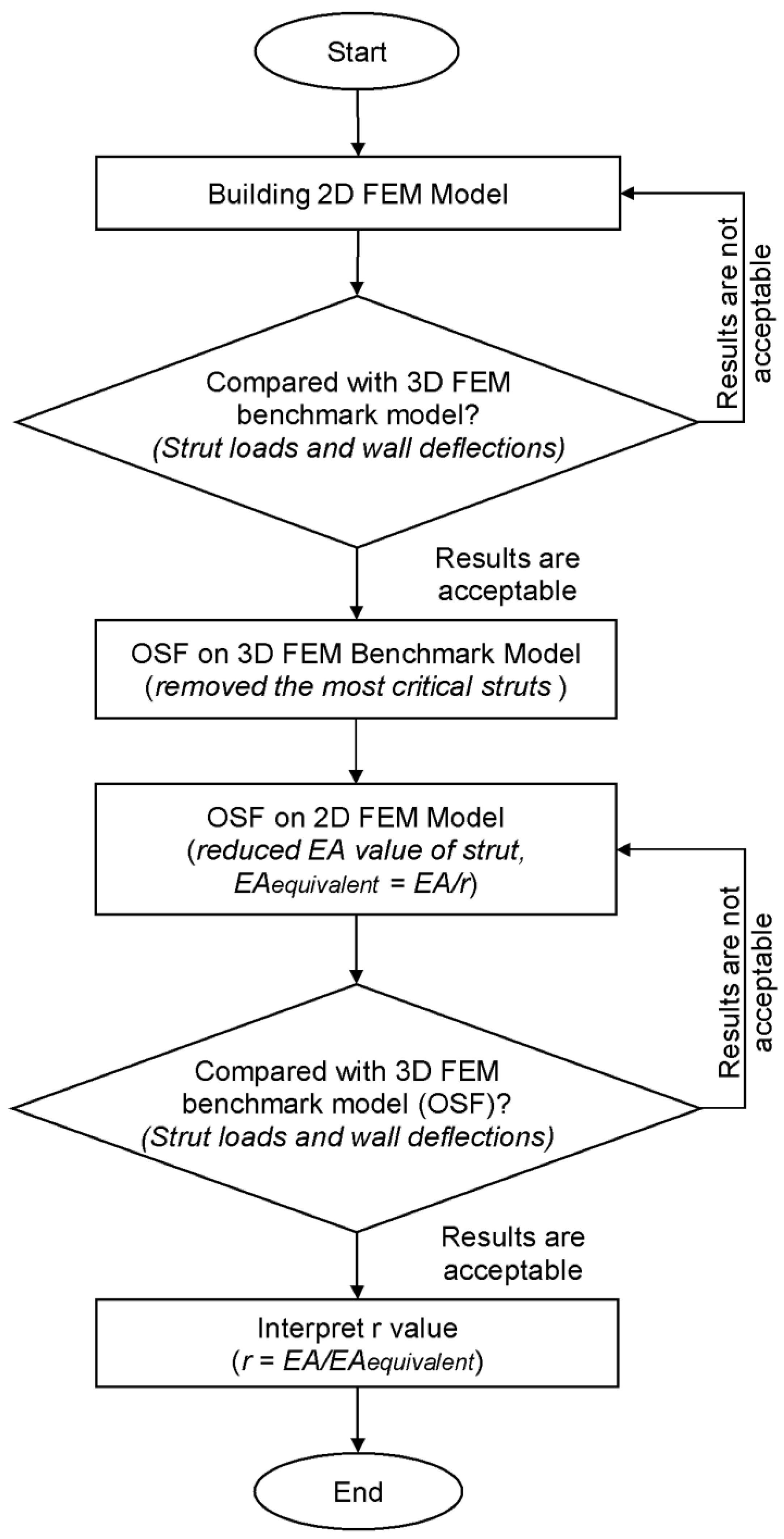
3.3. Conversion from 3D to 2D Analyses
3.3.1. Reduction Factor
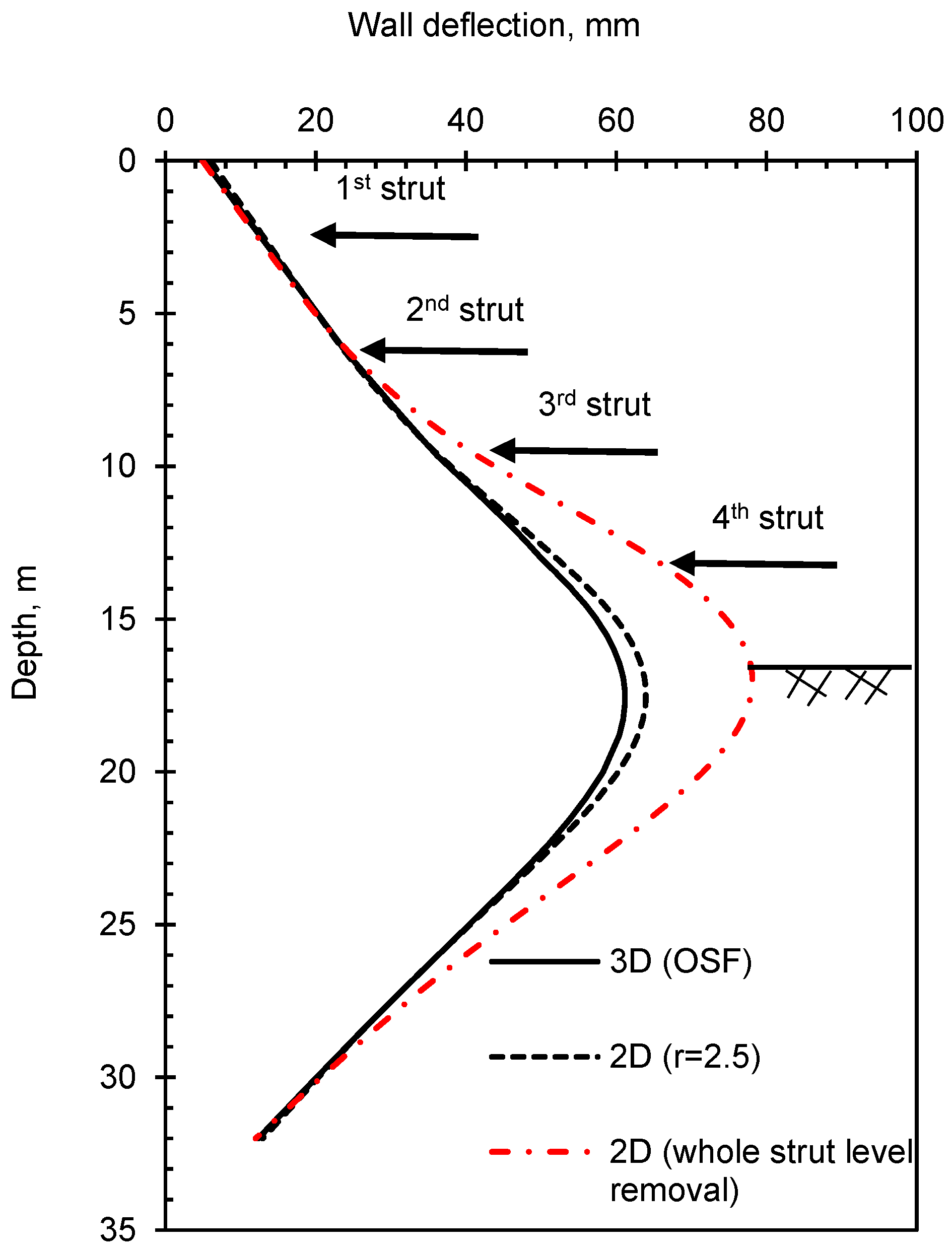
3.3.2. Validation of 2D Simulation with OSF
3.4. Novelty and Sustainability
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Whittle, A.; Davies, R. Nicoll Highway collapse: Evaluation of geotechnical factors affecting design of excavation support system. In Proceedings of the International Conference on Deep Excavations, Singapore, 28–30 June 2006; p. 30. [Google Scholar]
- Puller, M. Deep Excavations: A Practical Manual; Thomas Telford: Telford, UK, 2003. [Google Scholar]
- BS8002; Code of Practice for Earth Retaining Structures. British Standards Institution: London, UK, 1994.
- TR26. Technical Reference for Deep Excavation; Springer: Singapore, 2010. [Google Scholar]
- Suthiwarapirak, P. Design requirements and approval system of Singapore MRT project. In Proceedings of the 64th Annual Academic Lecture Meeting of the Civil Engineering Society, Fukuoka, Japan, September 2011; pp. 113–114. [Google Scholar]
- Goh, A.T.C.; Fan, Z.; Hanlong, L.; Wengang, Z.; Dong, Z. Numerical Analysis on Strut Responses Due to One-Strut Failure for Braced Excavation in Clays. In Proceedings of the 2nd International Symposium on Asia Urban GeoEngineering, Changsha, China, 24–27 November 2017; Springer: Singapore, 2018; pp. 560–574. [Google Scholar] [CrossRef]
- Phan, H.K.; Hsiung, B.C.B.; Huang, J. Behaviours and mechanism analysis of deep excavation in sand caused by one-strut failure. In Proceedings of the 16th Asian Regional Conference on Soil Mechanics and Geotechnical Engineering, Taipei, Taiwan, 14–18 October 2019; pp. 1–5. [Google Scholar]
- Choosrithong, K.; Schweiger, H.F. Numerical investigation of sequential strut failure on performance of deep excavations in soft soil. Int. J. Geomech. 2020, 20, 04020063. [Google Scholar] [CrossRef]
- Pong, K.; Foo, S.; Chinnaswamy, C.; Ng, C.; Chow, W. Design considerations for one-strut failure according to TR26–a practical approach for practising engineers. IES J. Part A Civ. Struct. Eng. 2012, 5, 166–180. [Google Scholar] [CrossRef]
- Liu, J.; Wu, S.; Wang, L.; Zhou, X. Local Failure and Reliability Analysis of Horizontal Struts in Deep Excavation Based on Redundancy Theory. In Hydraulic and Civil Engineering Technology VI, Proceedings of the 6th International Technical Conference on Frontiers of HCET, Sanya, China, 28–29 August 2021; IOS Press: Amsterdam, The Netherlands, 2021; pp. 356–366. [Google Scholar]
- Hsiung, B.C.B.; Yang, K.-H.; Aila, W.; Hung, C. Three-dimensional effects of a deep excavation on wall deflections in loose to medium dense sands. J. Comput. Geotech. 2016, 80, 138–151. [Google Scholar] [CrossRef]
- Hsiung, B.C.B. Observations of the ground and structural behaviours induced by a deep excavation in loose sands. J. Acta Geotech. 2019, 15, 1577–1593. [Google Scholar] [CrossRef]
- Ou, C.Y. Deep Excavation: Theory and Practice; Taylor & Francis Group: London, UK, 2006. [Google Scholar] [CrossRef]
- Hsiung, B.C.B.; Phan, H.K. Exploration of maximum wall deflection and stability for deep excavation in loose to medium-dense sand. J. Acta Geotech. 2023. [Google Scholar] [CrossRef]
- Brinkgreve, R.; Engin, E.; Swolfs, W. PLAXIS 3D Anniversary Edition, full Manual. Plaxis 2017. Available online: https://www.plaxis.com/support/manuals/plaxis-3d-manuals (accessed on 25 May 2017).
- Bowles, J.E. Foundation Analysis & Design, 5th ed.; McGraw-Hill Companies. Inc.: New York, NY, USA, 1996. [Google Scholar]
- Khoiri, M.; Ou, C.-Y. Evaluation of deformation parameter for deep excavation in sand through case histories. J. Comput. Geotech. 2013, 47, 57–67. [Google Scholar] [CrossRef]
- Schanz, T.; Vermeer, P.; Bonnier, P. The hardening soil model: Formulation and verification. Beyond 2000 in Comput. Geotech. 1999, 1, 281–296. [Google Scholar] [CrossRef]
- Hsiung, B.C.B.; Yang, K.-H. Displacement of ground and diaphragm wall induced by deep excavations in loose to medium dense sand. In Proceedings of the ICSMGE 2017-19th International Conference on Soil Mechanics and Geotechnical Engineering, Seoul, Republic of Korea, 17–22 September 2017. [Google Scholar]
- Zhang, W.; Zhang, R.; Fu, Y.; Goh, A.; Zhang, F. 2D and 3D numerical analysis on strut responses due to one-strut failure. Geomech. Eng. 2018, 15, 965–972. [Google Scholar]
- Yi, F.; Su, J.; Zheng, G.; Cheng, X.S.; Peng, H.T.; Liu, X.M.; Jia, J.W. Progressive collapse analysis and robustness evaluation of a propped excavation failed due to inappropriate strut removal. Acta Geotech. 2023, 2023, 1–27. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Excavation Depth, He (m) | Wall Length (m) | Wall Thickness (m) | Number of Strut Level | Lowest Strut Level (m) | The Factor of Safety against Push-In |
|---|---|---|---|---|---|---|
| 1 * | 16.8 | 32 | 0.9 | 4 | 13 | 1.7 |
| 2 | 19.8 | 38 | 1 | 5 | 15.8 | 1.95 |
| 3 | 22.8 | 43 | 1.2 | 6 | 18.8 | 2.02 |
| 4 | 25.8 | 49 | 1.3 | 7 | 21.8 | 2.07 |
| 5 | 28.8 | 55 | 1.5 | 8 | 24.8 | 2.1 |
| 6 | 30.8 | 59 | 1.6 | 9 | 27.8 | 2.15 |
| (a) Clay | |||||||||
| Layer | Depth (m) | Soil Type | γ (kN/m3) | Su (kPa) | ν′ | E′ (kPa) | |||
| 1 | 0.0–2.0 | Silty clay | 19.3 | 28 | 0.3 | 12,133 | |||
| 3 | 6.5–8.0 | Silty clay | 19.7 | 21 | 0.3 | 9100 | |||
| 7 | 28.5–30.5 | Silty clay | 18.6 | 84 | 0.3 | 36,400 | |||
| (b) Sand | |||||||||
| Layer | Depth (m) | Soil Type | γ (kN/m3) | c′ (kN/m2) | ϕ′ (°) | ψ (°) | E50ref (MPa) | Eoedref (MPa) | Eurref (MPa) |
| 2 | 2.0–6.5 | Silty sand | 20.9 | 0.5 | 32 | 2 | 26.2 | 26.2 | 78.7 |
| 4 | 8.0–17.0 | Silty sand | 20.6 | 0.5 | 32 | 2 | 21.9 | 21.9 | 65.7 |
| 5 | 17.0–23.5 | Silty sand | 18.6 | 0.5 | 32 | 2 | 24.1 | 24.1 | 72.2 |
| 6 | 23.5–28.5 | Silty sand | 19.6 | 0.5 | 33 | 3 | 26.3 | 26.3 | 78.8 |
| 8 | 30.5–42.0 | Silty sand | 19.6 | 0.5 | 34 | 4 | 29.6 | 29.6 | 88.7 |
| 9 | 42.0–60.0 | Silty sand | 19.9 | 0.5 | 34 | 4 | 33.1 | 33.1 | 99.4 |
| (a) Reinforcement Concrete Diaphragm Wall | |||||
| Parameter | Symbol | Value | Unit | ||
| Compressive strength of concrete | f’c | 28 | MPa | ||
| Thickness | d | 0.9 | m | ||
| Young’s modulus | Est | 24.8 × 106 | kN/m2 | ||
| Young’s modulus × 70% | 70% Est | 17.36 × 106 | kN/m2 | ||
| Unit weight | w | 5.5 | kN/m2 | ||
| Poisson’s ratio | ν | 0.2 | - | ||
| (b) Steel props | |||||
| Strut level | Strut level | Preload (kN) | Section area (m2) | EstA (kN) | 60% EstA (kN) |
| Level 1 | 1H400 × 400 × 13 × 21 | 450 | 0.0219 | 4.59 × 106 | 2.75 × 106 |
| Level 2 | 2H400 × 400 × 13 × 21 | 1000 | 0.0437 | 9.18 × 106 | 5.50 × 106 |
| Level 3 | 2H400 × 400 × 13 × 21 | 1400 | 0.0437 | 9.18 × 106 | 5.50 × 106 |
| Level 4 | 2H400 × 400 × 13 × 21 | 1400 | 0.0437 | 9.18 × 106 | 5.50 × 106 |
| Strut | LT % | ||
|---|---|---|---|
| 3D (Using the Maximum Values) | 2D (OSF Reduction in Axial Stiffness) | 2D (Removal of the Whole Strut Level) | |
| S1 | 0 | 0 | 0 |
| S2 | +4.6 | 0 | +6.0 |
| S3 | +32.5 | +26.8 | +128.0 |
| Location | IWD % | ||
|---|---|---|---|
| 3D (Using the Maximum Values) | 2D (OSF Reduction in Axial Stiffness) | 2D (Removal of the Whole Strut Level) | |
| Center | 8.5 | 6.7 | 30.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsiung, B.-C.B.; Phan, K.-H.; Hsiao, D.-H. A Study on the Impacts of One-Strut Failure Scenarios for Deep Excavation in Loose to Medium-Dense Sand. Sustainability 2023, 15, 10530. https://doi.org/10.3390/su151310530
Hsiung B-CB, Phan K-H, Hsiao D-H. A Study on the Impacts of One-Strut Failure Scenarios for Deep Excavation in Loose to Medium-Dense Sand. Sustainability. 2023; 15(13):10530. https://doi.org/10.3390/su151310530
Chicago/Turabian StyleHsiung, Bin-Chen Benson, Khac-Hai Phan, and Darn-Horng Hsiao. 2023. "A Study on the Impacts of One-Strut Failure Scenarios for Deep Excavation in Loose to Medium-Dense Sand" Sustainability 15, no. 13: 10530. https://doi.org/10.3390/su151310530