
Electric Flight in Extreme and Uncertain Urban Environments




Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
- A comprehensive simulation model is developed to reflect the influence of uncertain urban operational environments on electric aircraft performance. An urban environment model with a heat island effect and wind distribution regarding location, altitude, time, and date is developed for uncertainty quantification of UAM. The internal and external uncertain factors are considered using the ordinary differential equation, which guarantees the required modeling fidelity with relatively low complexity.
- An evaluation method is proposed to study the electric aircraft performance subject to given mission way-points. The flight guidance law is augmented with nonlinear dynamic inversion to predict the energy consumption of the electric propulsion system.
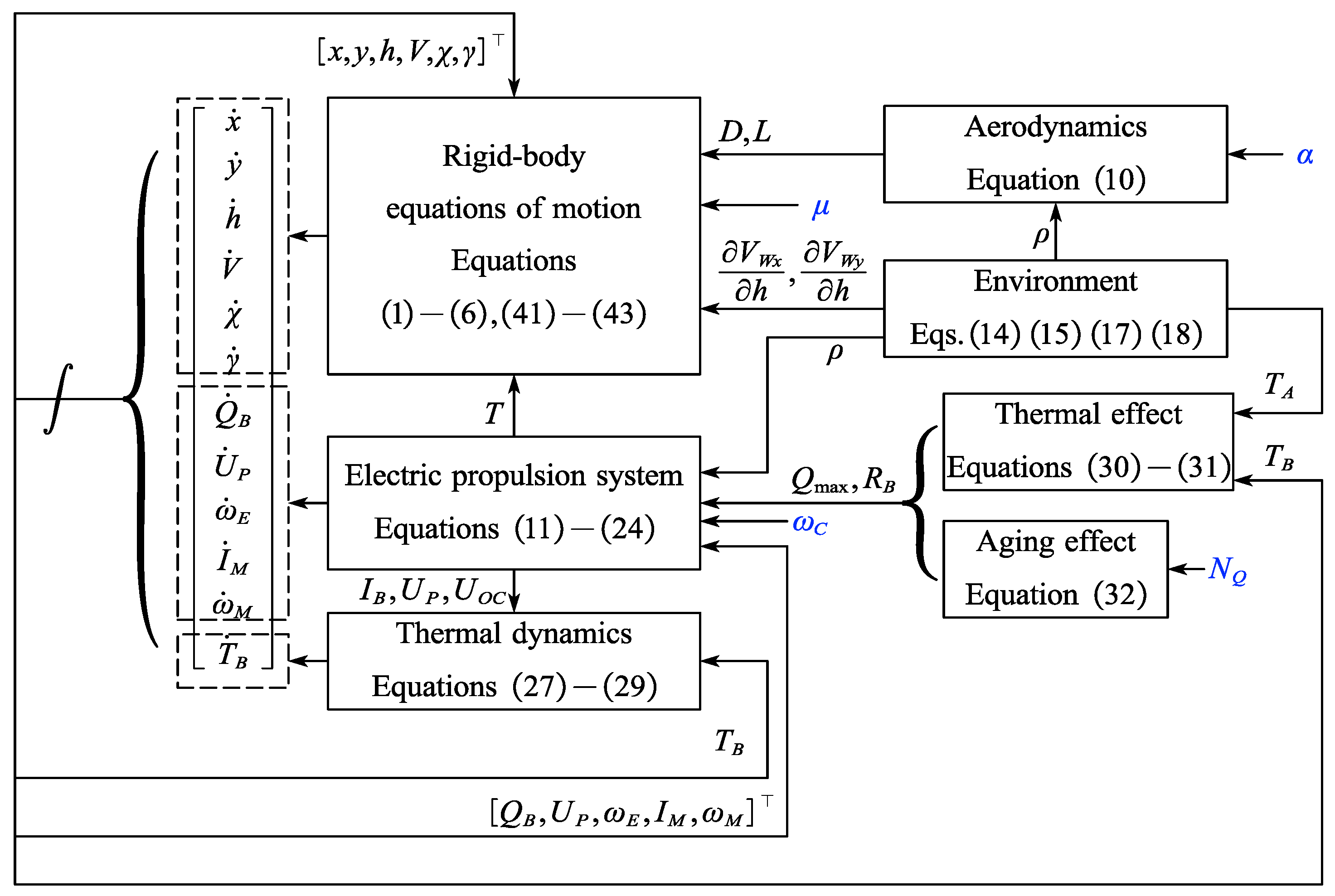
2. Materials and Methods
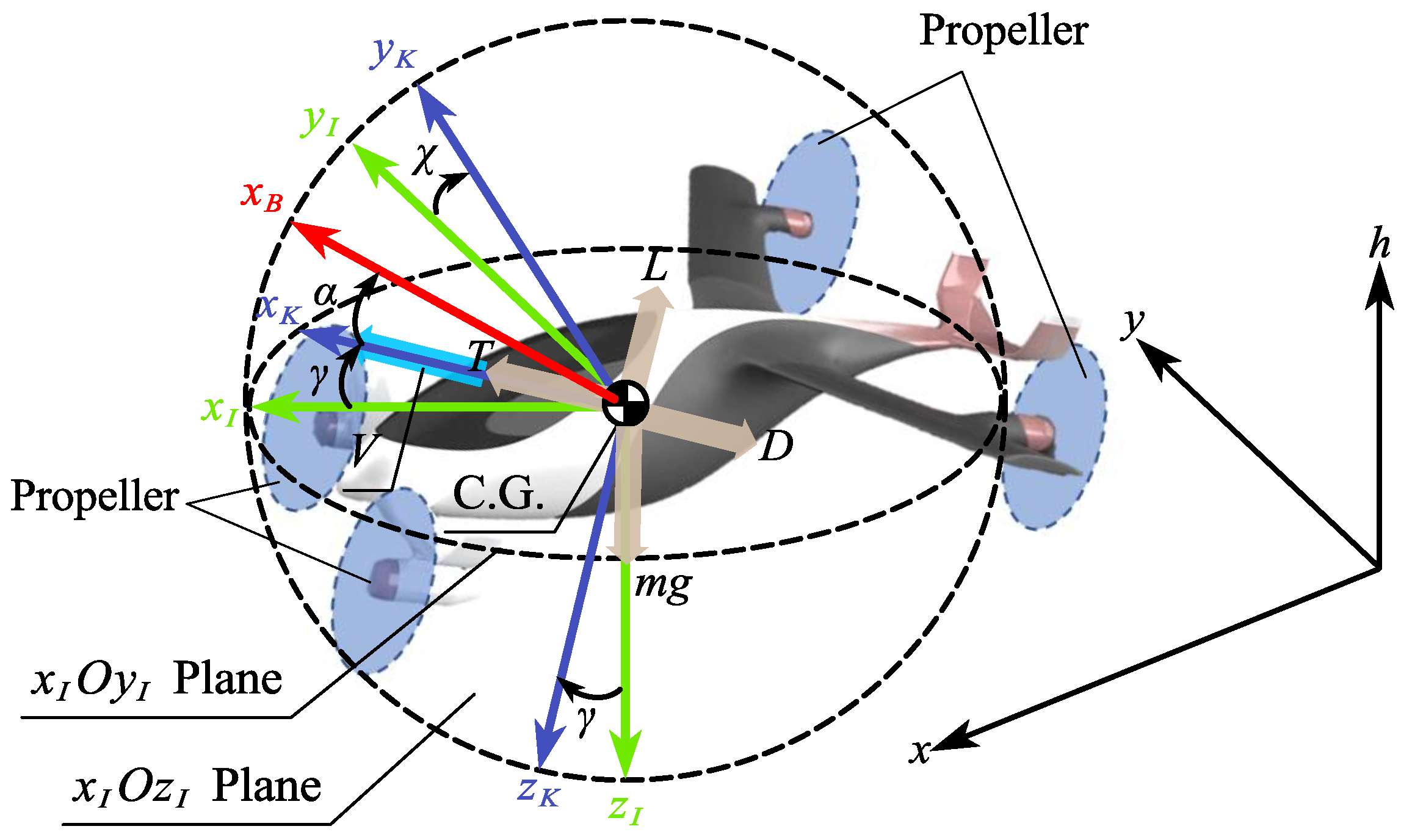
2.1. Dynamic Simulation Model of Rigid-Body Aircraft
- Flat and non-rotating earth. The operational altitude is assumed to be less than 4 km [23]. The low-altitude and low-speed feature allows for this assumption;
- Rigid-body motion. Due to the limits of the UAM application scenario, the velocity of eVTOL is low compared to that of the high-speed aircraft. Hence, the aeroelasticity is omitted;
- The mass distribution is symmetric regarding the vertical plane defined in the body-frame of eVTOL;
- Time-invariant total mass. As eVTOL is driven by LIB rather than fossil fuel, there exists no mass reduction led by fuel consumption.
2.2. Comprehensive Model of Electric Propulsion
2.2.1. Equivalent-Circuit Model
2.2.2. Thermal and Aging Effect Model
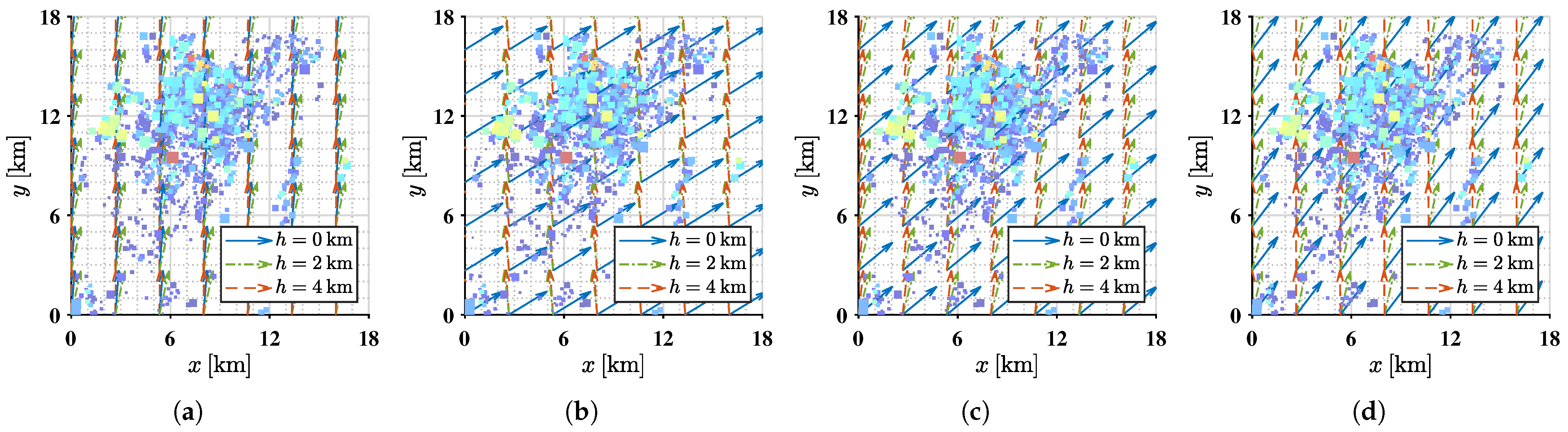
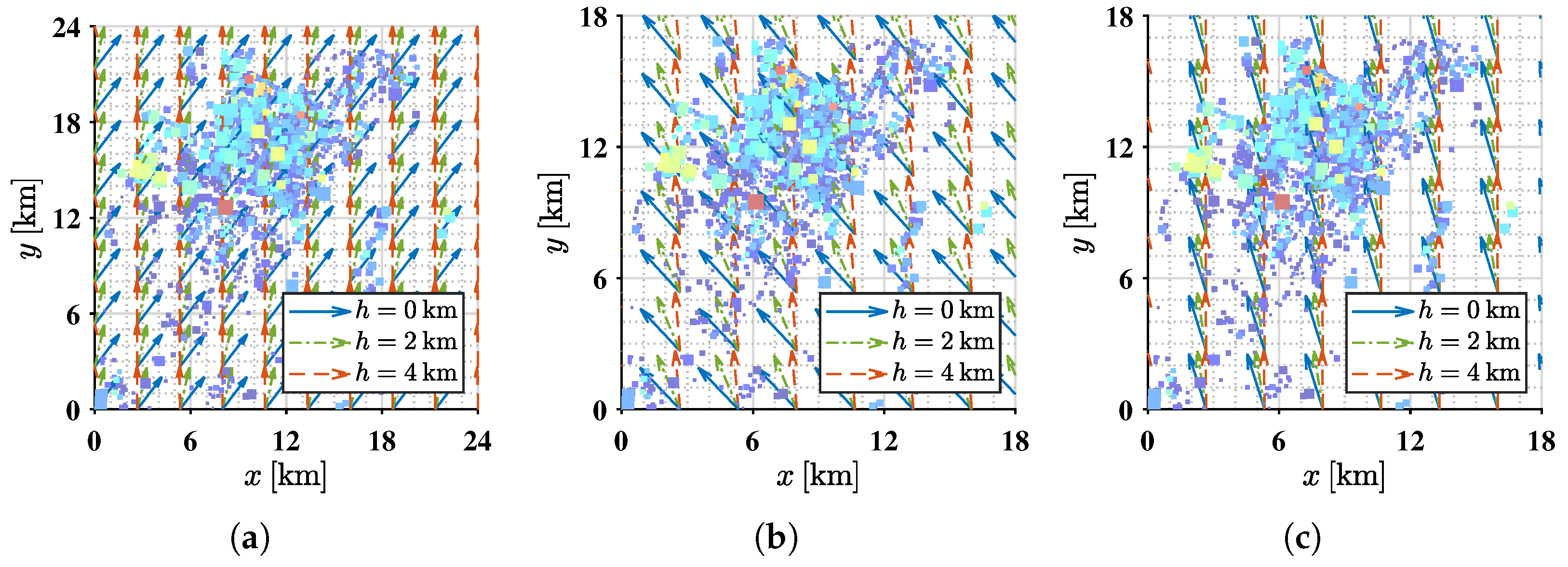
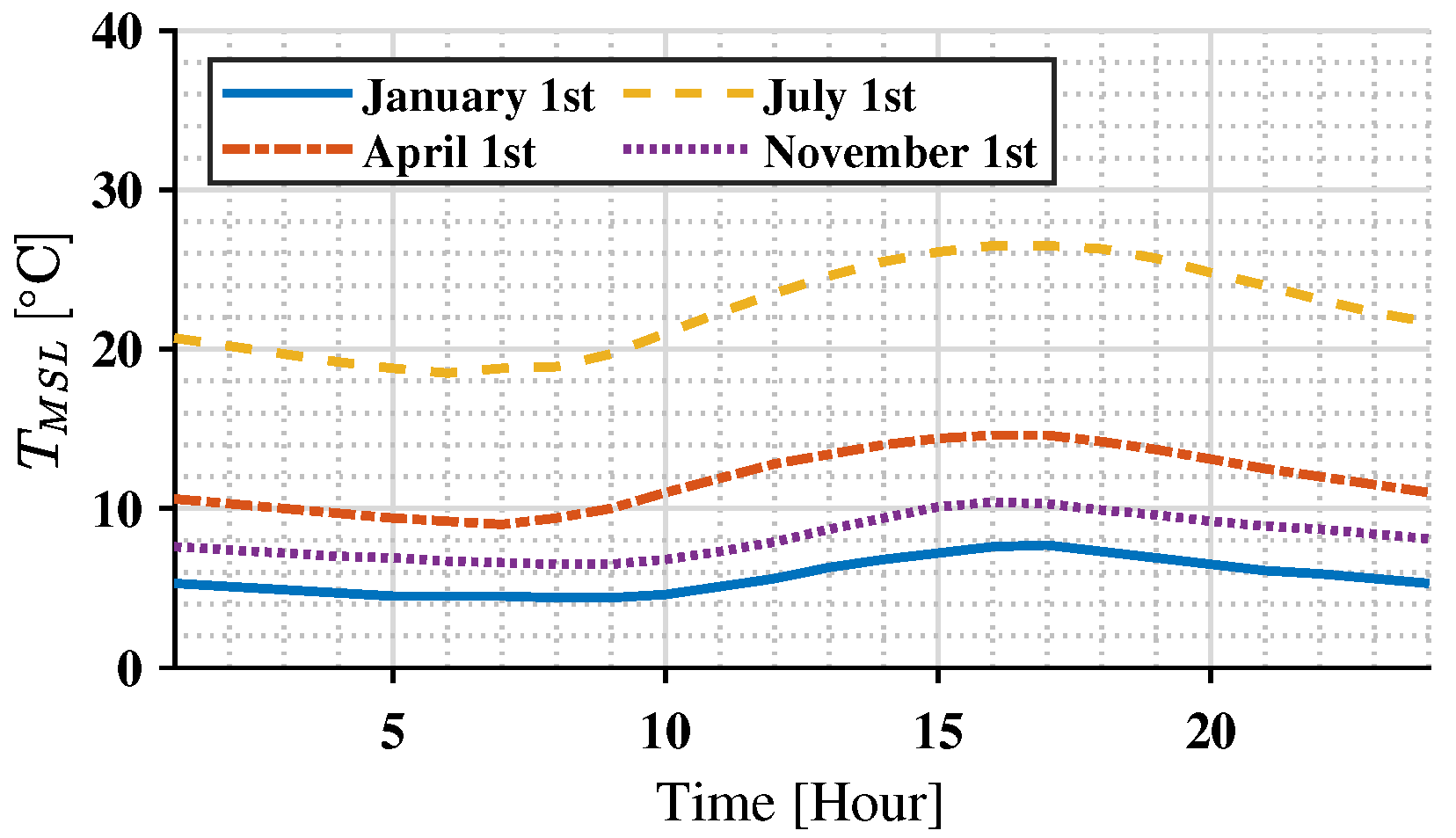
2.3. Environment Model
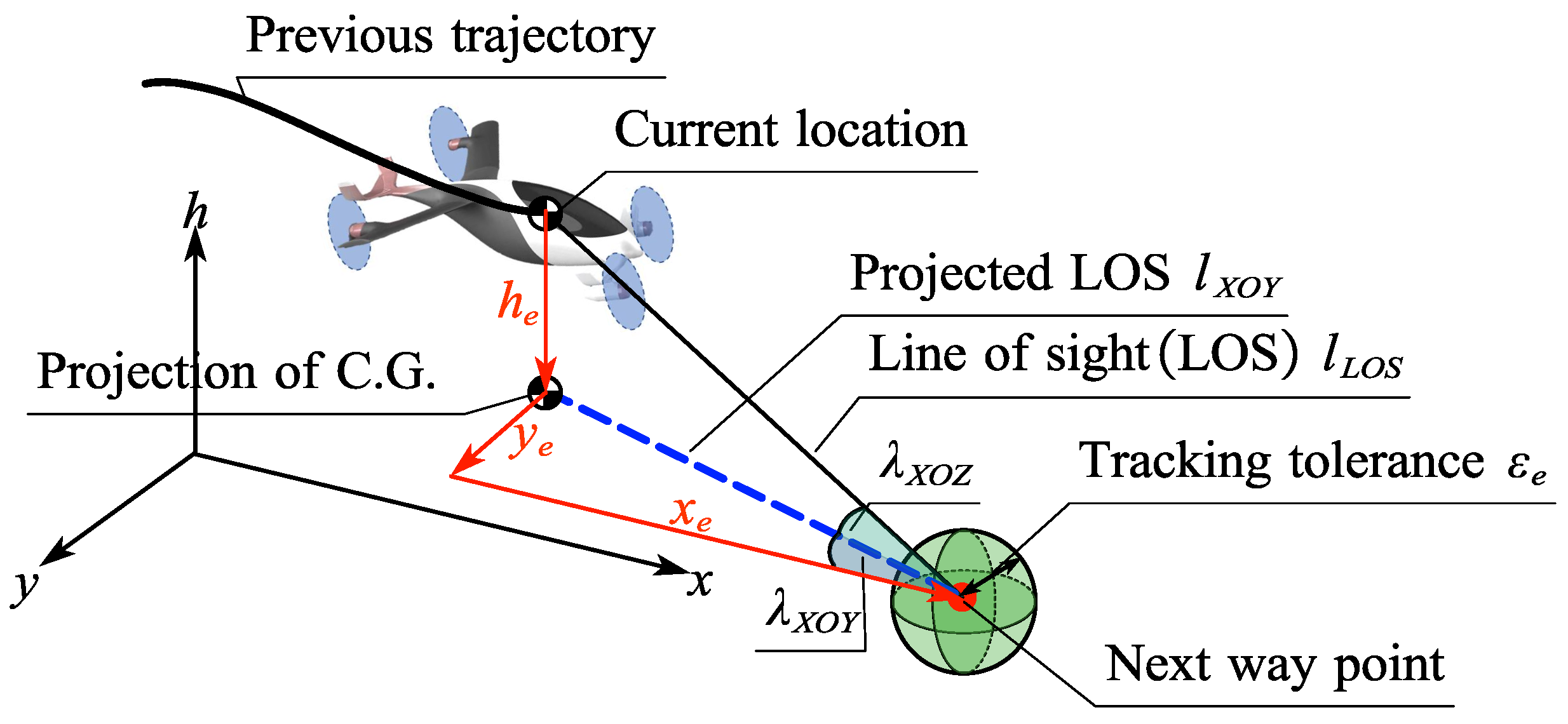
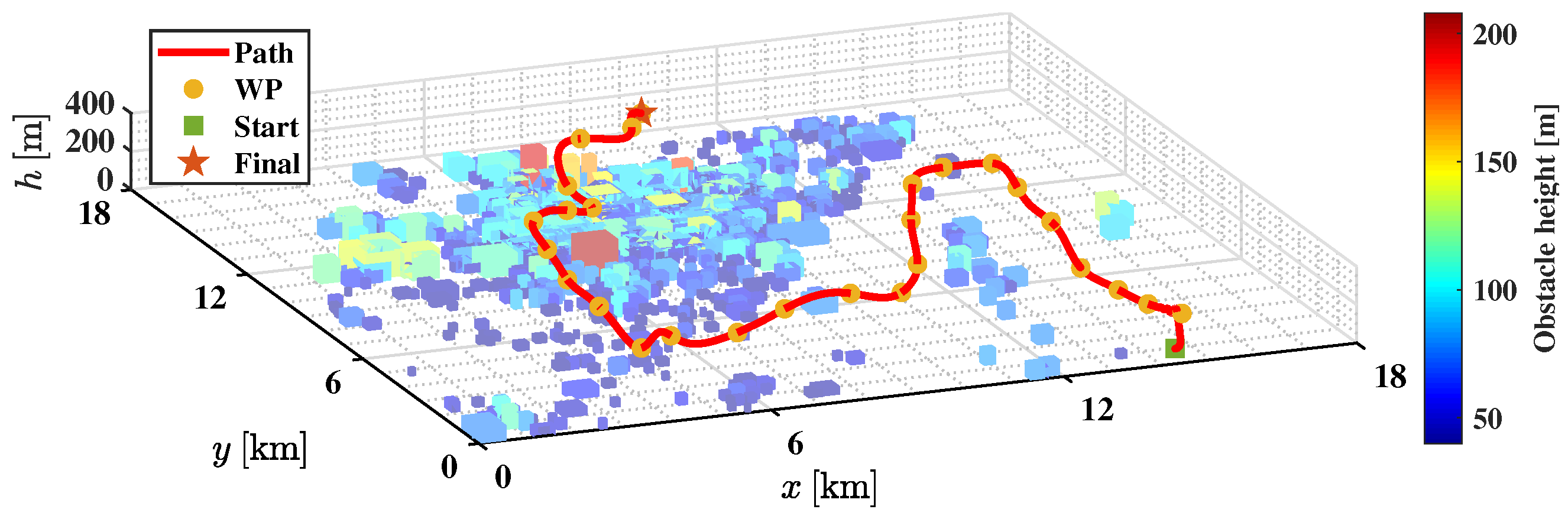
2.4. Performance Evaluation by Flight Guidance and Nonlinear Dynamic Inversion
2.4.1. Flight Guidance Law
| Algorithm 1 Flight guidance law with switching way points |
|
2.4.2. Control Input Propagation by Nonlinear Dynamic Inversion
- Quasi-static assumption of electric propulsion. The time constants of electric propulsive states and are much smaller than that of rigid-body motions, for which the time derivatives of the former may be neglected, thus, giving rise to
- Following the previous point, the tuning process of the motor controller is omitted, the actual rotational speed is, thus, the same as the commanded value
3. Results
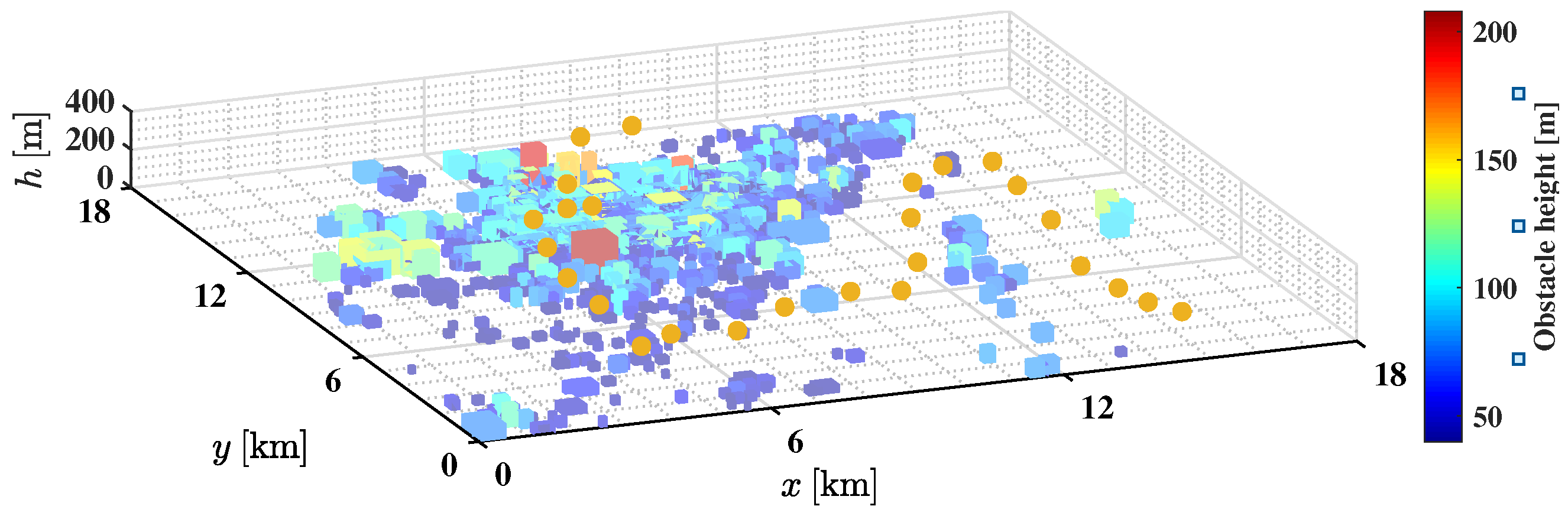
3.1. Exemplary Aircraft and Scenario
3.2. Simulation Results and Analysis
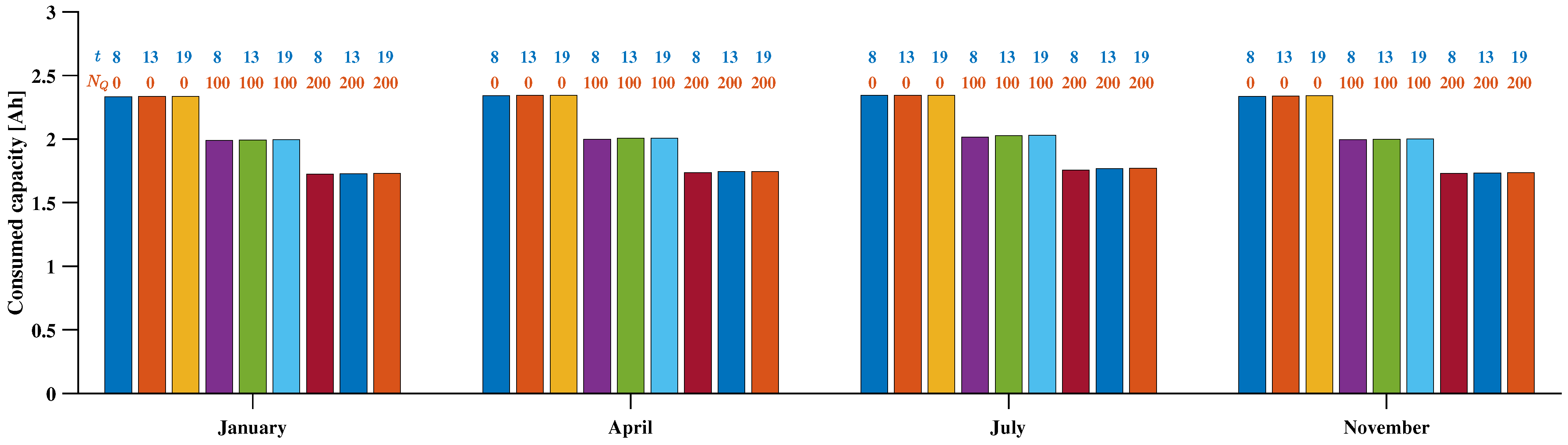
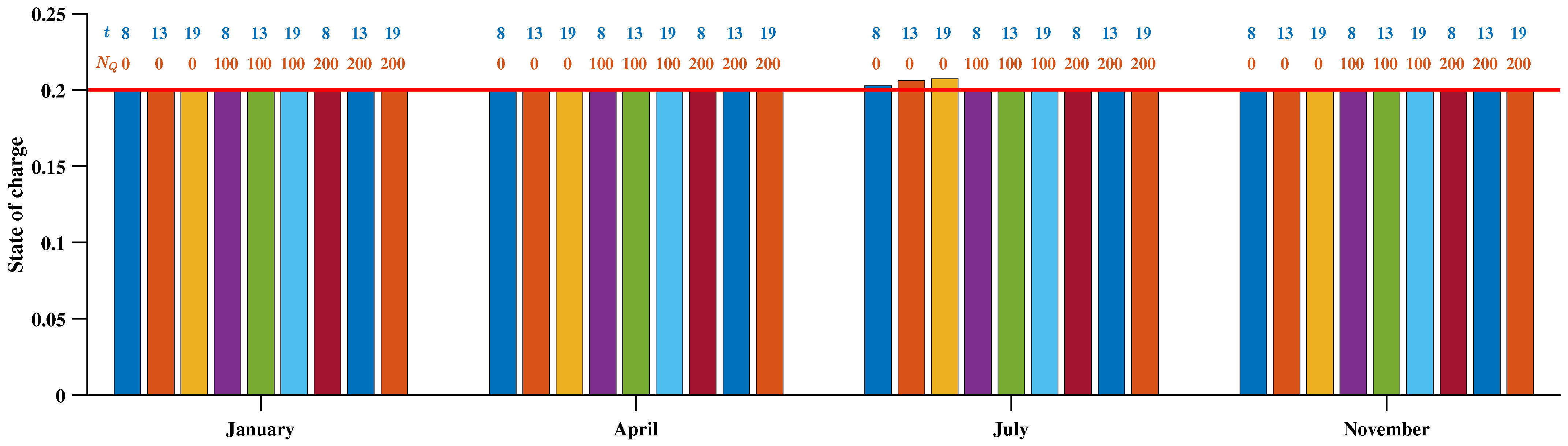
- Seasons represented by the month: January, April, July, and November.
- Time of day: 8:00, 13:00, and 19:00.
- Cycling numbers of LIBs: 0 (new batteries), 200, and 400.
4. Discussion
- For the selected operating scene, the performance of the exemplary aircraft is more sensitive to the battery aging effect compared to the other uncertainties of weather, the urban heat island effect, and wind. Thus, it is necessary to pay attention to the cycling number of LIBs used in the electric aircraft.
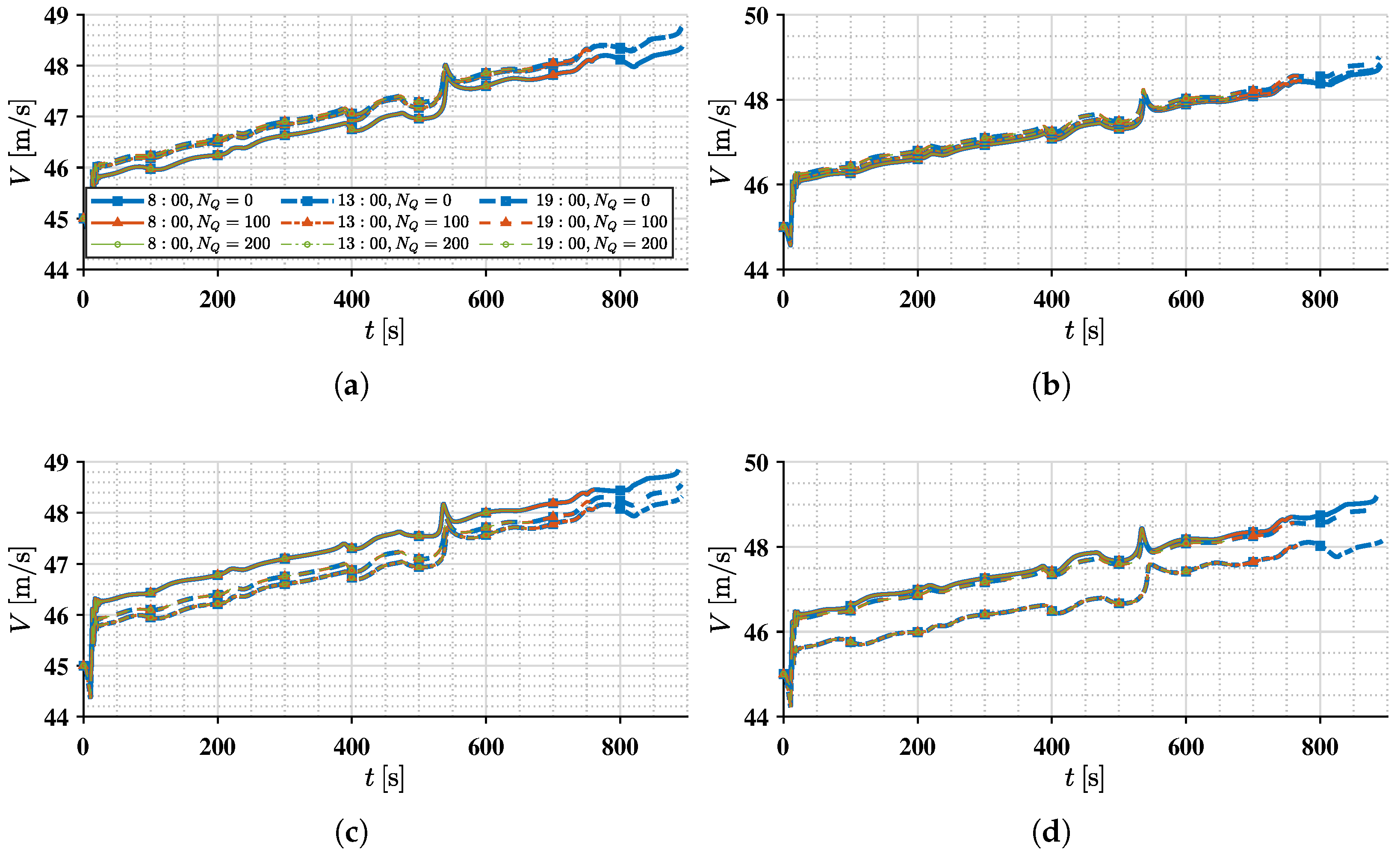
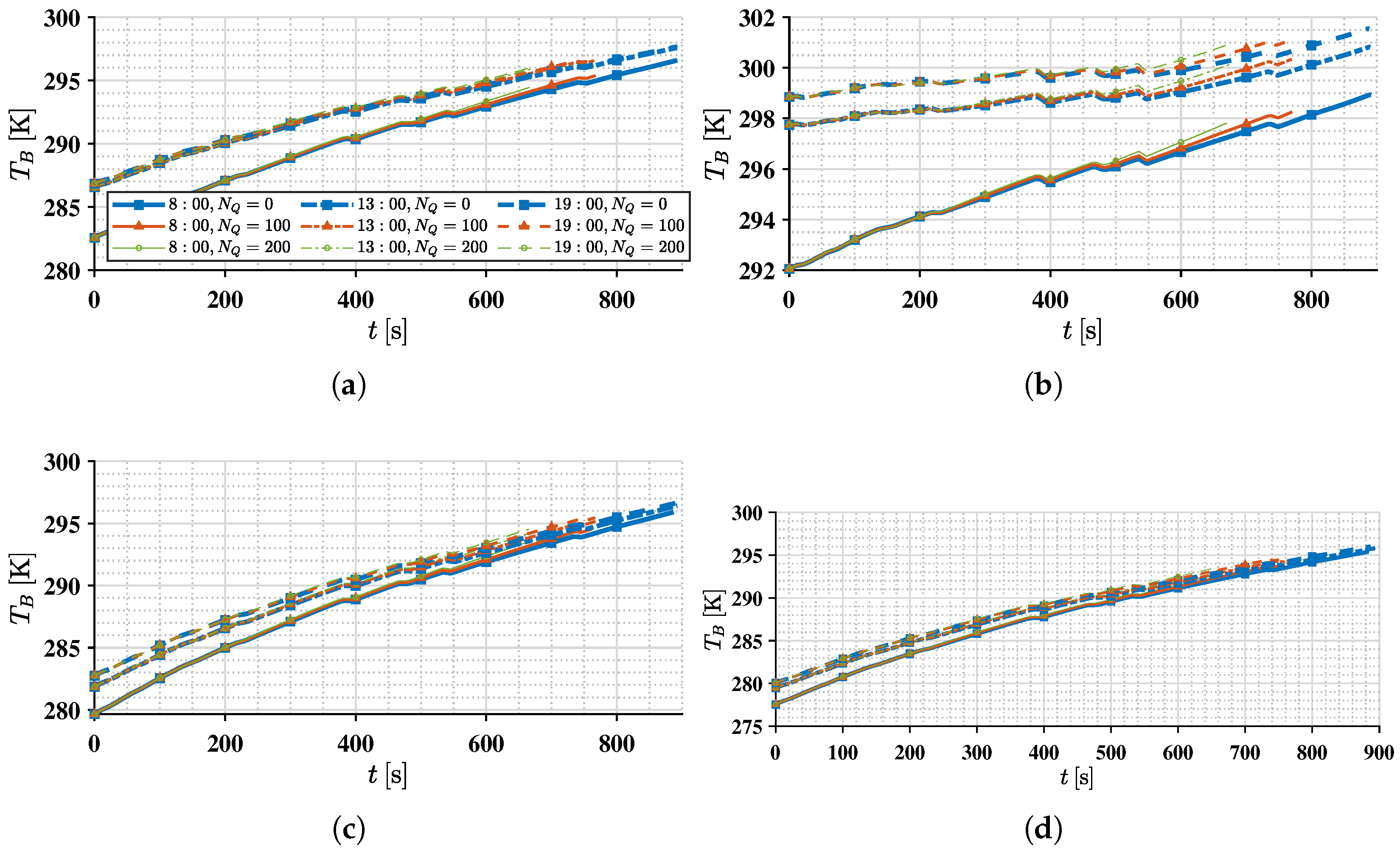
- Given the premise that the LIB temperature stays below the safety value, it is beneficial to operate electric aircraft with a higher ambient temperature, for instance, in summer, and make use of the urban heat island effect.
- The change in time of day results in different mean-sea-level temperatures and wind directions. For the operating range of urban electric flight, the magnitude of wind speed may be considered as constant regardless of the latitude and longitude change. However, the wind speed variation (especially the wind direction) as a result of different altitudes should be incorporated.
- Models of electric propulsion systems with higher fidelity. Currently, the thermal dynamics of the battery pack are represented by the lumped-parameter model of a single LIB cell. This can be improved by introducing a more accurate pack model considering the heat transfer among cells. Furthermore, the motor thermal dynamics and effect are not considered so far. Necessary constraints should be incorporated in future works.
- Dynamic aging model of LIB. In this paper, the aging condition of LIBs is directly specified by setting cycling numbers. In actuality, the aging process of an LIB can be complex due to different mission loads and usage conditions. Hence, more precise aging models need to be employed to dynamically evaluate the aging status of the LIB.
- Four-dimensional guidance. In this work, the velocity is desired to be constant during flight. In real-world operations, it is often the case to set a desired arrival time in UAM. Therefore, the current guidance law can be updated to accommodate this requirement.
5. Conclusions
- The proposed flight guidance law is applicable for electric aircraft to realize way-point tracking in various urban scenes, despite the internal and external uncertainties.
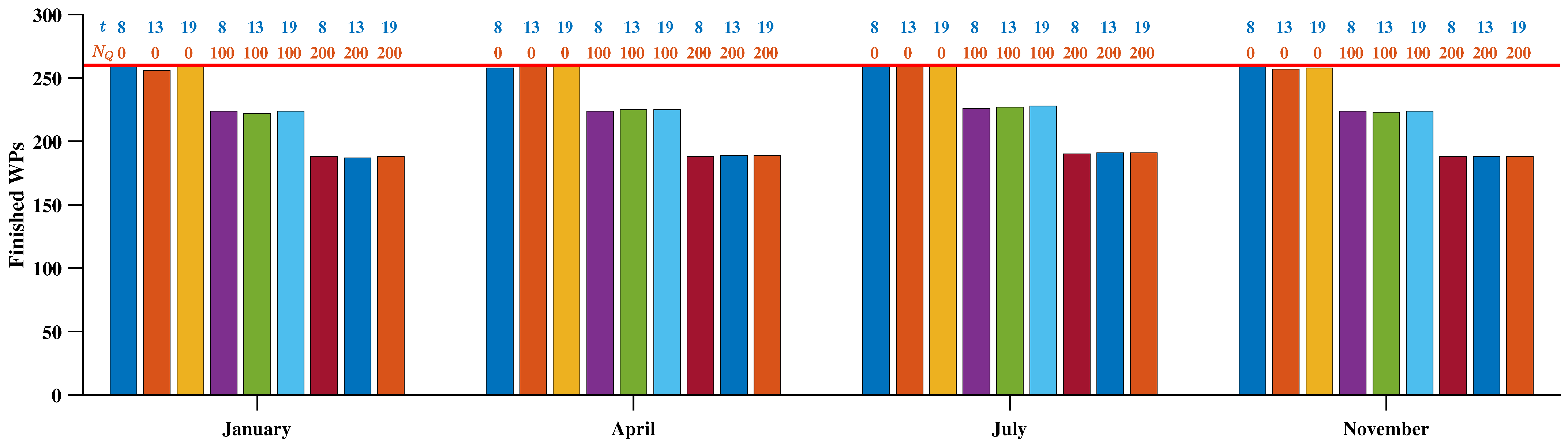
- Electric aircraft performance varies considerably with respect to the micro-climate in the urban environment. Among others, the change in mean-sea-level temperature led by different seasons or the urban heat island effect is the dominant factor to consider in analysis. The number of finished way points can change by at most 1.53% due to the time of day. When the mean-sea-level temperature is higher, the number of finished way points presents the least variation (no larger than 0.38%) in all battery aging statuses. The higher mean-sea-level temperature contributes to a lower fluctuation in aircraft velocity, yet leads to a higher accumulation rate in generated battery heat and, thus, a more quickly increasing battery temperature.
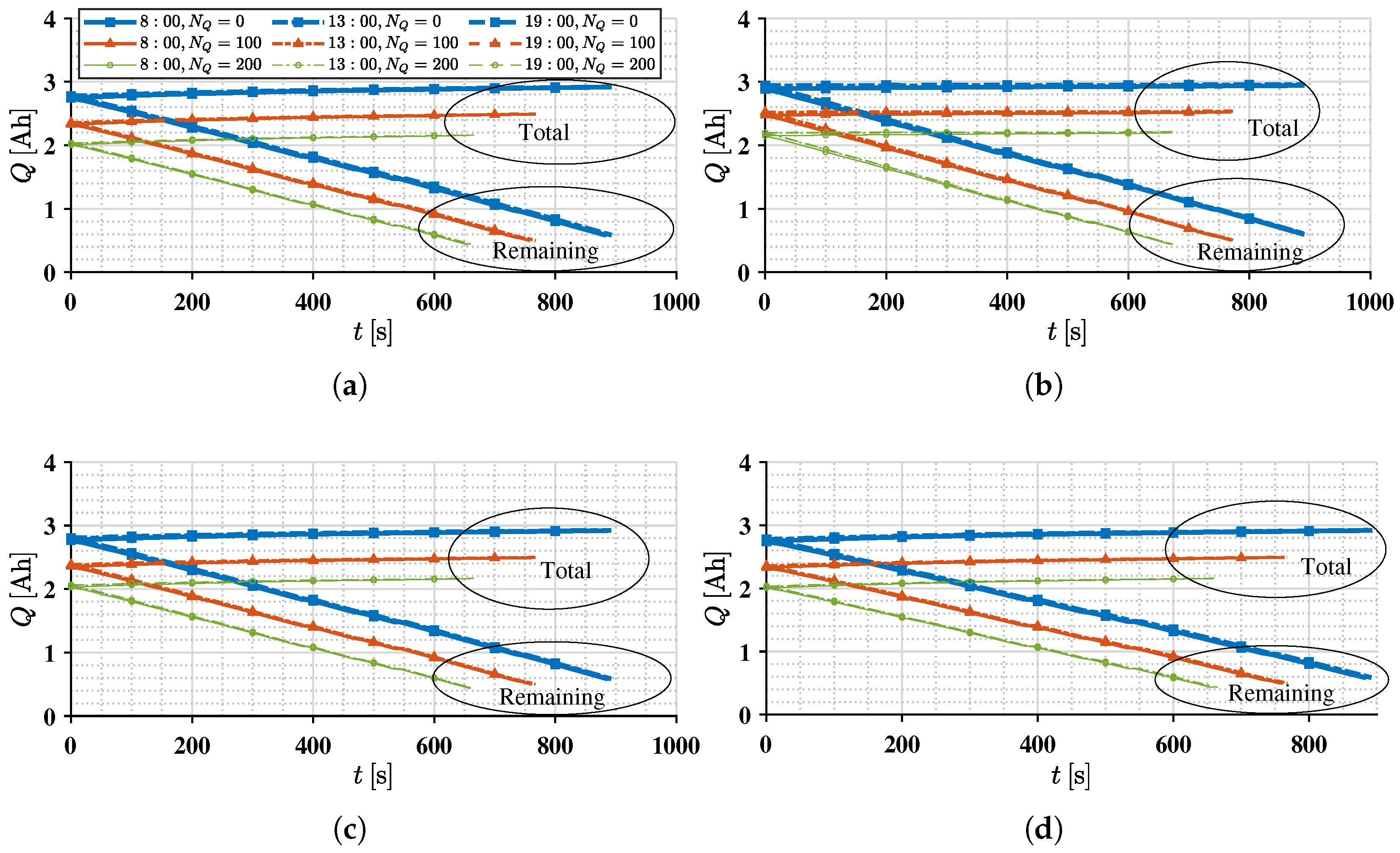
- The aging status of LIB, which results in the loss of maximum capacity, is an important internal uncertainty that causes degradation in the electric aircraft performance, especially in the maximum range. With a typical urban environment and load profile, the maximum battery capacity is separately reduced at most by 15.05% and 26.68% with cycling numbers of 100 and 200. Thus, the cycling number of LIB should be carefully monitored.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| C.G. | Center of gravity |
| ECM | Equivalent-circuit model |
| EMF | Electromotive force |
| eVTOL | Electric vertical takeoff and landing |
| LIB | Lithium-ion battery |
| LOS | Line of sight |
| NDI | Nonlinear dynamic inversion |
| ODE | Ordinary differential equations |
| SOC | State of charge |
| UAM | Urban air mobility |
| WP | Way point |
| Vectors, Matrices | |
| Matrix of desired way points | |
| State vector | |
| Control vector | |
| Parameters | |
| Fitting coefficients of open-circuit voltage | |
| Specific heat capacity of battery cell | |
| Fitting coefficients of thrust coefficient | |
| Fitting coefficients of torque coefficient | |
| Polarization capacitor/resistor | |
| Propeller diameter | |
| g | Gravitational acceleration |
| Heat convection coefficient | |
| Motor back-EMF/torque constants | |
| Motor induction/resistance | |
| Aircraft/Battery mass | |
| Number of batteries connected in series/parallel | |
| Number of propellers | |
| Lateral/vertical guidance gains | |
| Aircraft reference area | |
| Battery surface area | |
| Efficiency of motor controller | |
| Coordinate systems | |
| I | Inertia frame |
| K | Kinematic frame |
| B | Body frame |
| Variables | |
| Longitudinal/lateral/vertical acceleration command | |
| Aerodynamic drag/lift coefficients | |
| Propeller thrust/torque coefficients | |
| Aerodynamic drag/lift | |
| Specific force of axis in kinematic frame | |
| Battery cell/Motor current | |
| Line of sight angle | |
| Battery terminal/open-circuit/polarization voltage | |
| Length of line of sight | |
| Length of line of sight projection in horizontal plane | |
| Motor voltage | |
| V | Kinematic velocity |
| Longitudinal/Lateral components of wind speed | |
| Battery consumed/maximum capacity | |
| Battery heat generation/convection | |
| T | Thrust |
| Ambient/battery temperature | |
| Horizontal/lateral/vertical positions | |
| Longitudinal/lateral/vertical tracking error | |
| Longitudinal/lateral/vertical positions of desired way points | |
| Angle of attack | |
| Flight course/path angles | |
| Propeller advance ratio | |
| Duty cycle of motor controller | |
| Bank angle | |
| Commanded/actual/integrated error of motor rotational speed | |
| Air density | |
| Tolerance of tracking error | |
References
- Cohen, A.P.; Shaheen, S.A.; Farrar, E.M. Urban Air Mobility: History, Ecosystem, Market Potential, and Challenges. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6074–6087. [Google Scholar] [CrossRef]
- Thipphavong, D.; Apaza, R.; Barmore, B.; Battiste, V.; Burian, B.; Dao, Q.; Feary, M.; Go, S.; Goodrich, K.; Homola, J.; et al. Urban air mobility airspace integration concepts and considerations. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; pp. 1–20. [Google Scholar] [CrossRef]
- Goyal, R.; Reiche, C.; Fernando, C.; Cohen, A. Advanced Air Mobility: Demand Analysis and Market Potential of the Airport Shuttle and Air Taxi Markets. Sustainability 2021, 13, 7421. [Google Scholar] [CrossRef]
- Ullah, I.; Safdar, M.; Zheng, J.; Severino, A.; Jamal, A. Employing Bibliometric Analysis to Identify the Current State of the Art and Future Prospects of Electric Vehicles. Energies 2023, 16, 2344. [Google Scholar] [CrossRef]
- Rothfeld, R.; Fu, M.; Balać, M.; Antoniou, C. Potential Urban Air Mobility Travel Time Savings: An Exploratory Analysis of Munich, Paris, and San Francisco. Sustainability 2021, 13, 2217. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, T.; Liu, Y.; Zheng, Y. Multi-fidelity Optimization of Ducted Fan for eVTOL Aircraft. In Proceedings of the AIAA Aviation 2023 Forum, San Diego, CA, USA, 12–16 June 2023; pp. 1–10. [Google Scholar] [CrossRef]
- Cavallo, A.; Cancielloa, G.; Russo, A. Buck-Boost Converter Control for Constant Power Loads in Aeronautical Applications. In Proceedings of the 2018 IEEE Conference on Decision and Control, Miami Beach, FL, USA, 12–16 June 2018; pp. 6741–6747. [Google Scholar] [CrossRef]
- Wang, M.; Chu, N.; Bhardwaj, P.; Zhang, S.; Holzapfel, F. Minimum-Time Trajectory Generation of eVTOL in Low-Speed Phase: Application in Control Law Design. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 1260–1275. [Google Scholar] [CrossRef]
- Russo, A.; Cavallo, A. Stability and Control for Buck–Boost Converter for Aeronautic Power Management. Energies 2023, 16, 988. [Google Scholar] [CrossRef]
- Steiner, M. Urban Air Mobility: Opportunities for the Weather Community. Bull. Am. Meteorol. Soc. 2019, 100, 2131–2133. [Google Scholar] [CrossRef]
- NASA. U.S. Standard Atmosphere; Technical Report; U.S. Government Printing Office: Washington, DC, USA, 1976.
- Bradford, S. Urban Air Mobility (UAM) Concept of Operations; Technical Report; Federal Aviation Administration: Washington, DC, USA, 2020.
- Avinor. Preferences for the Introduction of Electrified Commercial Aircraft; Technical Report; Civil Aviation Authority of Norway: Bodo, Norway, 2020. [Google Scholar]
- Wang, M.; Luiz, S.O.D.; Lima, A.M.N. Desensitized Optimal Control of Electric Aircraft Subject to Electrical-Thermal Constraints. IEEE Trans. Transp. Electrif. 2022, 8, 4190–4204. [Google Scholar] [CrossRef]
- Luiz, S.O.D.; Souza, E.G.; Lima, A.M.N. Representing the Accumulator Ageing in an Automotive Lead-Acid Battery Model. J. Control. Autom. Electr. Syst. 2022, 33, 204–218. [Google Scholar] [CrossRef]
- Vermeer, W.; Mouli, G.R.C.; Bauer, P. A Comprehensive Review on the Characteristics and Modeling of Lithium-Ion Battery Aging. IEEE Trans. Transp. Electrif. 2022, 8, 2205–2232. [Google Scholar] [CrossRef]
- Rezende, R.N. General Aviation Electrification: Challenges on the transition to new technologies. In Proceedings of the AIAA Propulsion and Energy 2021 Forum, Virtual Event, 9–11 August 2021; pp. 1–7. [Google Scholar]
- Pintos, P.B.; Sande, C.U.; Álvarez, Ó.C. Sustainable propulsion alternatives in regional aviation: The case of the Canary Islands. Transp. Res. Part D 2023, 120, 103779. [Google Scholar] [CrossRef]
- Bærheim, T.; Lamb, J.J.; Nøland, J.K.; Burheim, O.S. Potential and Limitations of Battery-Powered All-Electric Regional Flights—A Norwegian Case Study. IEEE Trans. Transp. Electrif. 2023, 9, 1809–1825. [Google Scholar] [CrossRef]
- Reiche, C.; Cohen, A.P.; Fernando, C. An Initial Assessment of the Potential Weather Barriers of Urban Air Mobility. IEEE Trans. Transp. Electrif. 2021, 22, 6018–6027. [Google Scholar] [CrossRef]
- Wang, M.; Zhang, S.; Shi, D.; Holzapfel, F. Operational availability analysis of short-haul electric aeroplane using polynomial chaos expansion. Transp. B Transp. Dyn. 2022, 10, 988–1009. [Google Scholar] [CrossRef]
- Clarke, M.A.; Alonso, J.J. Forecasting the Operational Lifetime of Battery-Powered Electric Aircraft. J. Aircr. 2023, 60, 47–55. [Google Scholar] [CrossRef]
- Johnson, W.; Silva, C. Observations from Exploration of VTOL Urban Air Mobility Designs. In Proceedings of the 7th Asian/Australian Rotorcraft Forum, Jeju Island, Korea, 29 October–1 November 2018; pp. 1–15. [Google Scholar]
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. The Kinematics and Dynamics of Aircraft Motion. In Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2016; pp. 1–44. [Google Scholar] [CrossRef]
- Wang, M.; Zhang, S.; Diepolder, J.; Holzapfel, F. Battery Package Design Optimization for Small Electric Aircraft. Chin. J. Aeronaut. 2020, 33, 2864–2876. [Google Scholar] [CrossRef]
- Bernardi, D.; Pawlikowski, E.; Newman, J. A General Energy Balance for Battery Systems. J. Electrochem. Soc. 1985, 132, 5–12. [Google Scholar] [CrossRef]
- Panasonic Industry. Specifications for NCR18650GA, 1st ed.; Panasonic Industry Co., Ltd.: Secaucus, NJ, USA, 2017. [Google Scholar]
- Bueno, B.; Norford, L.; Hidalgo, J.; Pigeon, G. The urban weather generator. J. Build. Perform. Simul. 2013, 6, 269–281. [Google Scholar] [CrossRef]
- Yang, J.H. The Curious Case of Urban Heat Island: A Systems Analysis. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2016. [Google Scholar]
- Weitz, L.A. Derivation of a Point-Mass Aircraft Model Used for Fast-Time Simulation; Technical Report; MITRE Company: Bedford, MA, USA, 2015. [Google Scholar]
- Zarchan, P. Trajectory Shaping Guidance. In Tactical and Strategic Missile Guidance, 6th ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2012; pp. 569–600. [Google Scholar] [CrossRef]
- New York City Department of City Planning. PLUTO and MapPLUTO. Available online: https://www.nyc.gov/site/planning/data-maps/open-data/dwn-pluto-mappluto.page (accessed on 27 June 2023).
- Mathworks. Atmoshwm: Implement Horizontal Wind Model; The MathWorks: Natick, MA, USA, 2019; Available online: https://ww2.mathworks.cn/help/aerotbx/ug/atmoshwm.html (accessed on 25 June 2023).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value 2 |
|---|---|---|---|
| m | |||
| Date | Time | Finished WPs | SOC 1 | ||
|---|---|---|---|---|---|
| 1 January | 8:00 | 0 | 260 | 0.2000 | 2.3329 |
| 100 | 224 | 0.2000 | 1.9903 | ||
| 200 | 188 | 0.2000 | 1.7244 | ||
| 13:00 | 0 | 256 | 0.2000 | 2.3357 | |
| 100 | 222 | 0.2000 | 1.9937 | ||
| 200 | 187 | 0.2000 | 1.7282 | ||
| 19:00 | 0 | 260 | 0.2000 | 2.3365 | |
| 100 | 224 | 0.2000 | 1.9949 | ||
| 200 | 188 | 0.2000 | 1.7299 | ||
| 1 April | 8:00 | 0 | 258 | 0.2000 | 2.3401 |
| 100 | 224 | 0.2000 | 1.9994 | ||
| 200 | 189 | 0.2000 | 1.7244 | ||
| 13:00 | 0 | 260 | 0.2000 | 2.3452 | |
| 100 | 225 | 0.2000 | 2.0068 | ||
| 200 | 189 | 0.2000 | 1.7442 | ||
| 19:00 | 0 | 260 | 0.2000 | 2.3402 | |
| 100 | 225 | 0.2000 | 2.0073 | ||
| 200 | 189 | 0.2000 | 1.7362 | ||
| 1 July | 8:00 | 0 | 260 | 0.2028 | 2.3447 |
| 100 | 226 | 0.2000 | 2.0161 | ||
| 200 | 190 | 0.2000 | 1.7554 | ||
| 13:00 | 0 | 260 | 0.2073 | 2.3392 | |
| 100 | 227 | 0.2000 | 1.9980 | ||
| 200 | 191 | 0.2000 | 1.7337 | ||
| 19:00 | 0 | 260 | 0.2062 | 2.3402 | |
| 100 | 228 | 0.2000 | 2.0313 | ||
| 200 | 191 | 0.2000 | 1.7362 | ||
| 1 November | 8:00 | 0 | 260 | 0.2000 | 2.3358 |
| 100 | 224 | 0.2000 | 1.9942 | ||
| 200 | 188 | 0.2000 | 1.7290 | ||
| 13:00 | 0 | 257 | 0.2000 | 2.3392 | |
| 100 | 223 | 0.2000 | 1.9980 | ||
| 200 | 188 | 0.2000 | 1.7337 | ||
| 19:00 | 0 | 258 | 0.2000 | 2.3402 | |
| 100 | 224 | 0.2000 | 2.0000 | ||
| 200 | 188 | 0.2000 | 1.7362 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Luiz, S.O.D.; Zhang, S.; Lima, A.M.N. Electric Flight in Extreme and Uncertain Urban Environments. Sustainability 2023, 15, 12590. https://doi.org/10.3390/su151612590
Wang M, Luiz SOD, Zhang S, Lima AMN. Electric Flight in Extreme and Uncertain Urban Environments. Sustainability. 2023; 15(16):12590. https://doi.org/10.3390/su151612590
Chicago/Turabian StyleWang, Mingkai, Saulo O. D. Luiz, Shuguang Zhang, and Antonio M. N. Lima. 2023. "Electric Flight in Extreme and Uncertain Urban Environments" Sustainability 15, no. 16: 12590. https://doi.org/10.3390/su151612590
APA StyleWang, M., Luiz, S. O. D., Zhang, S., & Lima, A. M. N. (2023). Electric Flight in Extreme and Uncertain Urban Environments. Sustainability, 15(16), 12590. https://doi.org/10.3390/su151612590