
Multi-Objective Design of UAS Air Route Network Based on a Hierarchical Location–Allocation Model

Abstract
:1. Introduction
1.1. Related Work

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Characteristic | Article | Main Contribution |
|---|---|---|---|
| Airspace structure | Unstructured | [7,8] | Assessed low-altitude airspace capacity after the introduction of UAS operations. |
| Structured | [9,10,11,12] | Proposed several UAS airspace structural designs (e.g., layers, lanes, or blocks) and investigated the influence of the airspace structure on performance (e.g., capacity, risk). | |
| Path planning | Single vehicle | [12,13,14] | Generated safe and cost-effective paths for UASs independently by using algorithms such as A* and Rapidly-Exploring Random Tree. |
| Multiple vehicles | [15,16,17] | Feasible routes designed between UAS Origin–Destination (OD) pairs within sectored or gridded airspace. | |
| Route network type | Single-layer network | [16,17,18] | Single-level route network connecting conflict-free nodes and links that are away from hazardous airspace. |
| Multi-layer network | One transport mode: [2,19,20,21,26] | Extracted the hierarchical organization of the transportation network and identified UAS demand points as hubs or spokes. | |
| Multimodal transport: [23,24,25] | Interconnected layers via hub locations to integrate two or more different transportation modes. |
1.2. Motivation
1.3. Summary of Contributions
- (1)
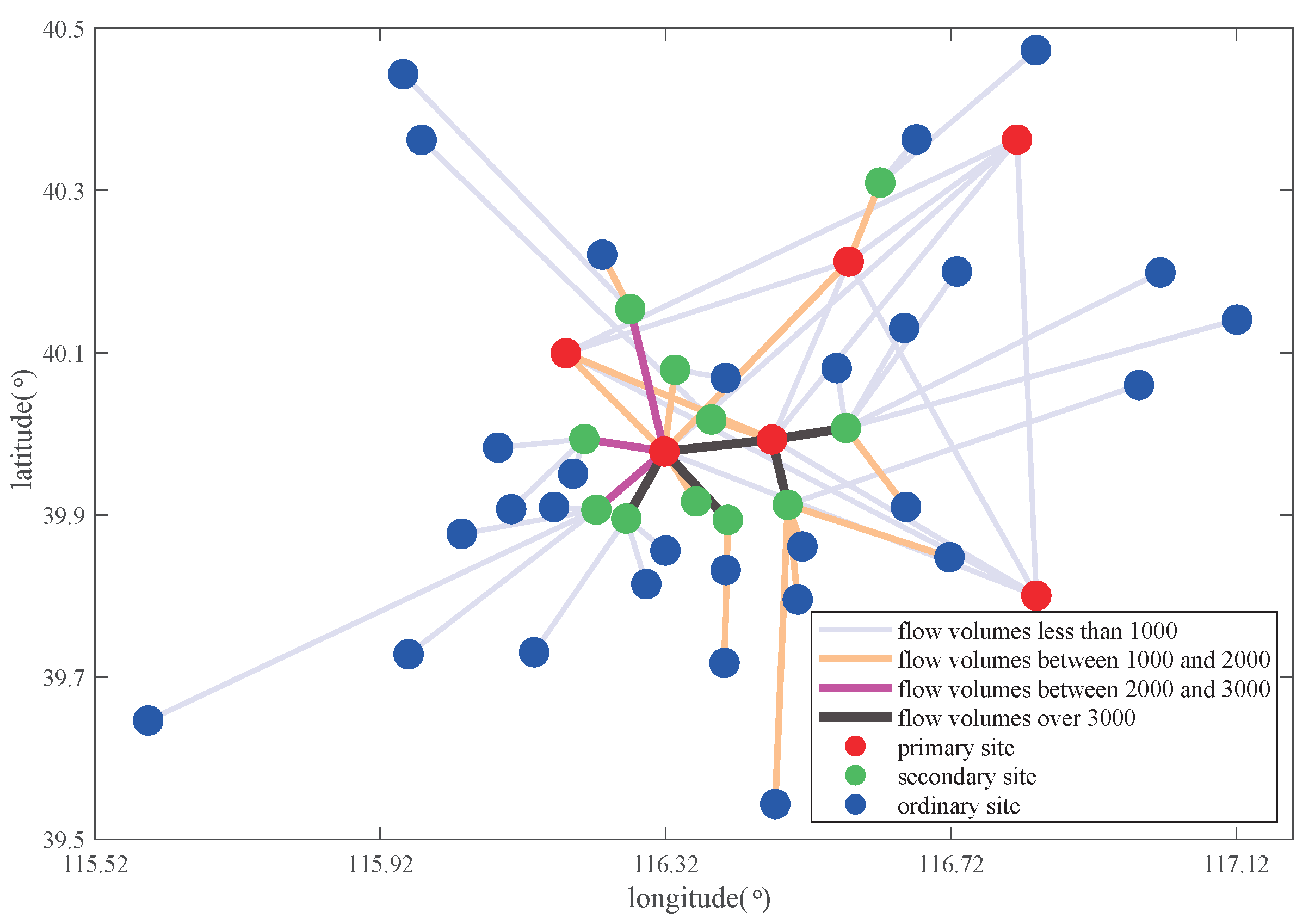
- A typical three-level hierarchy is adopted to service UAS traffic demand at multiple scales, i.e., UAS demand sites are categorized into primary, secondary, and ordinary sites, and route functions between pairs of sites are classified as the main route, trunk route, and branch route correspondingly.
- (2)
- A multi-objective transportation–construction-efficient model is formulated to provide informed choices among a range of Pareto-optimal solutions, where operational constraints on the airspace hazard, the quantity restriction, and the UAS performance limit are also considered in the model.
- (3)
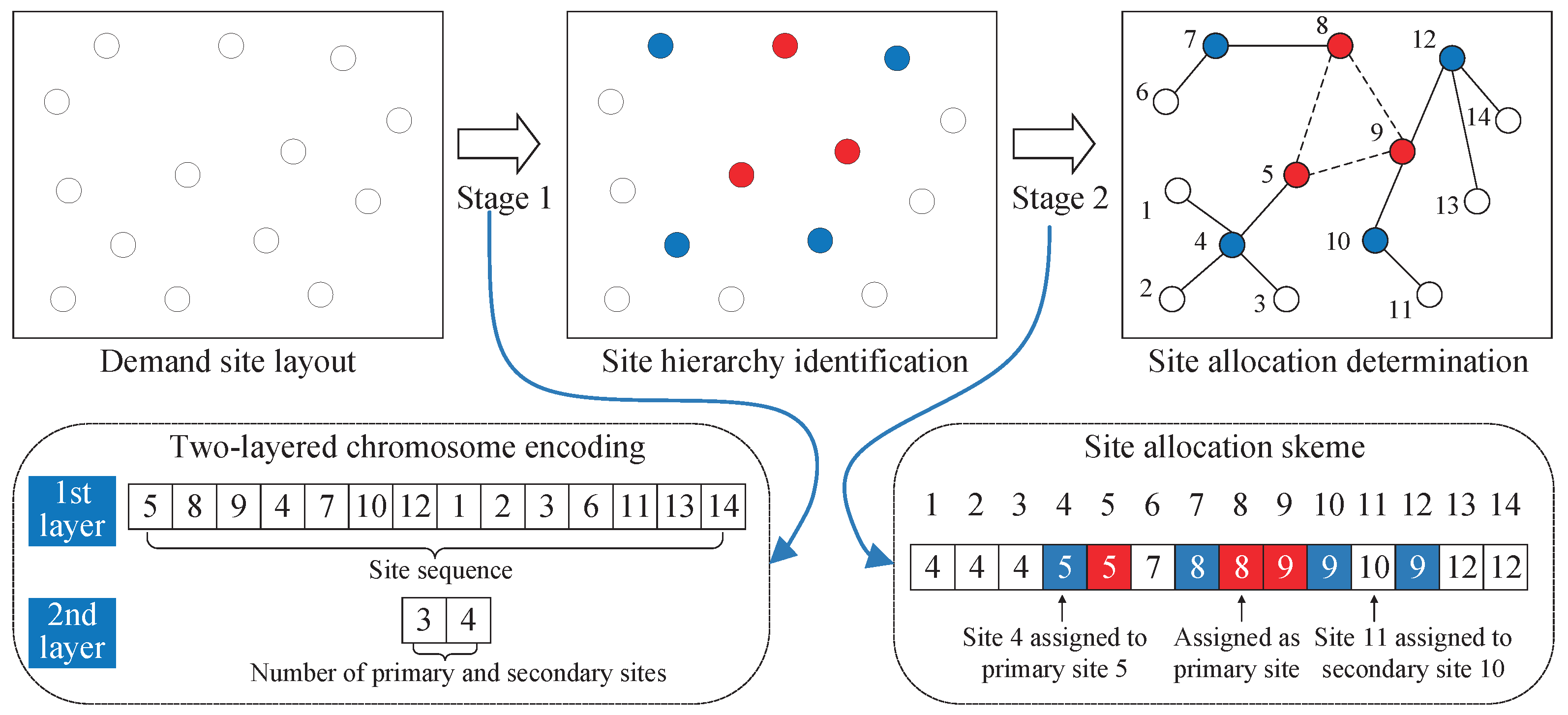
- For the sake of computation, a bi-level hybrid Simulated Annealing Genetic Algorithm (HSAGA) is proposed for the balance between exploitation and exploration, where a genetic global search framework is hybridized with two problem-specific local search operators.
2. Mathematical Formulations
2.1. General Assumption
- The proposed UAS route network is supposed to be organized hierarchically. That is, except the primary sites that are fully connected, each site location of a lower level should be directly allocated to exactly one site in the next higher level. Cross-stage transportation that bypasses sites higher in the hierarchy is not allowed.
- The limit of site capacity was not considered in this paper, as was the route capacity. The effect of possible UAS congestion due to capacity constraints can be relaxed by considering a parallel multi-lane paradigm in a future study.
- Given that crossing altitudes will cause traffic complexity in another dimension, the route network was designated at a constant altitude with routes at the same flight level.
- Maintenance and UAS battery charging (or refueling) were assumed to be available both at the primary and secondary sites, given the concern about UAS operational range and endurance.
2.2. Data and Notation
- (1)
- The potential air route network was modeled as a directed graph , where is the set of heterogeneous site locations and is the set of all levels of routes that may be included in the final topology. Each site location i in can only be labeled as one of the three classes: primary site if , secondary site if , and ordinary site if . Correspondingly, for every route in (Route is equivalent to since two-way traffic is allowed. For simplicity, route was replaced by in this paper for site allocation denotation, i.e., route exists if and only if site i is allocated to site j), it belongs to one of the following three types: main route if connects two primary sites , trunk route if connects one secondary site and one primary site , and branch route if connects one ordinary site and one secondary site .
- (2)
- A set of origin–destination (OD) pairs of UAS travel demands is denoted by . Each pair of OD is has an associated demand . The UAS flight path consists of a finite sequence of routes that connects an OD pair, and is a Boolean variable that takes on a value of 1 if route is contained in the path of OD pair w.
- (3)
- The cost of air travel per UAS flight in each route is denoted by , depending on the length of the route and the route type. The length of the route is computed by multiplying the Euclidean distance between the connected site pair i and j with a detour penalty factor . That is because some airspace (e.g., airspace near the airfield) may be hazardous to UAS operations, thus requiring a detour around the barrier. If route traverses a hazardous airspace, , otherwise . The certain route type will also influence the travel cost. By concentrating traffic to produce the economies of scale of the flow (e.g., sharing of en route traffic service charges [27,28]), the unit costs per distance on main routes, trunk routes, and branch routes are , , and C, respectively. and are the discount rates of the traffic service price, .
2.3. Mathematical Optimization Model
3. Bi-Level Solution Algorithm
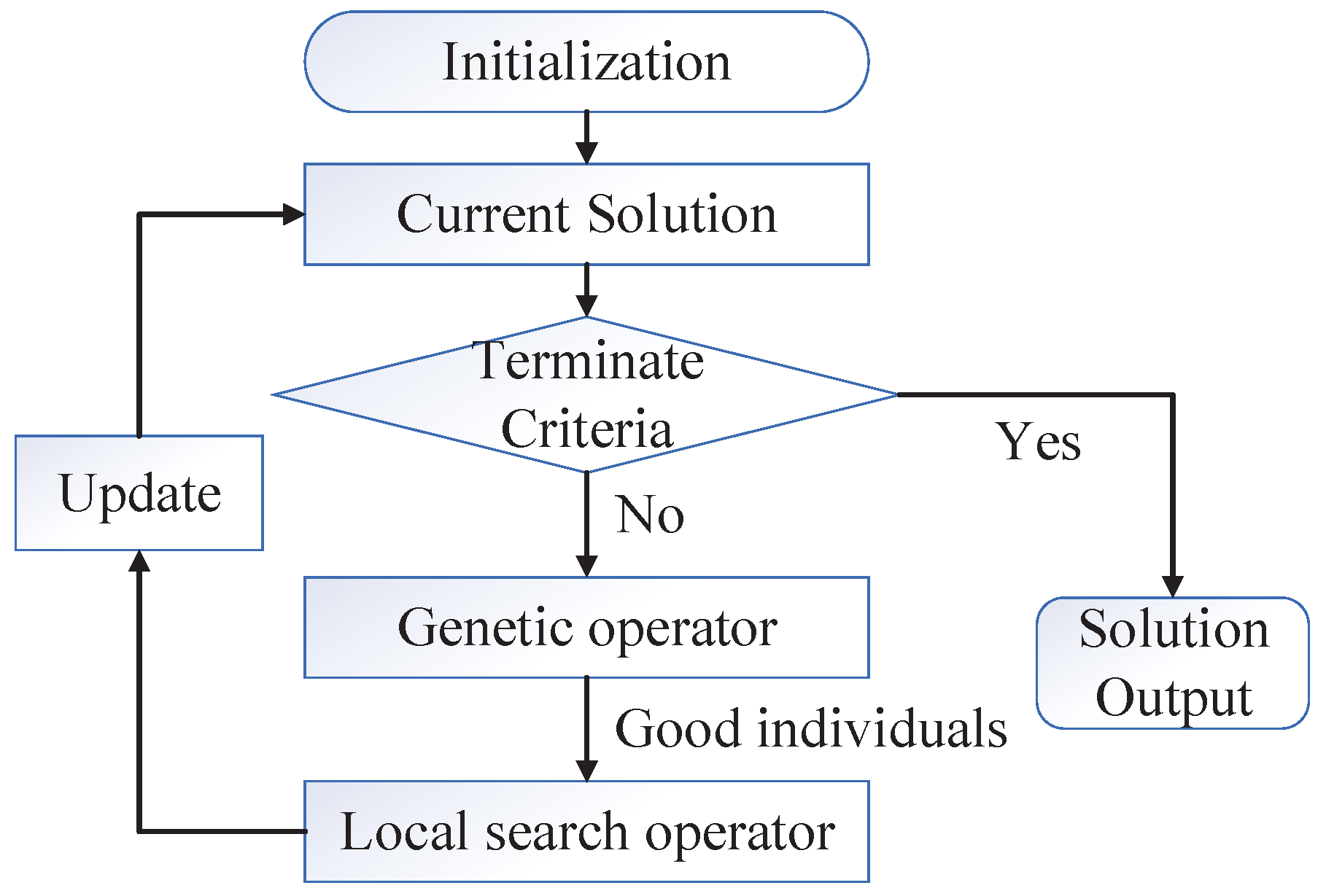
3.1. Algorithm Principle
3.2. Genetic Operator
- Select: The tournament selection strategy is applied to ensure that the fittest candidates from the current generation are passed on to the next generation.
- Cross: The single-point crossing strategy is used by randomly selecting the same position on two parent chromosomes. Then, the genetic information to the left (or right) of this point is swapped between the two parents to produce offspring chromosomes. Yet, it is worth noting that two parts of the information are contained in the chromosome: the site hierarchy and the allocation relation. If two chromosomes are randomly crossed, the new chromosomes may not have practical significance. Therefore, after the single-point crossover process is completed, check whether each newly generated offspring meets the topology constraints and, then, make appropriate adjustments to the new offspring.
- Mutate: The single-point variation is adopted if the mutation probability is satisfied. Randomly select a chromosome as the parent, and modify its gene to a new value under the topology constraints.
3.3. Local Search Operator
- Swap: Hierarchies of two demand sites within the same cluster (one site is allocated to the other) are swapped according to their values. For instance, if a primary site and a secondary site are selected, compare their values. Then, the primary site with a lower value becomes a secondary site, while the previous secondary site with a higher value is changed to be the primary site.where and are the UAS traffic volume that enters site i or leaves it, respectively.In principle, the swap operator tries to raise the hierarchy of a site on the condition that: (1) its closeness to other sites in the cluster is high; therefore, it can reduce the total costs of collection and distribution within the cluster; (2) its closeness to other clusters is high; therefore, it can reduce transfer costs; (3) the total amount of the traffic demand that enters it or leaves it is large enough.
- Reallocate: the non-primary site with the largestvalue of is selected and reallocated to one of the other clusters.In other words, the reallocate operator aims to detach sites that are far from other sites in the same cluster, but close to other primary sites. Although the reallocate operator will not necessarily achieve the best site allocation, it ensures that sites with a close distance to each other are placed in one cluster.
3.4. Solution Updating
| Algorithm 1 Pseudo-code of the HSAGA. |
1: Input: set of demand sites , UAS OD pairs , population size , maximum generation 2: % to initialize the chromosome population 3: set chromosome index , generation 4: while do 5: randomly construct a solution 6: if all topology constraints satisfied, then 7: 8: end if 9: end while 10: % of main procedure 11: while do 12: % to apply global genetic operator to 13: 14: % to apply local search operator to good individuals in 15: set initial temperature , reduction factor , predefined , weighted vector 16: repeat 17: generate a random number 18: if , then 19: 20: else 21: 22: end if 23: % to apply solution updating 24: 25: if , then 26: accept 27: else 28: accept with probability 29: end if 30: 31: until 32: g+=1 33: end while 34: Output: final population of site location–allocation in hierarchical UAS route network |
4. Result and Discussion
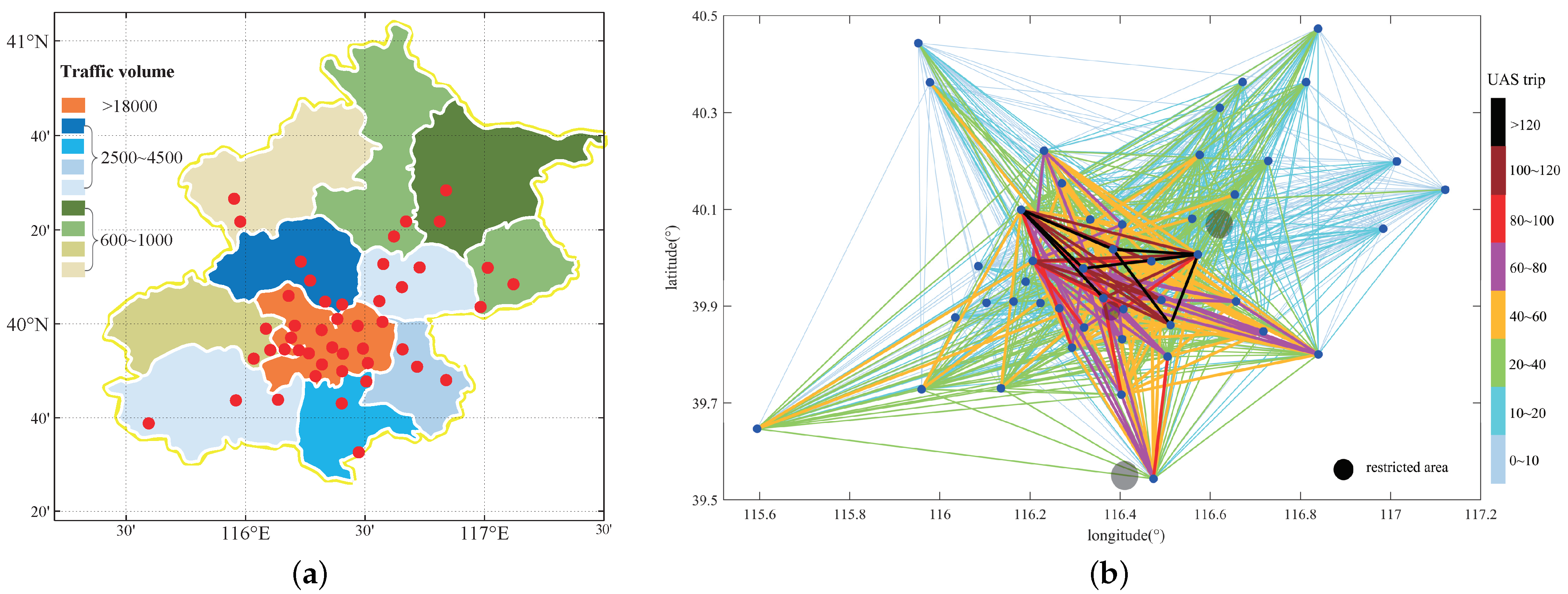
4.1. Simulation Design
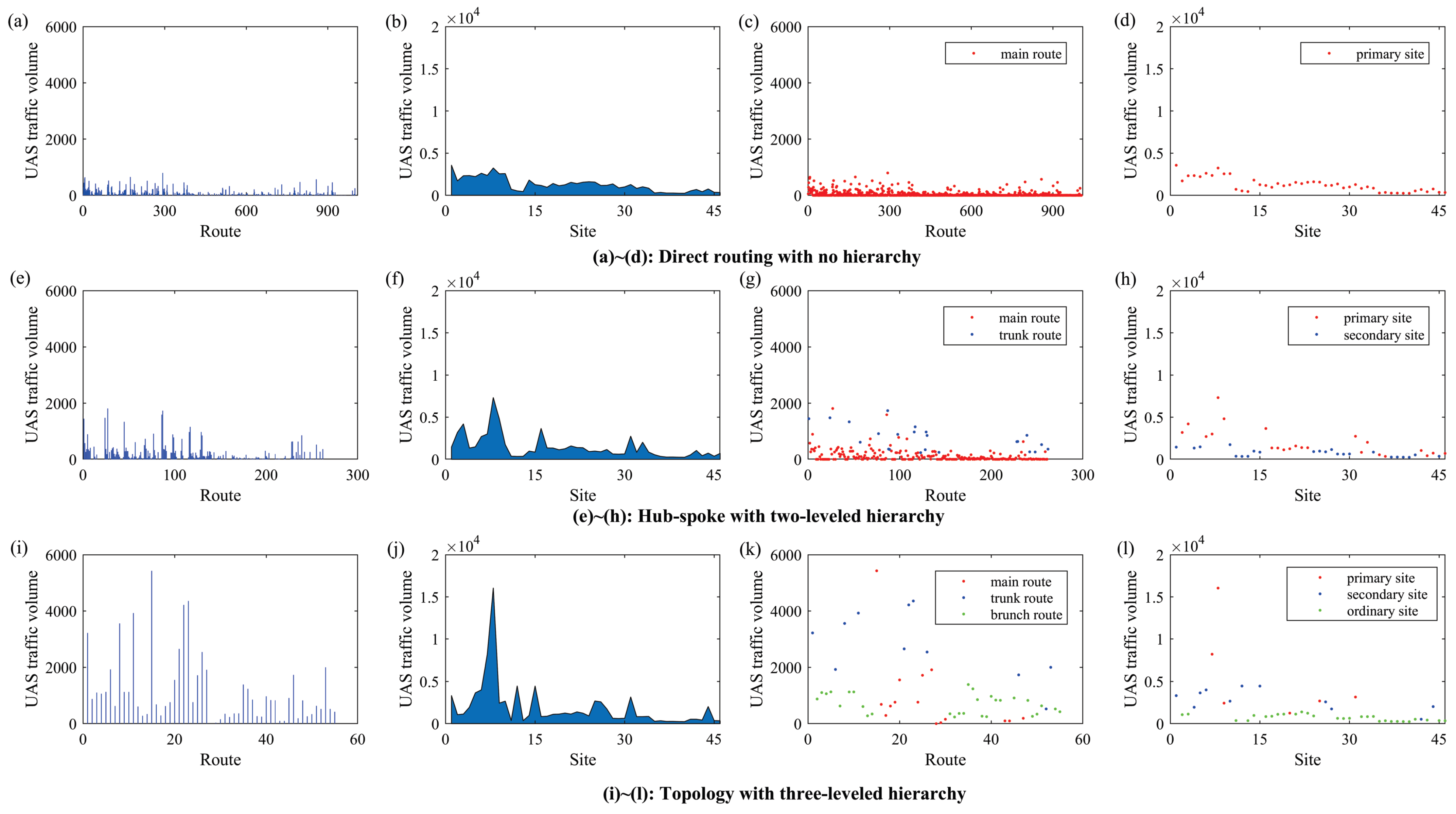
- The effectiveness of the three-level hierarchical structure: (1) direct routing (no hierarchy), (2) hub-and-spoke (two-level hierarchy), and (3) the proposed hierarchical topology (three-level hierarchy).
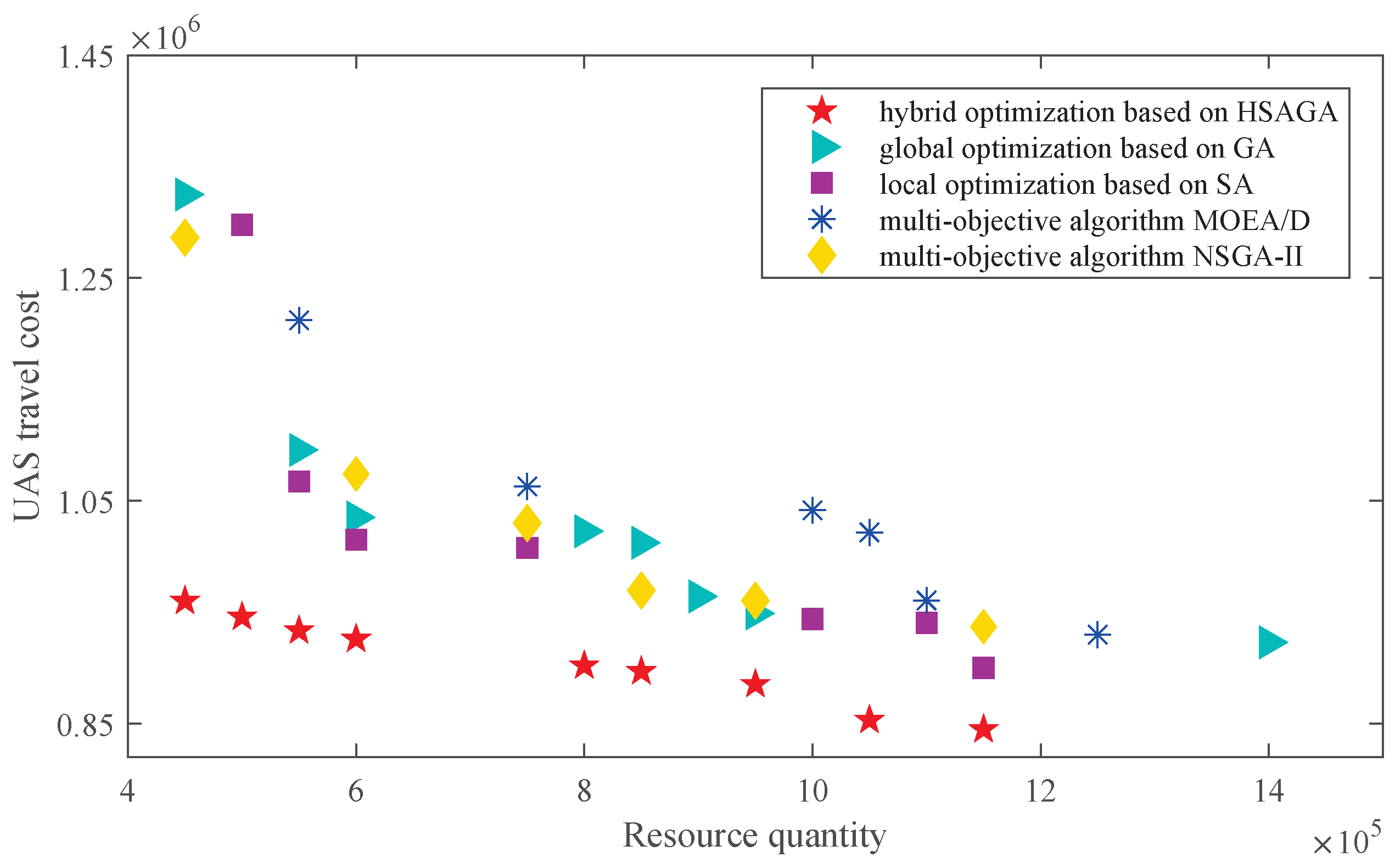
- The effectiveness of the global–local hybridization strategy: (1) pure global optimization based on the GA, (2) pure local optimization based on SA, and (3) the proposed hybrid global–local optimization based on the HSAGA.
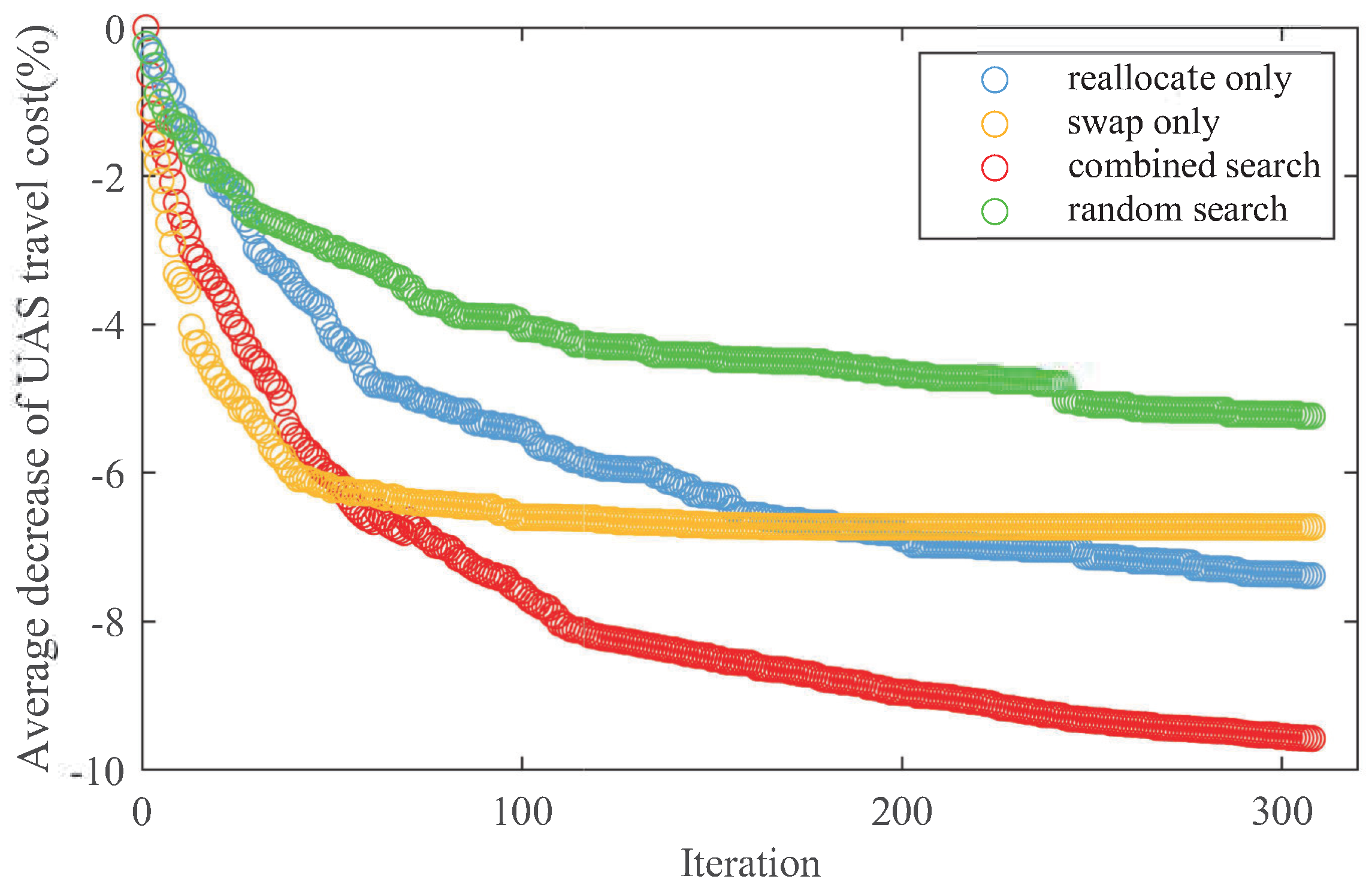
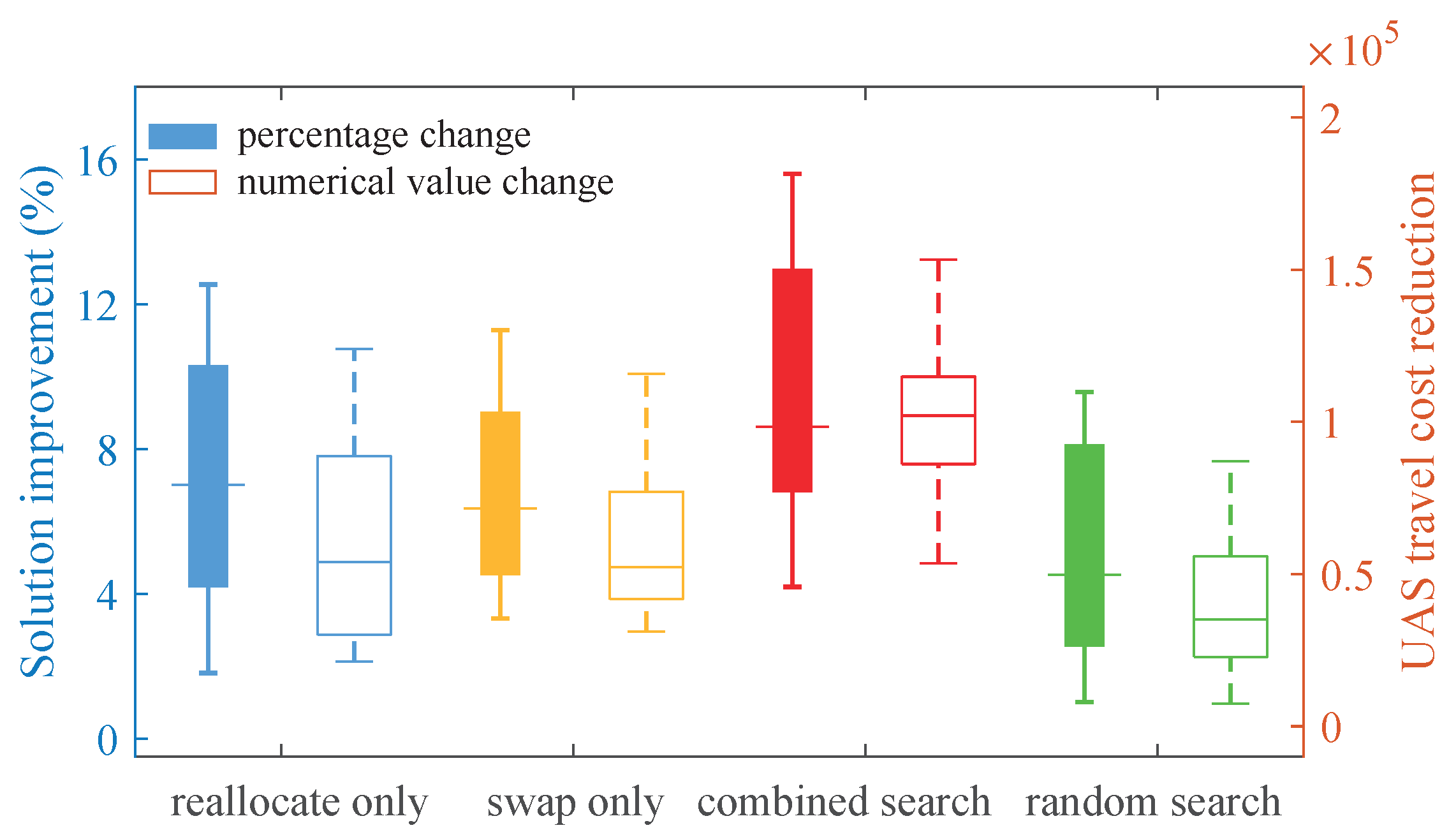
- The effectiveness of the problem-specific local search operator: (1) random search, (2) swap-only operator, (3) reallocate-only operator, and (4) combined search with both swap and reallocate operators.
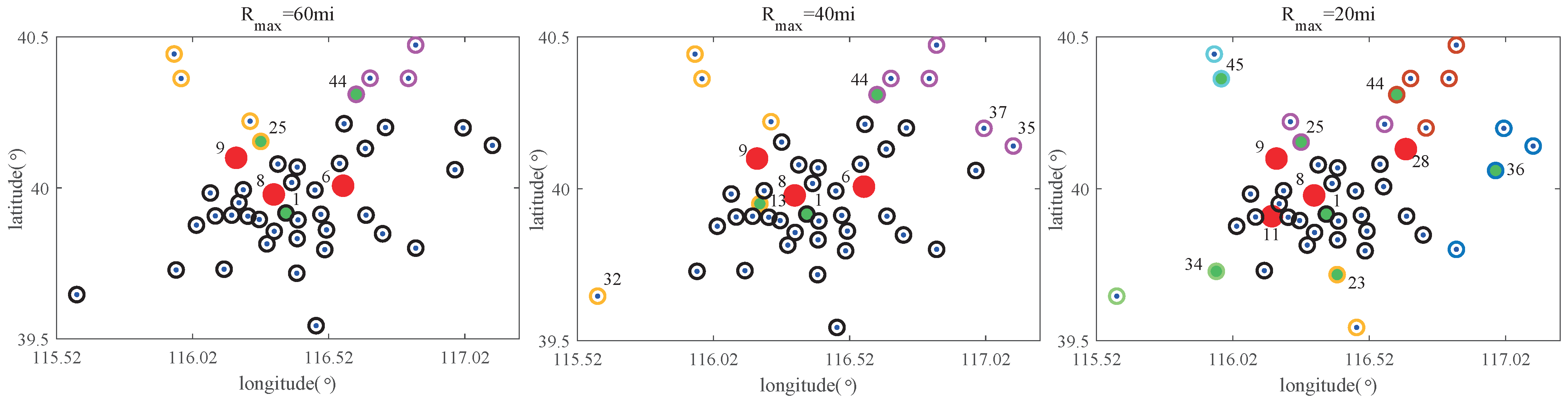
- The sensitivity analysis of critical parameters: the length restriction on site allocation .
4.2. Validation of the Three-Level Hierarchy
4.3. Validation of the HSAGA
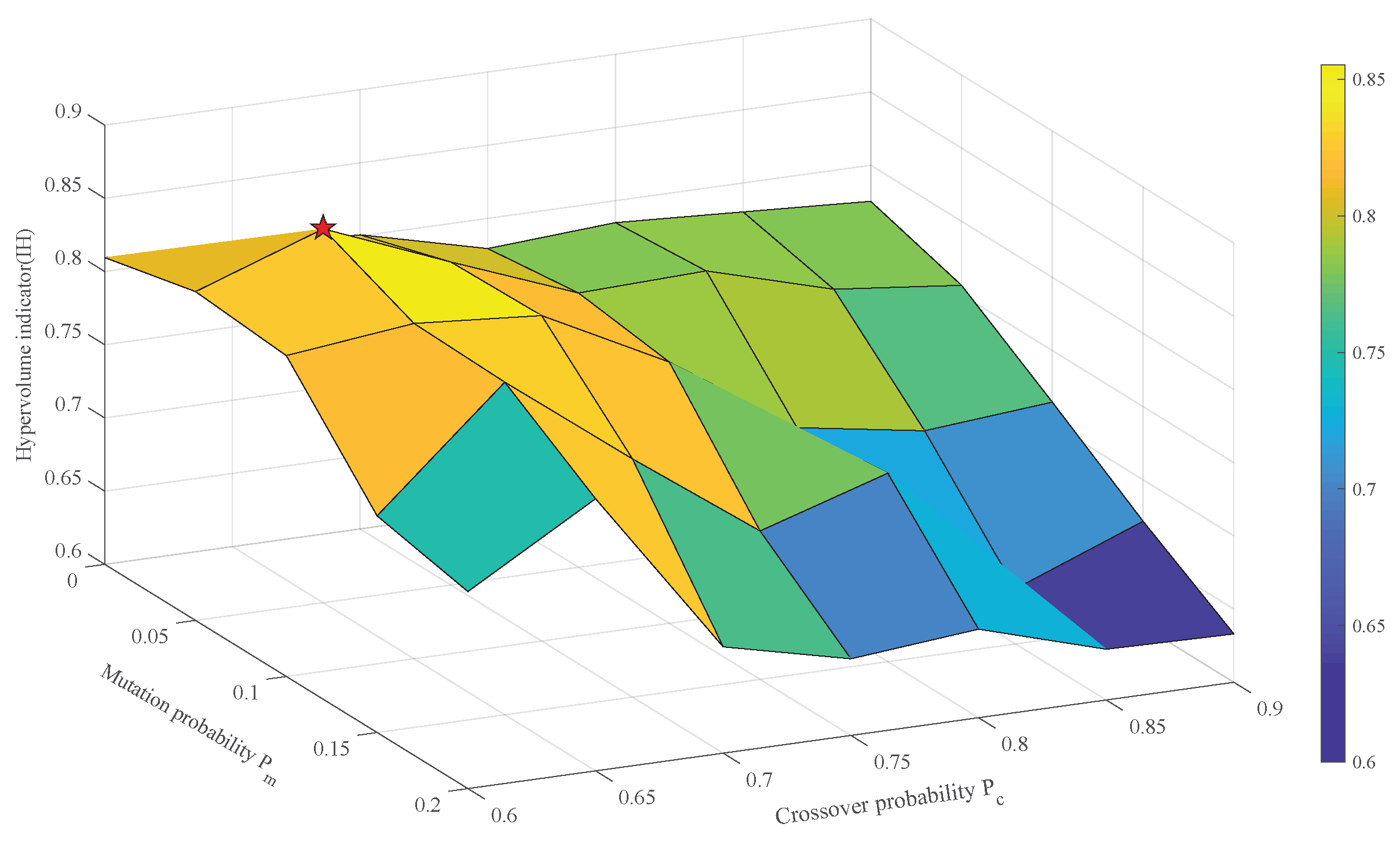
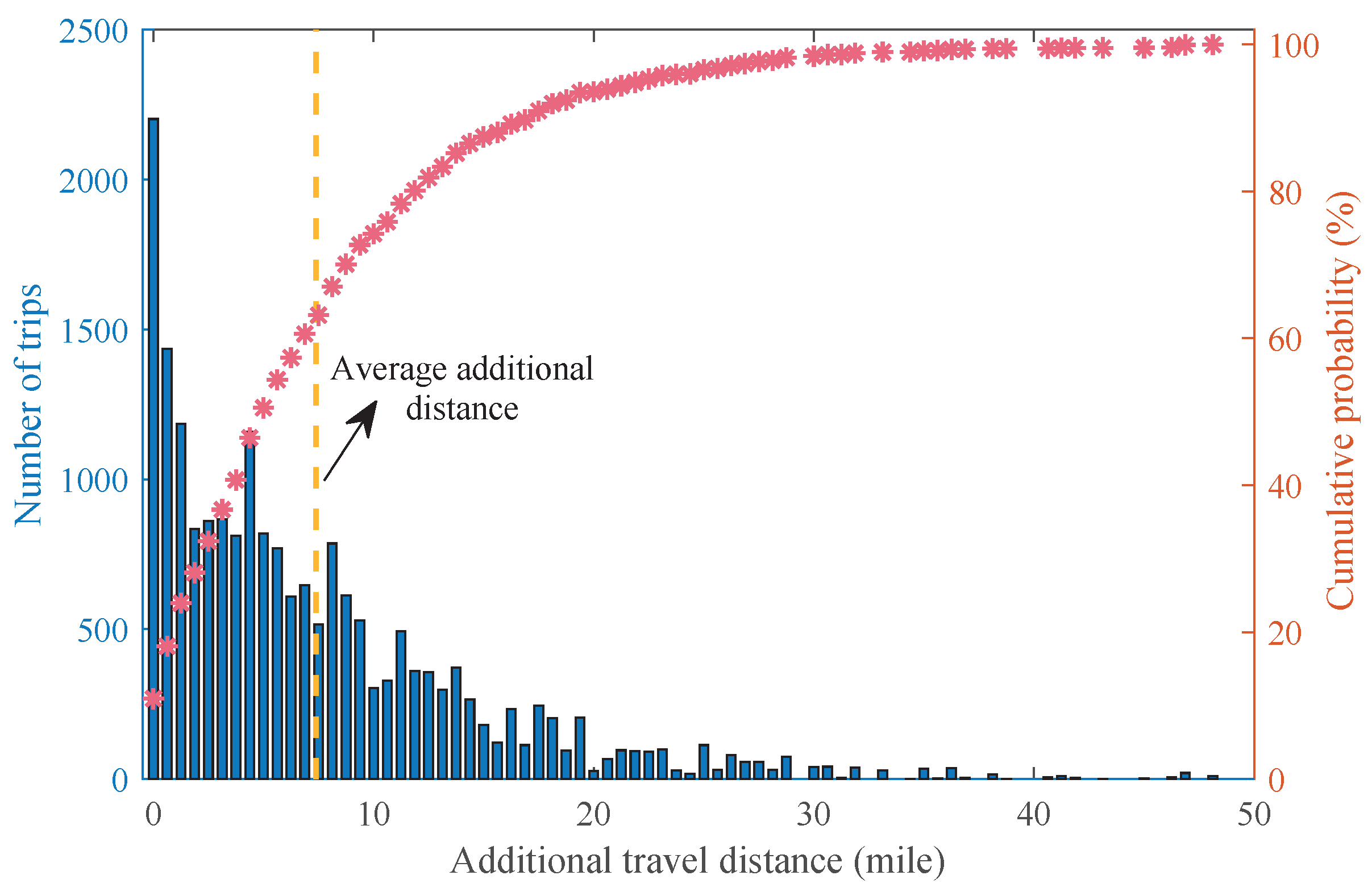
4.4. Sensitivity Analysis of Critical Parameter
4.5. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Federal Aviation Administration. FAA Aerospace Forecast Fiscal Years 2022–2042; Federal Aviation Administration: Washington, DC, USA, 2022.
- Willey, L.C.; Salmon, J.L. A method for urban air mobility network design using hub location and subgraph isomorphism. Transp. Res. Part C Emerg. Technol. 2021, 125, 102997. [Google Scholar] [CrossRef]
- Decker, C.; Chiambaretto, P. Economic policy choices and trade-offs for Unmanned aircraft systems Traffic Management (UTM): Insights from Europe and the United States. Transp. Res. Part A Policy Pract. 2022, 157, 40–58. [Google Scholar] [CrossRef]
- Kopardekar, P. Unmanned Aerial System (UAS) Traffic Management (UTM): Enabling Civilian Low-Altitude Airspace and Unmanned Aerial System Operations. NASA Tech. Rep. 2015. [Google Scholar]
- Federal Aviation Administration. Unmanned Aircraft System (UAS) Traffic Management (UTM) Concept of Operations v2.0; Federal Aviation Administration: Washington, DC, USA, 2022.
- Bauranov, A.; Rakas, J. Designing airspace for urban air mobility: A review of concepts and approaches. Prog. Aerosp. Sci. 2021, 125, 100726. [Google Scholar] [CrossRef]
- Bulusu, V.; Polishchuk, V. A threshold based airspace capacity estimation method for UAS traffic management. In Proceedings of the 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; pp. 1–7. [Google Scholar]
- Cho, J.; Yoon, Y. How to assess the capacity of urban airspace: A topological approach using keep-in and keep-out geofence. Transp. Res. Part C Emerg. Technol. 2018, 92, 137–149. [Google Scholar] [CrossRef]
- Jang, D.S.; Ippolito, C.A.; Sankararaman, S.; Stepanyan, V. Concepts of airspace structures and system analysis for uas traffic flows for urban areas. In Proceedings of the AIAA Information Systems-AIAA Infotech@ Aerospace, Grapevine, TX, USA, 9–13 January 2017; p. 0449. [Google Scholar]
- Sunil, E.; Hoekstra, J.; Ellerbroek, J.; Bussink, F.; Nieuwenhuisen, D.; Vidosavljevic, A.; Kern, S. Metropolis: Relating airspace structure and capacity for extreme traffic densities. In Proceedings of the ATM Seminar 2015, 11th USA/EUROPE Air Traffic Management R&D Seminar, Lisbon, Portugal, 23–26 June 2015; pp. 1–11. [Google Scholar]
- Sacharny, D.; Henderson, T.C.; Marston, V.V. Lane-Based Large-Scale UAS Traffic Management. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18835–18844. [Google Scholar] [CrossRef]
- Pang, B.; Tan, Q.; Ra, T.; Low, K.H. A risk-based UAS traffic network model for adaptive urban airspace management. In Proceedings of the AIAA Aviation 2020 Forum, Online, 15–19 June 2020; p. 2900. [Google Scholar]
- Balachandran, S.; Narkawicz, A.; Muñoz, C.; Consiglio, M. A path planning algorithm to enable well-clear low altitude UAS operation beyond visual line of sight. In Proceedings of the Twelfth USA/Europe Air Traffic Management Research and Development Seminar (ATM2017), Seattle, WA, USA, 26–30 June 2017; p. 26. [Google Scholar]
- Yin, C.; Xiao, Z.; Cao, X.; Xi, X.; Yang, P.; Wu, D. Offline and online search: UAV multiobjective path planning under dynamic urban environment. IEEE Internet Things J. 2017, 5, 546–558. [Google Scholar] [CrossRef]
- Peng, X.; Bulusu, V.; Sengupta, R. Hierarchical Vertiport Network Design for On-Demand Multi-modal Urban Air Mobility. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–8. [Google Scholar]
- Wang, Z.; Delahaye, D.; Farges, J.L.; Alam, S. Route network design in low-altitude airspace for future urban air mobility operations A case study of urban airspace of Singapore. In Proceedings of the International Conference on Research in Air Transportation (ICRAT 2020), Tampa, FL, USA, 23–26 June 2020; pp. 1–8. [Google Scholar]
- Zhai, W.; Han, B.; Li, D.; Duan, J.; Cheng, C. A low-altitude public air route network for UAV management constructed by global subdivision grids. PLoS ONE 2021, 16, e0249680. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Liao, X.; Tan, J.; Ye, H.; Lu, H. Recent research progress of unmanned aerial vehicle regulation policies and technologies in urban low altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar] [CrossRef]
- Yerra, B.M.; Levinson, D.M. The emergence of hierarchy in transportation networks. Ann. Reg. Sci. 2005, 39, 541–553. [Google Scholar] [CrossRef]
- Xu, C.; Liao, X.; Ye, H.; Yue, H. Iterative construction of low-altitude UAV air route network in urban areas: Case planning and assessment. J. Geogr. Sci. 2020, 30, 1534–1552. [Google Scholar] [CrossRef]
- Sales-Pardo, M.; Guimera, R.; Moreira, A.A.; Amaral, L.A.N. Extracting the hierarchical organization of complex systems. Proc. Natl. Acad. Sci. USA 2007, 104, 15224–15229. [Google Scholar] [CrossRef] [PubMed]
- Pels, E. Optimality of the hub–spoke system: A review of the literature, and directions for future research. Transp. Policy 2021, 104, A1–A10. [Google Scholar] [CrossRef]
- Alumur, S.A.; Kara, B.Y.; Karasan, O.E. Multimodal hub location and hub network design. Omega 2012, 40, 927–939. [Google Scholar] [CrossRef]
- Alessandretti, L.; Natera Orozco, L.G.; Saberi, M.; Szell, M.; Battiston, F. Multimodal urban mobility and multilayer transport networks. Environ. Plan. Urban Anal. City Sci. 2022, 50, 2038–2070. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, H.; Li, H.; Zhou, J. Design of a Multi-Layer Hub-and-Spoke Intra-City Delivery Network That Combines Aboveground and Metro Transport. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4418775 (accessed on 8 May 2023).
- Wu, Z.; Zhang, Y. Integrated Network Design and Demand Forecast for On-Demand Urban Air Mobility. Engineering 2021, 7, 473–487. [Google Scholar] [CrossRef]
- Housa, J.; Materna, M. Analysis of the Air Navigation Service Charging System in the USA and Canada; University of Zilina: Žilina, Slovakia, 2022; pp. 114–121. [Google Scholar]
- Grebenšek, A.; Kosel, T. Is economy of scale in air navigation services provision really always the best choice? In Proceedings of the 2015 International Conference on Air Transportation (INAIR), Singapore, 2–5 July 2015; pp. 1–7. [Google Scholar]
- Alumur, S.; Kara, B.Y. Network hub location problems: The state of the art. Eur. J. Oper. Res. 2008, 190, 1–21. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D., Jr.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Asian Development Bank Travel Demand Management Options in Beijing; Asian Development Bank: Sydney, Australia, 2017.
- Du, K.L.; Swamy, M.; Du, K.L.; Swamy, M. Simulated annealing. In Search and Optimization by Metaheuristics: Techniques and Algorithms Inspired by Nature; Birkhäuser: Cham, Switzerland, 2016; pp. 29–36. [Google Scholar]

| Notations | Explanations |
|---|---|
| Sets | |
| Air route network | |
| Set of demand sites | |
| Set of air routes | |
| Set of primary sites, | |
| Set of secondary sites, | |
| Set of ordinary sites, , | |
| Set of origin–destination (OD) pairs | |
| Variables | |
| =1 if site i is allocated to site j, otherwise 0 | |
| Flow on route connecting sites i and j | |
| Demand between OD pair w | |
| =1 if route is contained in the path of OD pair w, otherwise 0 | |
| Euclidean distance between sites i and j | |
| Cost of air travel per UAS flight | |
| Detour penalty factor, | |
| =1 if site i is labeled as primary site (), otherwise 0 | |
| =1 if site i is labeled as secondary site (), otherwise 0 | |
| Symbols | |
| Upper limit of number of primary sites, | |
| Upper limit of number of secondary sites, | |
| Resource required to establish a primary site | |
| Resource required to establish a secondary site | |
| Maximum operational range of UAS | |
| C | Travel cost per distance on branch routes |
| Travel cost per distance on main routes | |
| Travel cost per distance on trunk routes | |
| Notations | Explanations |
|---|---|
| Cluster of secondary and ordinary sites that are attached to one same primary site m, | |
| =m if site i belongs to and is either directly () or indirectly () | |
| attached to primary site | |
| Internal closeness of site i, | |
| External closeness of site i, | |
| UAS traffic volume entering site i, | |
| UAS traffic volume leaving site i, |
| Parameter | Value |
|---|---|
| UAS cruise speed (mi) | 150 |
| Detour penalty | 1.2 |
| Maximum number of primary sites | 8 |
| Maximum number of secondary sites | 12 |
| Discount rate in main route | 0.65 |
| Discount rate in trunk route | 0.75 |
| Resource quantity per primary site | 100,000 |
| Resource quantity per secondary site | 50,000 |
| Length restriction on site allocation (mi) | 60 |
| Population size | 30 |
| Maximum generation | 150 |
| Crossover probability | 0.65 |
| Mutation probability | 0.05 |
| Initial temperature (C) | 100 |
| Cooling factor | 0.98 |
| Final temperature (C) | 0.2 |
| Mode of Network | Number of Sites | Number of Routes | UAS Travel Cost | Resource | ||||
|---|---|---|---|---|---|---|---|---|
| Primary | Secondary | Ordinary | Main | Trunk | Branch | (Million) | (Million) | |
| direct routing with no hierarchy | 46 | - | - | 1005 | - | - | 0.52 | 4.60 |
| hub-and-spoke with two-level hierarchy | 24.75 | 21.25 | - | 345.88 | 21.25 | - | 0.61 | 3.54 |
| topology with three-level hierarchy | 4 | 7.33 | 34.67 | 6.56 | 7.33 | 34.67 | 0.90 | 0.77 |
| Optimization Strategy | Metric | IH | ID | Time (Min) | |
|---|---|---|---|---|---|
| global optimization based on GA | mean | 0.649 | 0.016 | 0.641 | 92.48 |
| std | 0.017 | 0.010 | 0.110 | 2.95 | |
| best | 0.671 | 0.009 | 0.550 | 90.45 | |
| local optimization based on SA | mean | 0.659 | 0.026 | 0.670 | 88.10 |
| std | 0.013 | 0.003 | 0.059 | 3.82 | |
| best | 0.666 | 0.018 | 0.632 | 84.21 | |
| hybrid optimization based on HSAGA | mean | 0.897 | 0.013 | 0.606 | 111.03 |
| std | 0.015 | 0.004 | 0.079 | 3.48 | |
| best | 0.911 | 0.006 | 0.499 | 105.69 | |
| multi-objective optimization based on MOEA/D | mean | 0.630 | 0.033 | 0.703 | 103.68 |
| std | 0.012 | 0.006 | 0.100 | 3.09 | |
| best | 0.677 | 0.021 | 0.600 | 92.00 | |
| multi-objective based on NSGA-II | mean | 0.708 | 0.019 | 0.479 | 120.95 |
| std | 0.042 | 0.009 | 0.161 | 3.64 | |
| best | 0.744 | 0.007 | 0.338 | 113.07 |
| Property | = 60 mi | = 40 mi | = 20 mi |
|---|---|---|---|
| Primary site No. | 3 (6/8/9) | 3 (6/8/9) | 4 (8/9/11/28) |
| Secondary site No. | 3 (1/25/44) | 3 (1/13/44) | 7 (1/23/25/34/36/44/45) |
| Resource quantity (mill.) | 0.45 | 0.45 | 0.75 |
| UAS travel cost (mill.) | 0.96 | 1.00 | 0.97 |
| Additional distance (avg.) | 7.64 mile | 8.75 mile | 10.78 mile |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Nie, L.; Xu, G.; Li, Y.; Guan, X. Multi-Objective Design of UAS Air Route Network Based on a Hierarchical Location–Allocation Model. Sustainability 2023, 15, 16521. https://doi.org/10.3390/su152316521
Liu Z, Nie L, Xu G, Li Y, Guan X. Multi-Objective Design of UAS Air Route Network Based on a Hierarchical Location–Allocation Model. Sustainability. 2023; 15(23):16521. https://doi.org/10.3390/su152316521
Chicago/Turabian StyleLiu, Zhaoxuan, Lei Nie, Guoqiang Xu, Yanhua Li, and Xiangmin Guan. 2023. "Multi-Objective Design of UAS Air Route Network Based on a Hierarchical Location–Allocation Model" Sustainability 15, no. 23: 16521. https://doi.org/10.3390/su152316521
APA StyleLiu, Z., Nie, L., Xu, G., Li, Y., & Guan, X. (2023). Multi-Objective Design of UAS Air Route Network Based on a Hierarchical Location–Allocation Model. Sustainability, 15(23), 16521. https://doi.org/10.3390/su152316521