
A High Speed MPPT Control Utilizing a Hybrid PSO-PID Controller under Partially Shaded Photovoltaic Battery Chargers

 , ,
, ,  ,
,  ,
, 

Abstract
:1. Introduction
- A conventional PSO may be able to monitor the GP under a time-invariant shading pattern with unwanted volatility at a steady state. Although it takes longer to catch up to the GP, it is impossible to follow the dynamic GP under time-variation SPs and remains at the initial GP.
- Previous studies have tracked the GP under PSC; however, they have slow convergence to the GP and high oscillation around the GP, and the tracking time is very long.
- Some of these MPPT methods work successfully under uniform and PSC conditions. However, the use of the algorithm individually has some drawbacks and limitations.
- A hybrid MPPT approach based on the PSO-PID method is proposed to combine the ability of the PSO to ensure GP operation with the convergence speed of the PID controller. The PV arrays’ accuracy and efficacy are improved by hybrid MPPT techniques under unpredictable and changing environmental conditions.
- The hybridization (PSO-PID) MPPT algorithm for PV systems under normal and PSC conditions provides high efficiency, quick convergence, zero oscillation around the steady state, and low complexity.
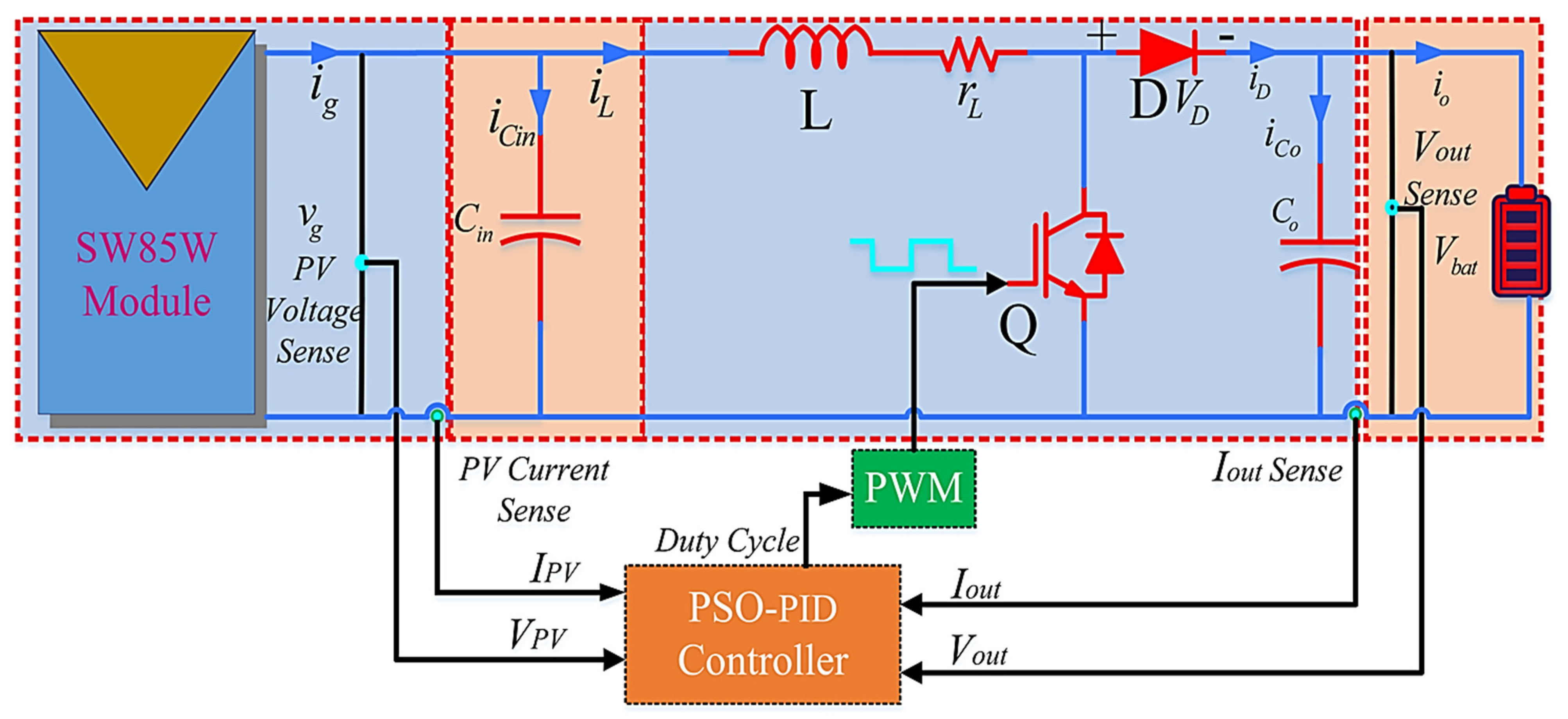
- In order to increase the system response time and shorten the tracking process, the robust design of the PID controller with the PSO algorithm is adopted for boost converter in this article. The controller uses the reference voltage provided by the MPPT algorithm as an input to compute the matching duty cycle. When charging batteries, for example, the regulated voltage is employed. The comparator creates an error signal by comparing the output voltage to the reference voltage, and then it sends that error signal to the PID controller. The PWM generator produces the PWM signals for the power module after being sent to the PID controller, which is utilized for regulating the voltage signal.
- The performance of the combined PSO-PID algorithm is examined and compared with conventional PSO and BA-MPPT methods for validation purposes.
2. Description of the Considered System
2.1. Modeling and Description of PV Systems
2.2. Modeling of the PV System
2.2.1. The Model of PV Panel
2.2.2. Modeling the PV Panel’s Linearization
2.2.3. Transfer Function for PV Systems
3. Modeling of the Photovoltaic System under PSC
4. Hybrid PSO-PID Technique
- The particle positions are initialized at 20%, 50%, and 80% of Voc. The quantities, α, β, and θ are initialized throughout the algorithm. The best velocity vector Gbest and individual best Pbest values are initialized to zero.
- The converter’s duty cycle is calculated for each particle position using Equation (21) and the resulting pulse is sent to the converter switch one at a time.
- 3.
- The panel voltage VPV and current IPV are recorded after a delay, and the power for each particle position is computed using the formula PPV = VPV × IPV.
- 4.
- The location of the particle where the power PPV is greatest is recognized as the optimal position of the particle.
- 5.
- The global best is calculated as the position with the highest PPV among the personal best.
- 6.
- Then Equation (17) is used to determine the velocity vector, and Equation (18) is used to update the position of the particle.
- 7.
- The convergence condition is investigated. When all the values in the velocity vector are less than a tolerance limit or when the maximum number of iterations is reached, the algorithm is called convergence. If the convergence requirements are met, the global optimal value is generated. Otherwise, for the new position of the particles, steps 2–7 are repeated.
5. Simulation Results and Discussion
5.1. Proposed PSO-PID under PSC
5.2. Proposed PSO-PID under Fast Change of Irradiation
5.3. Proposed PSO-PID under Fast Variation of Temperature
5.4. Proposed PSO-PID under Abrupt Changes in Radiation and Temperature
5.5. Proposed PSO-PID Slow Changes in Radiation and Temperature
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- AL-wesabi, I.; Zhijian, F.; Bosah, C.P.; Dong, H. A review of Yemen’s current energy situation, challenges, strategies, and prospects for using renewable energy systems. Environ. Sci. Pollut. Res. 2022, 29, 53907–53933. [Google Scholar] [CrossRef] [PubMed]
- Cano, A.; Arévalo, P.; Jurado, F. Evaluation of temporal resolution impact on power fluctuations and self-consumption for a hydrokinetic on grid system using supercapacitors. Renew. Energy 2022, 193, 843–856. [Google Scholar] [CrossRef]
- AL-Wesabi, I.; Zhijian, F.; Hussein Farh, H.M.; Al-Shamma’a, A.A.; Dong, H.; M. Al-Shaalan, A.; Kandil, T. Maximum power extraction and DC-Bus voltage regulation in grid-connected PV/BES system using modified incremental inductance with a novel inverter control. Sci. Rep. 2022, 12, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Kang, Y.; Yu, Z.; Duan, S. Comparison of P&O and hill climbing MPPT methods for grid-connected PV converter. In Proceedings of the 2008 3rd IEEE Conference on Industrial Electronics and Applications, Singapore, 3–5 June 2008; pp. 804–807. [Google Scholar] [CrossRef]
- Islam, H.; Mekhilef, S.; Shah, N.B.M.; Soon, T.K.; Seyedmahmousian, M.; Horan, B.; Stojcevski, A. Performance evaluation of maximum power point tracking approaches and photovoltaic systems. Energies 2018, 11, 365. [Google Scholar] [CrossRef] [Green Version]
- Tey, K.S.; Mekhilef, S.; Member, S.; Seyedmahmoudian, M. Improved Differential Evolution-based MPPT Algorithm using SEPIC for PV Systems under Partial Shading Conditions and Load Variation. IEEE Trans. Ind. Inform. 2018, 14, 4322–4333. [Google Scholar] [CrossRef]
- Zaki, A.A.; Rezk, H. Global MPPT based on flower pollination and differential evolution algorithms to mitigate partial shading in building integrated PV system. Sol. Energy 2017, 157, 171–186. [Google Scholar] [CrossRef]
- Fathi, R.; Tousi, B.; Galvani, S. Allocation of renewable resources with radial distribution network reconfiguration using improved salp swarm algorithm. Appl. Soft Comput. 2022, 132, 109828. [Google Scholar] [CrossRef]
- Titri, S.; Larbes, C.; Toumi, K.; Benatchba, K. A new MPPT controller based on the Ant Colony Optimization Algorithm for Photovoltaic Systems under Partial Shading Conditions. Appl. Soft Comput. J. 2017, 58, 465–479. [Google Scholar] [CrossRef]
- Benyoucef, A.S.; Chouder, A.; Kara, K.; Silvestre, S.; Sahed, O.A. Artificial bee colony based algorithm for maximum power point tracking (MPPT) for PV systems operating under partial shaded conditions. Appl. Soft Comput. J. 2015, 32, 38–48. [Google Scholar] [CrossRef]
- Al-Wesabi, I.; Fang, Z.; Hussein Farh, H.M.; Al-Shamma’a, A.A.; Al-Shaalan, A.M.; Kandil, T.; Ding, M. Cuckoo Search Combined with PID Controller for Maximum Power Extraction of Partially Shaded Photovoltaic System. Energies 2022, 15, 2513. [Google Scholar] [CrossRef]
- X, L. An optimizing method based on autonomous animats: Fish-swarm algorithm. Syst. Eng. Pract. 2002, 22, 32–38. [Google Scholar]
- Kumar, C.H.S.; Rao, R.S. A Novel Global MPP Tracking of Photovoltaic System based on Whale Optimization Algorithm. Int. J. Renew. Energy Dev. 2016, 5, 225–232. [Google Scholar] [CrossRef]
- Feroz, A.; Ling, Q.; Javed, M.Y.; Mansoor, M. Novel MPPT techniques for photovoltaic systems under uniform irradiance and Partial shading. Sol. Energy 2019, 184, 628–648. [Google Scholar] [CrossRef]
- Feroz, A.; Mansoor, M.; Ling, Q.; Yin, B.; Javed, M.Y. A Salp-Swarm Optimization based MPPT technique for harvesting maximum energy from PV systems under partial shading conditions. Energy Convers. Energy Convers. Manag. 2020, 209, 112625. [Google Scholar] [CrossRef]
- Ibrahim, A.W.; Shafik, M.B.; Ding, M.; Sarhan, M.A.; Fang, Z.; Alareqi, A.G.; Almoqri, T.; Al-Rassas, A.M. PV maximum power-point tracking using modified particle swarm optimization under partial shading conditions. Chinese J. Electr. Eng. 2020, 6, 106–121. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Al-saud, M.S.; Abokhalil, A.G. A novel scanning bat algorithm strategy for maximum power point tracker of partially shaded photovoltaic energy systems abc dq. Ain Shams Eng. Ain Shams Eng. J. 2020, 11, 1093–1103. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Farh, H.M.H. Dynamic global maximum power point tracking of the PV systems under variant partial shading using hybrid GWO-FLC. Sol. Energy 2019, 177, 306–316. [Google Scholar] [CrossRef]
- Shi, J.; Zhang, D.; Xue, F.; Li, Y.; Qiao, W. Moth-Flame Optimization-Based Maximum Power Point Tracking for Photovoltaic Systems Under Partial Shading Conditions. J. Power Electron. 2019, 19, 1248–1258. [Google Scholar]
- Ibrahim, A.; Ding, M.; Jin, X.; Dai, X.; Abu, M.; Badeaa, M.; Zhou, H. Artificial Neural Network Based Maximum Power Point Tracking for PV System. In Proceedings of the 2019 Chinese Control Conference, Guangzhou, China, 27–30 July 2019; pp. 6559–6564. [Google Scholar]
- Avila, L.; De Paula, M.; Trimboli, M.; Carlucho, I. Deep reinforcement learning approach for MPPT control of partially shaded PV systems in Smart Grids. Appl. Soft Comput. 2020, 97, 106711. [Google Scholar] [CrossRef]
- Ibrahim, A.-W.; Fang, Z.; Ameur, K.; Min, D.; Shafik, M.B.; Al-Muthanna, G. Comparative Study of Solar PV System Performance under Partial Shaded Condition Utilizing Different Control Approaches. Indian J. Sci. Technol. 2021, 14, 1864–1893. [Google Scholar] [CrossRef]
- Shi, J.; Zhang, W.; Zhang, Y.; Xue, F.; Yang, T. MPPT for PV systems based on a dormant PSO algorithm. Electr. Power Syst. Res. 2015, 123, 100–107. [Google Scholar] [CrossRef]
- Lian, K.L.; Jhang, J.H.; Tian, I.S. A maximum power point tracking method based on perturb-and-observe combined with particle swarm optimization. IEEE J. Photovoltaics 2014, 4, 626–633. [Google Scholar] [CrossRef]
- Foster, B.N.; McCray, S.M. A Hybrid Particle Swarm Optimization Algorithm for Maximum Power Point Tracking of Solar Photovoltaic Systems. In Proceedings of the National Conference On Undergraduate Research (NCUR) 2017, Memphis, TN, USA, 6–8 April 2017; pp. 207–214. [Google Scholar]
- Kermadi, M.; Salam, Z.; Ahmed, J.; Berkouk, E.M. An Effective Hybrid Maximum Power Point Tracker of Photovoltaic Arrays for Complex Partial Shading Conditions. IEEE Trans. Ind. Electron. 2019, 66, 6990–7000. [Google Scholar] [CrossRef]
- Hanafiah, S.; Ayad, A.; Hehn, A.; Kennel, R. A hybrid MPPT for quasi-Z-source inverters in PV applications under partial shading condition. In Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Cadiz, Spain, 4–6 April 2017; pp. 418–423. [Google Scholar] [CrossRef]
- Avila, E.; Pozo, N.; Pozo, M.; Dominguez, X. Improved Particle Swarm Optimization Based MPPT for PV Systems under Partial Shading Conditions. In Proceedings of the 2017 IEEE Southern Power Electronics Conference, Puerto Varas, Chile, 4–7 December 2017. [Google Scholar]
- Ram, J.P.; Pillai, D.S.; Rajasekar, N.; Strachan, S.M. Detection and Identification of Global Maximum Power Point Operation in Solar PV Applications Using a Hybrid ELPSO-PO Tracking Technique. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1361–1374. [Google Scholar] [CrossRef] [Green Version]
- Grzesiak, L. Hybrid MPPT Algorithm for PV Systems Under Partially Shaded Conditions Using a Stochastic Evolutionary Search and a Deterministic Hill Climbing. Power Electron. Drives 2017, 2, 49–59. [Google Scholar] [CrossRef]
- Kermadi, M.; Berkouk, E.M. A Hybrid PSO-PI based Maximum Power Point Tracking algorithm using adaptive sampling time strategy. In Proceedings of the 2015 4th International Conference on Electrical Engineering (ICEE), Boumerdes, Algeria, 13–15 December 2015. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Member, S.; Ray, P.K. A Grey Wolf Assisted Perturb & Observe MPPT Algorithm for a PV System. IEEE Trans. Energy Convers. 2016, 8969, 340–347. [Google Scholar] [CrossRef]
- Premkumar, M.; Sumithira, R. Humpback whale assisted hybrid maximum power point tracking algorithm for partially shaded solar photovoltaic systems. J. Power Electron. 2018, 18, 1805–1818. [Google Scholar] [CrossRef]
- Pilakkat, D.; Kanthalakshmi, S. An improved P&O algorithm integrated with artificial bee colony for photovoltaic systems under partial shading conditions. Sol. Energy 2019, 178, 37–47. [Google Scholar] [CrossRef]
- Selvakumar, M.R.; Sujatha, S.P. ROAC: Recursive optimization of Ant colony assisted perturb and observe for a photovoltaic resonant boost converter. Int. J. Eng. Technol. 2018, 7, 150–156. [Google Scholar]
- Shi, J.Y.; Ling, L.T.; Xue, F.; Qin, Z.J.; Li, Y.J.; Lai, Z.X.; Yang, T. Combining incremental conductance and firefly algorithm for tracking the global MPP of PV arrays. J. Renew. Sustain. Energy 2017, 9, 023501. [Google Scholar] [CrossRef]
- Jiang, L.; Maskell, D.L. A simple hybrid MPPT technique for photovoltaic systems under rapidly changing partial shading conditions. In Proceedings of the 2014 IEEE 40th Photovoltaic Specialist Conference (PVSC), Denver, CO, USA, 8–13 June 2014; pp. 782–787. [Google Scholar] [CrossRef]
- Chao, K.H.; Lin, Y.S.; Lai, U.D. Improved particle swarm optimization for maximum power point tracking in photovoltaic module arrays. Appl. Energy 2015, 158, 609–618. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Shamsudin, A.; Amjad, M. A direct control based maximum power point tracking method for photovoltaic system under partial shading conditions using particle swarm optimization algorithm. Appl. Energy 2012, 99, 414–422. [Google Scholar] [CrossRef]
- Venugopalan, R.; Krishnakumar, N.; Sudhakarbabu, T.; Sangeetha, K.; Rajasekar, N. Modified Particle Swarm Optimization technique based Maximum Power Point Tracking for uniform and under partial shading condition. Appl. Soft Comput. J. 2015, 34, 613–624. [Google Scholar] [CrossRef]
- Al-Wesabi, I.; Fang, Z.; Wei, Z.; Dong, H. Direct sliding mode control for dynamic instabilities in dc-link voltage of standalone photovoltaic systems with a small capacitor. Electronics 2022, 11, 133. [Google Scholar] [CrossRef]
- Jiang, L.L.; Maskell, D.L.; Patra, J.C. A novel ant colony optimization-based maximum power point tracking for photovoltaic systems under partially shaded conditions. Energy Build. 2013, 58, 227–236. [Google Scholar] [CrossRef]
- Motahhir, S.; Chouder, A.; El Hammoumi, A.; Benyoucef, A.S.; El Ghzizal, A.; Kichou, S.; Kara, K.; Sanjeevikumar, P.; Silvestre, S. Optimal energy harvesting from a multistrings PV generator based on artificial bee colony algorithm. IEEE Syst. J. 2020, 15, 4137–4144. [Google Scholar] [CrossRef]
- Anand, R.; Swaroop, D.; Kumar, B. Global maximum power point tracking for PV array under partial shading using cuckoo search. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; pp. 10–15. [Google Scholar] [CrossRef]
- Farzaneh, J.; Keypour, R.; Ahmadieh, M. A New Maximum Power Point Tracking Based on Modified Firefly Algorithm for PV System Under Partial Shading Conditions. Technol. Econ. Smart Grids Sustain. Energy 2018, 3, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. MPPT in Dynamic Condition of Partially Shaded PV System by Using WODE Technique. IEEE Trans. Sustain. Energy 2017, 8, 1204–1214. [Google Scholar] [CrossRef]
- Sarwar, S.; Javed, M.Y.; Jaffery, M.H.; Ashraf, M.S.; Naveed, M.T.; Hafeez, M.A. Modular Level Power Electronics (MLPE) Based Distributed PV System for Partial Shaded Conditions. Energies 2022, 15, 4797. [Google Scholar] [CrossRef]
- Kaced, K.; Larbes, C.; Ramzan, N.; Bounabi, M. Bat algorithm based maximum power point tracking for photovoltaic system under partial shading conditions. Sol. Energy 2017, 158, 490–503. [Google Scholar] [CrossRef] [Green Version]
- Chamanpira, M.; Ghahremani, M.; Dadfar, S.; Khaksar, M.; Rezvani, A.; Wakil, K. A novel MPPT technique to increase accuracy in photovoltaic systems under variable atmospheric conditions using Fuzzy Gain scheduling. Energy Sources, Part A Recover. Util. Environ. Eff. 2019, 43, 2960–2982. [Google Scholar] [CrossRef]
- Benavides, D.; Arévalo, P.; Tostado-Véliz, M.; Vera, D.; Escamez, A.; Aguado, J.A.; Jurado, F. An Experimental Study of Power Smoothing Methods to Reduce Renewable Sources Fluctuations Using Supercapacitors and Lithium-Ion Batteries. Batteries 2022, 8, 228. [Google Scholar] [CrossRef]
- Khaled, A.; Aboubakeur, H.; Mohamed, B.; Nabil, A. A Fast MPPT Control Technique Using PID Controller in a Photovoltaic System. In Proceedings of the 2018 International Conference on Applied Smart Systems (ICASS), Medea, Algeria, 24–25 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Khaled, A.; Aboubakeur, H.; Nabil, A.; Abdelhamid, R. Design of a robust PID controller used in PV systems. In Proceedings of the 2020 1st International Conference on Communications, Control Systems and Signal Processing (CCSSP), El Oued, Algeria, 16–17 May 2020; pp. 370–375. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MPPT Algorithm | Tracking Efficiency | Oscillations at Steady-State | Convergence Speed | Implementation Complexity |
|---|---|---|---|---|
| ACO [9,42] | Medium | Low | Medium | Medium |
| ABC [10,43] | High | Low | Medium | High |
| CSA [11,44] | High | Low | High | Medium |
| FFA [45] | High | Medium | High | High |
| WOA [46] | High | Medium | Medium | High |
| DFO [47] | Medium | High | High | High |
| SSA [15] | High | High | Medium | High |
| PSO [16] | High | Low | High | High |
| BA [48] | High | Medium | Very high | High |
| GWO [18] | High | Medium | High | Medium |
| MFO [19] | High | Medium | High | High |
| PSO-P&O [24] | High | Low | High | Medium |
| PSO-HC [30] | Medium | Medium | Medium | Medium |
| PSO-PI [31] | Medium | High | High | Low |
| GWO-P&O [32] | High | Low | High | Medium |
| WOA-P&O [33] | High | Medium | Medium | Medium |
| ANN-P&O [49] | Medium | Low | Medium | Medium |
| ACO-P&O [34] | High | Low | High | High |
| INC-FFA [36] | High | Low | High | Medium |
| Proposed PSO-PID | Very high | Very low | Very high | Medium |
| Parameters | CPSO | BA | Proposed PSO-PID | |||
|---|---|---|---|---|---|---|
| 1 | n | 3 | n | 3 | n | 3 |
| 2 | α | 2 | α | 0.9 | α | 0.9 |
| 3 | β | 1 | ω | 0.4 | β | 0.4 |
| 4 | θ | 0.4 | 0.6 | θ | 0.4 | |
| 5 | Δd | 0.01 | vmax | 4 | ||
| 6 | ΔP | 0.05 | jmax | 12 | ||
| Radiation | PS1 (GP at the Middle) | PS2 (GP at the End) | PS3 (GP at the Beginning) | |
|---|---|---|---|---|
| G1 | 700 | 1000 | 400 | |
| G2 | 1000 | 700 | 1000 | |
| G3 | 400 | 1000 | 1000 | |
| PTh * (W) | 126 | 197.5 | 168.1 | |
| VTh * (V) | 36.63 | 56.85 | 35.18 | |
| PSO-PID | PAct * (W) | 126 | 197.5 | 168.1 |
| VAct * (V) | 36.63 | 56.85 | 35.18 | |
| Tracking Time (s) | 0.0023 (0.0–0.01) | 0.01207 (0.01–0.02) | 0.023 (0.02–0.03) | |
| Efficiency (%) | 100 | 100 | 100 | |
| CPSO | PAct (W) | 123.3 | 196.1 | 166.6 |
| VAct (V) | 36.59 | 57.15 | 34.77 | |
| Tracking Time (s) | 0.008 (0.0–0.01) | 0.0128 (0.01–0.02) | 0.024 (0.02–0.03) | |
| Efficiency (%) | 97.86 | 99.29 | 99.10 | |
| BA | PAct (W) | 125.3 | 196.8 | 162 |
| VAct (V) | 36.41 | 56.84 | 35.72 | |
| Tracking Time (s) | 0.0039 (0.0–0.01) | 0.01246 (0.01–0.02) | 0.02239 (0.02–0.03) | |
| Efficiency (%) | 99.44 | 99.64 | 96.73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Muthanna, G.; Fang, S.; AL-Wesabi, I.; Ameur, K.; Kotb, H.; AboRas, K.M.; Garni, H.Z.A.; Mas’ud, A.A. A High Speed MPPT Control Utilizing a Hybrid PSO-PID Controller under Partially Shaded Photovoltaic Battery Chargers. Sustainability 2023, 15, 3578. https://doi.org/10.3390/su15043578
Al-Muthanna G, Fang S, AL-Wesabi I, Ameur K, Kotb H, AboRas KM, Garni HZA, Mas’ud AA. A High Speed MPPT Control Utilizing a Hybrid PSO-PID Controller under Partially Shaded Photovoltaic Battery Chargers. Sustainability. 2023; 15(4):3578. https://doi.org/10.3390/su15043578
Chicago/Turabian StyleAl-Muthanna, Galal, Shuhua Fang, Ibrahim AL-Wesabi, Khaled Ameur, Hossam Kotb, Kareem M. AboRas, Hassan Z. Al Garni, and Abdullahi Abubakar Mas’ud. 2023. "A High Speed MPPT Control Utilizing a Hybrid PSO-PID Controller under Partially Shaded Photovoltaic Battery Chargers" Sustainability 15, no. 4: 3578. https://doi.org/10.3390/su15043578