
Application of Sustainable Blockchain Technology in the Internet of Vehicles: Innovation in Traffic Sign Detection Systems



Abstract
:1. Introduction
- To achieve the effective integration of blockchain and object detection models, we propose an innovative architecture designed to optimize data storage and transmission processes, ensuring sustainable resource utilization throughout the system’s long-term operation. This contributes to reducing the overall energy consumption of the system, aligning it more closely with the principles of environmentally sustainable development;
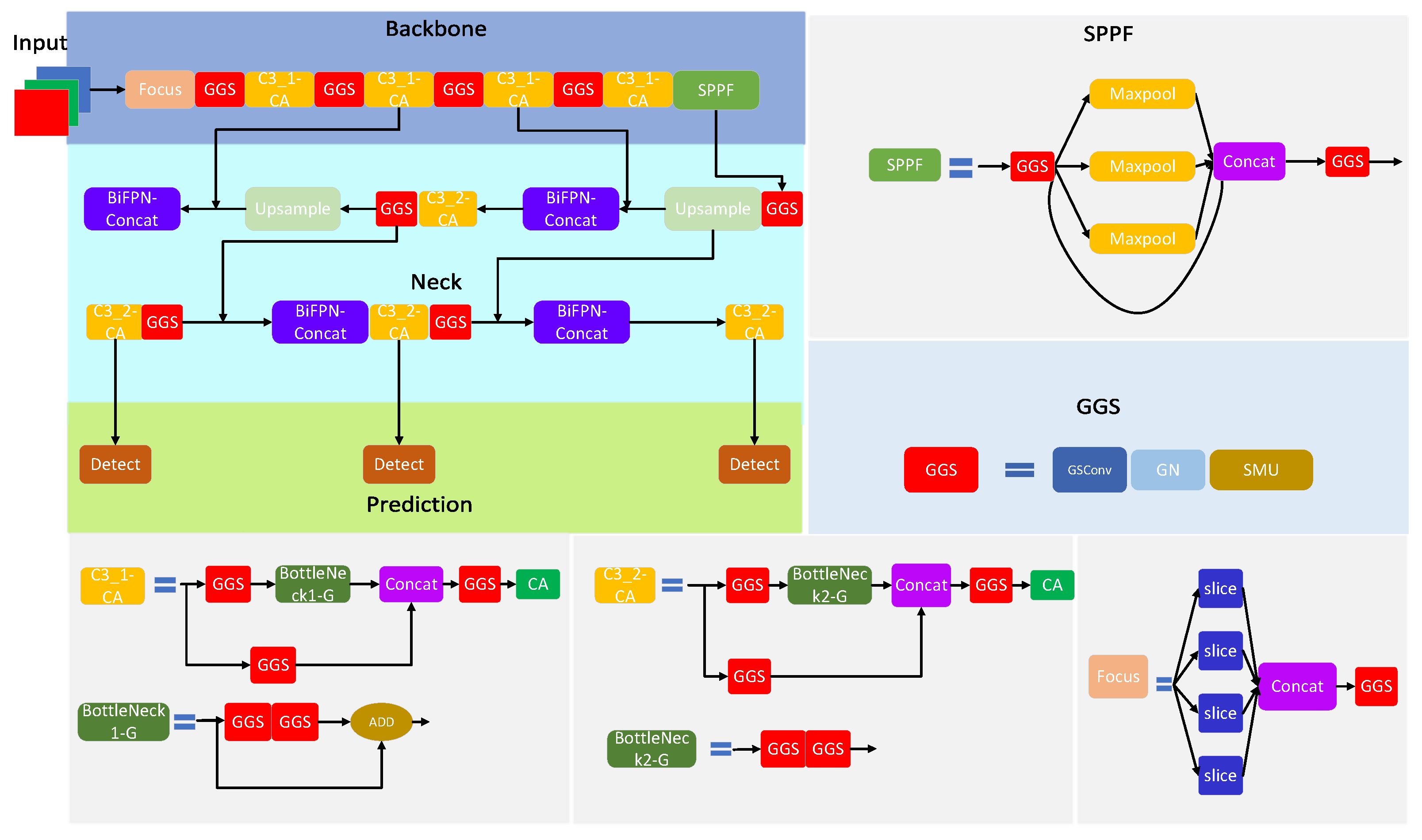
- The YOLOv5 model is enhanced with the incorporation of a coordinate attention mechanism to improve its feature extraction capabilities. Additionally, the integration of BiFPN further bolsters the model’s effectiveness in fusing multi-scale features;
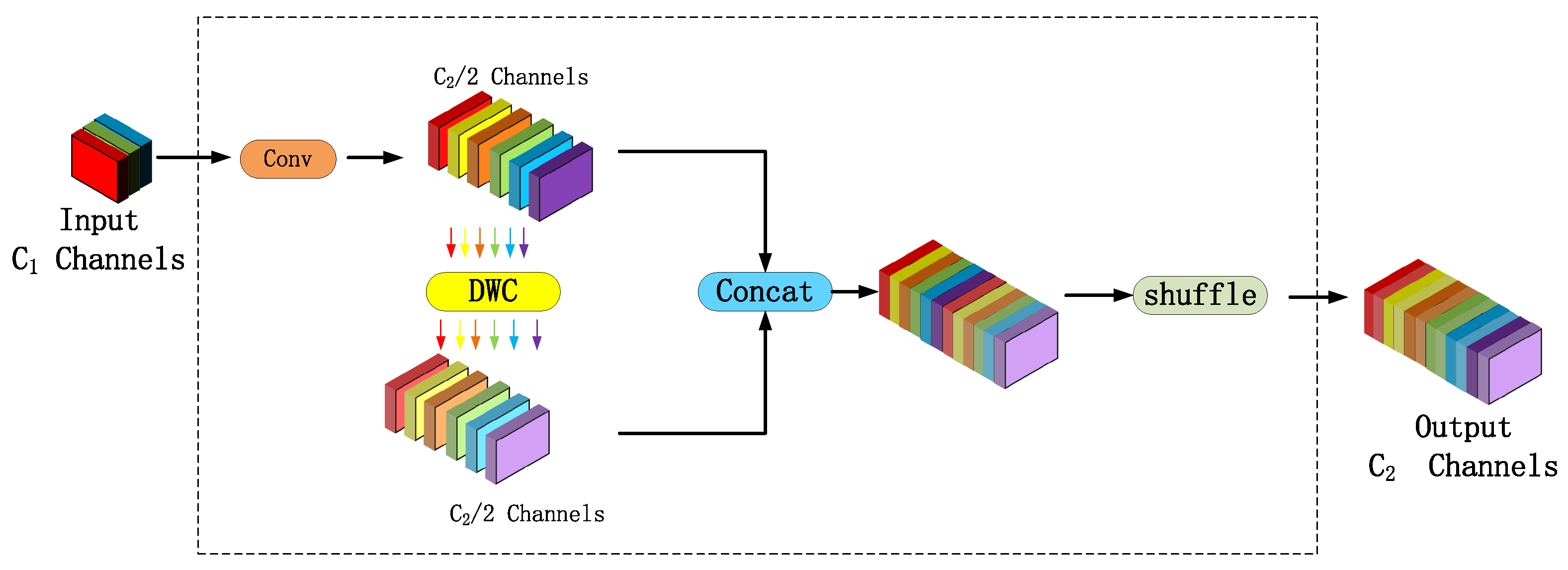
- We introduce the GGS module in conjunction with GSconv to replace the original CBS module, resulting in a more lightweight model.
2. Related Work
2.1. Overview of Traffic Sign Detection Methods
2.2. Blockchain Technology Application Research in the IoV
3. Method
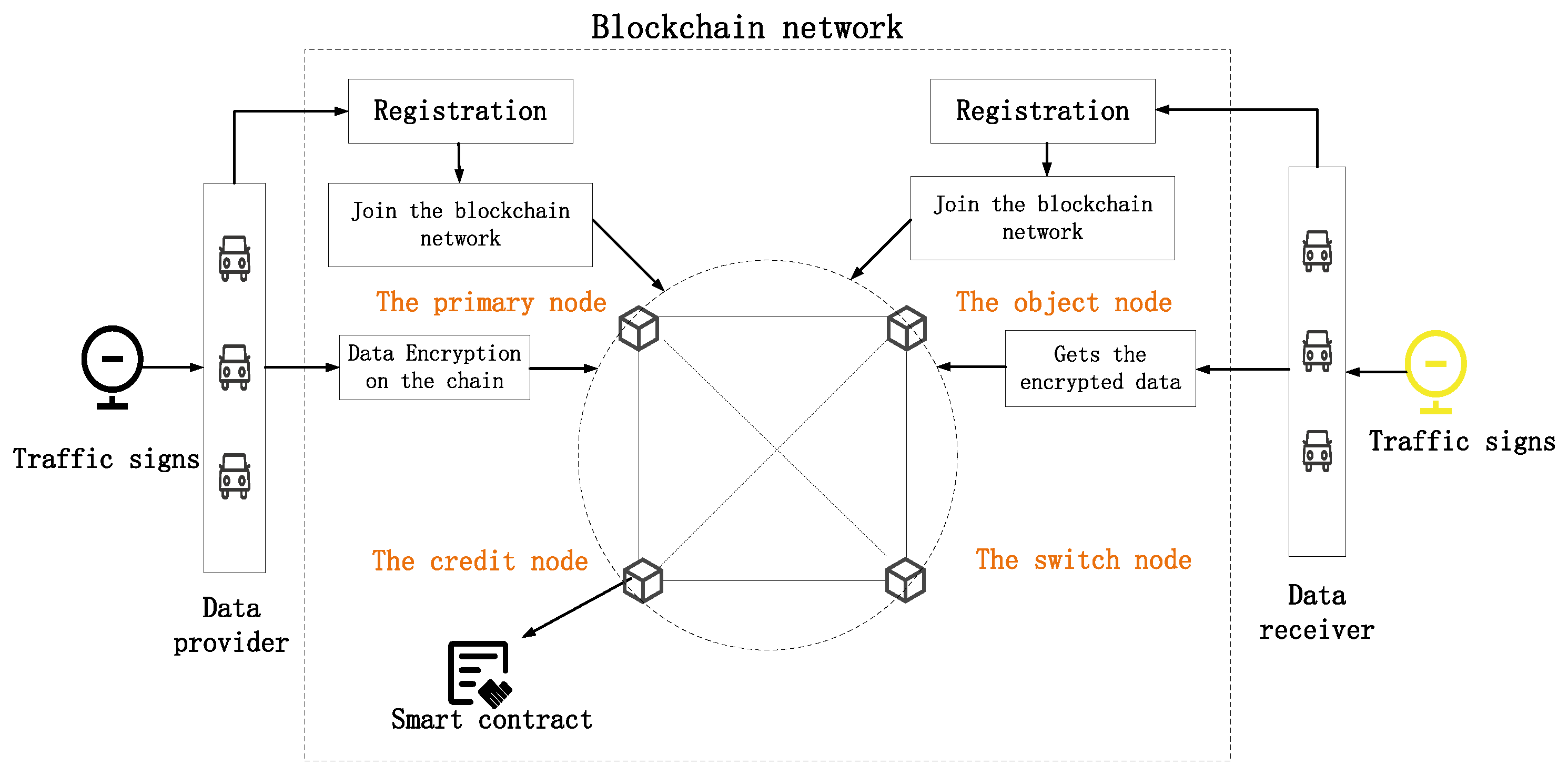
3.1. System Architecture
- (1)
- The term data providers mainly refers to vehicles with data collection functions. Vehicles identify the corresponding traffic sign data using YOLOv5 and then encrypt the collected data and upload them to the blockchain network;
- (2)
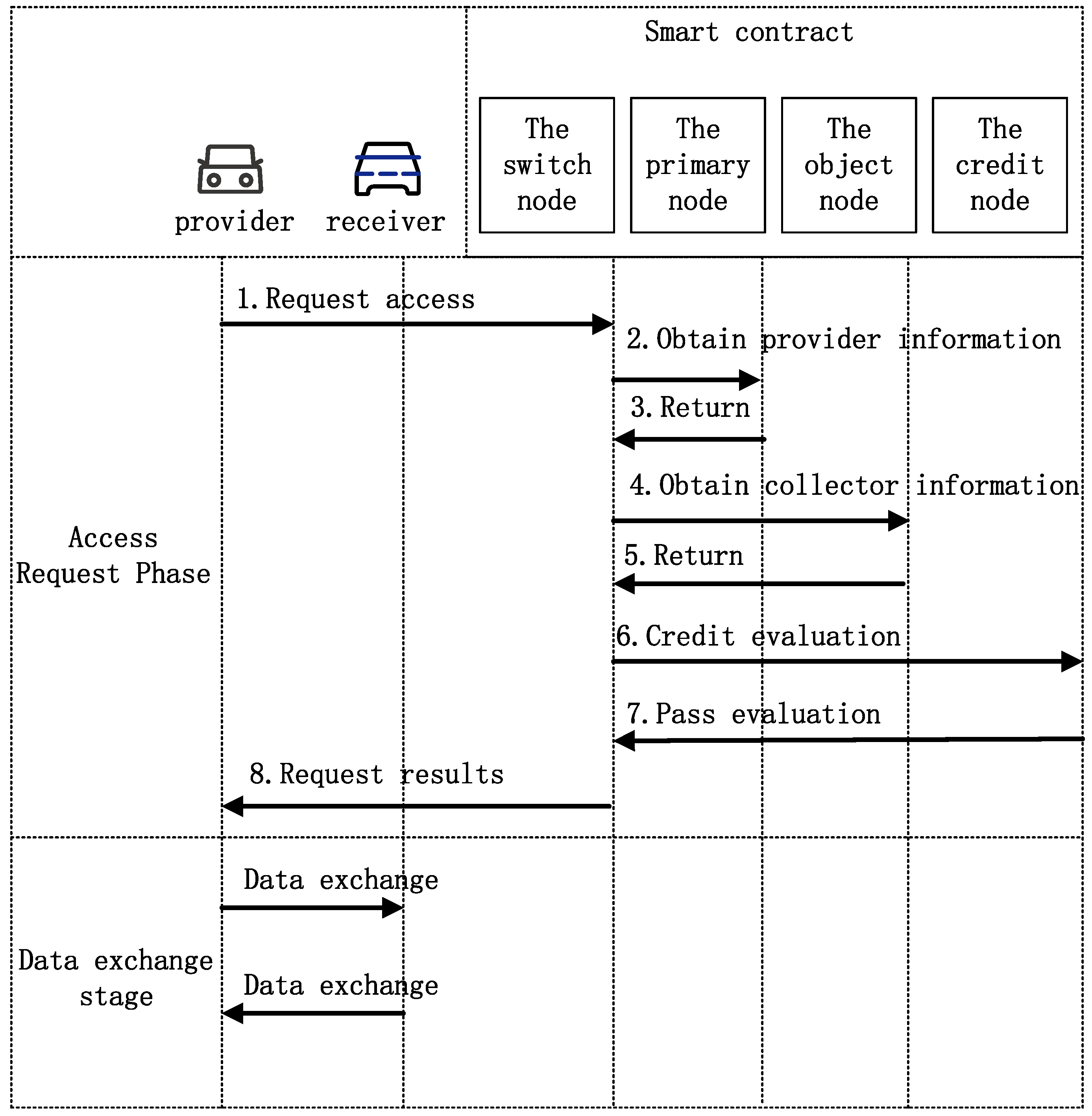
- Blockchain network refers to a public blockchain platform where data providers or data receivers can conduct data transactions after registering their information. The main part of the blockchain network, the smart contract, consists of four parts: the subject node, the object node, the credit node, and the exchange node. The role of the subject and object nodes is to store the identity information of the provider and receiver and to verify the correctness of the signatures of both parties in the data exchange. The role of the credit node is to evaluate the credit of both parties in the transaction and determine whether the two parties can conduct data exchange. The exchange node is responsible for access requests of the entire control system;
- (3)
- The data receiver is the user of the data, responsible for decrypting the received encrypted data and utilizing the provider’s data to perform real-time processing on traffic signal signs.
3.2. Blockchain Network Construction
3.2.1. Node Data Collection
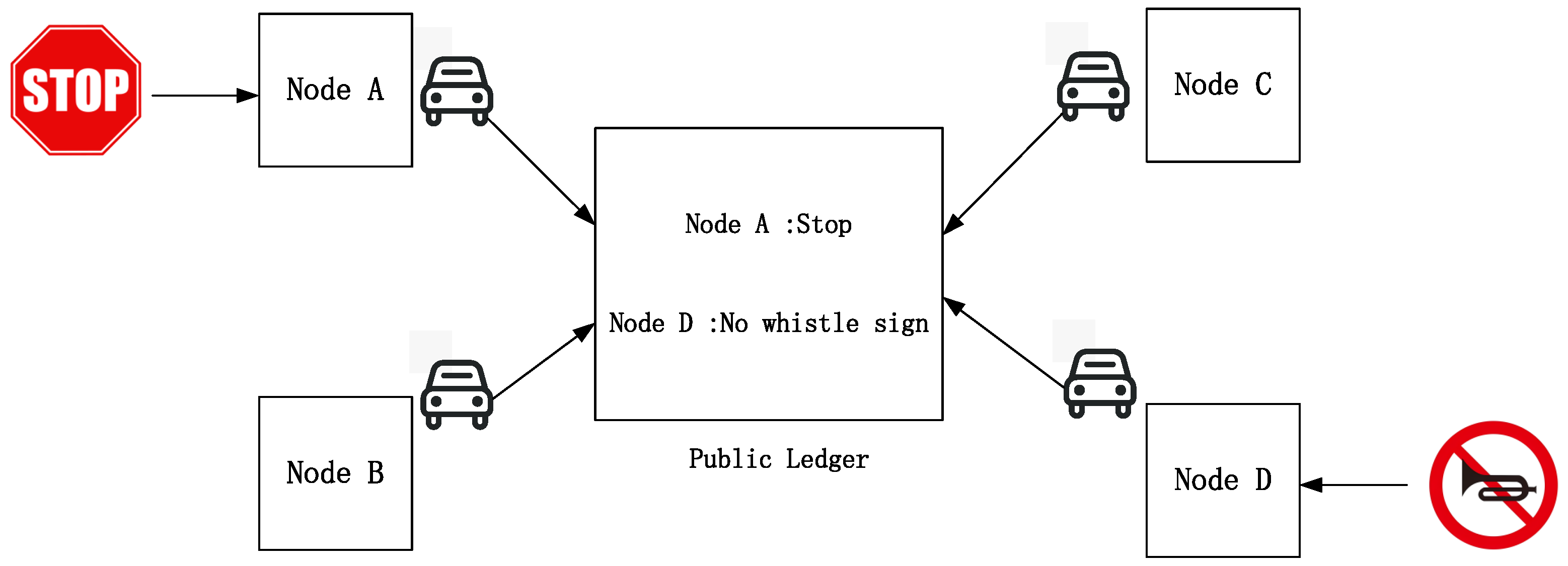
3.2.2. Data Sharing
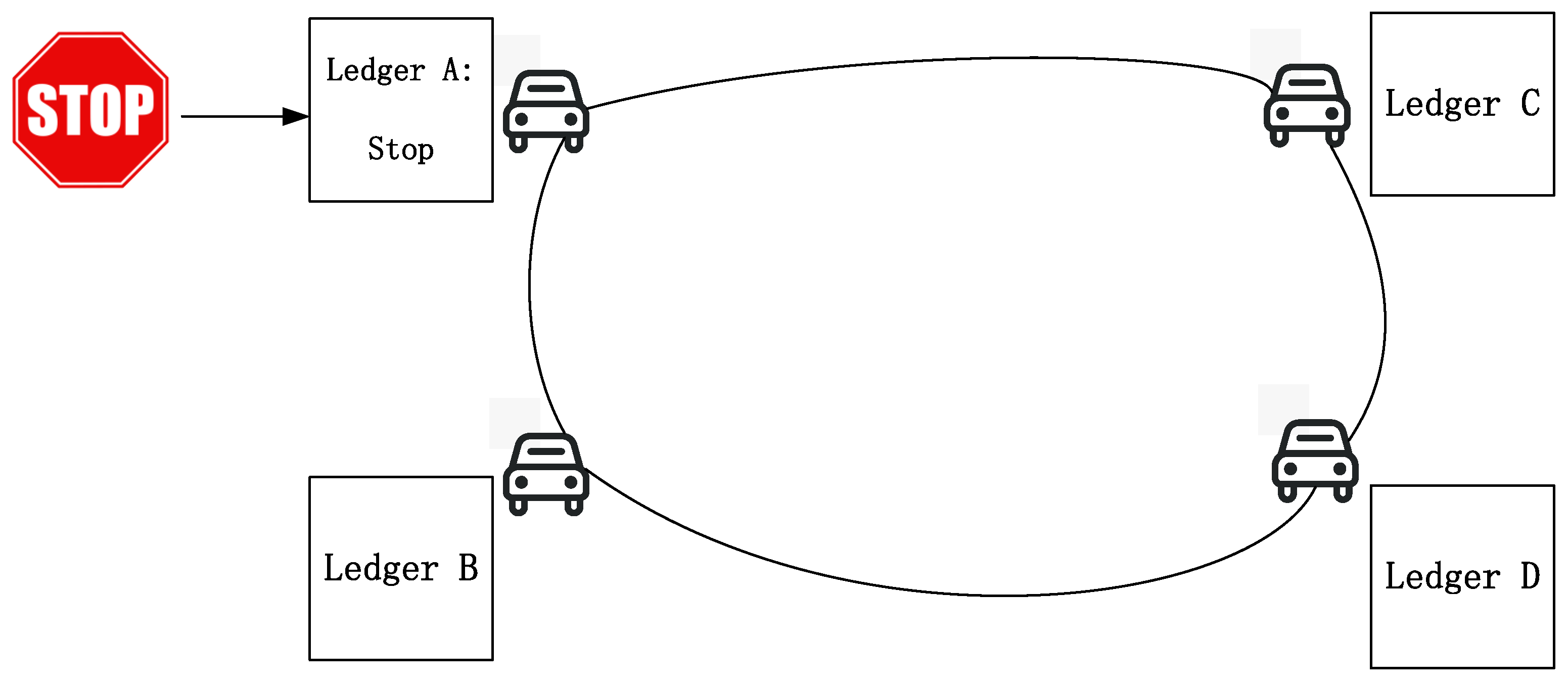
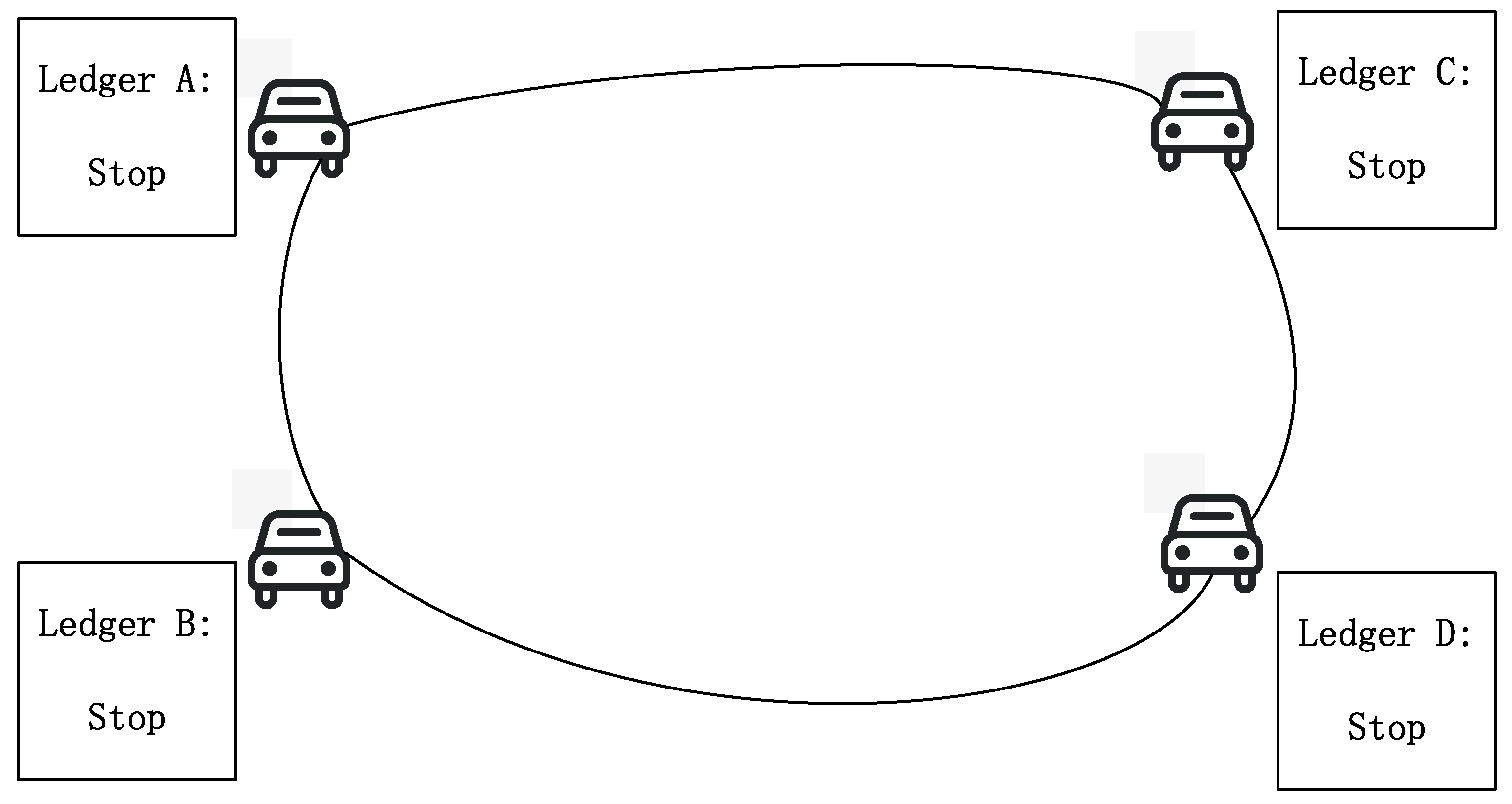
3.2.3. Distributed Storage: Robustness and Security in Connected Vehicles
3.3. Traffic Sign Detection Model
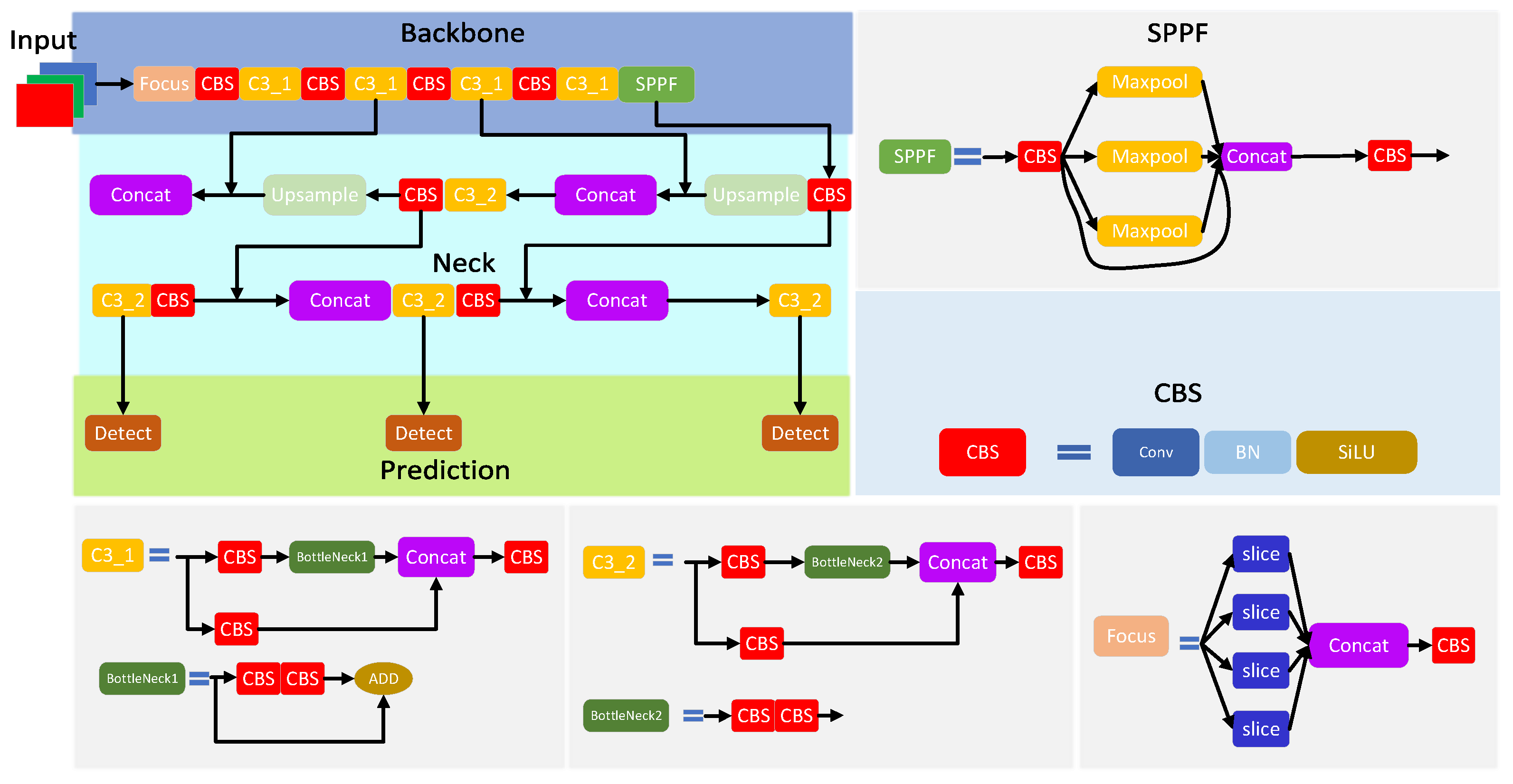
3.3.1. YOLOv5 Model
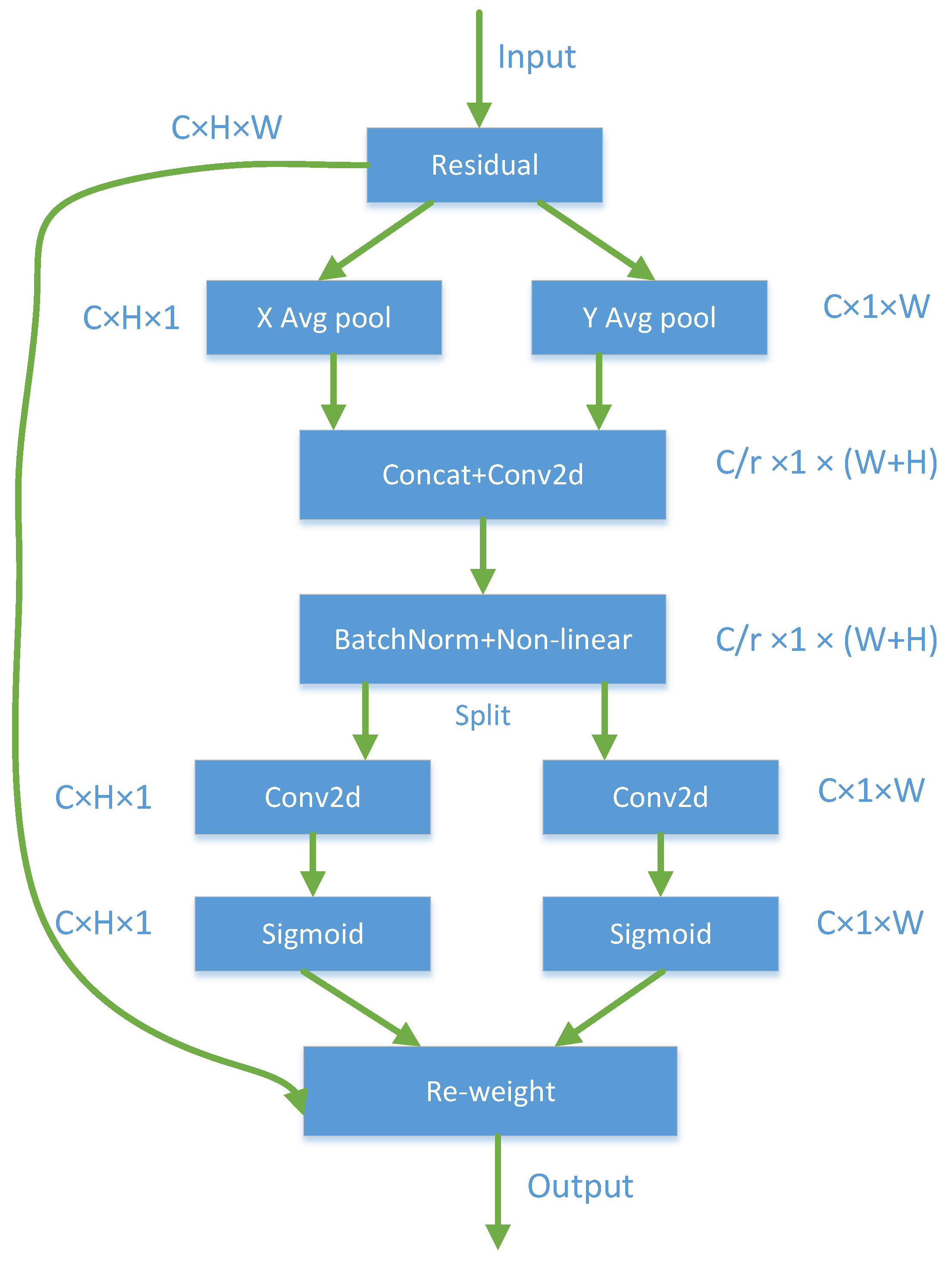
3.3.2. Coordinate Attention Mechanism
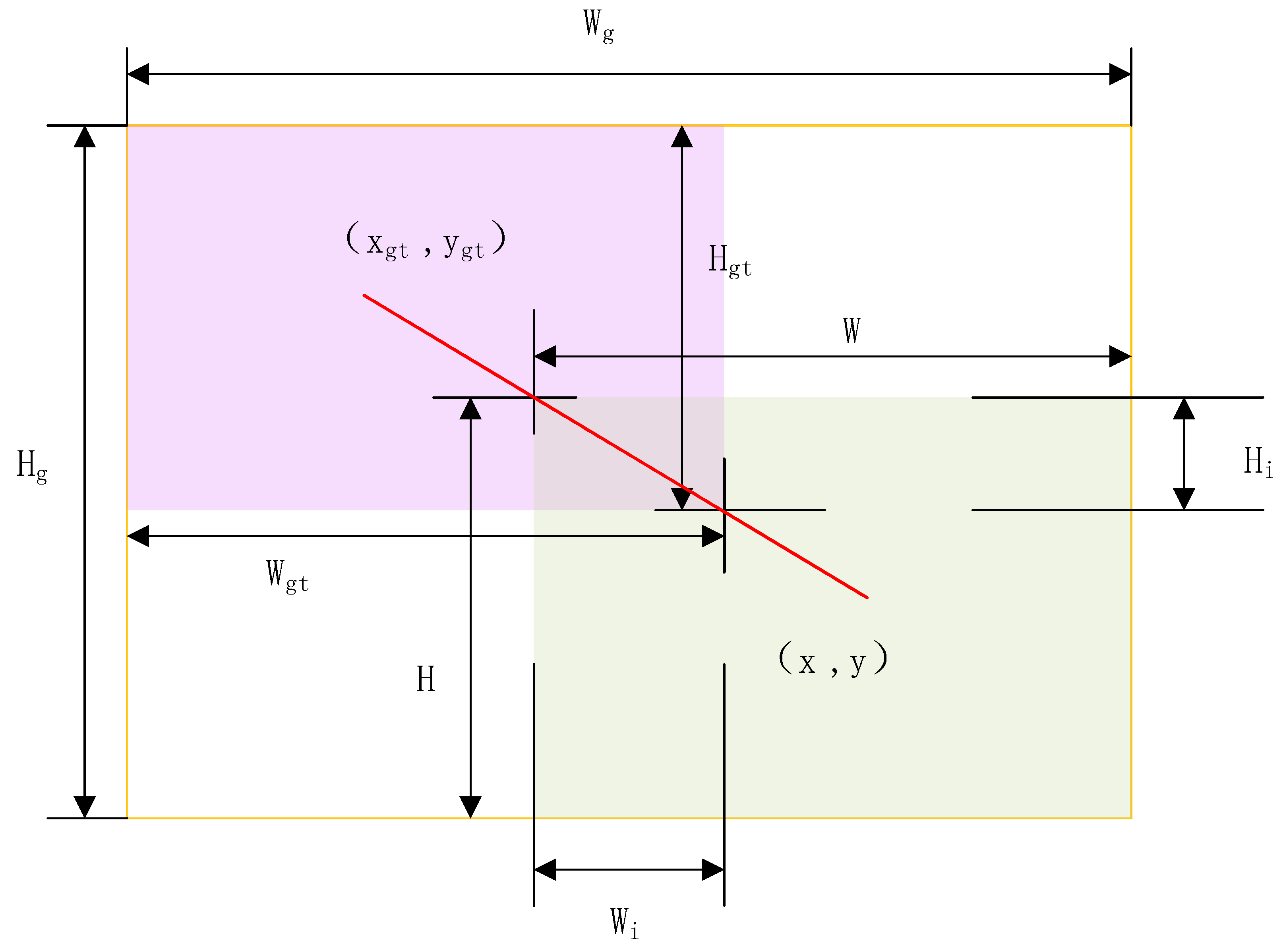
3.3.3. Loss Function Improvement
3.3.4. BiFPN Feature Fusion Network
3.3.5. GGS Module
3.3.6. GGS-YOLO Detection Model
4. Experimentation and Evaluation
4.1. Dataset
4.2. Laboratory Environment
4.3. Evaluation
4.4. Experimental Results
4.5. Comparative Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ali, M.S.; Vecchio, M.; Pincheira, M.; Dolui, K.; Antonelli, F.; Rehmani, M.H. Applications of blockchains in the Internet of Things: A comprehensive survey. IEEE Commun. Surv. Tutor. 2018, 21, 1676–1717. [Google Scholar] [CrossRef]
- De Vries, A.; Stoll, C. Bitcoin’s growing e-waste problem. Resour. Conserv. Recycl. 2021, 175, 105901. [Google Scholar] [CrossRef]
- Liu, Y.; Fang, Z.; Cheung, M.H.; Cai, W.; Huang, J. An incentive mechanism for sustainable blockchain storage. IEEE/ACM Trans. Netw. 2022, 30, 2131–2144. [Google Scholar] [CrossRef]
- Liu, C.; Li, S.; Chang, F.; Wang, Y. Machine vision based traffic sign detection methods: Review, analyses and perspectives. IEEE Access 2019, 7, 86578–86596. [Google Scholar] [CrossRef]
- Yang, Y.; Wu, F. Real-time traffic sign detection via color probability model and integral channel features. In Proceedings of the Pattern Recognition: 6th Chinese Conference, CCPR 2014, Changsha, China, 17–19 November 2014; Proceedings, Part II 6. Springer: Berlin/Heidelberg, Germany, 2014; pp. 545–554. [Google Scholar]
- Zaklouta, F.; Stanciulescu, B. Real-time traffic sign recognition in three stages. Robot. Auton. Syst. 2014, 62, 16–24. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Zhang, J.; Xie, Z.; Sun, J.; Zou, X.; Wang, J. A cascaded R-CNN with multiscale attention and imbalanced samples for traffic sign detection. IEEE Access 2020, 8, 29742–29754. [Google Scholar] [CrossRef]
- Wang, F.; Li, Y.; Wei, Y.; Dong, H. Improved faster rcnn for traffic sign detection. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, Hawaii, 21–26 July 2016; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings, Part I 14. Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Wang, J.; Chen, Y.; Dong, Z.; Gao, M. Improved YOLOv5 network for real-time multi-scale traffic sign detection. Neural Comput. Appl. 2023, 35, 7853–7865. [Google Scholar] [CrossRef]
- Chen, J.; Jia, K.; Chen, W.; Lv, Z.; Zhang, R. A real-time and high-precision method for small traffic-signs recognition. Neural Comput. Appl. 2022, 15, 1–13. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, M.; Jin, X.; Li, X. A real-time Chinese traffic sign detection algorithm based on modified YOLOv2. Algorithms 2017, 10, 127. [Google Scholar] [CrossRef]
- Lin, S.; Zhang, Z.; Tao, J.; Zhang, F.; Fan, X.; Lu, Q. Traffic Sign Detection Based on Lightweight Multiscale Feature Fusion Network. Sustainability 2022, 14, 14019. [Google Scholar] [CrossRef]
- Changzhen, X.; Cong, W.; Weixin, M.; Yanmei, S. A traffic sign detection algorithm based on deep convolutional neural network. In Proceedings of the 2016 IEEE International Conference on Signal and Image Processing (ICSIP), Beijing, China, 13–15 August 2016; pp. 676–679. [Google Scholar]
- Khan, J.A.; Yeo, D.; Shin, H. New dark area sensitive tone mapping for deep learning based traffic sign recognition. Sensors 2018, 18, 3776. [Google Scholar] [CrossRef] [PubMed]
- Jaramillo-Alcazar, A.; Govea, J.; Villegas-Ch, W. Advances in the Optimization of Vehicular Traffic in Smart Cities: Integration of Blockchain and Computer Vision for Sustainable Mobility. Sustainability 2023, 15, 15736. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Zhang, Y. A blockchain-based framework for data sharing with fine-grained access control in decentralized storage systems. IEEE Access 2018, 6, 38437–38450. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, S.; Zhang, P.; He, L.; Li, X.; Zhou, S. Protecting data privacy for permissioned blockchains using identity-based encryption. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 602–605. [Google Scholar]
- Xu, C.; Wu, H.; Liu, H.; Gu, W.; Li, Y.; Cao, D. Blockchain-oriented privacy protection of sensitive data in the internet of vehicles. IEEE Trans. Intell. Veh. 2022, 8, 1057–1067. [Google Scholar] [CrossRef]
- Liang, W.; Tang, M.; Long, J.; Peng, X.; Xu, J.; Li, K.C. A secure fabric blockchain-based data transmission technique for industrial Internet-of-Things. IEEE Trans. Ind. Inform. 2019, 15, 3582–3592. [Google Scholar] [CrossRef]
- Si, H.; Sun, C.; Li, Y.; Qiao, H.; Shi, L. IoT information sharing security mechanism based on blockchain technology. Future Gener. Comput. Syst. 2019, 101, 1028–1040. [Google Scholar] [CrossRef]
- Cai, C.; Yuan, X.; Wang, C. Towards trustworthy and private keyword search in encrypted decentralized storage. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar]
- Gao, D.; Wang, S.; Liu, Y.; Jiang, W.; Li, Z.; He, T. Spoofing-jamming attack based on cross-technology communication for wireless networks. Comput. Commun. 2021, 177, 86–95. [Google Scholar] [CrossRef]
- Shen, M.; Tang, X.; Zhu, L.; Du, X.; Guizani, M. Privacy-preserving support vector machine training over blockchain-based encrypted IoT data in smart cities. IEEE Internet Things J. 2019, 6, 7702–7712. [Google Scholar] [CrossRef]
- Magsi, A.H.; Yovita, L.V.; Ghulam, A.; Muhammad, G.; Ali, Z. A Content Poisoning Attack Detection and Prevention System in Vehicular Named Data Networking. Sustainability 2023, 15, 10931. [Google Scholar] [CrossRef]
- Gao, F.; Zhu, L.; Gai, K.; Zhang, C.; Liu, S. Achieving a covert channel over an open blockchain network. IEEE Netw. 2020, 34, 6–13. [Google Scholar] [CrossRef]
- Gao, D.; Liu, Y.; Hu, B.; Wang, L.; Chen, W.; Chen, Y.; He, T. Time Synchronization based on Cross-Technology Communication for IoT Networks. IEEE Internet Things J. 2023, 10, 19753–19764. [Google Scholar] [CrossRef]
- Gao, D.; Guan, Z.; Zhang, S.; Hu, B. Maximum network throughput based on cross-technology communication for sensor networks. China Commun. 2021, 18, 30–44. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, X.; Liu, X.; Jiang, J.; Qi, L.; Bhuiyan, M.Z.A. Adaptive computation offloading with edge for 5G-envisioned internet of connected vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5213–5222. [Google Scholar] [CrossRef]
- Ren, Q.; Man, K.L.; Li, M.; Gao, B.; Ma, J. Intelligent design and implementation of blockchain and Internet of things–based traffic system. Int. J. Distrib. Sens. Netw. 2019, 15, 1550147719870653. [Google Scholar] [CrossRef]
- Prashar, D.; Jha, N.; Jha, S.; Joshi, G.P.; Seo, C. Integrating IOT and blockchain for ensuring road safety: An unconventional approach. Sensors 2020, 20, 3296. [Google Scholar] [CrossRef] [PubMed]
- Ghimire, B.; Rawat, D.B. Secure, privacy preserving, and verifiable federating learning using blockchain for internet of vehicles. IEEE Consum. Electron. Mag. 2021, 11, 67–74. [Google Scholar] [CrossRef]
- Chen, C.; Wu, J.; Lin, H.; Chen, W.; Zheng, Z. A secure and efficient blockchain-based data trading approach for internet of vehicles. IEEE Trans. Veh. Technol. 2019, 68, 9110–9121. [Google Scholar] [CrossRef]
- Joshi, G.P.; Perumal, E.; Shankar, K.; Tariq, U.; Ahmad, T.; Ibrahim, A. Toward blockchain-enabled privacy-preserving data transmission in cluster-based vehicular networks. Electronics 2020, 9, 1358. [Google Scholar] [CrossRef]
- Kang, J.; Yu, R.; Huang, X.; Wu, M.; Maharjan, S.; Xie, S.; Zhang, Y. Blockchain for secure and efficient data sharing in vehicular edge computing and networks. IEEE Internet Things J. 2018, 6, 4660–4670. [Google Scholar] [CrossRef]
- Alfadhli, S.A.; Lu, S.; Chen, K.; Sebai, M. Mfspv: A multi-factor secured and lightweight privacy-preserving authentication scheme for vanets. IEEE Access 2020, 8, 142858–142874. [Google Scholar] [CrossRef]
- Chai, H.; Leng, S.; Chen, Y.; Zhang, K. A hierarchical blockchain-enabled federated learning algorithm for knowledge sharing in internet of vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3975–3986. [Google Scholar] [CrossRef]
- Gao, D.; Wang, H.; Guo, X.; Wang, L.; Gui, G.; Wang, W.; Yin, Z.; Wang, S.; Liu, Y.; He, T. Federated Learning Based on CTC for Heterogeneous Internet of Things. IEEE Internet Things J. 2023, 10, 22673–22685. [Google Scholar] [CrossRef]
- Xiao, H.; Zhang, W.; Li, W.; Chronopoulos, A.T.; Zhang, Z. Joint clustering and blockchain for real-time information security transmission at the crossroads in C-V2X networks. IEEE Internet Things J. 2021, 8, 13926–13938. [Google Scholar] [CrossRef]
- Cui, J.; Ouyang, F.; Ying, Z.; Wei, L.; Zhong, H. Secure and efficient data sharing among vehicles based on consortium blockchain. IEEE Trans. Intell. Transp. Syst. 2021, 23, 8857–8867. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, X.; Zhang, K.; Maharjan, S.; Zhang, Y. Blockchain empowered asynchronous federated learning for secure data sharing in internet of vehicles. IEEE Trans. Veh. Technol. 2020, 69, 4298–4311. [Google Scholar] [CrossRef]
- Tan, C.; Li, X.; Luan, T.H.; Gu, B.; Qu, Y.; Gao, L. Digital twin based remote resource sharing in internet of vehicles using consortium blockchain. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Virtual, 27 September–28 October 2021; pp. 1–6. [Google Scholar]
- Abdellatif, T.; Brousmiche, K.L. Formal verification of smart contracts based on users and blockchain behaviors models. In Proceedings of the 2018 9th IFIP International Conference on New Technologies, Mobility and Security (NTMS), Paris, France, 26–28 February 2018; pp. 1–5. [Google Scholar]
- Krichen, M.; Lahami, M.; Al-Haija, Q.A. Formal methods for the verification of smart contracts: A review. In Proceedings of the 2022 15th International Conference on Security of Information and Networks (SIN), Sousse, Tunisia, 11–13 November 2022. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8759–8768. [Google Scholar]
- Qi, J.; Liu, X.; Liu, K.; Xu, F.; Guo, H.; Tian, X.; Li, M.; Bao, Z.; Li, Y. An improved YOLOv5 model based on visual attention mechanism: Application to recognition of tomato virus disease. Comput. Electron. Agric. 2022, 194, 106780. [Google Scholar] [CrossRef]
- Nacir, O.; Amna, M.; Imen, W.; Hamdi, B. YOLO V5 for traffic sign recognition and detection using transfer learning. In Proceedings of the 2022 IEEE International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Tunis, Tunisia, 26–28 October 2022; Volume 4, pp. 1–4. [Google Scholar]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate attention for efficient mobile network design. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 13713–13722. [Google Scholar]
- Tong, Z.; Chen, Y.; Xu, Z.; Yu, R. Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism. arXiv 2023, arXiv:2301.10051. [Google Scholar]
- Li, Y.; Fan, Q.; Huang, H.; Han, Z.; Gu, Q. A Modified YOLOv8 Detection Network for UAV Aerial Image Recognition. Drones 2023, 7, 304. [Google Scholar] [CrossRef]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. Efficientdet: Scalable and efficient object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10781–10790. [Google Scholar]
- Li, H.; Li, J.; Wei, H.; Liu, Z.; Zhan, Z.; Ren, Q. Slim-neck by GSConv: A better design paradigm of detector architectures for autonomous vehicles. arXiv 2022, arXiv:2206.02424. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. Proc. Int. Conf. Mach. Learn. PMLR 2015, 37, 448–456. [Google Scholar]
- Biswas, K.; Kumar, S.; Banerjee, S.; Pandey, A.K. SMU: Smooth activation function for deep networks using smoothing maximum technique. arXiv 2021, arXiv:2111.04682. [Google Scholar]
- Zhang, J.; Zou, X.; Kuang, L.D.; Wang, J.; Sherratt, R.S.; Yu, X. CCTSDB 2021: A more comprehensive traffic sign detection benchmark. Hum. Centric Comput. Inf. Sci. 2022, 12, 23. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (,) | P/% | R/% | mAP@ 0.5/% | Params/ |
|---|---|---|---|---|
| (1.0, 7) | 89.2 | 79.9 | 86.5 | 5.67 |
| (1.2, 6) | 89.8 | 81.3 | 86.9 | 5.67 |
| (1.4, 5) | 88.5 | 81.7 | 86.5 | 5.67 |
| (1.6, 4) | 87.8 | 81.5 | 86.4 | 5.67 |
| (2.5, 2) | 88.2 | 79.6 | 86.3 | 5.67 |
| Method | CA | Wise-IoU v3 | BiFPN | GGS | P/% | R/% | mAP@ 0.5/% | Params/ |
|---|---|---|---|---|---|---|---|---|
| YOLOv5s | 75.5 | 72.5 | 81.8 | 7.1 | ||||
| A | ✓ | 84.2 | 73.6 | 82.7 | 7.04 | |||
| B | ✓ | 79.1 | 76.2 | 82.3 | 7.1 | |||
| C | ✓ | 80.8 | 77.6 | 82.4 | 7.1 | |||
| D | ✓ | 74.6 | 78.7 | 82.7 | 6.62 | |||
| E | ✓ | ✓ | 77.7 | 80.5 | 85.6 | 6.7 | ||
| F | ✓ | ✓ | ✓ | 85.2 | 81.7 | 84.9 | 6.72 | |
| H | ✓ | ✓ | ✓ | ✓ | 85.6 | 82.3 | 86.7 | 6.76 |
| Method | P/% | R/% | mAP@ 0.5/% | Params/ |
|---|---|---|---|---|
| Faster R-CNN | 59.8 | 76.7 | 73.4 | 144.5 |
| YOLOv3 | 61.6 | 72.8 | 63.2 | 61.5 |
| YOLOv4 | 74.9 | 73.2 | 82.6 | 96.9 |
| YOLOv5s | 75.5 | 72.5 | 81.8 | 7.1 |
| YOLOv7-tiny | 87.5 | 81.2 | 82.4 | 6.2 |
| YOLOv8n | 78.9 | 70.3 | 76.9 | 3 |
| YOLOv8s | 85.4 | 76.4 | 85.4 | 11.2 |
| Ours | 85.6 | 82.3 | 86.7 | 6.76 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Qian, Q.; Zhang, H.; Li, J.; Zhong, Y.; Xiong, N.N. Application of Sustainable Blockchain Technology in the Internet of Vehicles: Innovation in Traffic Sign Detection Systems. Sustainability 2024, 16, 171. https://doi.org/10.3390/su16010171
Liu Y, Qian Q, Zhang H, Li J, Zhong Y, Xiong NN. Application of Sustainable Blockchain Technology in the Internet of Vehicles: Innovation in Traffic Sign Detection Systems. Sustainability. 2024; 16(1):171. https://doi.org/10.3390/su16010171
Chicago/Turabian StyleLiu, Yanli, Qiang Qian, Heng Zhang, Jingchao Li, Yikai Zhong, and Neal N. Xiong. 2024. "Application of Sustainable Blockchain Technology in the Internet of Vehicles: Innovation in Traffic Sign Detection Systems" Sustainability 16, no. 1: 171. https://doi.org/10.3390/su16010171
APA StyleLiu, Y., Qian, Q., Zhang, H., Li, J., Zhong, Y., & Xiong, N. N. (2024). Application of Sustainable Blockchain Technology in the Internet of Vehicles: Innovation in Traffic Sign Detection Systems. Sustainability, 16(1), 171. https://doi.org/10.3390/su16010171