
Comprehensive Multidisciplinary Electric Vehicle Modeling: Investigating the Effect of Vehicle Design on Energy Consumption and Efficiency

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Designing and Modeling the Electric Vehicle
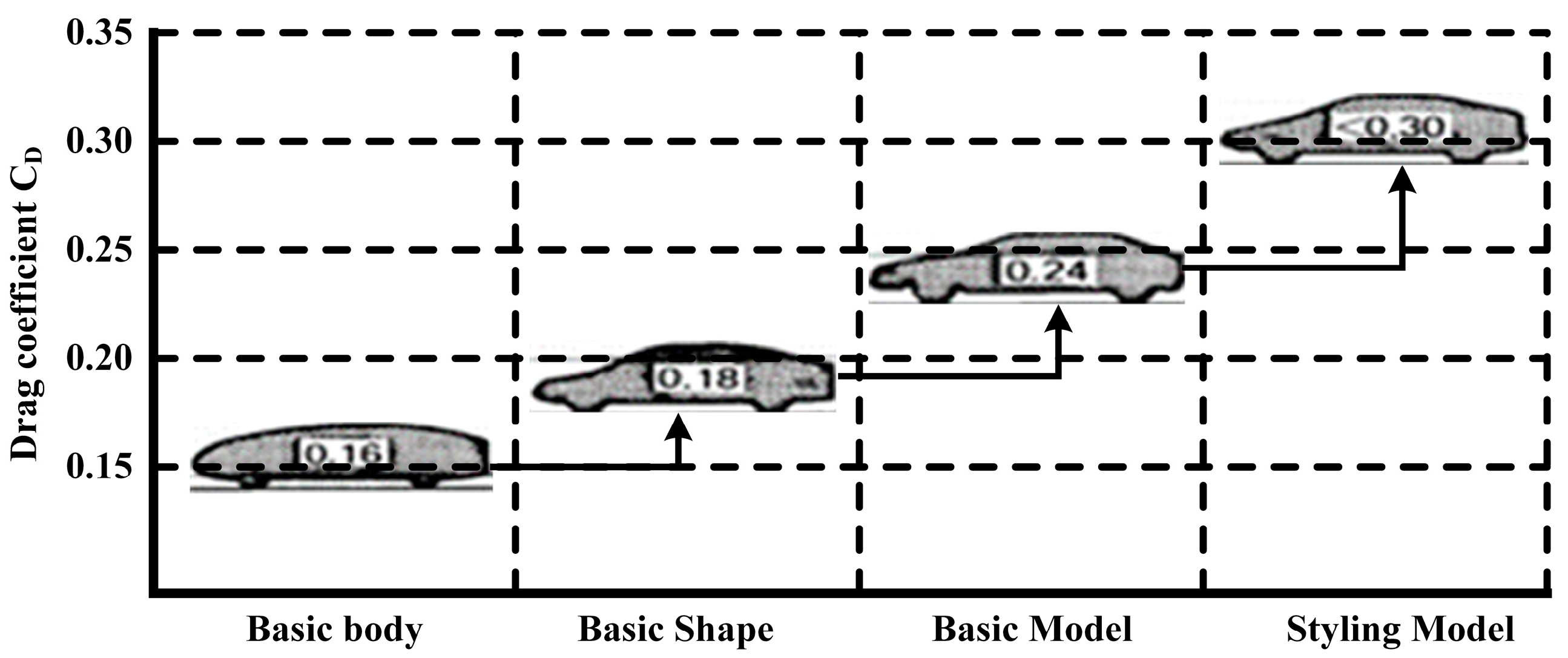
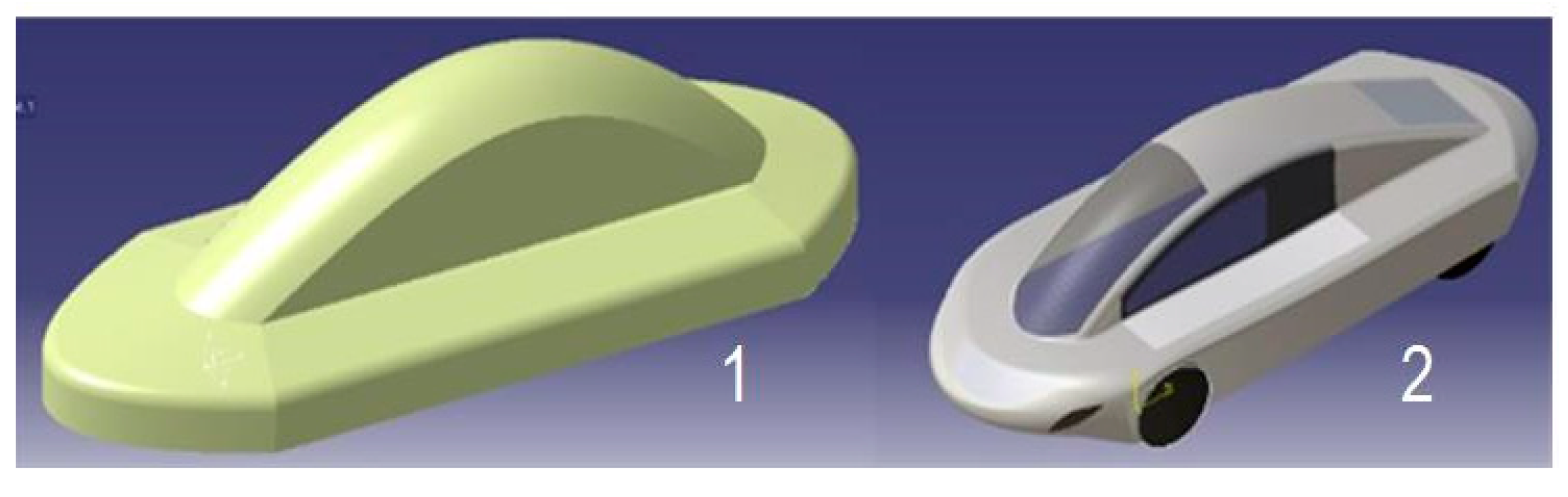
2.1. Vehicle Aerodynamics and Analysis
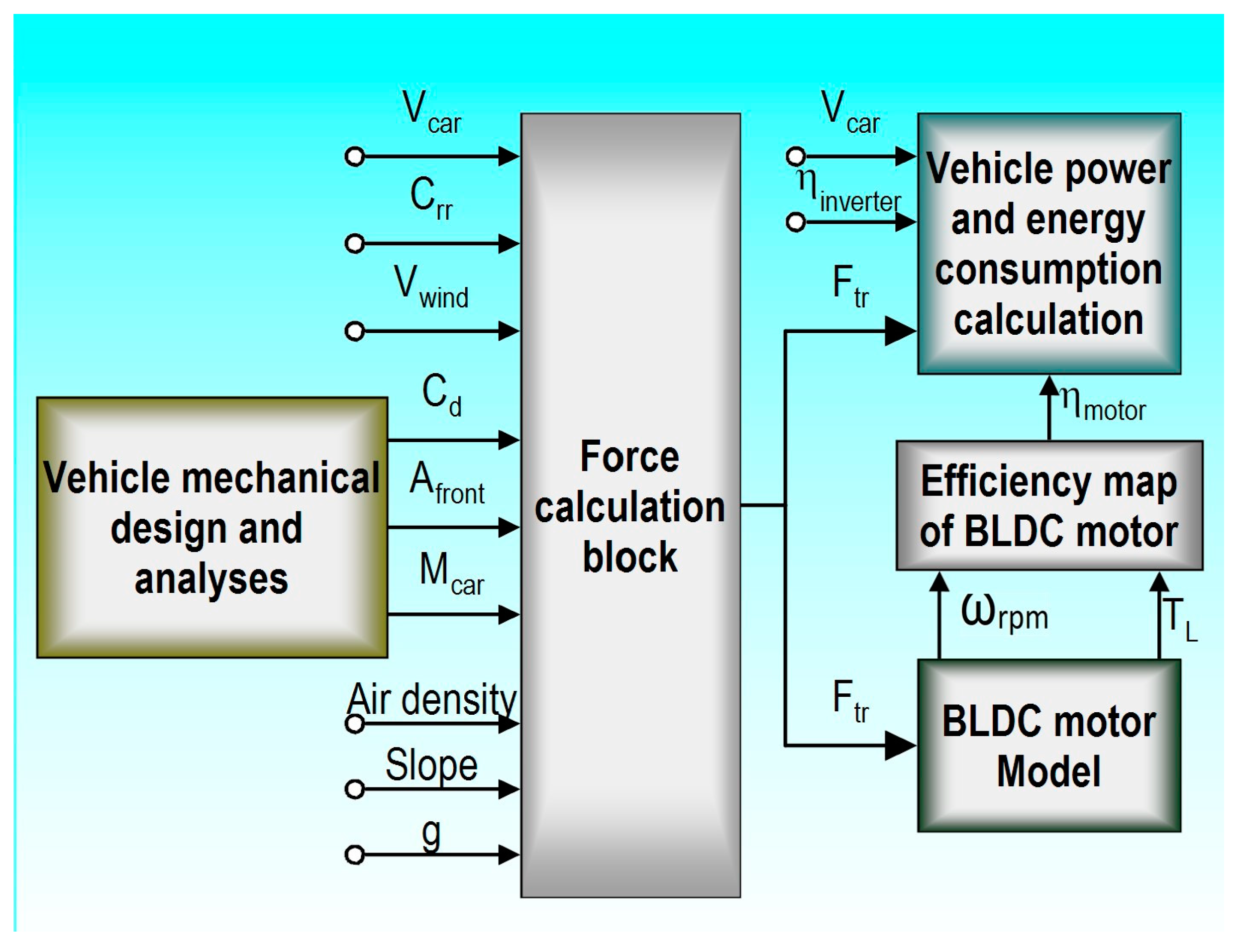
2.2. Vehicle Dynamic Modeling
2.2.1. PMSM Model
2.2.2. PMSM Efficiency Map
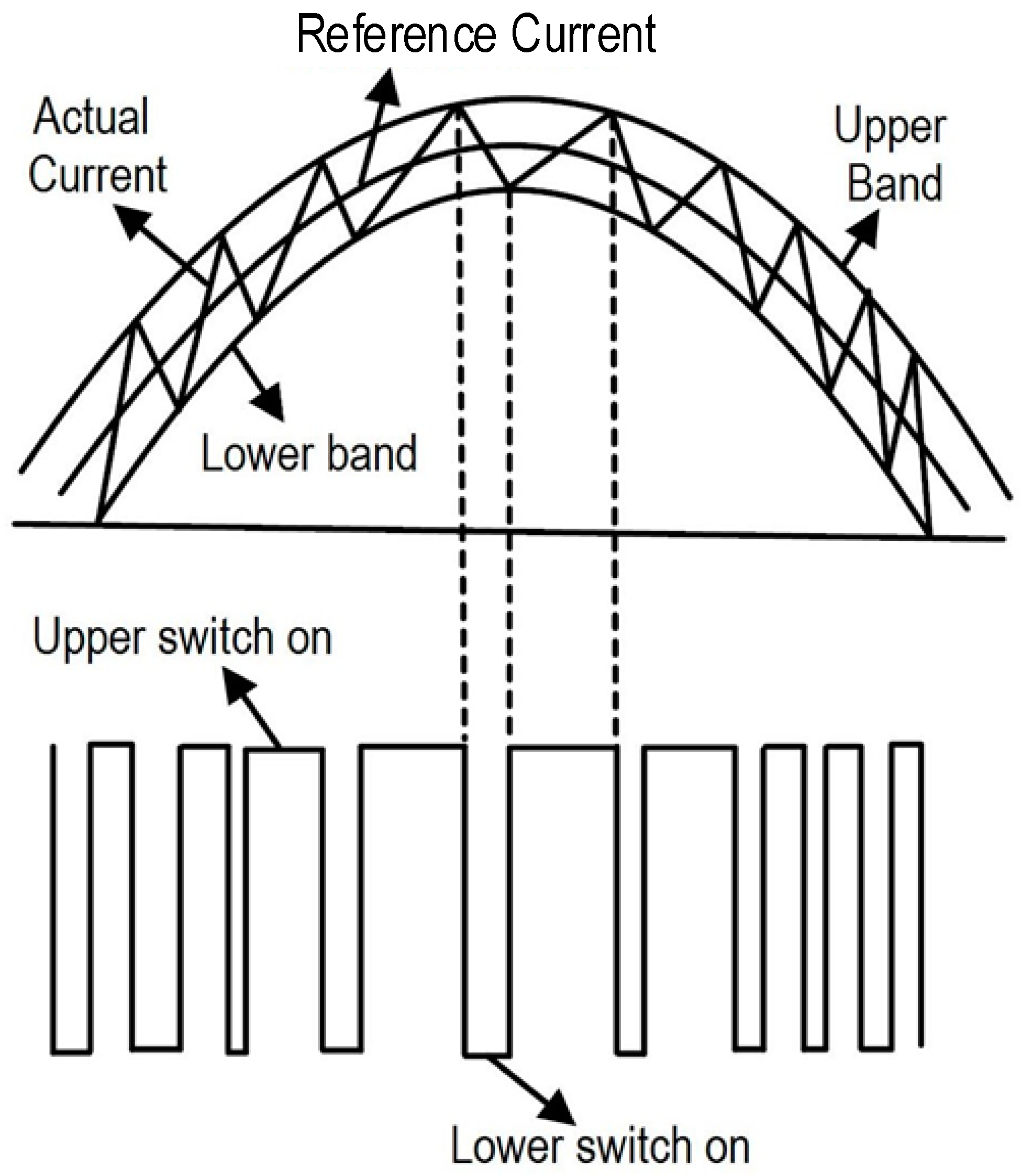
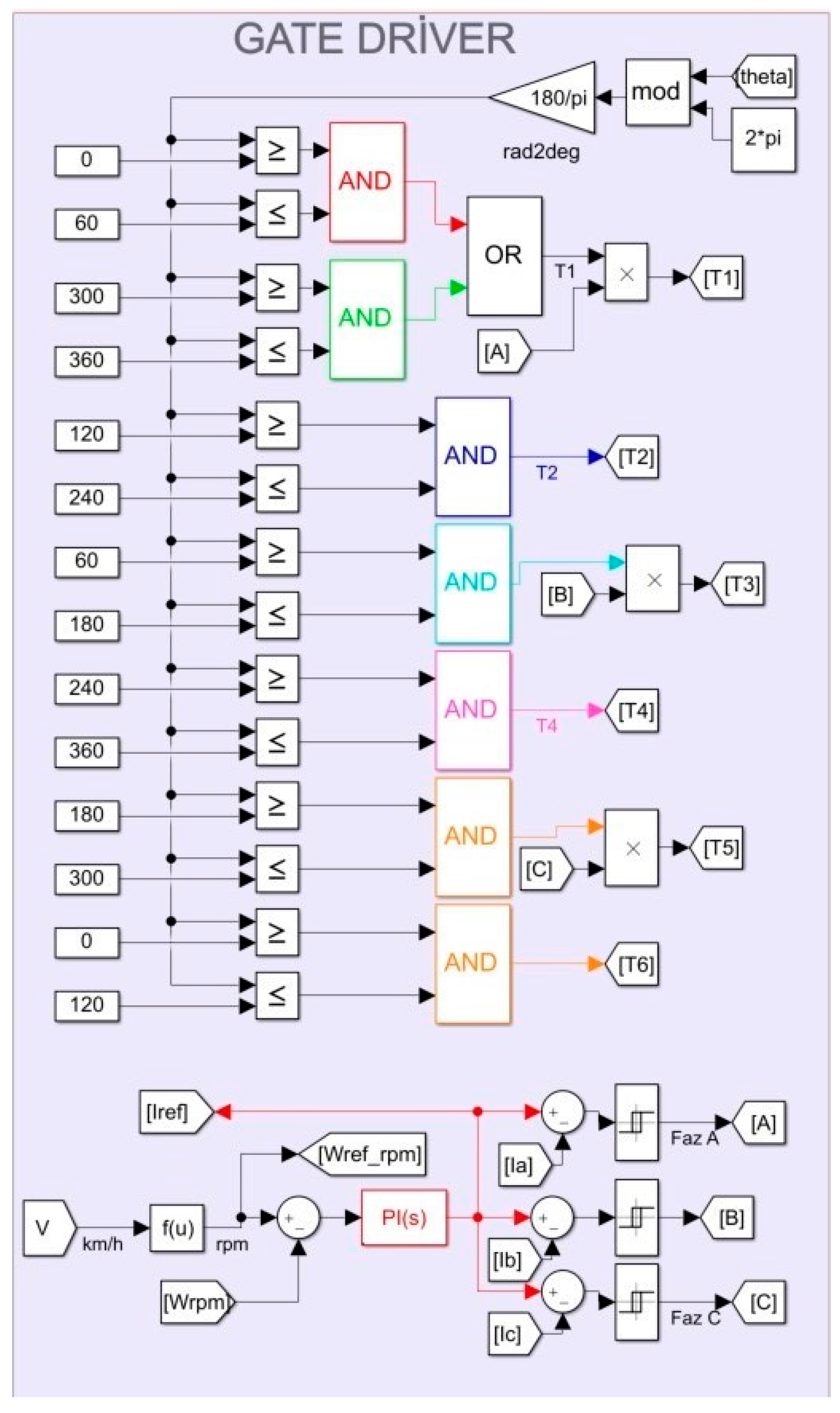
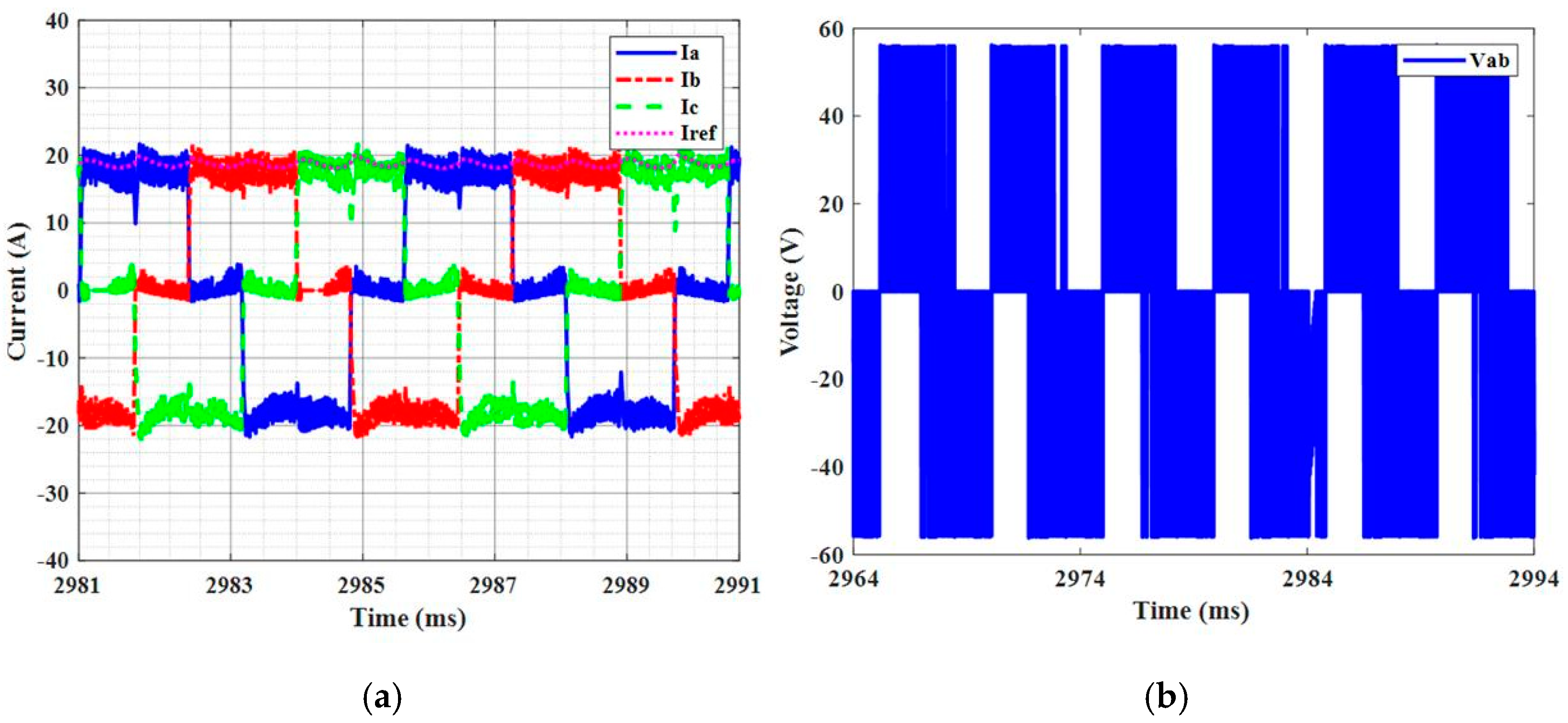
2.2.3. PMSM Driver
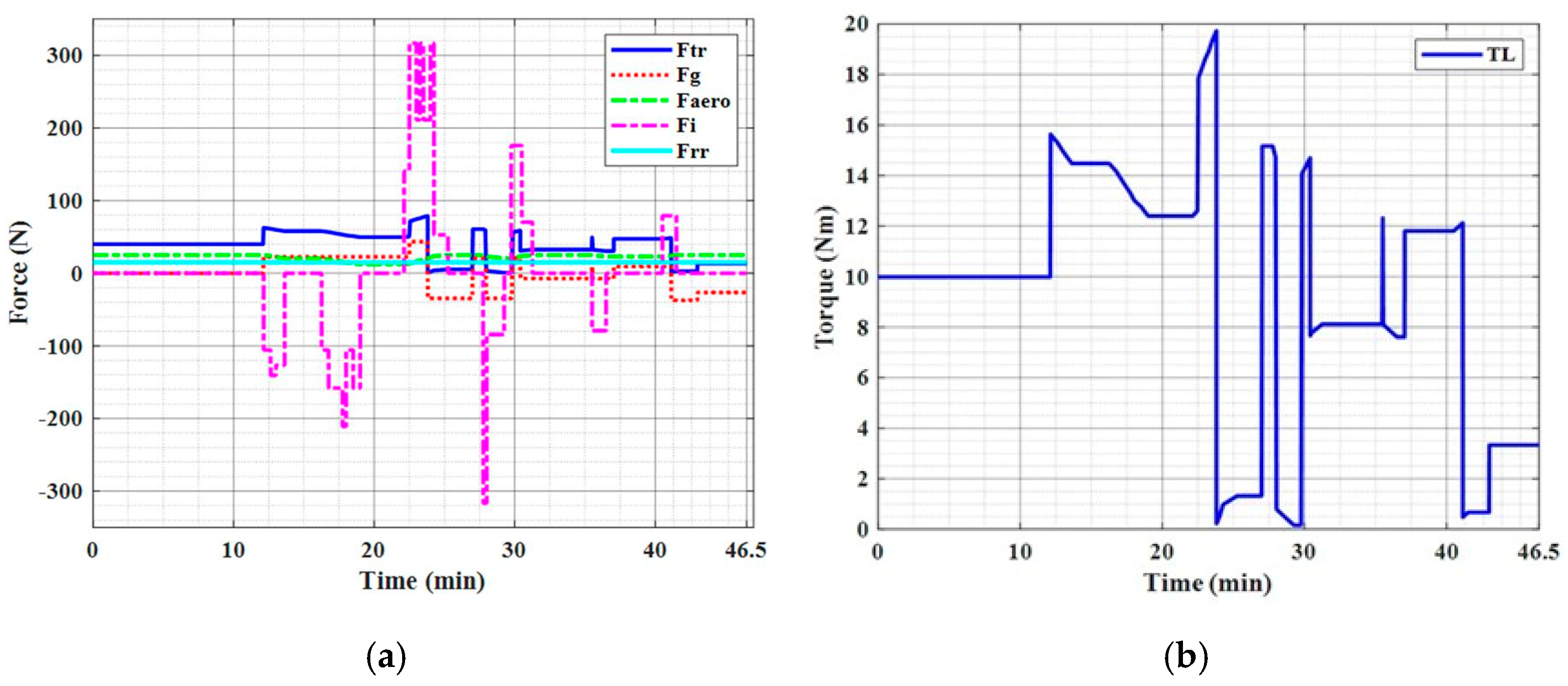
2.2.4. Force Calculation
3. Case Study
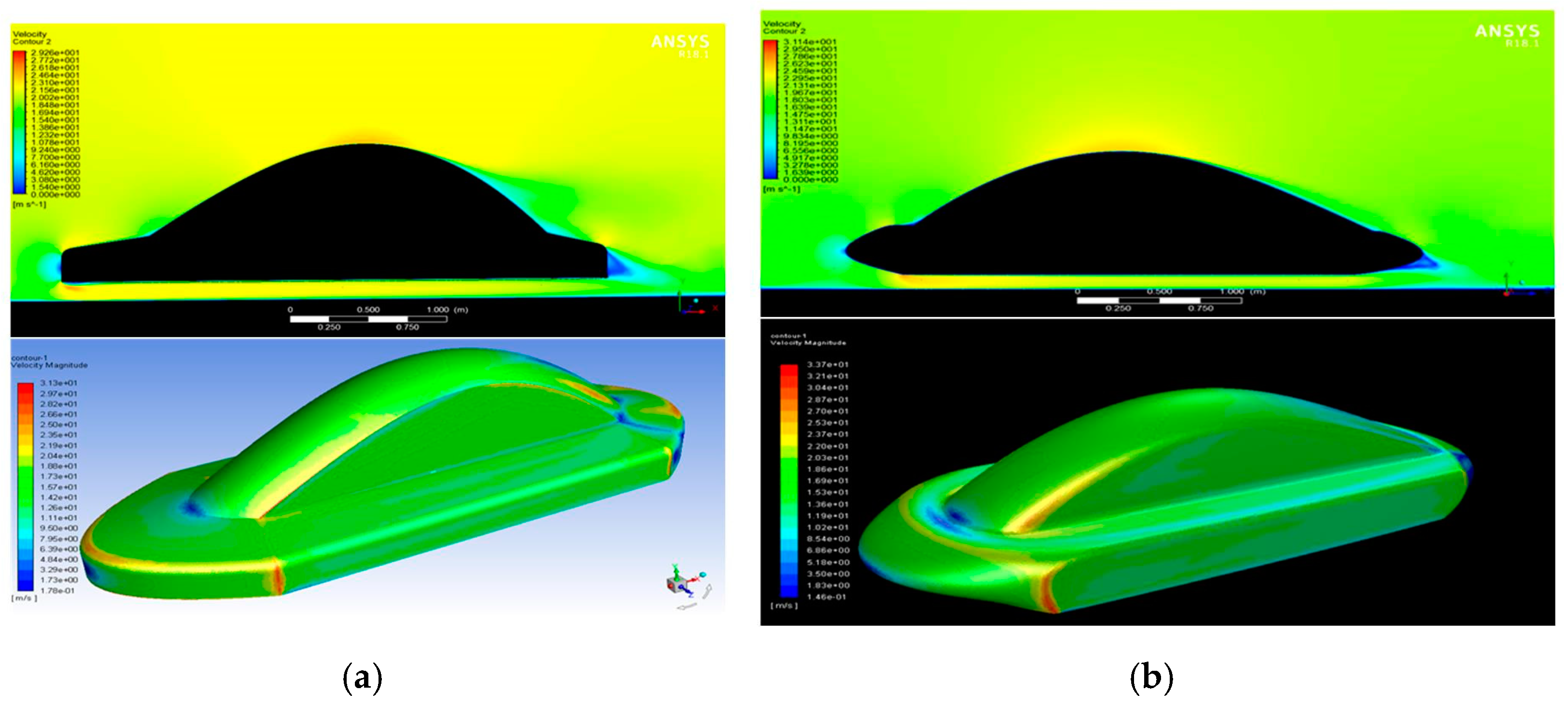
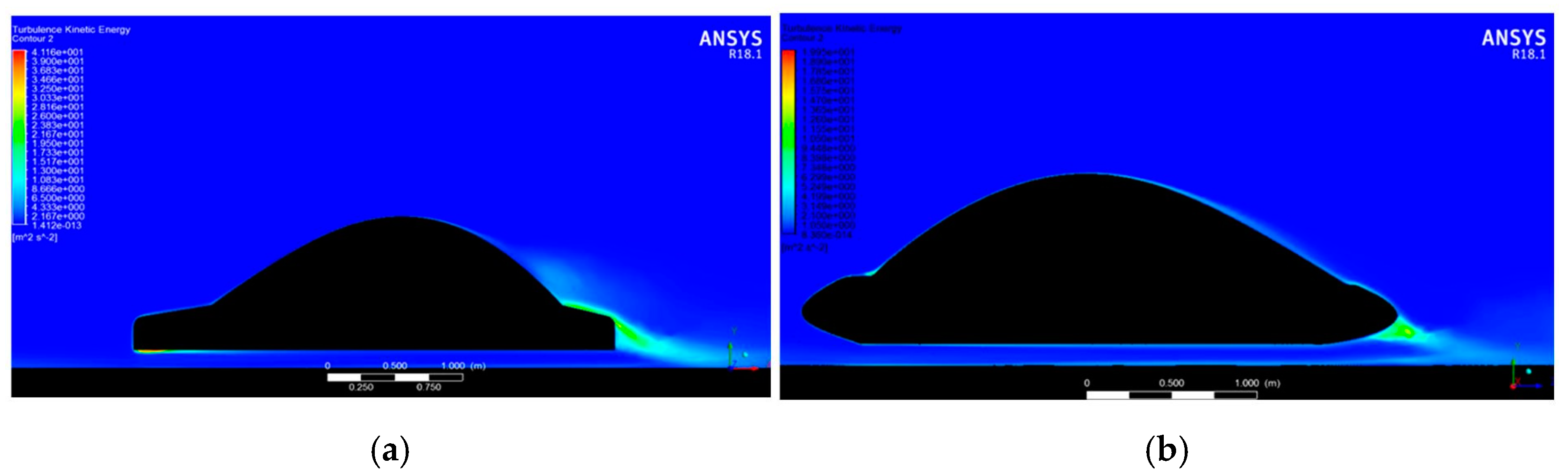
3.1. Aerodynamic Results
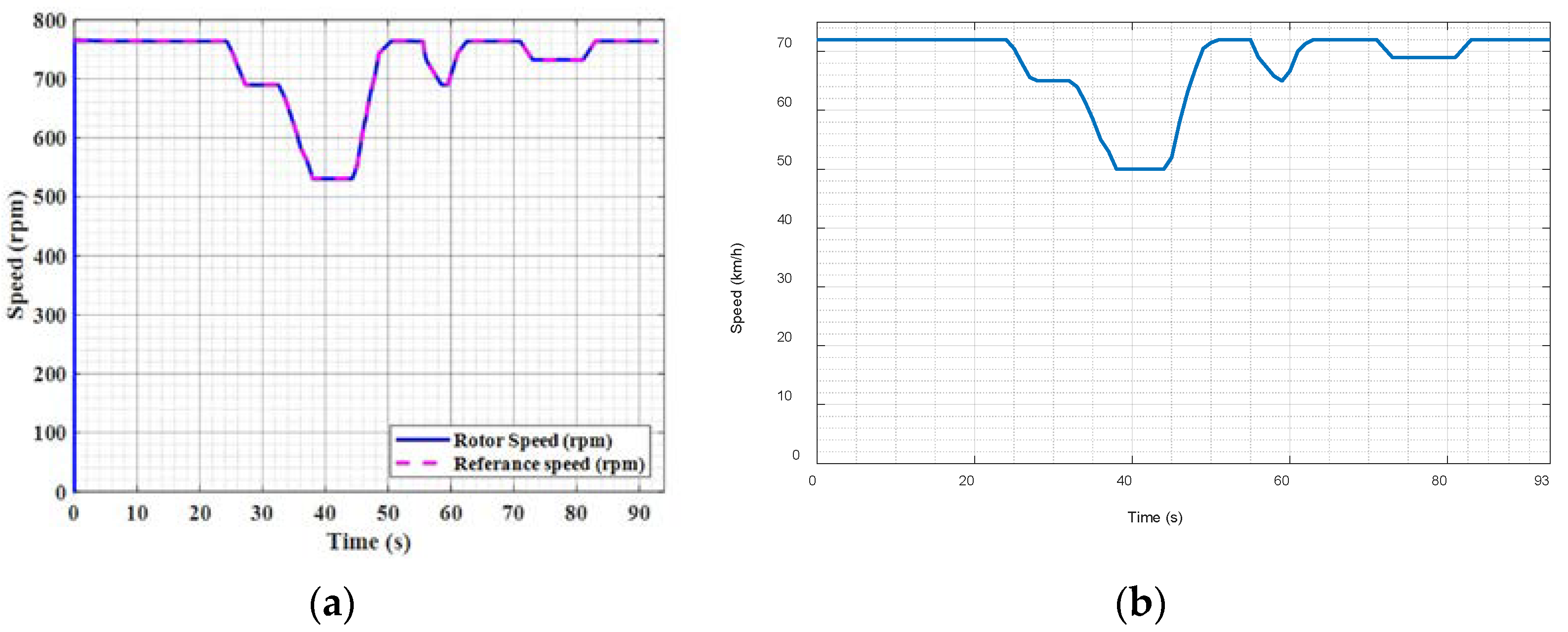
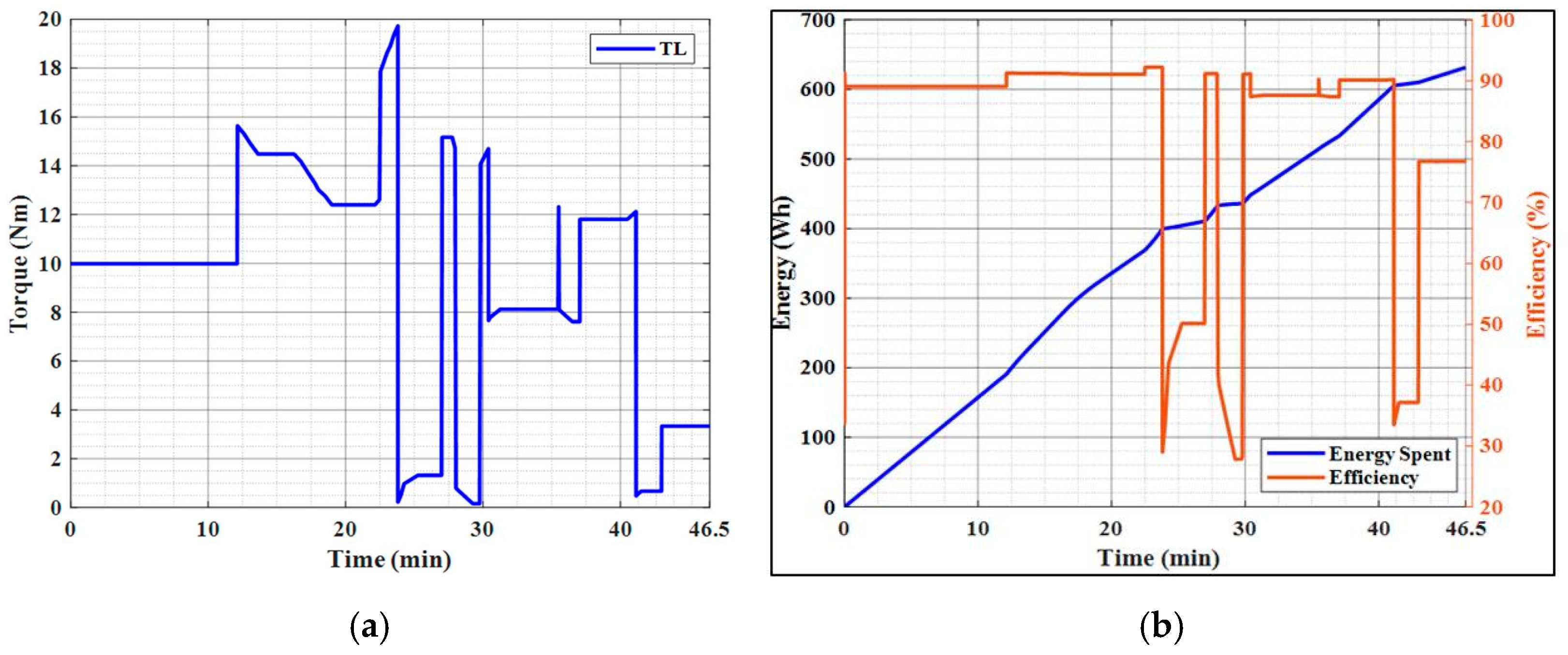
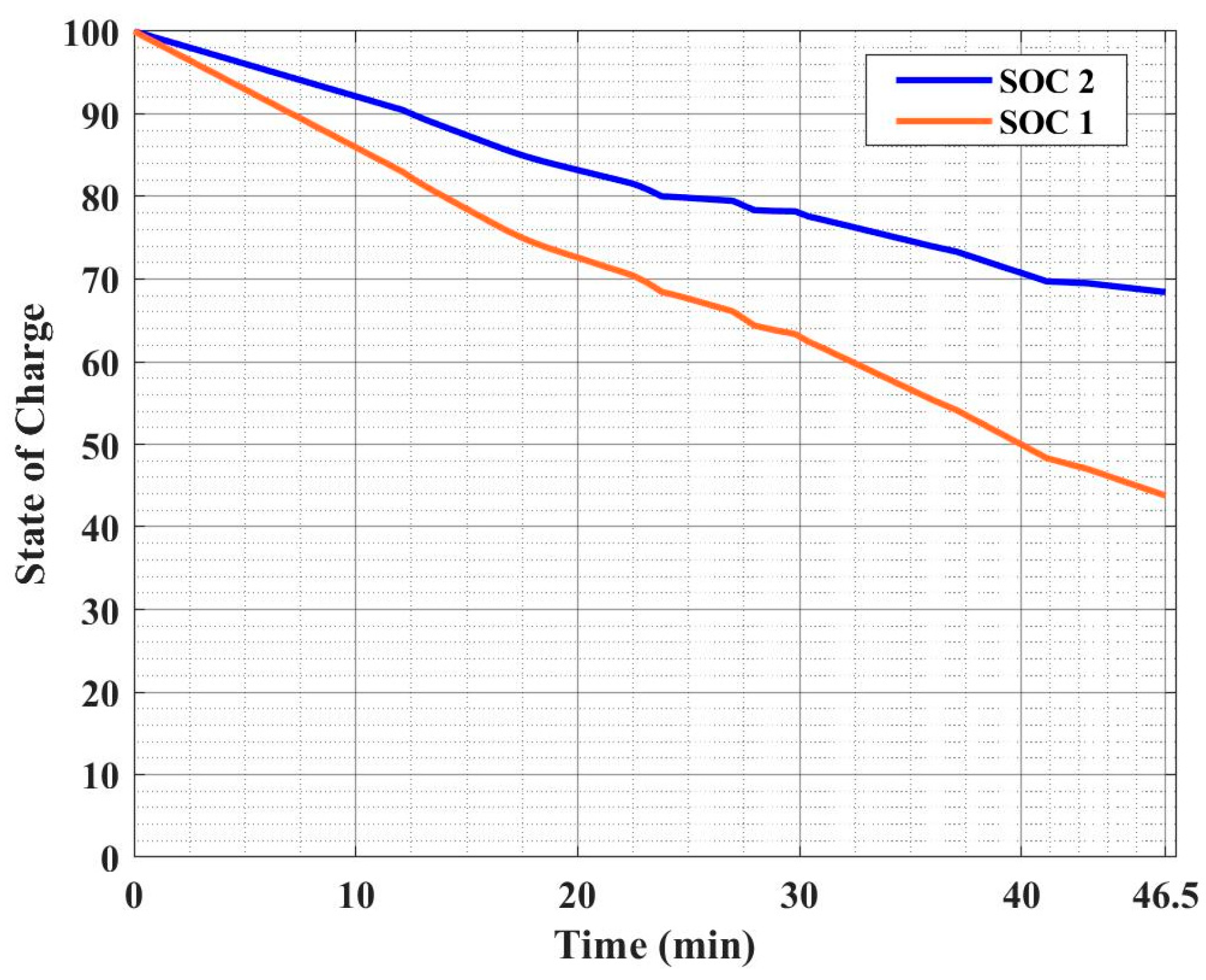
3.2. Electrical Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Naik, S.C.; Ali, A.H.M.H.; Lobo, A.R.; Sona, S.S.; Badiger, M. A Comprehensive Review of Electric Vehicles: A Smart Choice for Environmental Sustainability and Energy Conservation; IGI Global: Hershey, PA, USA, 2024; ISBN 9798369326121. [Google Scholar]
- Sun, X.; Li, Z.; Wang, X.; Li, C. Technology development of electric vehicles: A review. Energies 2019, 13, 90. [Google Scholar] [CrossRef]
- Jose, P.S.; Jose, P.S.H.; Wessley, G.J.J.; Rajalakshmy, P. Environmental Impact of Electric Vehicles; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Emadi, A.; Lee, Y.J.; Rajashekara, K. Power electronics and motor drives in electric, hybrid electric, and plug-in hybrid electric vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2237–2245. [Google Scholar] [CrossRef]
- Jeong, M.-J.; Lee, K.-B.; Pyo, H.-J.; Nam, D.-W.; Kim, W.-H.; Jeong, M.-J.; Lee, K.-B.; Pyo, H.-J.; Nam, D.-W.; Kim, W.-H.A. A Study on the Shape of the Rotor to Improve the Performance of the Spoke-Type Permanent Magnet Synchronous Motor. Energies 2021, 14, 3758. [Google Scholar] [CrossRef]
- Ahn, H.; Park, H.; Kim, C.; Lee, H. A Review of State-of-the-art Techniques for PMSM Parameter Identification. J. Electr. Eng. Technol. 2020, 15, 1177–1187. [Google Scholar] [CrossRef]
- Li, X.; Williamson, S.S. Assessment of efficiency improvement techniques for future power electronics intensive hybrid electric vehicle drive trains. In Proceedings of the 2007 IEEE Canada Electrical Power Conference, EPC 2007, Montreal, QC, Canada, 25–26 October 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 268–273. [Google Scholar]
- Sagar, A.; Kashyap, A.; Nasab, M.A.; Padmanaban, S.; Bertoluzzo, M.; Kumar, A.; Blaabjerg, F. A Comprehensive Review of the Recent Development of Wireless Power Transfer Technologies for Electric Vehicle Charging Systems. IEEE Access 2023, 11, 83703–83751. [Google Scholar] [CrossRef]
- Wang, W.; Chen, X.; Wang, J. Motor/Generator Applications in Electrified Vehicle Chassis-A Survey. IEEE Trans. Transp. Electrif. 2019, 5, 584–601. [Google Scholar] [CrossRef]
- Pindoriya, R.M.; Rajpurohit, B.S.; Kumar, R.; Srivastava, K.N. Comparative analysis of permanent magnet motors and switched reluctance motors capabilities for electric and hybrid electric vehicles. In Proceedings of the 2018 IEEMA Engineer Infinite Conference, eTechNxT 2018, New Delhi, India, 13–14 March 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Li, W.; Wan, Y. Classical Electric Machines for Electric and Hybrid Vehicles; Springer: Singapore, 2024; Volume Part F2211. [Google Scholar]
- Eldho Aliasand, A.; Josh, F.T. Selection of Motor foran Electric Vehicle: A Review. Mater. Today: Proc. 2020, 24, 1804–1815. [Google Scholar] [CrossRef]
- Liu, X.; Chen, H.; Zhao, J.; Belahcen, A. Research on the Performances and Parameters of Interior PMSM Used for Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3533–3545. [Google Scholar] [CrossRef]
- Estima, J.O.; Marques Cardoso, A.J. Efficiency analysis of drive train topologies applied to electric/hybrid vehicles. IEEE Trans. Veh. Technol. 2012, 61, 1021–1031. [Google Scholar] [CrossRef]
- Chirca, M.; Dranca, M.A.; Breban, S.; Oprea, C.A. PMSM Evaluation for Electric Drive Train for L6e Light Electric Vehicles. In Proceedings of the EPE 2020—Proceedings of the 2020 11th International Conference and Exposition on Electrical and Power Engineering, Iasi, Romania, 22–23 October 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 211–216. [Google Scholar]
- Zhang, H.; Wang, Y.; Hua, W.; Gerada, D.; Cheng, M. Analysis of the Flux Density and Back EMF in Eccentric Permanent Magnet Machines Based on 2-D Air-Gap Modulation Theory. IEEE Trans. Transp. Electrif. 2022, 8, 4325–4336. [Google Scholar] [CrossRef]
- Polat, M.; Yildiz, A.; Akinci, R. Performance Analysis and Reduction of Torque Ripple of Axial Flux Permanent Magnet Synchronous Motor Manufactured for Electric Vehicles. IEEE Trans. Magn. 2021, 57, 1–9. [Google Scholar] [CrossRef]
- Shahina, S.; Muhammed, F. Review of Speed Controlling Techniques on Dual PMSM Drive Systems. In Proceedings of the International Conference on Futuristic Technologies in Control Systems and Renewable Energy (ICFCR 2022), Malappuram, India, 21–22 July 2022. [Google Scholar]
- Keskin Arabul, F.; Senol, I.; Oner, Y. Performance Analysis of Axial-Flux Induction Motor with Skewed Rotor. Energies 2020, 13, 4991. [Google Scholar] [CrossRef]
- Guan, Y.; Zhu, Z.Q.; Afinowi, I.A.A.; Mipo, J.C.; Farah, P. Comparison between induction machine and interior permanent magnet machine for electric vehicle application. Compel-Int. J. Comput. Math. Electr. Electron. Eng. 2016, 35, 572–585. [Google Scholar] [CrossRef]
- Kose, O.; Oktay, T. Simultaneous quadrotor autopilot system and collective morphing system design. Aircr. Eng. Aerosp. Technol. 2020, 92, 1093–1100. [Google Scholar] [CrossRef]
- Mushid, F.C.; Dorrell, D.G. Review of axial flux induction motor for automotive applications. In Proceedings of the 2017 IEEE Workshop on Electrical Machines Design, Control and Diagnosis, WEMDCD 2017, Nottingham, UK, 20–21 April 2017; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017; pp. 146–151. [Google Scholar]
- Cao, Z.; Mahmoudi, A.; Kahourzade, S.; Soong, W.L. An Overview of Axial-Flux Induction Machine. In Proceedings of the 2021 31st Australasian Universities Power Engineering Conference, AUPEC 2021, Perth, Australia, 26–30 September 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Bitsi, K.; Bosga, S.G. A Case Study of Pole-Phase Changing Induction Machine Performance. In Proceedings of the 24th European Conference on Power Electronics and Applications, EPE 2022 ECCE Europe, Hanover, Germany, 5–9 September 2022. [Google Scholar]
- Garip, S.; Yasa, Y. Design of Outer Runner-Type Brushless Permanent Magnet DC Motor for Lightweight E-Vehicles. In Proceedings of the 2020 6th International Conference on Electric Power and Energy Conversion Systems, EPECS 2020, Istanbul, Turkey, 5–7 October 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 151–156. [Google Scholar]
- Hucho, W.H.; Sovran, G. Aerodynamics of road vehicles. Annu. Rev. Fluid Mech. 1993, 25, 485–537. [Google Scholar] [CrossRef]
- Damjanović, D.; Kozak, D.; Živić, M.; Ivandić, Ž.; Baškarić, T. CFD analysis of concept car in order to improve aerodynamics. Járműipari Innováció 2011, 1, 108–115. [Google Scholar]
- Koenig-Fachsenfeld, R.V.; Ruehle, D.; Eckert, A.; Zeuner, M. Windkanalmessungen an Omnibusmodellen. ATZ 1936, 39, 143–149. [Google Scholar]
- Anderson, J.D.; Wendt, J. Computational Fluid Dynamics; Springer: New York, NY, USA, 1995. [Google Scholar]
- Ansys Inc. ANSYS CFX User’s Guide; Ansys Inc.: Kirkland, WA, USA, 2017. [Google Scholar]
- Hetawal, S.; Gophane, M.; Ajay, B.K.; Mukkamala, Y. Aerodynamic Study of Formula SAE Car. Procedia Eng. 2014, 97, 1198–1207. [Google Scholar] [CrossRef]
- Hinterberger, C.; García-Villalba, M.; Rodi, W. Large eddy simulation of flow around the Ahmed body. Aerodyn. Heavy Veh. Truck. Buses Trains. Lect. Notes Appl. Comput. Mech. 2004, 19, 77–87. [Google Scholar] [CrossRef]
- Ahmed, S.R.; Ramm, G.; Faltin, G. Some Salient Features of the Time -Averaged Ground Vehicle Wake. SAE Trans. SAE Int. 1984, 93, 473–503. [Google Scholar]
- Miri, I.; Fotouhi, A.; Ewin, N. Electric vehicle energy consumption modelling and estimation—A case study. Int. J. Energy Res. 2021, 45, 501–520. [Google Scholar] [CrossRef]
- Hong, J.; Park, S.; Chang, N. Accurate remaining range estimation for Electric vehicles. In Proceedings of the Asia and South Pacific Design Automation Conference, ASP-DAC, Macao, China, 25–28 January 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 781–786. [Google Scholar]
- Kim, D.M.; Jung, Y.H.; Cha, K.S.; Lim, M.S. Design of Traction Motor for Mitigating Energy Consumption of Light Electric Vehicle Considering Material Properties and Drive Cycles. Int. J. Automot. Technol. 2020, 21, 1391–1399. [Google Scholar] [CrossRef]
- Wu, X.; Freese, D.; Cabrera, A.; Kitch, W.A. Electric vehicles’ energy consumption measurement and estimation. Transp. Res. Part D Transp. Environ. 2015, 34, 52–67. [Google Scholar] [CrossRef]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- De Cauwer, C.; Van Mierlo, J.; Coosemans, T. Energy Consumption Prediction for Electric Vehicles Based on Real-World Data. Energies 2015, 8, 8573–8593. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, E. Electric vehicles’ energy consumption estimation with real driving condition data. Transp. Res. Part D Transp. Environ. 2015, 41, 177–187. [Google Scholar] [CrossRef]
- De Cauwer, C.; Verbeke, W.; Coosemans, T.; Faid, S.; Van Mierlo, J. A Data-Driven Method for Energy Consumption Prediction and Energy-Efficient Routing of Electric Vehicles in Real-World Conditions. Energies 2017, 10, 608. [Google Scholar] [CrossRef]
- Kriesel, D. A Brief Introduction on Neural Networks; Citeseer: Princeton, NJ, USA, 2007. [Google Scholar]
- Qi, X.; Wu, G.; Boriboonsomsin, K.; Barth, M.J. Data-driven decomposition analysis and estimation of link-level electric vehicle energy consumption under real-world traffic conditions. Transp. Res. Part D Transp. Environ. 2018, 64, 36–52. [Google Scholar] [CrossRef]
- Erzi, A.I. Tasit Teknigi-Ders Notlari; ITU Makina Fakultesi: Istanbul, Türkiye, 1998. [Google Scholar]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method; Pearson Education: London, UK, 2007. [Google Scholar]
- Wu, H.X.; Cheng, S.K.; Cui, S.M. A controller of brushless DC motor for electric vehicle. IEEE Trans. Magn. 2005, 41, 509–513. [Google Scholar] [CrossRef]
- Schaltz, E. Electrical Vehicle Design and Modeling, 1st ed.; Soylu, S., Ed.; InTech: Rijeka, Croatia, 2011. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aslan, E.; Yasa, Y.; Meseci, Y.; Keskin Arabul, F.; Arabul, A.Y. Comprehensive Multidisciplinary Electric Vehicle Modeling: Investigating the Effect of Vehicle Design on Energy Consumption and Efficiency. Sustainability 2024, 16, 4928. https://doi.org/10.3390/su16124928
Aslan E, Yasa Y, Meseci Y, Keskin Arabul F, Arabul AY. Comprehensive Multidisciplinary Electric Vehicle Modeling: Investigating the Effect of Vehicle Design on Energy Consumption and Efficiency. Sustainability. 2024; 16(12):4928. https://doi.org/10.3390/su16124928
Chicago/Turabian StyleAslan, Eyyup, Yusuf Yasa, Yunus Meseci, Fatma Keskin Arabul, and Ahmet Yigit Arabul. 2024. "Comprehensive Multidisciplinary Electric Vehicle Modeling: Investigating the Effect of Vehicle Design on Energy Consumption and Efficiency" Sustainability 16, no. 12: 4928. https://doi.org/10.3390/su16124928