
Integrating Firefly and Crow Algorithms for the Resilient Sizing and Siting of Renewable Distributed Generation Systems under Faulty Scenarios



Abstract
:1. Introduction
1.1. Motivation and Incitement
1.2. Literature Review and Research Gap
1.3. Novelty and Contributions
- ▪
- A thorough examination and assessment of the sizing and siting of RDGs are conducted under N-1 faulty line conditions, specifically focusing on faulty lines F27-29 and F27-30 within the IEEE 30-bus power distribution system, which cause overloading issues. The severity ranking index, which considers both voltage deviation and overloading, was employed to determine the most severe N-1 faulty line.
- ▪
- The utilization of the firefly algorithm combined with the crow search optimizer to achieve optimal RDG sizing and allocation by solving the OPF problem under the most severe N-1 line (F27-30) with three candidate buses 27, 29, and 30 (nearest buses to faulty line F27-30).
- ▪
- The optimization process incorporates multiple techno-economic objectives, including overall costs, power losses, and voltage deviation. The hybrid optimizer eliminates impractical solutions automatically, retaining practical ones, thus enhancing both global search capabilities and local search proficiency.
- ▪
- The findings obtained indicate that the optimal allocation and sizing of DGs at bus 30 effectively alleviated line overloading in scenarios F27-30 and F27-29, ensuring compliance with the line flow limit. Furthermore, it led to a reduction in total costs and enhancements in the voltage profile compared to an equivalent case without RDGs.
2. Description of the IEEE 30-Bus Distribution System under N-1 Faulty Conditions
- Apply a line outage or fault to the line between bus 27 and 29 (F27-29) and the line between bus 27 and 30 (F27-29) separately.
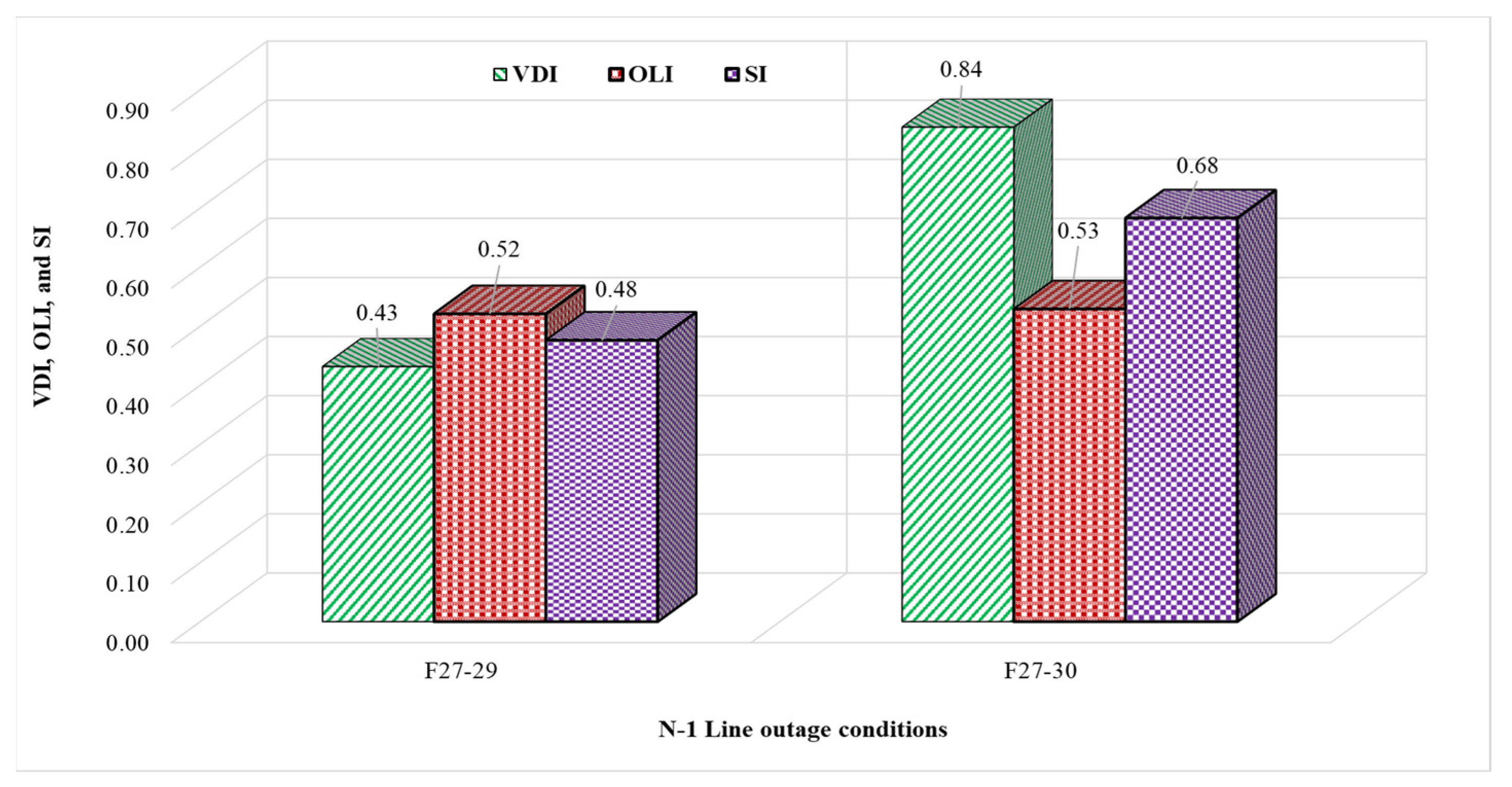
- Identify the most critical N-1 faulty line among F27-29 and F27-30 by employing the severity index (SI). The SI comprises two weighted indices: the voltage deviation index (VDI) and the overloading index (OLI). The VDI provides insights into the power system’s quality, whereas the OLI provides insights into its reliability. Consequently, the SI serves as an assessment tool for both the reliability and quality of the power system and can be defined as follows [4]:
- 3.
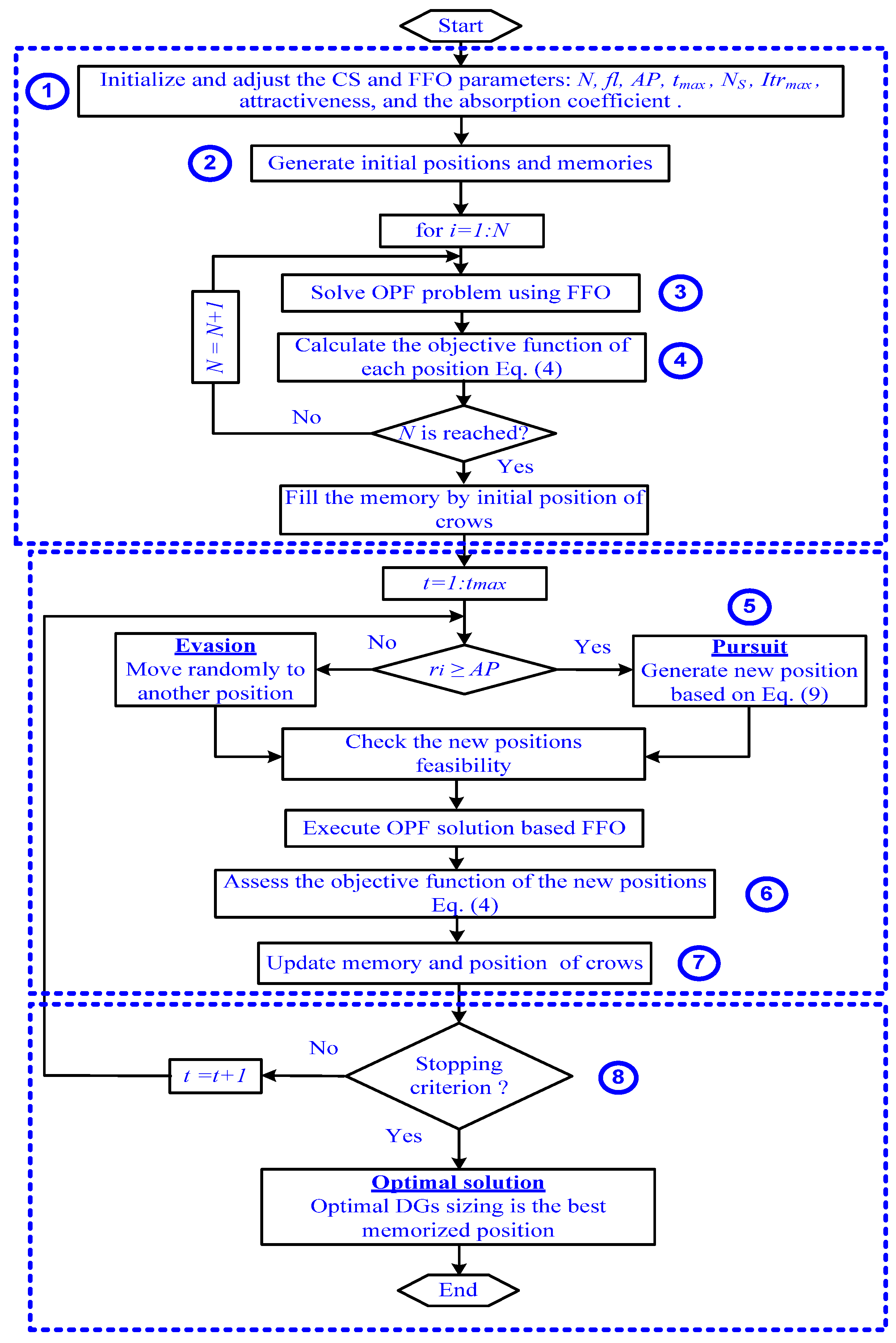
- Solve the OPF optimization problem under the most severe N-l line (F27-30) with three candidate buses (27, 29, and 30, i.e., the nearest buses to faulty line F27-30) using the firefly algorithm combined with the crow search optimizer. Using the firefly algorithm in combination with the crow search optimizer can eliminate the impractical buses/solutions while retaining the practical one. As a result, the combination of the firefly algorithm and crow search optimizer is used to achieve optimal RDG siting and sizing.
- 4.
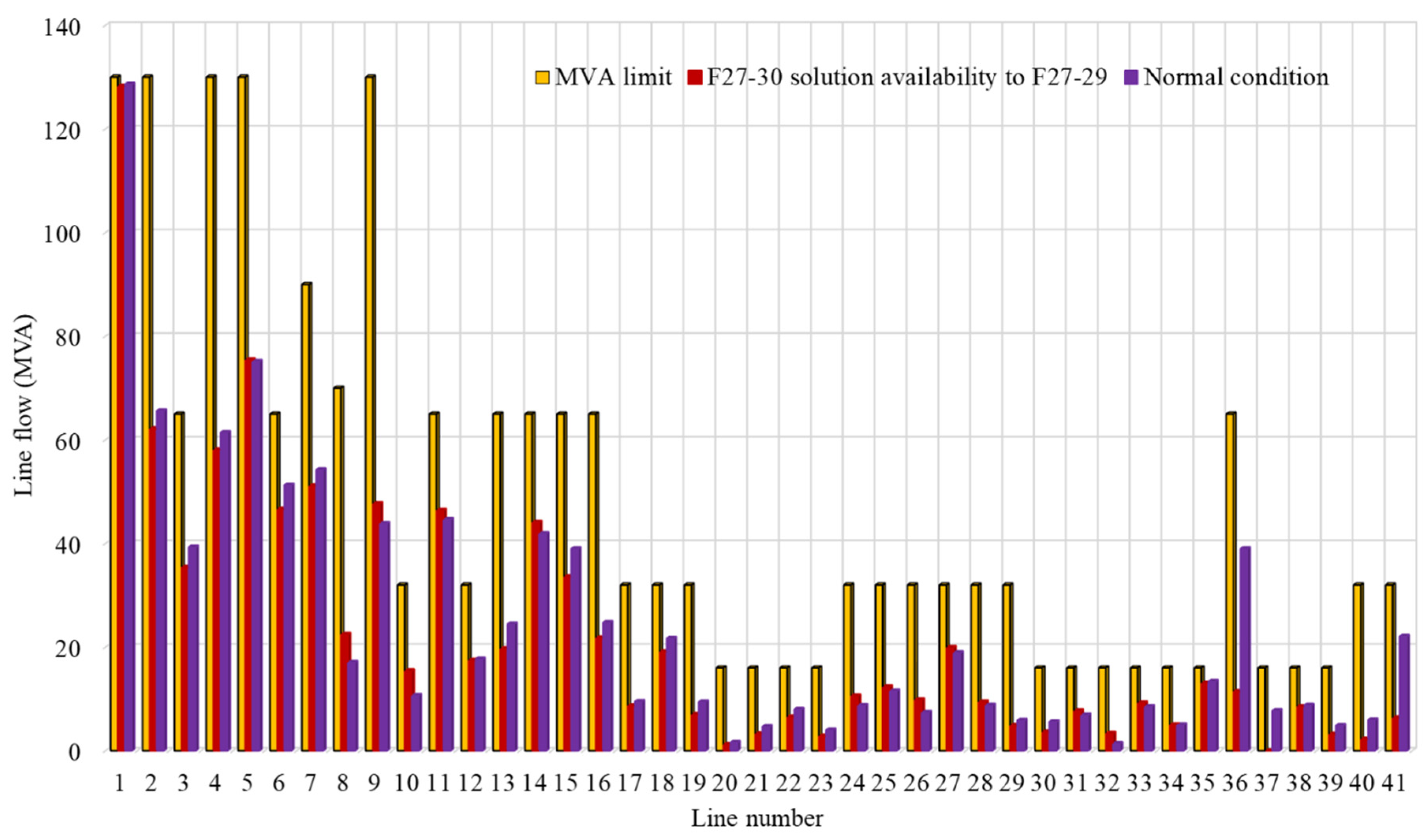
- Check the OPF solution availability with F27-30 to other N-l faulty lines (F27-29) in terms of transmission line loading percent and voltage profile.
3. Hybrid CS-FFA Approach for Optimal RDG Sizing and Siting under N-1 Faulty Line Conditions
- ➢
- Global Searching Efficiency of the Crow Search Optimizer (CS):
- ➢
- Local Searching Efficiency of the Firefly Algorithm (FFA):
- ➢
- Synergy between the CS optimizer and FFA:
4. Simulation Results and Discussion
- ▪
- F27-29: This fault occurs between buses 27 and 29.
- ▪
- F27-30: This fault occurs between buses 27 and 30.
- ▪
- Both faults, F27-29, and F27-30, exhibit a reciprocal impact, causing overloading that not only affects their respective lines but also influences the other line, as depicted in Figure 4.

- Network Resilience and Reinforcement: The fact that both faults cause overloading on the other line suggests a lack of redundancy or alternative paths for power flow. In a well-designed power grid, there should be multiple routes for electricity to flow, allowing for a certain degree of fault tolerance (N-1 reliability). Therefore, in this study, the authors considered upgrading or reinforcing the network by adding new renewable DGs at the critical buses to create redundancy and reduce the likelihood of overloading during faults.
- Protection Coordination: Overloading can lead to equipment damage or outages. It is crucial to ensure that protective devices such as circuit breakers and relays are coordinated correctly to isolate the faulty section of the network without causing cascading failures.
- Load Shedding and Control: During fault conditions, automated load shedding or generation control may be necessary to alleviate overloading and maintain system stability. These control actions should be designed to prioritize critical loads.
- Fault Analysis: Conduct a detailed analysis of fault currents and study the coordination of protection devices (relays, CBs) to ensure they operate correctly during faults.
- ▪
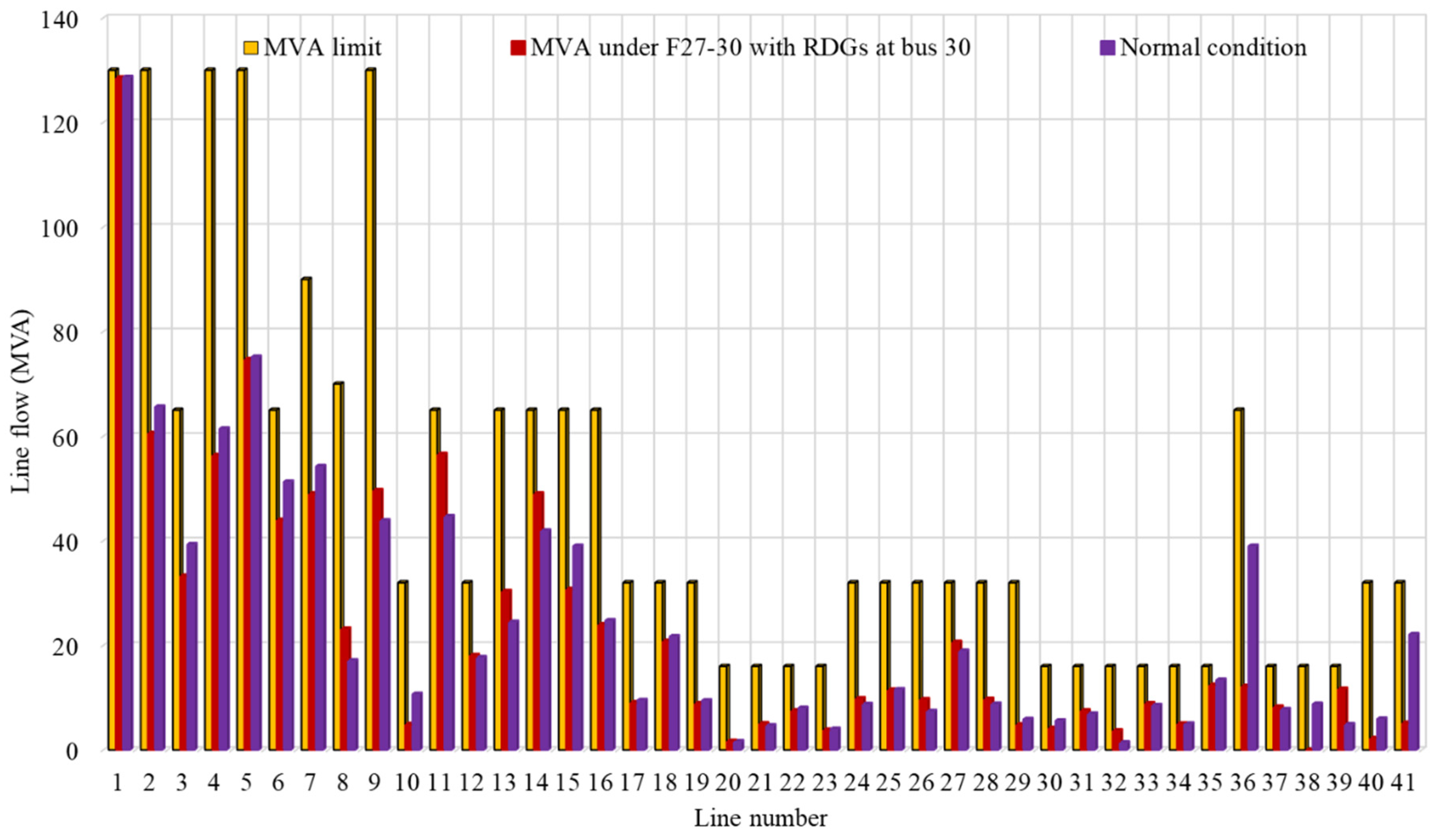
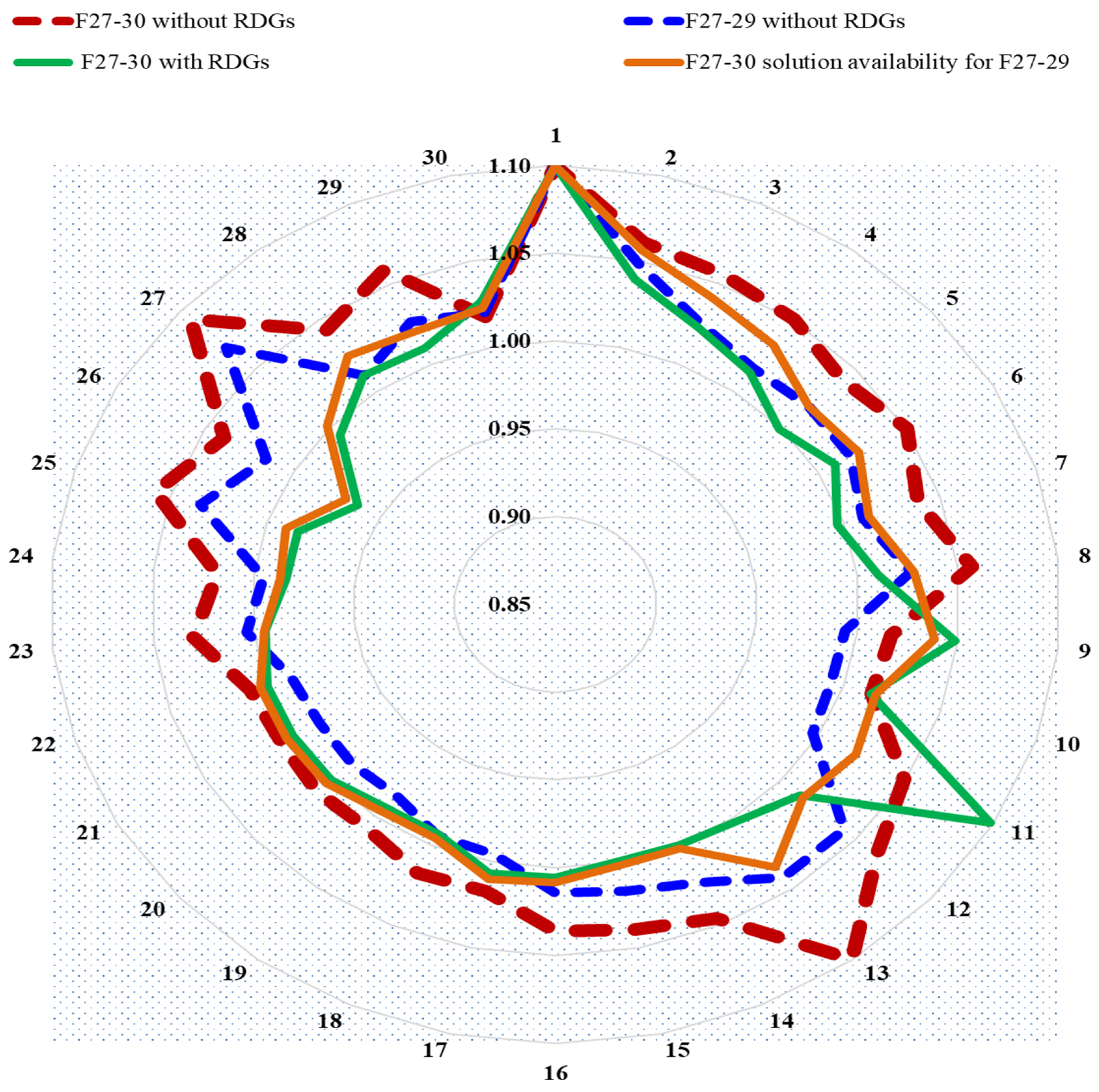
- Base Condition: The TLL% is first calculated for all transmission lines without DG units, representing the system’s initial or base condition. This serves as a reference point.
- ▪
- With DG Units: The TLL% is then recalculated for all transmission lines with DG units installed, considering the specific N-1 faulty line scenarios (e.g., F27-29 or F27-30). This reflects the system’s condition with DG integration.
- ▪
- TLL% and DG Impact: The TLL% provides a direct measure of how much the transmission lines are being utilized concerning their maximum capacity. A decrease in the TLL% indicates that the transmission lines are operating at a lower percentage of their maximum capacity, which can be beneficial. Lower TLL% values prove that there is a lower risk of overloading transmission lines, voltage instability, and other operational issues. When the TLL% decreases with the integration of DG units, it implies that the DG units are helping to alleviate line congestion and improve the system’s capacity to accommodate generation and demand.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zangiabadi, M.; Feuillet, R.; Lesani, H.; Hadj-Said, N.; Kvaløy, J.T. Assessing the performance and benefits of customer distributed generation developers under uncertainties. Energy 2011, 36, 1703–1712. [Google Scholar] [CrossRef]
- Soroudi, A.; Ehsan, M. A distribution network expansion planning model considering distributed generation options and techo-economical issues. Energy 2010, 35, 3364–3374. [Google Scholar] [CrossRef]
- Bracco, S.; Dentici, G.; Siri, S. Economic and environmental optimization model for the design and the operation of a combined heat and power distributed generation system in an urban area. Energy 2013, 55, 1014–1024. [Google Scholar] [CrossRef]
- Farh, H.M.; Al-Shaalan, A.M.; Eltamaly, A.M.; Al-Shamma’a, A.A. A novel severity performance index for optimal allocation and sizing of photovoltaic distributed generations. Energy Rep. 2020, 6, 2180–2190. [Google Scholar] [CrossRef]
- Mahdad, B.; Srairi, K. Adaptive differential search algorithm for optimal location of distributed generation in the presence of SVC for power loss reduction in distribution system. Eng. Sci. Technol. Int. J. 2016, 19, 1266–1282. [Google Scholar] [CrossRef]
- Hung, D.Q.; Mithulananthan, N. Multiple distributed generator placement in primary distribution networks for loss reduction. IEEE Trans. Ind. Electron. 2013, 60, 1700–1708. [Google Scholar] [CrossRef]
- Ghasemi, M.; Pavel, T.; Eva, T.; Mohsen, Z. Gaussian bare-bones Levy circulatory system-based optimization for power flow in the presence of renewable units. Eng. Sci. Technol. Int. J. 2023, 47, 101551. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Orozco-Henao, G. Vortex search and Chu-Beasley genetic algorithms for optimal location and sizing of distributed generators in distribution networks: A novel hybrid approach. Eng. Sci. Technol. Int. J. 2020, 23, 1351–1363. [Google Scholar] [CrossRef]
- Kayal, P.; Chanda, C. Placement of wind and solar based DGs in distribution system for power loss minimization and voltage stability improvement. Int. J. Electr. Power Energy Syst. 2013, 53, 795–809. [Google Scholar] [CrossRef]
- Hung, D.Q.; Mithulananthan, N.; Bansal, R. Analytical strategies for renewable distributed generation integration considering energy loss minimization. Appl. Energy 2013, 105, 75–85. [Google Scholar] [CrossRef]
- Lakum, A.; Vasundhara, M. A novel approach for optimal placement and sizing of active power filters in radial distribution system with nonlinear distributed generation using adaptive grey wolf optimizer. Eng. Sci. Technol. Int. J. 2021, 24, 911–924. [Google Scholar] [CrossRef]
- Hung, D.Q.; Mithulananthan, N.; Bansal, R.C. Analytical Expressions for DG Allocation in Primary Distribution Networks. IEEE Trans. Energy Convers. 2010, 25, 814–820. [Google Scholar] [CrossRef]
- Gözel, T.; Hocaoglu, M.H. An analytical method for the sizing and siting of distributed generators in radial systems. Electr. Power Syst. Res. 2009, 79, 912–918. [Google Scholar] [CrossRef]
- Viral, R.; Khatod, D. An analytical approach for sizing and siting of DGs in balanced radial distribution networks for loss minimization. Int. J. Electr. Power Energy Syst. 2015, 67, 191–201. [Google Scholar] [CrossRef]
- Rambabu, T.; Prasad, P.V. Optimal placement and sizing of DG based on power stability index in radial distribution system. In Proceedings of the 2014 International Conference on Smart Electric Grid (ISEG), Guntur, India, 19–20 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–5. [Google Scholar]
- Prakash, P.; Khatod, D.K. Optimal sizing and siting techniques for distributed generation in distribution systems: A review. Renew. Sustain. Energy Rev. 2016, 57, 111–130. [Google Scholar] [CrossRef]
- Al-Shamma’a, A.A.; Alturki, F.A.; Farh, H.M. Techno-economic assessment for energy transition from diesel-based to hybrid energy system-based off-grids in Saudi Arabia. Energy Transit. 2020, 4, 31–43. [Google Scholar] [CrossRef]
- Rahmani-Andebili, M. Simultaneous placement of DG and capacitor in distribution network. Electr. Power Syst. Res. 2016, 131, 1–10. [Google Scholar] [CrossRef]
- Gampa, S.R.; Das, D. Optimum placement and sizing of DGs considering average hourly variations of load. Int. J. Electr. Power Energy Syst. 2015, 66, 25–40. [Google Scholar] [CrossRef]
- Mohanty, B.; Tripathy, S. A teaching learning based optimization technique for optimal location and size of DG in distribution network. J. Electr. Syst. Inf. Technol. 2016, 3, 33–44. [Google Scholar] [CrossRef]
- Farh, H.M.; Al-Shamma’a, A.A.; Al-Shaalan, A.M.; Alkuhayli, A.; Noman, A.M.; Kandil, T. Technical and economic evaluation for off-grid hybrid renewable energy system using novel bonobo optimizer. Sustainability 2022, 14, 1533. [Google Scholar] [CrossRef]
- Bouhouras, A.S.; Sgouras, K.I.; Gkaidatzis, P.A.; Labridis, D.P. Optimal active and reactive nodal power requirements towards loss minimization under reverse power flow constraint defining DG type. Int. J. Electr. Power Energy Syst. 2016, 78, 445–454. [Google Scholar] [CrossRef]
- Omotoso, H.O.; Al-Shaalan, A.M.; Farh, H.M.; Al-Shamma’a, A.A. Techno-economic evaluation of hybrid energy systems using artificial ecosystem-based optimization with demand side management. Electronics 2022, 11, 204. [Google Scholar] [CrossRef]
- Poornazaryan, B.; Karimyan, P.; Gharehpetian, G.; Abedi, M. Optimal allocation and sizing of DG units considering voltage stability, losses and load variations. Int. J. Electr. Power Energy Syst. 2016, 79, 42–52. [Google Scholar] [CrossRef]
- Hassan, A.S.; Sun, Y.; Wang, Z. Multi-objective for optimal placement and sizing DG units in reducing loss of power and enhancing voltage profile using BPSO-SLFA. Energy Rep. 2020, 6, 1581–1589. [Google Scholar] [CrossRef]
- Moradi, M.; Abedini, M. A novel method for optimal DG units capacity and location in Microgrids. Int. J. Electr. Power Energy Syst. 2016, 75, 236–244. [Google Scholar] [CrossRef]
- Borges, C.L.; Falcao, D.M. Optimal distributed generation allocation for reliability, losses, and voltage improvement. Int. J. Electr. Power Energy Syst. 2006, 28, 413–420. [Google Scholar] [CrossRef]
- Zeinalzadeh, A.; Mohammadi, Y.; Moradi, M.H. Optimal multi objective placement and sizing of multiple DGs and shunt capacitor banks simultaneously considering load uncertainty via MOPSO approach. Int. J. Electr. Power Energy Syst. 2015, 67, 336–349. [Google Scholar] [CrossRef]
- Alanazi, A.; Alanazi, T.I. Multi-Objective Framework for Optimal Placement of Distributed Generations and Switches in Reconfigurable Distribution Networks: An Improved Particle Swarm Optimization Approach. Sustainability 2023, 15, 9034. [Google Scholar] [CrossRef]
- Abdel-mawgoud, H.; Kamel, S.; Ebeed, M.; Aly, M.M. An efficient hybrid approach for optimal allocation of DG in radial distribution networks. In Proceedings of the 2018 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 19–21 February 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 311–316. [Google Scholar]
- Mena, A.J.G.; García, J.A.M. An efficient approach for the siting and sizing problem of distributed generation. Int. J. Electr. Power Energy Syst. 2015, 69, 167–172. [Google Scholar] [CrossRef]
- Ullah, Z.; Wang, S.; Radosavljević, J.; Lai, J. A Solution to the Optimal Power Flow Problem Considering WT and PV Generation. IEEE Access 2019, 7, 46763–46772. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.; Amaratunga, G.A. Optimal power flow solutions incorporating stochastic wind and solar power. Energy Convers. Manag. 2017, 148, 1194–1207. [Google Scholar] [CrossRef]
- Elattar, E.E. Optimal Power Flow of a Power System Incorporating Stochastic Wind Power Based on Modified Moth Swarm Algorithm. IEEE Access 2019, 7, 89581–89593. [Google Scholar] [CrossRef]
- Ismail, B.; Wahab, N.I.A.; Othman, M.L.; Radzi, M.A.M.; Vijyakumar, K.N.; Naain, M.N.M. A Comprehensive Review on Optimal Location and Sizing of Reactive Power Compensation Using Hybrid-Based Approaches for Power Loss Reduction, Voltage Stability Improvement, Voltage Profile Enhancement and Loadability Enhancement. IEEE Access 2020, 8, 222733–222765. [Google Scholar] [CrossRef]
- Chen, M.; Tan, Y. SF-FWA: A Self-Adaptive Fast Fireworks Algorithm for effective large-scale optimization. Swarm Evol. Comput. 2023, 80, 101314. [Google Scholar] [CrossRef]
- Singh, P.; Pasha, J.; Moses, R.; Sobanjo, J.; Ozguven, E.E.; Dulebenets, M.A. Development of exact and heuristic optimization methods for safety improvement projects at level crossings under conflicting objectives. Reliab. Eng. Syst. Saf. 2022, 220, 108296. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elements | Numbers | Description |
|---|---|---|
| Buses | 30 | - |
| Lines or Branches | 41 | - |
| Thermal generators | 6 | Buses 1 (slack), 2, 5, 8, 11, and 13 |
| Candidate buses | 27, 29, and 30 | |
| Shunt VAR compensations | 9 | Exists at buses 10, 12, 15, 17, 20, 21, 23, 24, and 29 |
| Transformer with tap changer | 4 | As illustrated in Figure 1, in between bus 6 and 9, bus 6 and 10, bus 4 and 12, and bus 28 and 27. |
| Control variables | 24 | - |
| Total load demand | 283.4 MW, 126.2 MVAr | |
| Bus voltage limits | 24 | [0.95–1.1] p.u. |
| N-l Faulty Lines | Line Overloaded | Overloading % | VDI | OLI | SI |
|---|---|---|---|---|---|
| F27-29 | L27-30 | 104.5 | 0.43 | 0.52 | 0.48 |
| F27-30 | L27-29 | 105.9 | 0.84 | 0.53 | 0.68 |
| Cases (With 25% Load Increase) | F27-30 (Without RDGs) | F27-29 (Without RDGs) | F27-30 (With RDGs) | F27-30 (With RDGs) Solution Availability for F27-29 | |
|---|---|---|---|---|---|
| Active power generation (MW) | PG1 | 195.8832 | 194.6555 | 190.7187 | 192.1811 |
| PG2 | 67.9428 | 68.9663 | 53.5538 | 59.8507 | |
| PG5 | 38.6242 | 29.0220 | 23.8832 | 25.0275 | |
| PG8 | 18.6940 | 22.4843 | 34.7042 | 30.3884 | |
| PG11 | 24.3639 | 24.7163 | 15.8465 | 17.7960 | |
| PG13 | 22.1504 | 28.3716 | 22.8114 | 16.0069 | |
| PDG27 | -- | -- | -- | -- | |
| PDG29 | -- | -- | -- | -- | |
| PDG30 | -- | -- | 24.8478 | 24.8478 | |
| Generator voltages (p.u) | VG1 | 1.10 | 1.10 | 1.10 | 1.10 |
| VG2 | 1.0609 | 1.0483 | 1.0394 | 1.0561 | |
| VG5 | 1.0409 | 1.0183 | 0.9990 | 1.0183 | |
| VG8 | 1.0573 | 1.0269 | 1.0109 | 1.0281 | |
| VG11 | 1.0494 | 0.9969 | 1.0987 | 1.0214 | |
| VG13 | 1.0996 | 1.0419 | 1.0025 | 1.0348 | |
| Transformer tap setting (p.u) | T6-9 | 1.0583 | 1.0235 | 0.9469 | 0.9305 |
| T6-10 | 1.0599 | 1.0279 | 1.0178 | 0.9996 | |
| T4-12 | 0.9894 | 0.9141 | 0.9685 | 1.0379 | |
| T28-27 | 0.9106 | 0.9000 | 1.0215 | 1.0215 | |
| Shunt VAR compensators (MVAr) | QC10 | 0.7373 | 1.8317 | 1.6583 | 2.6411 |
| QC12 | 3.6098 | 6.5815 × 10−4 | 3.1197 | 3.4400 | |
| QC15 | 2.2445 | 3.9986 | 4.4232 | 4.9198 | |
| QC17 | 3.3488 | 3.4135 | 1.4395 | 3.2175 | |
| QC20 | 0.9892 | 0.0898 | 3.7446 | 4.3734 | |
| QC21 | 0.8372 | 0.9975 | 1.5051 | 3.9971 | |
| QC23 | 3.3566 | 1.5487 × 10−4 | 4.7056 | 2.8811 | |
| QC24 | 1.8415 | 2.6282 | 0.9235 | 0.7264 | |
| QC29 | 4.2531 | 4.0045 | 3.0197 | 2.0162 | |
| Total cost ($/h) | 1.2911 × 103 | 1.2250 × 103 | 979.38 | 976.66 | |
| Power losses (MW) | 13.4091 | 13.9662 | 12.1157 | 11.8485 | |
| Voltage Deviation | 0.8370 | 0.4316 | 0.2808 | 0.3482 | |
| Objective function ($/h) | 1.7200 × 103 | 1.5837 × 103 | 1.2718 × 103 | 1.2774 × 103 | |
| Algorithm | Performance Indicators | Elapsed Time (Seconds) | |||
|---|---|---|---|---|---|
| Min | Max | Mean | STD. | ||
| CS-FFA | 1.2405 × 103 | 1.3056 × 103 | 1.2715 × 103 | 14.31 | 29.06 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Shamma’a, A.A.; Hussein Farh, H.M.; Alsharabi, K. Integrating Firefly and Crow Algorithms for the Resilient Sizing and Siting of Renewable Distributed Generation Systems under Faulty Scenarios. Sustainability 2024, 16, 1521. https://doi.org/10.3390/su16041521
Al-Shamma’a AA, Hussein Farh HM, Alsharabi K. Integrating Firefly and Crow Algorithms for the Resilient Sizing and Siting of Renewable Distributed Generation Systems under Faulty Scenarios. Sustainability. 2024; 16(4):1521. https://doi.org/10.3390/su16041521
Chicago/Turabian StyleAl-Shamma’a, Abdullrahman A., Hassan M. Hussein Farh, and Khalil Alsharabi. 2024. "Integrating Firefly and Crow Algorithms for the Resilient Sizing and Siting of Renewable Distributed Generation Systems under Faulty Scenarios" Sustainability 16, no. 4: 1521. https://doi.org/10.3390/su16041521